
Motion Response of the Submersible Underwater Towed System as Cable Length Changes

Abstract
Featured Application
Abstract
1. Introduction
2. Computational Theory
2.1. Coordinate System
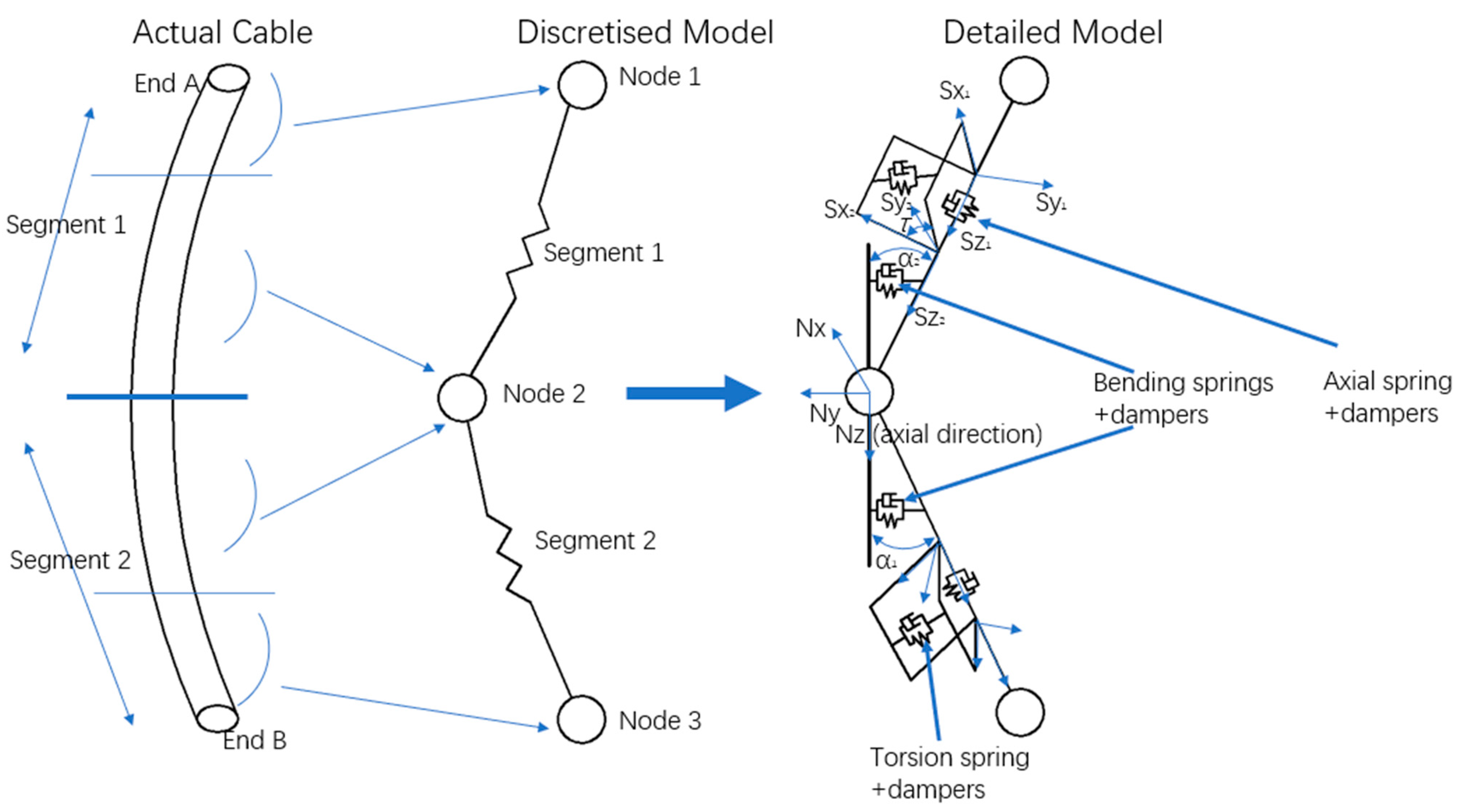
2.2. Governing Equation
- (1)
- Tension T can be treated elastically in terms of the stress–strain relationship, and its constitutive relationship can be represented by Hooke’s law.
- (2)
- Buoyancy B and gravity G. The buoyancy and gravity at node i can be expressed as follows:
- (3)
- Fluid drag force FDi. The drag force on the towed cable can be separated into oblique component drag and normal component drag, taking into account the strain impact on the cable. The expression is as follows:
2.3. Boundary Conditions
2.4. Solution Methods
3. Numerical Model Setup
4. Results and Discussion
4.1. Simple Maneuvering Motion
4.2. Composite Maneuvering Motion
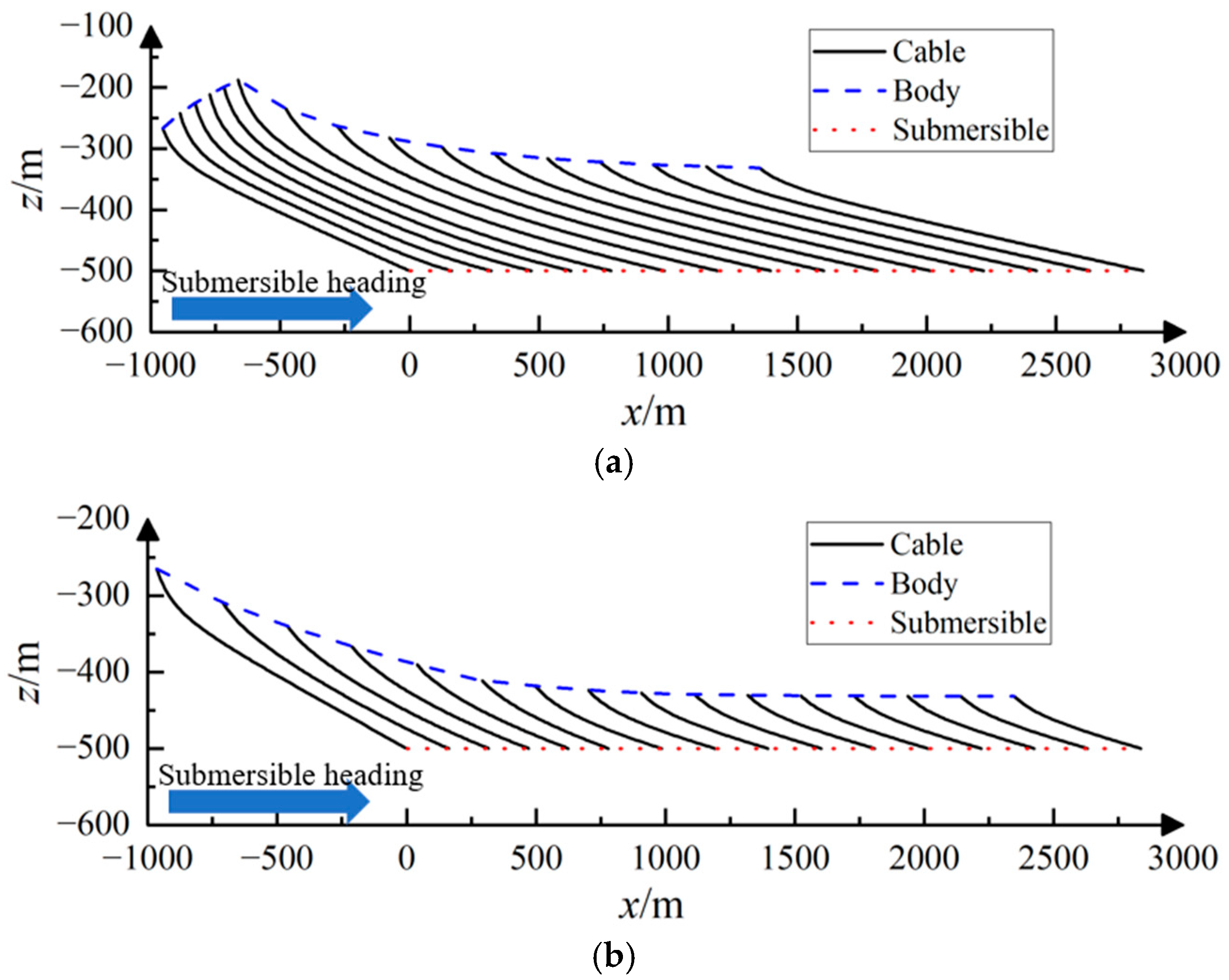
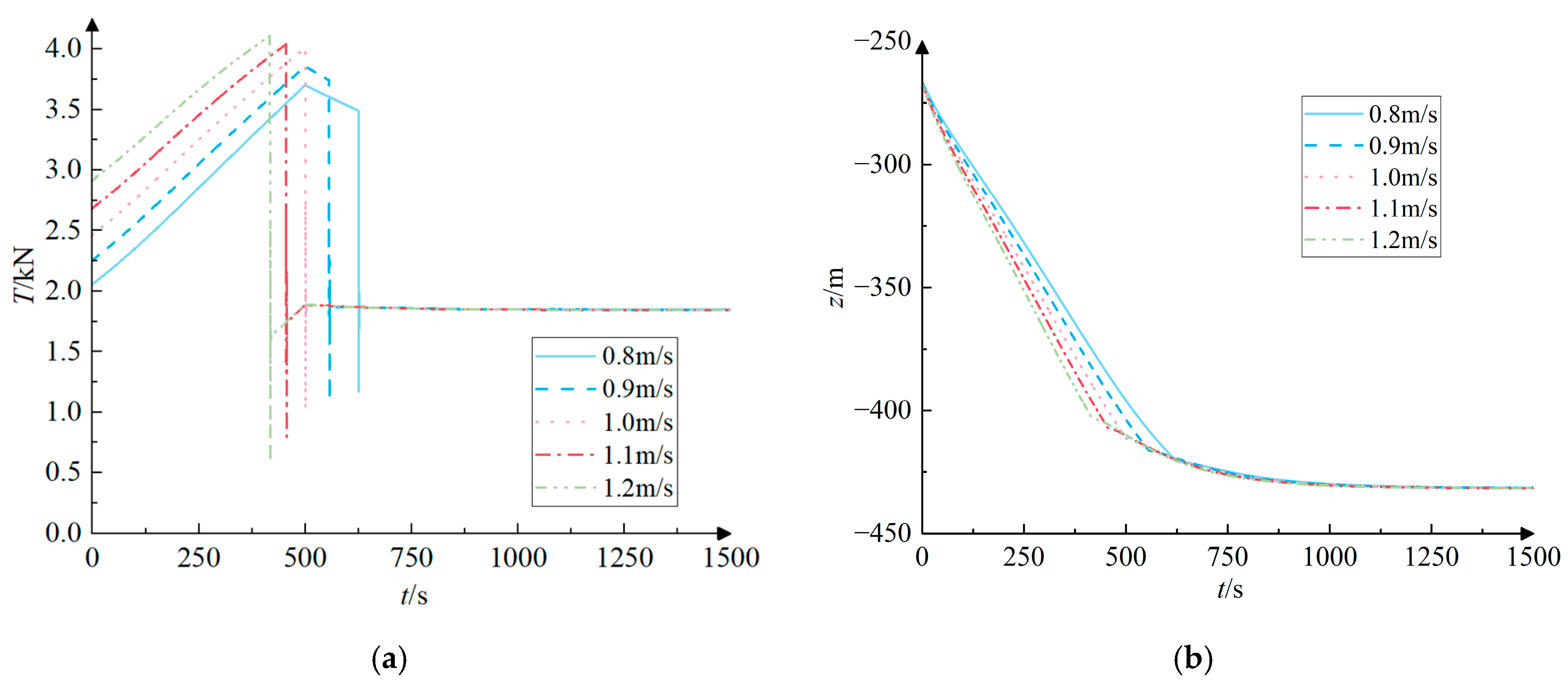
4.2.1. Accelerated Motion
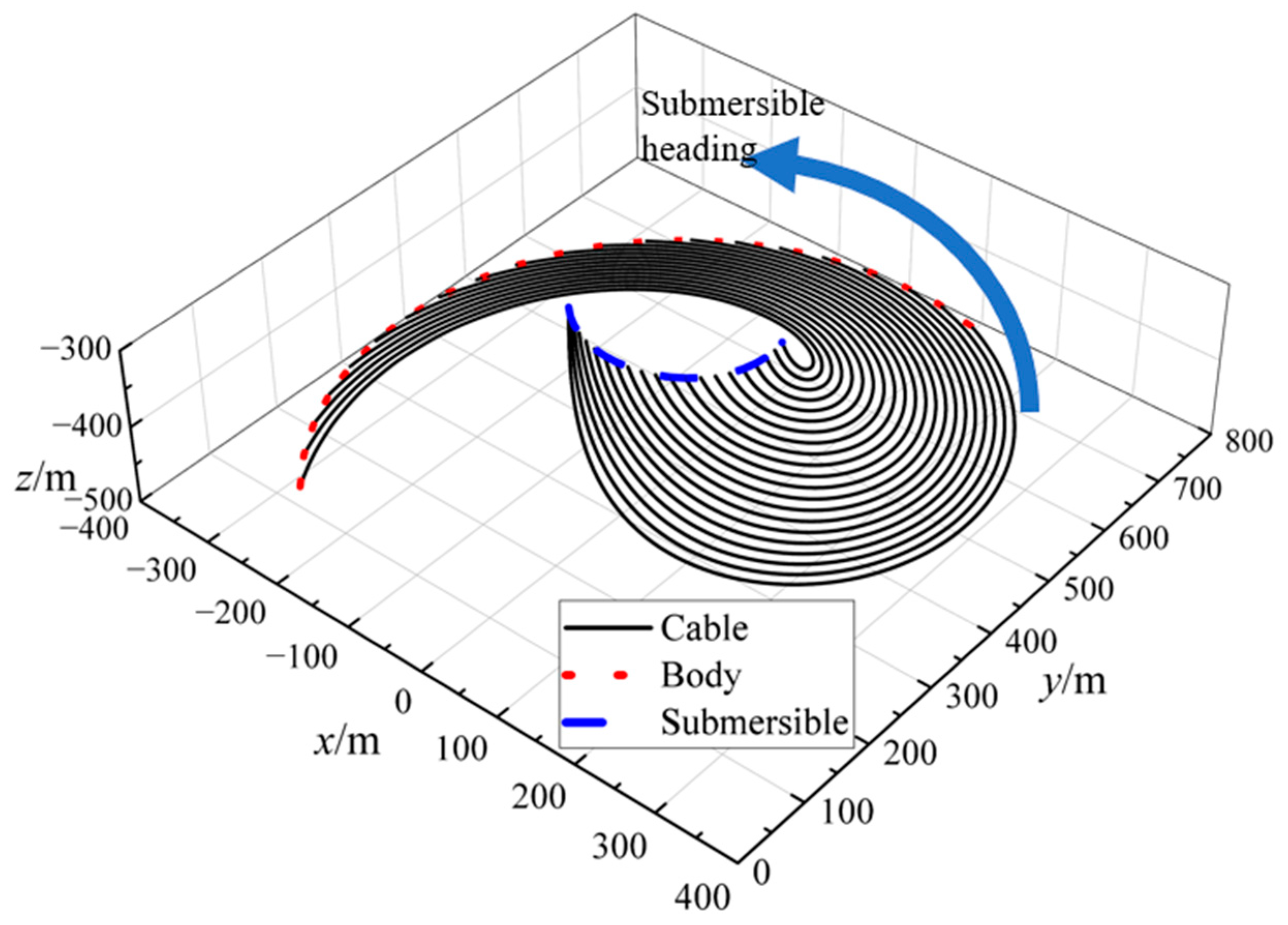
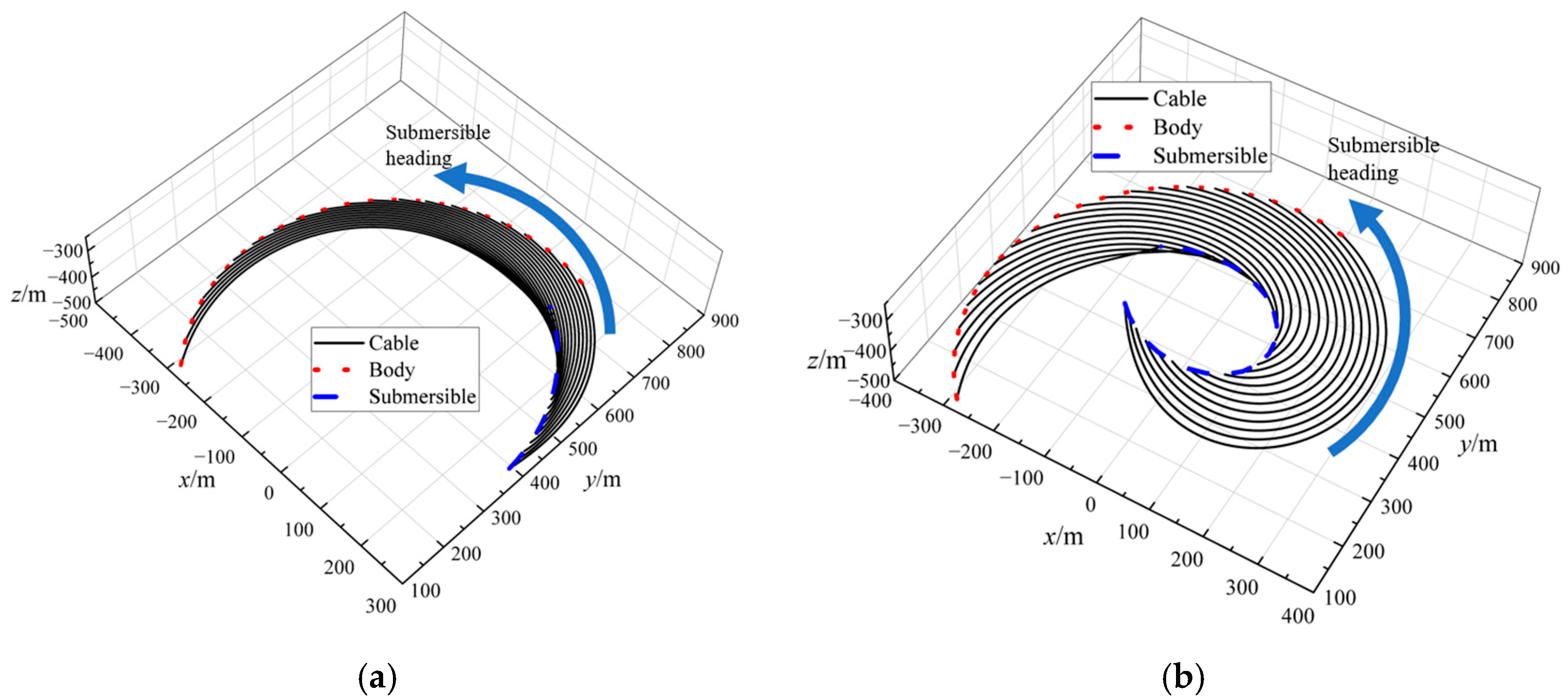
4.2.2. Circular Rotational Motion
5. Conclusions
- (1)
- At the end of the retraction maneuver and the deployment maneuver, rapid and substantial fluctuations in tension occur at the point where the towed cable connects to the submersible.
- (2)
- When performing retraction maneuvers or deployment maneuvers during submersible acceleration, the simultaneous end of submersible acceleration and towed cable length change is avoided by selecting a suitable rate of cable length change. This can effectively reduce the maximum tension of the towed cable. During the deployment maneuver, as the length of the towed cable rises, the speed of the cable change also increases from 0.8 m/s to 1.2 m/s. This results in an initial increase and subsequent minor drop in the maximum tension of the towed cable. The maximum tension value occurs at a speed of 1.0 m/s. This is because the acceleration of the submersible ends at the same time as the cable length change at the towed cable length change speed of 1.0 m/s.
- (3)
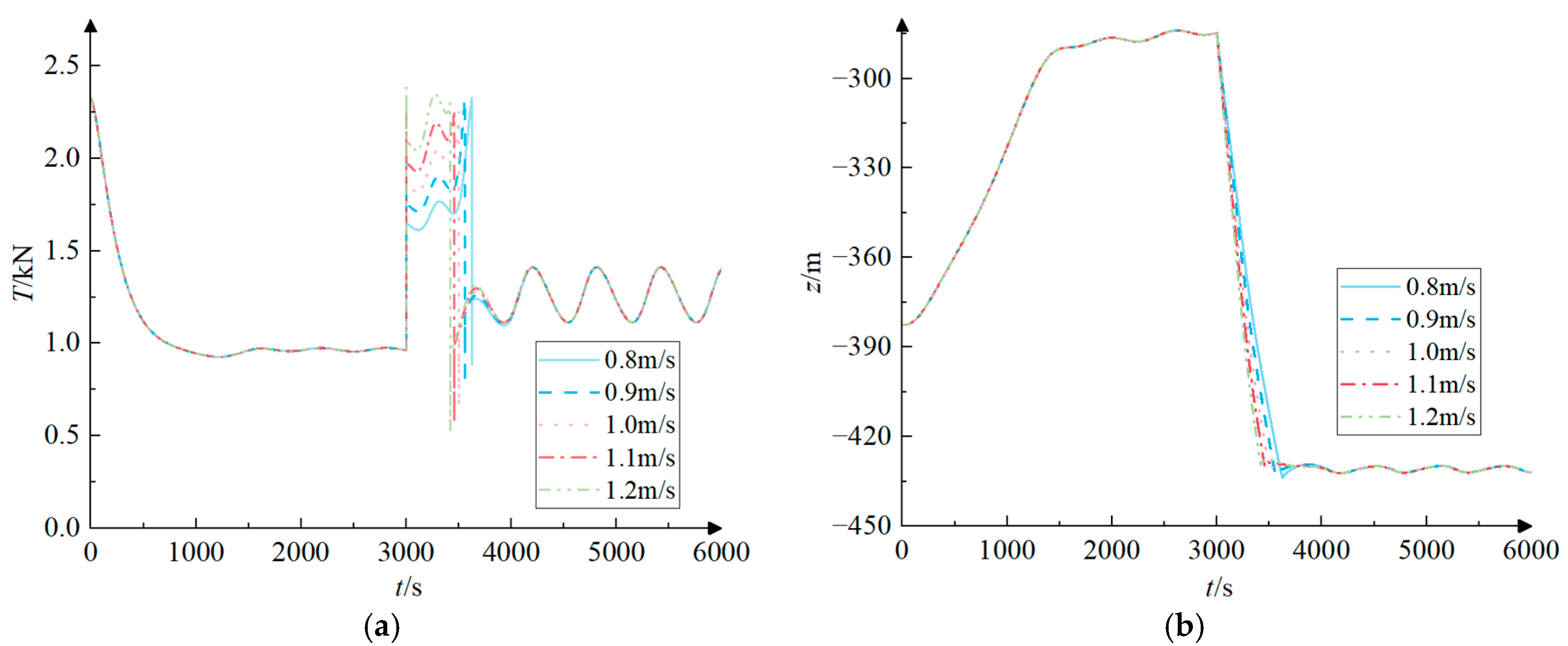
- When the cable deployment maneuver was performed during the circular rotational motion, the range of tension variation was reduced from 0.30 kN before the deployment to 0.02 kN after the deployment. The stability of the towed cable tension at the end of the deployment was significantly enhanced. During the cable deployment process, the faster the cable length change speed, the larger the towed body depth change amount. An increase in towed cable length increases the total mass and inertia of the system. Increased inertia of the system results in less sensitivity to external forces, leading to a reduction in the magnitude of tension variations. At the same time, a longer towed cable has a larger surface area in contact with the water column, the damping effect of the fluid is more significant, and the tension will gradually decay as it propagates. This is because energy is absorbed and dispersed during propagation, thus reducing tension fluctuations.
- (4)
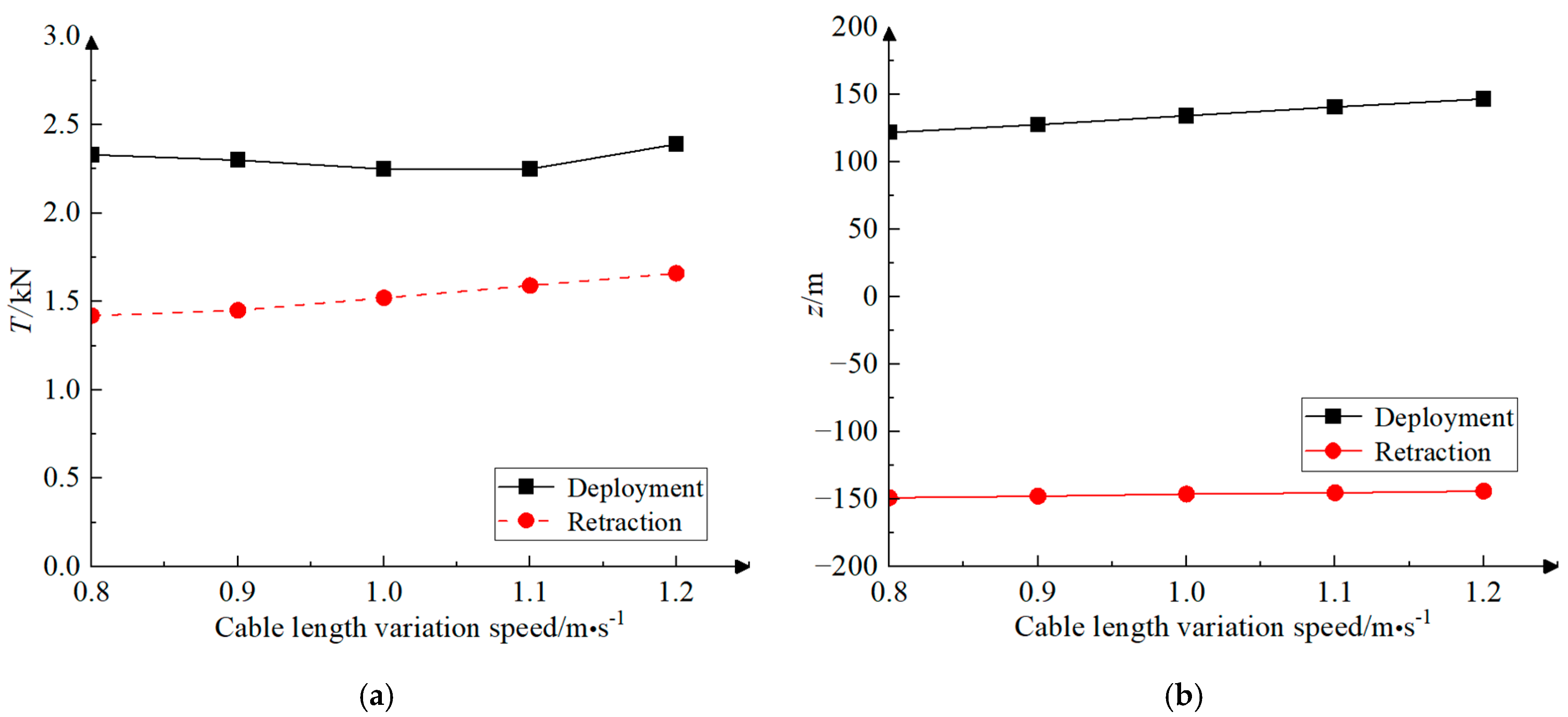
- The maximum tension of the towed cable in the circular rotational motion occurs at the rate of change of the cable length of 1.2 m/s at different rates of change of the cable length, and the maximum tension values of the retraction and deployment of the cable are 1.66 kN and 2.39 kN. While the maximum tension is reached when the rate of change of cable length is at its maximum, the rise in maximum tension does not directly correspond to the increase in the rate of change of cable length. This is due to the fact that the variation of the towed cable tension during the submersible circular rotational motion shows an obvious long periodicity and the time of the maximum tension appearing at different rates of cable length change is not consistent. The maximum tension can be greatly diminished if the alteration in cable length concludes at the minimum point of the tension fluctuation cycle.
- (5)
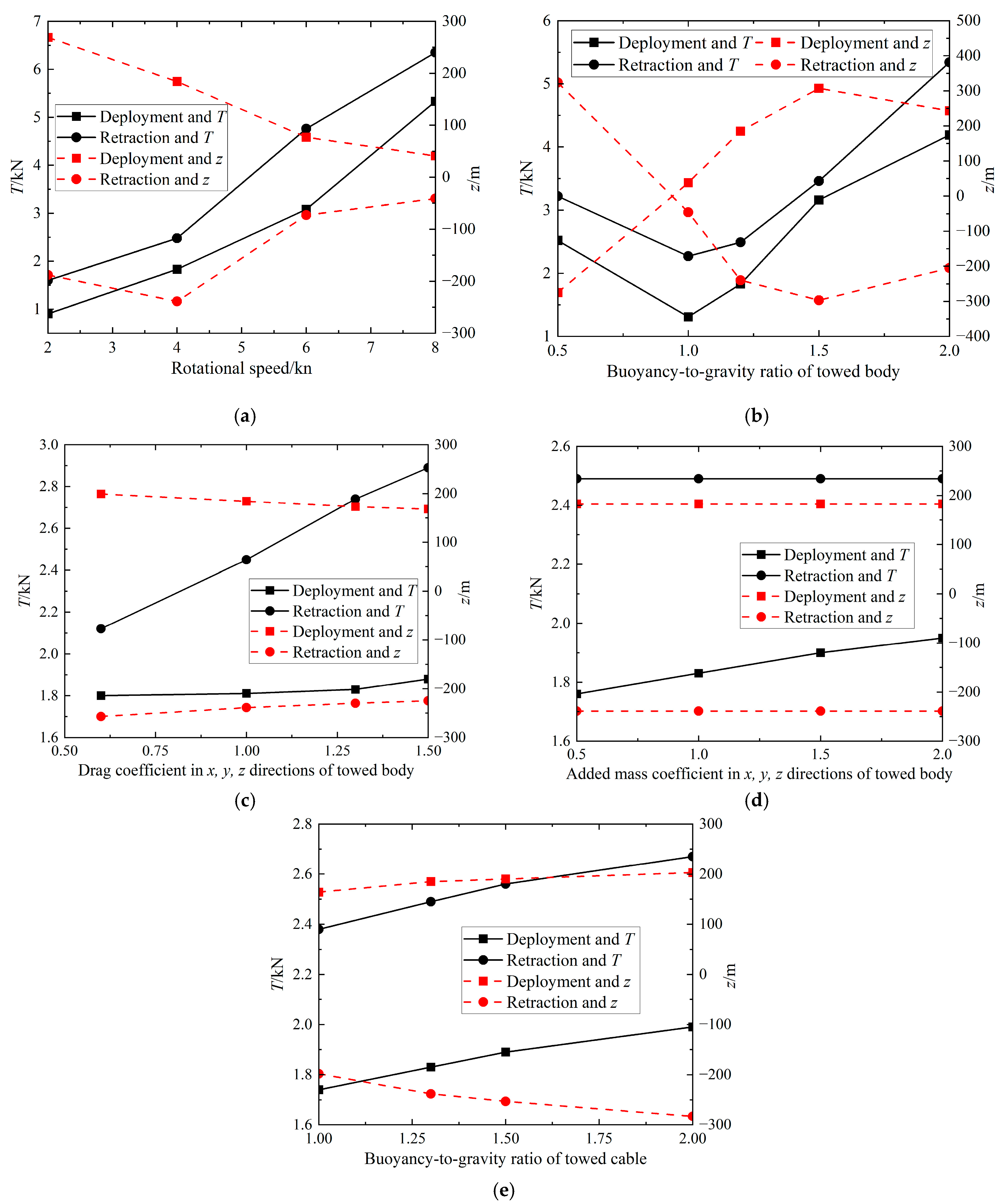
- This paper considers the effects of various motion parameters and structural parameters on the motion response of composite maneuvering motion. Specifically, the buoyancy-to-gravity ratio of the towed body, the drag coefficient of the towed body, the added mass coefficient of the towed body, the buoyancy-to-gravity ratio of the towed cable, the acceleration time of the acceleration motion, and the rotational speed of the circular rotational motion are taken into account. Parameters such as the buoyancy-to-gravity ratio of the towed body, the acceleration time of the acceleration motion, and the rotational speed of the circular rotational motion have a notable impact on the motion response.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Grosenbaugh, M.; Bowen, A. A Case for Active Control of Underwater Vehicles Towed by Very Long Marine Cables. In Proceedings of the ISOPE International Ocean and Polar Engineering Conference, Seoul, Republic of Korea, 19–24 June 2005. ISOPE-I-05-166. [Google Scholar]
- Walker, K.L.; Giorgio-Serchi, F. Disturbance Preview for Non-Linear Model Predictive Trajectory Tracking of Underwater Vehicles in Wave Dominated Environments. In Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Detroit, MI, USA, 1–5 October 2023; pp. 6169–6176. [Google Scholar]
- Vaz, M.A.; Patel, M.H. Transient behaviour of towed marine cables in two dimensions. Appl. Ocean Res. 1995, 17, 143–153. [Google Scholar] [CrossRef]
- Wang, Z. Towed Cable System Vibration Responses to Varying Towed Velocity. Nav. Archit. Ocean Eng. 2019, 35, 1–7. [Google Scholar] [CrossRef]
- Grosenbaugh, M.A. Dynamic Behavior of Towed Cable Systems During Ship Turning Maneuvers. Ocean Eng. 2007, 34, 1532–1542. [Google Scholar] [CrossRef]
- Zhang, D.; Bai, Y.; Zhu, K. Dynamic analysis for towed cable under two different modes. J. Ship Mech. 2018, 22, 967–976. [Google Scholar] [CrossRef]
- Ablow, C.M.; Schechter, S. Numerical simulation of undersea cable dynamics. Ocean Eng. 1983, 10, 443–457. [Google Scholar] [CrossRef]
- Liu, L.; Zhang, Y.; Cha, Z. Math-model of Three-dimensional Dragging with Changing Velocity. Ship Eng. 2003, 25, 25–27. [Google Scholar] [CrossRef]
- Gong, L.; Wang, W.; Li, S. Investigations on Linear Manoeuvres of Underwater Towed Cable in Current. J. Phys. Conf. Ser. 2020, 1549, 420–433. [Google Scholar] [CrossRef]
- Zhao, Y.; Li, G.; Lian, L. Numerical model of towed cable body system validation from sea trial experimental data. Ocean Eng. 2021, 226, 108859. [Google Scholar] [CrossRef]
- Chapman, D.A. Towed cable behaviour during ship turning manoeuvers. Ocean Eng. 1984, 11, 327–361. [Google Scholar] [CrossRef]
- Wang, Z.; Sun, G. Parameters influence on maneuvered towed cable system dynamics. Appl. Ocean Res. 2015, 49, 27–41. [Google Scholar] [CrossRef]
- Kishore, S.S.; Ganapathy, C. Analytical investigations on loop-manoeuvre of underwater towed cable-array system. Appl. Ocean Res. 1996, 18, 353–360. [Google Scholar] [CrossRef]
- Wang, H.; Wang, Q. Study on dynamic model of underwater towed heave compensation system. Ocean Eng. 2008, 26, 77–83. [Google Scholar] [CrossRef]
- Lu, Z.; Zhu, K. Dynamic Simulation of System of Ocean Changeable Cable in Three Dimensions. J. Jiangsu Univ. Sci. Technol. (Nat. Sci. Ed.) 2003, 17, 6–11. [Google Scholar] [CrossRef]
- Yu, S.; Li, Y.; Zhang, Y. Forecast of a floating detector’ s towing state. Ocean Eng. 2015, 3, 45–50. [Google Scholar] [CrossRef]
- Pang, S.-K.; Liu, J.-Y.; Chen, H.; Wang, J.; Yi, H. Analysis of motion state of the tow-part underwater towed vehicle system during cable deployment. In Proceedings of the OCEANS 2017—Aberdeen, Aberdeen, UK, 19–22 June 2017; pp. 1–5. [Google Scholar] [CrossRef]
- González, F.; de la Prada, A.; Luaces, A. Real-time simulation of cable pay-out and reel-in with towed fishing gears. Ocean Eng. 2017, 131, 295–307. [Google Scholar] [CrossRef]
- Quan, W.; Chang, Q.; Zhang, Q. Dynamics calculation for variable-length underwater cable with geometrically nonlinear motion. Ocean Eng. 2020, 212, 107–126. [Google Scholar] [CrossRef]
- Zhang, D.; Zhao, B.; Zhu, K. Dynamic analysis of towed cable with variable length during turning maneuvers. Sci. Rep. 2023, 13, 352–362. [Google Scholar] [CrossRef] [PubMed]
- Walton, T.S.; Polachek, H. Calculation of transient motion of submerged cables. Math. Comput. 1960, 14, 27–46. [Google Scholar] [CrossRef]
- Kato, N.; Koda, S.; Takahashi, T. Motions of underwater towed system. Int. Offshore Mech. Arct. Eng. 1986, 5, 426–433. [Google Scholar]
- Toshio, N.; Motora, S.; Fujino, M. On the dynamic analysis of multi-component mooring lines. In Proceedings of the Offshore Technology Conference OTC, Houston, TX, USA, 4 May 1982. [Google Scholar]
- Huang, S. Dynamic analysis of three-dimensional marine cable. Ocean Eng. 1994, 21, 587–605. [Google Scholar] [CrossRef]
- Chai, Y.T.; Varyani, K.S.; Barltrop, N.D.P. Three-dimensional Lump-Mass formulation of a catenary riser with bending, torsion and irregular seabed interaction effect. Ocean Eng. 2002, 29, 1503–1525. [Google Scholar] [CrossRef]
- Wang, F.; Huang, G.; Deng, D. Dynamic response analysis of towed cable during deployment/retrieval. J. Shanghai Jiaotong Univ. (Sci.) 2008, 13, 245–251. [Google Scholar] [CrossRef]
- Wang, F.; Tu, W.; Deng, D. Motion Modeling and Numerical Simulation Study of Underwater Multi-Cable Multi-Body Towed System. J. Shanghai Jiaotong Univ. 2020, 54, 441–450. [Google Scholar] [CrossRef]
- Wang, Z. Simulation for random vibration transfer and isolation of a multi-segment towed system. J. Vib. Shock 2019, 38, 259–264. [Google Scholar] [CrossRef]
- Wang, Z. Dynamics and Design of Ocean Towing Systems; National Defense Industry Press: Beijing, China, 2019; pp. 8–16. [Google Scholar]
- Dong, R.G. Effective Mass and Damping of Submerged Structures; Lawrence Livermore National Lab: Livermore, CA, USA, 1978; pp. 40–47. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Structural Parameters | Parameter Value |
|---|---|
| Initial cable length/m | 1000 |
| Cable diameter/m | 0.0165 |
| m−1 | 0.1711 |
| Tangential drag coefficient of towed cable | 0.0080 |
| Normal drag coefficient of towed cable | 1.5000 |
| Towed mass/kg | 390 |
| Displacement volume of towed body/m3 | 0.4254 |
| Drag coefficient in x, y, z directions of towed body | 1.0000 |
| Added mass coefficient in x, y, z directions of towed body | 1.0000 |
| Cable Retraction and Deployment | No Cable Retraction and Deployment | |
|---|---|---|
| Acceleratedmotion | Composite maneuvering motions | Simple maneuvering motion |
| Circular rotational motion | Composite maneuvering motions | Simple maneuvering motion |
| Motion and Structural Parameters | Ranges of Values |
|---|---|
| Acceleration time/s | 300, 400, 500, 600 |
| Buoyancy-to-gravity ratio of towed body | 0.5, 1.0, 1.2, 1.5, 2.0 |
| Drag coefficient in x, y, z directions of towed body | 0.6, 1.0, 1.3, 1.5 |
| Added mass coefficient in x, y, z directions of towed body | 0.5, 1.0, 1.5, 2.0 |
| Buoyancy-to-gravity ratio of towed cable | 1.0, 1.3, 1.5, 2.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Kong, P. Motion Response of the Submersible Underwater Towed System as Cable Length Changes. Appl. Sci. 2024, 14, 6503. https://doi.org/10.3390/app14156503
Wang Z, Kong P. Motion Response of the Submersible Underwater Towed System as Cable Length Changes. Applied Sciences. 2024; 14(15):6503. https://doi.org/10.3390/app14156503
Chicago/Turabian StyleWang, Zhibo, and Peiyun Kong. 2024. "Motion Response of the Submersible Underwater Towed System as Cable Length Changes" Applied Sciences 14, no. 15: 6503. https://doi.org/10.3390/app14156503
APA StyleWang, Z., & Kong, P. (2024). Motion Response of the Submersible Underwater Towed System as Cable Length Changes. Applied Sciences, 14(15), 6503. https://doi.org/10.3390/app14156503