
A Cognitive Environment Modeling Approach for Autonomous Vehicles: A Chinese Experience


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
1.1. Background
1.2. Related Works
1.3. Motivations and Contributions
1.4. Organization
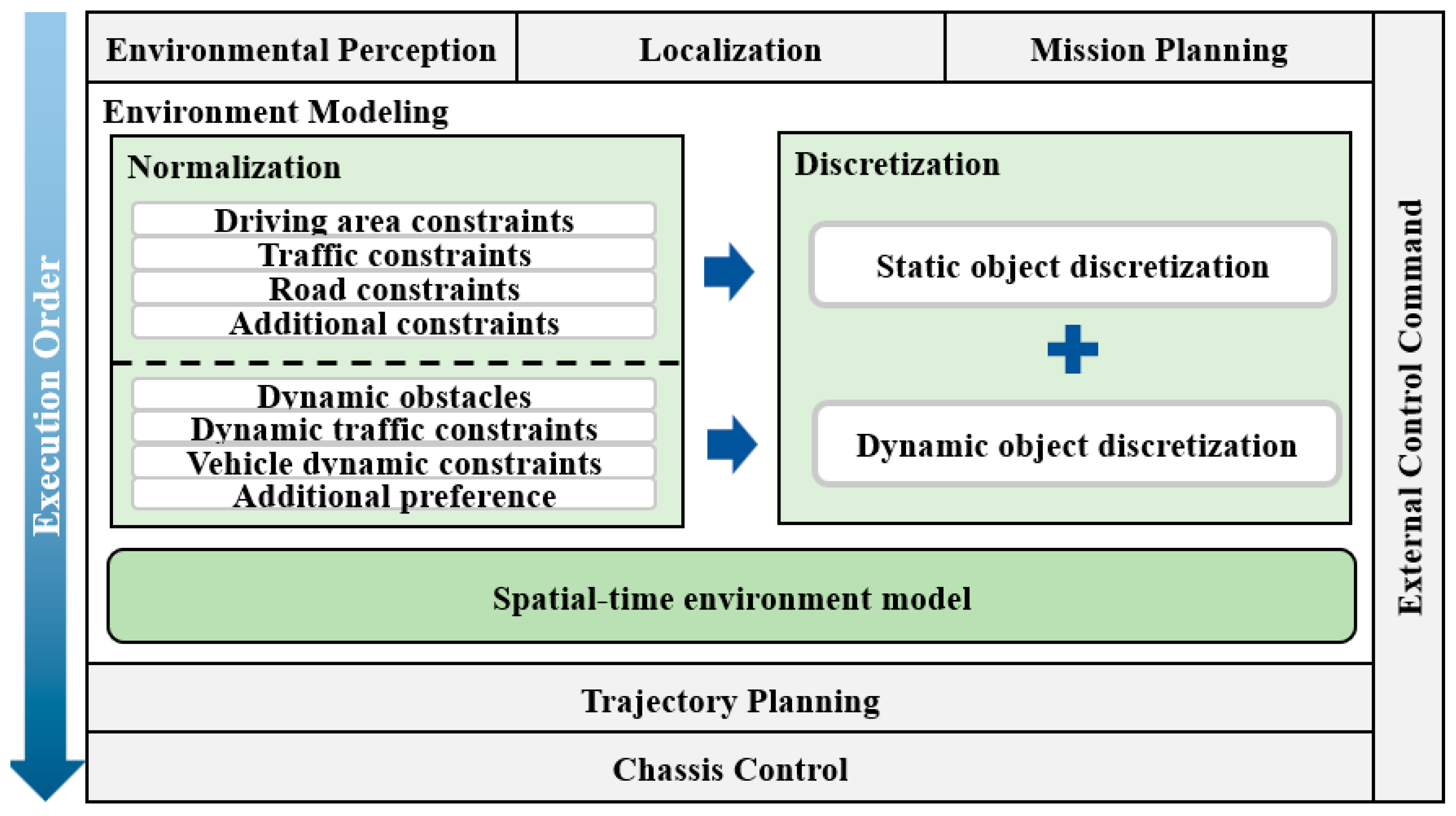
2. System Architecture
3. Spatial–Time Environment Model Statement
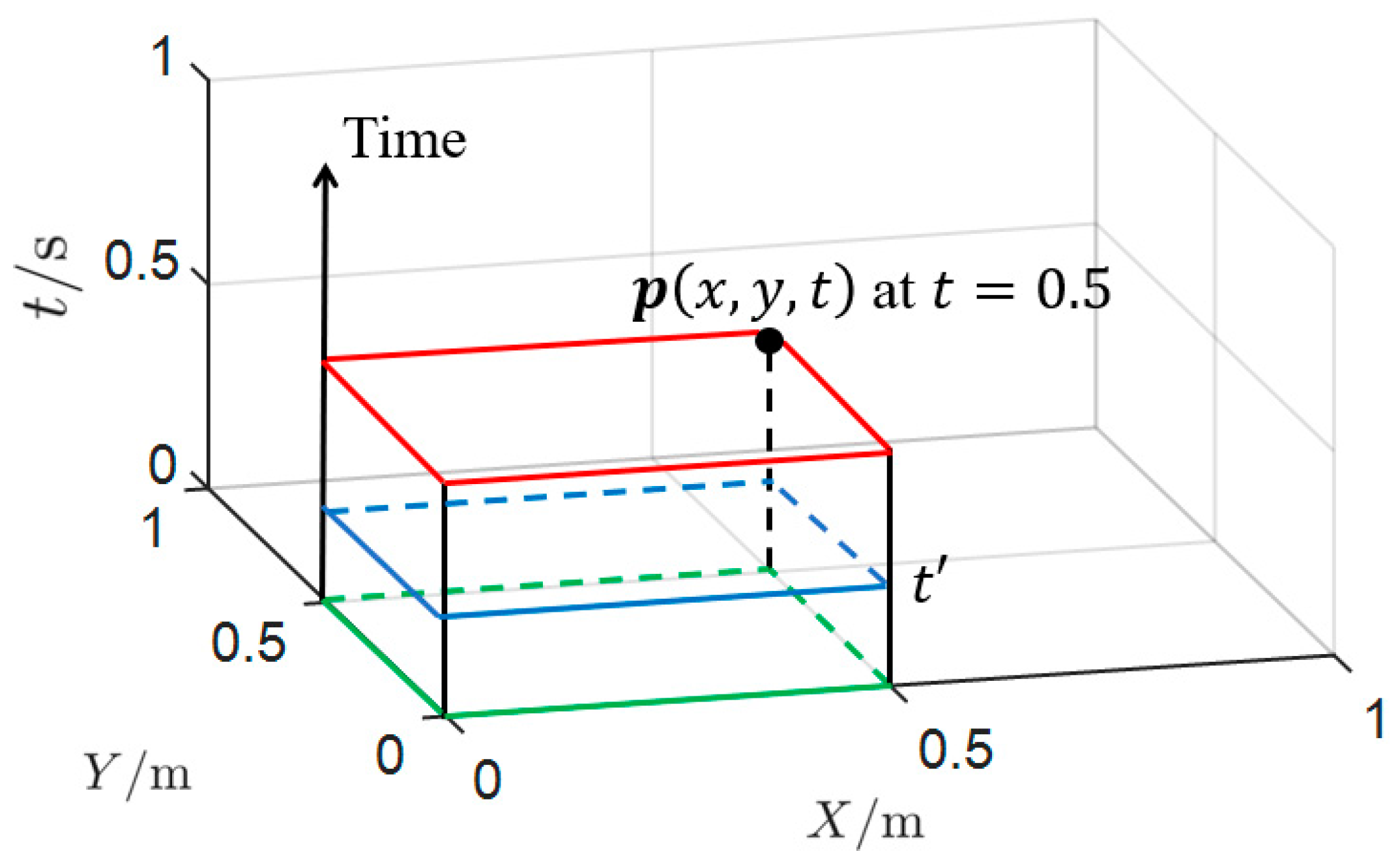
3.1. Definition
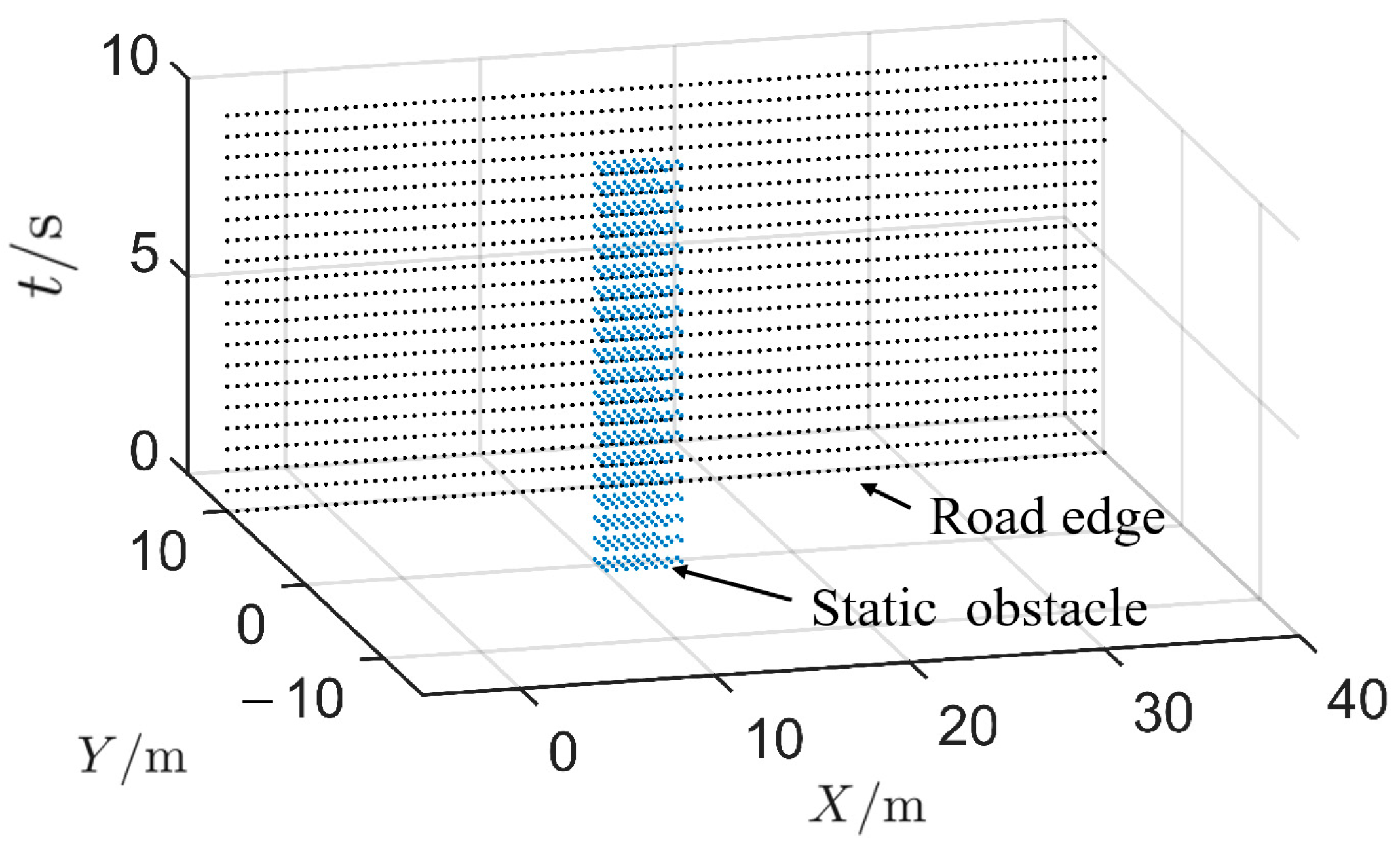
3.2. Static Object Discretization
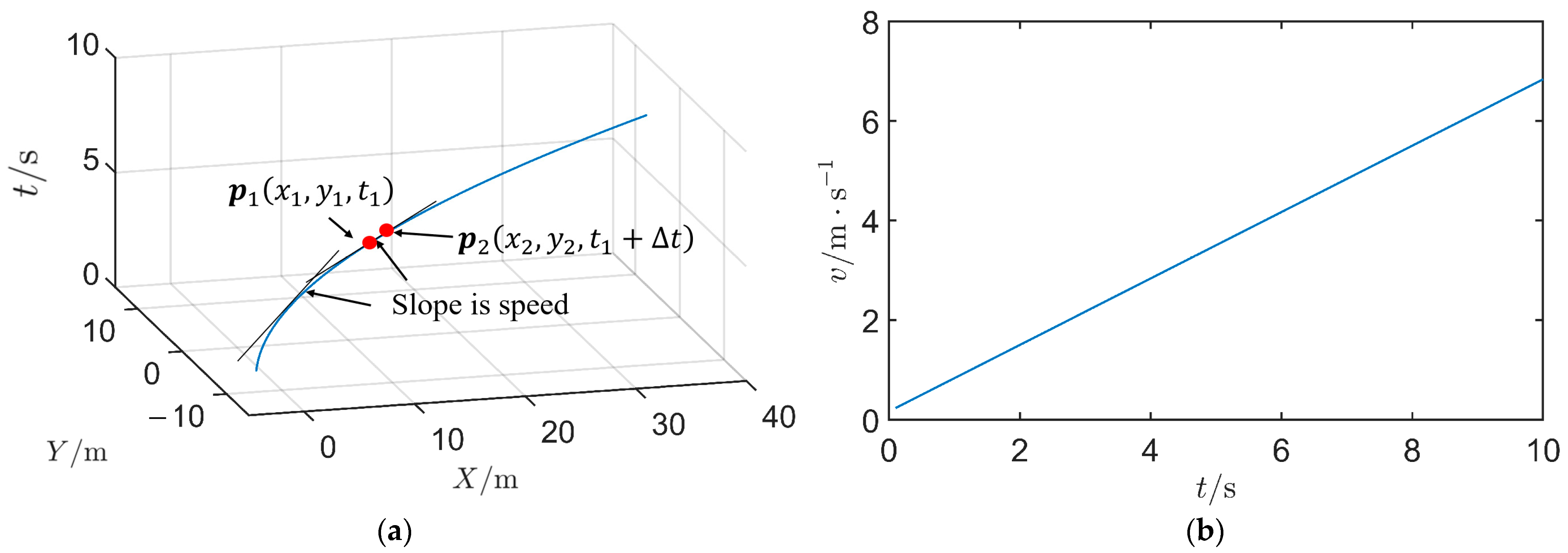
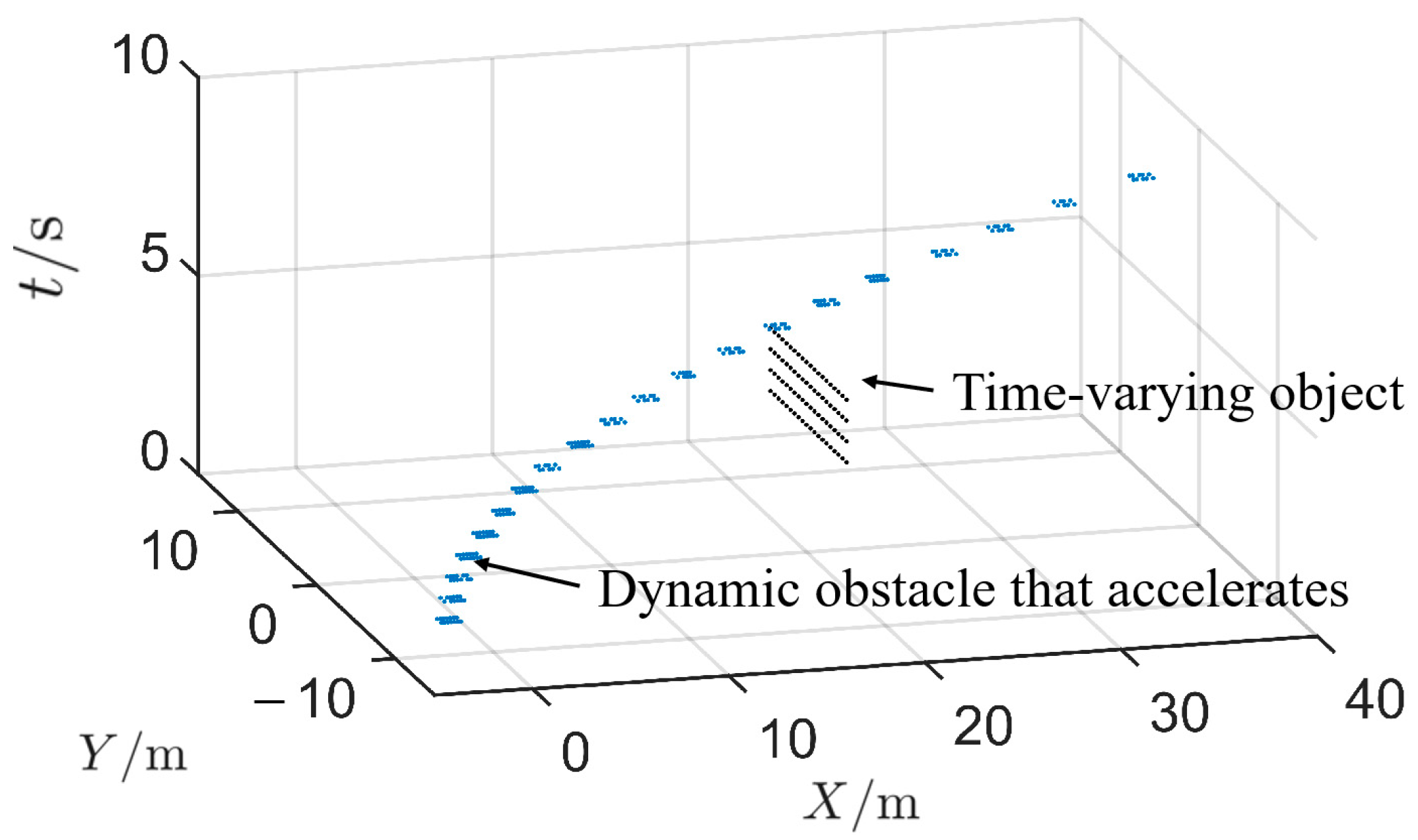
3.3. Dynamic Object Discretization
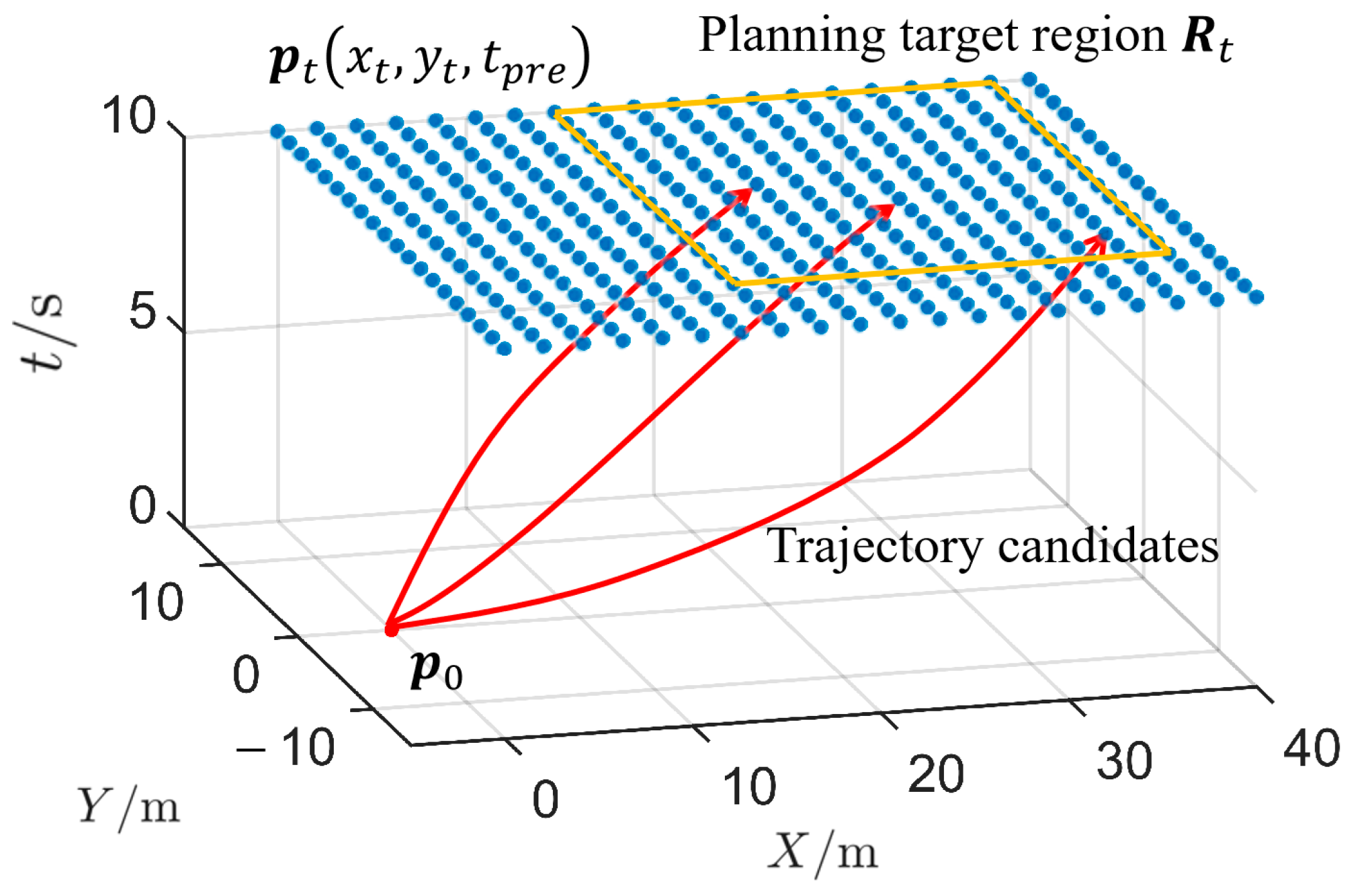
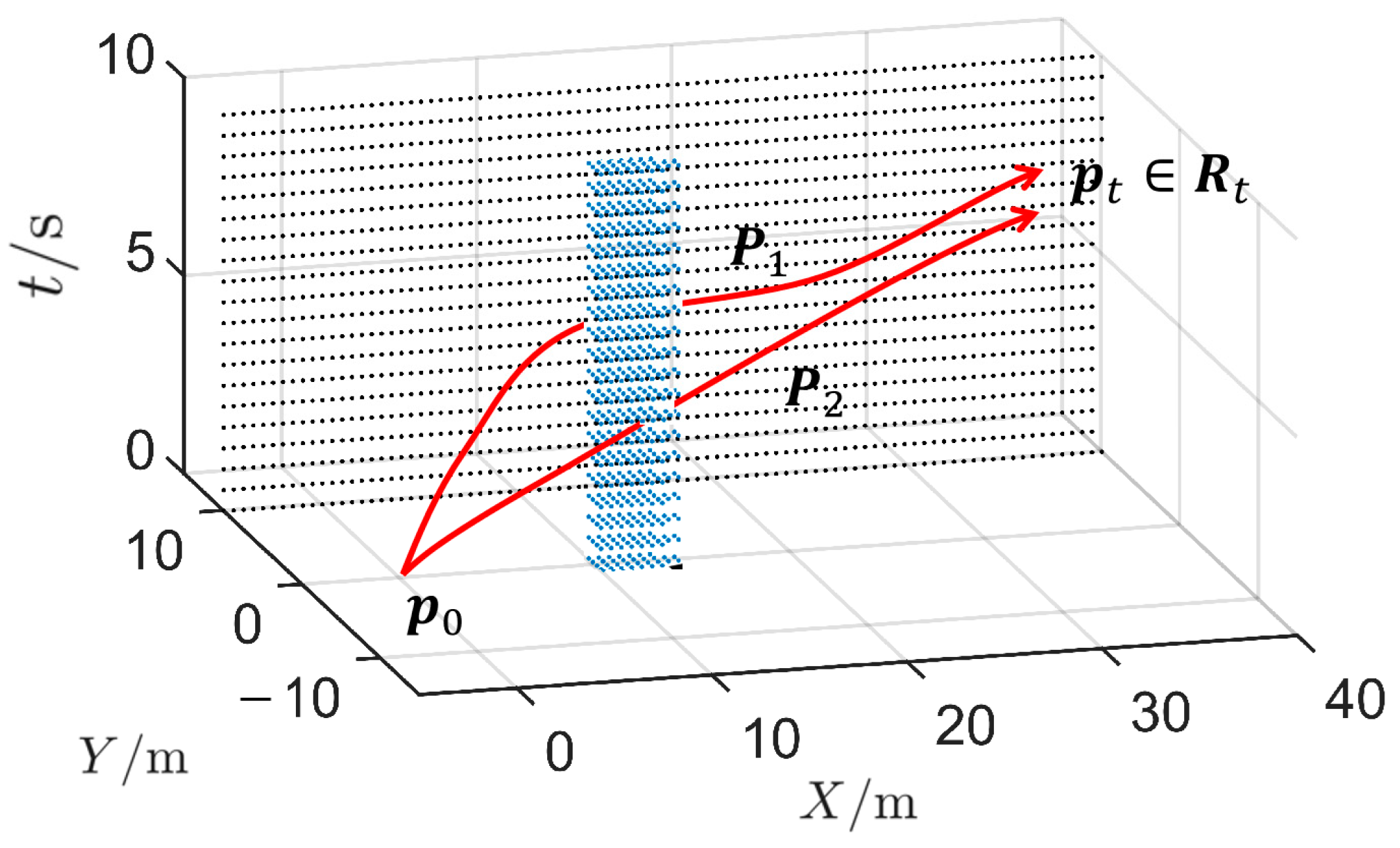
3.4. Trajectory Planning Problem Statement in the Spatial–Time Environment Model
3.5. Collision Checking
3.6. Cost Assessment Model
4. Scenario Compatibility
4.1. Static Obstacle Avoidance Scenario
4.2. Dynamic Overtaking Scenario
4.3. Dynamic Cut-in Scenario
4.4. Lane Merging Scenario
4.5. Unprotected Left Turns with Traffic
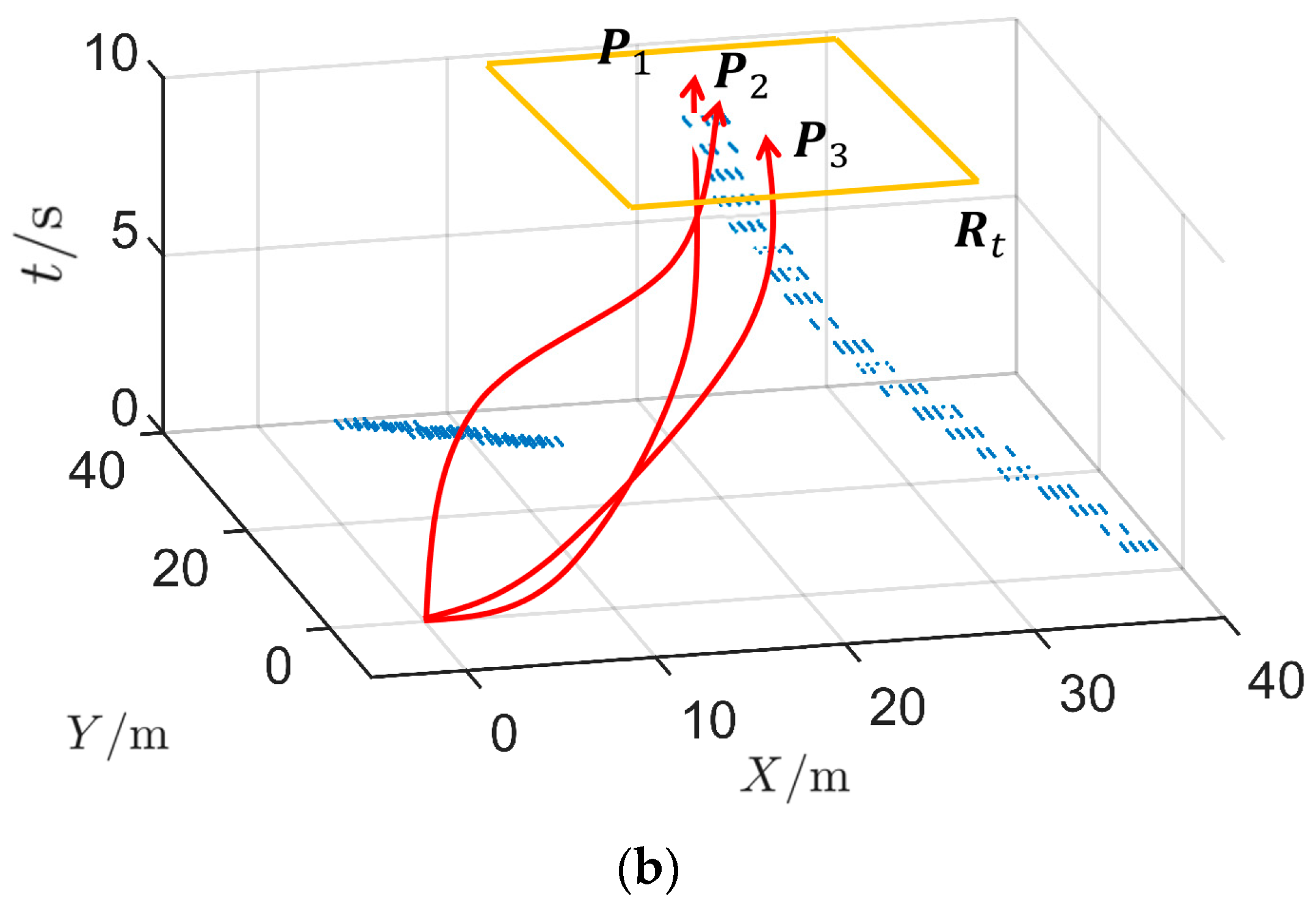
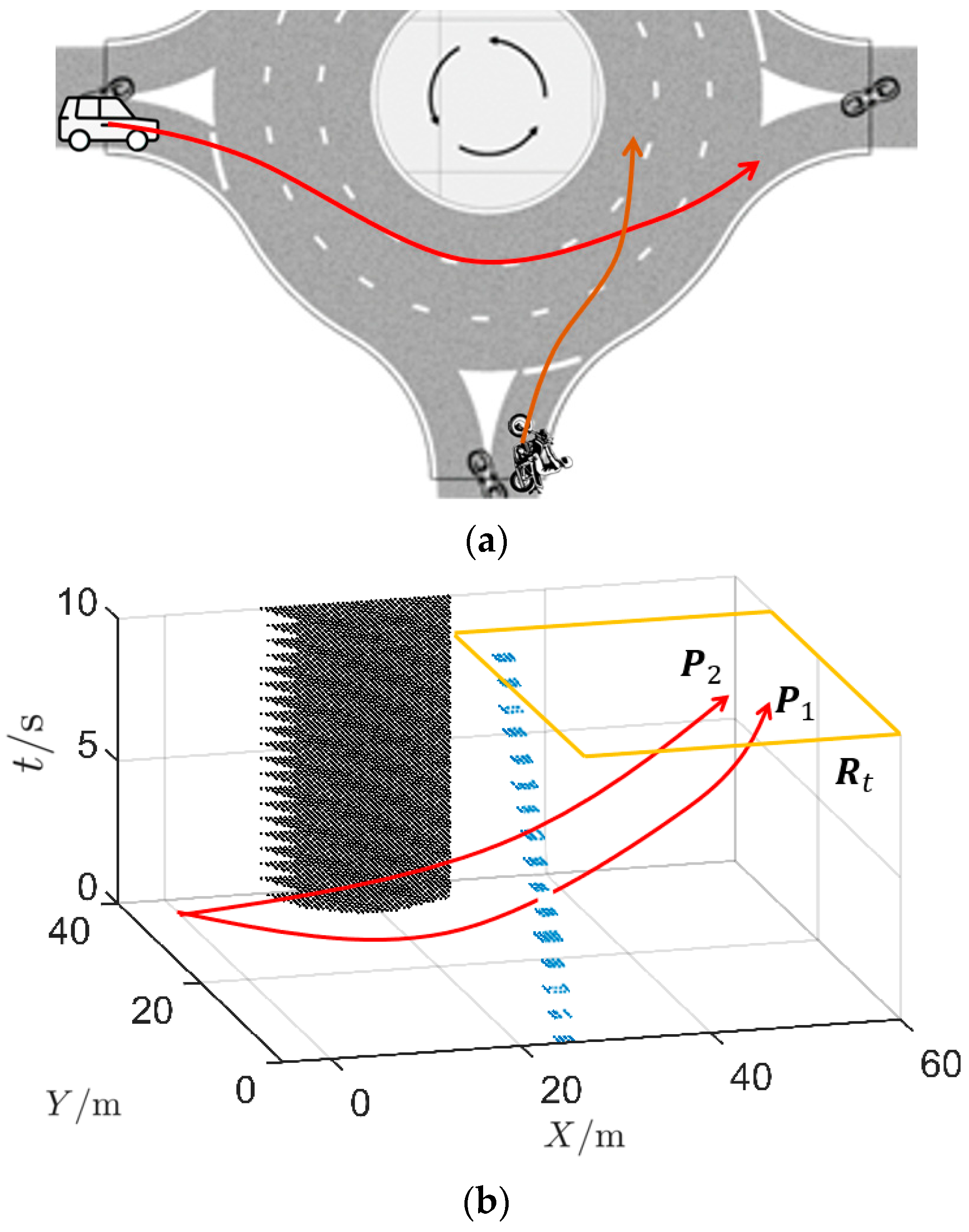
4.6. Roundabout Scenario
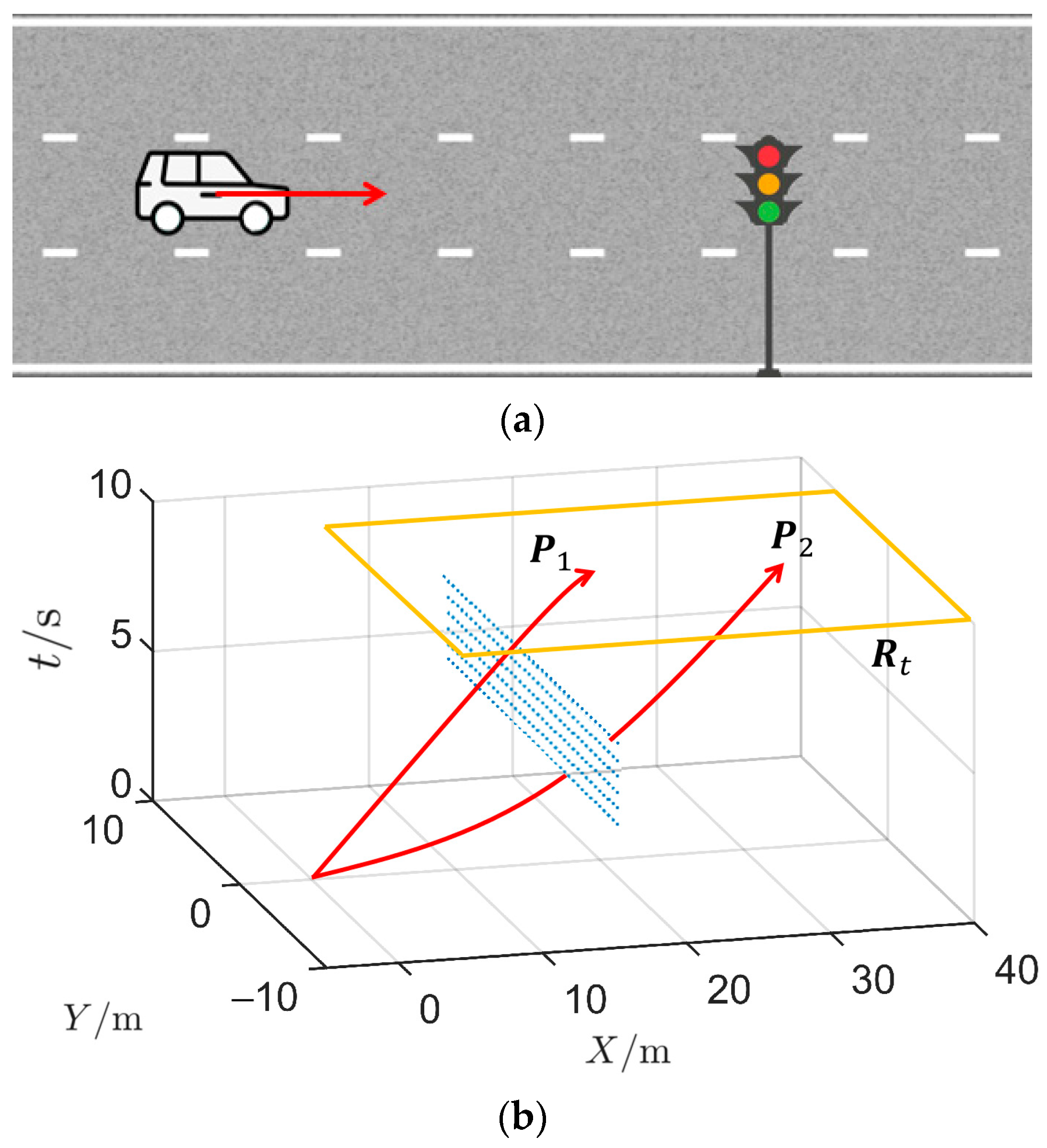
4.7. Traffic Light Traffic Scenario
5. Trajectory Planning Compatibility
5.1. Scenario 1
5.2. Scenario 2
5.3. Scenario 3
5.4. Scenario 4
5.5. Scenario 5
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Gonzalez, D.; Perez, J.; Milanes, V.; Nashashibi, F. A Review of Motion Planning Techniques for Automated Vehicles. IEEE Trans. Intell. Transp. Syst. 2016, 17, 1135–1145. [Google Scholar] [CrossRef]
- Yurtsever, E.; Lambert, J.; Carballo, A.; Takeda, K. A Survey of Autonomous Driving: Common Practices and Emerging Technologies. IEEE Access 2020, 8, 58443–58469. [Google Scholar] [CrossRef]
- Chu, Y.; Wu, Z.; Yue, Y.; Zhu, X.; Lim, E.G.; Paoletti, P. PK-APF: Path-Keeping Algorithm for USVs Based on Artificial Potential Field. Appl. Sci. 2022, 12, 8201. [Google Scholar] [CrossRef]
- Li, B.; Zhang, Y.; Shao, Z.; Jia, N. Simultaneous versus Joint Computing: A Case Study of Multi-Vehicle Parking Motion Planning. J. Comput. Sci. 2017, 20, 30–40. [Google Scholar] [CrossRef]
- Kim, D.J.; Lee, S.-H.; Chung, C.C. Object Vehicle Motion Prediction Based on Dynamic Occupancy Grid Map Utilizing Cascaded Support Vector Machine. In Proceedings of the 2019 19th International Conference on Control, Automation and Systems (ICCAS), Jeju, Korea, 15–18 October 2019; Volume 2019-Octob, pp. 496–500. [Google Scholar]
- Wang, J.; Wu, J.; Zheng, X.; Ni, D.; Li, K. Driving Safety Field Theory Modeling and Its Application in Pre-Collision Warning System. Transp. Res. Part C Emerg. Technol. 2016, 72, 306–324. [Google Scholar] [CrossRef]
- Jurecki, R.S.; Stańczyk, T.L. Modeling Driver’s Behaviour While Avoiding Obstacles. Appl. Sci. 2023, 13, 616. [Google Scholar] [CrossRef]
- Wahab, M.N.A.; Nefti-Meziani, S.; Atyabi, A. A Comparative Review On Mobile Robot Path Planning: Classical or Meta-Heuristic Methods? Annu. Rev. Control 2020, 50, 233–252. [Google Scholar] [CrossRef]
- Xin, Y.; Liang, H.; Mei, T.; Huang, R.; Du, M.; Sun, C.; Wang, Z.; Jiang, R. A New Occupancy Grid of the Dynamic Environment for Autonomous Vehicles. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014; pp. 787–792. [Google Scholar]
- Sedighi, S.; Nguyen, D.-V.; Kapsalas, P.; Kuhnert, K.-D. Implementing Voronoi-Based Guided Hybrid A* in Global Path Planning for Autonomous Vehicles. In Proceedings of the 2019 IEEE Intelligent Transportation Systems Conference (ITSC), Auckland, New Zealand, 27–30 October 2019; pp. 3845–3852. [Google Scholar]
- Ammar, A.; Bennaceur, H.; Châari, I.; Koubâa, A.; Alajlan, M. Relaxed Dijkstra and A* with Linear Complexity for Robot Path Planning Problems in Large-Scale Grid Environments. Soft Comput. 2016, 20, 4149–4171. [Google Scholar] [CrossRef]
- Li, B.; Ouyang, Y.; Li, L.; Zhang, Y. Autonomous Driving on Curvy Roads Without Reliance on Frenet Frame: A Cartesian-Based Trajectory Planning Method. IEEE Trans. Intell. Transp. Syst. 2022, 23, 15729–15741. [Google Scholar] [CrossRef]
- Hamid, U.Z.A.; Ariff, M.H.M.; Zamzuri, H.; Saito, Y.; Zakaria, M.A.; Rahman, M.A.A.; Raksincharoensak, P. Piecewise Trajectory Replanner for Highway Collision Avoidance Systems with Safe-Distance Based Threat Assessment Strategy and Nonlinear Model Predictive Control. J. Intell. Robot. Syst. 2018, 90, 363–385. [Google Scholar] [CrossRef]
- Jiang, Y.; Jin, X.; Xiong, Y.; Liu, Z. A Dynamic Motion Planning Framework for Autonomous Driving in Urban Environments. In Proceedings of the 2020 39th Chinese Control Conference (CCC), Shenyang, China, 27–29 July 2020; Volume 2020-July, pp. 5429–5435. [Google Scholar]
- Hu, J.; Chen, R.; Xu, W.; Lu, R. An Event-Triggered Real-Time Motion Planning Strategy for Autonomous Vehicles. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2022, 236, 10332–10348. [Google Scholar] [CrossRef]
- Hafeez, F.; Ullah Sheikh, U.; Mas’ud, A.A.; Al-Shammari, S.; Hamid, M.; Azhar, A. Application of the Theory of Planned Behavior in Autonomous Vehicle-Pedestrian Interaction. Appl. Sci. 2022, 12, 2574. [Google Scholar] [CrossRef]
- Zou, S.; Luan, Z.; Zhao, W.; Wang, C. Personalized Design Strategy of Vehicle Steer-by-Wire Characteristics Considering Driving Style. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2023, 237, 253–266. [Google Scholar] [CrossRef]
- Bergman, K.; Ljungqvist, O.; Axehill, D. Improved Path Planning by Tightly Combining Lattice-Based Path Planning and Optimal Control. IEEE Trans. Intell. Veh. 2021, 6, 57–66. [Google Scholar] [CrossRef]
- Li, B.; Kong, Q.; Zhang, Y.; Shao, Z.; Wang, Y.; Peng, X.; Yan, D. On-Road Trajectory Planning with Spatio-Temporal RRT* and Always-Feasible Quadratic Program. In Proceedings of the 2020 IEEE 16th International Conference on Automation Science and Engineering (CASE), Hong Kong, China, 20–21 August 2020; Volume 2020-Augus, pp. 942–947. [Google Scholar]
- Zong, C.; Han, X.; Zhang, D.; Liu, Y.; Zhao, W.; Sun, M. Research on Local Path Planning Based on Improved RRT Algorithm. Proc. Inst. Mech. Eng. Part D J. Automob. Eng. 2021, 235, 2086–2100. [Google Scholar] [CrossRef]
- Luo, J.; Li, S.; Li, H.; Xia, F. Intelligent Network Vehicle Driving Risk Field Modeling and Path Planning for Autonomous Obstacle Avoidance. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2022, 236, 8621–8634. [Google Scholar] [CrossRef]
- Fan, H.; Zhu, F.; Liu, C.; Zhang, L.; Zhuang, L.; Li, D.; Zhu, W.; Hu, J.; Li, H.; Kong, Q. Baidu Apollo EM Motion Planner. arXiv 2018, arXiv:1807.08048. [Google Scholar]
- Hidalgo, C.; Lattarulo, R.; Perez, J.; Asua, E. Hybrid Trajectory Planning Approach for Roundabout Merging Scenarios. In Proceedings of the 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), Graz, Austria, 4–8 November 2019; pp. 1–6. [Google Scholar]
- García Cuenca, L.; Puertas, E.; Fernandez Andrés, J.; Aliane, N. Autonomous Driving in Roundabout Maneuvers Using Reinforcement Learning with Q-Learning. Electronics 2019, 8, 1536. [Google Scholar] [CrossRef] [Green Version]
- Zhu, H.; Han, T.; Alhajyaseen, W.K.M.; Iryo-Asano, M.; Nakamura, H. Can Automated Driving Prevent Crashes with Distracted Pedestrians? An Exploration of Motion Planning at Unsignalized Mid-Block Crosswalks. Accid. Anal. Prev. 2022, 173, 106711. [Google Scholar] [CrossRef]
- Rahmati, Y.; Talebpour, A. Towards a Collaborative Connected, Automated Driving Environment: A Game Theory Based Decision Framework for Unprotected Left Turn Maneuvers. IEEE Intell. Veh. Symp. Proc. 2017, 1316–1321. [Google Scholar] [CrossRef]
- Mazare, M.; Asharioun, H.; Davoudi, E.; Mokhtari, M. Distributed Finite-Time Neural Network Observer-Based Consensus Tracking Control of Heterogeneous Underwater Vehicles. Ocean Eng. 2023, 272, 113882. [Google Scholar] [CrossRef]
- Chen, R.; Hu, J.; Xu, W. An RRT-Dijkstra-Based Path Planning Strategy for Autonomous Vehicles. Appl. Sci. 2022, 12, 11982. [Google Scholar] [CrossRef]
- Sheng, W.; Li, B.; Zhong, X. Autonomous Parking Trajectory Planning with Tiny Passages: A Combination of Multistage Hybrid A-Star Algorithm and Numerical Optimal Control. IEEE Access 2021, 9, 102801–102810. [Google Scholar] [CrossRef]



Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, R.; Hu, J.; Zhong, X.; Zhang, M.; Zhu, L. A Cognitive Environment Modeling Approach for Autonomous Vehicles: A Chinese Experience. Appl. Sci. 2023, 13, 3984. https://doi.org/10.3390/app13063984
Chen R, Hu J, Zhong X, Zhang M, Zhu L. A Cognitive Environment Modeling Approach for Autonomous Vehicles: A Chinese Experience. Applied Sciences. 2023; 13(6):3984. https://doi.org/10.3390/app13063984
Chicago/Turabian StyleChen, Ruinan, Jie Hu, Xinkai Zhong, Minchao Zhang, and Linglei Zhu. 2023. "A Cognitive Environment Modeling Approach for Autonomous Vehicles: A Chinese Experience" Applied Sciences 13, no. 6: 3984. https://doi.org/10.3390/app13063984
APA StyleChen, R., Hu, J., Zhong, X., Zhang, M., & Zhu, L. (2023). A Cognitive Environment Modeling Approach for Autonomous Vehicles: A Chinese Experience. Applied Sciences, 13(6), 3984. https://doi.org/10.3390/app13063984