A Nonlinear Convolutional Neural Network-Based Equalizer for Holographic Data Storage Systems


Abstract
:1. Introduction
- -
- We proposed a CNN-based equalizer for the HDS systems.
- -
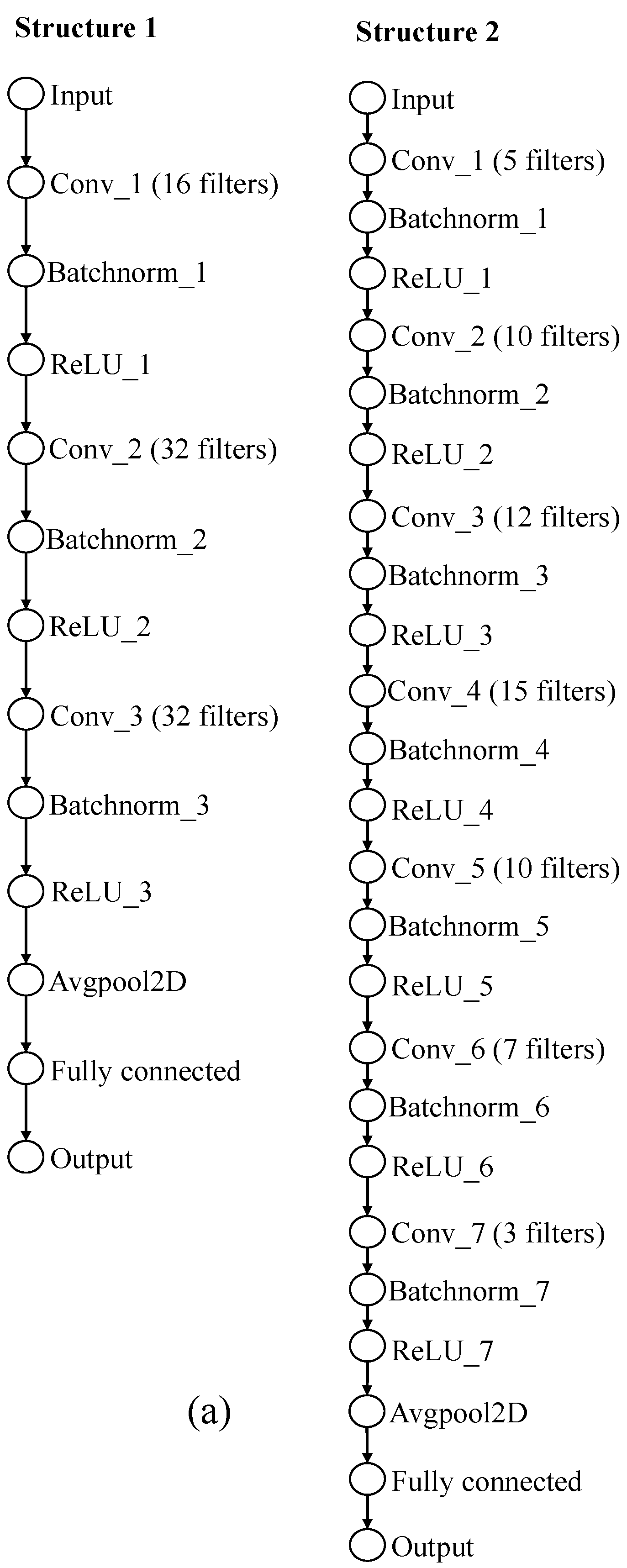
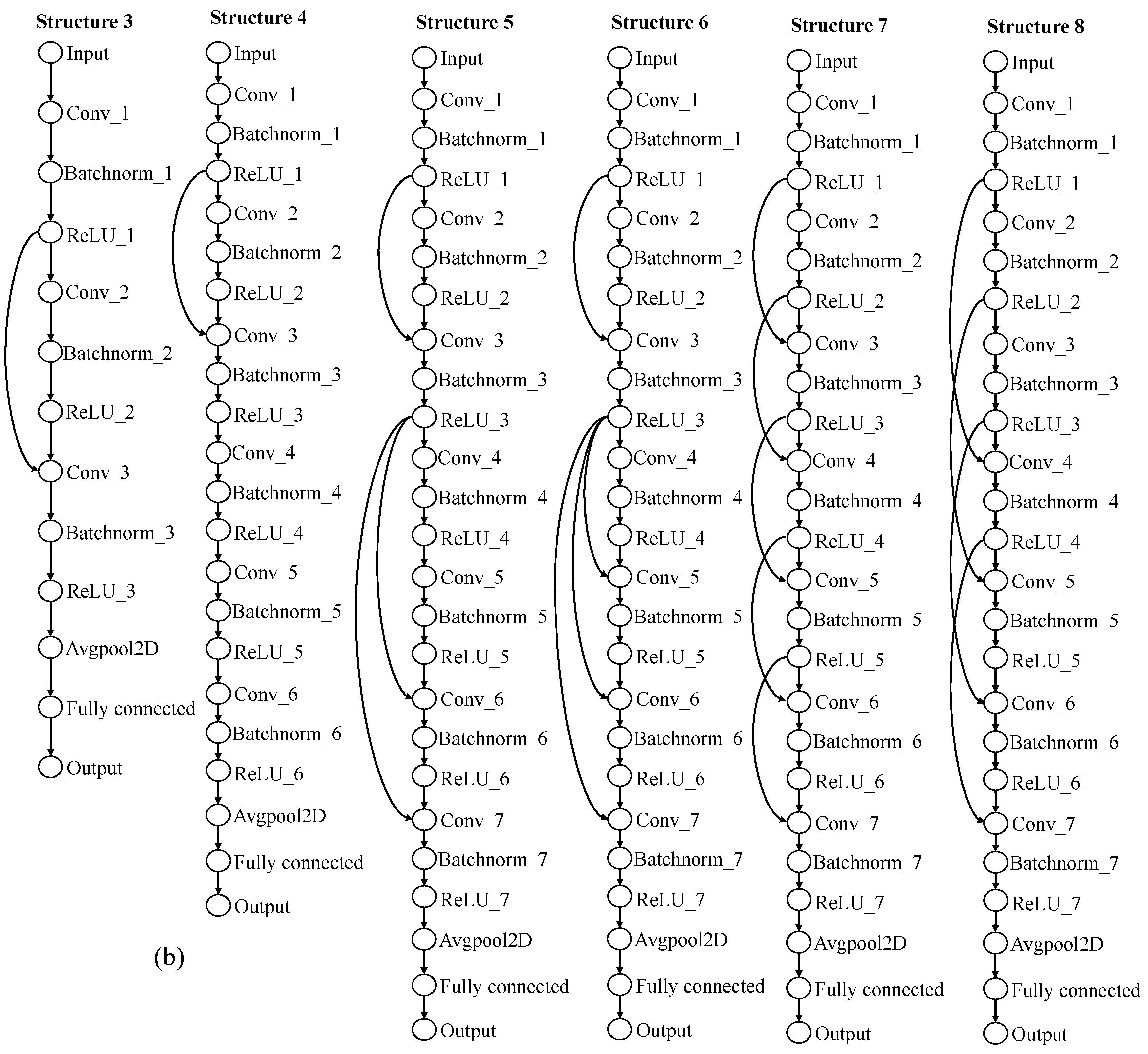
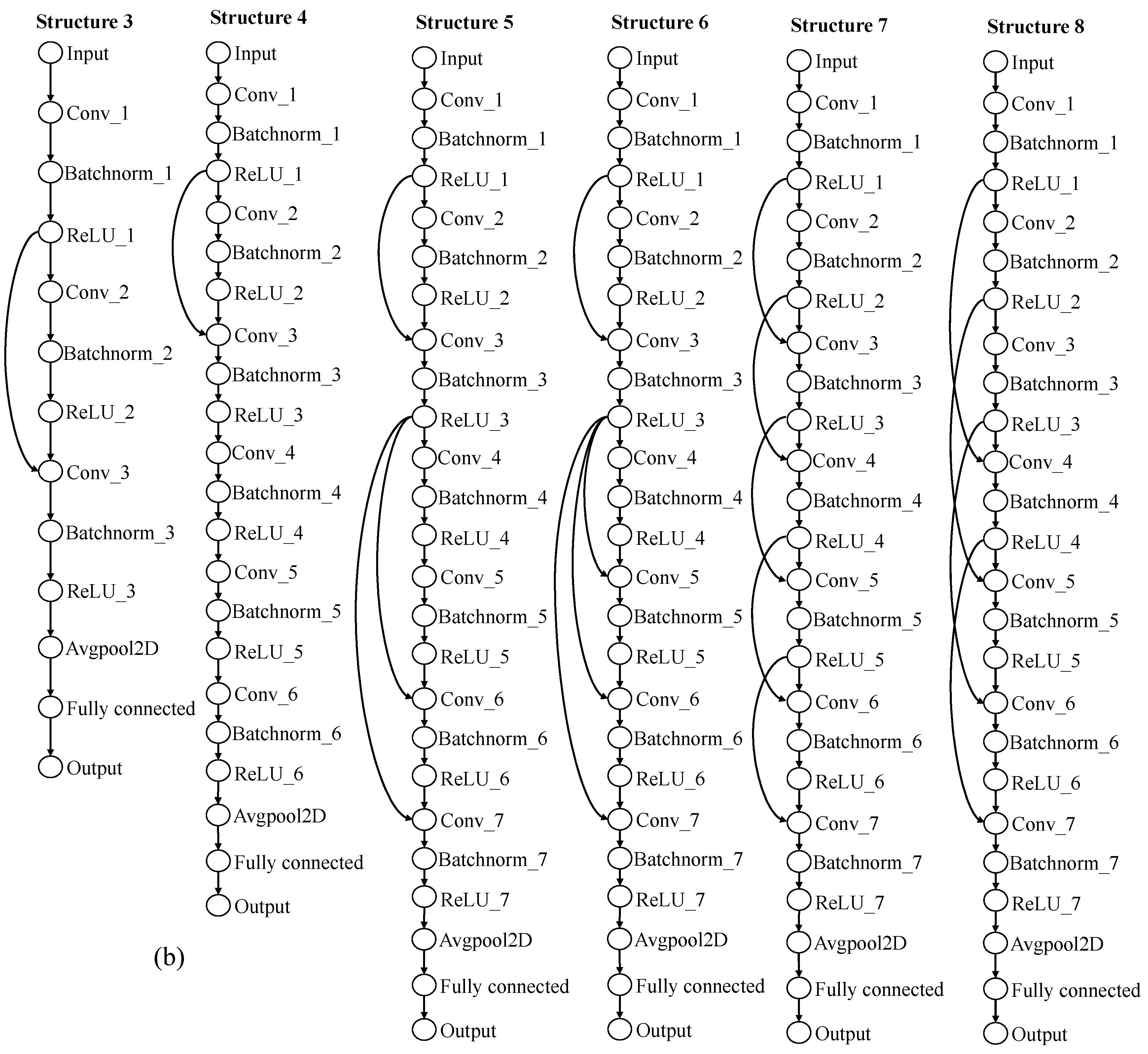
- We optimized the best structure of the CNN (between straight and branch structures) for the 2D equalizer.
- -
- We analyzed and explained the properties of CNN structures.
- -
- We presented simulation results to verify the performance of the CNN-based equalizer.
2. Background
3. Proposed Model
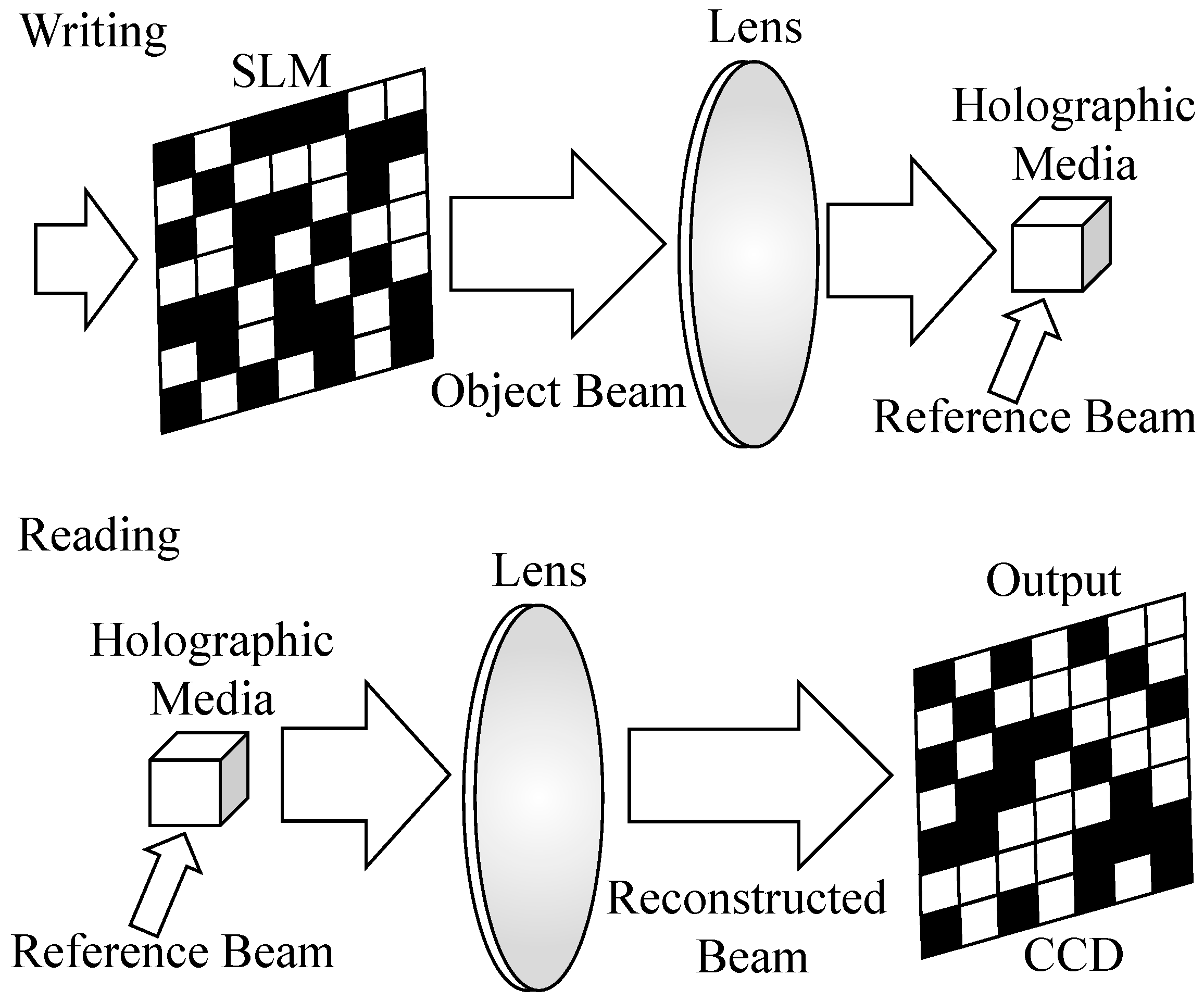
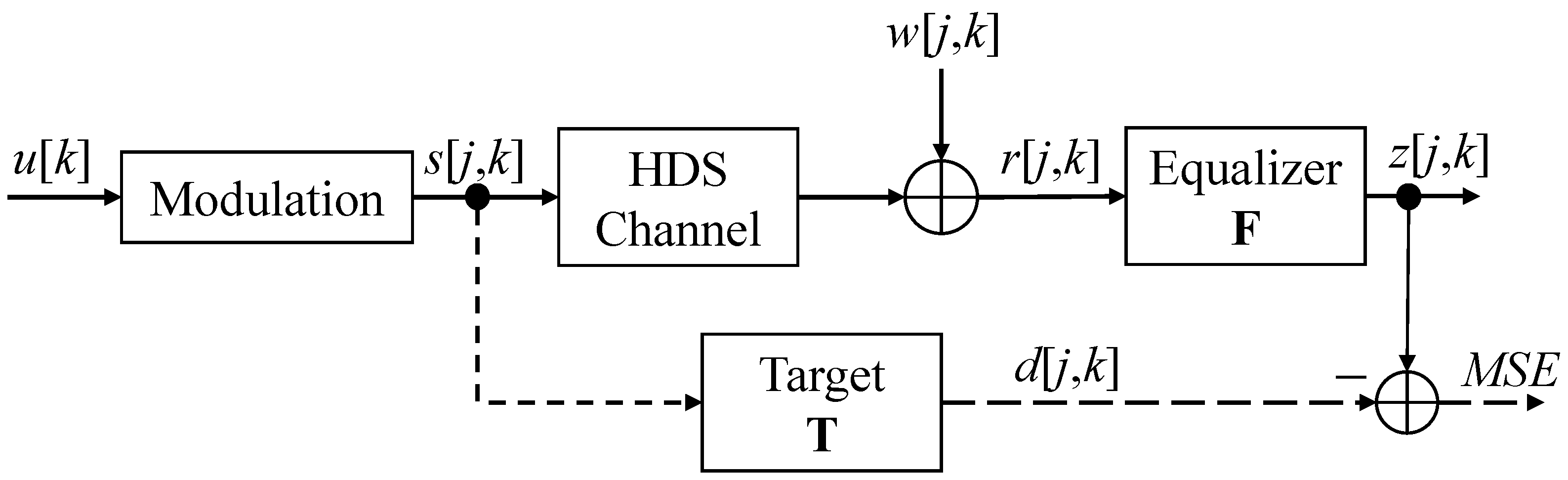
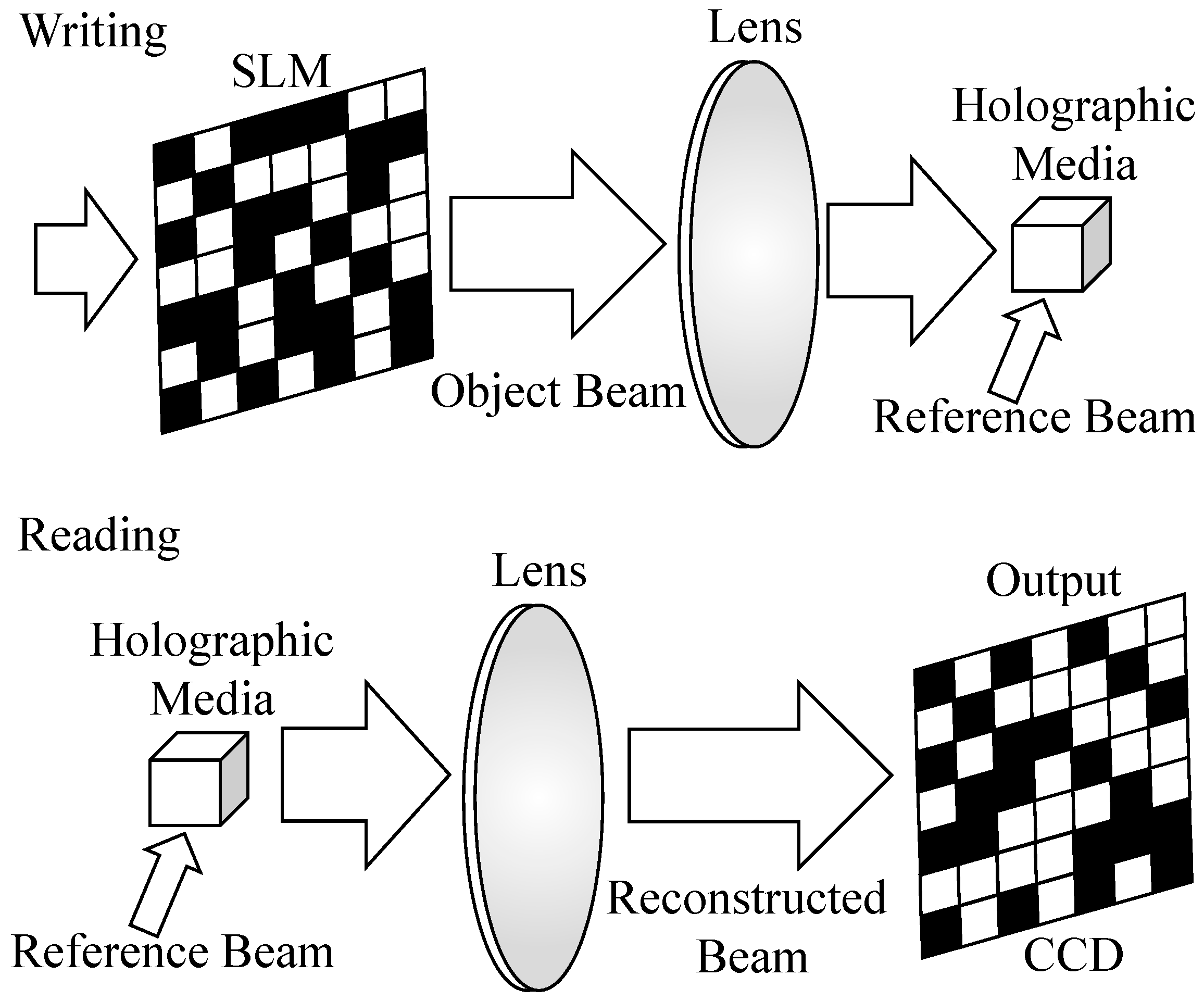
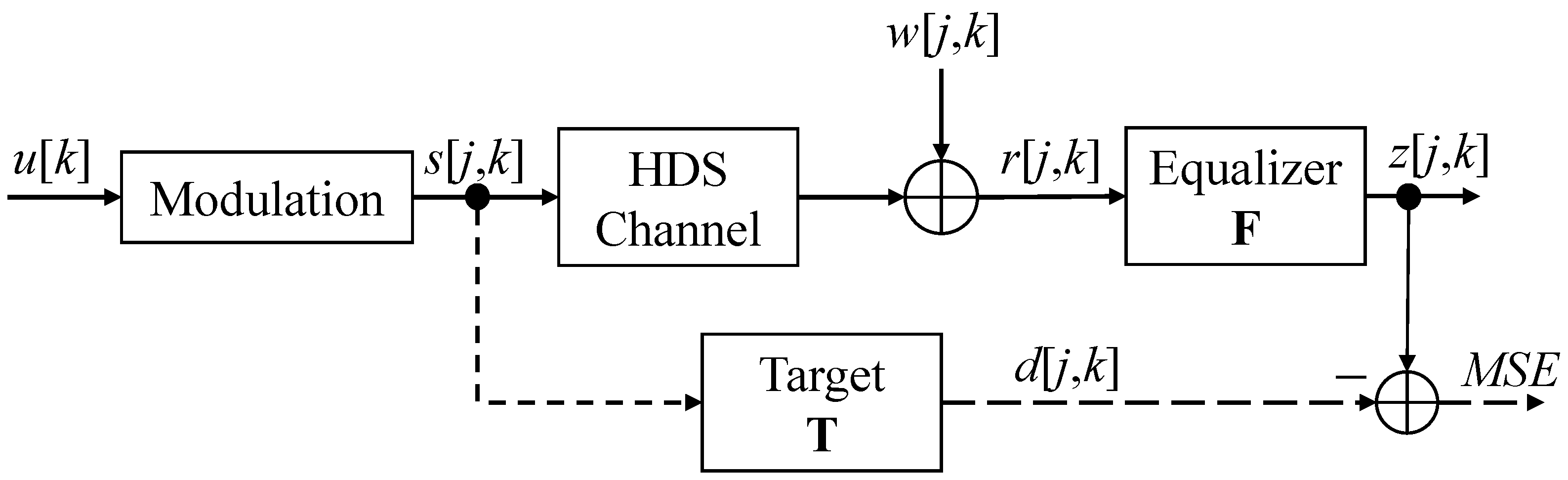
3.1. Channel Modeling
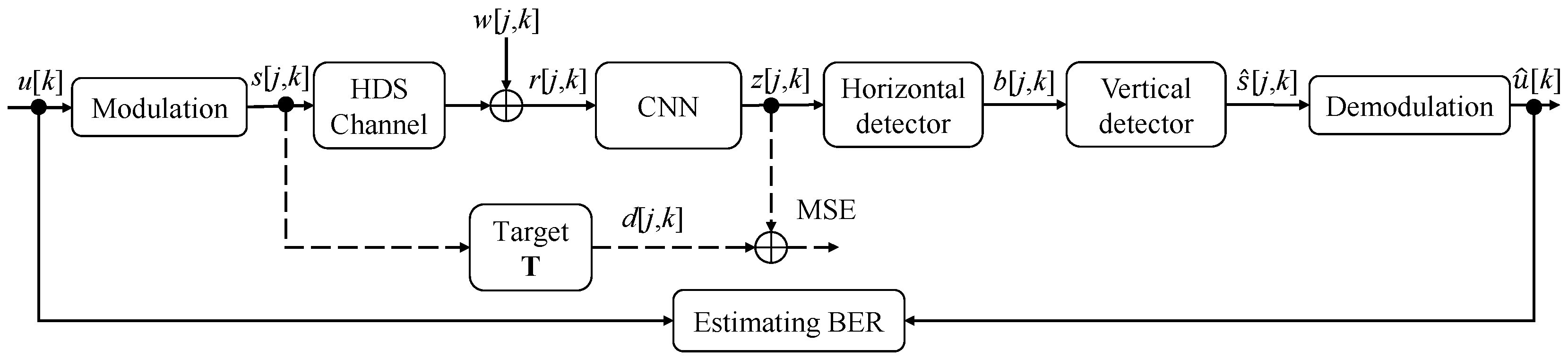
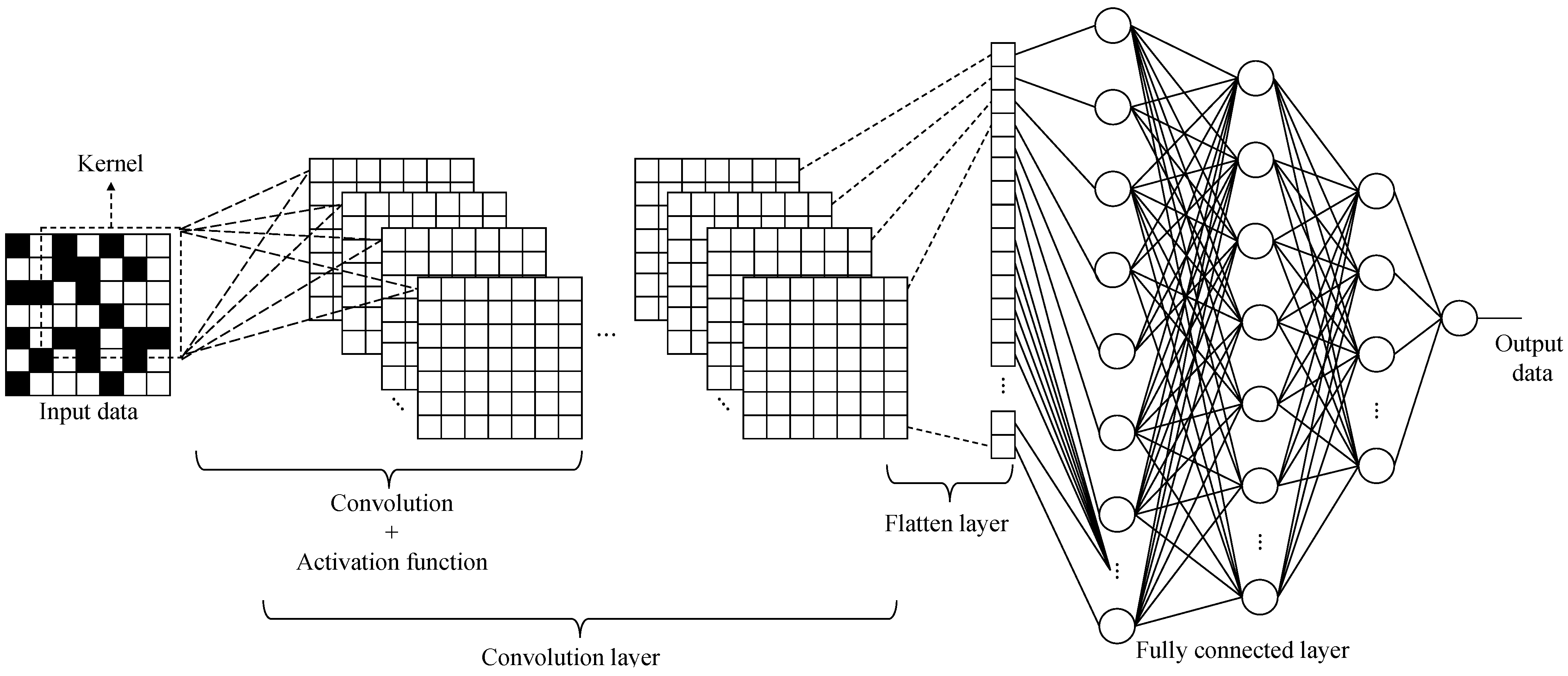
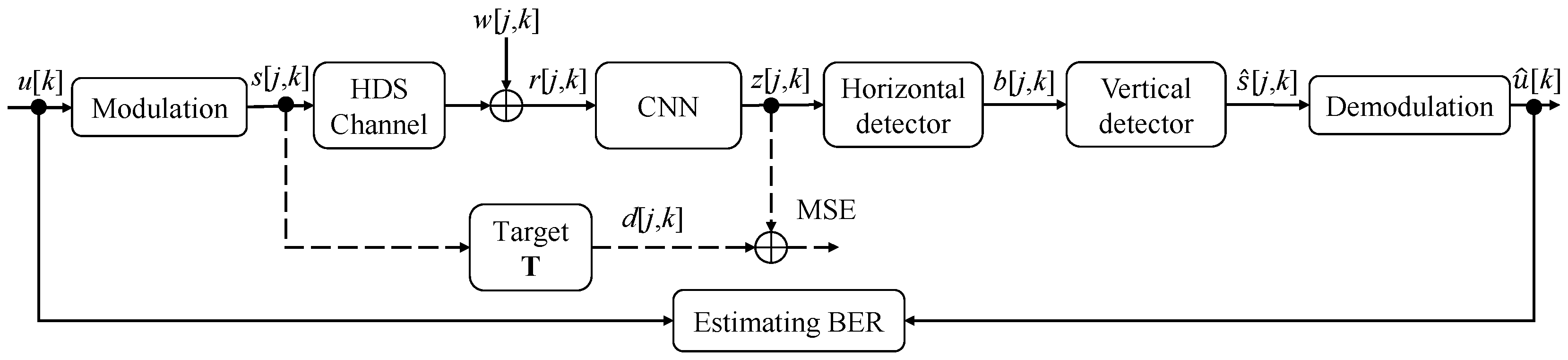
3.2. Proposed Nonlinear Equalizer
- Use MMSE algorithm, as specified in Section 2, to estimate conventional equalizer F and target T.
- Collect signals d[j,k] and r[j,k] when estimating F and T.
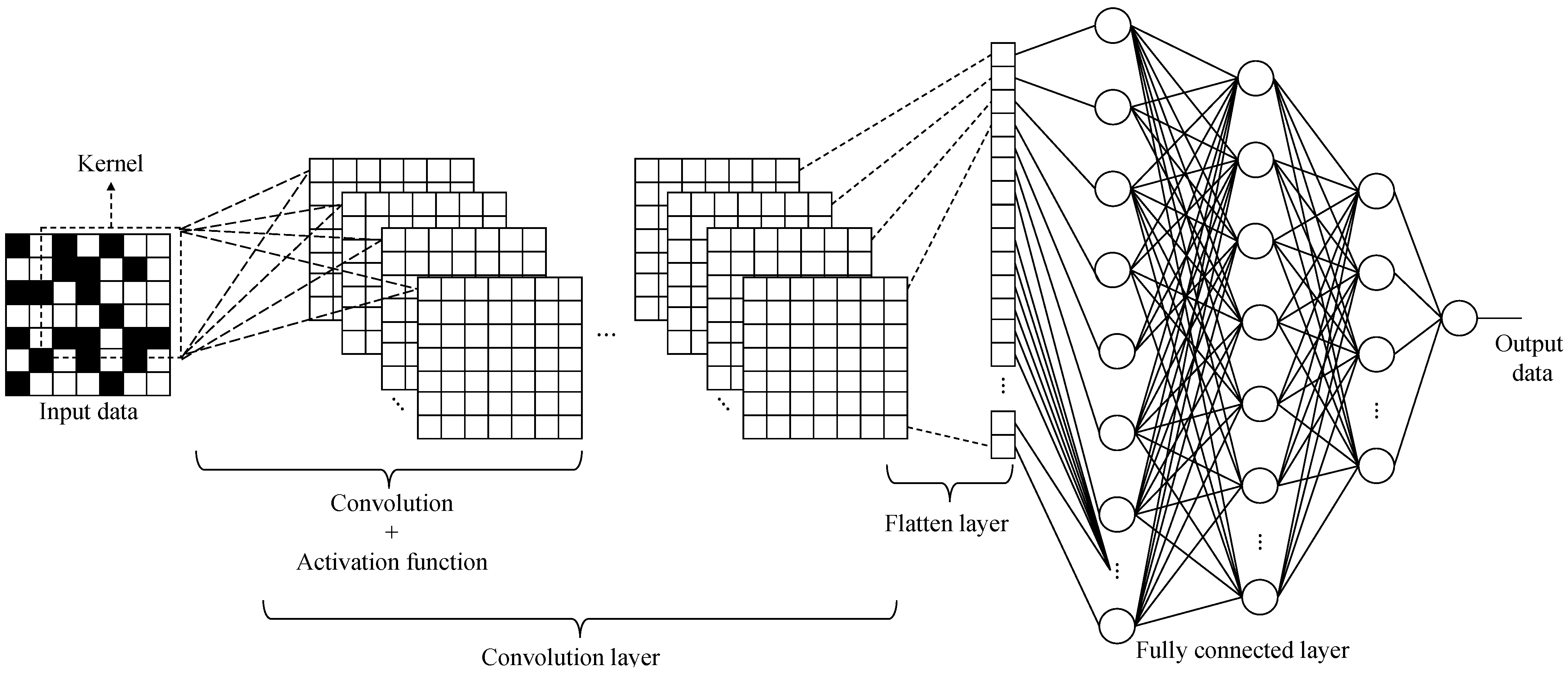
- Use signal r[j,k] as the input and signal d[j,k] as the label for the CNN model in the training process.
- Replace equalizer F with the trained CNN model.
- Structure 3: [16 32 32].
- Structure 4: [7 10 12 15 10 7].
- Structure 5: [5 10 12 15 10 7 3].
- Structure 6: [5 10 12 15 10 7 3].
- Structure 7: [5 10 12 15 10 7 3].
- Structure 8: [5 10 12 15 10 7 3].
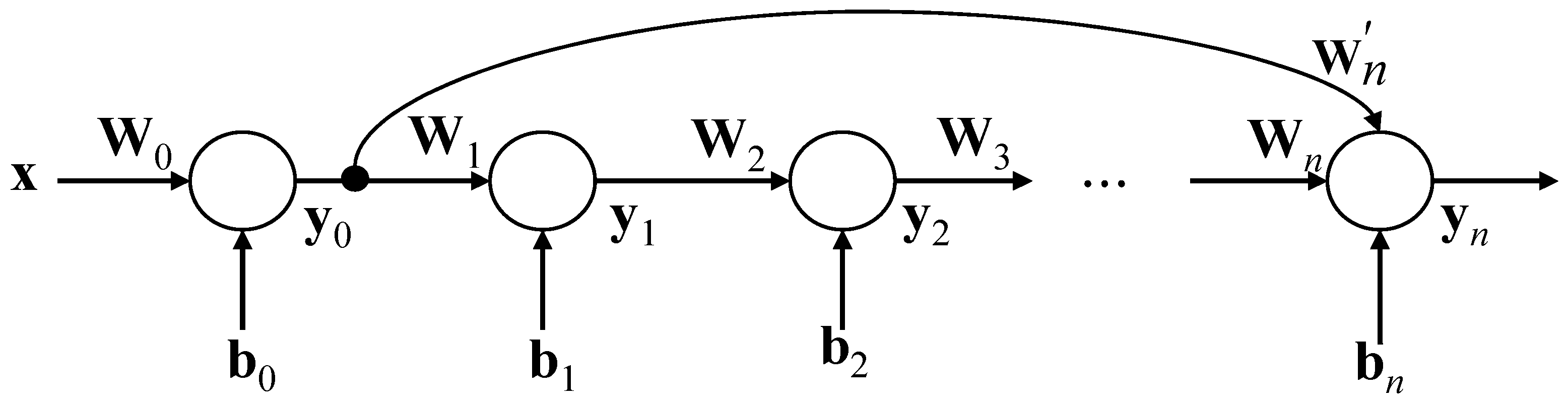
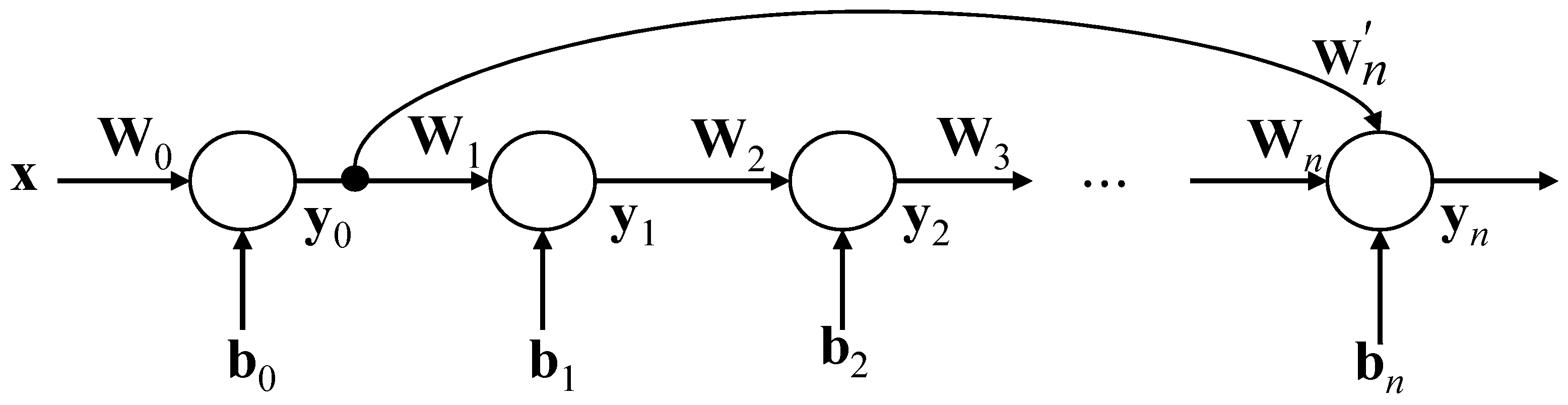
3.3. Improving CNN Equalizer with Skipping Branch
4. Simulations
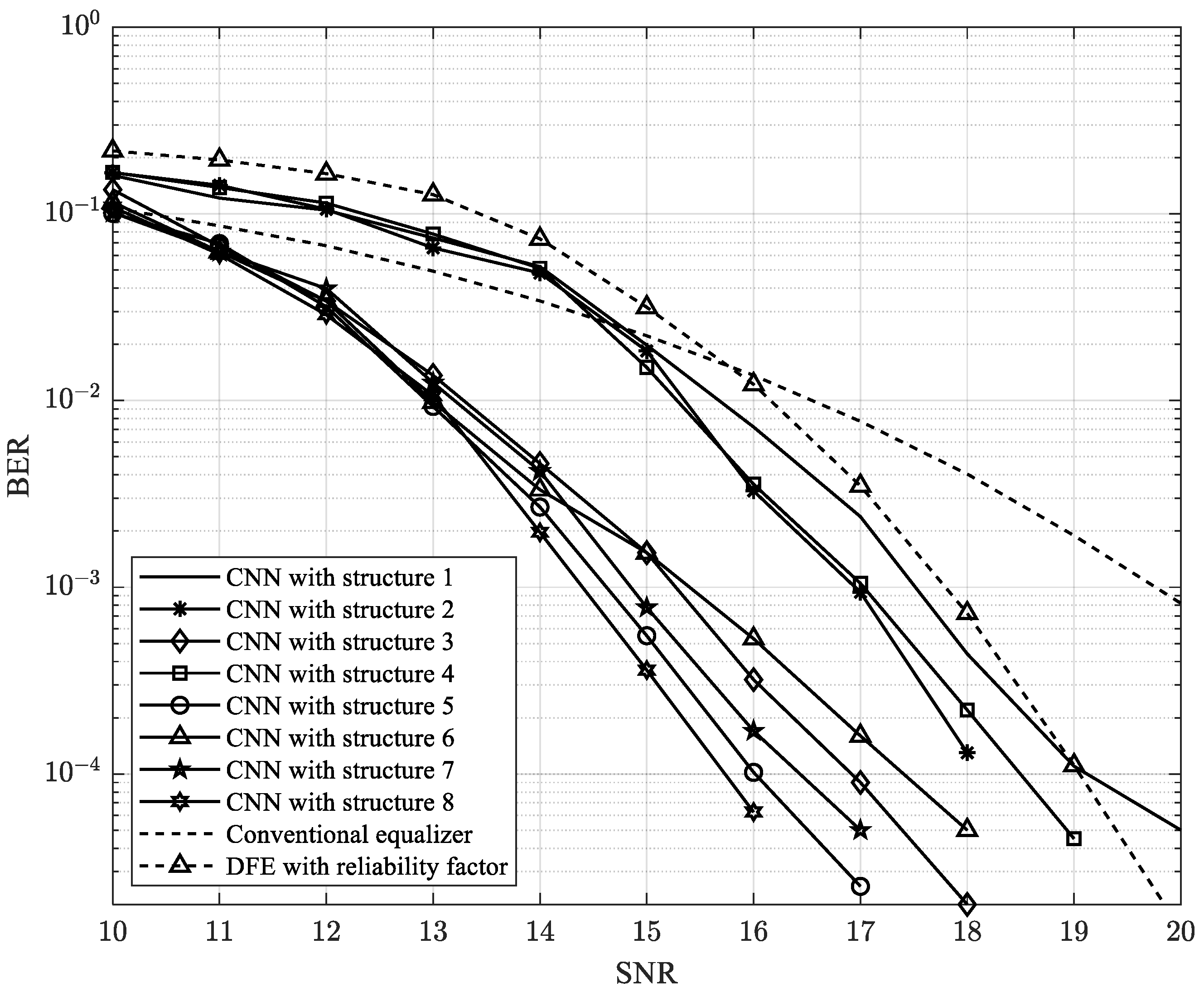
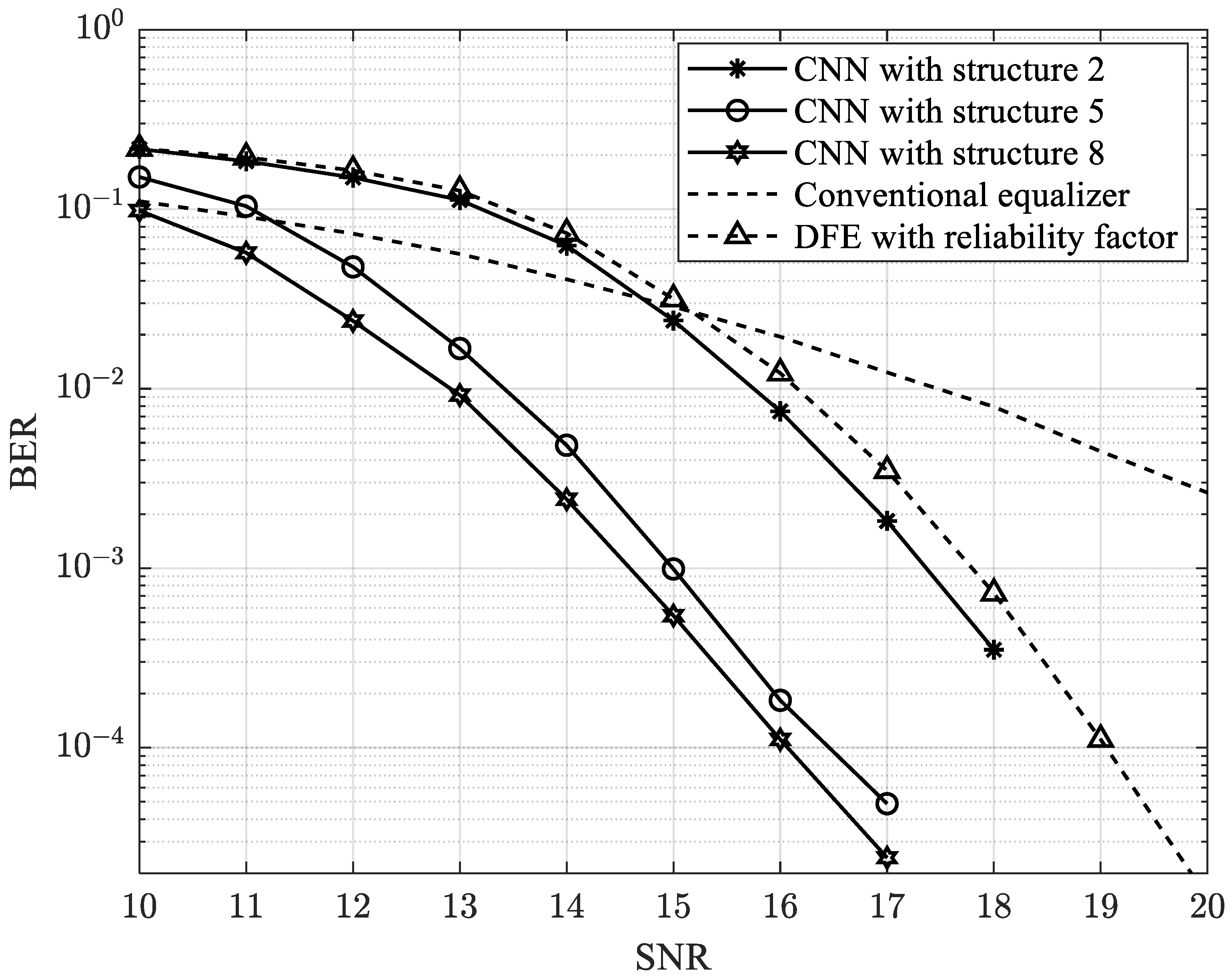
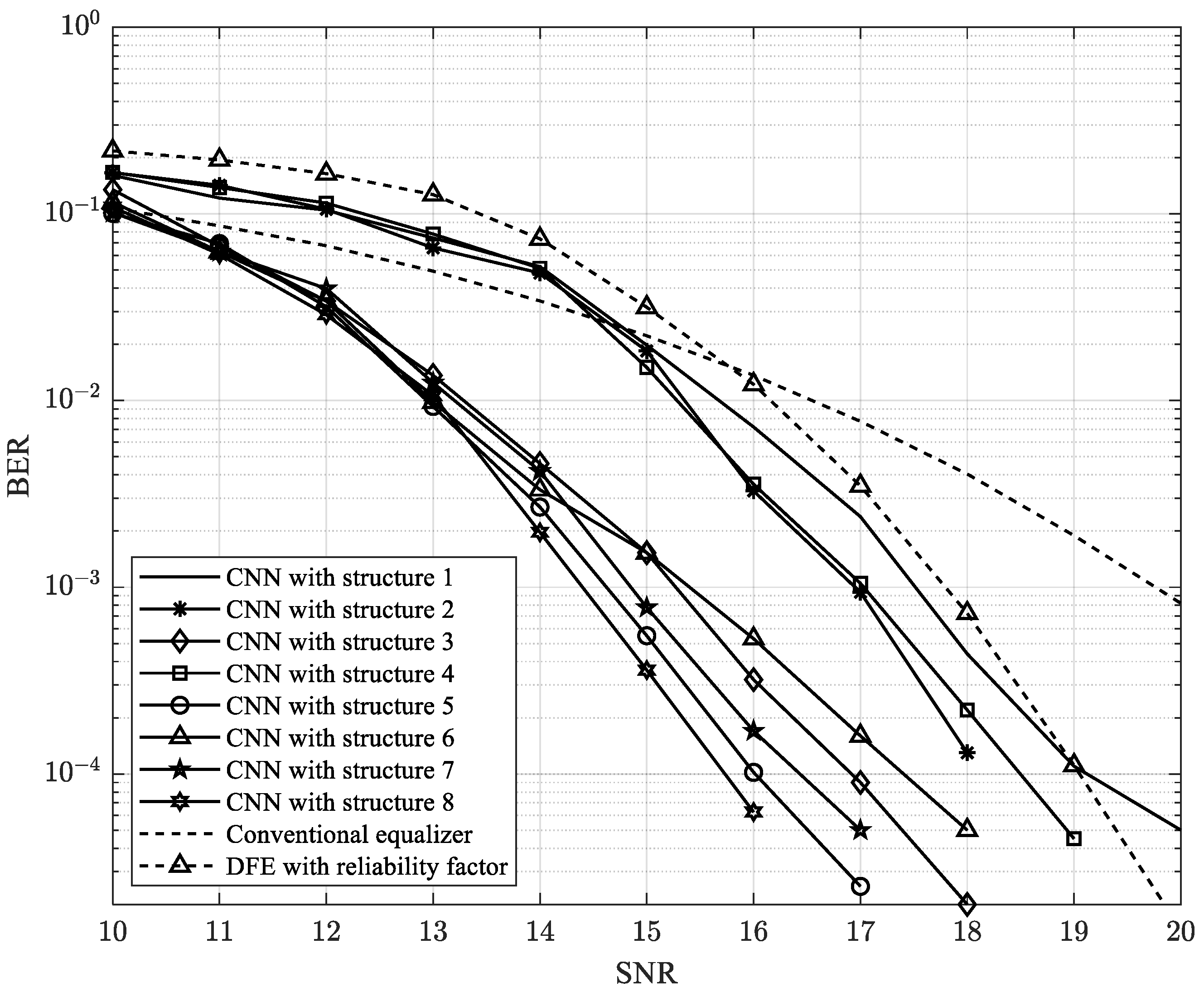
4.1. Results and Discussions
4.2. Complexity and Latency
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- David, R.; John, G.; John, R. Data Age 2025: The Digitization of the World, from Edge to Core; IDC White Paper; Seagate: Dublin, Ireland, 2018. [Google Scholar]
- Kim, K.; Kim, S.H.; Koo, G.; Seo, M.S.; Kim, S.W. Decision feedback equalizer for holographic data storage. Appl. Opt. 2018, 57, 4056–4066. [Google Scholar] [CrossRef]
- Hesselink, L.; Orlov, S.S.; Bashaw, M.C. Holographic data storage systems. Proc. IEEE 2004, 92, 1231–1280. [Google Scholar] [CrossRef]
- Wilson, W.Y.H.; Immink, K.A.S.; Xi, X.B.; Chong, T.C. Efficient coding technique for holographic storage using the method of guided scrambling. Proc. SPIE 2000, 4090, 191–196. [Google Scholar]
- Koo, K.; Kim, S.Y.; Jeong, J.J.; Kim, S.W. Two-dimensional soft output viterbi algorithm with a variable reliability factor for holographic data storage. Jpn. J. Appl. Phys. 2013, 52, 09LE03. [Google Scholar] [CrossRef]
- Wang, Z.; Jin, G.F.; He, Q.S.; Wu, M.X. Simultaneous defocusing of the aperture and medium on a spectroholographic storage system. Appl. Opt. 2007, 46, 5770–5778. [Google Scholar] [CrossRef]
- Shelby, R.M.; Hoffnagle, J.A.; Burr, G.W.; Jefferson, C.M.; Bernal, M.P.; Coufal, H.; Grygier, R.K.; Gunther, H.; Macfarlane, R.M.; Sincerbox, G.T. Pixel-matched holographic data storage with megabit pages. Opt. Lett. 1997, 22, 1509–1511. [Google Scholar] [CrossRef] [PubMed]
- Burr, G.W.; Mok, F.H.; Psaltis, D. Angle and space multiplexed holographic storage using the 90° geometry. Opt. Commun. 1995, 117, 49–55. [Google Scholar] [CrossRef]
- Yu, F.T.; Wu, S.; Mayers, A.W.; Rajan, S. Wavelength multiplexed reflection matched spatial filters using LiNbO3. Opt. Commun. 1991, 81, 343–347. [Google Scholar] [CrossRef]
- Rakuljic, G.A.; Leyva, V.; Yariv, A.; Yeh, P.; Gu, C. Optical data storage by using orthogonal wavelength-multiplexed volume holograms. Opt. Lett. 1992, 17, 1471–1473. [Google Scholar] [CrossRef]
- Krile, T.F.; Hagler, M.O.; Redus, W.D.; Walkup, J.F. Multiplex holography with chirp-modulated binary phase-coded referencebeam masks. Appl. Opt. 1979, 18, 52–56. [Google Scholar] [CrossRef]
- Ishii, N.; Katano, Y.; Muroi, T.; Kinoshita, N. Spatially coupled low-density parity-check error correction for holographic data storage. Jpn. J. Phys. 2017, 56, 09NA03. [Google Scholar] [CrossRef]
- Cideciyan, R.; Dolivo, F.; Hermann, R.; Hirt, W.; Schott, W. A PRML system for digital magnetic recording. IEEE J. Sel. Areas Commun. 1992, 10, 38–56. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J. Two-dimensional SOVA and LDPC codes for holographic data storage system. IEEE Trans. Magn. 2009, 45, 2260–2263. [Google Scholar]
- He, A.; Mathew, G. Nonlinear equalization for holographic data storage systems. Appl. Opt. 2006, 45, 2731–2741. [Google Scholar] [CrossRef] [PubMed]
- Koo, K.; Kim, S.-Y.; Jeong, J.J.; Kim, S.W. Two-dimensional soft output Viterbi algorithm with dual equalizers for bit-patterned media. IEEE Trans. Magn. 2013, 49, 2555–2558. [Google Scholar] [CrossRef]
- Kim, J.; Lee, J. Iterative two-dimensional soft output Viterbi algorithm for patterned media. IEEE Trans. Magn. 2011, 47, 594–597. [Google Scholar] [CrossRef]
- Nabavi, S.; Kumar, B.V.K.V. Two-dimensional generalized partial response equalizer for bit-patterned media. In Proceedings of the IEEE International Conference on Communications, Glasgow, UK, 24–28 June 2007; pp. 6249–6254. [Google Scholar]
- Nguyen, T.A.; Lee, J. Serial maximum a posteriori detection of two-dimensional generalized partial response target for holographic data storage systems. Appl. Sci. 2023, 13, 5247. [Google Scholar] [CrossRef]
- Koo, K.; Kim, S.-Y.; Kim, S. Modified two-dimensional soft output viterbi algorithm with two-dimensional partial response target for holographic data storage. Jpn. J. Phys. 2012, 51, 08JB03. [Google Scholar] [CrossRef]
- Koo, K.; Kim, S.-Y.; Jeong, J.; Kim, S. Data page reconstruction method based on two-dimensional soft output Viterbi algorithm with self reference for holographic data storage. Opt. Rev. 2013, 21, 591. [Google Scholar] [CrossRef]
- Lee, S.-H.; Lim, S.-Y.; Kim, N.; Park, N.-C.; Yang, H.; Park, K.-S.; Park, Y.-P. Increasing the storage density of a page-based holographic data storage system by image upscaling using the PSF of the Nyquist aperture. Opt. Express 2011, 19, 12053––12065. [Google Scholar] [CrossRef]
- Kim, D.-H.; Jeon, S.; Park, N.-C.; Park, K.-S. Iterative design method for an image filter to improve the bit error rate in holographic data storage systems. Microsyst. Technol. 2014, 20, 1661–1669. [Google Scholar] [CrossRef]
- Kim, H.; Jeon, S.; Cho, J.; Kim, D.-H.; Park, N.-C. An image filter based on primary frequency analysis to improve the bit error rate in holographic data storage systems. Microsyst. Technol. 2016, 22, 1359–1365. [Google Scholar] [CrossRef]
- Chen, C.-Y.; Fu, C.-C.; Chiueh, T.-D. Low-complexity pixel detection for images with misalignment and interpixel interference in holographic data storage. Appl. Opt. 2008, 47, 6784–6795. [Google Scholar] [CrossRef]
- Hoang, H.A.; Yoo, M. 3ONet: 3-D Detector for Occluded Object Under Obstructed Conditions. IEEE Sens. J. 2023, 23, 18879–18892. [Google Scholar] [CrossRef]
- Shaoshuai, S.; Zhe, W.; Jianping, S.; Xiaogang, W.; Hongsheng, L. From points to parts: 3d object detection from point cloud with part-aware and part-aggregation network. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 43, 2647–2664. [Google Scholar]
- Duong, M.-T.; Hong, M.-C. EBSD-Net: Enhancing brightness and suppressing degradation for low-light color image using deep networks. In Proceedings of the 2022 IEEE International Conference on Consumer Electronics-Asia (ICCE-Asia), Yeosu, Republic of Korea, 26–28 October 2022. [Google Scholar]
- Wang, W.; Wu, X.; Yuan, X.; Gao, Z. An experiment-based review of low-light image enhancement methods. IEEE Access 2020, 8, 87884–87917. [Google Scholar] [CrossRef]
- Nguyen-Vu, L.; Doan, T.-P.; Bui, M.; Hong, K.; Jung, S. On the defense of spoofing countermeasures against adversarial attacks. IEEE Access 2023, 11, 94563–94574. [Google Scholar] [CrossRef]
- Cisse, M.M.; Adi, Y.; Neverova, N.; Keshet, J. Houdini: Fooling deep structured visual and speech recognition models with adversarial examples. Proc. Adv. Neural Inf. Process. Syst. 2017, 30, 6980–6990. [Google Scholar]
- Jeong, S.; Lee, J. Bit-flipping scheme using k-means algorithm for bit-patterned media recording. Appl. Sci. 2022, 58, 3101704. [Google Scholar] [CrossRef]
- Jeong, S.; Lee, J. Iterative signal detection scheme using multilayer perceptron for a bit-patterned media recording system. Appl. Sci. 2020, 10, 8819. [Google Scholar] [CrossRef]
- Sayyafan, A.; Aboutaleb, A.; Belzel, B.J.; Sivakumar, K.; Aguilar, A.; Pinkham, C.A.; Chan, K.S.; James, A. Deep neural network media noise predictor turbo-detection system for 1-D and 2-D high-density magnetic recording. IEEE Trans. Magn. 2021, 57, 3101113. [Google Scholar] [CrossRef]
- Shimobaba, T.; Kuwata, N.; Homma, M.; Takahashi, T.; Nagahama, Y.; Sano, M.; Hasegawa, S.; Hirayama, R.; Kakue, T.; Shiraki, A.; et al. Convolutional neural network-based data page classification for holographic memory. Appl. Opt. 2017, 56, 7327–7330. [Google Scholar] [CrossRef] [PubMed]
- Shimobaba, T.; Endo, Y.; Hirayama, R.; Nagahama, Y.; Takahashi, T.; Nishitsuji, T.; Kakue, T.; Shiraki, A.; Takada, N.; Masuda, N.; et al. Autoencoder-based holographic image restoration. Appl. Opt. 2017, 53, F27–F30. [Google Scholar] [CrossRef] [PubMed]
- Katano, Y.; Muroi, T.; Kinoshita, N.; Ishii, N.; Hayashi, N. Data demodulation using convolutional neural networks for holographic data storage. Jpn. J. Appl. Phys. 2018, 57, 09SC01. [Google Scholar] [CrossRef]
- Katano, Y.; Nobukawa, T.; Muroi, T.; Kinoshita, N.; Norihiko, I. CNN-based demodulation for a complex amplitude modulation code in holographic data storage. Opt. Rev. 2021, 28, 662–672. [Google Scholar] [CrossRef]
- Katano, Y.; Muroi, T.; Kinoshita, N.; Ishii, N. Demodulation of multi-level data using convolutional neural network in holographic data storage. In Proceedings of the 2018 Digital Image Computing: Techniques and Applications (DICTA), Canberra, ACT, Australia, 10–13 December 2018; pp. 1–5. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Methods | RMSE |
|---|---|
| Structure 1 | 0.2746 |
| Structure 2 | 0.2903 |
| Structure 3 | 0.2565 |
| Structure 4 | 0.2477 |
| Structure 5 | 0.2353 |
| Structure 6 | 0.2213 |
| Structure 7 | 0.2135 |
| Structure 8 | 0.2047 |
| Conventional equalizer in [18] | 0.3064 |
| Methods | Mul/Div | Add/Sub |
|---|---|---|
| Structure 1 | 1998 | 1955 |
| Structure 2 | 4578 | 4435 |
| Structure 3 | 2623 | 2555 |
| Structure 4 | 4581 | 4438 |
| Structure 5 | 6489 | 6271 |
| Structure 6 | 7114 | 6871 |
| Structure 7 | 7739 | 7471 |
| Structure 8 | 7123 | 6817 |
| Conventional equalizer in [18] | 33 | 48 |
| DFE with reliability factor [2] | >36 | >34 |
| Methods | Latency (ms) |
|---|---|
| Structure 1 | 4.1 |
| Structure 2 | 6.448 |
| Structure 3 | 6.151 |
| Structure 4 | 7.25 |
| Structure 5 | 8.23 |
| Structure 6 | 8.532 |
| Structure 7 | 8.623 |
| Structure 8 | 8.854 |
| Conventional equalizer in [18] | 0.0902 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nguyen, T.A.; Lee, J. A Nonlinear Convolutional Neural Network-Based Equalizer for Holographic Data Storage Systems. Appl. Sci. 2023, 13, 13029. https://doi.org/10.3390/app132413029
Nguyen TA, Lee J. A Nonlinear Convolutional Neural Network-Based Equalizer for Holographic Data Storage Systems. Applied Sciences. 2023; 13(24):13029. https://doi.org/10.3390/app132413029
Chicago/Turabian StyleNguyen, Thien An, and Jaejin Lee. 2023. "A Nonlinear Convolutional Neural Network-Based Equalizer for Holographic Data Storage Systems" Applied Sciences 13, no. 24: 13029. https://doi.org/10.3390/app132413029
APA StyleNguyen, T. A., & Lee, J. (2023). A Nonlinear Convolutional Neural Network-Based Equalizer for Holographic Data Storage Systems. Applied Sciences, 13(24), 13029. https://doi.org/10.3390/app132413029