
A Real-Time Traffic Sign Recognition Method Using a New Attention-Based Deep Convolutional Neural Network for Smart Vehicles


Abstract
1. Introduction
2. Related Works
2.1. TSR Process
2.1.1. Image Acquisition
2.1.2. Preprocessing
- Image cropping involves selecting a region of interest (ROI) that contains only the traffic sign and removing any background information. This can help reduce the amount of irrelevant data that the machine learning model needs to process, leading to faster and more accurate classification;
- Resizing images to a fixed size can help standardise the input data, which is important for some machine learning algorithms that require consistent input dimensions. It can also reduce the computational load and improve the speed of the system;
- Image normalisation involves scaling the pixel values to a common range, such as [0, 1] or [−1, 1]. This can help improve the accuracy of the system by reducing the impact of lighting variations and enhancing the contrast of the image;
- Image smoothing techniques like Gaussian blur can help reduce noise in the image and make the edges of the traffic sign more distinct. This can help improve the accuracy of edge detection algorithms and enhance the features that are relevant to classification;
- A colour space conversion such as HSV or YUV can help separate the colour information from the luminance information. This can help improve the accuracy of colour-based segmentation and enhance the relevant features for classification.
2.1.3. Traffic Sign Detection (TSD) Module
2.1.4. Traffic Sign Classification (TSC) Module
2.1.5. Result
2.2. Science Gaps in Existing TSR Systems
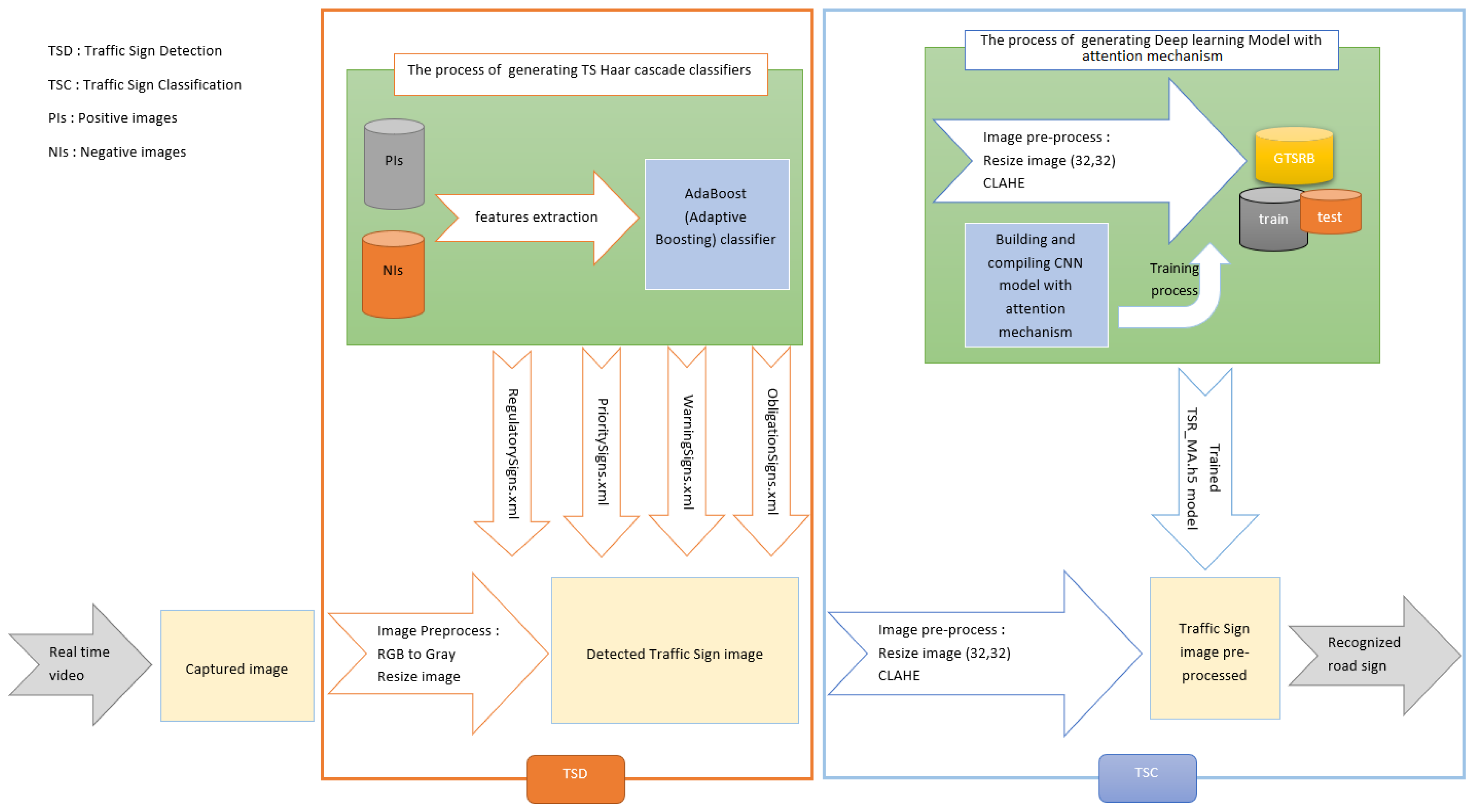
3. Proposed TSR Methodology
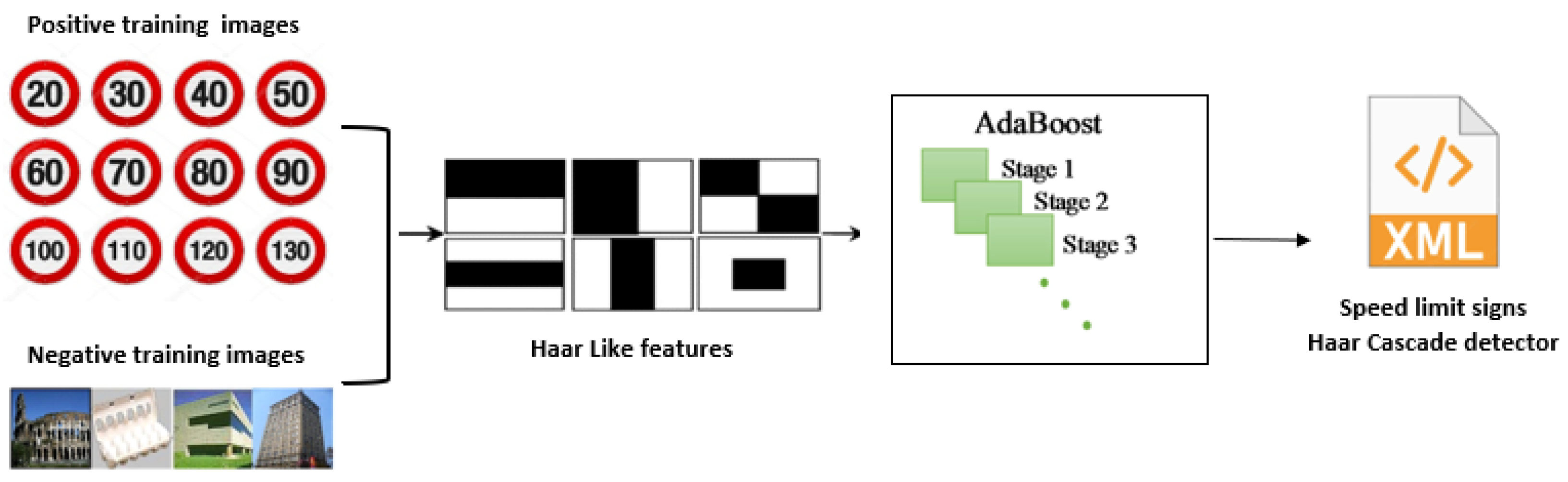
- Step 1: prepare Haar-like cascade detectors;
- Step 2: develop a deep neural network based on CNNs using attention mechanisms;
- Step 3: train and test the CNN model on the GTSRB dataset;
- Step 4: save the trained model;
- Step 5: capture and preprocess the image from the video camera;
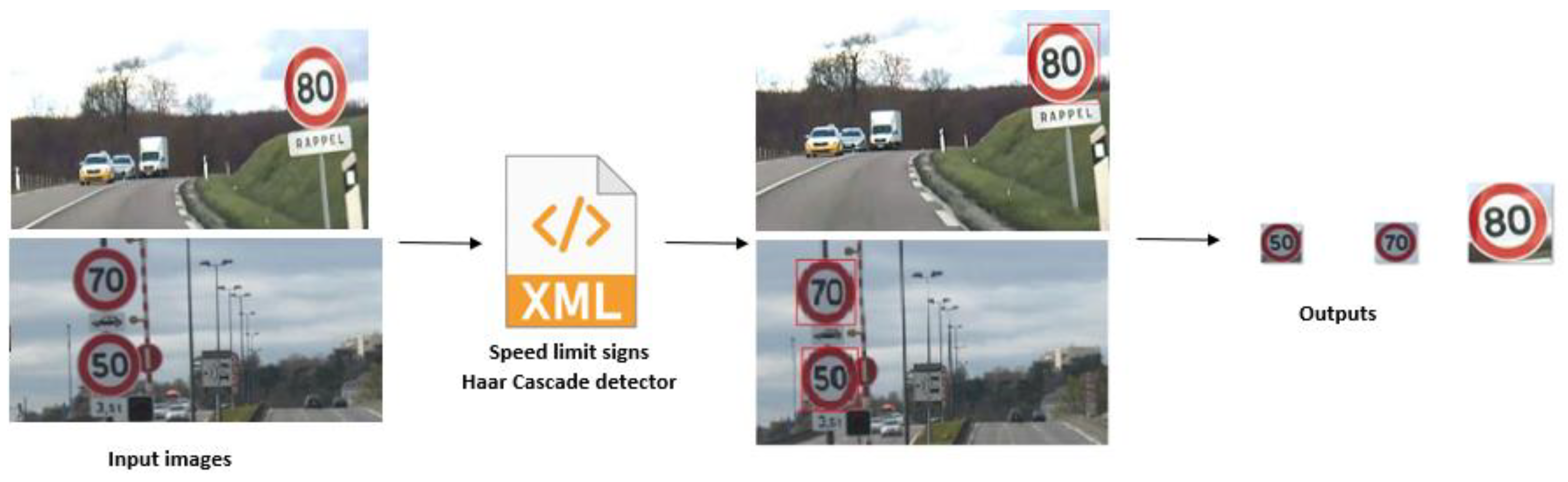
- Step 6: extract the ROI from the captured image using the Haar-like cascade-trained detector;
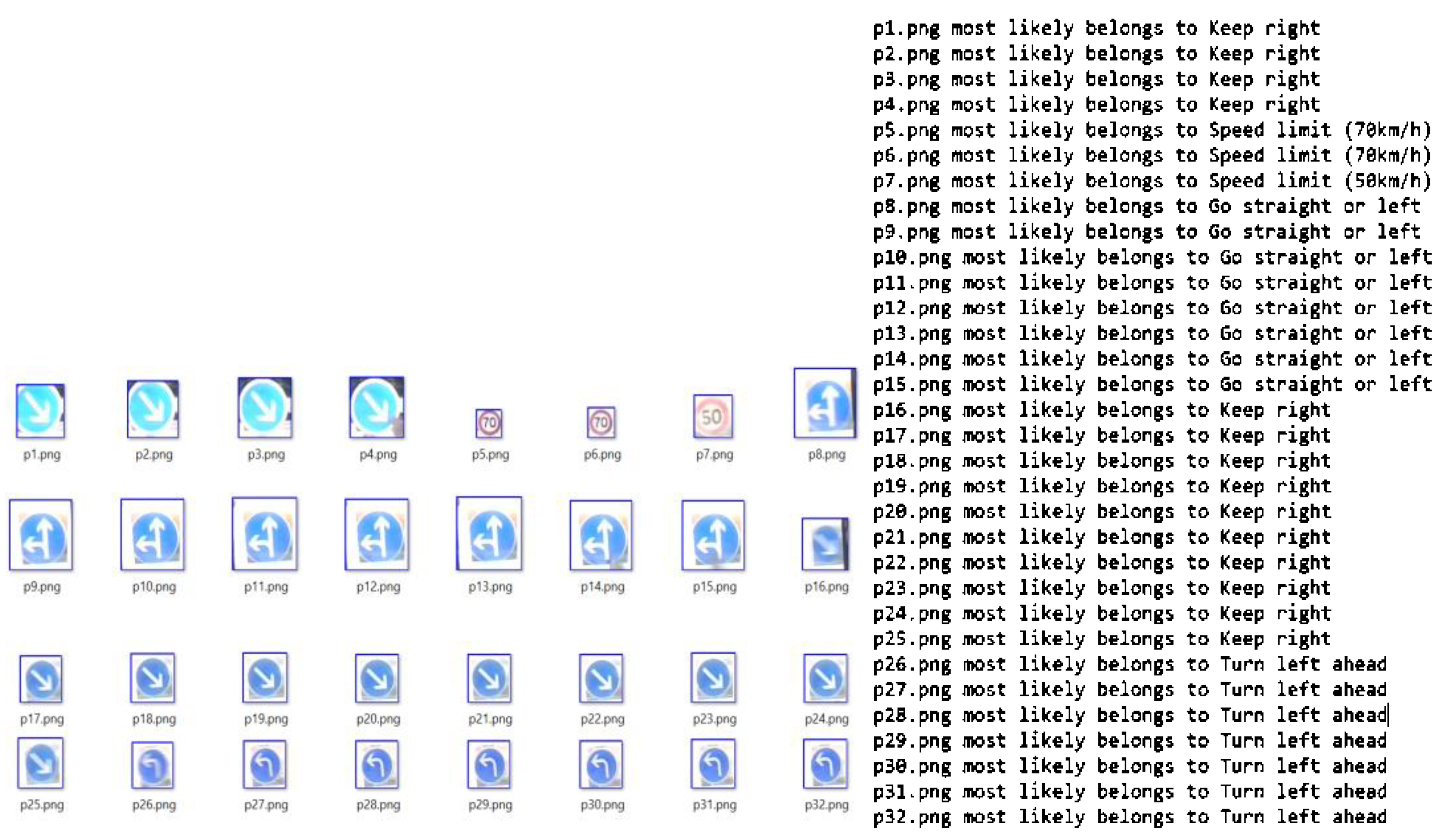
- Step 7: prediction of the detected road sign using the trained model;
- Step 8: validation on the CPU and on a development board in an embedded system.
3.1. Traffic Sign Detection (TSD) Step
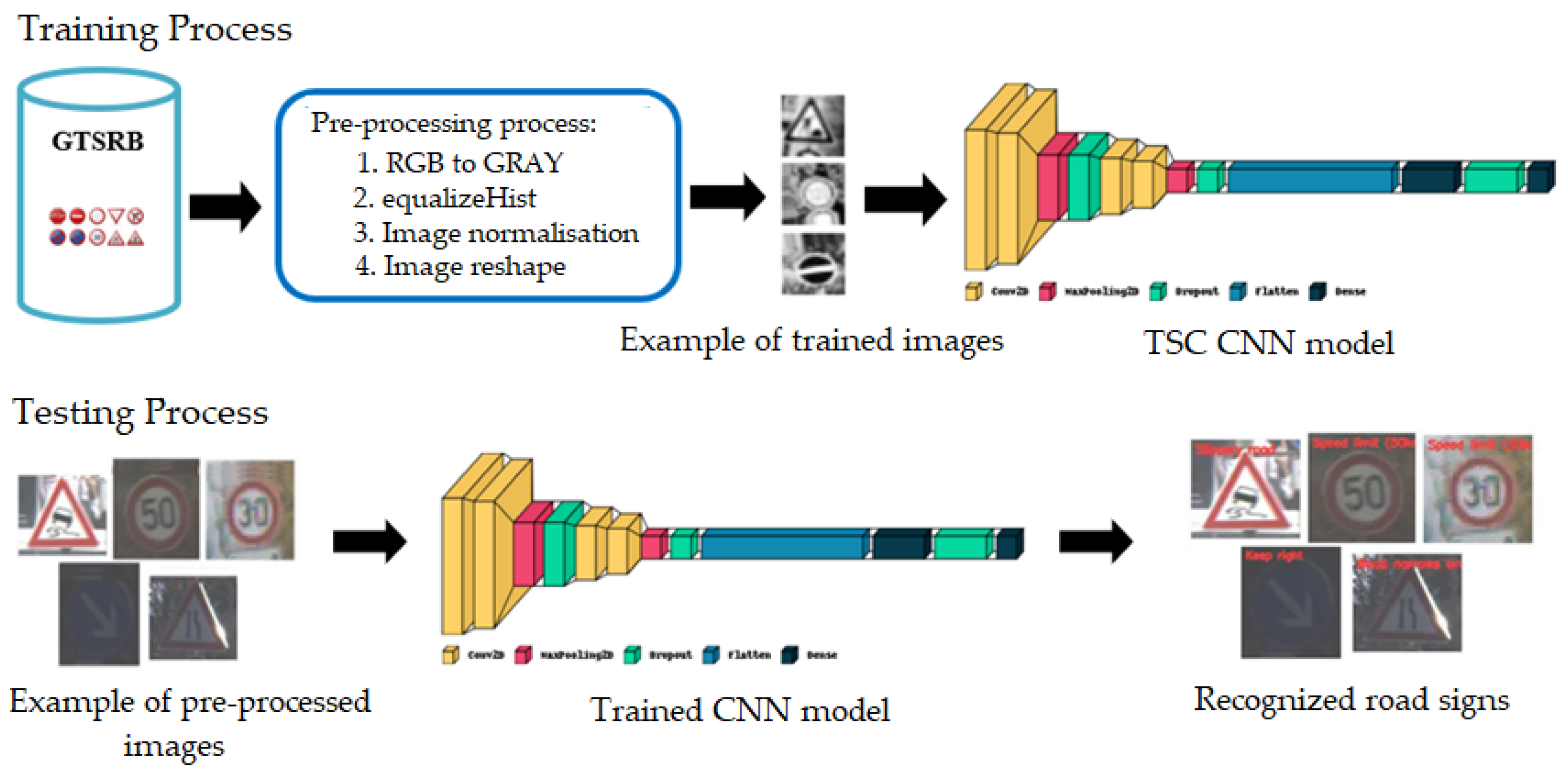
3.2. Traffic Sign Classification (TSC) Step
3.2.1. GTSRB Dataset
- Image resolution: the images in the GTSRB dataset are of various resolutions, ranging from 15 × 15 pixels to 250 × 250 pixels;
- Annotation: The dataset was annotated by human experts who manually labelled each image with the corresponding traffic sign class. The annotations include both the bounding box coordinates for the traffic sign and the corresponding class label and were performed using an online annotation tool specifically designed for the task of traffic sign recognition;
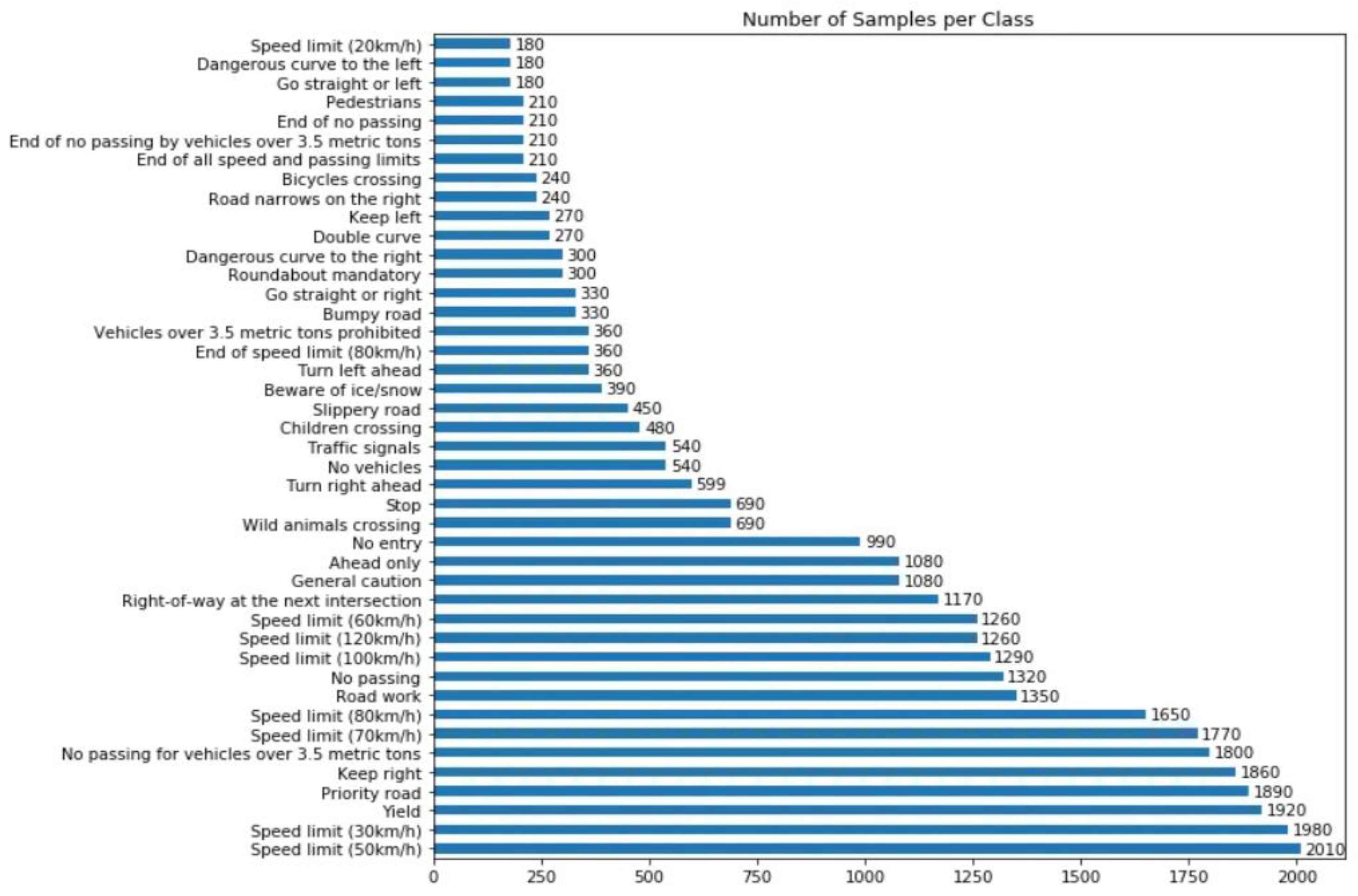
- Diversity: It contains a diverse set of traffic signs, including speed limit signs, warning signs, and prohibition signs. Some traffic signs may be overrepresented or underrepresented in the dataset due to differences in their frequency in real-world traffic scenes. In fact, the distribution of the number of samples used to train the model per class shown in Figure 8 is not uniform. The largest classes have 10 times more traffic sign images than the smallest ones. This is normal since, in real life, some signs appear more frequently than others. To address this, the dataset includes a training-validation-test split that helps ensure that the models trained on the dataset are evaluated on a representative set of data;
- Collection method: the GTSRB dataset was collected using a camera mounted on a vehicle and taken under different conditions (blur, lighting, etc.) to ensure a fair evaluation of model performance;
- Availability: this dataset is freely available for academic and research purposes;
- Usage: It is commonly used for evaluating the performance of various traffic sign recognition algorithms, including deep learning-based approaches. The dataset has been used in various competitions, challenges, and research projects related to traffic sign recognition [44]. The use of this dataset has led to the development of many state-of-the-art traffic sign recognition algorithms, which have potential applications in areas such as autonomous driving and road safety;
- Complexity: the GTSRB dataset is considered challenging due to the large number of classes and the variation in the appearance of traffic signs due to lighting conditions, weather, and occlusion.
3.2.2. TSC Models and Architectures
- Attention mechanism
| Algorithm 1 Attention (timestamp, features) |
| Input: timestamp, features |
| Output: weighted output sequence |
| For each t ∈ timestamp, f ∈ features |
| Input (t, f) |
| Dense layer (t, f) |
| Multiplication (Input (t, f), Dense layer (t, f)) |
| End For |
- 2.
- Classification metrics
- True positives (TP): the number of positive instances that were classified as positive;
- True negatives (TN): the number of negative instances that were classified as negative;
- False positives (FP): the number of negative instances that were classified as positive;
- False negatives (FN): the number of positive instances that were classified as negative;
- The used metrics are accuracy, precision, recall, and F1;
- Accuracy, used to evaluate the classification model, is the ration of the number of correct predictions to the total number of predictions:
- Precision, often referred to as positive predictive value, is the ratio of correctly classified positive instances to the total number of instances classified as positive:
- Recall, also called sensitivity or true positive rate, is the ratio of correctly classified positive instances to the total number of positive instances:
- F1 combines precision and recall as a single value:
- 3.
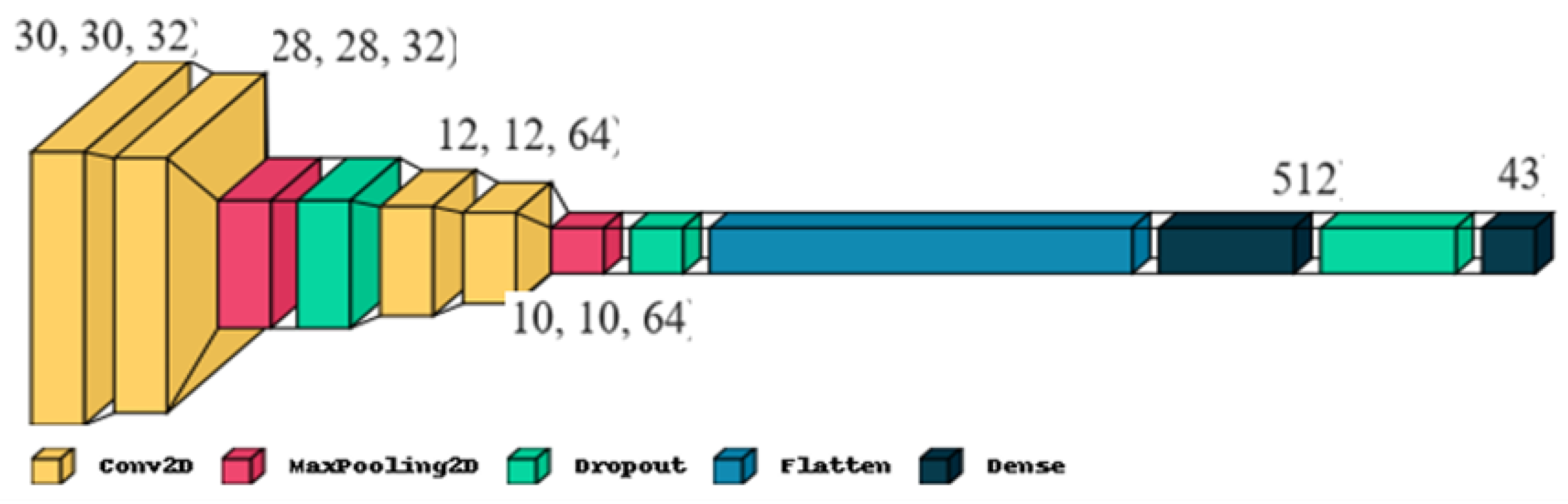
- Obtained results using the TSC model without the attention mechanism (TSC_M)
- 4.
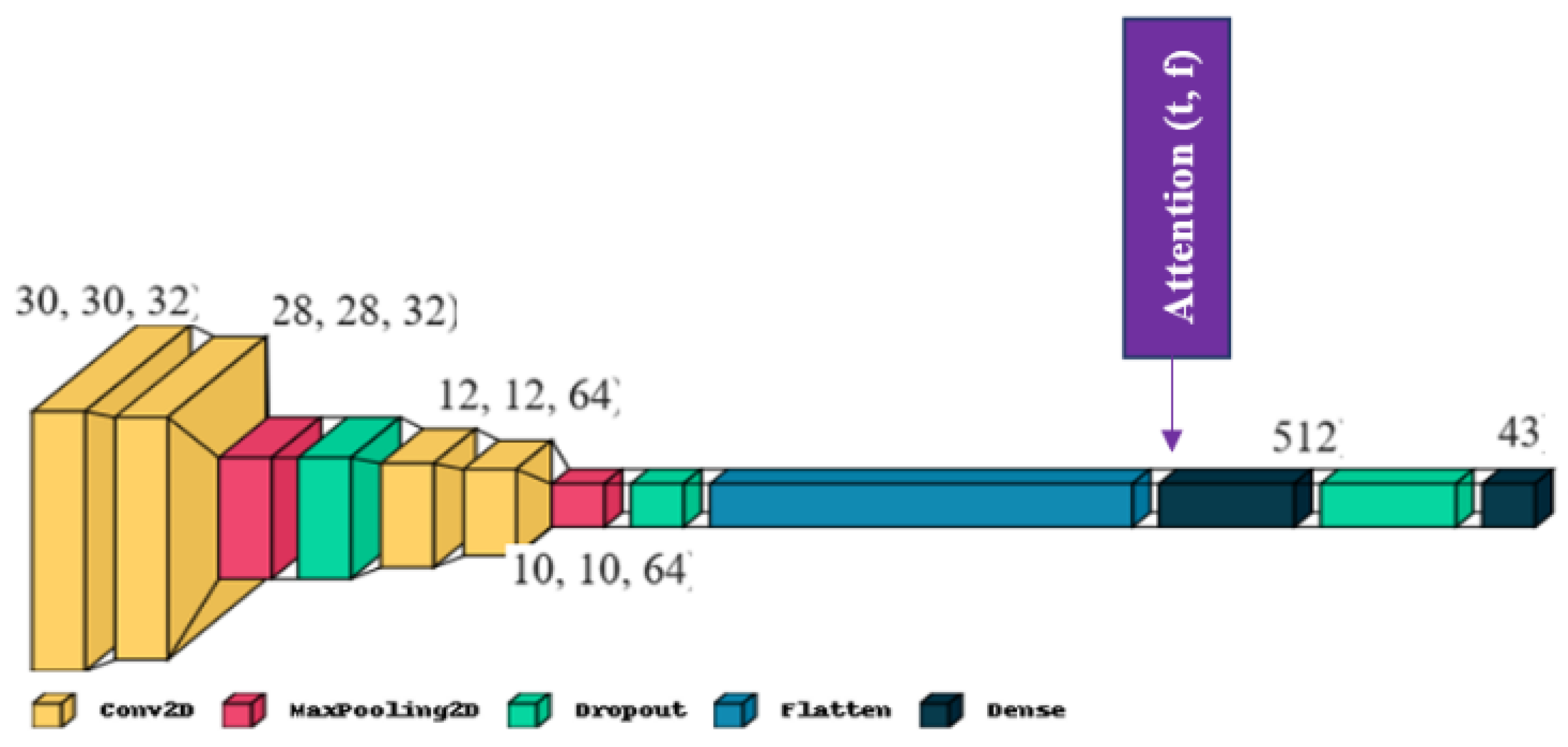
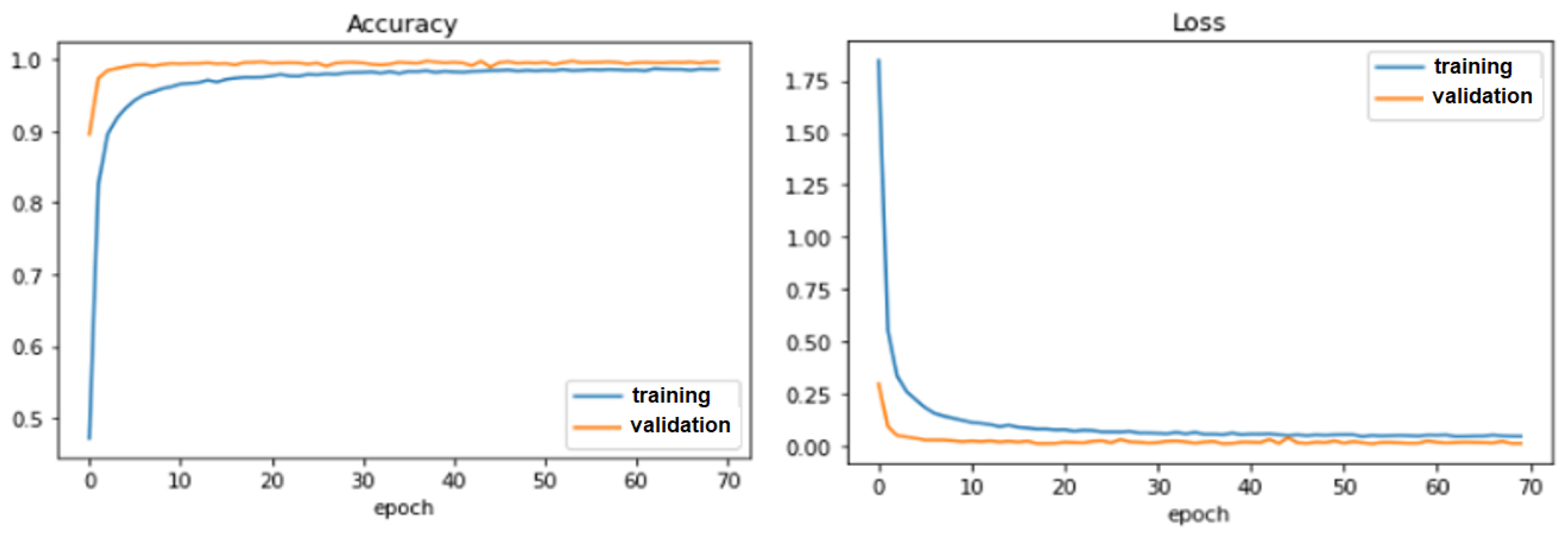
- Obtained results using the TSC model with attention mechanism (TSC_MA)
- 5.
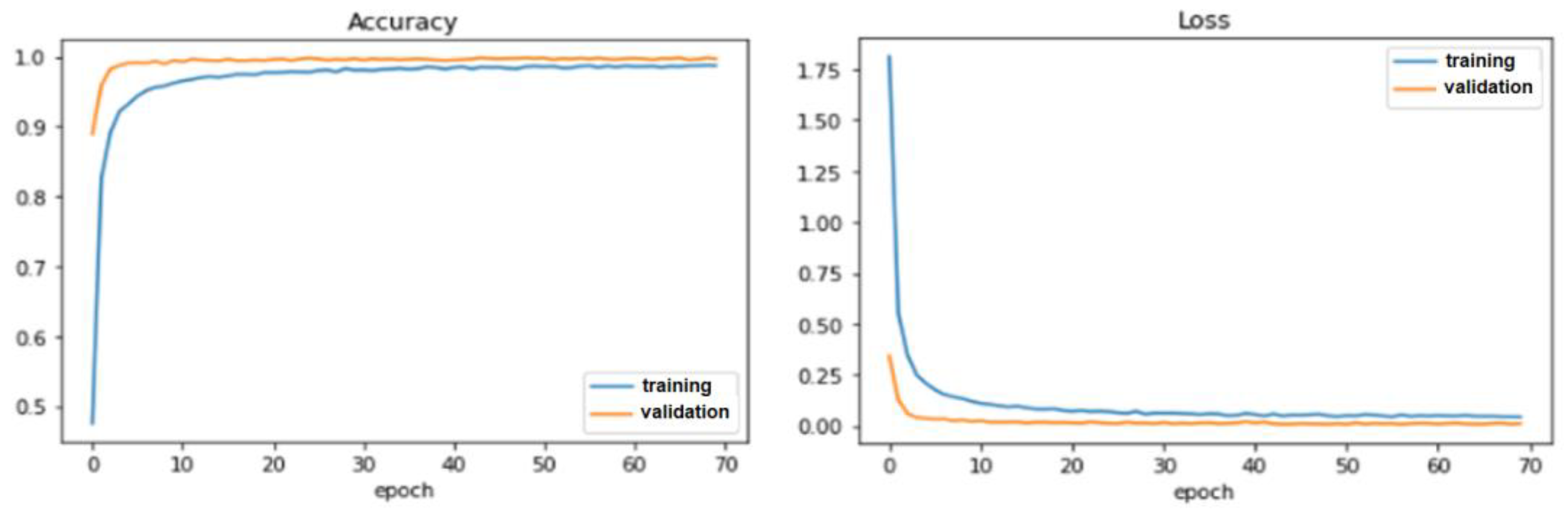
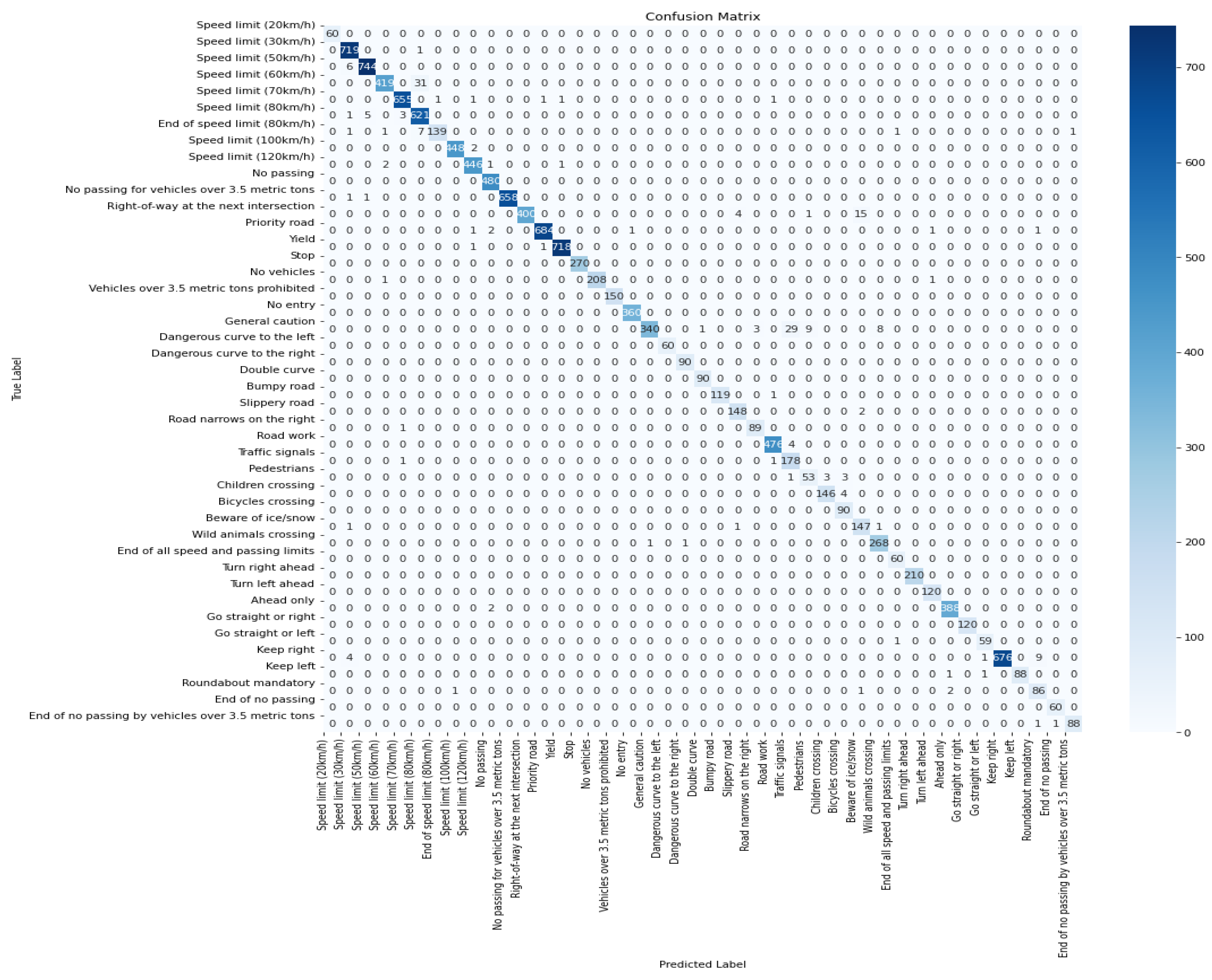
- Classification step’s performance evaluation
4. Experimental Results and Discussion
4.1. ARM Experimentation
4.2. Raspberry Pi Experimentation
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Wintersberger, P.; Riener, A. Trust in Technology as a Safety Aspect in Highly Automated Driving. i-com 2016, 15, 297–310. [Google Scholar] [CrossRef]
- Youssef, A.; Albani, D.; Nardi, D.; Bloisi, D.D. Fast Traffic Sign Recognition Using Color Segmentation and Deep Convolutional Networks. In Advanced Concepts for Intelligent Vision Systems; Blanc-Talon, J., Distante, C., Philips, W., Popescu, D., Scheunders, P., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2016; Volume 10016, pp. 205–216. ISBN 978-3-319-48679-6. [Google Scholar]
- Wali, S.B.; Hannan, M.A.; Hussain, A.; Samad, S.A. Comparative Survey on Traffic Sign Detection and Recognition: A Review. Prz. Elektrotechniczny 2015, 91, 38–42. [Google Scholar] [CrossRef]
- Saadna, Y.; Behloul, A. An Overview of Traffic Sign Detection and Classification Methods. Int. J. Multimed. Inf. Retr. 2017, 6, 193–210. [Google Scholar] [CrossRef]
- Ali, N.M.; Rashid, N.A.M.M.; Mustafah, Y.M. Performance Comparison between RGB and HSV Color Segmentations for Road Signs Detection. In Applied Mechanics and Materials; Trans Tech Publications Ltd.: Stafa-Zurich, Switzerland, 2013. [Google Scholar] [CrossRef]
- Rajendran, S.P.; Shine, L.; Pradeep, R.; Vijayaraghavan, S. Real-Time Traffic Sign Recognition Using YOLOv3 Based Detector. In Proceedings of the 2019 10th International Conference on Computing, Communication and Networking Technologies (ICCCNT), Kanpur, India, 6–8 July 2019; pp. 1–7. [Google Scholar]
- Li, C.; Yang, C. The Research on Traffic Sign Recognition Based on Deep Learning. In Proceedings of the 2016 16th International Symposium on Communications and Information Technologies (ISCIT), Qingdao, China, 26–28 September 2016; pp. 156–161. [Google Scholar]
- Kaplan Berkaya, S.; Gunduz, H.; Ozsen, O.; Akinlar, C.; Gunal, S. On Circular Traffic Sign Detection and Recognition. Expert Syst. Appl. 2016, 48, 67–75. [Google Scholar] [CrossRef]
- Coţovanu, D.; Zet, C.; Foşalău, C.; Skoczylas, M. Detection of Traffic Signs Based on Support Vector Machine Classification Using HOG Features. In Proceedings of the 2018 International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 18–19 October 2018; pp. 0518–0522. [Google Scholar]
- He, X.; Dai, B. A New Traffic Signs Classification Approach Based on Local and Global Features Extraction. In Proceedings of the 2016 6th International Conference on Information Communication and Management (ICICM), Hatfield, UK, 29–31 October 2016; pp. 121–125. [Google Scholar]
- Sathish, P.; Bharathi, D. Automatic Road Sign Detection and Recognition Based on SIFT Feature Matching Algorithm. In Proceedings of the International Conference on Soft Computing Systems; Suresh, L.P., Panigrahi, B.K., Eds.; Springer India: New Delhi, India, 2016; pp. 421–431. [Google Scholar]
- Lasota, M.; Skoczylas, M. Recognition of Multiple Traffic Signs Using Keypoints Feature Detectors. In Proceedings of the 2016 International Conference and Exposition on Electrical and Power Engineering (EPE), Iasi, Romania, 20–22 October 2016; pp. 535–540. [Google Scholar]
- Behloul, A.; Saadna, Y. A Fast and Robust Traffic Sign Recognition. Int. J. Innov. Appl. Stud. 2014, 5, 139–149. [Google Scholar]
- Aghdam, H.H.; Heravi, E.J.; Puig, D. A Practical and Highly Optimized Convolutional Neural Network for Classifying Traffic Signs in Real-Time. Int. J. Comput. Vis. 2017, 122, 246–269. [Google Scholar] [CrossRef]
- Babić, D.; Babić, D.; Fiolić, M.; Šarić, Ž. Analysis of Market-Ready Traffic Sign Recognition Systems in Cars: A Test Field Study. Energies 2021, 14, 3697. [Google Scholar] [CrossRef]
- Lambert, F. Tesla Releases New Software Update to Visually Detect Speed Limit Signs, and More. Electrek 2020, 5, 100113. [Google Scholar]
- Kryvinska, N.; Poniszewska-Maranda, A.; Gregus, M. An Approach towards Service System Building for Road Traffic Signs Detection and Recognition. Procedia Comput. Sci. 2018, 141, 64–71. [Google Scholar] [CrossRef]
- Boumediene, M.; Lauffenburger, J.P.; Daniel, J.; Cudel, C.; Mips-Ea, L. De´tection, association et suivi de pistes pour la reconnaissance de panneaux routiers. In Proceedings of the Rencontres francophones sur la Logique Floues et ses Applications; Detection, Association and Tracking for Traffic Sign Recognition, Cargèse, France, 8 October 2014. [Google Scholar]
- Liu, C.; Li, S.; Chang, F.; Wang, Y. Machine Vision Based Traffic Sign Detection Methods: Review, Analyses and Perspectives. IEEE Access 2019, 7, 86578–86596. [Google Scholar] [CrossRef]
- Zeng, Y.; Lan, J.; Ran, B.; Wang, Q.; Gao, J. Restoration of Motion-Blurred Image Based on Border Deformation Detection: A Traffic Sign Restoration Model. PLoS ONE 2015, 10, e0120885. [Google Scholar] [CrossRef]
- Zakir, U.; Leonce, A.N.J.; Edirisinghe, E. Road Sign Segmentation Based on Colour Spaces: A Comparative Study. In Proceedings of the 11th Iasted International Conference on Computer Graphics and Imgaing, Innsbruck, Austria, 17–19 February 2010. [Google Scholar]
- Faiedh, H.; Farhat, W.; Hamdi, S.; Souani, C. Embedded Real-Time System for Traffic Sign Recognition on ARM Processor. Int. J. Appl. Metaheuristic Comput. 2020, 11, 77–98. [Google Scholar] [CrossRef]
- Belaroussi, R.; Foucher, P.; Tarel, J.-P.; Soheilian, B.; Charbonnier, P.; Paparoditis, N. Road Sign Detection in Images: A Case Study. In Proceedings of the 2010 20th International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010; pp. 484–488. [Google Scholar]
- Barnes, N.; Zelinsky, A.; Fletcher, L.S. Real-Time Speed Sign Detection Using the Radial Symmetry Detector. IEEE Trans. Intell. Transp. Syst. 2008, 9, 322–332. [Google Scholar] [CrossRef]
- Viola, P.; Jones, M. Rapid Object Detection Using a Boosted Cascade of Simple Features. In Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition, CVPR 2001, Kauai, HI, USA, 8–14 December 2001; IEEE Computer Society: Kauai, HI, USA, 2001; Volume 1, pp. I-511–I–518. [Google Scholar]
- Ruta, A.; Li, Y.; Liu, X. Towards Real-Time Traffic Sign Recognition by Class-Specific Discriminative Features; BMVA Press: Durham, UK, 2007; Volume 1. [Google Scholar]
- Prisacariu, V.A.; Timofte, R.; Zimmermann, K.; Reid, I.; Van Gool, L. Integrating Object Detection with 3D Tracking Towards a Better Driver Assistance System. In Proceedings of the 2010 20th International Conference on Pattern Recognition, Istanbul, Turkey, 23–26 August 2010; pp. 3344–3347. [Google Scholar]
- Agrawal, S.; Chaurasiya, R.K. Ensemble of SVM for Accurate Traffic Sign Detection and Recognition. In Proceedings of the International Conference on Graphics and Signal Processing, Singapore, 24–27 June 2017; Association for Computing Machinery: New York, NY, USA, 2017; pp. 10–15. [Google Scholar]
- Zhang, J.; Huang, M.; Jin, X.; Li, X. A Real-Time Chinese Traffic Sign Detection Algorithm Based on Modified YOLOv2. Algorithms 2017, 10, 127. [Google Scholar] [CrossRef]
- Jeon, W.J.; Sanchez, G.A.R.; Lee, T.; Choi, Y.; Woo, B.; Lim, K.; Byun, H. Real-Time Detection of Speed-Limit Traffic Signs on the Real Road Using Haar-like Features and Boosted Cascade. In Proceedings of the 8th International Conference on Ubiquitous Information Management and Communication—ICUIMC’14, Siem Reap, Cambodia, 9–11 January 2014; ACM Press: Siem Reap, Cambodia, 2014; pp. 1–5. [Google Scholar]
- Abdi, L.; Meddeb, A. Deep Learning Traffic Sign Detection, Recognition and Augmentation. In Proceedings of the SAC’17: Symposium on Applied Computing, Marrakech, Morocco, 3–7 April 2017; pp. 131–136. [Google Scholar]
- Zaklouta, F.; Stanciulescu, B.; Hamdoun, O. Traffic Sign Classification Using K-d Trees and Random Forests. In Proceedings of the 2011 International Joint Conference on Neural Networks, San Jose, CA, USA, 31 July–5 August 2011; pp. 2151–2155. [Google Scholar]
- Aziz, S.; Aroussi, M.; FAKHRI, Y. Traffic Sign Recognition Based on Multi-Feature Fusion and ELM Classifier. Procedia Comput. Sci. 2018, 127, 146–153. [Google Scholar] [CrossRef]
- Triki, N.; Ksantini, M.; Karray, M. Traffic Sign Recognition System Based on Belief Functions Theory. In Proceedings of the 13th International Conference on Agents and Artificial Intelligence, Virtual Event, 4–6 February 2021; pp. 775–780. [Google Scholar]
- Alzubaidi, L.; Zhang, J.; Humaidi, A.J.; Al-Dujaili, A.; Duan, Y.; Al-Shamma, O.; Santamaría, J.; Fadhel, M.A.; Al-Amidie, M.; Farhan, L. Review of Deep Learning: Concepts, CNN Architectures, Challenges, Applications, Future Directions. J. Big Data 2021, 8, 53. [Google Scholar] [CrossRef] [PubMed]
- Li, Z.; Liu, F.; Yang, W.; Peng, S.; Zhou, J. A Survey of Convolutional Neural Networks: Analysis, Applications, and Prospects. IEEE Trans. Neural Netw. Learn. Syst. 2022, 33, 6999–7019. [Google Scholar] [CrossRef]
- Yu, Y.; Liang, S.; Samali, B.; Nguyen, T.N.; Zhai, C.; Li, J.; Xie, X. Torsional Capacity Evaluation of RC Beams Using an Improved Bird Swarm Algorithm Optimised 2D Convolutional Neural Network. Eng. Struct. 2022, 273, 115066. [Google Scholar] [CrossRef]
- Yu, Y.; Li, J.; Li, J.; Xia, Y.; Ding, Z.; Samali, B. Automated Damage Diagnosis of Concrete Jack Arch Beam Using Optimized Deep Stacked Autoencoders and Multi-Sensor Fusion. Dev. Built Environ. 2023, 14, 100128. [Google Scholar] [CrossRef]
- Zeng, Y.; Xu, X.; Shen, D.; Fang, Y.; Xiao, Z. Traffic Sign Recognition Using Kernel Extreme Learning Machines with Deep Perceptual Features. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1647–1653. [Google Scholar] [CrossRef]
- Aghdam, H.; Heravi, E.; Puig, D. Recognizing Traffic Signs Using a Practical Deep Neural Network. In Robot 2015: Second Iberian Robotics Conference: Advances in Robotics, Volume 1; Springer International Publishing: Cham, Switzerland, 2016; Volume 417, ISBN 978-3-319-27145-3. [Google Scholar]
- Berghoff, C.; Bielik, P.; Neu, M.; Tsankov, P.; von Twickel, A. Robustness Testing of AI Systems: A Case Study for Traffic Sign Recognition. In Artificial Intelligence Applications and Innovations, Proceedings of the 17th IFIP WG 12.5 International Conference, AIAI 2021, Hersonissos, Crete, Greece, 25–27 June 2021, Proceedings 17; Springer International Publishing: New York, NY, USA, 2021; Volume 627, pp. 256–267. [Google Scholar]
- Tabernik, D.; Skočaj, D. Deep Learning for Large-Scale Traffic-Sign Detection and Recognition. IEEE Trans. Intell. Transp. Syst. 2020, 21, 1427–1440. [Google Scholar] [CrossRef]
- Traffic Sign Recognition in Harsh Environment Using Attention Based Convolutional Pooling Neural Network|SpringerLink. Available online: https://link.springer.com/article/10.1007/s11063-020-10211-0.
- Stallkamp, J.; Schlipsing, M.; Salmen, J.; Igel, C. The German Traffic Sign Recognition Benchmark: A Multi-Class Classification Competition. In Proceedings of the 2011 International Joint Conference on Neural Networks, San Jose, CA, USA, 31 July–5 August 2011; pp. 1453–1460. [Google Scholar]
- Chorowski, J.; Bahdanau, D.; Serdyuk, D.; Cho, K.; Bengio, Y. Attention-Based Models for Speech Recognition. arXiv 2015, arXiv:1506.07503. [Google Scholar]
- Bahdanau, D.; Cho, K.; Bengio, Y. Neural Machine Translation by Jointly Learning to Align and Translate. arXiv 2016, arXiv:1409.0473. [Google Scholar]
- Rush, A.M.; Chopra, S.; Weston, J. A Neural Attention Model for Abstractive Sentence Summarization. arXiv 2015, arXiv:1509.00685. [Google Scholar]
- Chaudhari, T.; Wale, A.; Joshi, P.A.; Sawant, P.S. Traffic Sign Recognition Using Small-Scale Convolutional Neural Network; Social Science Research Network: Rochester, NY, USA, 2020. [Google Scholar]
- Lim, K.; Hong, Y.; Choi, Y.; Byun, H. Real-Time Traffic Sign Recognition Based on a General Purpose GPU and Deep-Learning. PLoS ONE 2017, 12, e0173317. [Google Scholar] [CrossRef]
- Akshay, G.; Dinesh, K.; Scholars, U. Road Sign Recognition System Using Raspberry Pi. Int. J. Pure Appl. Math. 2018, 119, 1845–1850. [Google Scholar]
- Vinit, P.K. A Road Sign Detection and Recognition Robot Using Raspberry-Pi. Int. Res. J. Eng. Technol. (IRJET) 2018, 5, 1–5. [Google Scholar]
- Bilgin, E.; Robila, S. Road Sign Recognition System on Raspberry Pi. In Proceedings of the 2016 IEEE Long Island Systems, Applications and Technology Conference (LISAT), Farmingdale, NY, USA, 29 April 2016; pp. 1–5. [Google Scholar]
- Isa, I.S.B.M.; Choy, J.Y.; Shaari, N.L.A.B.M. Real-Time Traffic Sign Detection and Recognition Using Raspberry Pi. Int. J. Electr. Comput. Eng. (IJECE) 2022, 12, 331. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Machine Learning Traffic Sign Detectors | Features | Training Methods |
|---|---|---|
| AdaBoost-based methods | Haar-like | Features cascade |
| SVM-based methods | HOG features | Linear SVM |
| Deep Learning Traffic Sign Detectors | Training Methods |
|---|---|
| SVM + CNN | |
| Convolutional neural network (CNN) | |
| CNN-based detection methods | FCN and Deep CNN |
| Faster RCNN | |
| Cascaded convolutional networks | |
| YOLOv2 and YOLOv3 |
| Features Descriptors | ML Classifiers | CR (%) | Dataset | Time (s) |
|---|---|---|---|---|
| HOG | K-d trees | 92.90 | GTSRB | - |
| Random Forest | 97.20 | - | ||
| Gabor + LBP + HOG | SVM | 97.04 | GTSRB (48 × 48 images) | - |
| HOG | 95.70 | 0.08 | ||
| CLBP | 96.88 | 1.21 | ||
| Gabor | 94.10 | 2.32 | ||
| HOG + CLBP | ELM | 97.03 | 1.49 | |
| HOG + Gabor | 96.90 | GTSRB | 2.57 | |
| CLBP + Gabor | 96.40 | 3.54 | ||
| HOG + CLBP + Gabor | 99.10 | 3.68 |
| Deep Learning Classifiers | CR (%) | Dataset | Time (s) |
|---|---|---|---|
| CNN + ELM | 99.40 | GTSRB | 64.8 |
| Single CNN | 99.50 | - | |
| 2 Compact ConvNet | 99.61 | - | |
| 3 CNN | 99.70 | 24.94 |
| TSD Methods | Techniques | DRs (%) | Detection Time (ms) |
|---|---|---|---|
| Colour-based methods | MSER in HSV [23] | 96 | - |
| Shape-based methods | EDC Circles [8] | 84.64 | 36 |
| Colour and shape-based methods | HSV + HOG [2] | 95.03 | 236 |
| Machine Learning-based methods | Haar cascade [31] | 99.05 | - |
| Deep Learning-based methods | Modified YOLOv2 [28] | 96.69 | 17 |
| TSC Methods | CR (%) | Dataset | Classification Time (s) |
|---|---|---|---|
| ML method: HOG + CLBP + Gabor ELM [33] | 99.10 | GTSRB (48 × 48 images) | 3.68 |
| DL methods: three CNN [14] | 99.70 | GTSRB | 24.94 |
| Epoch | Accuracy (%) | Loss (%) | ||||
|---|---|---|---|---|---|---|
| Training | Validation | Testing | Training | Validation | Testing | |
| 30 | 99.89 | 99.43 | 98.10 | 0.00339 | 0.02 | 0.070 |
| 70 | 99.97 | 99.68 | 98.56 | 0.00098 | 0.01 | 0.060 |
| 100 | 99.99 | 99.63 | 98.46 | 0.00050 | 0.01 | 0.067 |
| Precision | Recall | F1 Score | |
|---|---|---|---|
| Weighted avg (%) | 98 | 98 | 98 |
| Epoch | Accuracy (%) | Loss (%) | ||||
|---|---|---|---|---|---|---|
| Training | Validation | Testing | Training | Validation | Testing | |
| 30 | 99.99 | 99.97 | 98.88 | 0.0055 | 0.02 | 0.091 |
| 70 | 99.99 | 99.67 | 98.91 | 0.0020 | 0.009 | 0.062 |
| Precision | Recall | F1 Score | |
|---|---|---|---|
| Weighted avg (%) | 99 | 99 | 99 |
| GTSRB Dataset Accuracy Results (%) | BTSCB Dataset Accuracy Results (%) | |||||
|---|---|---|---|---|---|---|
| Epoch | Training | Validation | Testing | Training | Validation | Testing |
| 70 | 99.99 | 99.97 | 99.91 | 99.35 | 99.31 | 99.27 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Triki, N.; Karray, M.; Ksantini, M. A Real-Time Traffic Sign Recognition Method Using a New Attention-Based Deep Convolutional Neural Network for Smart Vehicles. Appl. Sci. 2023, 13, 4793. https://doi.org/10.3390/app13084793
Triki N, Karray M, Ksantini M. A Real-Time Traffic Sign Recognition Method Using a New Attention-Based Deep Convolutional Neural Network for Smart Vehicles. Applied Sciences. 2023; 13(8):4793. https://doi.org/10.3390/app13084793
Chicago/Turabian StyleTriki, Nesrine, Mohamed Karray, and Mohamed Ksantini. 2023. "A Real-Time Traffic Sign Recognition Method Using a New Attention-Based Deep Convolutional Neural Network for Smart Vehicles" Applied Sciences 13, no. 8: 4793. https://doi.org/10.3390/app13084793
APA StyleTriki, N., Karray, M., & Ksantini, M. (2023). A Real-Time Traffic Sign Recognition Method Using a New Attention-Based Deep Convolutional Neural Network for Smart Vehicles. Applied Sciences, 13(8), 4793. https://doi.org/10.3390/app13084793