
Theoretical Investigation of Mesh Relationship and Mesh Stiffness of Internal Spur Gears with Tooth Wear

Abstract
:1. Introduction
- An analytical model for a new mesh relationship of internal spur gear with tooth wear is proposed for the first time.
- The multi-tooth mesh rule to evaluate the effect of tooth wear on the multi-tooth mesh relationship is proposed.
- According to the new mesh relationship and the multi-tooth mesh rule, the effects of tooth wear on the mesh stiffness and USTE are studied.
2. Mesh Relationship Modeling of Internal Spur Gears with Tooth Wear
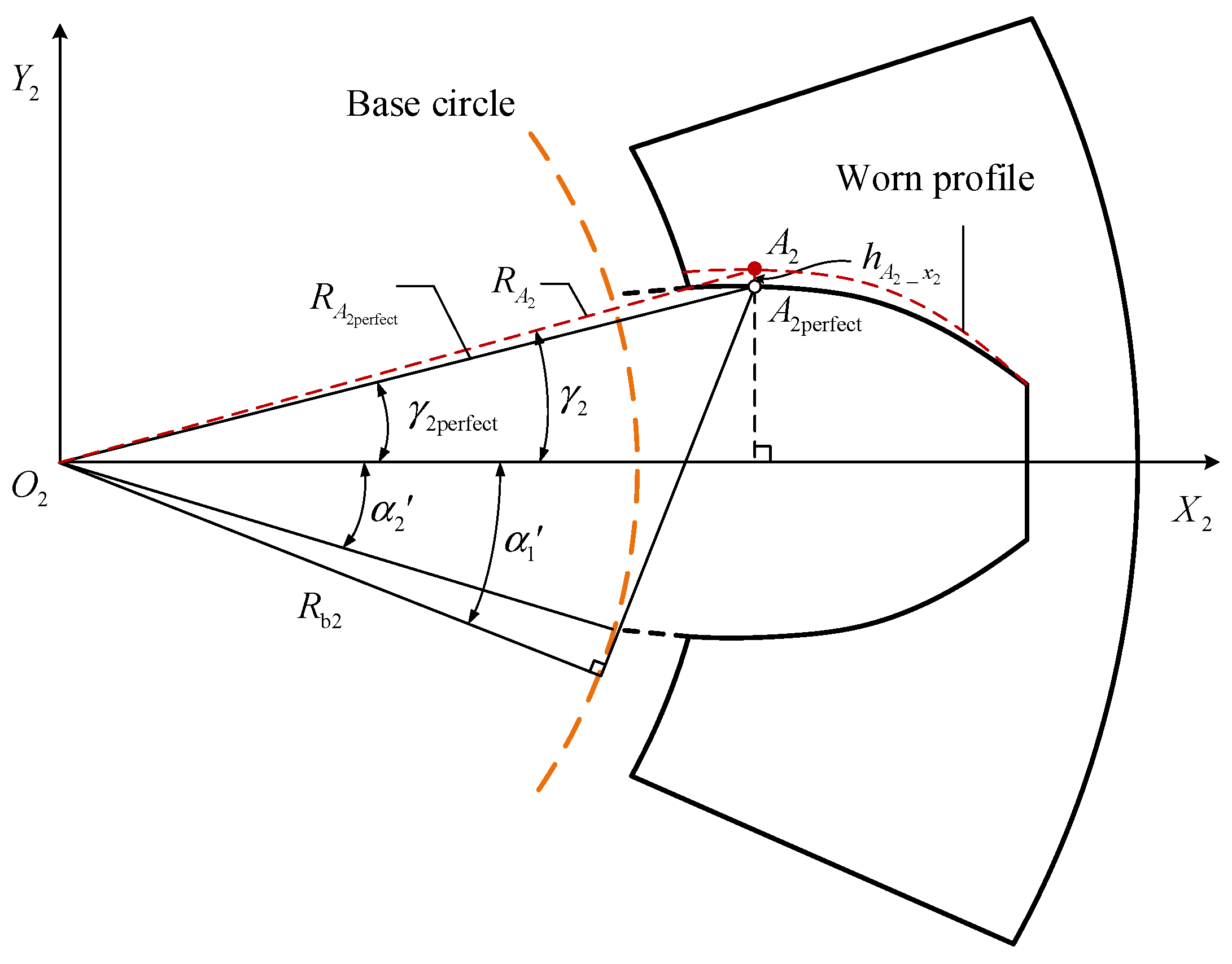
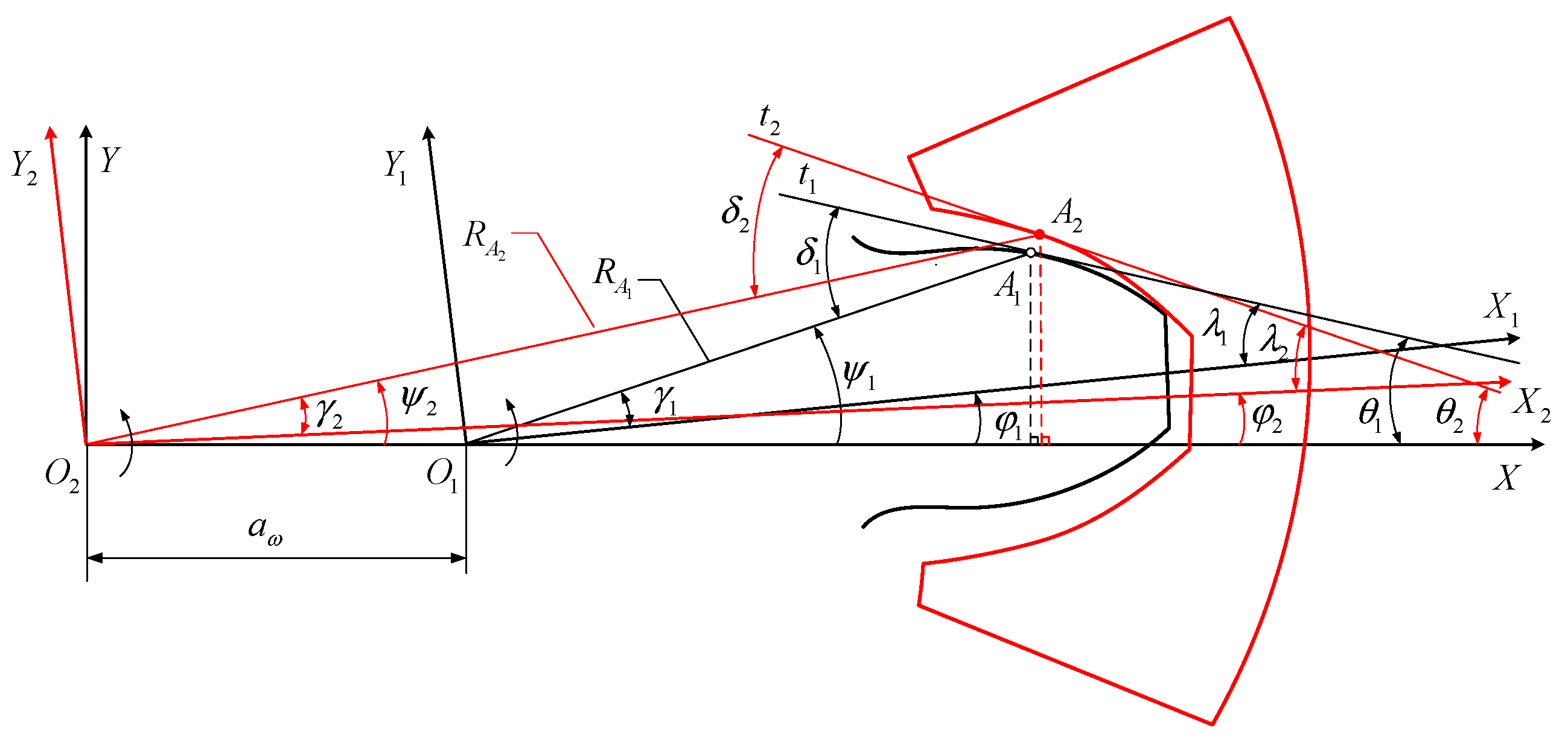
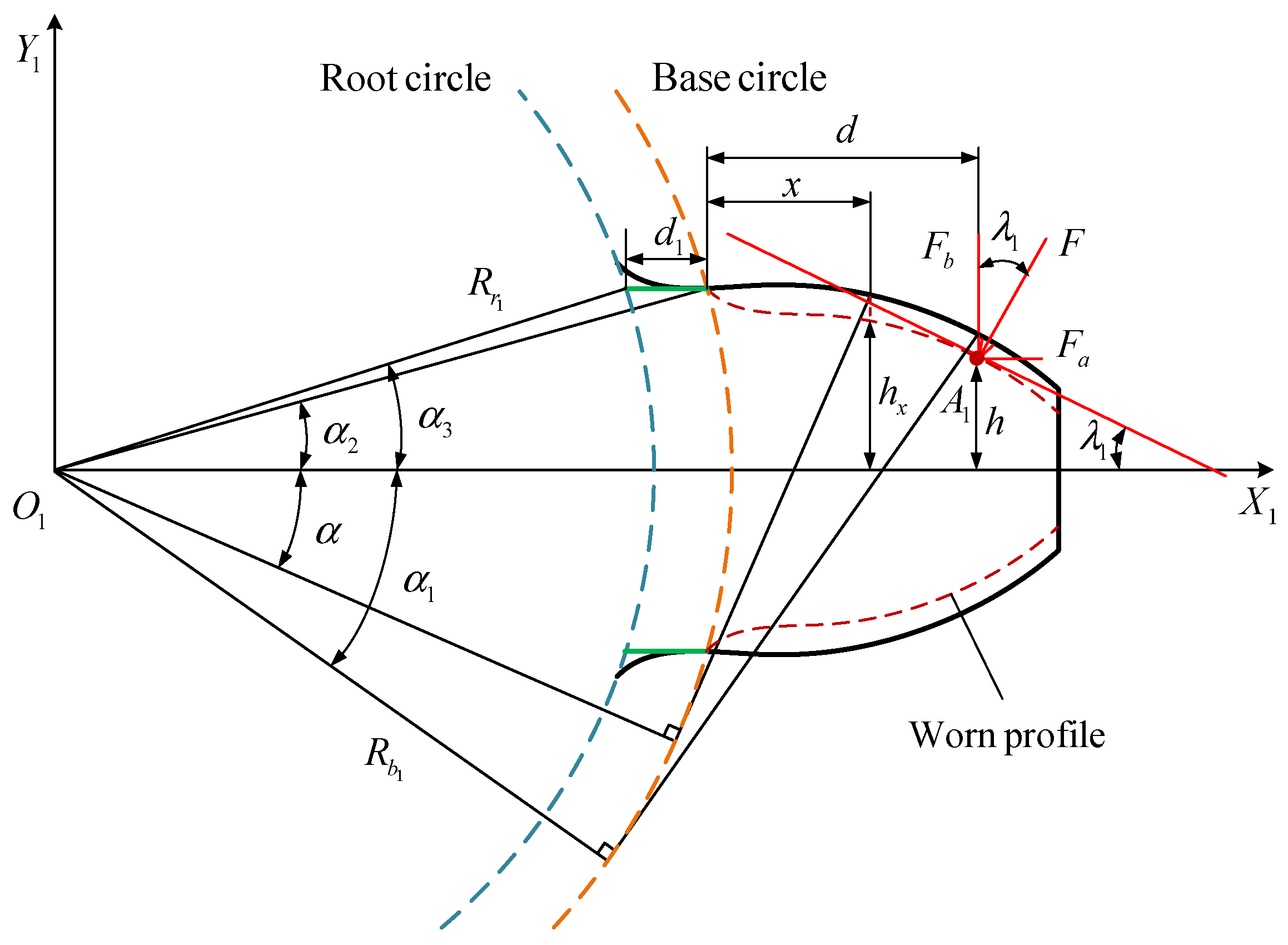
2.1. Analytical Model
- (1)
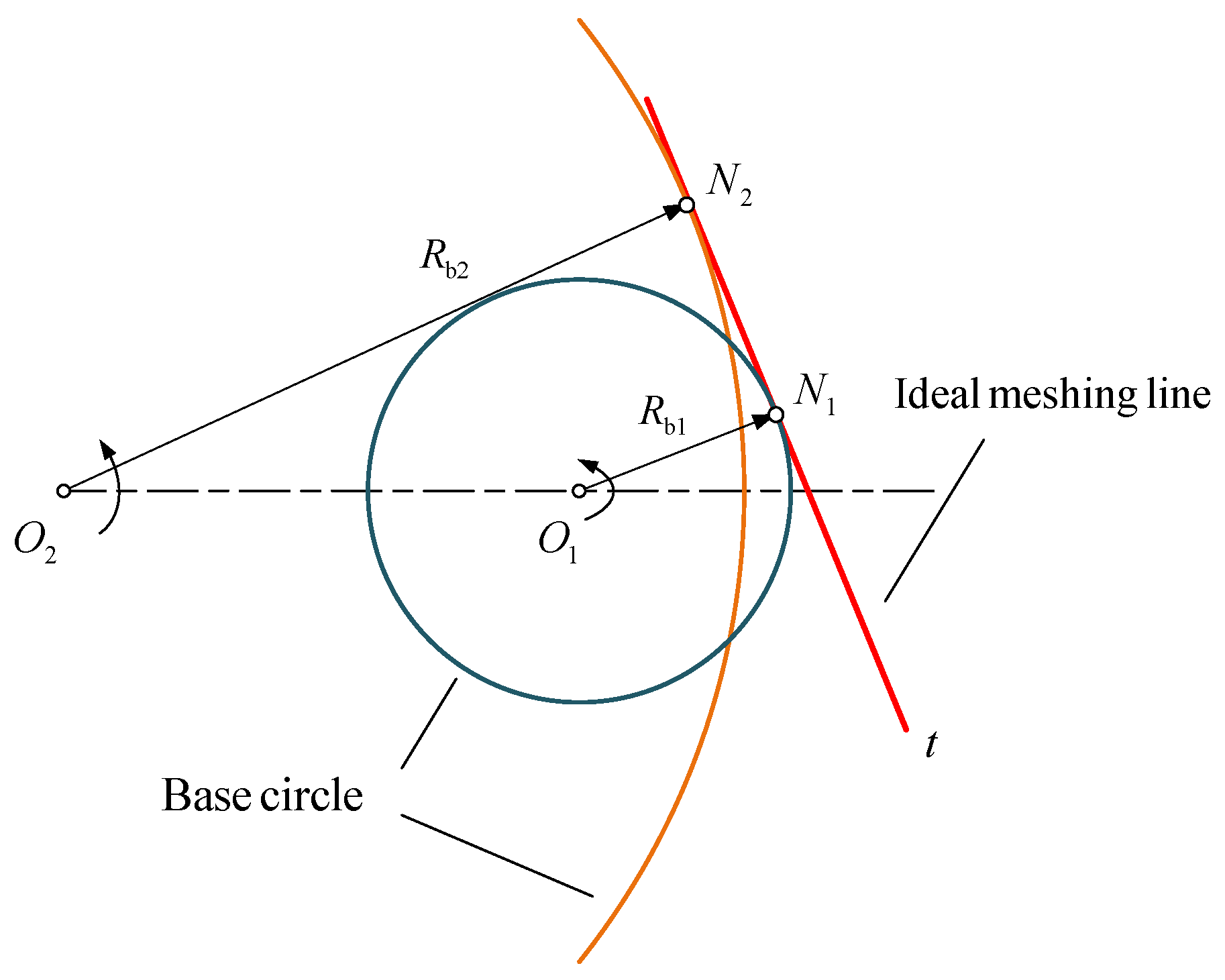
- The meshing point of the driving gear moves from tooth root to tip as the gear rotates, and the driven gear is the opposite.
- (2)
- The gear center distance remains unchanged, which can be written as follows:
- (3)
- With the meshing points and engaging, the axis and the tangents of two meshing points are the same, which can be expressed as:
| Algorithm 1: Algorithm of the analytical model solution |
|
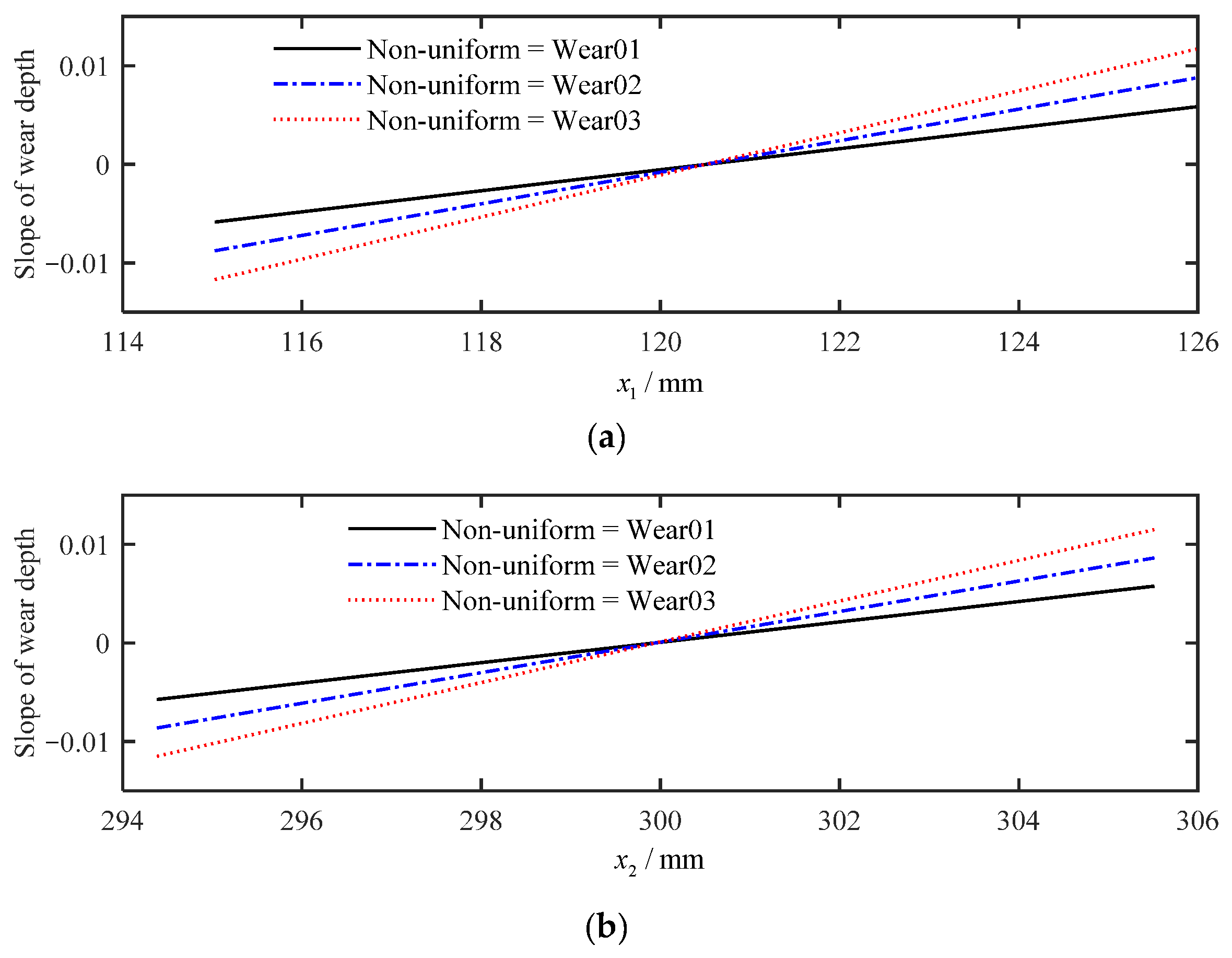
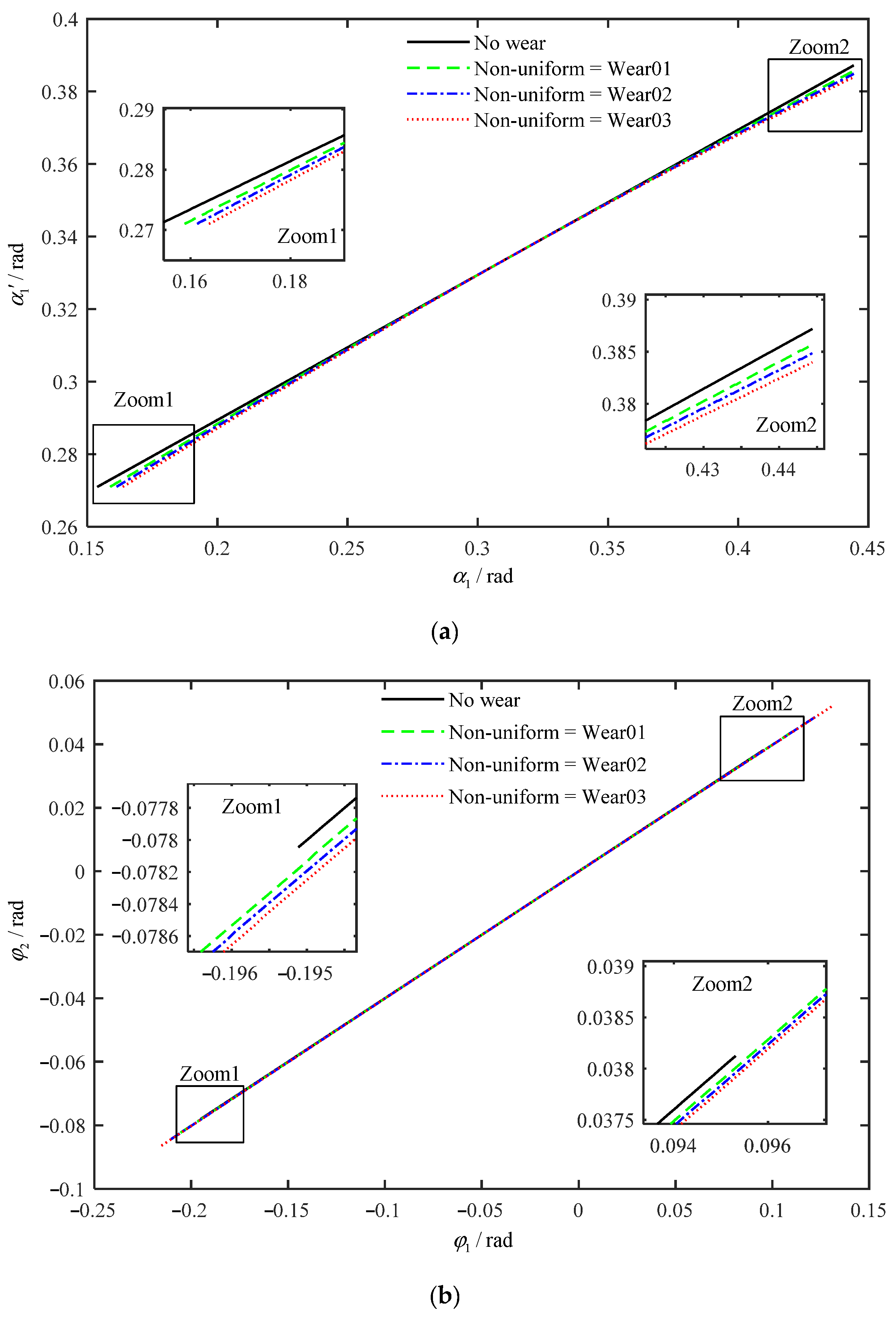
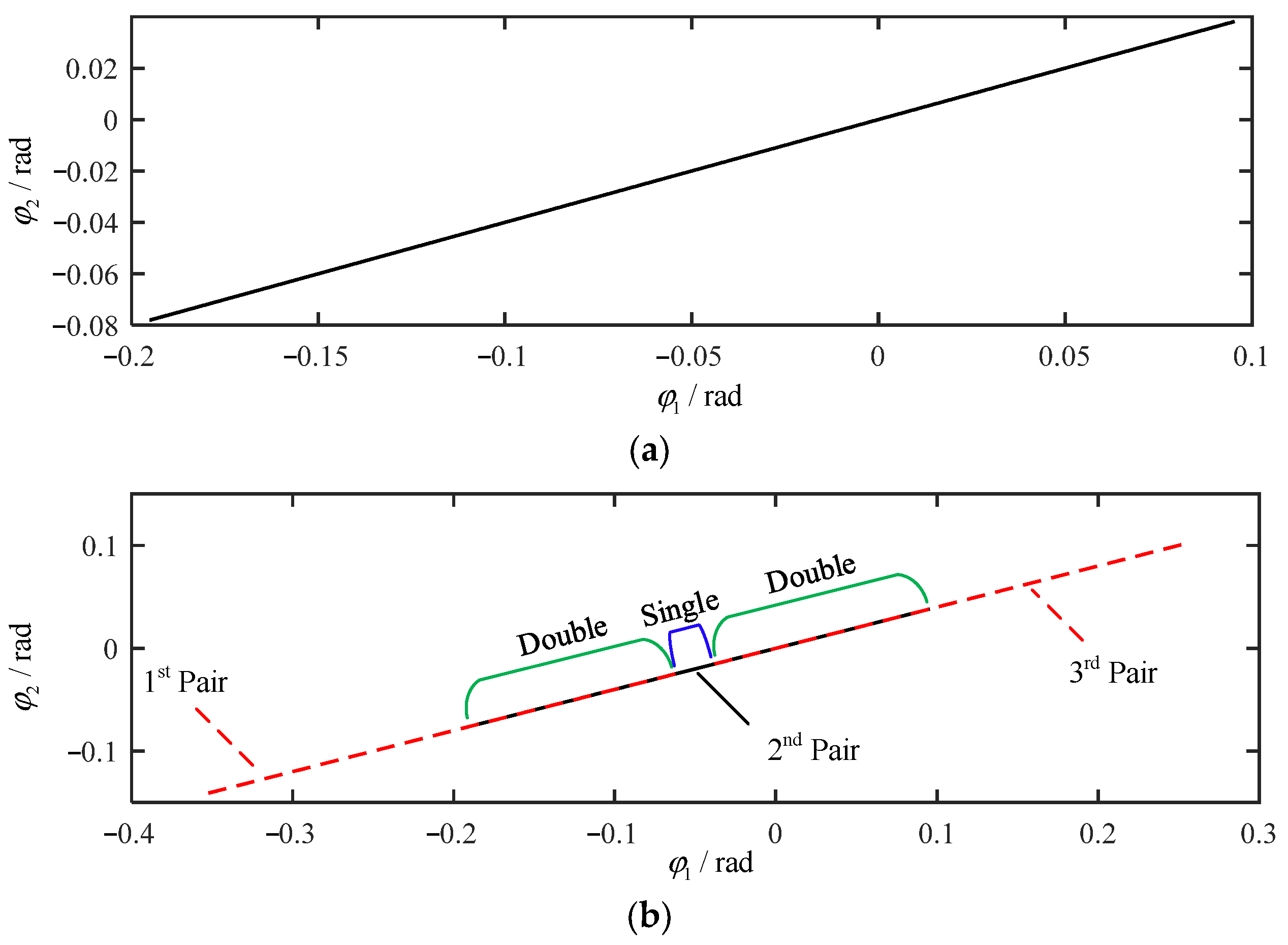
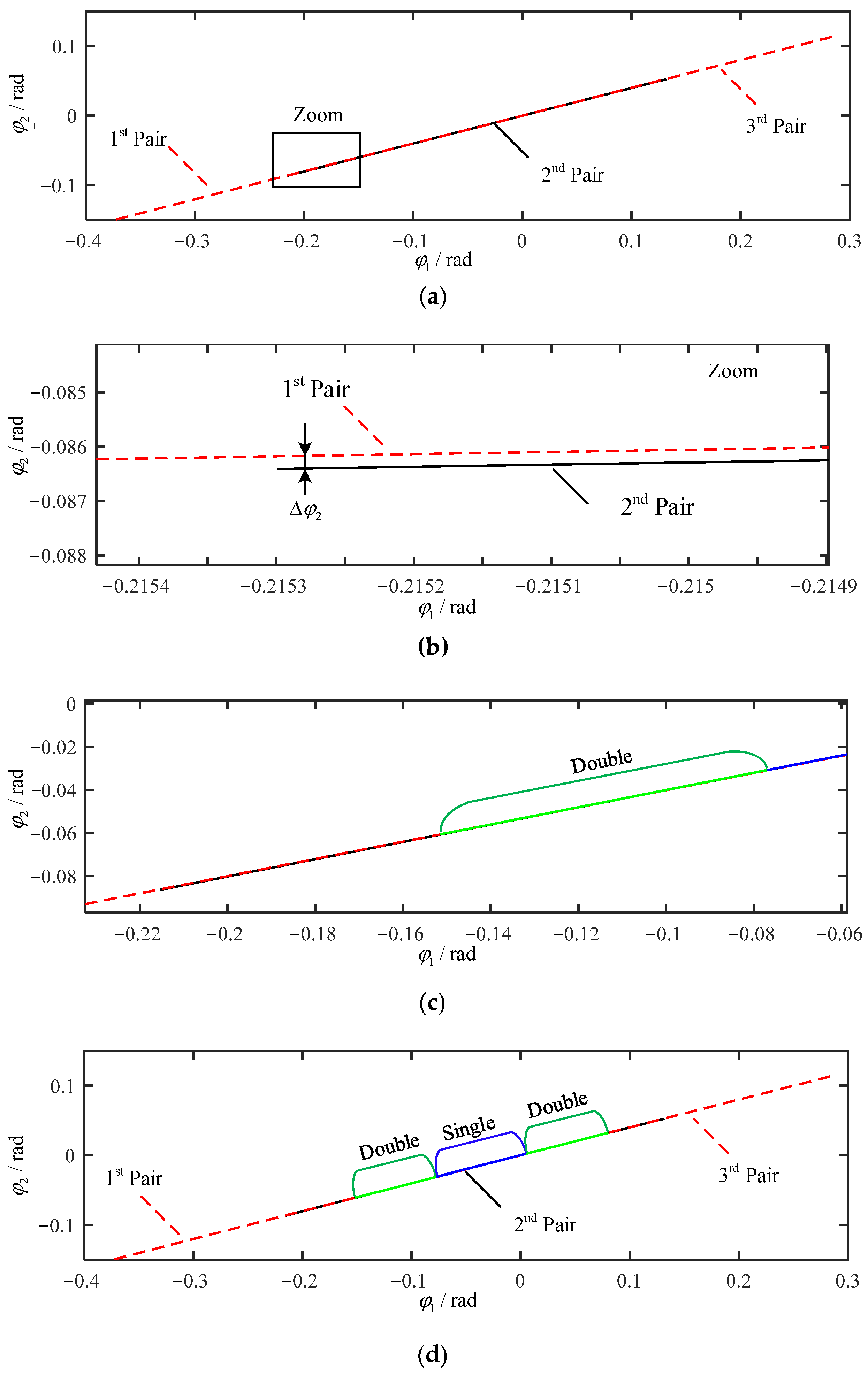
2.2. Results of Mesh Relationship with Tooth Wear
3. Mesh Stiffness of Internal Spur Gears with Tooth Wear
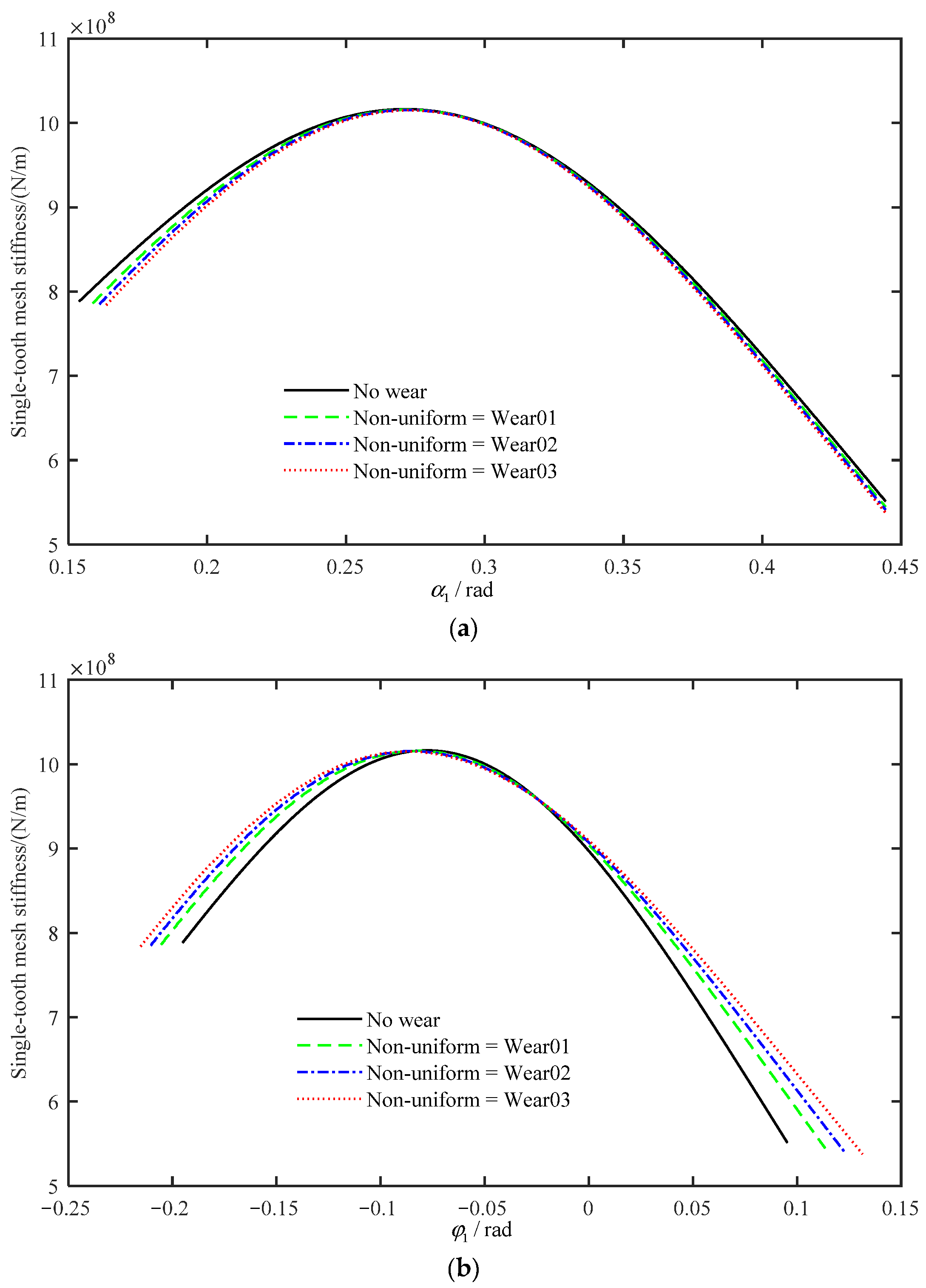
3.1. Single-Tooth Mesh Stiffness
3.2. Multi-Tooth Mesh Stiffness
3.2.1. Multi-Tooth Mesh Rule
- (1)
- The tooth pair whose is larger meshes first in the initial double-tooth meshing range with the increase of .
- (2)
- Two tooth pairs mesh concurrently when for the same where Threshold represents the threshold of the tolerable error of rotational angle.
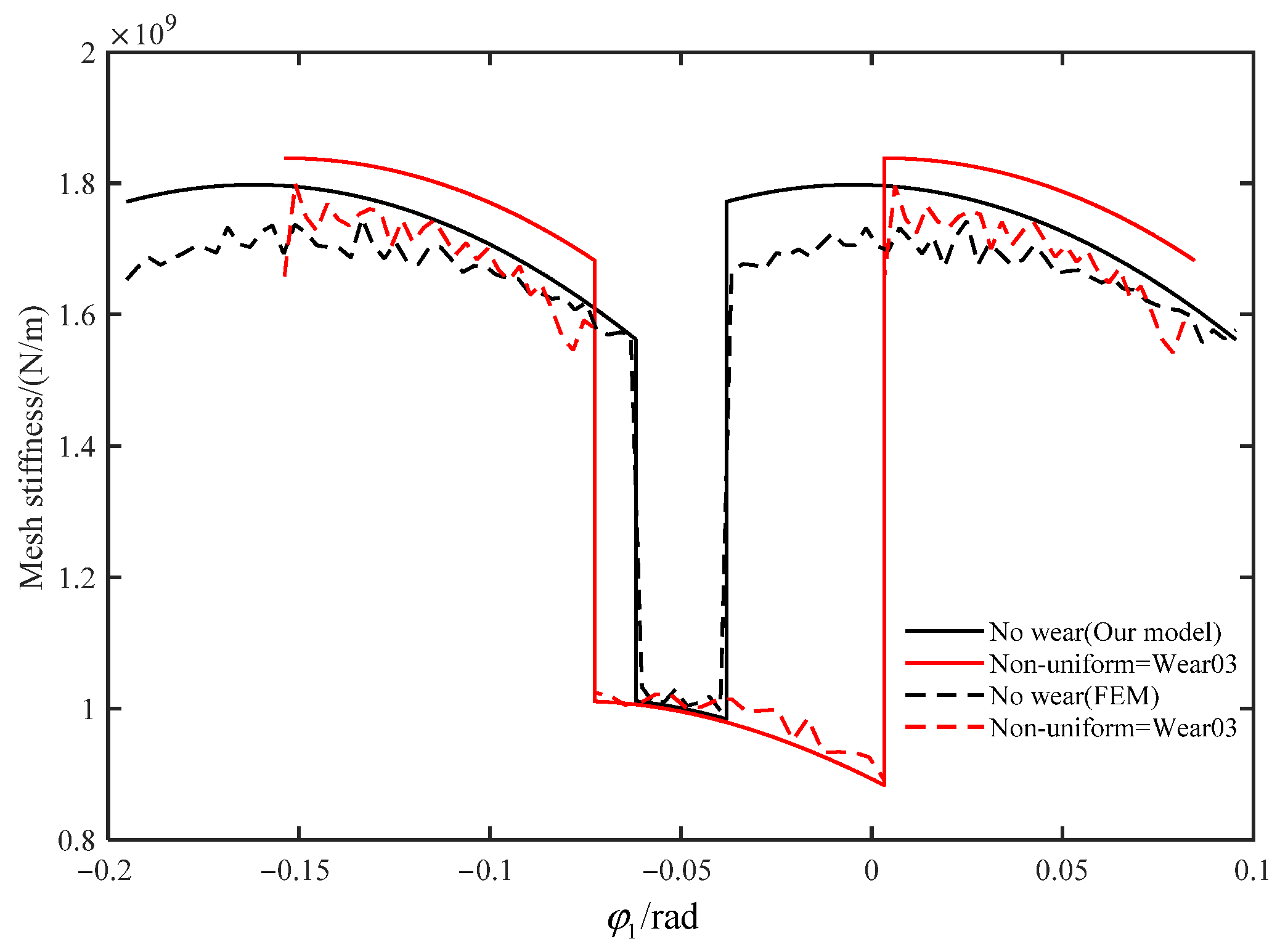
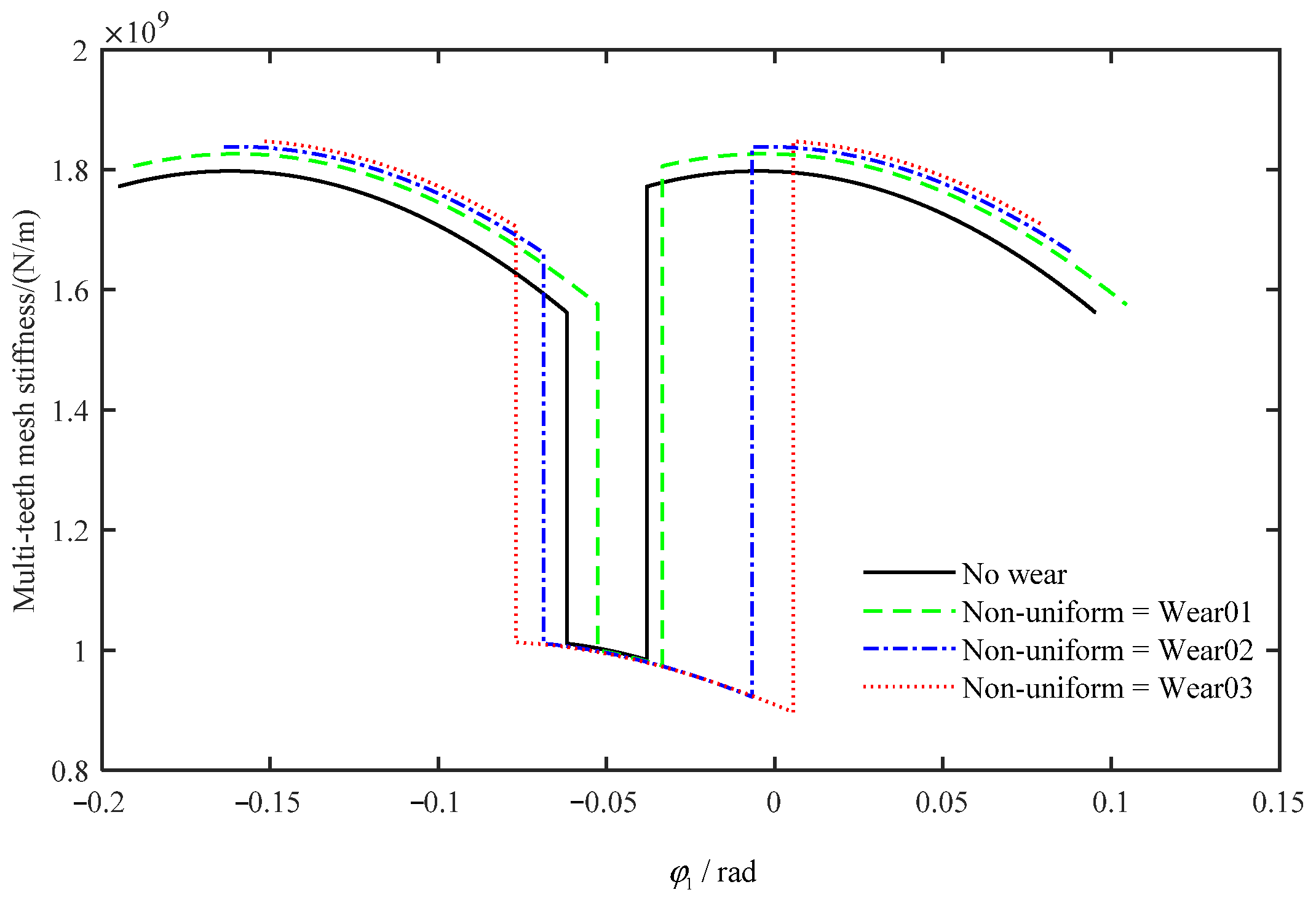
3.2.2. Results of Multi-Tooth Mesh Stiffness with Tooth Wear
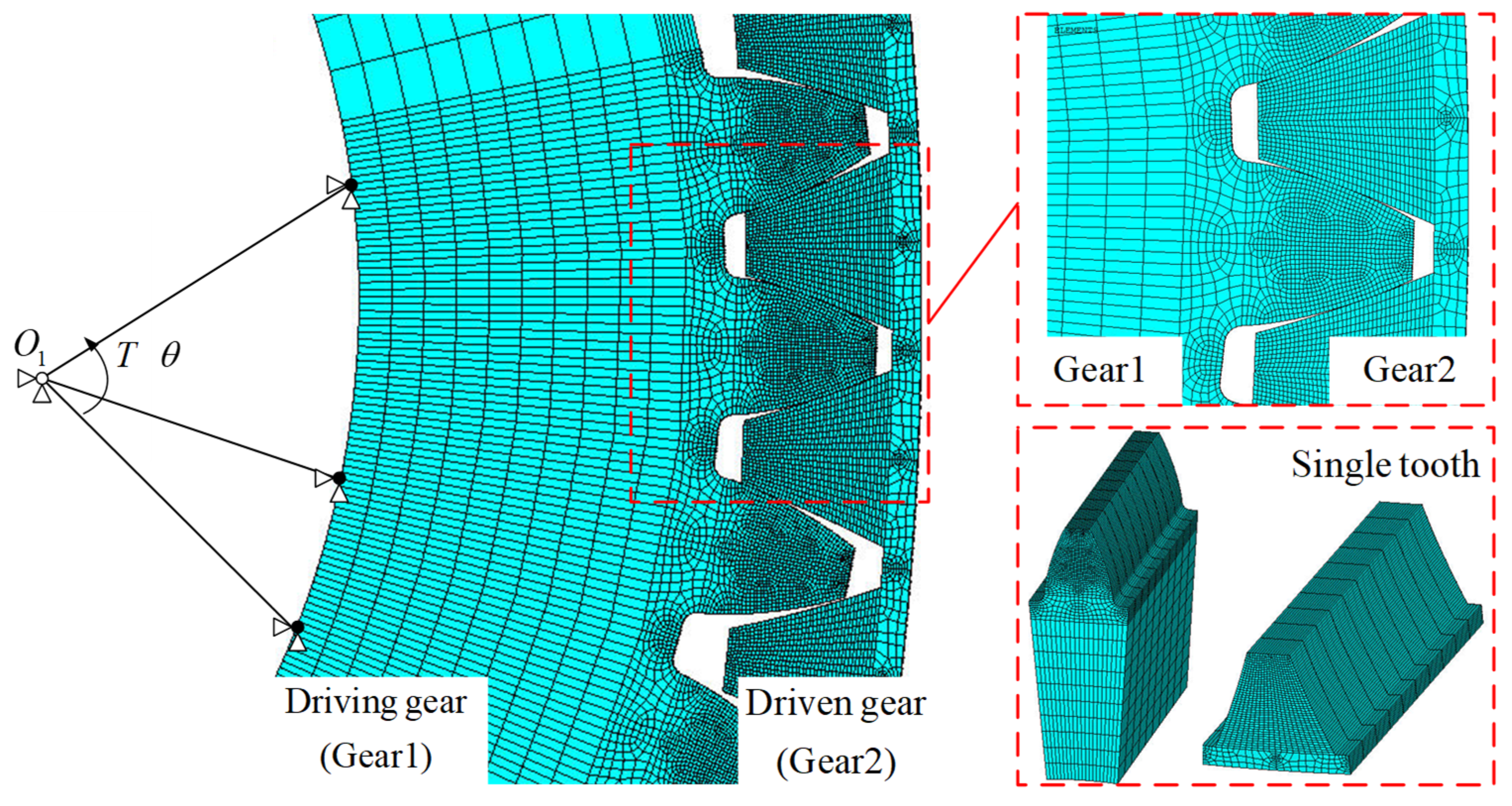
3.3. Finite Element Verification
4. Unloaded Static Transmission Error of Internal Spur Gears with Tooth Wear
5. Conclusions
- (1)
- An analytical model for internal spur gears with tooth wear is proposed, based on which the new mesh relationship of tooth wear is derived. With the proposed multi-tooth mesh rule and new mesh relationship, the evaluation method of the influence of tooth wear on mesh stiffness and USTE is presented.
- (2)
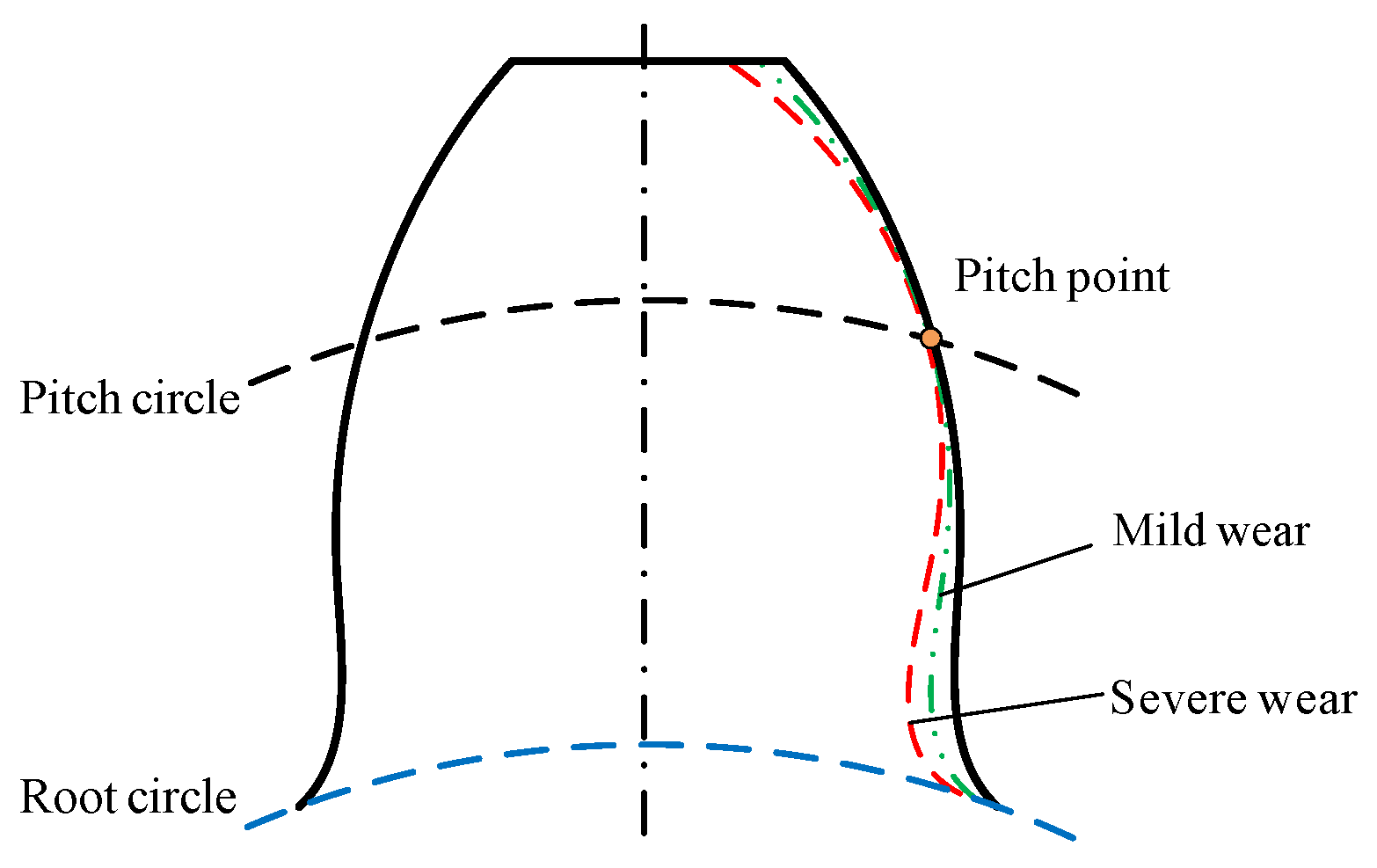
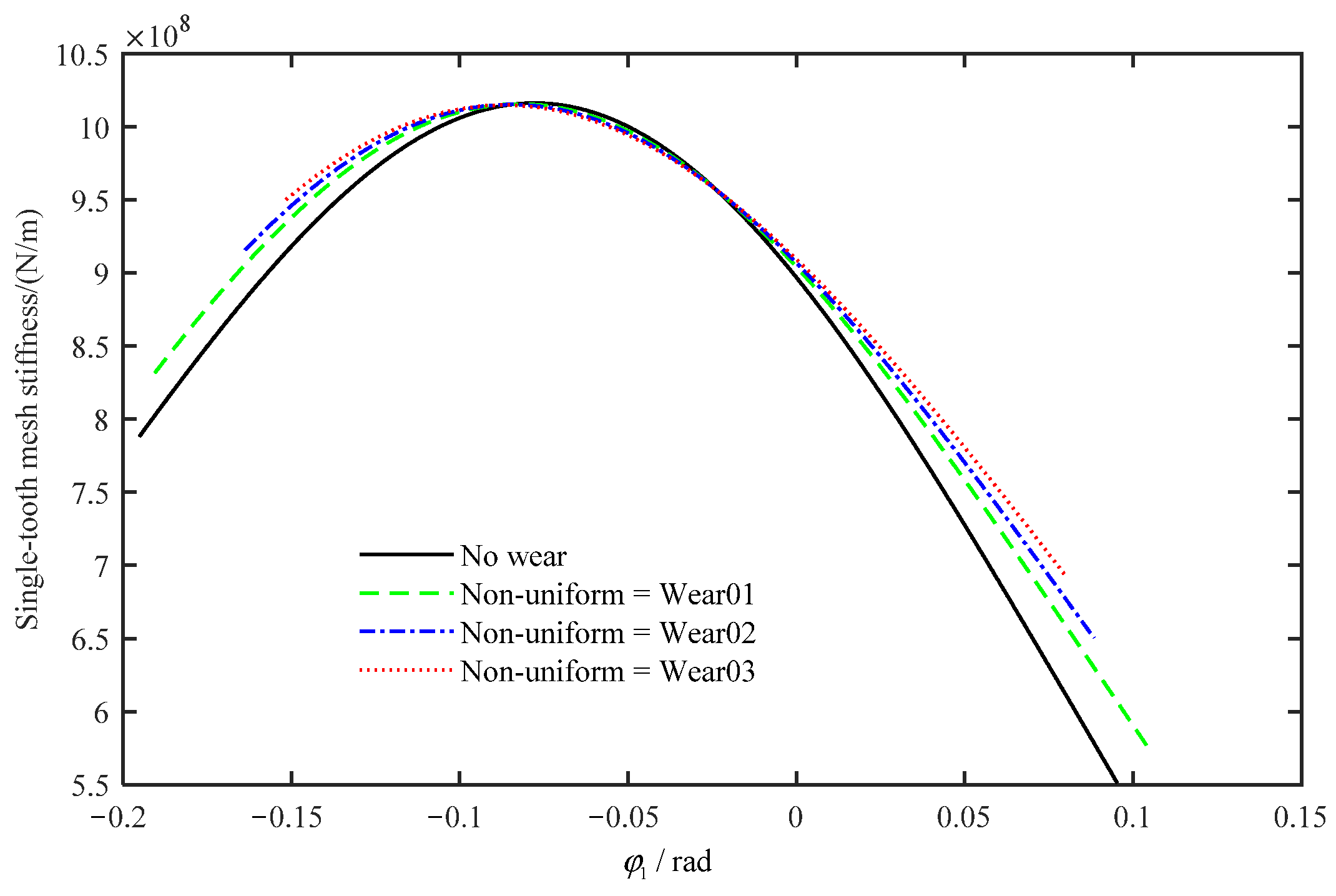
- The case of non-uniform wear illustrates that tooth wear mainly affects the meshing ranges of mesh stiffness in a single tooth and double teeth and has relatively less effect on the amplitude of the meshing stiffness.
- (3)
- The multi-tooth mesh stiffness of the internal spur gear calculated by the proposed analytical model has been verified by the FE models. The meshing ranges of the two in single-tooth-pair and double-tooth-pair mesh period match well. The maximum error is 6.4% and 3.2% in double-tooth meshing range and single-tooth meshing range, respectively, for the prefect pair. The maximum error for the worn gear pair is 9.8% in the double-tooth meshing range and 4.6% in the single-tooth meshing range.
- (4)
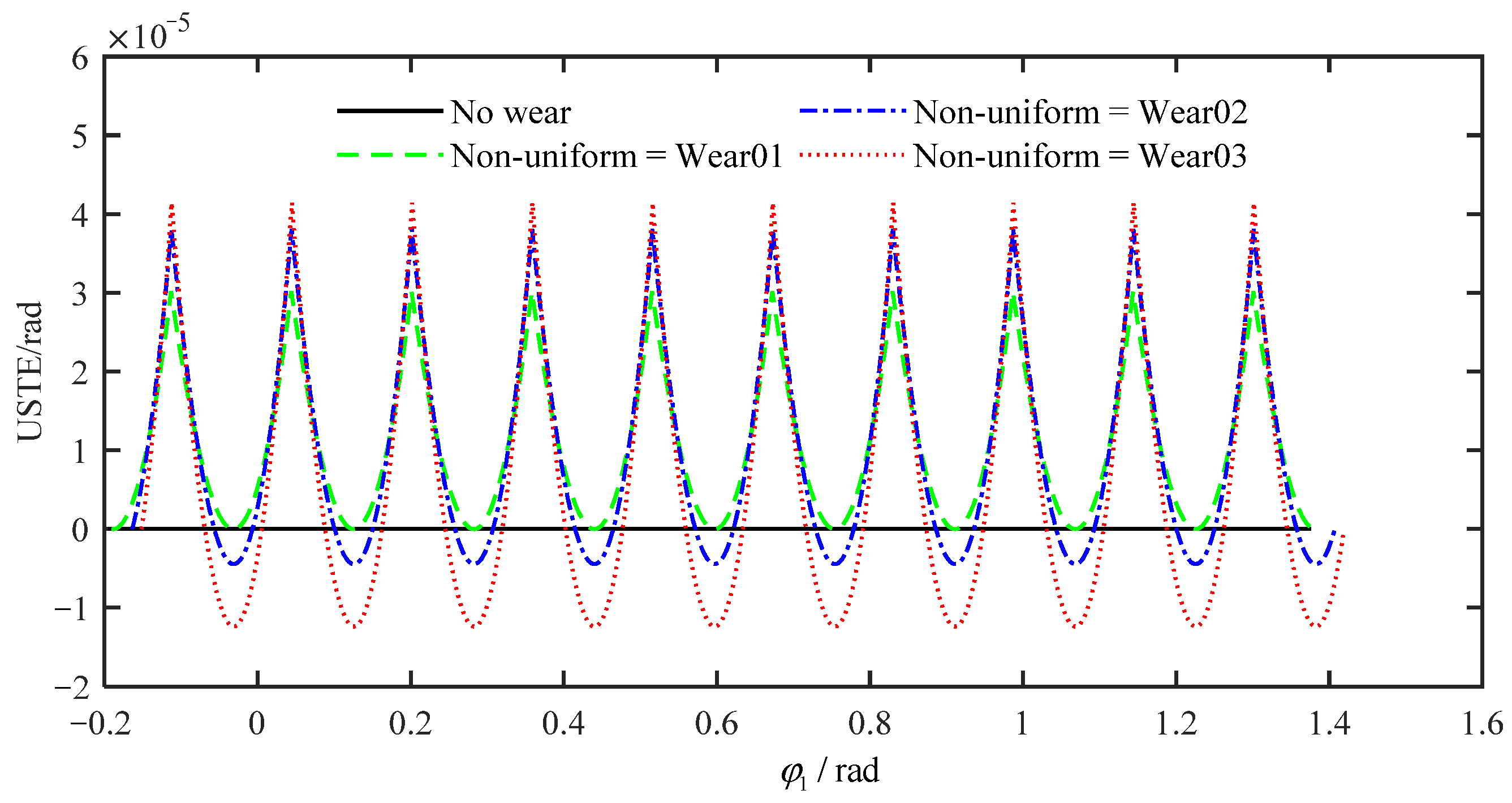
- According to the new mesh relationship and multi-tooth mesh rule, USTE is comprehensively analyzed. The results indicate that the USTE varies periodically as the gear pair meshing and its amplitude grows with the increase of the wear depth. The effectiveness of the proposed model is verified by the finite element method.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Flodin, A.; Andersson, S. Simulation of mild wear in spur gears. Wear 1997, 207, 16–23. [Google Scholar] [CrossRef]
- Flodin, A.; Andersson, S. Simulation of mild wear in helical gears. Wear 2000, 241, 123–128. [Google Scholar] [CrossRef]
- Bajpai, P.; Kahraman, A.; Anderson, N.E. A Surface Wear Prediction Methodology for Parallel-Axis Gear Pairs. J. Tribol. 2004, 126, 597–605. [Google Scholar] [CrossRef]
- Ding, H.L. Dynamic Wear Models for Gear Systems. Ph.D. Thesis, The Ohio State University, Columbus, OH, USA, 2007. [Google Scholar]
- Akbarzadeh, S.; Khonsari, M.M. Prediction of Steady State Adhesive Wear in Spur Gears Using the EHL Load Sharing Concept. J. Tribol. 2009, 131, 024503. [Google Scholar] [CrossRef]
- Osman, T.; Velex, P. Static and dynamic simulations of mild abrasive wear in wide-faced solid spur and helical gears. Mech. Mach. Theory 2010, 45, 911–924. [Google Scholar] [CrossRef]
- Tunalioğlu, M.; Tuç, B. Theoretical and experimental investigation of wear in internal gears. Wear 2014, 309, 208–215. [Google Scholar] [CrossRef]
- Wojnarowski, J.; Onishchenko, V. Tooth wear effects on spur gear dynamics. Mech. Mach. Theory 2003, 38, 161–178. [Google Scholar] [CrossRef]
- Kuang, J.H.; Lin, A.D. The Effect of Tooth Wear on the Vibration Spectrum of a Spur Gear Pair. J. Vib. Acoust. 2001, 123, 311–317. [Google Scholar] [CrossRef]
- Yuksel, C.; Kahraman, A. Dynamic tooth loads of planetary gear sets having tooth profile wear. Mech. Mach. Theory 2004, 39, 695–715. [Google Scholar] [CrossRef]
- Wu, S.; Zhang, H.; Wang, X.; Peng, Z.; Yang, K.; Zhu, W. Influence of the backlash generated by tooth accumulated wear on dynamic behavior of compound planetary gear set. Proc. Inst. Mech. Eng. Part C J. Mech. Eng. Sci. 2016, 231, 2025–2041. [Google Scholar] [CrossRef]
- Lundvall, O.; Klarbring, A. Prediction of Transmission Error in Spur Gears as a Consequence of Wear. Mech. Struct. Mach. 2001, 29, 431–449. [Google Scholar] [CrossRef]
- Atanasiu, V.; Oprişan, C.; Leohchi, D. The Effect of Tooth Wear on the Dynamic Transmission Error of Helical Gears with Smaller Number of Pinion Teeth. Appl. Mech. Mater. 2014, 657, 649–653. [Google Scholar] [CrossRef]
- Chin, Z.Y.; Smith, W.A.; Borghesani, P.; Randall, R.B.; Peng, Z. Absolute transmission error: A simple new tool for assessing gear wear. Mech. Syst. Signal Process. 2021, 146, 107070. [Google Scholar] [CrossRef]
- Feng, K.; Smith, W.A.; Borghesani, P.; Randall, R.B.; Peng, Z. Use of cyclostationary properties of vibration signals to identify gear wear mechanisms and track wear evolution. Mech. Syst. Signal Process. 2021, 150, 107258. [Google Scholar] [CrossRef]
- Choy, F.; Polyshchuk, V.; Zakrajsek, J.; Handschuh, R.; Townsend, D. Analysis of the effects of surface pitting and wear on the vibration of a gear transmission system. Tribol. Int. 1996, 29, 77–83. [Google Scholar] [CrossRef]
- Yesilyurt, I.; Gu, F.; Ball, A.D. Gear tooth stiffness reduction measurement using modal analysis and its use in wear fault severity assessment of spur gears. NDT E Int. 2003, 36, 357–372. [Google Scholar] [CrossRef]
- Liu, X.; Yang, Y.; Zhang, J. Investigation on coupling effects between surface wear and dynamics in a spur gear system. Tribol. Int. 2016, 101, 383–394. [Google Scholar] [CrossRef]
- Huangfu, Y.; Zhao, Z.; Ma, H.; Han, H.; Chen, K. Effects of tooth modifications on the dynamic characteristics of thin-rimmed gears under surface wear. Mech. Mach. Theory 2020, 150, 103870. [Google Scholar] [CrossRef]
- Brethee, K.F.; Zhen, D.; Gu, F.; Ball, A.D. Helical gear wear monitoring: Modelling and experimental validation. Mech. Mach. Theory 2017, 117, 210–229. [Google Scholar] [CrossRef]
- Chen, W.; Lei, Y.; Fu, Y.; Hou, L. A study of effects of tooth surface wear on time-varying mesh stiffness of external spur gear considering wear evolution process. Mech. Mach. Theory 2021, 155, 104055. [Google Scholar] [CrossRef]
- Shen, Z.; Qiao, B.; Yang, L.; Luo, W.; Chen, X. Evaluating the influence of tooth surface wear on TVMS of planetary gear set. Mech. Mach. Theory 2019, 136, 206–223. [Google Scholar] [CrossRef]
- Shen, Z.; Qiao, B.; Yang, L.; Luo, W.; Yang, Z.; Chen, X. Fault mechanism and dynamic modeling of planetary gear with gear wear. Mech. Mach. Theory 2021, 155, 104098. [Google Scholar] [CrossRef]
- Liang, X.; Zuo, M.J.; Pandey, M. Analytically evaluating the influence of crack on the mesh stiffness of a planetary gear set. Mech. Mach. Theory 2014, 76, 20–38. [Google Scholar] [CrossRef]
- Ma, H.; Pang, X.; Feng, R.; Song, R.; Wen, B. Fault features analysis of cracked gear considering the effects of the extended tooth contact. Eng. Fail. Anal. 2015, 48, 105–120. [Google Scholar] [CrossRef]
- Huangfu, Y.; Chen, K.; Ma, H.; Li, X.; Han, H.; Zhao, Z. Meshing and dynamic characteristics analysis of spalled gear systems: A theoretical and experimental study. Mech. Syst. Signal Process. 2020, 139, 106640. [Google Scholar] [CrossRef]
- Chaari, F.; Fakhfakh, T.; Haddar, M. Analytical modelling of spur gear tooth crack and influence on gear mesh stiffness. Eur. J. Mech. A Solids 2009, 28, 461–468. [Google Scholar] [CrossRef]
- Ma, H.; Li, Z.; Feng, M.; Feng, R.; Wen, B. Time-varying mesh stiffness calculation of spur gears with spalling defect. Eng. Fail. Anal. 2016, 66, 166–176. [Google Scholar] [CrossRef]
- Lei, Y.; Liu, Z.; Wang, D.; Yang, X.; Liu, H.; Lin, J. A probability distribution model of tooth pits for evaluating time-varying mesh stiffness of pitting gears. Mech. Syst. Signal Process. 2018, 106, 355–366. [Google Scholar] [CrossRef]
- El Yousfi, B.; Soualhi, A.; Medjaher, K.; Guillet, F. New approach for gear mesh stiffness evaluation of spur gears with surface defects. Eng. Fail. Anal. 2020, 116, 104740. [Google Scholar] [CrossRef]
- Wang, X.; Yang, Y.; Wang, W.; Chi, W. Simulating coupling behavior of spur gear meshing and fatigue crack propagation in tooth root. Int. J. Fatigue 2020, 134, 105381. [Google Scholar] [CrossRef]
- Wu, J.; Yang, Y.; Wang, P.; Wang, J.; Cheng, J. A novel method for gear crack fault diagnosis using improved analytical-FE and strain measurement. Measurement 2020, 163, 107936. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Items | Driving/Driven Gear | Items | Driving/Driven Gear |
|---|---|---|---|
| Tooth number | 40/100 | Base circle radius (mm) | 112.8/281.9 |
| Tooth width (mm) | 50 | Root circle radius (mm) | 112.5/307.5 |
| Pressure angle (°) | 20 | Center distance (mm) | 180 |
| Module (mm) | 6 | Tooth root angle (rad) | 0.1540/0.3872 |
| Poisson’s ratio | 0.3 | Tooth tip angle (rad) | 0.4444/0.0542 |
| Young’s modulus (Pa) | 2.05 × 1011 | Number of meshing points | 1849 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Y.; Li, K.; Qiao, B.; Shen, Z.; Chen, X. Theoretical Investigation of Mesh Relationship and Mesh Stiffness of Internal Spur Gears with Tooth Wear. Appl. Sci. 2023, 13, 2022. https://doi.org/10.3390/app13032022
Wang Y, Li K, Qiao B, Shen Z, Chen X. Theoretical Investigation of Mesh Relationship and Mesh Stiffness of Internal Spur Gears with Tooth Wear. Applied Sciences. 2023; 13(3):2022. https://doi.org/10.3390/app13032022
Chicago/Turabian StyleWang, Yanan, Keyuan Li, Baijie Qiao, Zhixian Shen, and Xuefeng Chen. 2023. "Theoretical Investigation of Mesh Relationship and Mesh Stiffness of Internal Spur Gears with Tooth Wear" Applied Sciences 13, no. 3: 2022. https://doi.org/10.3390/app13032022
APA StyleWang, Y., Li, K., Qiao, B., Shen, Z., & Chen, X. (2023). Theoretical Investigation of Mesh Relationship and Mesh Stiffness of Internal Spur Gears with Tooth Wear. Applied Sciences, 13(3), 2022. https://doi.org/10.3390/app13032022