
Hazard Prediction of Water Inrush in Water-Rich Tunnels Based on Random Forest Algorithm

Abstract
1. Introduction
2. Construction of Evaluating Indicator System and Grading Standards
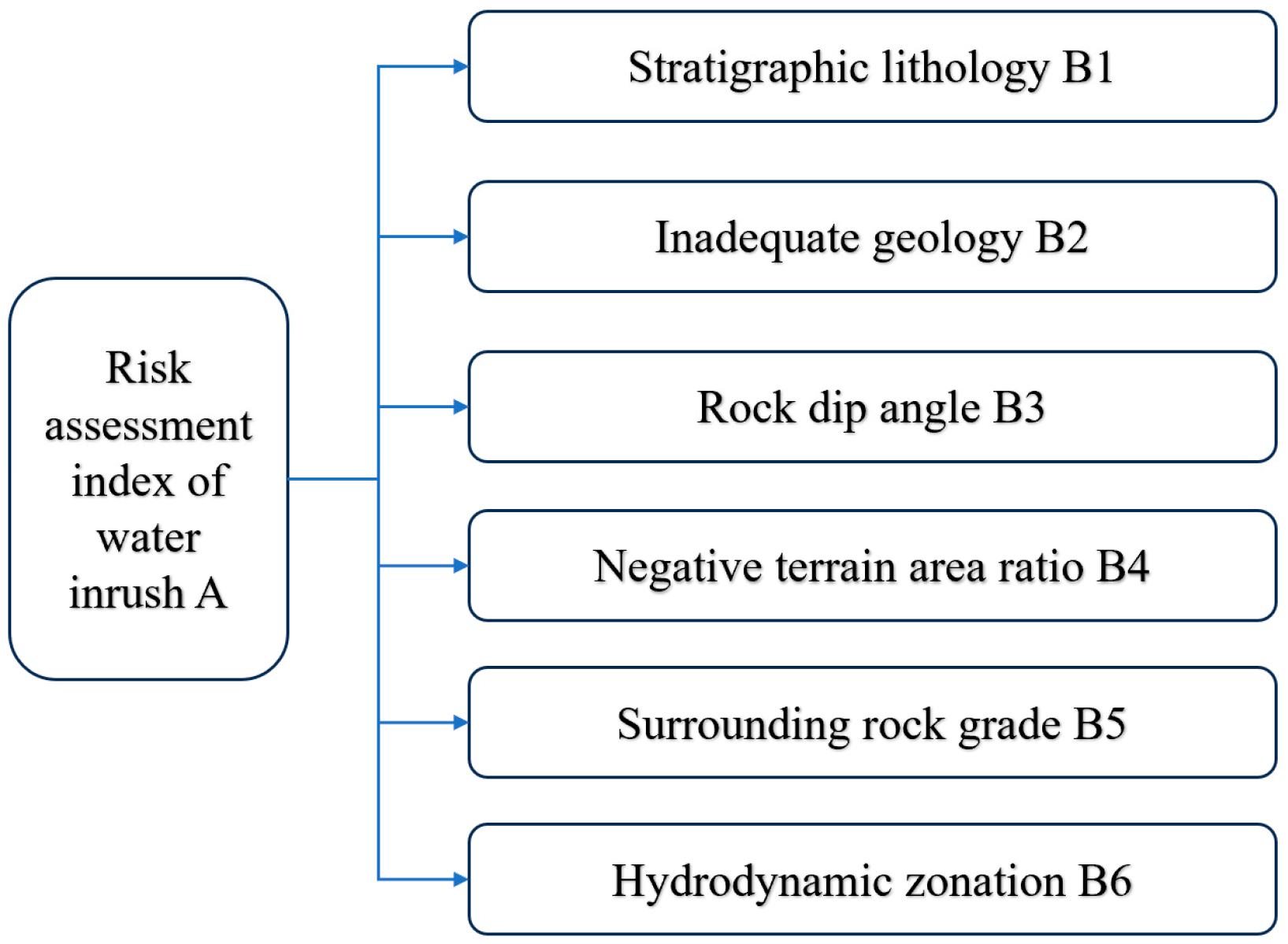
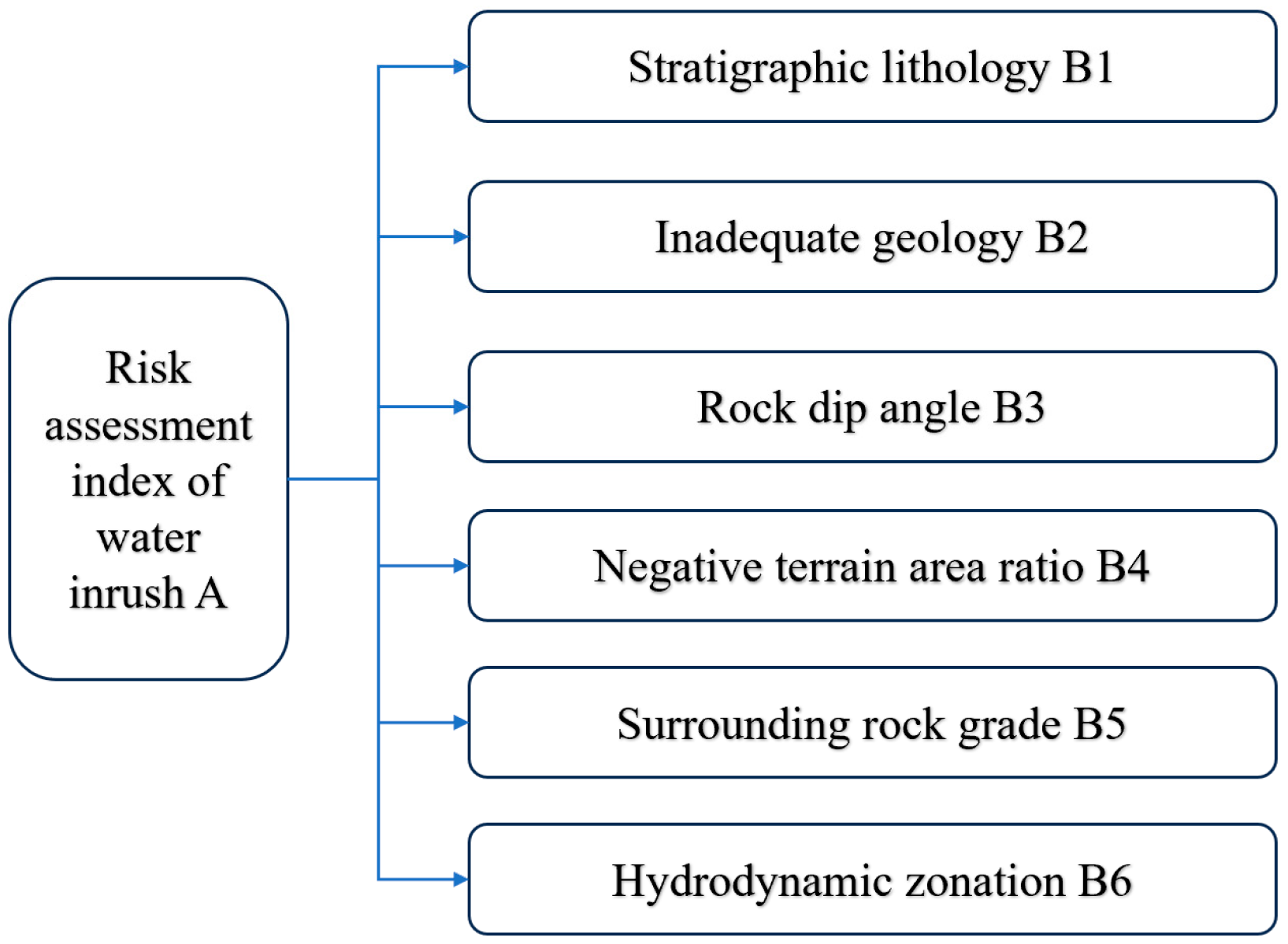
2.1. Construction of Evaluating Indicator System
- (1)
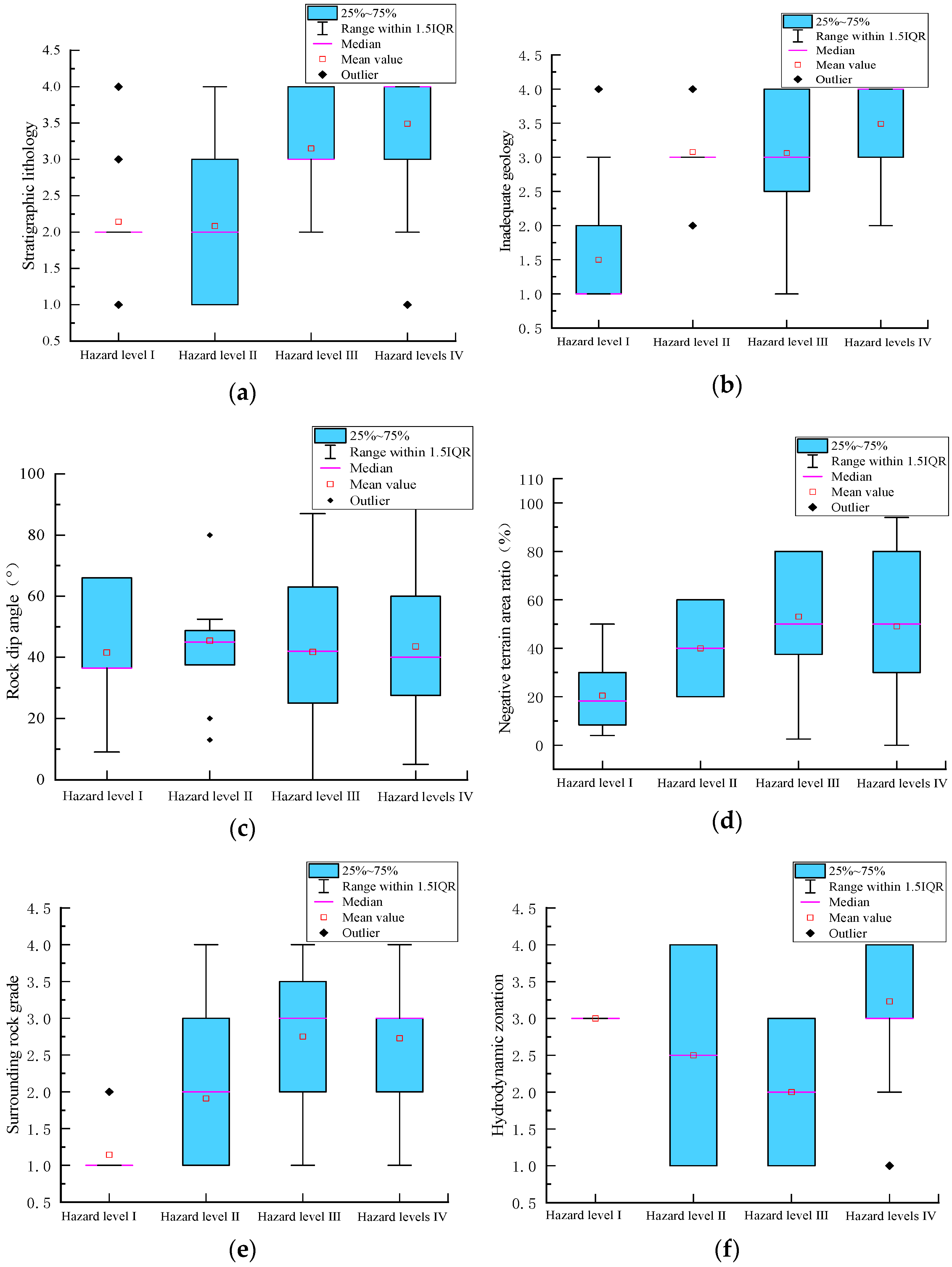
- Stratigraphic lithology B1: Stratigraphic lithology is one of the main material foundations that lead to karst development. Due to the different erosion and dissolution properties of rock minerals in groundwater, different rock types lead to different occurrence characteristics of water-bearing structures. Generally speaking, water inrush disasters in water-rich tunnels are more likely to occur in carbonate formations with higher solubility, such as limestone, dolomite, and other karst formations.
- (2)
- Inadequate geology B2: Inadequate geology refers to the channels and flow paths of underground water systems, including water storage structures, karst pipelines, underground rivers, fault fracture zones, and joint planes, which directly affect the scale of water inrush disasters in water-rich tunnels. The water-rich structural properties nurtured by these geological conditions determine the level of hazard when water inrush occurs in tunnels.
- (3)
- Rock dip angle B3: The rock dip angle has a significant impact on the flow of groundwater. The rock dip angle affects the path of karst water seepage, supply, and discharge by influencing the anisotropic characteristics of rock permeability. Generally speaking, the permeability parallel to the rock layer is much greater than that perpendicular to the rock layer. However, when the dip angle of the rock layer is too large, the area of the water-rich surface is small, leading to less groundwater circulation and poor erosivity. If the dip angle of karst is too small, it is not conducive to the smooth infiltration of groundwater into karst strata.
- (4)
- Negative terrain area ratio B4: The negative terrain area ratio determines the recharge capacity of groundwater. Landforms such as depressions, subsidence, and sinkholes on the surface make it easier for surface water to accumulate and recharge to the run-off area of groundwater through seepage.
- (5)
- Surrounding rock grade B5: The surrounding rock grade reflects the integrity, strength, and deformation resistance of the surrounding rock. When the surrounding rock grade is high, the integrity, strength, and deformation resistance of the surrounding rock are poor, which leads to higher groundwater permeability and the formation of water conducting channels. Moreover, the surrounding rock with high grade often appears in weak zones, such as fractured zones and dissolution cavities, which can easily cause water inrush disasters in water-rich tunnels.
- (6)
- Hydrodynamic zonation B6: The groundwater system is one of the decisive factors in the occurrence of karst in tunnels. The possibility and characteristics of water inrush vary depending on the karst hydrodynamic zonation in which the water-rich tunnel is located. The hydrodynamic zonation in which the tunnel is located is an important factor determining the characteristics and water inflow of water inrush.
2.2. Grading Criteria
2.2.1. Classification of Evaluating Indicators
2.2.2. Classification of Hazard Levels of Water Inrush
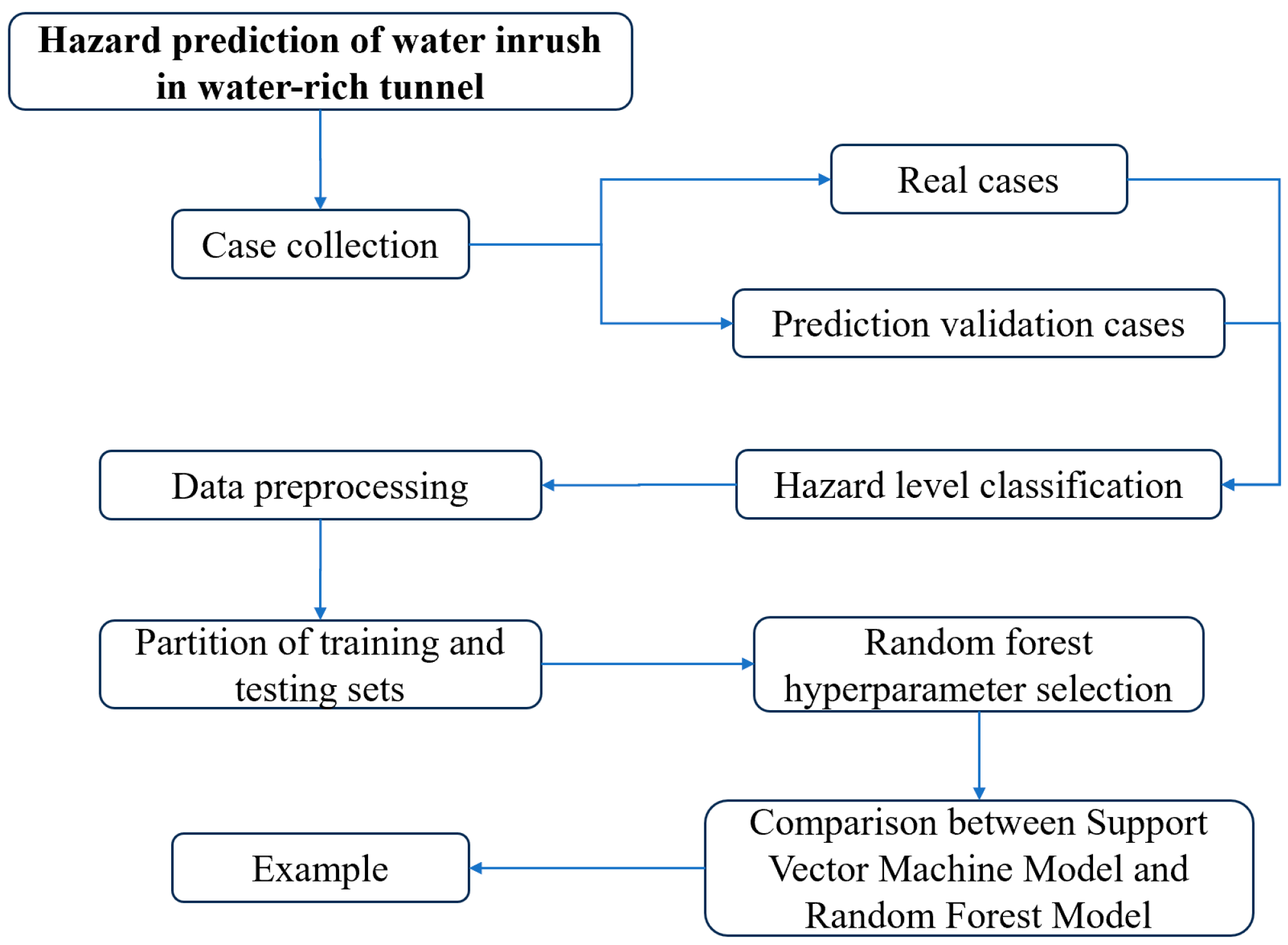
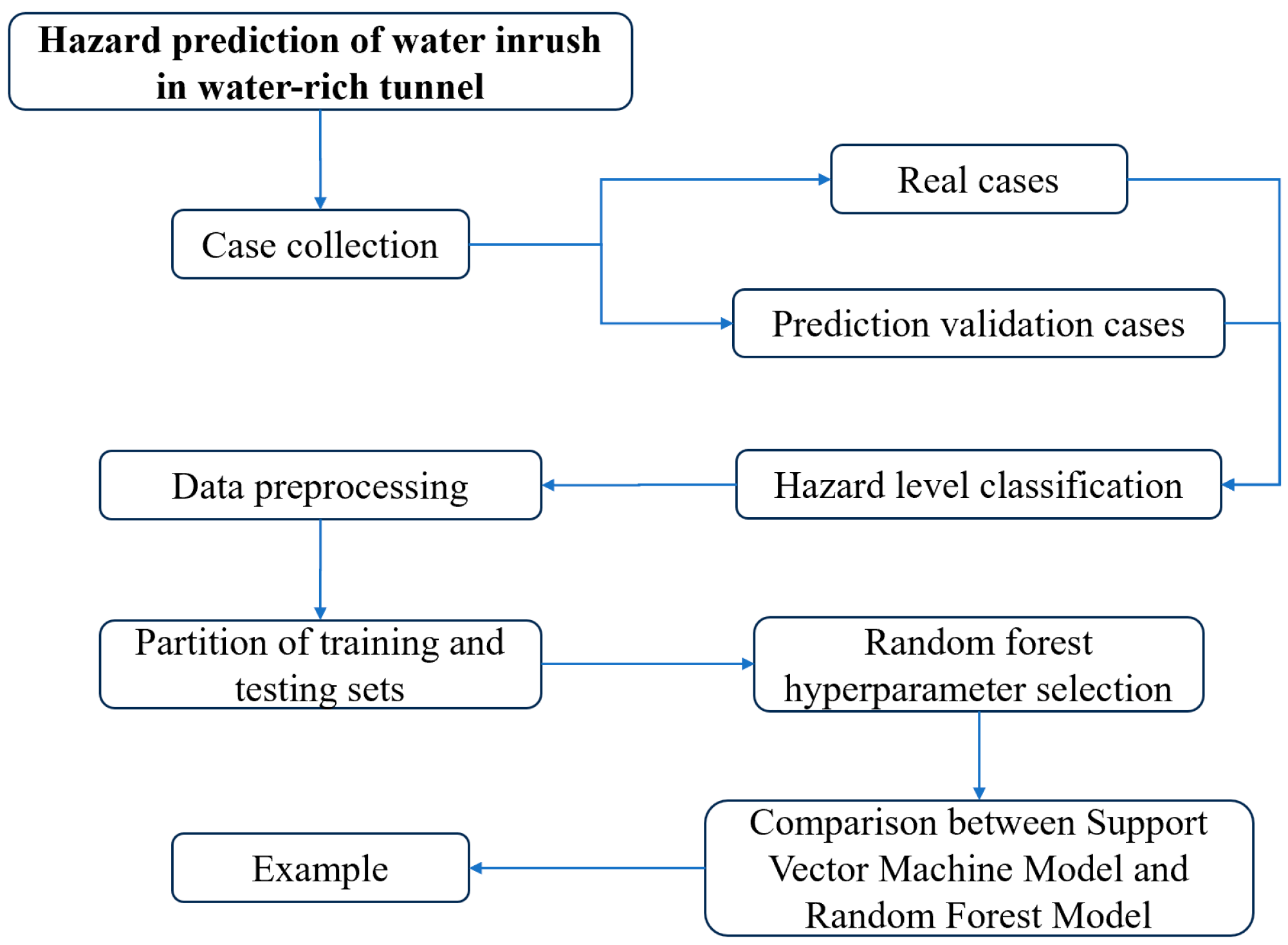
3. Methodology: Establishment of a Prediction Model for the Hazard of Water Inrush in a Water-Rich Tunnel
3.1. Principles of the RF Algorithm
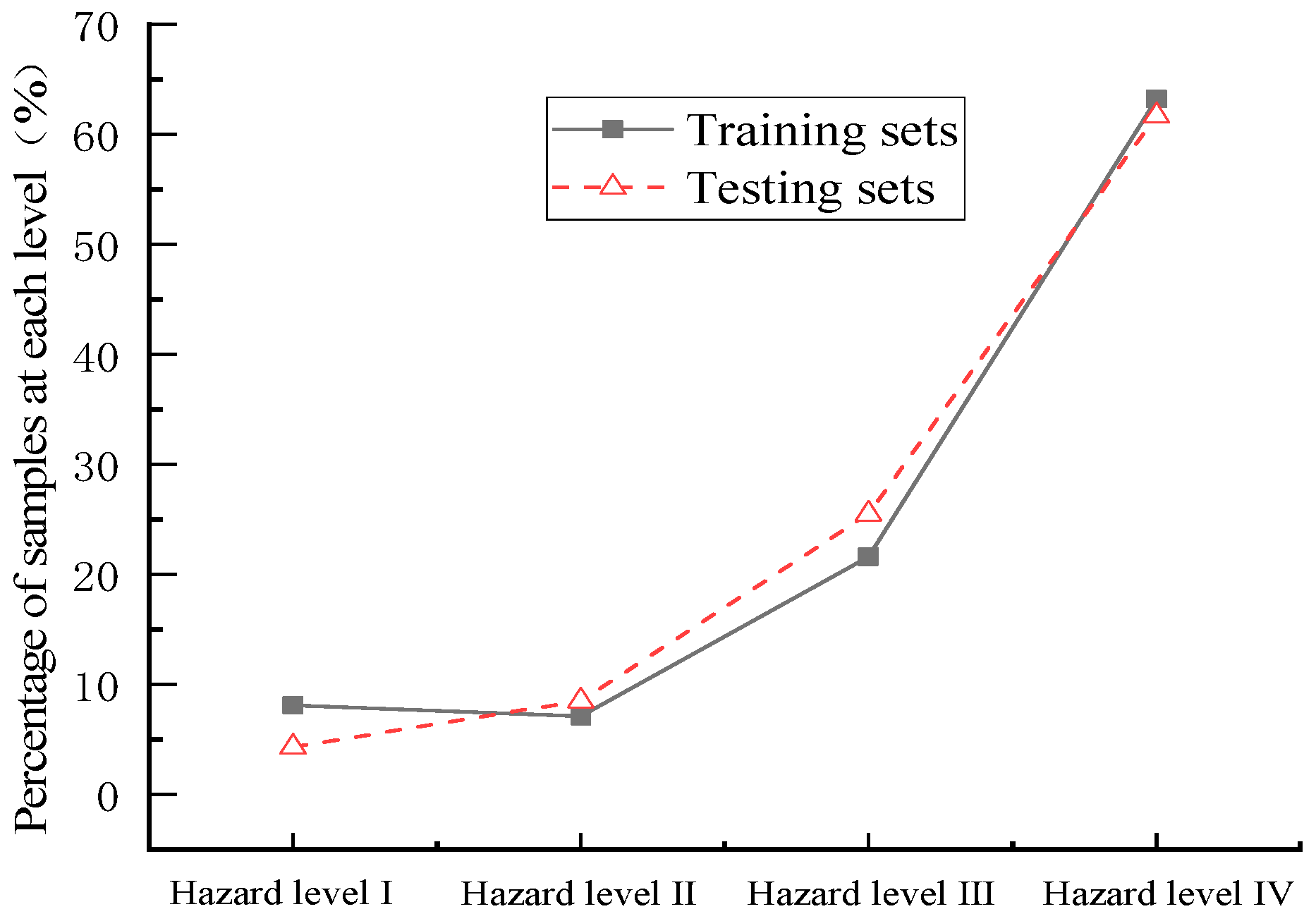
3.2. Division of Training and Testing Sets
3.3. Preprocessing of Data
3.3.1. Data Numerical Processing
3.3.2. Detection and Replacement of Outliers
3.3.3. Missing Data Supplementation
3.3.4. Data Standardization
3.4. Optimization of Hyperparameters
3.5. Comparative Testing
4. Results: Engineering Case Verification
5. Conclusions
- (1)
- Through the analysis of a large number of cases of water inrush accidents, indicators suitable for the hazard assessment of water inrush in water-rich tunnels were selected, an evaluating indicator system was constructed, and each classification of each evaluating indicator was obtained. The classification criteria for the hazard level of water inrush in water-rich tunnels in this article were established.
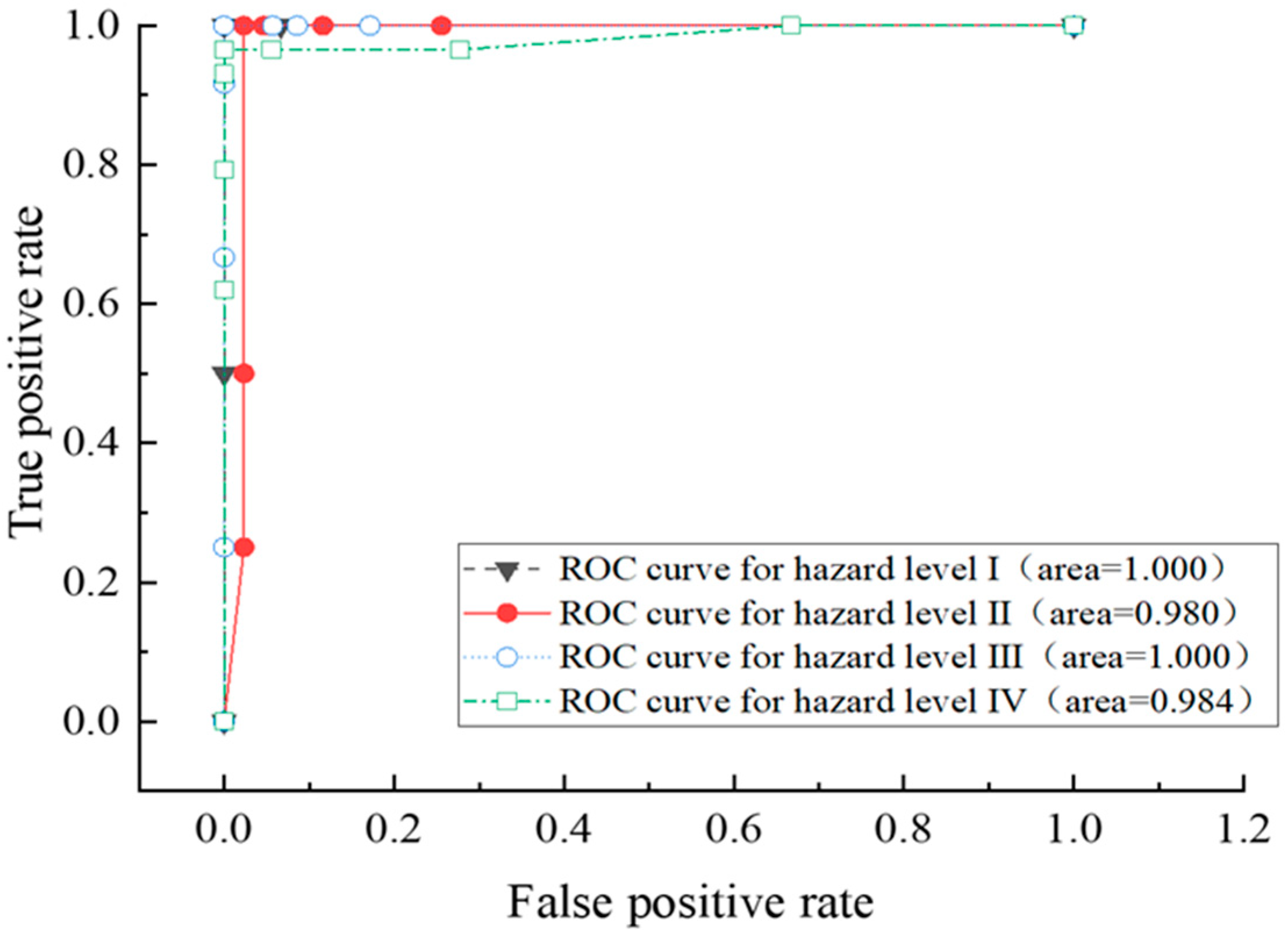
- (2)
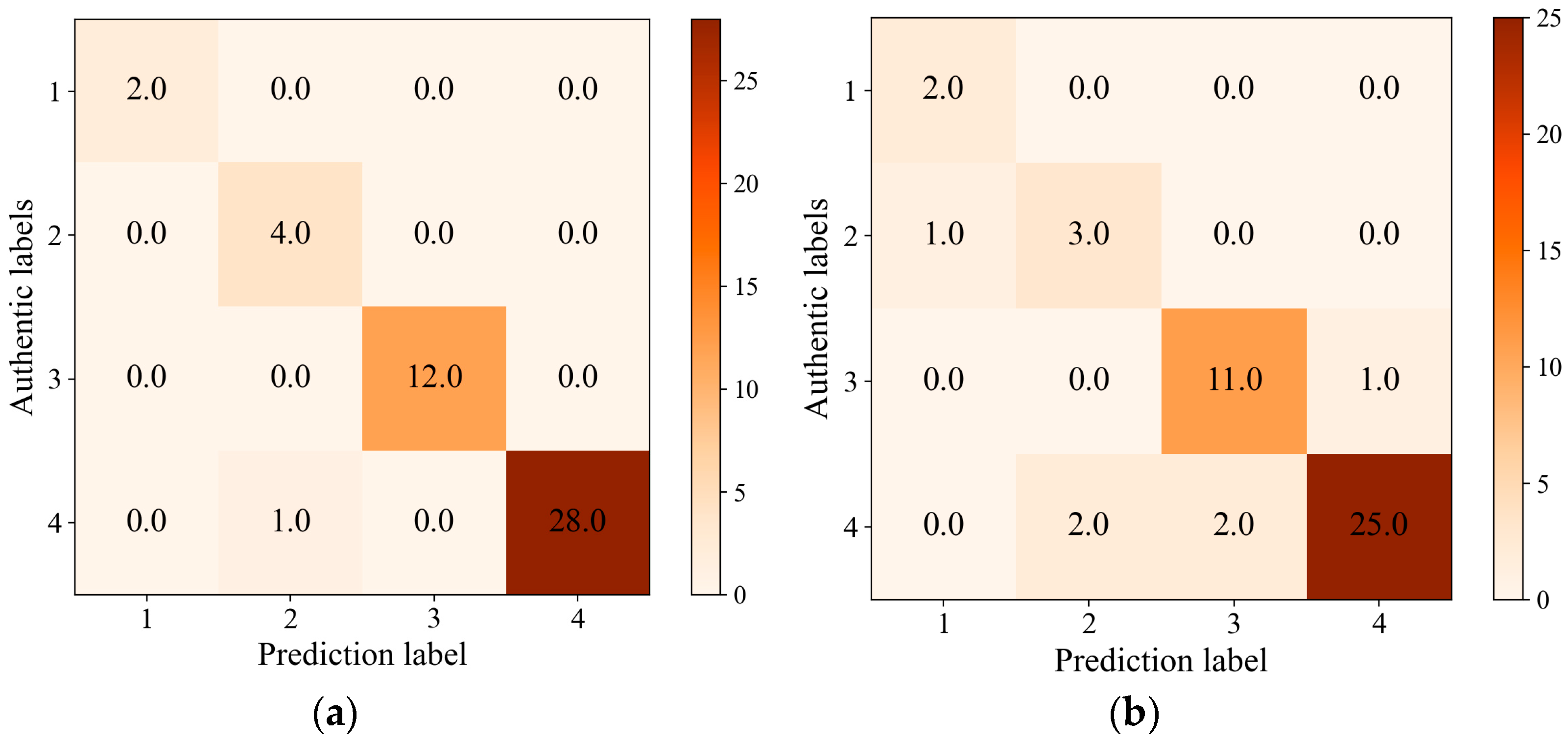
- After ten-fold cross validation and optimization of the hyperparameters, the AUC values of the four hazard levels in the ROC curve are all above 0.98. Further comparison was made between the RF model and the SVM model, and it was found that the prediction accuracy of the RF model reached 98%, which is significantly better than the 87% of the SVM. This indicates that the RF model has high applicability when predicting the hazard of water inrush in water-rich tunnels.
- (3)
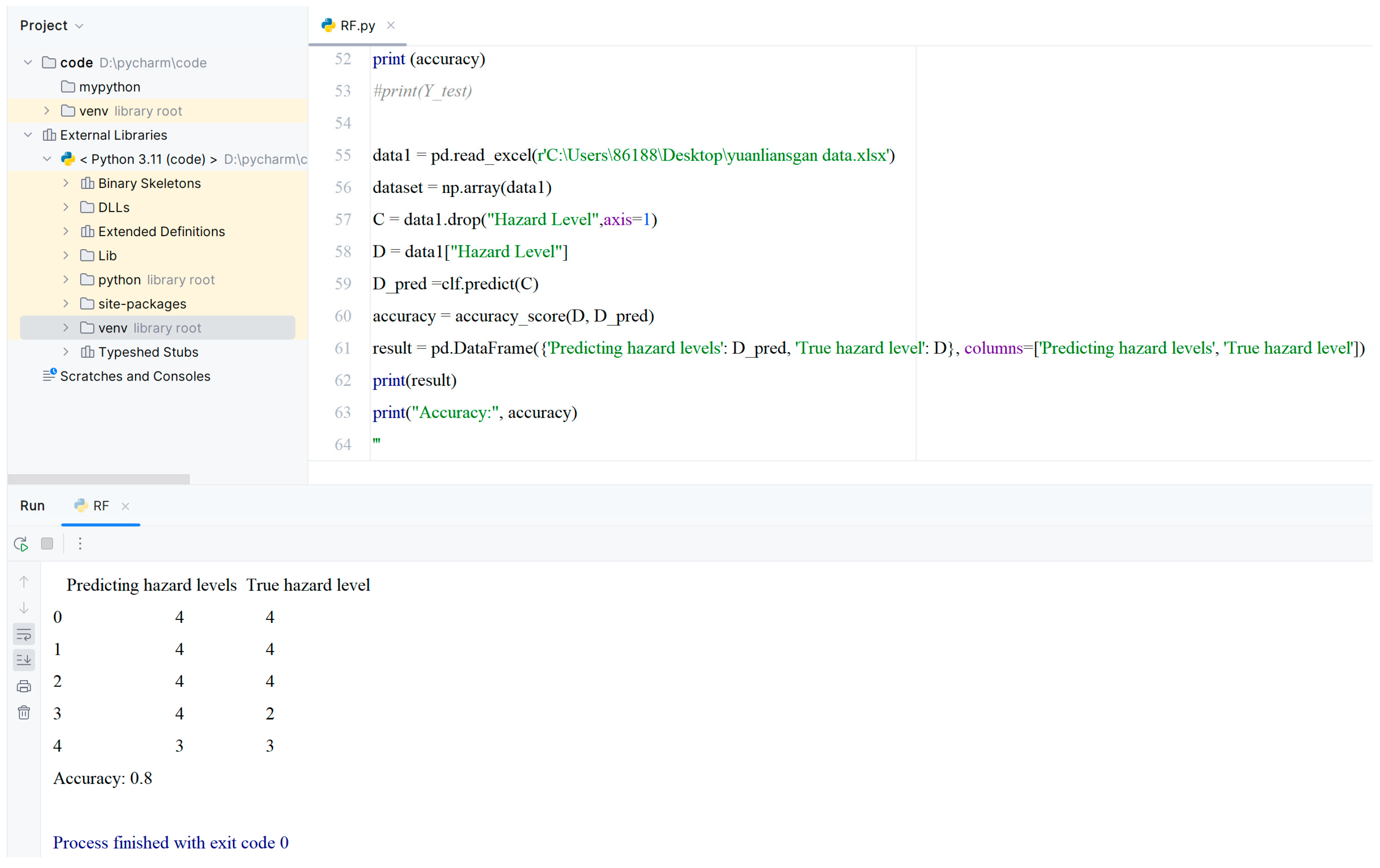
- Taking the water inrush accident in the Yuanliangshan tunnel as an example, the accuracy of the RF algorithm-based hazard prediction model of water inrush in a water-rich tunnel was verified. The results show that the established model has strong applicability and high accuracy when predicting water inrush in a water-rich tunnel, and can be applied to practical engineering when identifying water inrush hazards in a water-rich tunnel.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| RF | Random forest |
| SVM | Support vector machine |
| AHP | Analytic hierarchy process |
| ROC | Receiver operating characteristic |
| BP | Back propagation |
| RBF | Radial basis function |
| AUC | Area under curve |
References
- Rupp, M.; Schneckenburger, M.; Merkel, M.; Börret, R.; Harrison, D.K. Industry 4.0: A Technological-Oriented Definition Based on Bibliometric Analysis and Literature Review. J. Open Innov. Technol. Mark. Complex. 2021, 7, 68. [Google Scholar] [CrossRef]
- Cacciuttolo, C.; Guzmán, V.; Catriñir, P.; Atencio, E.; Komarizadehasl, S.; Lozano-Galant, J.A. Low-Cost Sensors Technologies for Monitoring Sustainability and Safety Issues in Mining Activities: Advances, Gaps, and Future Directions in the Digitalization for Smart Mining. Sensors 2023, 23, 6846. [Google Scholar] [CrossRef] [PubMed]
- Du, Y.C.; Han, X.R.; Li, Z.L. Professional Evaluating System for Karst Tunnel Gushing Based on AHP and Its Application. Carsologica Sin. 2009, 28, 281–287. [Google Scholar]
- Zhang, W.Q.; Liu, Y. Multilevel Fuzzy Comprehensive Evaluation of Water Inrush in Karst Tunnels. J. Xi’an Univ. Sci. Technol. 2016, 36, 187–192. [Google Scholar]
- Hou, D.S.; Zhang, X.; Wang, L. Risk Evaluation of Tunnel Water lnrush Based on Comprehensive Weighting-TOPSIS Method and Its Application. Tunn. Constr. 2017, 37, 691–699. [Google Scholar]
- Zhou, Z.Q.; Kong, J.; Yang, W.M.; Chen, Y.P.; Zhang, Q.; Li, L.P.; Shi, S.S. Improved Attribute Interval Recognition Method and Its application in Risk Assessment of Water Inrush in Tunnels. J. Cent. South Univ. (Sci. Technol.) 2020, 51, 1703–1711. [Google Scholar]
- Saeid, S.; Panos, K. A Novel Anomaly-Based Intrusion Detection Model Using PSOGWO-Optimized BP Neural Network and GA-Based Feature Selection. Sensors 2022, 22, 9318. [Google Scholar]
- Kosarac, A.; Cep, R.; Trochta, M.; Knezev, M.; Zivkovic, A.; Mladjenovic, C.; Antic, A. Thermal Behavior Modeling Based on BP Neural Network in Keras Framework for Motorized Machine Tool Spindles. Materials 2022, 15, 7782. [Google Scholar] [CrossRef]
- Wei, X.Y.; Jin, C.L.; Gong, L.; Zhang, X.; Ma, M.H. Risk Evaluation of Railway Tunnel Water Inrush Based on PCA-Improved RBF Neural Network Model. J. Railw. Sci. Eng. 2021, 18, 794–802. [Google Scholar]
- Du, C.C.; Wang, X.; Wang, Z.; Wang, D.H. Data-driven dynamics reconstruction using RBF network. Mach. Learn. Sci. Technol. 2023, 4, 045016. [Google Scholar] [CrossRef]
- Zhang, W.; Bao, X.Y. Study on Evaluation of Negative Effect Grade of Tunnel Groundwater Environment Based on SVR. Railw. Stand. Des. 2021, 65, 148–153. [Google Scholar]
- Melgarejo-Morales, A.; Vazquez-Becerra, G.E.; Millan-Almaraz, J.R.; Martinez-Felix, C.A.; Shah, M. Applying support vector machine (SVM) using GPS-TEC and Space Weather parameters to distinguish ionospheric disturbances possibly related to earthquakes. Adv. Space Res. 2023, 72, 4420–4434. [Google Scholar] [CrossRef]
- Hao, Q.; Wu, X.; Mu, W.P.; Deng, R.C.; Hu, B.Y.; Gao, Y. Groundwater Source Determination of Mine lnflow or lnrush Using a Random Forest Model. Sci. Technol. Eng. 2020, 20, 6411–6418. [Google Scholar]
- Bo, C.H. Research on Intelligent Prediction Method of Hazard Risk of Water and Mud inrush in Karst Tunnel Based on Machine Learning. Master’s Thesis, Shandong University, Jinan, China, 2021. [Google Scholar]
- Ren, R.; Xu, M. BP network prediction of water inrush volume in tunnels in barrier anticline structural areas. Mod. Tunn. Technol. 2011, 6, 47–52. [Google Scholar]
- Huang, X.J. Prediction and Forecast of Maluqing Tunnel + 978 Melting Cavity of Yiwan Railway. Mod. Tunn. Technol. 2011, 48, 128–132. [Google Scholar]
- Zhang, K.; Zheng, W.; Xu, C.; Chen, S. An Improved Extension System for Assessing Risk of Water Inrush in Tunnels in Carbonate Karst Terrain. KSCE J. Civ. Eng. 2019, 23, 2049–2064. [Google Scholar] [CrossRef]
- Chu, H.; Xu, G.; Yasufuku, N.; Yu, Z.; Liu, P.; Wang, J. Risk Assessment of Water Inrush in Karst Tunnels Based on Two-Class Fuzzy Comprehensive Evaluation Method. Arab. J. Geosci. 2017, 10, 179. [Google Scholar] [CrossRef]
- Li, L.; Lei, T.; Li, S.; Zhang, Q.; Xu, Z.; Shi, S.; Zhou, Z. Risk Assessment of Water Inrush in Karst Tunnels and Software Development. Arab. J. Geosci. 2015, 4, 1843–1854. [Google Scholar] [CrossRef]
- Li, L.P.; Li, S.C.; Chen, J.; Li, J.L.; Xu, Z.H.; Shi, S.S. Construction License Mechanism and Its Application Based on Karst Water Inrush Risk Evaluation. Chin. J. Rock Mech. Eng. 2011, 30, 1345–1354. [Google Scholar]
- Li, S.C.; Zhou, Z.Q.; Li, L.P.; Xu, Z.H.; Zhang, Q.Q.; Shi, S.S. Risk Assessment of Water Inrush in Karst Tunnels Based on Attribute Synthetic Evaluation System. Tunn. Undergr. Space Technol. 2013, 38, 50–58. [Google Scholar] [CrossRef]
- Mao, B.Y.; Xu, M.; Jiang, L.W. Preliminary Study on Risk Assessment of Water and Mud Inrush in Karst Tunnel. Carsologica Sin. 2010, 29, 183–189. [Google Scholar]
- Shen, X.M.; Liu, P.L.; Wang, J.F. Evaluation of Water Inrush Risks of Karst Tunnel with Analytic Hierarchy Process. J. Railw. Eng. Soc. 2010, 12, 56–63. [Google Scholar]
- Xian, M.; Xiong, W. Risk assessment of water inrush in karst shallow tunnel under river based on SPA model. Chin. J. Appl. Mech. 2023, 40, 135–145. [Google Scholar]
- Jia, J.; Zhao, L.M.; Yu, Z.T.; Xie, R.Q.; Luo, Y.Z. Karst Development Characteristics and Water Inrush Risk Assessment of Railway Tunnel in a Difficult and Dangerous Mountain Area. Northwest. Geol. 2023, 56, 258–267. [Google Scholar]
- Li, Z.Y.; Wang, Y.C.; Liu, Y.; Jiao, Q.L.; Wang, M.T.; Zhang, Y. Model on variable weight−target approaching for risk assessment of water and mud inrush in intrusive contact tunnels. J. Cent. South Univ. (Sci. Technol.) 2019, 50, 2773–2782. [Google Scholar]
- Yang, Z. Risk prediction of water inrush of karst tunnels based on bp neural network. In Proceedings of the International Conference on Mechanical Materials and Manufacturing Engineering, London, UK, 18–19 January 2016; Atlantis Press: Amsterdam, The Netherlands, 2016; pp. 327–330. [Google Scholar]
- Yang, X.; Zhang, S. Risk assessment model of tunnel water inrush based on improved attribute mathematical theory. J. Cent. South Univ. 2018, 25, 379–391. [Google Scholar] [CrossRef]
- Gu, G.Q.; Li, X.H. Exponential Weighted Smoothing Prediction Model Based on Abnormal Detection of Box-plot. Comput. Mod. 2021, 1, 28–33. [Google Scholar]
- Cochran, J.M.; Leproux, A.; Busch, D.R.; O’sullivan, T.D.; Yang, W.; Mehta, R.S.; Police, A.M.; Tromberg, B.J.; Yodh, A.G. Breast cancer differential diagnosis using diffuse optical spectroscopic imaging and regression with z-score normalized data. J. Biomed. Opt. 2021, 26, 026004. [Google Scholar] [CrossRef]
- Chik, Z.; Aljanabi, Q.A.; Kasa, A.; Taha, M.R. Ten-fold cross validation artificial neural network modeling of the settlement behavior of a stone column under a highway embankment. Arab. J. Geosci. 2014, 7, 4877–4887. [Google Scholar] [CrossRef]
- Ierimonti, L.; Venanzi, I.; Ubertini, F. ROC analysis-based optimal design of a spatio-temporal online seismic monitoring system for precast industrial buildings. Bull. Earthq. Eng. 2021, 19, 1441–1466. [Google Scholar] [CrossRef]
- Wang, L. Prediction of water inflow in Southwest Karst Crossing Mountain Tunnel Based on Genetic Algorithm and Support Vector Machine. Master’s Thesis, Chengdu University of Technology, Chengdu, China, 2020. [Google Scholar]
- Zhang, M.Q.; Liu, Z.W. The analysis on the features of karst water burst in the Yuanliangshan tunnel. J. Geotech. Eng. 2005, 27, 422–426. [Google Scholar]
- Zeng, W.; Zhang, M.Q. Analysis and research on mud burst caused by explosive spraying in the No. 3 karst cave of Yuanliangshan Tunnel. In Highway Transportation Technology (Applied Technology Edition); Railway Engineering: Beijing, China, 2008; pp. 158–161. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Grade Indicator | IV | III | II | I |
|---|---|---|---|---|
| Stratigraphic lithology | Limestone, marble | Dolomitic limestone, argillaceous limestone, calcareous dolomite, dolomite | Argillaceous limestone, argillaceous dolomite, argillaceous limestone | Sandstone, shale, mudstone |
| Inadequate geology | Strong disaster causing (core of fold) | Moderately disaster inducing (wing of fold) | Weakly disaster inducing (monoclinic) | none (feeble) |
| Rock dip angle (°) | 25–65 | 10–25/65–80 | 80–90 | 0–10 |
| Negative terrain area ratio (%) | >60 | 40–60 | 20–40 | 0–20 |
| Surrounding rock grade | V or VI | IV | III | I or II |
| Hydrodynamic zonation | Horizontal runoff zone, saturation zone | Seasonal variation zone, alternating zone | Deep circulation zone | Vertical infiltration zone |
| level of Water Inrush | Hazard Manifestation |
|---|---|
| I | The water inrush of the tunnel is less than 1000 m3/d or the mud inrush is less than 500 m3 |
| II | The water inrush of the tunnel is higher than 1000 m3/d and less than 3000 m3/d or the mud inrush is higher than 500 m3 and less than 1000 m3 |
| III | The water inrush of the tunnel is higher than 3000 m3/d and less than 10,000 m3/d or the mud inrush is higher than 1000 m3 and less than 2000 m3 |
| IV | The water inrush of the tunnel is higher than 10,000 m3/d or the mud inrush is higher than 2000 m3 |
| Accident Section | Data Processing | Stratigraphic Lithology | Inadequate Geology | Rock Dip Angle (°) | Negative Terrain Area Ratio (%) | Surrounding Rock Grade | Hydrodynamic Zonation | Amount of Water Inrush |
|---|---|---|---|---|---|---|---|---|
| Section 1 | Original data | Strong karst layer | Highly disaster inducing | 10–16 | Catchment area 7.5 km2 | IV | Pressure saturation zone | 108,000 m3/d |
| Numerization | 4 | 4 | 13 | 80 | 3 | 4 | 4 | |
| standardization | 1 | 1 | 0.15 | 0.84 | 0.67 | 1 | 4 | |
| Section 2 | Original data | Limestone dominated | Highly disaster inducing | 30–60 | Catchment area 6.5–9.1 km2 | — | saturation zone | 313,000 m3/d |
| Numerization | 4 | 4 | 45 | 80 | — | 4 | 4 | |
| standardization | 1 | 1 | 0.52 | 0.84 | 0.67 | 1 | 4 |
| Accident Section | Stratigraphic Lithology | Inadequate Geology | Rock Dip Angle (°) | Negative Terrain Area Ratio | Surrounding Rock Grade | Hydrodynamic Zonation | Amount of Water Inrush |
|---|---|---|---|---|---|---|---|
| Section 1 | Limestone | Large karst pipe, synclinal wing | 30 | — | V | Deep circulation zone | 25,992 m3/d |
| Section 2 | Limestone | Synclinal wing, karst cave | 25 | — | V | Deep circulation zone | 20,640 m3/d |
| Section 3 | Limestone | Synclinal wing, karst cave | 38–47 | Catchment area 110 km2 | V | — | 72,000 m3/d |
| Section 4 | Limestone | Synclinal wing | 35 | — | V | Deep circulation zone | 2400 m3/d |
| Section 5 | Dolomite | Anticlinal wing | — | — | V | — | 7992 m3/d |
| Accident Section | Stratigraphic Lithology | Inadequate Geology | Rock Dip Angle | Negative Terrain Area Ratio | Surrounding Rock Grade | Hydrodynamic Zonation |
|---|---|---|---|---|---|---|
| Section 1 | 0.8 | 0.9 | −0.7 | 0.1 | 1.55 | −1.81 |
| Section 2 | 0.8 | 0.9 | −0.96 | 0.1 | 1.55 | −1.81 |
| Section 3 | 0.8 | 0.9 | −0.05 | 1.55 | 1.55 | 0.76 |
| Section 4 | 0.8 | −0.29 | −0.44 | −0.32 | 1.55 | −1.81 |
| Section 5 | −0.34 | −0.29 | −0.09 | 0.29 | 1.55 | −0.53 |
| Accident Section | Actual Hazard Grades | Predicted Hazard Grades | Comparison between Predicted Results and Actual Results |
|---|---|---|---|
| Section 1 | 4 | 4 | Consistent |
| Section 2 | 4 | 4 | Consistent |
| Section 3 | 4 | 4 | Consistent |
| Section 4 | 2 | 4 | Inconsistent |
| Section 5 | 3 | 3 | Consistent |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, N.; Niu, M.; Wan, F.; Lu, J.; Wang, Y.; Yan, X.; Zhou, C. Hazard Prediction of Water Inrush in Water-Rich Tunnels Based on Random Forest Algorithm. Appl. Sci. 2024, 14, 867. https://doi.org/10.3390/app14020867
Zhang N, Niu M, Wan F, Lu J, Wang Y, Yan X, Zhou C. Hazard Prediction of Water Inrush in Water-Rich Tunnels Based on Random Forest Algorithm. Applied Sciences. 2024; 14(2):867. https://doi.org/10.3390/app14020867
Chicago/Turabian StyleZhang, Nian, Mengmeng Niu, Fei Wan, Jiale Lu, Yaoyao Wang, Xuehui Yan, and Caifeng Zhou. 2024. "Hazard Prediction of Water Inrush in Water-Rich Tunnels Based on Random Forest Algorithm" Applied Sciences 14, no. 2: 867. https://doi.org/10.3390/app14020867
APA StyleZhang, N., Niu, M., Wan, F., Lu, J., Wang, Y., Yan, X., & Zhou, C. (2024). Hazard Prediction of Water Inrush in Water-Rich Tunnels Based on Random Forest Algorithm. Applied Sciences, 14(2), 867. https://doi.org/10.3390/app14020867