
Underwater Radiated Noise Prediction Method of Cabin Structures under Hybrid Excitation

Abstract
:1. Introduction
2. Theoretical Basis of Acoustic Information Monitoring for Cabin Structures
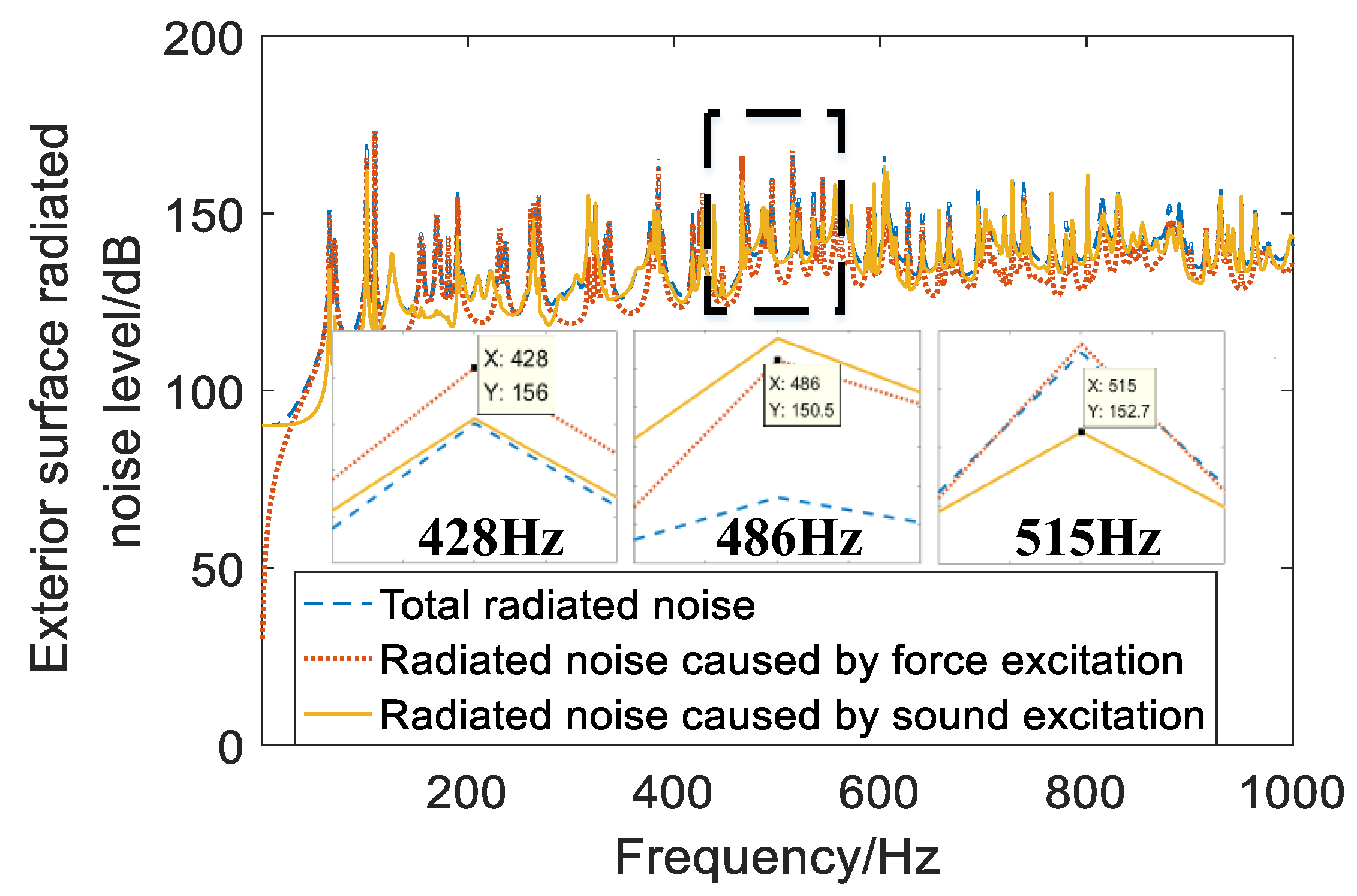
2.1. Analysis of the Vibration and Sound Characteristics of Cabin Structures under Hybrid Excitation
2.2. Analysis of the Influence on Information Completeness of Acoustic and Vibration Monitoring Points
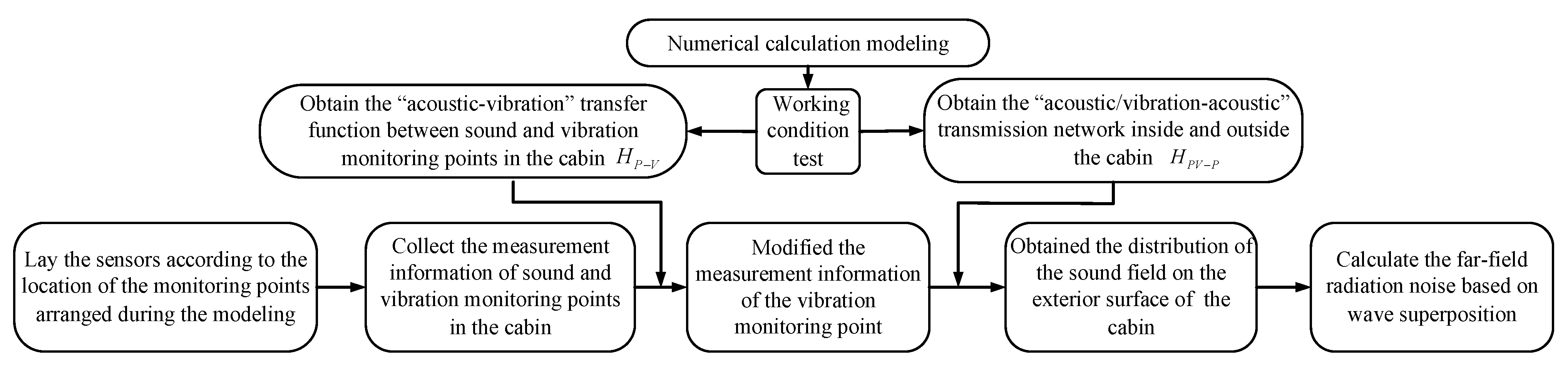
3. Underwater Radiation Noise Prediction Method for Cabin Structures
3.1. “Acoustic/Vibration-Acoustic” Transmission Network inside and outside the Cabin Structure Modeling Method Based on OTPA
3.2. Underwater Radiation Noise Prediction Method Based on the Wave Superposition Method
3.3. Simulation Calculation and Analysis
3.3.1. Modeling Accuracy Analysis of the “Acoustic/Vibration-Acoustic” Transmission Network inside and outside the Cabin Structure
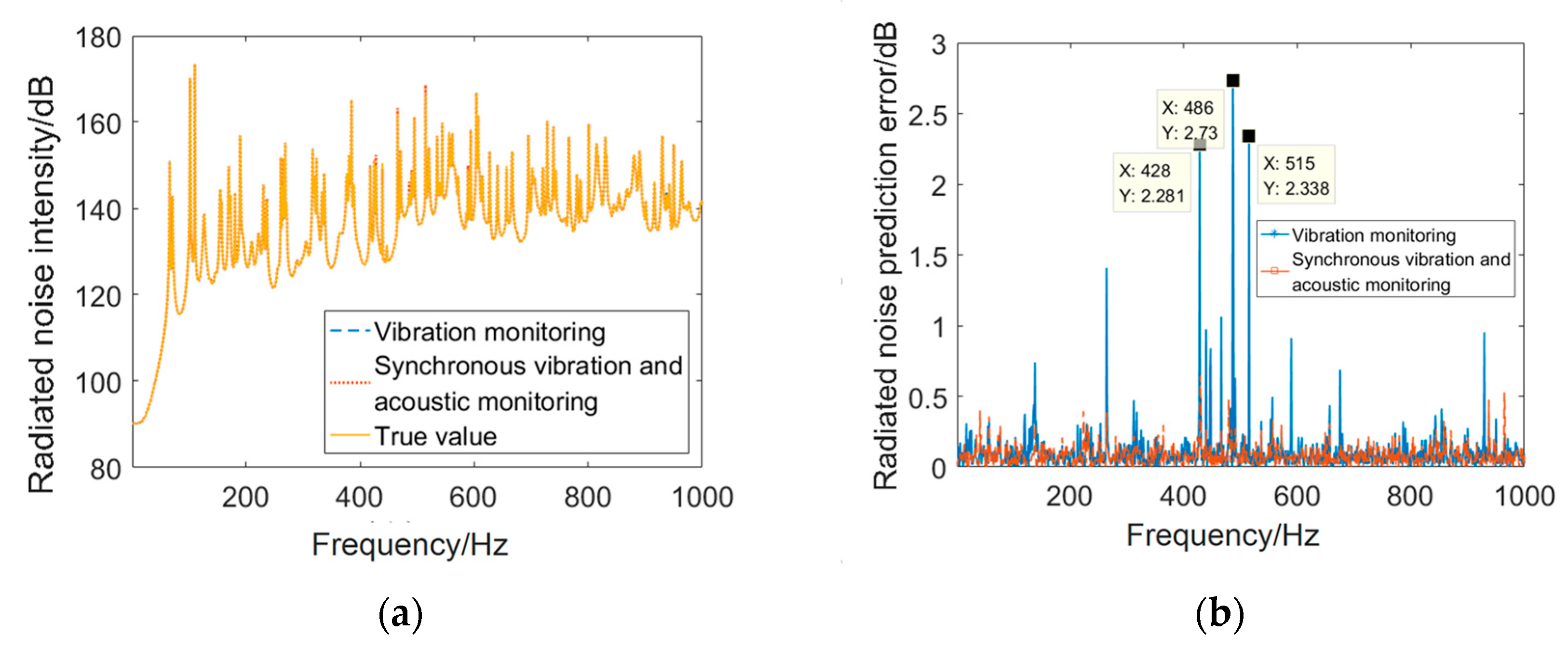
3.3.2. Performance Analysis of Far-Field Radiation Noise Prediction outside the Cabin
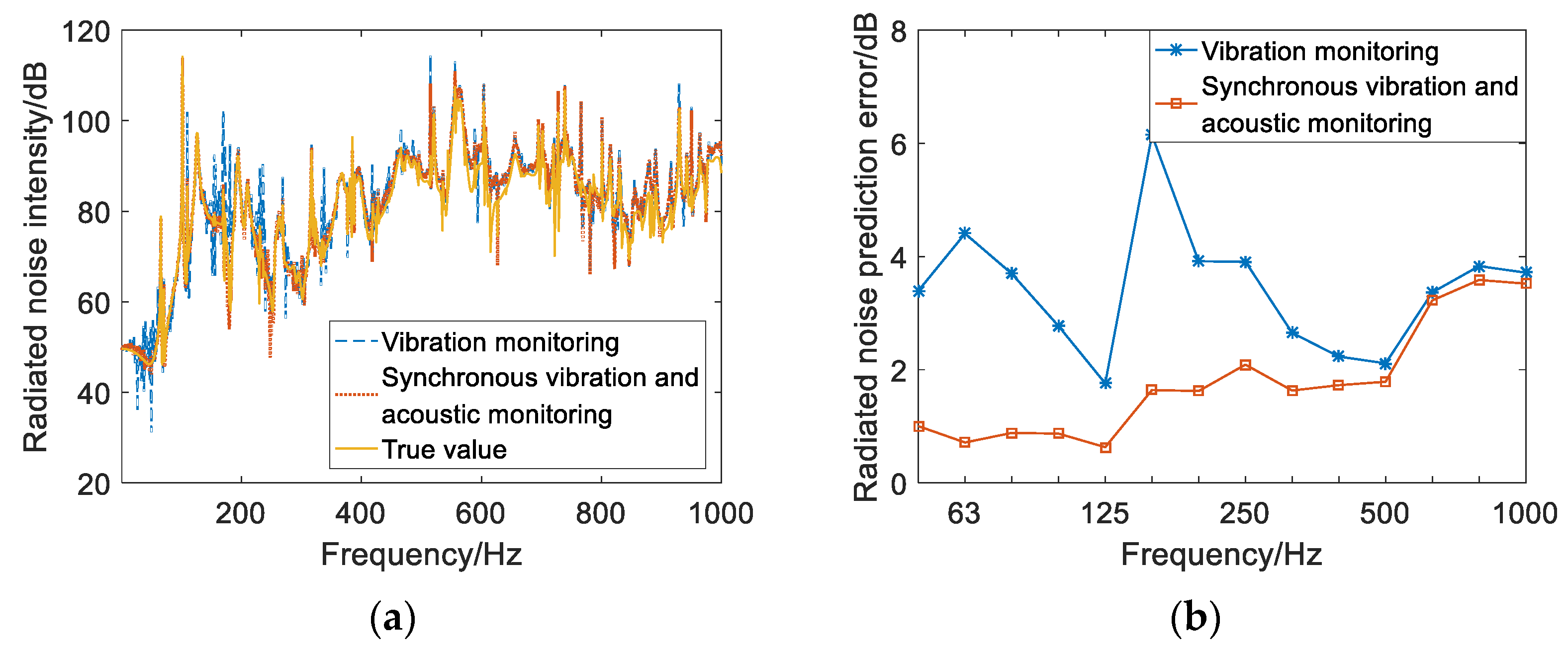
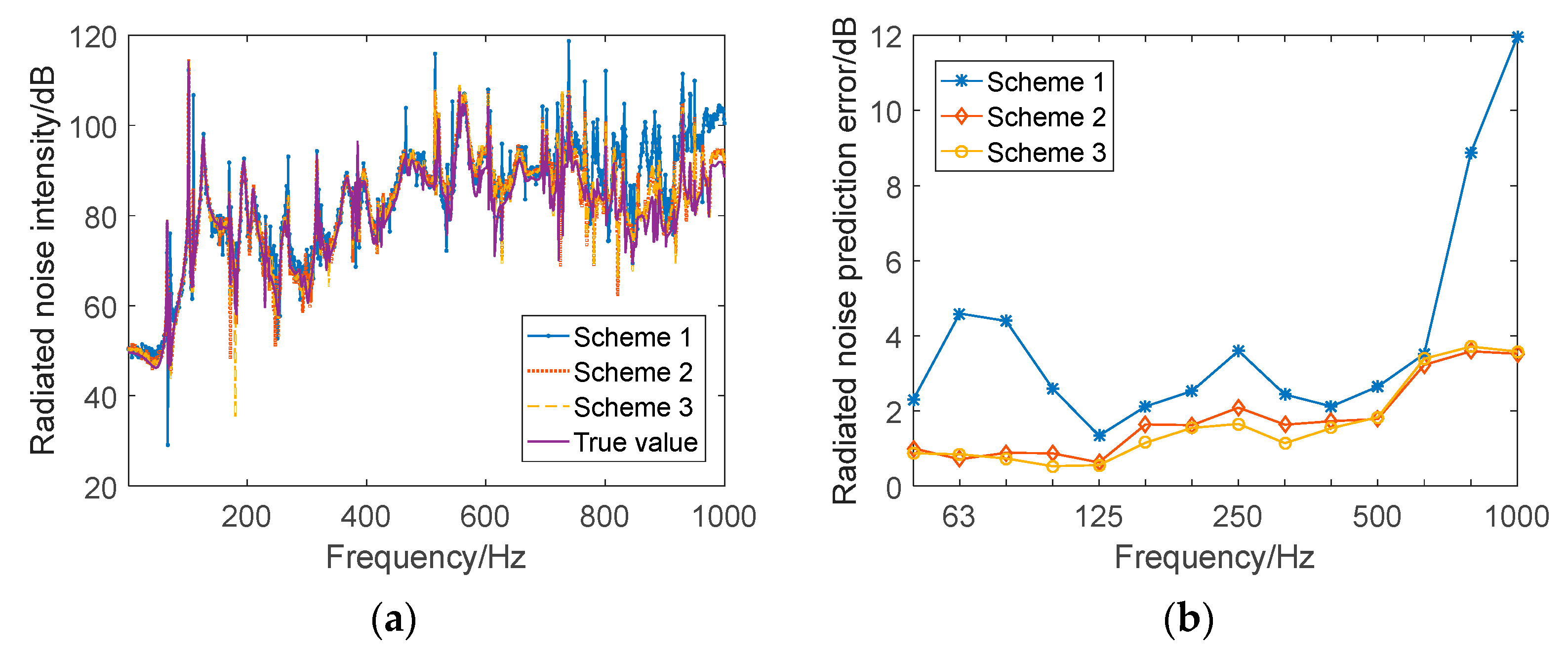
3.3.3. Comparative Analysis of Underwater Radiation Noise Prediction Performance under Different Monitoring Schemes
3.3.4. Analysis of the Influence of External Sound Response Points on Underwater Radiation Noise Prediction Performance
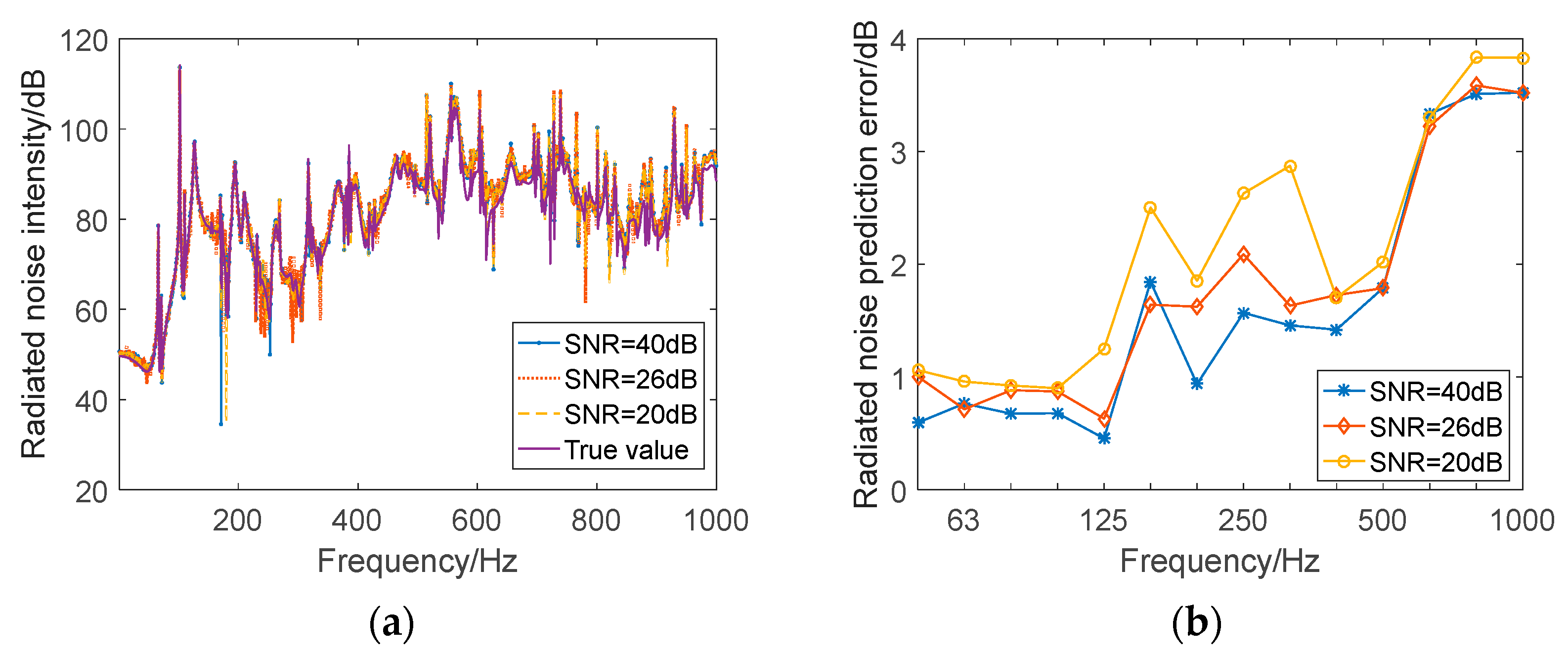
3.3.5. Analysis of the Influence of Underwater Radiation Noise Prediction Performance under Different SNR Conditions
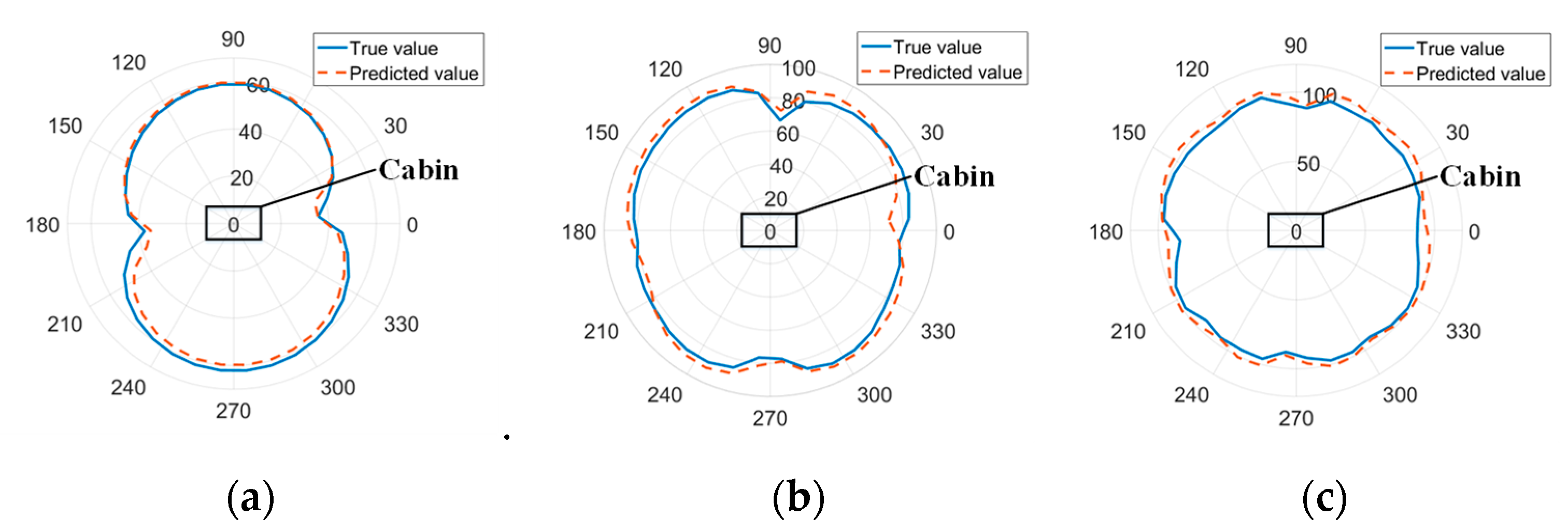
3.3.6. Performance Analysis of Spatial Directional Prediction of Underwater Radiated Noise
4. Experiments
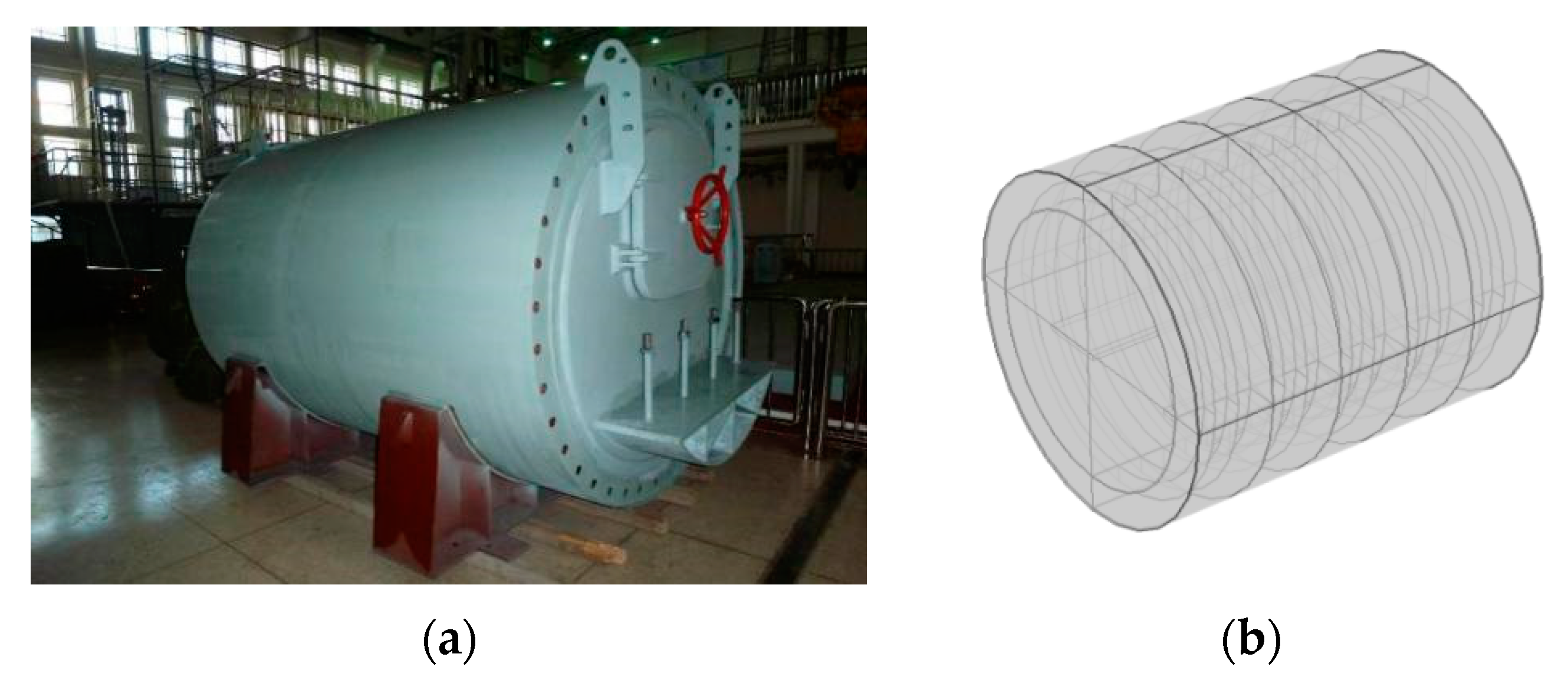
4.1. Experimental Conditions
4.2. Analysis of Experimental Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zhang, B.; Xiang, Y.; He, P.; Zhang, G.-J. Study on prediction methods and characteristics of ship underwater radiated noise within full frequency. Ocean Eng. 2019, 174, 61–70. [Google Scholar] [CrossRef]
- Ye, L.; Shen, J.; Tong, Z.; Liu, Y. Research on acoustic reconstruction methods of the hull vibration based on the limited vibration monitor data. Ocean Eng. 2022, 266, 112886. [Google Scholar] [CrossRef]
- Badino, A.; Borelli, D.; Gaggero, T.; Rizzuto, E.; Schenone, C. Normative framework for ship noise: Present and situation and future trends. Noise Control Eng. J. 2012, 60, 740–762. [Google Scholar] [CrossRef]
- Zheng, X.; Dai, W.; Qiu, Y.; Hao, Z. Prediction and energy contribution analysis of interior noise in a high-speed train based on modified energy finite element analysis. Mech. Syst. Signal Process. 2019, 126, 439–457. [Google Scholar] [CrossRef]
- Yaylacı, M.; Avcar, M. Finite element modeling of contact between an elastic layer and two elastic quarter planes. Comput. Concr. Int. J. 2020, 26, 107–114. [Google Scholar]
- Liu, Q.; Thompson, D.J.; Xu, P.; Feng, Q.; Li, X. Investigation of train-induced vibration and noise from a steel-concrete composite railway bridge using a hybrid finite element-statistical energy analysis method. J. Sound Vib. 2020, 471, 115197. [Google Scholar] [CrossRef]
- Chen, L.L.; Lian, H.; Liu, Z.; Chen, H.B.; Atroshchenko, E.; Bordas, S. Structural shape optimization of three dimensional acoustic problems with isogeometric boundary element methods. Comput. Methods Appl. Mech. Eng. 2019, 355, 926–951. [Google Scholar] [CrossRef]
- Wu, C.; Yin, H. The inclusion-based boundary element method (iBEM) for virtual experiments of elastic composites. Eng. Anal. Bound. Elem. 2021, 124, 245–258. [Google Scholar] [CrossRef]
- Wu, Y.H.; Dong, C.Y.; Yang, H.S. Isogeometric indirect boundary element method for solving the 3D acoustic problems. J. Comput. Appl. Math. 2020, 363, 273–299. [Google Scholar] [CrossRef]
- Vaitkus, D.; Tcherniak, D.; Brunskog, J. Application of vibro-acoustic operational transfer path analysis. Appl. Acoust. 2019, 154, 201–212. [Google Scholar] [CrossRef]
- Li, R.; Bu, W.; Xu, R. Research on Ship-Radiated Noise Evaluation and Experimental Verification Based on OTPA Optimized by Operating Condition Clustering. J. Coast. Res. 2020, 111, 326–330. [Google Scholar] [CrossRef]
- Wang, C.; Jiang, W. A novel transmissibility matrix method for identifying partially coherent noise sources on vehicles. Appl. Acoust. 2020, 165, 107318. [Google Scholar] [CrossRef]
- Nan, Z.; Behrendt, M.; Lu, M.; Petersen, M.; Albers, A. OTPA method-based contribution analysis of components on the vibration of fuel cell in fuel cell vehicles. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Washington, DC, USA, 1–5 August 2021; Institute of Noise Control Engineering: Reston, VI, USA, 2021; Volume 263, pp. 3720–3730. [Google Scholar]
- Rodríguez, P.V.; Magrans, F.X. OTPA method weakness in real case applications. In Proceedings of the INTER-NOISE and NOISE-CON Congress and Conference Proceedings, Washington, DC, USA, 1–5 August 2021; Institute of Noise Control Engineering: Reston, VI, USA, 2016; Volume 253, pp. 3261–3269. [Google Scholar]
- Wang, B.; Tang, W.; Fan, J. An approximate method to acoustic radiation problems: Element Radiation Superposition Method. Chin. J. Acoust. 2008, 27, 350–357. [Google Scholar]
- Chen, M.; Zhang, C.; Tao, X.; Deng, N. Structural and acoustic responses of a submerged stiffened conical shell. Shock. Vib. 2014, 2014, 954253. [Google Scholar] [CrossRef]
- Gao, Y.; Yang, B.Q.; Shi, S.G.; Zhang, H.Y. Extension of sound field reconstruction based on element radiation superposition method in a sparsity framework. Chin. Phys. B 2022, 32, 044302. [Google Scholar] [CrossRef]
- Koopmann, G.H.; Song, L.; Fahnline, J.B. A method for computing acoustic fields based on the principle of wave superposition. J. Acoust. Soc. Am. 1989, 86, 2433–2438. [Google Scholar] [CrossRef]
- Jeans, R.; Mathews, I.C. The wave superposition method as a robust technique for computing acoustic fields. J. Acoust. Soc. Am. 1992, 92, 1156–1166. [Google Scholar] [CrossRef]
- Bi, C.X.; Stuart Bolton, J. An Equivalent Source Technique for Recovering the Free Sound Field in a Noisy Environment. J. Acoust. Soc. Am. 2012, 131, 70–1260. [Google Scholar] [CrossRef] [PubMed]
- Geng, L.; Zhang, X.Z.; Bi, C.X. Reconstruction of transient vibration and sound radiation of an impacted plate using time domain plane wave superposition method. J. Sound Vib. 2015, 344, 114–125. [Google Scholar] [CrossRef]
- Yang, C.; Wang, Y.S.; Guo, H. Hybrid patch near-field acoustic holography based on Kalman filter. Appl. Acoust. 2019, 148, 23–33. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Monitoring Scheme No. | Vibration Monitoring Point | Acoustic Monitoring Point | ||
|---|---|---|---|---|
| Circumferential Number | Axial Number | Circumferential Number | Axial Number | |
| Scheme 1 | 9 | 5 | 5 | 3 |
| Scheme 2 | 15 | 6 | 9 | 5 |
| Scheme 3 | 20 | 8 | 15 | 6 |
| Frequency (Hz) | Radiation Noise Prediction Error (dB) | |||||||
|---|---|---|---|---|---|---|---|---|
| Investigation Point 1 | Investigation Point 2 | Investigation Point 3 | Investigation Point 4 | |||||
| Vibration Monitoring | Synchronous Monitoring | Vibration Monitoring | Synchronous Monitoring | Vibration Monitoring | Synchronous Monitoring | Vibration Monitoring | Synchronous Monitoring | |
| 100 | 8.54 | 4.87 | 6.28 | 3.43 | 7.24 | 3.74 | 8.59 | 3.5 |
| 125 | 6.49 | 3.49 | 7.92 | 2.68 | 4.65 | 4.87 | 5.06 | 3.66 |
| 160 | 4.67 | 0.57 | 9.46 | 2.97 | 4.1 | 4.29 | 4.1 | 0.04 |
| 200 | 3.19 | 0.52 | 5.86 | 2.76 | 3.53 | 4.11 | 0.85 | 0.52 |
| 250 | 3.42 | 2.53 | 6.38 | 3.01 | 3.2 | 0.44 | 7.38 | 1.76 |
| 315 | 3.98 | 1.91 | 5.3 | 2.26 | 6.18 | 0.44 | 7.28 | 0.08 |
| 400 | 3.06 | 2.44 | 8.13 | 4.99 | 7.14 | 0.33 | 3.34 | 2.68 |
| 500 | 2.19 | 1.88 | 3.14 | 0.46 | 4 | 2.01 | 5.57 | 2.54 |
| 630 | 4.99 | 1.88 | 2.6 | 1.18 | 5.43 | 1.76 | 2.95 | 0.28 |
| 800 | 5.66 | 2.33 | 6.26 | 2.78 | 2.04 | 0.73 | 3.73 | 3.1 |
| 1000 | 3.75 | 1.76 | 5.23 | 2.81 | 3.42 | 3.62 | 4.37 | 1.16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, Q.; Zhang, H.; Yang, B.; Shi, S. Underwater Radiated Noise Prediction Method of Cabin Structures under Hybrid Excitation. Appl. Sci. 2023, 13, 12667. https://doi.org/10.3390/app132312667
Guo Q, Zhang H, Yang B, Shi S. Underwater Radiated Noise Prediction Method of Cabin Structures under Hybrid Excitation. Applied Sciences. 2023; 13(23):12667. https://doi.org/10.3390/app132312667
Chicago/Turabian StyleGuo, Qiang, Haoyang Zhang, Boquan Yang, and Shengguo Shi. 2023. "Underwater Radiated Noise Prediction Method of Cabin Structures under Hybrid Excitation" Applied Sciences 13, no. 23: 12667. https://doi.org/10.3390/app132312667
APA StyleGuo, Q., Zhang, H., Yang, B., & Shi, S. (2023). Underwater Radiated Noise Prediction Method of Cabin Structures under Hybrid Excitation. Applied Sciences, 13(23), 12667. https://doi.org/10.3390/app132312667