
Armature Electromagnetic Force Extrapolation Prediction Method for Electromagnetic Railgun at High Speed


Abstract
:1. Introduction
2. Numerical Simulation of Armature Electromagnetic Force
- The rail is in good contact with the armature, ignoring the unevenness of the contact interface and material wear.
- The generation of molten aluminum at the interface during the launch will sharply reduce the sliding friction coefficient and tend to stabilize in order to simplify the calculation; it is assumed that it remains at a constant value of 0.11 throughout the launch process [18].
- The performance parameters of armature and rail materials (such as conductivity and relative permeability) are constant values during numerical simulation, and they do not change with time and temperature.
2.1. Governing Equation
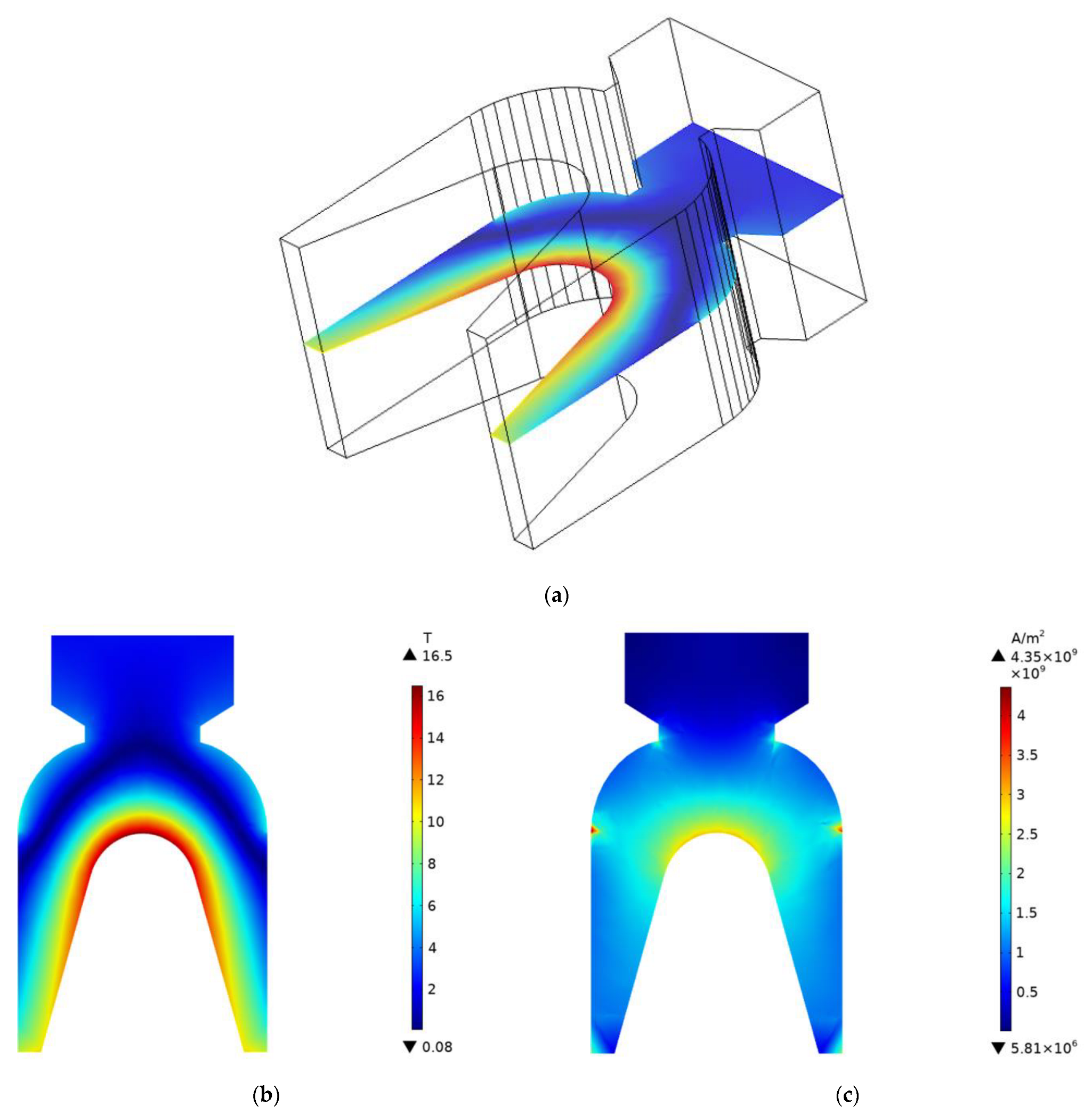
2.2. Finite Element Model
2.3. Dynamic Characteristics and Numerical Solution Stability of Armature Electromagnetic Force
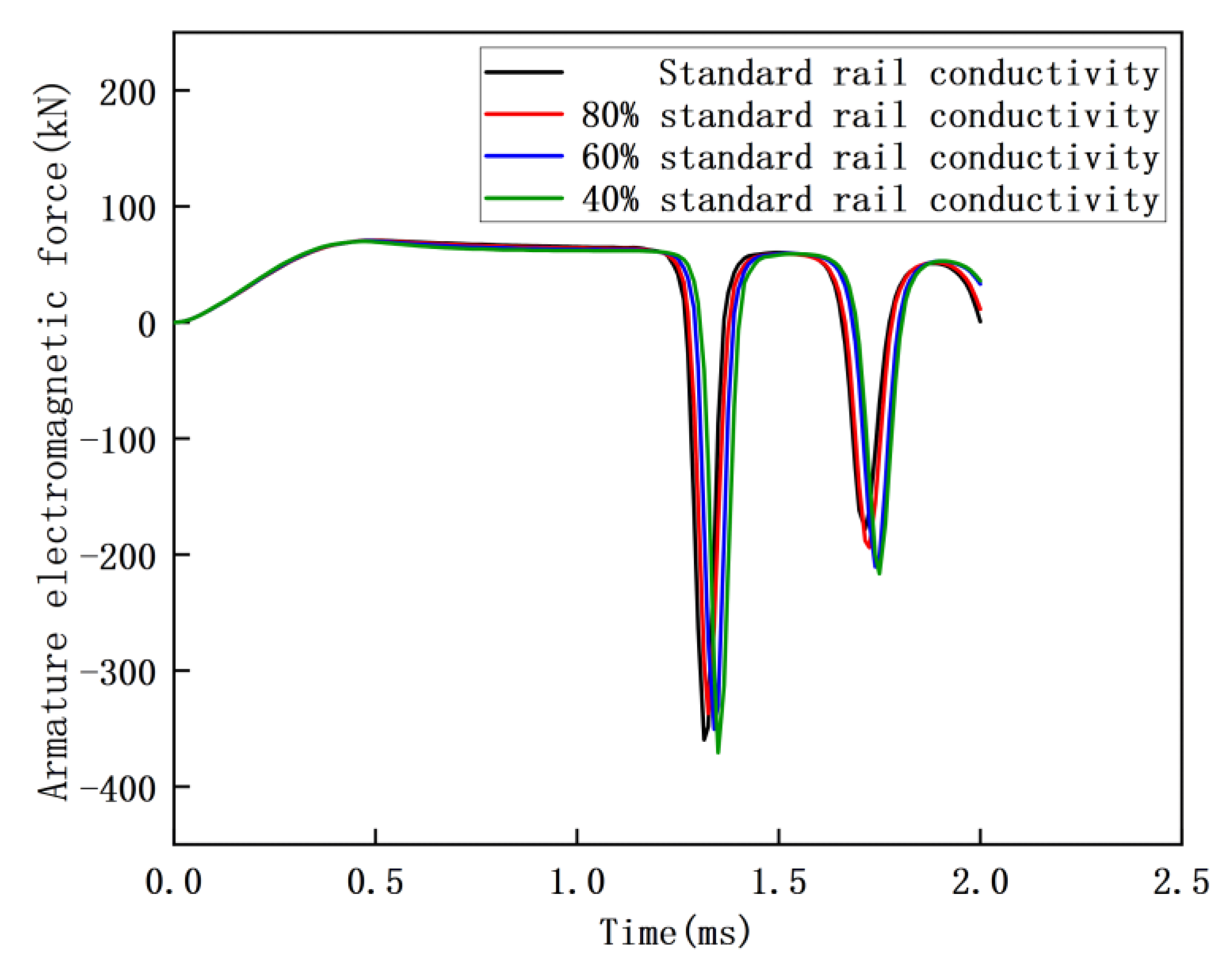
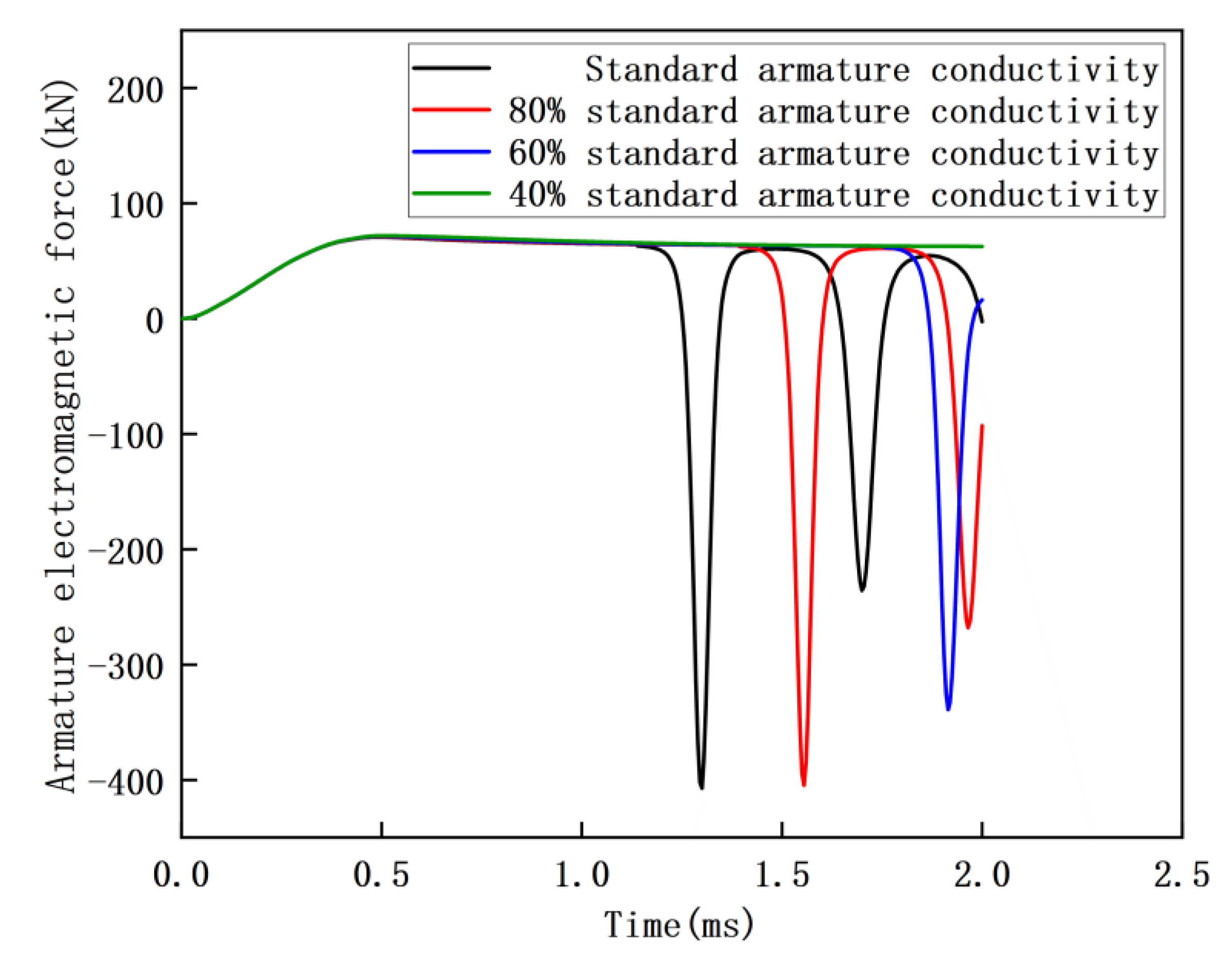
2.4. Electromagnetic Force with Different Conductivity
3. The Extrapolation Prediction Method
3.1. The Extrapolation Prediction Method Flow
- The armature electromagnetic force under a different conductivity is numerically simulated. According to the stability of the numerical solution, the numerical solution is divided into the stable stage and the “pseudo-oscillation” stage.
- For the stable stage, the simulation value of the armature electromagnetic force is extracted, and the sample data including the excitation current, time, velocity, armature conductivity, and electromagnetic force are obtained.
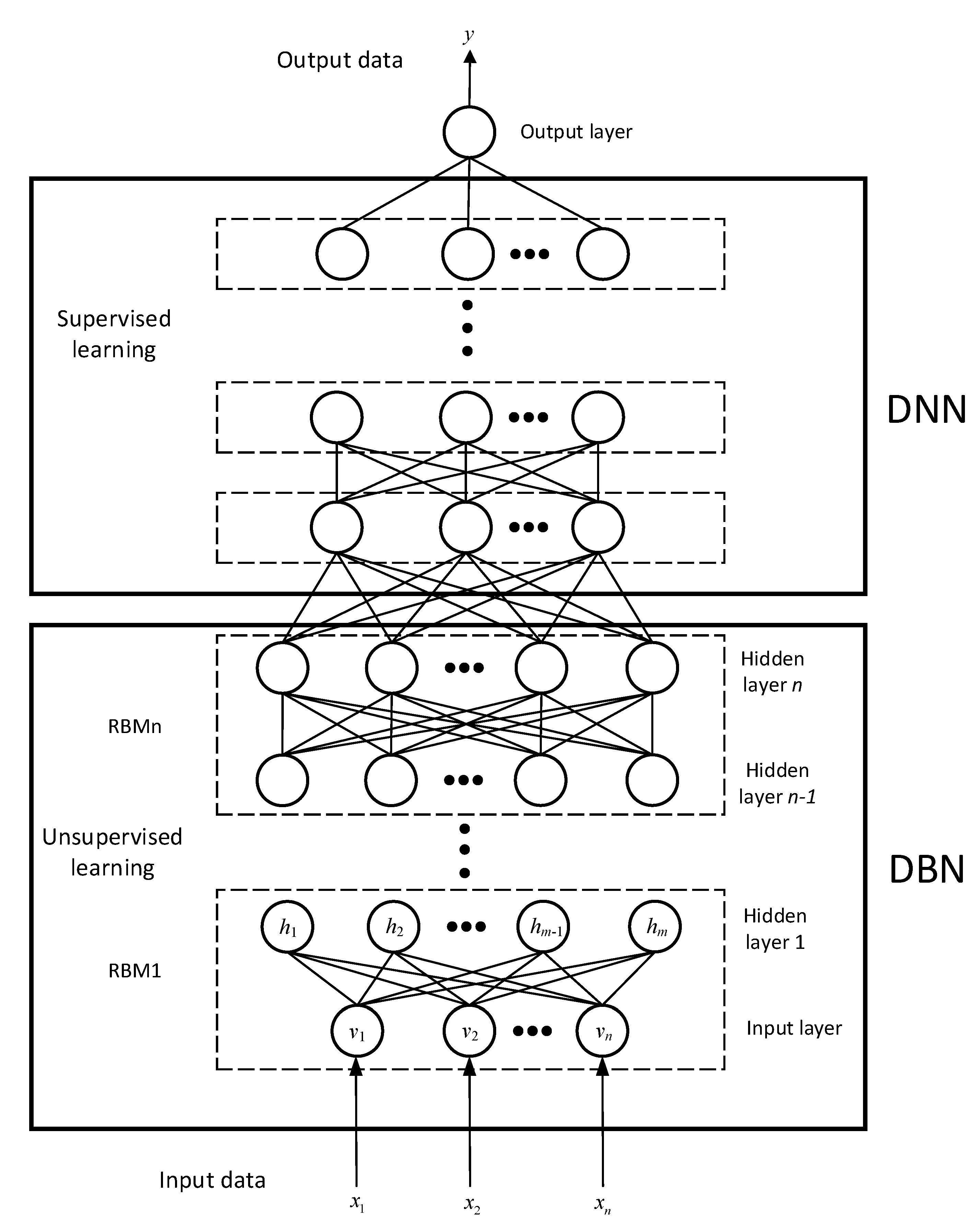
- For the “pseudo-oscillation” stage, the sample data obtained from the stability calculation stage under a different armature conductivity are used to train the DBN-DNN model with a good effect of the feature extraction and data prediction, and then the model prediction is used to obtain the extrapolation prediction value of the armature electromagnetic force of the “pseudo-oscillation” stage under the standard armature conductivity.
- For the comprehensive armature electromagnetic force of the whole launch process, the standard armature conductivity is obtained by superimposing the simulation value of the stability stage and the extrapolation prediction value of the “pseudo-oscillation” stage.
3.2. DBN-DNN
4. Case Analysis
4.1. Case 1
4.2. Case 2
4.3. Training Strategy
5. Conclusions
- Due to the influence of Pe, there exists the problem of “pseudo-oscillation” in solving the convection–diffusion equation of the electromagnetic railgun at high speed, and Pe is proportional to the armature velocity and armature conductivity.
- An extrapolation prediction method of the armature electromagnetic force at high speed is proposed, and the prediction accuracy of different models is compared to verify the advanced nature of the DBN-DNN extrapolation prediction model established in this paper.
- In the two cases, the difference between the calculated value of the armature exit velocity and the experimental measurement value is 0.85% and 1.03%, respectively, which can meet the needs of practical engineering calculation and verify the feasibility and correctness of extrapolation prediction.
- The training strategy of the DBN-DNN parameters is proposed when the armature electromagnetic force is transferred from a low conductivity to a standard conductivity, which ensures the prediction accuracy of the model and accelerates the training speed.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, H.; Li, S.; Gao, X.; Lu, T.; Liu, F. Distribution characteristics of electromagnetic field and temperature field of different caliber electromagnetic railguns. IEEE Trans. Plasma Sci. 2020, 48, 4342–4349. [Google Scholar] [CrossRef]
- Liu, Y.; Guo, W.; Zhang, T.; Su, Z.; Fan, W.; Zhang, H. Influence of contacting schemes on electromagnetic force and current density distribution in armature. IEEE Trans. Plasma Sci. 2019, 47, 2726–2735. [Google Scholar] [CrossRef]
- Rodger, D.; Leonard, P.; Eastham, J. Modelling electromagnetic rail launchers at speed using 3D finite elements. IEEE Trans. Magn. 1991, 27, 314–317. [Google Scholar] [CrossRef]
- Rodger, D.; Leonard, P. Modelling the electromagnetic performance of moving rail gun launchers using finite elements. IEEE Trans. Magn. 1993, 29, 496–498. [Google Scholar] [CrossRef]
- Yang, Y.; Dai, K.; Yin, Q.; Liu, P.; Yu, D.; Li, H.; Zhang, H. In-bore dynamic measurement and mechanism analysis of multi-physics environment for electromagnetic railguns. IEEE Access 2021, 9, 16999–17010. [Google Scholar] [CrossRef]
- Li, C.; Chen, L.; Wang, Z.; Ruan, J.; Wu, P.; He, J.; Xia, S. Influence of armature movement velocity on the magnetic field distribution and current density distribution in railgun. IEEE Trans. Plasma Sci. 2020, 48, 2308–2315. [Google Scholar] [CrossRef]
- Jin, L.; Gong, D.; Yang, Q.; Zhang, C. Characteristic analysis and verification of electromagnetic force for armature of the electromagnetic rail launcher. In Proceedings of the 2022 IEEE 20th Biennial Conference on Electromagnetic Field Computation (CEFC), Denver, CO, USA, 24–26 October 2022; pp. 1–2. [Google Scholar]
- Hsieh, K. A lagrangian formulation for mechanically, thermally coupled electromagnetic diffusive processes with moving conductors. IEEE Trans. Magn. 1995, 31, 604–609. [Google Scholar] [CrossRef]
- Hsieh, K. Hybrid FE/BE implementation on electromechanical systems with moving conductors. IEEE Trans. Magn. 2007, 43, 1131–1133. [Google Scholar] [CrossRef]
- Yang, F.; Zhai, X.; Zhang, X.; Liu, H. Dynamic multiphasic coupling analysis of electromagnetic orbit launcher. J. Proj. Rocket. Missiles Guid. 2021, 41, 20–24. [Google Scholar]
- Jin, L.; Lei, B.; Zhang, Q.; Zhu, R. Electromechanical performance of rails with different cross-section shapes in railgun. In Proceedings of the 2014 17th International Symposium on Electromagnetic Launch Technology, La Jolla, CA, USA, 7–11 July 2014; pp. 1–5. [Google Scholar]
- Jin, L.; Wang, F.; Yang, Q.; Wang, D.; Kou, X. Typical deep learning model and training method for performance analysis of permanent magnet synchronous motor. Trans. China Electrotech. Soc. 2018, 33, 41–48. [Google Scholar]
- Meng, H.; Xu, Z.; Yang, J.; Liang, B.; Cheng, J. Fast prediction of aerodynamic noise induced by the flow around a cylinder based on deep neural network. Chin. Phys. B 2022, 31, 545–550. [Google Scholar] [CrossRef]
- Yang, Y.; Zhao, J.; Song, J.; Dong, F.; He, Z.; Zong, K. Structural optimization of air-core permanent magnet synchronous linear motors based on deep neural network models. Proc. CSEE 2019, 39, 6085–6094. [Google Scholar]
- Tang, W.; Shan, T.; Dang, X.; Li, M.; Yang, F.; Xu, S.; Wu, J. Study on a Poisson’s equation solver based on deep learning technique. In Proceedings of the 2017 IEEE Electrical Design of Advanced Packaging and Systems Symposium (EDAPS), Haining, China, 14–16 September 2017; pp. 1–3. [Google Scholar]
- Khan, A.; Ghorbanian, V.; Lowther, D. Deep learning for magnetic field estimation. IEEE Trans. Magn. 2019, 55, 7202304. [Google Scholar] [CrossRef]
- Khan, A.; Mohammadi, M.; Ghorbanian, V.; Lowther, D. Efficiency map prediction of motor drives using deep learning. IEEE Trans. Magn. 2020, 56, 7511504. [Google Scholar] [CrossRef]
- Yang, K.; Kim, S.; Lee, B.; An, S. Electromagnetic launch experiments using a 4.8-MJ pulsed power supply. IEEE Trans. Plasma Sci. 2015, 43, 1358–1361. [Google Scholar] [CrossRef]
- Zhang, Y.; Lu, J.; Tan, S.; Li, B.; Wu, H.; Jiang, Y. Heat generation and thermal management of a rapid-fire electromagnetic rail launcher. IEEE Trans. Plasma Sci. 2019, 47, 2143–2150. [Google Scholar] [CrossRef]
- Fan, W.; Jiang, Y.; Wang, Y.; Liu, W.; Su, Z. Thermal measurement experiments and transient temperature distribution of rapid-fire augmented electromagnetic railgun. IEEE Trans. Plasma Sci. 2022, 50, 1351–1359. [Google Scholar]
- Wen, Y.; Dai, L.; Lin, F. Effect of geometric parameters on equivalent load and efficiency in rectangular bore railgun. IEEE Trans. Plasma Sci. 2021, 49, 1428–1433. [Google Scholar] [CrossRef]
- Ruan, J.; Zhang, Y.; Wang, D.; Shu, S.; Qiu, Z. Numerical simulation research and applications of electromagnetic multiphysical field for electrical equipment. High Volt. Eng. 2020, 46, 739–756. [Google Scholar]
- Hinton, G. Training products of experts by minimizing contrastive divergence. Neural Comput. 2002, 14, 1771–1800. [Google Scholar] [CrossRef]
- Jiang, L.; Zhang, Z. Research on image classification algorithm based on Pytorch. J. Phys. Conf. Ser. 2021, 2010, 012009. [Google Scholar] [CrossRef]
- Price, J.; Yun, H. Design and testing of integrated metal armature sabots for launch of armour penetrating projectiles from electric guns. IEEE Trans. Magn. 1995, 31, 219–224. [Google Scholar] [CrossRef]
- Hsieh, K.; Kim, B. International railgun modelling effort. IEEE Trans. Magn. 1997, 33, 245–248. [Google Scholar] [CrossRef]
- Kim, S.; An, S.; Lee, B.; Lee, Y.; Yang, K. Modeling and circuit analysis of an electromagnetic launcher system for transient current waveforms. In Proceedings of the 2014 17th International Symposium on Electromagnetic Launch Technology, La Jolla, CA, USA, 7–11 July 2014; pp. 1–5. [Google Scholar]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model Parameters | Symbol | Values |
|---|---|---|
| Rail length/mm | lr | 3500.00 |
| Rail height/mm | hr | 40.00 |
| Rail width/mm | wr | 20.00 |
| Rail conductivity/(S/m) | σr | 3.45 × 107 |
| Rail permeability/(H/m) | μr | 4π × 10−7 |
| Armature length/mm | la | 50.00 |
| Armature height/mm | ha | 28.00 |
| Armature width/mm | wa | 30.00 |
| Armature conductivity/(S/m) | σa | 2.20 × 107 |
| Armature permeability/(H/m) | μa | 4π × 10−7 |
| Parameters | Symbol | Values |
|---|---|---|
| Armature mass/g | ma | 125.00 |
| Friction coefficient | μ | 0.11 |
| Mechanical preloading pressure/N | FN,p | 5600 |
| Specific heat ratio of the air | γ | 1.4 |
| Initial air density/(kg/m3) | ρ0 | 1.29 |
| Armature cross-sectional area/m2 | S | 0.00084 |
| Perimeter of armature section/m | L | 0.116 |
| Viscous friction coefficient | Cf | 0.003 |
| Armature Conductivities | Critical Velocity/(m/s) |
|---|---|
| Standard armature conductivity | 503.86 |
| 80% standard armature conductivity | 637.01 |
| 60% standard armature conductivity | 823.30 |
| 40% standard armature conductivity | 956.49 |
| Model Parameters | Symbol | Values |
|---|---|---|
| Rail length/mm | lr | 220.00 |
| Rail height/mm | hr | 31.75 |
| Rail width/mm | wr | 6.35 |
| Rail conductivity/(S/m) | σr | 5.80 × 10 |
| Rail permeability/(H/m) | μr | 4π × 10−7 |
| Armature length/mm | la | 28.59 |
| Armature height/mm | ha | 25.00 |
| Armature width/mm | wa | 25.00 |
| Armature conductivity/(S/m) | σa | 1.86 × 107 |
| Armature permeability/(H/m) | μa | 4π × 10−7 |
| Name | SVR | RF | DNN | DBN-DNN |
|---|---|---|---|---|
| When using sample data under standard armature conductivity to train the model. | 6.07% | 5.84% | 2.38% | 2.02% |
| When using sample data under different armature conductivity to train the model. | 2.23% | 2.16% | 0.75% | 0.52% |
| Case | Training Strategy | MAPE | Training Time/s |
|---|---|---|---|
| Case 1 | Original training strategy. | 0.52% | 76 |
| Improved training strategy. | 0.42% | 41 | |
| Case 2 | Original training strategy. | 0.56% | 202 |
| Improved training strategy. | 0.45% | 73 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jin, L.; Gong, D.; Yan, Y.; Zhang, C. Armature Electromagnetic Force Extrapolation Prediction Method for Electromagnetic Railgun at High Speed. Appl. Sci. 2023, 13, 3819. https://doi.org/10.3390/app13063819
Jin L, Gong D, Yan Y, Zhang C. Armature Electromagnetic Force Extrapolation Prediction Method for Electromagnetic Railgun at High Speed. Applied Sciences. 2023; 13(6):3819. https://doi.org/10.3390/app13063819
Chicago/Turabian StyleJin, Liang, Dexin Gong, Yingang Yan, and Chenyuan Zhang. 2023. "Armature Electromagnetic Force Extrapolation Prediction Method for Electromagnetic Railgun at High Speed" Applied Sciences 13, no. 6: 3819. https://doi.org/10.3390/app13063819
APA StyleJin, L., Gong, D., Yan, Y., & Zhang, C. (2023). Armature Electromagnetic Force Extrapolation Prediction Method for Electromagnetic Railgun at High Speed. Applied Sciences, 13(6), 3819. https://doi.org/10.3390/app13063819