
Tropospheric Delay Model Based on VMF and ERA5 Reanalysis Data



Abstract
1. Introduction
2. Data Analysis
2.1. VMF Tropospheric Zenith Delay Product
2.2. IGS Global Troposphere Products
2.3. ERA5 Layered Meteorological Data
3. Basic Principle of Calculating Tropospheric Zenith Delay
3.1. VMF Calculation of Tropospheric Delay
3.1.1. Tropospheric Delay Elevation Correction
3.1.2. Tropospheric Delay Grid Plane Interpolation Scheme
3.2. The Principle of ERA5 Data Set Calculation to the Path Layer Delay
3.3. Model Accuracy Test
4. Acquisition and Analysis of VMF Experimental Data
4.1. Source of Experimental Data
4.2. Experimental Scheme
4.3. Conclusion Analysis
5. Building ZTD Height Change Grid Model Based on ERA5
5.1. Selection of Fitting Model for ZTD Variation with Height
5.2. Least Square Exponential Fitting
5.3. Model Accuracy Verification
6. Correct VMF Interpolation Model Based on Height Change Grid Model
6.1. Elevation Reduction of Grid Model Based on ERA5 Height Change
6.2. Design and Analysis of Experimental Scheme
7. Conclusions
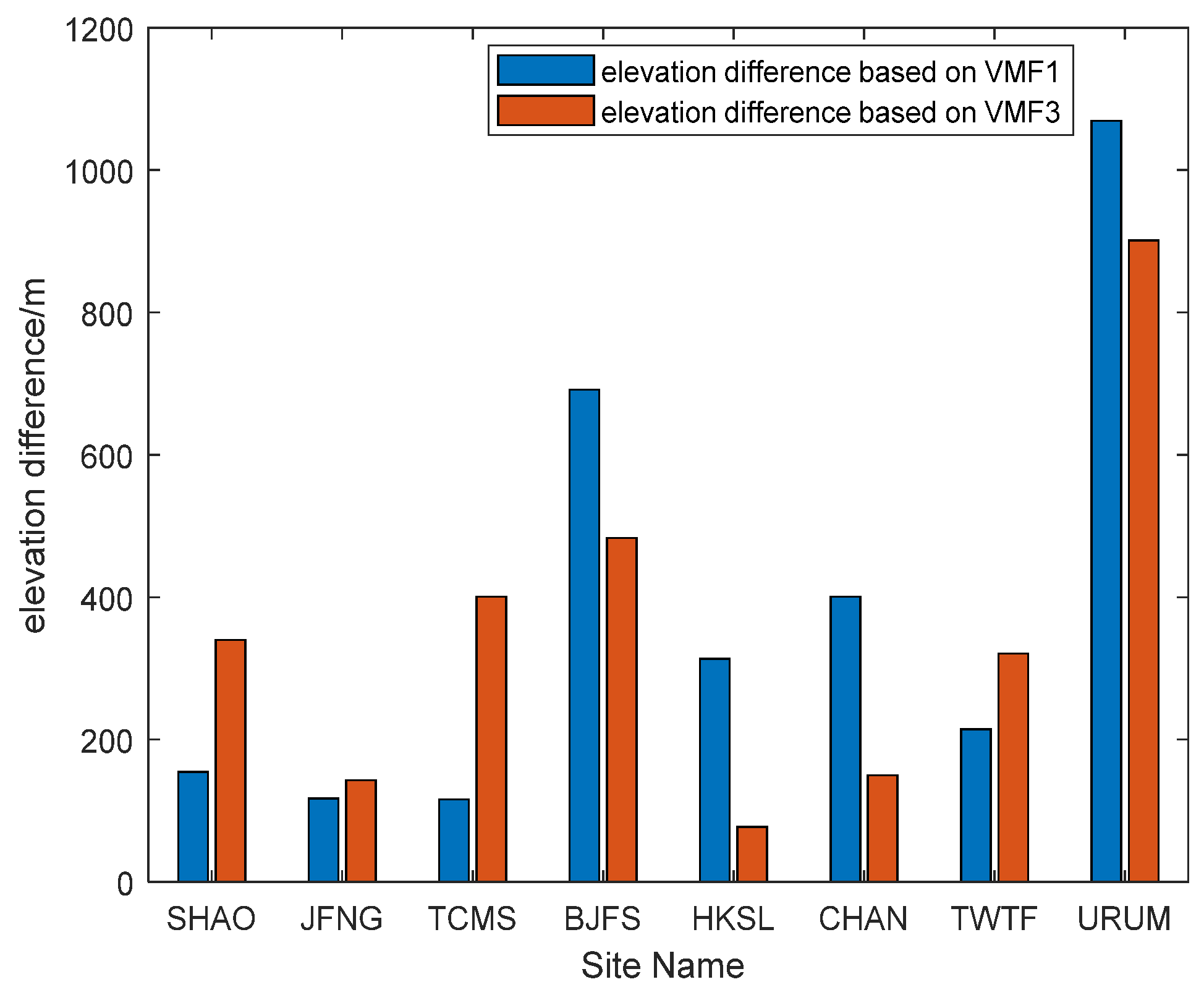
- (1)
- Using the VMF grid model to interpolate the tropospheric delay, and using the function of the troposphere delay changing with the elevation to correct the tropospheric delay will produce a large error. The greater the elevation difference, the greater the error. The elevation difference between the URUM station and its surrounding grid points is the largest (about 1000 m), and the resulting tropospheric delay error is also the largest (about 100 mm).
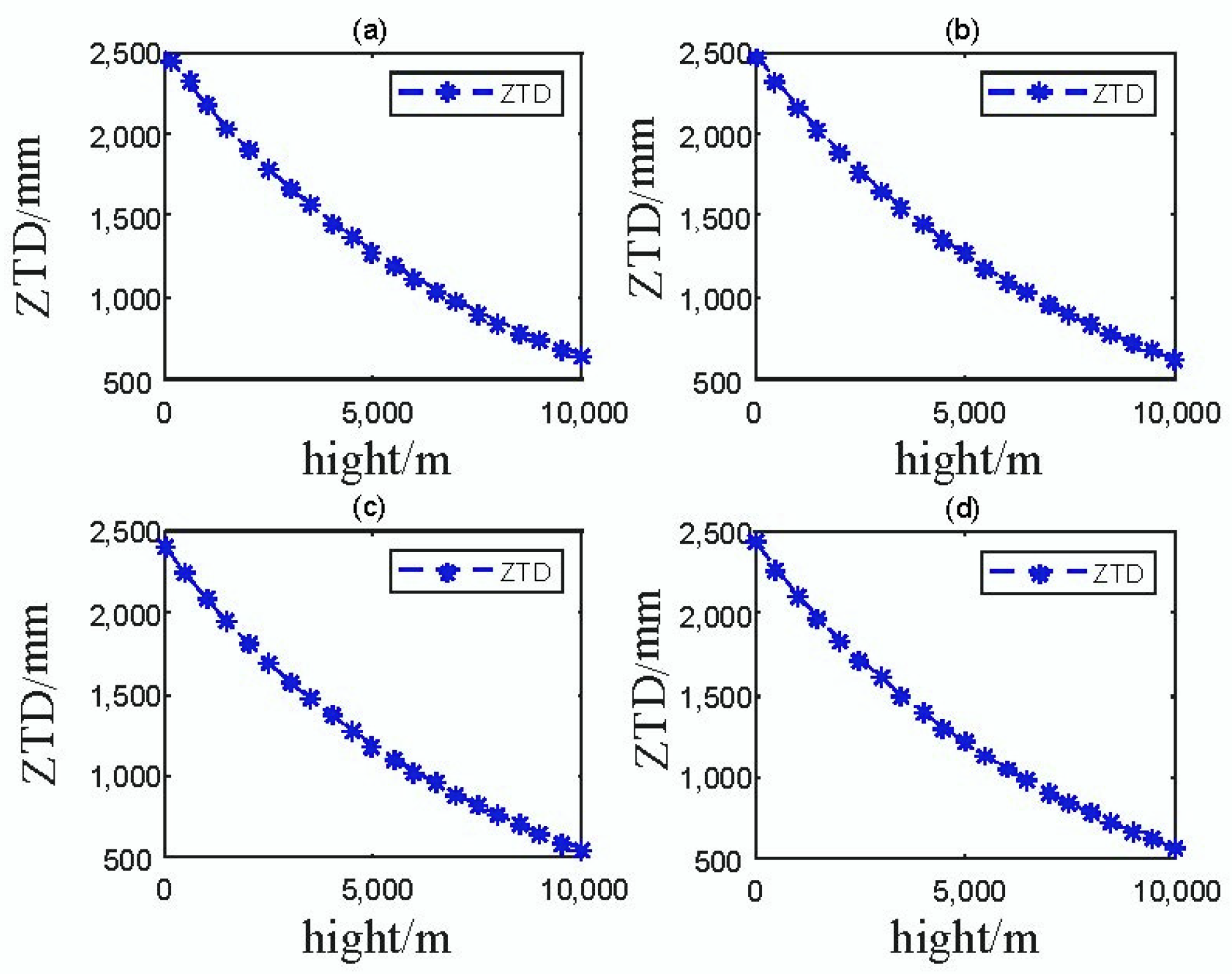
- (2)
- The tropospheric delay is obtained using ERA5 reanalysis data integration. According to the analysis, the ZTD below 10 km in China clearly shows an exponentially decreasing form with the altitude change.
- (3)
- The least squares exponential fitting method is used to establish a ZTD height change grid model in China, and the ERA5 integration is used to obtain ZTD delay to verify the accuracy of the model. The root mean square error is less than 12 mm. The fitting accuracy is related to the latitude. The higher the latitude, the higher the fitting accuracy. The reason for the lower fitting accuracy at low latitudes is that the air at low latitudes contains more water vapor and the climate is relatively wetter, making it difficult to estimate ZWD accurately.
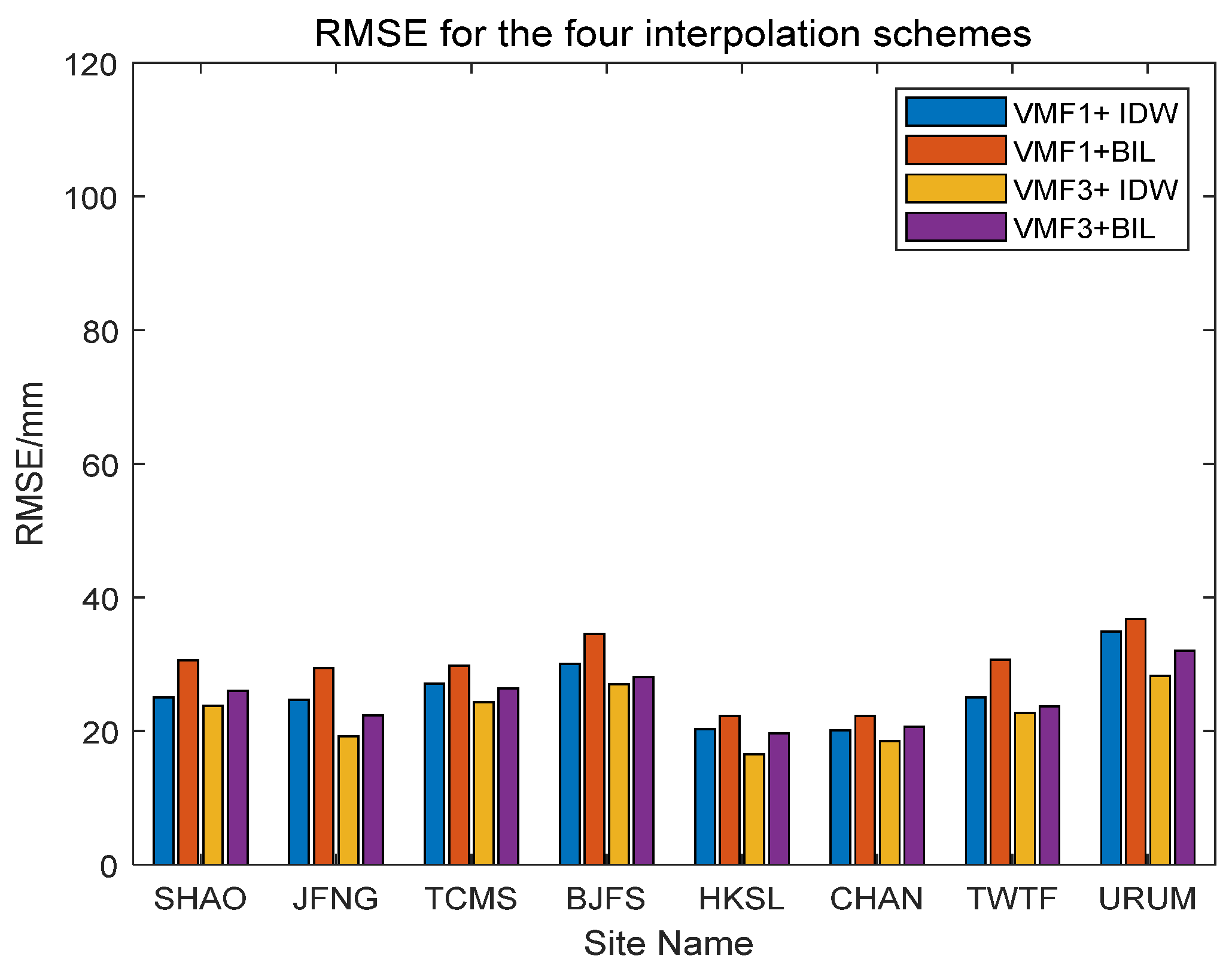
- (4)
- Through experimental analysis, using the ZTD height change grid model as the ZTD height reduction method can effectively reduce the error caused by the tropospheric delay of VMF interpolation when the height difference is large. The VMF interpolation accuracy improvement at URAM is the largest, with an improvement of 63.5 mm in root mean square error.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Qiang, M.Q.; Guan, Q.L.; Wang, Y.X.; Sun, P.; Qiu, W.W.; Fan, C.M. Influence of tropospheric zenith delay correction model on precision single-point positioning. J. Minjiang Coll. 2020, 43, 110–117. [Google Scholar]
- Xu, T.H.; Li, S.; Wang, S.M.; Jiang, N. Optimization model of regional tropospheric delay RBF neural network for China considering meteorological data. J. Surv. Mapp. 2022, 51, 1690–1707. [Google Scholar]
- Yang, L.; Li, B.F.; Lou, L.Z. Influence of different tropospheric models on GPS positioning results. Mapp. Bull. 2009, 4, 9–11+64. [Google Scholar]
- Boehm, J.; Niell, A.; Tregoning, P.; Schuh, H. Global Mapping Function (GMF): A new empirical mapping function based on numerical weather model data. Geophys. Res. Lett. 2006, 33, L07304. [Google Scholar] [CrossRef]
- Boehm, J.; Werl, B.; Schuh, H. Troposphere mapping functions for GPS and very long baseline interferometry from European Centre for Medium-Range Weather Forecasts operational analysis data. J. Geophys. Res. Solid Earth 2006, 111, B02406. [Google Scholar] [CrossRef]
- Urquhart, L.; Santos, M.C.; Nievinski, F.G.; Böhm, J. Generation and Assessment of VMF1-Type Grids Using North-American Numerical Weather Models. Int. Assoc. Geod. Symp. 2014, 139, 3–9. [Google Scholar]
- Dai, L.W. Augmentation of GPS with GLONASS and Pseudolite Signals for Carrier Phase Based Kinematic Positioning. Ph.D. Thesis, University of New South Wales, Sydney, NSW, Australia, 2022. [Google Scholar]
- Luo, H.P.; Wang, Z.M. The Analysis of Tropospheric Delay Model for GPS Net RTK. Eng. Surv. Mapp. 2011, 20, 70–73. [Google Scholar]
- Zhang, X.H.; Zhu, F.; Li, P. Zenith Troposphere Delay Interpolation Model for Regional CORS Network Augmented PPP. Geomat. Inf. Sci. Wuhan Univ. 2013, 38, 679–683. [Google Scholar]
- Zheng, Y.; Feng, Y.M. Interpolating Residual Zenith Tropospheric Delays for Improved Regional Area Differential GPS Positioning. In Proceedings of the ION GPS-2005, Long Beach, CA, USA, 13–16 September 2005. [Google Scholar]
- Kouba, J. Implementation and testing of the gridded Vienna Mapping Function 1 (VMF1). J. Geod. 2008, 82, 193–205. [Google Scholar] [CrossRef]
- Landskron, D.; Böhm, J. VMF3/GPT3: Refined discrete and empirical troposphere mapping functions. J. Geod. 2018, 92, 349–360. [Google Scholar] [CrossRef]
- Li, B.F. Theory and methods of parameter estimation for mixed integer GNSS function models and stochastic models. J. Surv. Mapp. 2010, 39, 330. [Google Scholar]
- Fu, F.E. Geometric model-based inertia-assisted PPP circumferential jump repair with fast reconvergence. GNSS World China 2017, 42, 7. [Google Scholar]
- Dogan, A.H.; Erdogan, B. A new empirical troposphere model using ERA5’s monthly averaged hourly dataset. J. Atmos. Sol. Terr. Phys. 2022, 232, 105865. [Google Scholar] [CrossRef]
- Zhao, J.Y.; Song, S.L.; Zhu, W.Y. Accuracy assessment of ERA-Interim applied to ground-based GPS/PWV calculations in China. J. Wuhan Univ. Inf. Sci. Ed. 2014, 39, 935–939. [Google Scholar]
- Meng, X.G.; Guo, J.J.; Han, Y.Q. Preliminary assessment of the applicability of ERA5 reanalysis data. J. Mar. Meteorol. 2018, 38, 9. [Google Scholar]
- Chen, M.; Chen, J.P.; Hu, C.W. Meteorological numerical models applied to GNSS precision single-point positioning. In Proceedings of the China Satellite Navigation Academic Conference, Academic Exchange Center of China Satellite Navigation System Management Office, Changsha, China, 18–20 May 2016. [Google Scholar]
- Zhao, J.G.; Song, S.l.; Chen, Q.M. Establishment of a global tropospheric zenith delay model based on the vertical profile functional formula. J. Geophys. 2014, 57, 3140–3153. [Google Scholar]
- Chen, Q.; Song, S.; Heise, S.; Liou, Y.A.; Zhu, W.; Zhao, J. Assessment of ZTD derived from ECMWF/NCEP data with GPS ZTD over China. GPS Solut. 2011, 15, 415–425. [Google Scholar] [CrossRef]
- Ma, Z.Q.; Chen, Q.M.; Gao, D.Z. Accuracy analysis of calculating ZTD and ZWD with ERA-Interim in analysis data in China region. Geod. Geodyn. 2012, 32, 100–104. [Google Scholar]
- Mao, J.; Zhu, C.Q.; Guo, J.F. A new global tropospheric zenith delay model. J. Wuhan Univ. Inf. Sci. Ed. 2013, 38, 684–688. [Google Scholar]
- Huang, L. A global grid model for the correction of the vertical zenith total delay based on a sliding window algorithm. GPS Solut. 2021, 25, 98. [Google Scholar] [CrossRef]
- Qiu, L.; Luo, H.P.; Wang, Z. Analysis of tropospheric interpolation correction for GPS network RTK mobile stations. Surv. Mapp. Eng. 2011, 20, 70–73. [Google Scholar]
- Shi, X.L. Extrapolation of tropospheric delayed wet component using IGS products. Beijing Surv. Mapp. 2009, 3, 6–9. [Google Scholar]
- Liu, C.D.; Huang, L.K.; Liu, L. Accuracy analysis of ERA5 and MERRA-2 atmospheric precipitable water in Xinjiang region. J. Guilin Univ. Technol. 2022, 2, 1–9. [Google Scholar]
- Mo, Z.X.; Huang, L.; Guo, X. Accuracy analysis of GNSS water vapor inversion in Guilin region using ERA5 data. J. Nanjing Univ. Inf. Eng. Nat. Sci. Ed. 2021, 13, 131–137. [Google Scholar]
- Huang, J.F.; Lou, Y.D.; Zhang, S.W. Reanalysis of data to calculate the accuracy of regional tropospheric delay in China. Surv. Mapp. Sci. 2018, 43, 13–17. [Google Scholar]
- Liu, J.T.; Liu, S.T.; Ye, Z.Z.; Gao, Z.Y. A regional precision zenith tropospheric delay combination forecast model. Geod. Geodyn. 2022, 42, 951–956. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Station Name | Longitude/(°) | Latitude/(°) | Height/m |
|---|---|---|---|
| SHAO | 121.20 | 31.10 | 22.11 |
| JFNG | 114.49 | 30.51 | 71.30 |
| TCMS | 120.99 | 24.80 | 77.30 |
| BJFS | 115.89 | 39.61 | 87.40 |
| HKSL | 113.93 | 22.37 | 95.26 |
| CHAN | 125.44 | 43.79 | 268.30 |
| TWTF | 121.16 | 24.95 | 203.10 |
| URUM | 87.6 | 43.81 | 749.54 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, M.; Wang, M.; Guo, H.; Hu, J.; Xiong, J. Tropospheric Delay Model Based on VMF and ERA5 Reanalysis Data. Appl. Sci. 2023, 13, 5789. https://doi.org/10.3390/app13095789
Zhang M, Wang M, Guo H, Hu J, Xiong J. Tropospheric Delay Model Based on VMF and ERA5 Reanalysis Data. Applied Sciences. 2023; 13(9):5789. https://doi.org/10.3390/app13095789
Chicago/Turabian StyleZhang, Mengtao, Mengli Wang, Hang Guo, Junjun Hu, and Jian Xiong. 2023. "Tropospheric Delay Model Based on VMF and ERA5 Reanalysis Data" Applied Sciences 13, no. 9: 5789. https://doi.org/10.3390/app13095789
APA StyleZhang, M., Wang, M., Guo, H., Hu, J., & Xiong, J. (2023). Tropospheric Delay Model Based on VMF and ERA5 Reanalysis Data. Applied Sciences, 13(9), 5789. https://doi.org/10.3390/app13095789