
Analytical Model of Gear Thermal Stiffness Based on the Potential Energy Method

Abstract
1. Introduction
2. Gear Stiffness Based on Potential Energy Method
3. Gear Thermal Stiffness Based on Potential Energy Method
3.1. Influence of Temperature on Material Properties
3.2. Effect of Temperature on Contact Stiffness
3.2.1. Contact Model Considering Temperature Influence
3.2.2. Contact Thermal Stiffness without Considering Thermal Stress
3.2.3. Contact Thermal Stiffness Considering Thermal Stress
3.3. Gear Thermal Stiffness
4. Case Study and Discussion
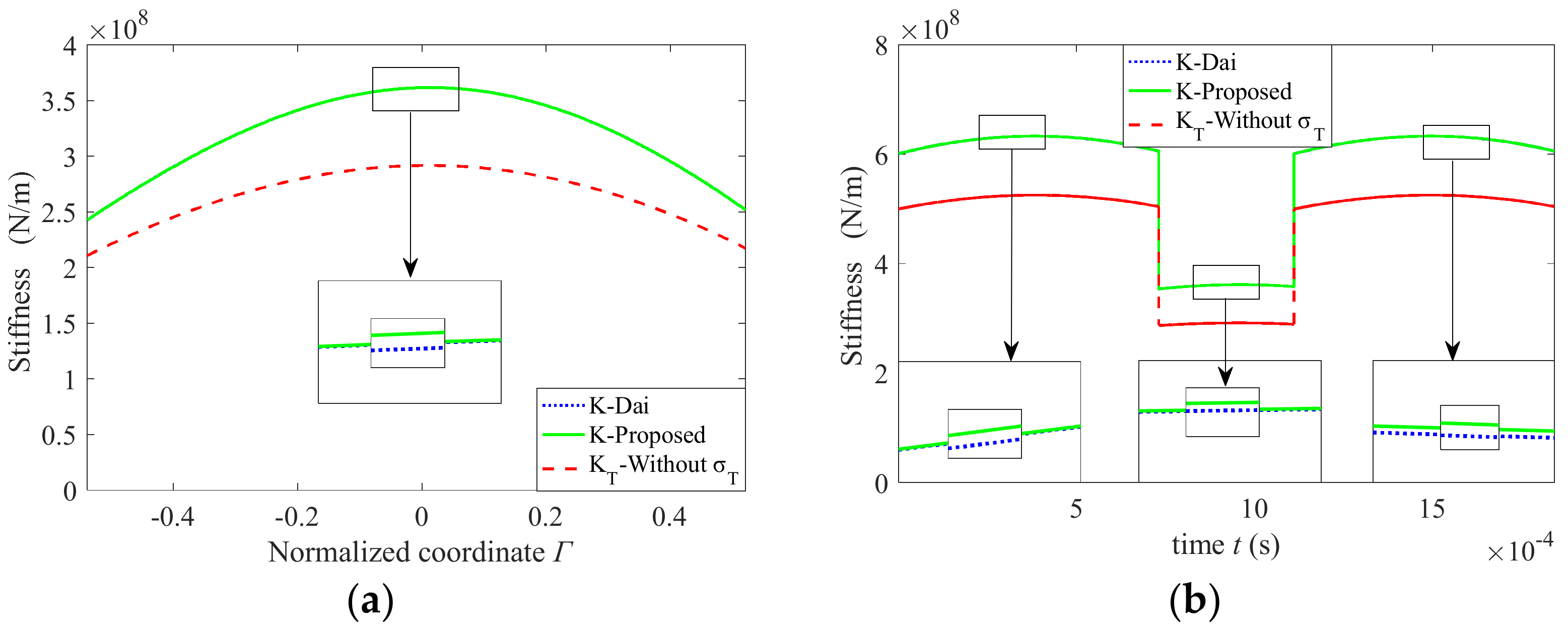
4.1. Influence of the Thermal Stress on Thermal Stiffness
4.2. Influence of Temperature and Temperature Distribution on Gear Thermal Stiffness
5. Verification of Thermal Stiffness
6. Conclusions
- (1)
- The temperature mainly affects the gear stiffness by changing the gear contact stiffness at contact point. Compared with the elastic stiffness, the gear thermal stiffness decreases as a whole. The decrease in stiffness is a nonuniform distribution along the line of action. The decrease is the smallest at the meshing-in and -out points and the largest near the pitch point.
- (2)
- The thermal stress from the work-side surface to the back-side surface is distributed nonlinearly in the tooth profile plane. The thermal stiffness decreases in the area near the pitch point and increases in the meshing-in and -out sections after considering the thermal stress. Overall, the amount of change is small. The assumption that thermal stress effects are ignored is feasible when calculating the gear thermal stiffness.
- (3)
- The gear thermal stiffness decreases with increasing gear temperature. The influence of the temperature distribution in the tooth profile plane on the gear thermal stiffness is small. It can be ignored in the approximate calculation of the gear thermal stiffness.
Author Contributions
Funding
Conflicts of Interest
Appendix A
“In terms of the meshing stiffness, the thermal stiffness is smaller than the elastic stiffness, and their relationship is nonlinear. The difference between thermal stiffness and elastic stiffness is small at the meshing-in and -out points, and the biggest difference emerges near the pitch point.”
“The determination of Xte is relatively complex. In this paper, the elastic deformation and the thermo-elastic coupling deformation of the gear at the contact point are obtained by using the finite element method, respectively. Then, the proportional relation between the elastic deformation and the thermo-elastic coupling deformation is obtained. Thus, the thermal stress correction coefficient is ratio of the thermo-elastic coupling deformation and the elastic deformation.”
Appendix B
References
- Liang, X.; Zhang, H.; Zuo, M.J.; Qin, Y. Three new models for evaluation of standard involute spur gear mesh stiffness. Mech. Syst. Sig. Process. 2018, 101, 424–434. [Google Scholar] [CrossRef]
- Tang, X.; Zou, L.; Yang, W.; Huang, Y.; Wang, H. Novel mathematical modelling methods of comprehensive mesh stiffness for spur and helical gears. Appl. Math. Model. 2018, 64, 524–540. [Google Scholar] [CrossRef]
- Feng, M.; Ma, H.; Li, Z.; Wang, Q.; Wen, B. An improved analytical method for calculating time-varying mesh stiffness of helical gears. Meccanica 2018, 53, 1131–1145. [Google Scholar] [CrossRef]
- Yang, Y.; Wang, J.; Zhou, Q.; Huang, Y.; Zhu, J.; Yang, W. Mesh stiffness modeling considering actual tooth profile geometry for a spur gear pair. Mech. Ind. 2018, 19, 306. [Google Scholar] [CrossRef]
- Feng, S.; Chang, L.; He, Z. A hybrid finite element and analytical model for determining the mesh stiffness of internal gear pairs. J. Mech. Sci. Technol. 2020, 34, 2477–2485. [Google Scholar] [CrossRef]
- Wang, Q.; Chen, K.; Zhao, B.; Ma, H.; Kong, X. An analytical-finite-element method for calculating mesh stiffness of spur gear pairs with complicated foundation and crack. Eng. Fail. Anal. 2018, 94, 339–353. [Google Scholar] [CrossRef]
- Verma, J.G.; Kumar, S.; Kankar, P.K. Crack growth modeling in spur gear tooth and its effect on mesh stiffness using extended finite element method. Eng. Fail. Anal. 2018, 94, 109–120. [Google Scholar] [CrossRef]
- Cooley, C.G.; Liu, C.; Dai, X.; Parker, R.G. Gear tooth mesh stiffness: A comparison of calculation approaches. Mech. Mach. Theory 2016, 105, 540–553. [Google Scholar] [CrossRef]
- Karpat, F.; Yuce, C.; Dugan, O. Experimental measurement and numerical validation of single tooth stiffness for involute spur gears. Measurement 2020, 150, 107043. [Google Scholar] [CrossRef]
- Raghuwanshi, N.K.; Parey, A. Experimental measurement of mesh stiffness by laser displacement sensor technique. Measurement 2018, 128, 63–70. [Google Scholar] [CrossRef]
- Chen, K.; Huangfu, Y.; Ma, H.; Xu, Z.; Li, X.; Wen, B. Calculation of mesh stiffness of spur gears considering complex foundation types and crack propagation paths. Mech. Syst. Sig. Process. 2019, 130, 273–292. [Google Scholar] [CrossRef]
- Jiang, H.J.; Liu, F.H. Mesh stiffness modelling and dynamic simulation of helical gears with tooth crack propagation. Meccanica 2020, 55, 1215–1236. [Google Scholar] [CrossRef]
- Wang, Q.B.; Zhang, Y.M. A model for analyzing stiffness and stress in a helical gear pair with tooth profile errors. J. Vib. Control 2017, 23, 272–289. [Google Scholar] [CrossRef]
- Saxena, A.; Parey, A.; Chouksey, M. Time varying mesh stiffness calculation of spur gear pair considering sliding friction and spalling defects. Eng. Fail. Anal. 2016, 70, 200–211. [Google Scholar] [CrossRef]
- Cui, L.; Liu, T.; Huang, J.; Wang, H. Improvement on Meshing Stiffness Algorithms of Gear with Peeling. Symmetry 2019, 11, 609. [Google Scholar] [CrossRef]
- Chen, Z.G.; Shao, Y.M. Mesh stiffness calculation of a spur gear pair with tooth profile modification and tooth root crack. Mech. Mach. Theory 2013, 62, 63–74. [Google Scholar] [CrossRef]
- Gou, X.F.; Qi, C.J.; Chen, D.L. Nonlinear dynamic modelling and analysis of gear system with tooth contact temperature. J. Mech. Eng. 2015, 51, 71–77. (In Chinese) [Google Scholar] [CrossRef]
- Lin, T.; Zhao, Z.; Jiang, F.; Chen, B. An analytic algorithm of time-varying mesh stiffness of helical gears considering temperature effect. J. Hunan Univ. (Nat. Sci.) 2020, 47, 6–13. (In Chinese) [Google Scholar]
- Liu, H.; Yan, P.F.; Gao, P. Effects of temperature on the time-varying mesh stiffness, vibration response, and support force of a multi-stage planetary gear. J. Vib. Acoust. 2020, 142, 051110. [Google Scholar] [CrossRef]
- Sun, Z.; Chen, S.; Hu, Z.; Tao, X.; Chen, Y. Analytical models for thermal deformation and mesh stiffness of spur gears under steady temperature field. Eng. Fail. Anal. 2022, 133, 105972. [Google Scholar] [CrossRef]
- Luo, B.; Li, W.; Li, L.S. Research on thermal stiffness of gear based on thermo-elastic coupling. J. Cent. South Univ. (Sci. Technol.) 2017, 48, 3209–3215. (In Chinese) [Google Scholar]
- Luo, B.; Li, W. Investigation on the influence of heat on the dynamic characteristics of a gear transmission system. Eng. Fail. Anal. 2020, 116, 104724. [Google Scholar] [CrossRef]
- Luo, B.; Li, W. Experimental study on thermal dynamic characteristics of gear transmission system. Measurement 2019, 136, 154–162. [Google Scholar] [CrossRef]
- Lu, R.X.; Tang, W.C. Analytical calculation models for mesh stiffness and backlash of spur gears under temperature effects. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2022, 236, 4450–4462. [Google Scholar] [CrossRef]
- Dai, H.; Long, X.; Chen, F.; Xun, C. An improved analytical model for gear mesh stiffness calculation. Mech. Mach. Theory 2021, 159, 104262. [Google Scholar] [CrossRef]
- Liang, X.; Zuo, M.J.; Patel, T.H. Evaluating the time-varying mesh stiffness of a planetary gear set using the potential energy method. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2013, 228, 535–547. [Google Scholar] [CrossRef]
- Sainsot, P.; Velex, P.; Duverger, O. Contribution of gear body to tooth deflections—A new bidimensional analytical formula. J. Mech. Des. 2004, 126, 748–752. [Google Scholar] [CrossRef]
- Xie, C.; Hua, L.; Han, X.; Lan, J.; Wan, X.; Xiong, X. Analytical formulas for gear body-induced tooth deflections of spur gears considering structure coupling effect. Int. J. Mech. Sci. 2018, 148, 174–190. [Google Scholar] [CrossRef]
- Luo, B.; Li, W. Influence factors on bulk temperature field of gear. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2017, 231, 953–964. [Google Scholar] [CrossRef]
- Johnson, K.L. Contact Mechanics; Cambridge University Press: Cambridge, MA, USA, 1985. [Google Scholar]
- Ren, S.B.; Bai, M.H. Hot deformation and error analysis of sprocket wheel tooth profile for even tooth sintering machine. Chin. J. Mech. Eng. 2011, 47, 55–60. (In Chinese) [Google Scholar] [CrossRef]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Room temperature (°C) | 25 | 75 | 125 | 175 | 225 |
| Young’s modulus (GPa) | 207 | 204 | 200 | 195 | 189 |
| Poisson’s ratio | 0.290 | 0.292 | 0.294 | 0.296 | 0.298 |
| Number of Teeth z1/z2 | Module m (mm) | Pressure Angle α (°) | The Face Width b (mm) | Power P (kW) | Speed n1 (r·min−1) |
|---|---|---|---|---|---|
| 27/35 | 3 | 20 | 25 | 80 | 2000 |
| Addendum coefficient | Clearance coefficient c* | Linear expansion coefficient αT (°C−1) | Gear initial temperature (°C) | Steady-state temperature rise of mesh tooth surface (°C) | Steady-state temperature rise of nonmesh tooth surface (°C) |
| 1 | 0.2 | 1.13 × 10−5 | 20 | 60, 75, 90 | 50, 60, 70 |
| Moment | The 2nd min | The 4th min | The 6th min | The 8th min | The 10th min |
|---|---|---|---|---|---|
| Temperature (°C) | 31.4 | 33.2 | 36.8 | 39.1 | 42.7 |
| Frequency (Hz) | 350.2 | 348.8 | 347.8 | 347.6 | 347.3 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
He, Y.; Yang, H. Analytical Model of Gear Thermal Stiffness Based on the Potential Energy Method. Appl. Sci. 2023, 13, 3599. https://doi.org/10.3390/app13063599
He Y, Yang H. Analytical Model of Gear Thermal Stiffness Based on the Potential Energy Method. Applied Sciences. 2023; 13(6):3599. https://doi.org/10.3390/app13063599
Chicago/Turabian StyleHe, Yanbing, and Haibo Yang. 2023. "Analytical Model of Gear Thermal Stiffness Based on the Potential Energy Method" Applied Sciences 13, no. 6: 3599. https://doi.org/10.3390/app13063599
APA StyleHe, Y., & Yang, H. (2023). Analytical Model of Gear Thermal Stiffness Based on the Potential Energy Method. Applied Sciences, 13(6), 3599. https://doi.org/10.3390/app13063599