

Feature Identification, Solution Disassembly and Cost Comparison of Intelligent Driving under Different Technical Routes


Abstract
1. Introduction
2. Feature Identification of Intelligent Driving Technical Routes
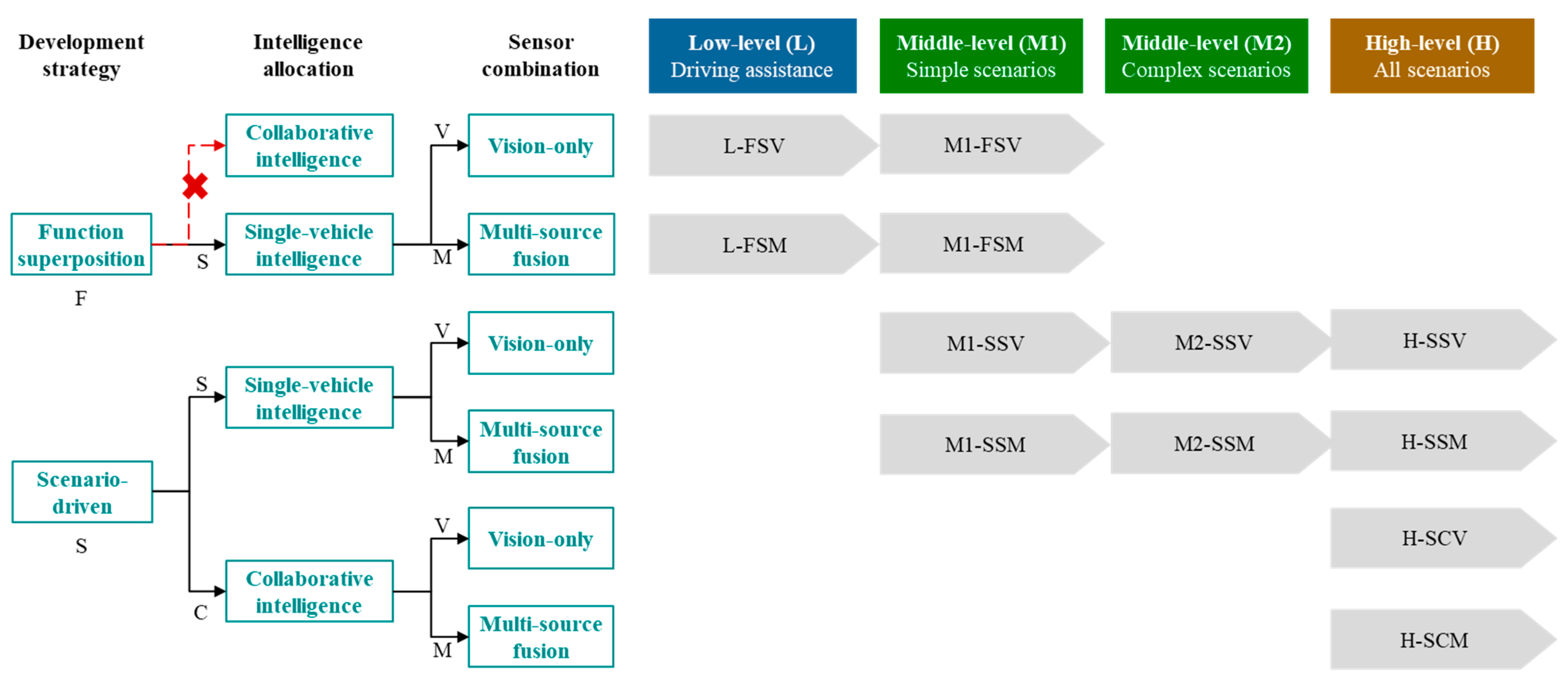
2.1. Development Strategy
2.2. Intelligence Allocation
2.3. Sensor Combination
2.4. Main Technical Routes of Intelligent Driving at Different Levels
3. Solution Disassembly of Intelligent Driving Technical Routes
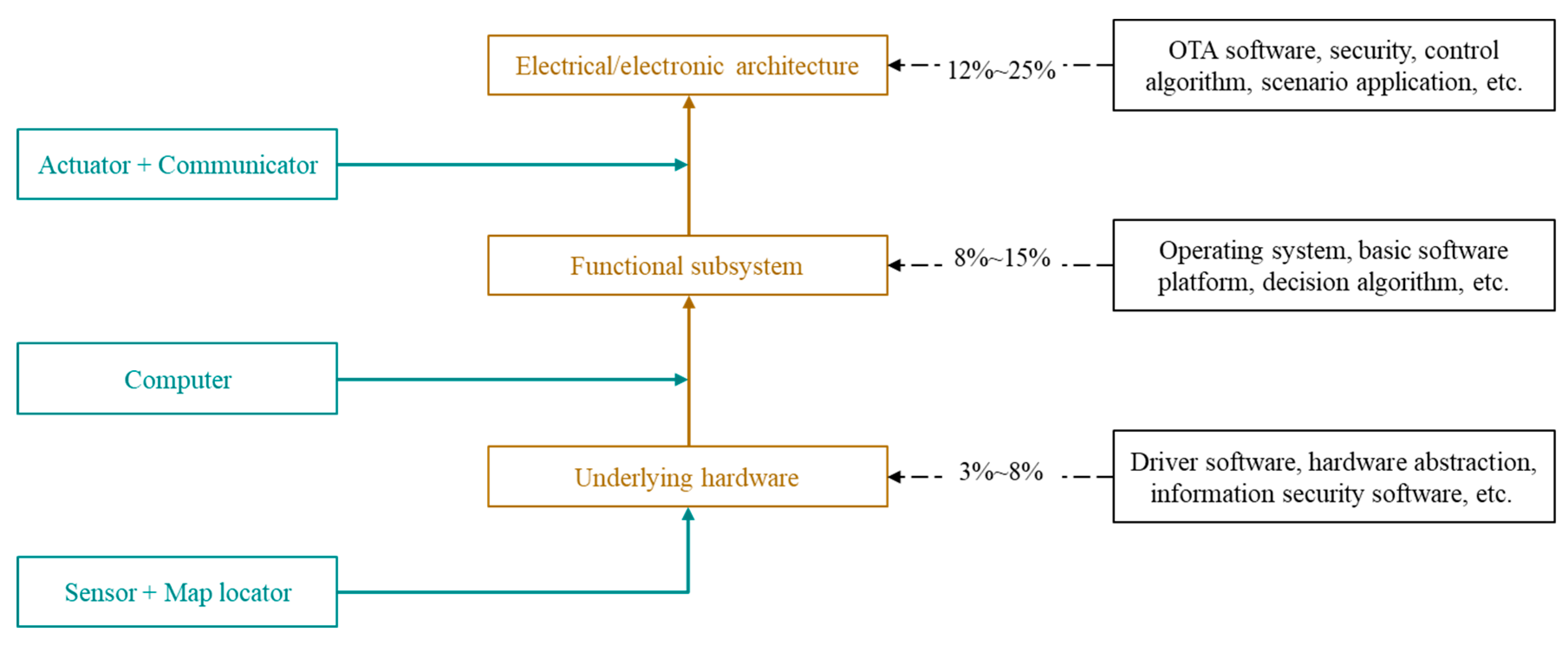
3.1. Technical Components of Intelligent Driving
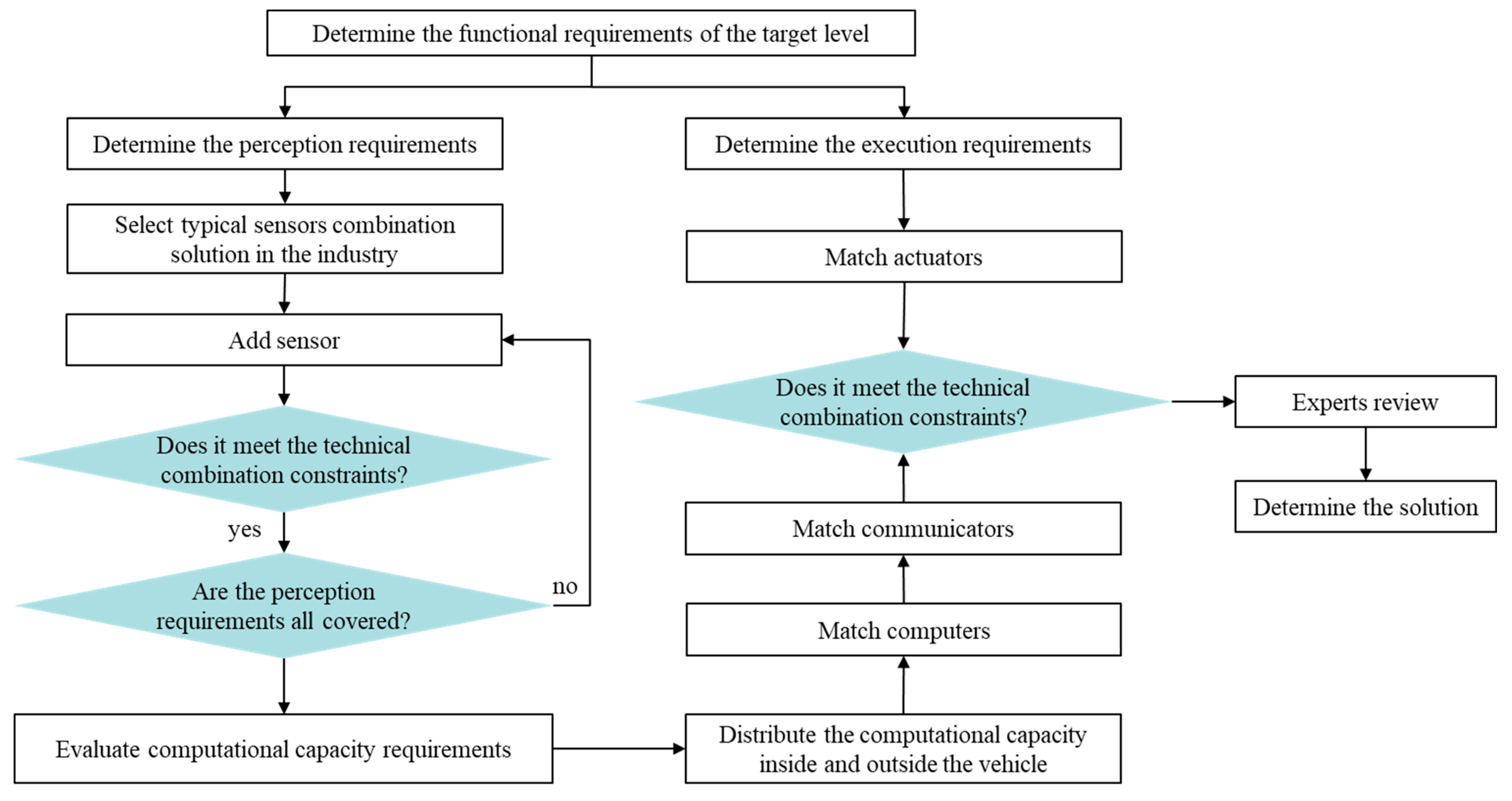
3.2. Methodology of Technical Component Combination
3.3. Technical Component Combinations under Different Technical Routes
4. TCO Evaluation Model of Intelligent Driving
4.1. Hardware Cost
4.2. Software Cost
4.3. Power Consumption Cost
4.4. Data Traffic Cost
4.5. Maintenance Cost
5. Results and Discussion
5.1. Cost Comparison of Different Levels
5.2. Cost Comparison of Different Development Strategies
5.3. Cost Comparison of Different Intelligence Allocations
5.4. Cost Comparison of Different Sensor Combinations
5.5. Uncertainty Analysis
6. Conclusions
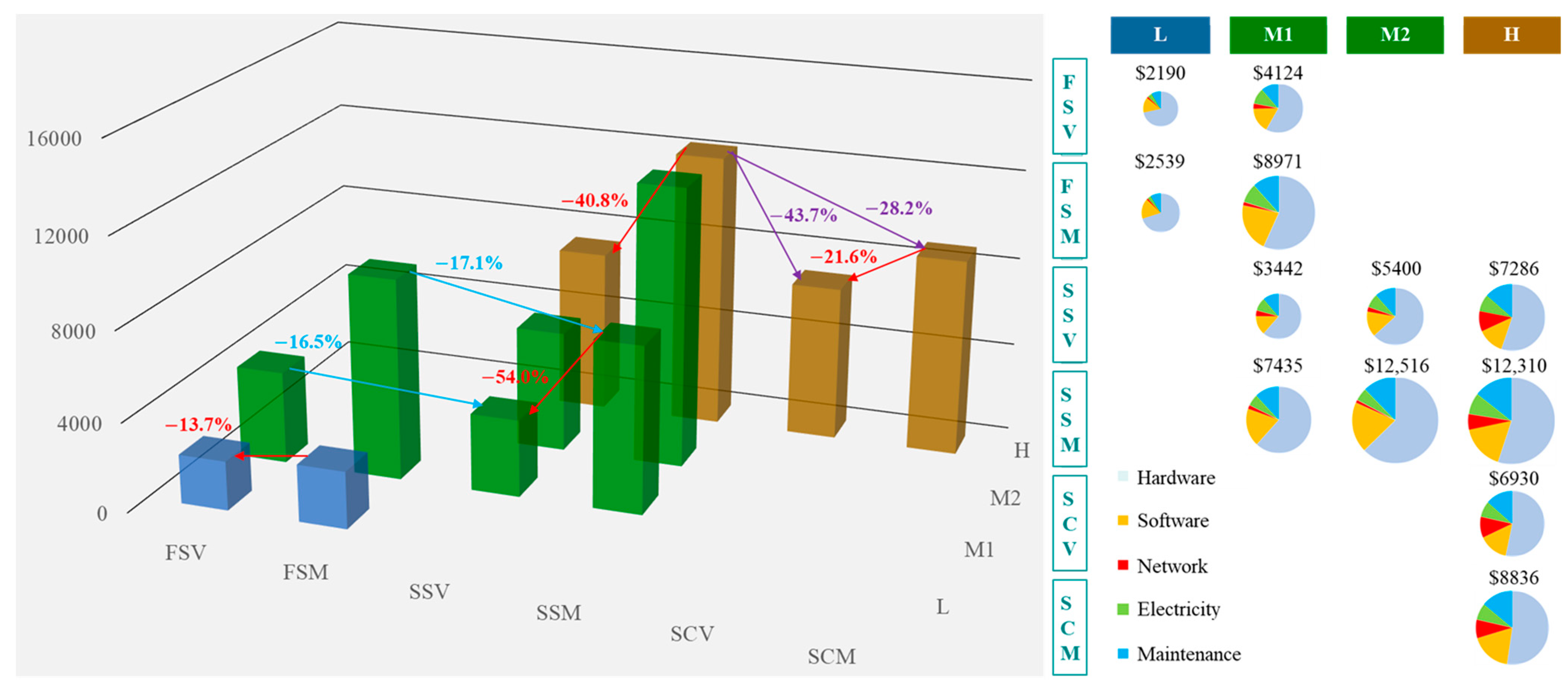
- At the low-level, the vision-only route has an 11% cost advantage compared with the multi-source fusion route.
- At the medium-level with simple scenarios, the scenario-driven strategy saves about 13% TCO compared with the function superposition strategy. Even considering the inheritance of R&D cost of low-level systems under the function superposition strategy, the scenario-driven strategy still has a cost advantage of 10%.
- At the medium-level with complex scenarios, the hardware cost of the sensor combination solution with a multi-source fusion route reaches USD 7737, far exceeding the current willingness of consumers in China to pay USD 4600, while the TCO of the vision-only route can be controlled at USD 5400.
- At the high-level, collaborative intelligence can save up to 46% of the TCO compared with single-vehicle intelligence, and the reduction of costs depends on the type and quantity of the original on-board hardware. In addition, with the help of collaborative intelligence, the cost difference between vision-only and multi-source fusion routes will be controlled within USD 2000.
- In the choice of development strategy, a scenario-driven strategy not only has cost advantages, but also can continuously evolve to a higher level of intelligence. OEMs should shift their development strategy to scenario-driven options as soon as possible and put products on the market to build a data closed loop. At the same time, due to the high cost of medium-level intelligent driving in complex scenarios, whether OEMs should commercialize it in 2025 is a topic worthy of further discussion.
- In the choice of intelligence allocation, collaborative intelligence can effectively reduce the TCO compared with single-vehicle intelligence. On the premise that China has announced that it will develop collaborative intelligence, the government should speed up the deployment of infrastructure, the construction of pilot demonstration areas and the improvement of relevant standards and regulations. OEMs should actively seek cross-border cooperation and jointly explore the new value that collaborative intelligence can create, such as traffic safety and travel efficiency, so as to further enhance the economy of collaborative intelligence [45].
- In the choice of sensor combinations, the vision-only route has an obvious cost advantage, but at present, only a few OEMs, such as Tesla, have made some breakthroughs in technology. Therefore, OEMs which lack previous relevant technical experience should avoid blindly switching technical routes. In addition, because collaborative intelligence can effectively narrow the cost gap between vision-only and multi-source fusion routes, OEMs need not worry too much that choosing multi-source fusion will make the product lose its market competitiveness.
- Compared with the TCO of medium- and high-level intelligent driving, China consumers’ willingness to pay is relatively low at present. OEMs and the government should consciously increase consumers’ willingness to pay for intelligent driving through advertising, popular science and other methods, and may also need to provide appropriate subsidies at the initial stage of market penetration of innovation.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Kuang, X.; Zhao, F.; Hao, H.; Liu, Z. Intelligent connected vehicles: The industrial practices and impacts on automotive value-chains in China. Asia Pac. Bus. Rev. 2018, 24, 1–21. [Google Scholar] [CrossRef]
- Xu, Q.; Li, K.; Wang, J.; Yuan, Q.; Yang, Y.; Chu, W. The status, challenges, and trends: An interpretation of technology roadmap of intelligent and connected vehicles in China (2020). J. Intell. Connect. Veh. 2022, 5, 1–7. [Google Scholar] [CrossRef]
- Tang, T.Q.; Gui, Y.; Zhang, J. ATAC-based car-following model for level 3 autonomous driving considering driver’s acceptance. IEEE T. Intell. Transp. 2021, 23, 10309–10321. [Google Scholar] [CrossRef]
- Wang, Z.; Wu, Y.; Niu, Q. Multi-sensor fusion in automated driving: A survey. IEEE Access 2019, 8, 2847–2868. [Google Scholar] [CrossRef]
- Tan, H.; Zhao, F.; Song, H.; Liu, Z. Quantifying the impact of deployments of autonomous vehicles and intelligent roads on road safety in China: A country-level modeling study. Int. J. Environ. Res. Public Health 2023, 20, 4069. [Google Scholar] [CrossRef]
- Higgins, A.; Paevere, P.; Gardner, J.; Quezada, G. Combining choice modelling and multi-criteria analysis for technology diffusion: An application to the uptake of electric vehicles. Technol. Forecast. Soc. 2012, 79, 1399–1412. [Google Scholar] [CrossRef]
- Bansal, P.; Kockelman, K.M. Forecasting Americans’ long-term adoption of connected and autonomous vehicle technologies. Transport. Res. A-Pol. 2017, 95, 49–63. [Google Scholar] [CrossRef]
- Shabanpour, R.; Golshani, N.; Shamshiripour, A.; Mohammadian, A.K. Eliciting preferences for adoption of fully automated vehicles using best-worst analysis. Transport. Res. C-Emer. 2018, 93, 463–478. [Google Scholar] [CrossRef]
- Abraham, H.; Lee, C.; Brady, S.; Fitzgerald, C.; Mehler, B.; Reimer, B.; Coughlin, J.F. Autonomous vehicles, trust, and driving alternatives: A survey of consumer preferences. Mass. Inst. Technol. AgeLab. Camb. 2016, 1, 2018–2034. [Google Scholar]
- Dixon, G.; Hart, P.S.; Clarke, C.; O’Donnell, N.H.; Hmielowski, J. What drives support for self-driving car technology in the United States? J. Risk. Res. 2020, 23, 275–287. [Google Scholar] [CrossRef]
- Bösch, P.M.; Becker, F.; Becker, H.; Axhausen, K.W. Cost-based analysis of autonomous mobility services. Transp. Policy 2018, 64, 76–91. [Google Scholar] [CrossRef]
- Abe, R. Introducing autonomous buses and taxis: Quantifying the potential benefits in Japanese transportation systems. Transport. Res. A-Pol. 2019, 126, 94–113. [Google Scholar] [CrossRef]
- Turoń, K.; Kubik, A. Economic aspects of driving various types of vehicles in intelligent urban transport systems, including car-sharing services and autonomous vehicles. Appl. Sci. 2020, 10, 5580. [Google Scholar] [CrossRef]
- Bailo, C.; Dziczek, K.; Smith, B.; Spulber, A.; Chen, Y.; Schultz, M. The great divide: What automotive consumers are buying vs. auto & supplier investments in future technologies, products & business models. Cent. Automot. Res. 2018, 1, 1–3. [Google Scholar]
- Ongel, A.; Loewer, E.; Roemer, F.; Sethuraman, G.; Chang, F.; Lienkamp, M. Economic assessment of autonomous electric microtransit vehicles. Sustainability 2019, 11, 648. [Google Scholar] [CrossRef]
- Wadud, Z. Fully automated vehicles: A cost of ownership analysis to inform early adoption. Transport. Res. A-Pol. 2017, 101, 163–176. [Google Scholar] [CrossRef]
- Tan, H.; Zhao, F.; Zhang, W.; Liu, Z. An evaluation of the safety effectiveness and cost of autonomous vehicles based on multivariable coupling. Sensors 2023, 23, 1321. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, W.; Zhao, F. Impact, challenges and prospect of software-defined vehicles. Automot. Innov. 2022, 5, 180–194. [Google Scholar] [CrossRef]
- Paukert, C. Why the 2019 Audi A8 Won’t Get Level 3 Partial Automation in the US. Roadshow. Available online: https://www.cnet.com/roadshow/news/2019-audi-a8-level-3-traffic-jam-pilot-self-driving-automation-not-for-us (accessed on 13 July 2022).
- Clark, J.R.; Stanton, N.A.; Revell, K. Automated vehicle handover interface design: Focus groups with learner, intermediate and advanced drivers. Automot. Innov. 2020, 3, 14–29. [Google Scholar] [CrossRef]
- Yang, D.; Jiao, X.; Jiang, K.; Cao, Z. Driving space for autonomous vehicles. Automot. Innov. 2019, 2, 241–253. [Google Scholar] [CrossRef]
- Wang, J.; Huang, H.; Li, K.; Li, J. Towards the unified principles for level 5 autonomous vehicles. Engineering-PRC 2021, 7, 1313–1325. [Google Scholar] [CrossRef]
- Meyer, M.A.; Sauter, L.; Granrath, C.; Hadj-Amor, H.; Andert, J. Simulator coupled with distributed co-simulation protocol for automated driving Tests. Automot. Innov. 2021, 4, 373–389. [Google Scholar] [CrossRef]
- Ndikumana, A.; Tran, N.H.; Kim, K.T.; Hong, C.S. Deep learning based caching for self-driving cars in multi-access edge computing. IEEE T. Intell. Transp. 2020, 22, 2862–2877. [Google Scholar] [CrossRef]
- Liu, Y.; Yu, H.; Xie, S.; Zhang, Y. Deep reinforcement learning for offloading and resource allocation in vehicle edge computing and networks. IEEE T. Veh. Technol. 2019, 68, 11158–11168. [Google Scholar] [CrossRef]
- Cao, Y.; Wang, N.; Xiao, C.; Yang, D.; Fang, J.; Yang, R.; Chen, Q.A.; Li, B. Invisible for both camera and lidar: Security of multi-sensor fusion-based perception in autonomous driving under physical-world attacks. In Proceedings of the 2021 IEEE Symposium on Security and Privacy, San Francisco, CA, USA, 24–27 May 2021. [Google Scholar]
- Mou, L.; Xie, H.; Mao, S.; Zhao, P.; Chen, Y. Vision-based vehicle behaviour analysis: A structured learning approach via convolutional neural networks. IET Intell. Transp. Sy. 2020, 14, 792–801. [Google Scholar] [CrossRef]
- Li, W.; Yao, N.; Shi, Y.; Nie, W.; Zhang, Y.; Li, X.; Liang, J.; Chen, F.; Gao, Z. Personality openness predicts driver trust in automated driving. Automot. Innov. 2020, 3, 3–13. [Google Scholar] [CrossRef]
- Xue, D.; Cheng, J.; Zhao, X.; Wang, Z. A vehicle-in-the-loop simulation test based digital-twin for intelligent vehicles. In Proceedings of the 2021 IEEE Intl Conf on Dependable, Autonomic and Secure Computing, Intl Conf on Pervasive Intelligence and Computing, Intl Conf on Cloud and Big Data Computing, Intl Conf on Cyber Science and Technology Congress, AB, Canada, 25–28 October 2021. [Google Scholar]
- Sun, S.; Zhang, Y.D. 4D automotive radar sensing for autonomous vehicles: A sparsity-oriented approach. IEEE J-STSP 2021, 15, 879–891. [Google Scholar] [CrossRef]
- Wang, H.; Wang, C.; Xie, L. Lightweight 3-D localization and mapping for solid-state LiDAR. IEEE Robot. Autom. Let. 2021, 6, 1801–1807. [Google Scholar] [CrossRef]
- Bjelica, M.Z.; Lukac, Z. Central vehicle computer design: Software taking over. IEEE Consum. Electron. Mag. 2019, 8, 84–90. [Google Scholar] [CrossRef]
- Ni, J.; Hu, J.; Xiang, C. An AWID and AWIS X-by-wire UGV: Design and hierarchical chassis dynamics control. IEEE T. Intell. Transp. 2018, 20, 654–666. [Google Scholar] [CrossRef]
- Clements, L.M.; Kockelman, K.M. Economic effects of automated vehicles. Transport. Res. Rec. 2017, 2606, 106–114. [Google Scholar] [CrossRef]
- Grube, T.; Kraus, S.; Reul, J.; Stolten, D. Passenger car cost development through 2050. Transport. Res. D-Tr E 2021, 101, 103–110. [Google Scholar] [CrossRef]
- Zerfowski, D.; Buttle, D. Paradigm shift in the market for automotive software. ATZ Worldw. 2019, 121, 28–33. [Google Scholar] [CrossRef]
- Khan, J.A.; Khan, S.U.R.; Khan, T.A.; Khan, I.U.R. An amplified COCOMO-II based cost estimation model in global software development context. IEEE Access 2021, 9, 88602–88620. [Google Scholar] [CrossRef]
- Egil, J. Projections for Rising Auto Software Cost for Carmakers. EE Times. Available online: https://www.eetimes.com/projections-for-rising-auto-software-cost-for-carmakers/ (accessed on 17 March 2023).
- Shi, Y.; Zhang, Q.; He, A.; Pan, A.; Zhang, M.; Li, C.; Liao, Q.; Yang, X.; Wang, Z. A real-world investigation into usage patterns of electric vehicles in Shanghai. J. Energy Storage 2020, 32, 10–25. [Google Scholar] [CrossRef]
- Harms, I.M.; Bingen, L.; Steffens, J. Addressing the awareness gap: A combined survey and vehicle registration analysis to assess car owners’ usage of ADAS in fleets. Transport. Res. A-Pol. 2020, 134, 65–77. [Google Scholar] [CrossRef]
- Lazaroiu, G.; Machová, V.; Kucera, J. Connected and autonomous vehicle mobility: Socially disruptive technologies, networked transport systems, and big data algorithmic analytics. Contemp. Read. Law Soc. Justice 2020, 12, 61. [Google Scholar]
- Kaiser, C.; Festl, A.; Pucher, G.; Fellmann, M.; Stocker, A. The vehicle data value chain as a lightweight model to describe digital vehicle services. In Proceedings of the 15th International Conference on Web Information Systems and Technologies, Vienna, Austria, 18–20 September 2019. [Google Scholar]
- Ding, Y.; Li, R.; Wang, X.; Schmid, J.; Axhausen, K.W. Heterogeneity of autonomous vehicle adoption behavior due to peer effects and prior-av knowledge. Transportation 2022, 49, 1837–1860. [Google Scholar] [CrossRef]
- Yue, L.; Abdel-Aty, M.A.; Wu, Y.; Farid, A. The practical effectiveness of advanced driver assistance systems at different roadway facilities: System limitation, adoption, and usage. IEEE T. Intell. Transp. 2019, 21, 3859–3870. [Google Scholar] [CrossRef]
- Kuang, X.; Zhao, F.; Hao, H.; Liu, Z. Assessing the socioeconomic impacts of intelligent connected vehicles in China: A cost–benefit analysis. Sustainability 2019, 11, 3273. [Google Scholar] [CrossRef]
- Huang, N.; Jack, W. Tesla Rumored to Reintroduce MMWave Radar. Digitimes. Available online: https://www.digitimes.com/news/a20230117PD203/4d-imaging-radar-adas-mmwave-radar-tesla.html (accessed on 17 March 2023).
- Power, J.D. Consumers in China Are More Confident About Self-Driving Technologies by Chinese Companies. Global Times. Available online: https://china.jdpower.com/resources/china-self-driving-confidence-index (accessed on 17 March 2023).
- Athanasopoulou, A.; Reuver, M.; Nikou, S.; Bouwman, H. What technology enabled services impact business models in the automotive industry? An exploratory study. Futures 2019, 109, 73–83. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Components |
|---|---|
| Sensors |
|
| Computers |
|
| Actuators |
|
| Communicators |
|
| Attribute | Constraint Principle |
|---|---|
| Technical compatibility |
|
| Technical coherence |
|
| Technical reusability |
|
| Technical substitution |
|
| Component | L-FSV | L-FSM | M1-FSV | M1-FSM | M1-SSV | M1-SSM | M2-SSV | M2-SSM | H-SSV | H-SSM | H-SCV | H-SCM |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Camera | 9*2 MP | 5*2 MP | 13*2 MP 3*8 MP | 6*2 MP 3*8 MP | 7*2 MP 3*8 MP | 5*2 MP 2*8 MP | 12*2 MP 3*8 MP | 5*2 MP 2*8 MP | 8*2 MP 4*8 MP 2*12 MP | 4*2 MP 1*8 MP 2*12 MP | 6*2 MP 3*8 MP 2*12 MP | 4*2 MP 1*8 MP 2*12 MP |
| MMW radar | — | 4*short-range | — | 2*long-range 4*short-range | — | 1*long-range 4*short-range | — | 1*4D-imaging 1*long-range 4*short-range | — | 1*4D-imaging 2*long-range 4*short-range | — | 2*long-range 4*short-range |
| Lidar | — | — | — | 1*mechanical | — | 1*mechanical | — | 1*mechanical 2*hybrid-solid | — | 2*hybrid-solid 4*solid-state | — | 2*solid-state |
| Ultrasonic radar | 12 | 8 | 12 | 8 | 12 | 8 | 12 | 4 | — | — | — | — |
| HD-Map | 1*meter-level | 1*meter-level | 1*meter-level | 1*meter-level | 1*meter-level | 1*meter-level | 1*decimeter-level | 1*decimeter-level | 1*centimeter-level | 1*centimeter-level | 1*centimeter-level | 1*centimeter-level |
| MEMS | 2 | 2 | 3 | 3 | 3 | 3 | 3 | 3 | 4 | 4 | 4 | 4 |
| Computer | 3*ECU | 3*ECU | 3*ECU | 3*ECU | 2*DCU | 2*DCU | 2*DCU | 2*DCU | 1*central (256 TOPS) | 1*central (1024 TOPS) | 1*central (128 TOPS) | 1*central (256 TOPS) |
| Actuators | 1*electric power steering 1*electric power braking | 1*electric power steering 1*electric power braking | 1*wire-controlled steering 1*wire-controlled braking | 1*wire-controlled steering 1*wire-controlled braking | 1*wire-controlled steering 1*wire-controlled braking | 1*wire-controlled steering 1*wire-controlled braking | 1.5*wire-controlled steering 1.5*wire-controlled braking | 1.5*wire-controlled steering 1.5*wire-controlled braking | 2*wire-controlled steering 2*wire-controlled braking | 2*wire-controlled steering 2*wire-controlled braking | 2*wire-controlled steering 2*wire-controlled braking | 2*wire-controlled steering 2*wire-controlled braking |
| Communicator | 4G-V2X | 4G-V2X | 4G-V2X | 4G-V2X | 4G-V2X | 4G-V2X | 4G-V2X | 4G-V2X | 4G-V2X | 4G-V2X | 5G-V2X | 5G-V2X |
| Components | 2021 | 2025 | 2030 |
|---|---|---|---|
| Camera (2 MP) | $33, 10 W | $31, 8 W | $30, 6 W |
| Camera (8 MP) | $93, 15 W | $86, 12 W | $78, 10 W |
| Camera (12 MP) | $148, 20 W | $120, 16 W | $93, 12 W |
| MMW (short-range) | $76, 5 W | $73, 4 W | $69, 3 W |
| MMW (long-range) | $140, 12 W | $130, 10 W | $117, 8 W |
| MMW (4D-imaging) | $312, 20 W | $204, 18 W | $121, 16 W |
| Lidar (mechanical) | $2836, 45 W | $1866, 40 W | $1104, 36 W |
| Lidar (hybrid-solid) | $933, 40 W | $760, 35 W | $588, 32 W |
| Lidar (solid-state) | $560, 35 W | $367, 32 W | $216, 30 W |
| MEMS | $3, 1 W | $2.8, 1 W | $2.7, 1 W |
| Ultrasonic radar | $24, 12 W | $23, 11 W | $22, 10 W |
| HD map (m) | $343, 1 W | $279, 1 W | $216, 1 W |
| HD map (dm) | $1104, 2 W | $957, 2 W | $740, 2 W |
| HD map (cm) | $2015, 4 W | $1858, 4 W | $1433, 3 W |
| T-Box (4G-V2X) | $21, 4 W | $17, 4 W | $13, 4 W |
| T-Box (5G-V2X) | $93, 8 W | $61, 8 W | $36, 8 W |
| Electric power steering | $224, 40 W | $215, 40 W | $204, 40 W |
| Electric power braking | $179, 50 W | $172, 50 W | $164, 50 W |
| Wire-controlled steering | $522, 70 W | $482, 70 W | $436, 70 W |
| Wire-controlled braking | $373, 80 W | $343, 80 W | $310, 80 W |
| Computer (<100 TOPS) | $7.5, 1 W/TOPS | $6, 0.4 W/TOPS | $4.5, 0.17 W/TOPS |
| Computer (100–500 TOPS) | $2.8, 1 W/TOPS | $2.2, 0.4 W/TOPS | $1.8, 0.17 W/TOPS |
| Computer (>500 TOPS) | $1.5, 1 W/TOPS | $1.2, 0.4 W/TOPS | $0.9, 0.17 W/TOPS |
| TCO Composition | Low-Level | Medium-Level | High-Level |
|---|---|---|---|
| Hardware | 70.1–71.7% | 56.9–63.3% | 52.3–55.3% |
| Software | 14.1–16.9% | 13.6–21.3% | 12.9–18.0% |
| Data Traffic | 1.1–1.3% | 1.2–4.2% | 5.9–10.5% |
| Power Consumption | 3.2–4.4% | 4.9–10.7% | 7.4–8.3% |
| Maintenance | 8.6–8.7% | 11.2–12.2% | 13.6–14.3% |
| TCO Composition | M1-FSV | M1-SSV | M2-SSV | M1-FSM | M1-SSM | M2-SSM |
|---|---|---|---|---|---|---|
| Hardware | $2361 | $2083 | $3371 | $5027 | $4530 | $7737 |
| Software | $670 | $462 | $765 | $1884 | $1353 | $2337 |
| Data Traffic | $143 | $143 | $143 | $143 | $143 | $143 |
| Power Consumption | $437 | $323 | $423 | $752 | $420 | $609 |
| Maintenance | $455 | $382 | $620 | $1037 | $883 | $1511 |
| TCO Composition | H-SSV | H-SCV | H-SSM | H-SCM |
|---|---|---|---|---|
| Hardware | $3970 | $3642 | $6679 | $4559 |
| Software | $923 | $1004 | $2017 | $1570 |
| Data Traffic | $714 | $714 | $714 | $714 |
| Power Consumption | $596 | $541 | $985 | $641 |
| Maintenance | $979 | $929 | $1739 | $1226 |
| TCO Composition | L-FSV | L-FSM | M1-SSV | M1-SSM | H-SSV | H-SSM |
|---|---|---|---|---|---|---|
| Hardware | $1547 | $1756 | $2083 | $4530 | $3970 | $6679 |
| Software | $304 | $422 | $462 | $1353 | $923 | $2017 |
| Data Traffic | $29 | $29 | $143 | $143 | $714 | $714 |
| Power Consumption | $94 | $79 | $323 | $420 | $596 | $985 |
| Maintenance | $185 | $218 | $382 | $883 | $979 | $1739 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Z.; Zhang, W.; Tan, H.; Zhao, F. Feature Identification, Solution Disassembly and Cost Comparison of Intelligent Driving under Different Technical Routes. Appl. Sci. 2023, 13, 4361. https://doi.org/10.3390/app13074361
Liu Z, Zhang W, Tan H, Zhao F. Feature Identification, Solution Disassembly and Cost Comparison of Intelligent Driving under Different Technical Routes. Applied Sciences. 2023; 13(7):4361. https://doi.org/10.3390/app13074361
Chicago/Turabian StyleLiu, Zongwei, Wang Zhang, Hong Tan, and Fuquan Zhao. 2023. "Feature Identification, Solution Disassembly and Cost Comparison of Intelligent Driving under Different Technical Routes" Applied Sciences 13, no. 7: 4361. https://doi.org/10.3390/app13074361
APA StyleLiu, Z., Zhang, W., Tan, H., & Zhao, F. (2023). Feature Identification, Solution Disassembly and Cost Comparison of Intelligent Driving under Different Technical Routes. Applied Sciences, 13(7), 4361. https://doi.org/10.3390/app13074361