1. Introduction
Recently, renewable energy has been considered a key solution to the problems of air pollution, global warming, and oil price instability. Transportation, as the main consumer of fuel, is facing a new paradigm in electricity generation. Electric vehicles (EVs) are equipped with a rechargeable secondary battery and use electricity as a power source. They do not emit exhaust gas while being driven and produce less noise and vibration than an internal combustion engine (ICE). Compared with an ICE, the EV has excellent efficiency in urban areas, where processes, such as idle acceleration, change rapidly owing to the narrow high-efficiency section in the power operating range. EVs in urban traffic, urban-only EVs, benefit greatly from regenerative braking.
The disadvantages of EVs include their high price and the short distance travelled on a single charge. For long-distance travel, the efficiency of EVs decreases as the benefit of braking is less and the need for more battery energy storage increases [
1]. To deal with these problems, most countries have established an EV subsidy system. Since 2014, this policy system has reduced the cost of EVs through different subsidy calculations based on battery efficiency, and this has encouraged the development of more competitive EVs.
In particular, EV efficiency is expected to be prioritized to reduce carbon emissions through life cycle assessments. Cheong [
2] conducted a comparison of performance, cost, and emissions of EVs and ICEs in long-distance driving. As a result of the study, it was confirmed that the greenhouse gas emissions of vehicle manufacturing are similar for EVs and ICEs, but ICE emissions are about 4.5 times higher than EVs when driving. In addition, when considering maintenance and energy costs, EVs become cheaper than ICEs when used for 10.5 years or more. However, it is expected that the cost reduction of EVs will rise significantly along with the technological development of batteries and electrification.
Therefore, it is necessary to develop and apply various technologies to increase the efficiency of EVs [
3,
4]. Compared to EVs, ICEs have a narrow engine operating range, complex transmissions and couplings with various gear ratios. Therefore, for this reason, power loss occurs due to the gear ratio in the energy transfer step. In contrast, since the motors in EVs have wide operating range and high initial torque, it is possible to drive them with only a simple reducer (transmission). Due to the high initial torque, transients can be overcome quickly. Currently, most EVs have a fixed single ratio because they operate more widely than ICEs and can utilize the maximum torque at lower rotational speeds. Research on the applications of EV transmission is being actively conducted for various purposes. The transmission in a vehicle gradually expands the driving range of the driving source and moves the operating point of the driving source to the high-efficiency section, especially at low speeds, to increase the torque and maximum speed. In the past, the transmission was an essential component of vehicles with an ICE. However, in the case of EVs, the operation range is wider than that of an ICE, and the efficiency is generally high in the entire range; hence, only a single reducer is applied. However, owing to the recent expansion of the EV market, manufacturers, such as Porsche (Taikan) and Bosch (CVT4EV), have increased their research on EV transmission to remain competitive.
Automotive transmissions are divided into manual and automatic transmissions. These include clutch-type manual transmission (MT), torque converter automatic transmission, automatic manual transmission, dual-clutch transmission, and continuously variable transmission. Unlike other transmissions, the CVT does not require multiple gears to implement each shift stage; hence, it has a small volume and does not lose power with changes in the gear ratio. These factors ensure smooth acceleration, which is an advantage of EVs.
CVTs are divided into push-type CVTs that use belts, pull-type CVTs that use chains, and friction-type, tidal type, and E-CVTs that use planetary gears. According to the operating principle of the belt-type CVT, the belt connects the driving pulley and passive pulley, and each pulley is a basic component. Cone-shaped disks are arranged facing each other to change the rotation diameter of the belt between the pulley through tension–compression to realize the shift ratio. Although the belt-type CVT has the advantage of reduced noise, power loss occurs owing to slip between the pulley and the belt. On the other hand, the chain-type CVT has increased power transmission efficiency because slip is reduced by replacing the belt with a chain, and it also responds to a relatively high torque. Its disadvantage is the noise generated by the friction between the pulley and the chain.
In the study by Park [
5], a model of a synchronizer-type two-speed transmission was designed using MATLAB/Simulink. The acceleration performance, maximum speed, and efficiency were determined to obtain shift pattern and improve electronic fuel economy by up to 4%, compared with a Nissan Leaf.
Ren et al. [
6] studied the electronic fuel economy of each driving mode by applying a CVT’s 1st, 2nd, 3rd, and 4th transmissions to 40 kW motorized EV analysis models. For the 4th transmission model, 4.5% FTP-75 to 8.0% CVT and 5.3% FTP-75 to 10.9% improvements in the New European Driving Cycle were obtained.
Kwon et al. [
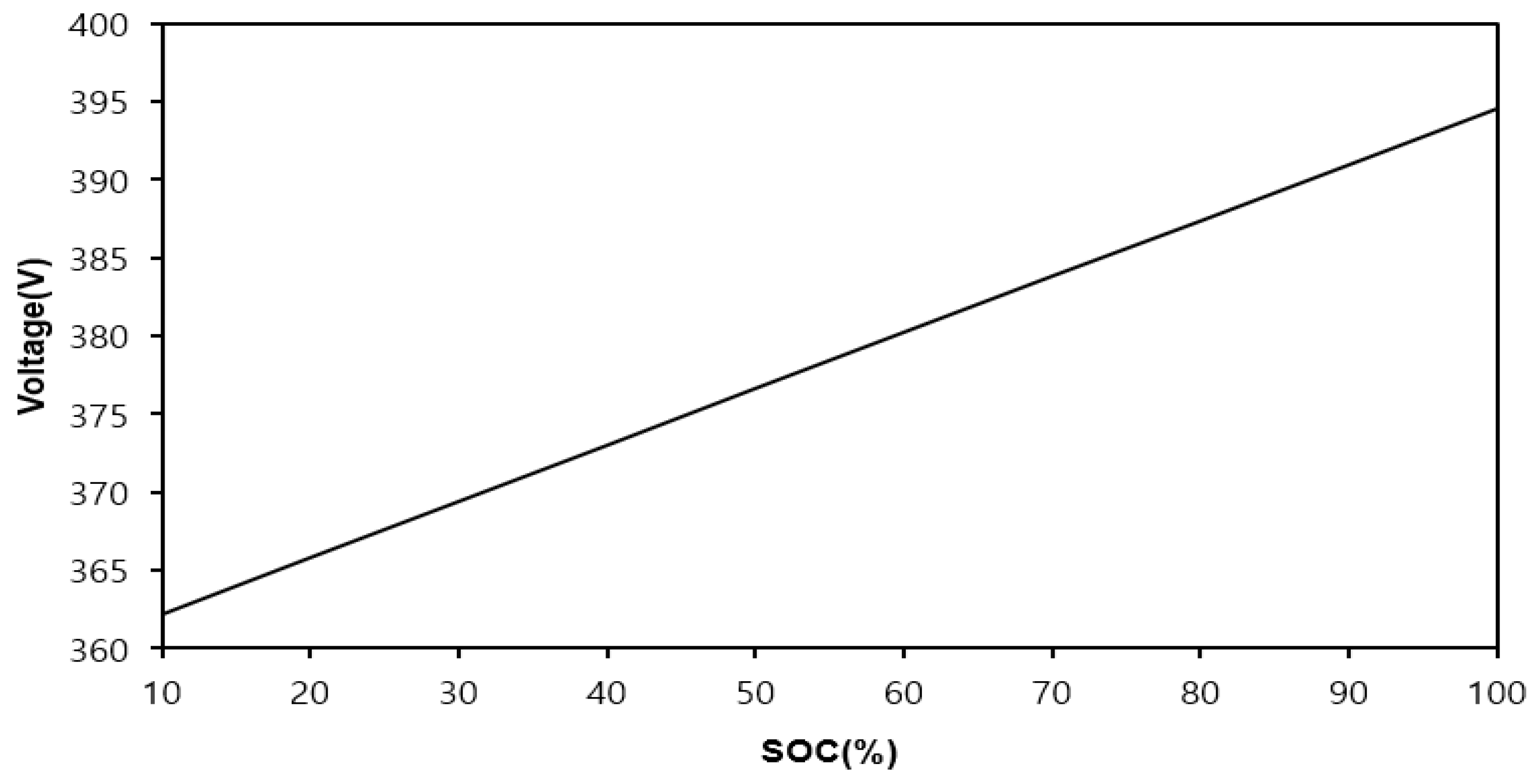
7] developed shift control, state of charge (SOC), drive resistance calculation, and vehicle dynamics models using MATLAB/Simulink to select shift pattern at the point with lowest SOC consumption after driving in test mode.
Kim et al. [
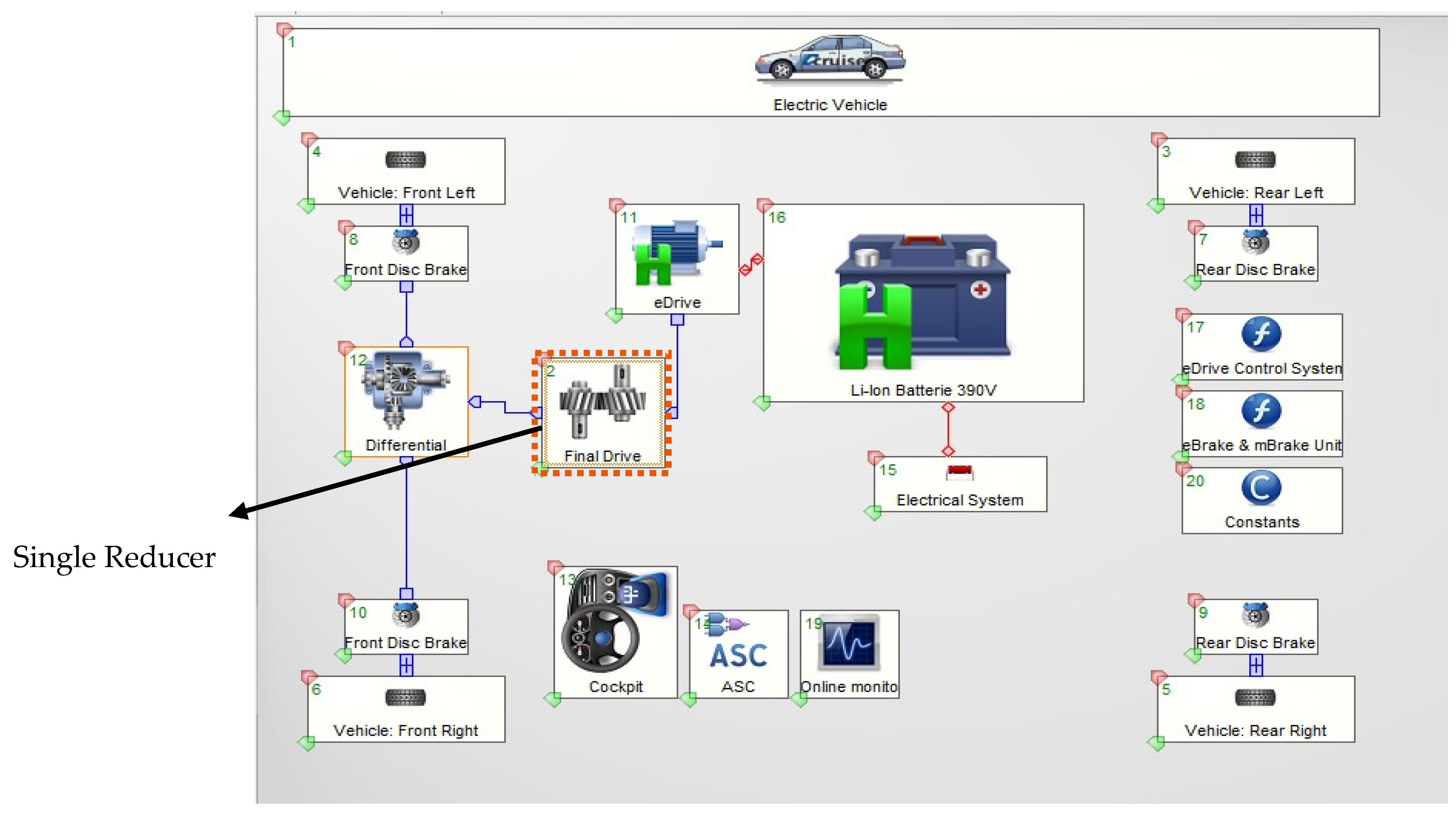
8] developed an EV analysis model using AVL CRUISE software and a two-speed transmission. The comparison of efficiency between a single-reducer electric model with an 80 kW motor and a second-speed transmission EV with a 60 kW motor confirmed the possibility of reducing motor capacity through transmission.
Shin and Bang [
9] developed a regenerative braking system for an EV that combined a conical cone with a roller and flywheel. A prototype was manufactured, which confirmed increase in energy storage and regenerative braking efficiency.
Hofman et al. [
10] developed an analysis model for Volkswagen’s Lupo 3 L and compared the application of an MT and CVT. They confirmed that the CVT provided energy savings of 7% compared with the MT when the final driving ratio was reduced.
Ahsan et al. [
11] applied a multistage transmission to an EV. They confirmed an up to 90% improvement in maximum speed, 19.4% acceleration performance, and 11.3% energy savings when a four-speed transmission system was applied to an electric bus.
Francesca et al. [
12] developed vehicle performance and energy efficiency calculation functions using MATLAB/Simulink. They confirmed that the multistage transmission application model could reduce energy consumption by 29% compared with the single transmission application model.
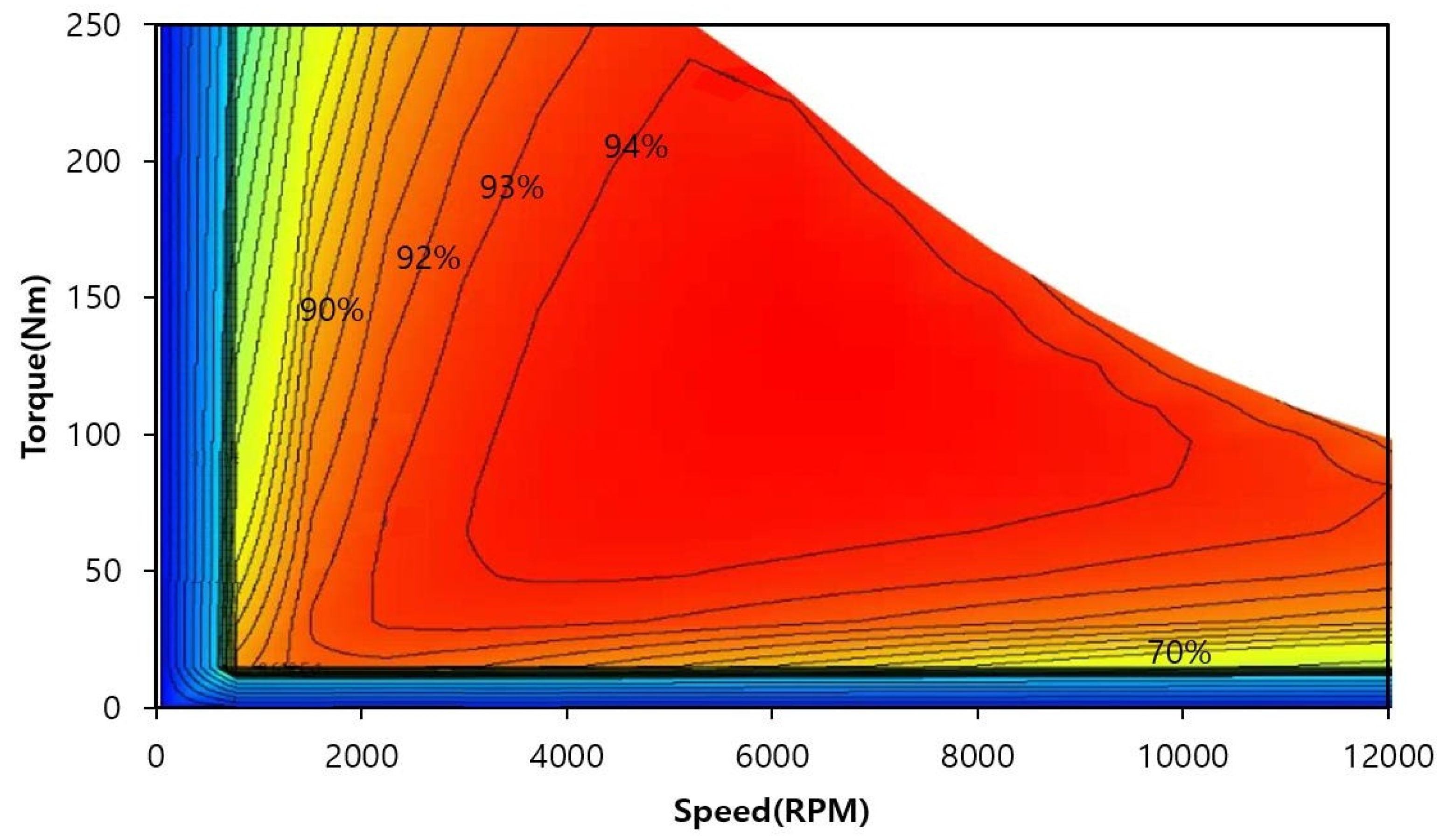
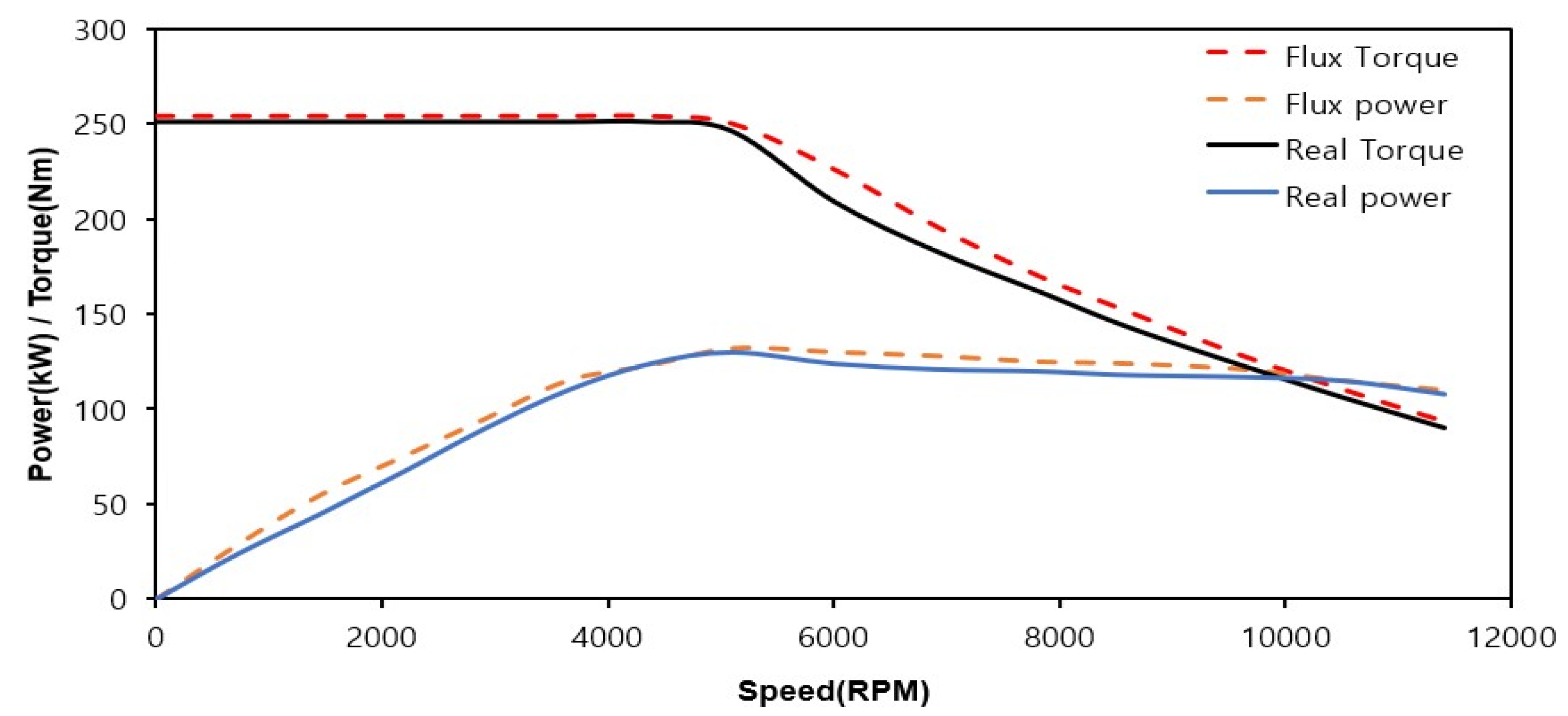
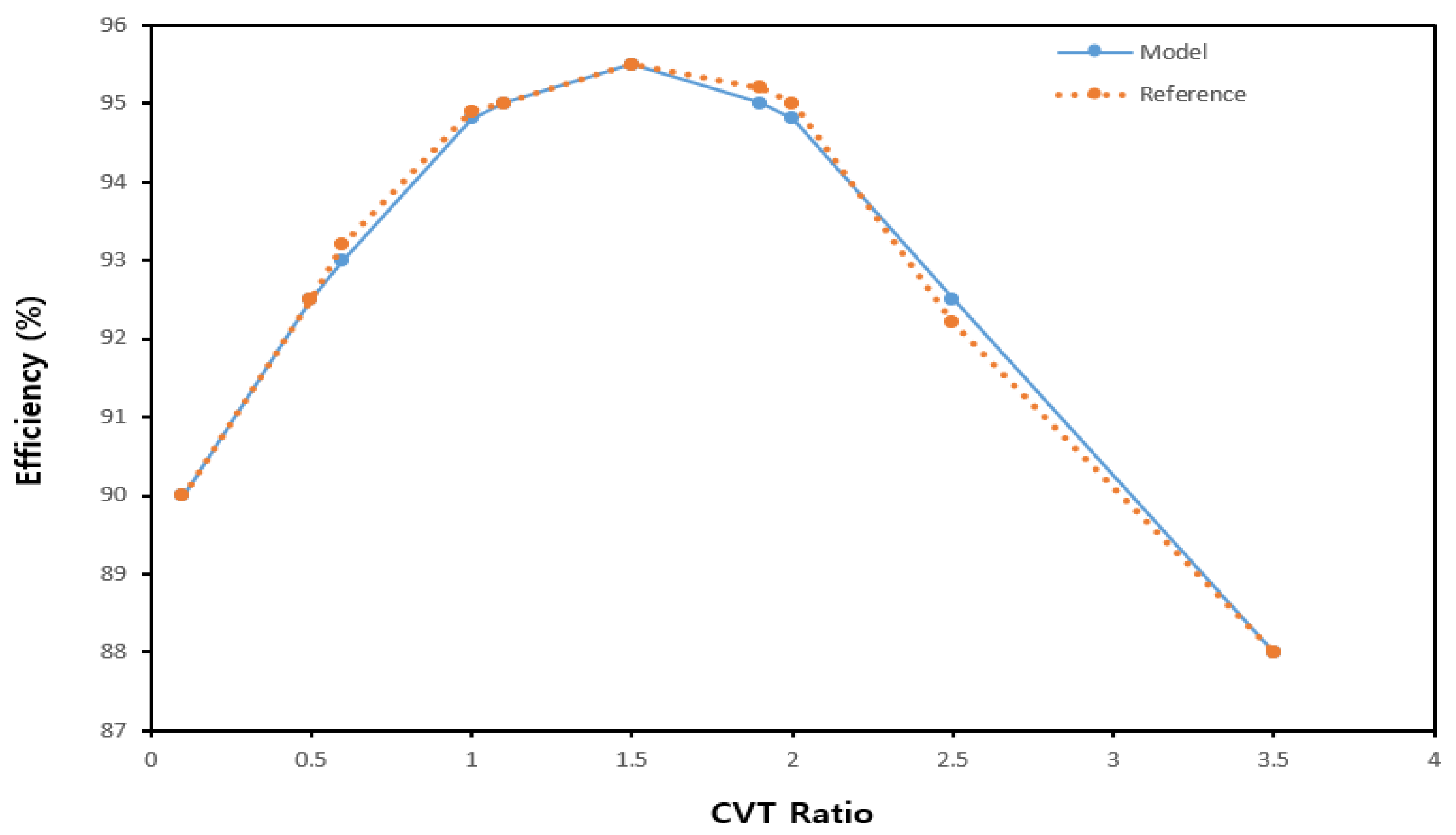
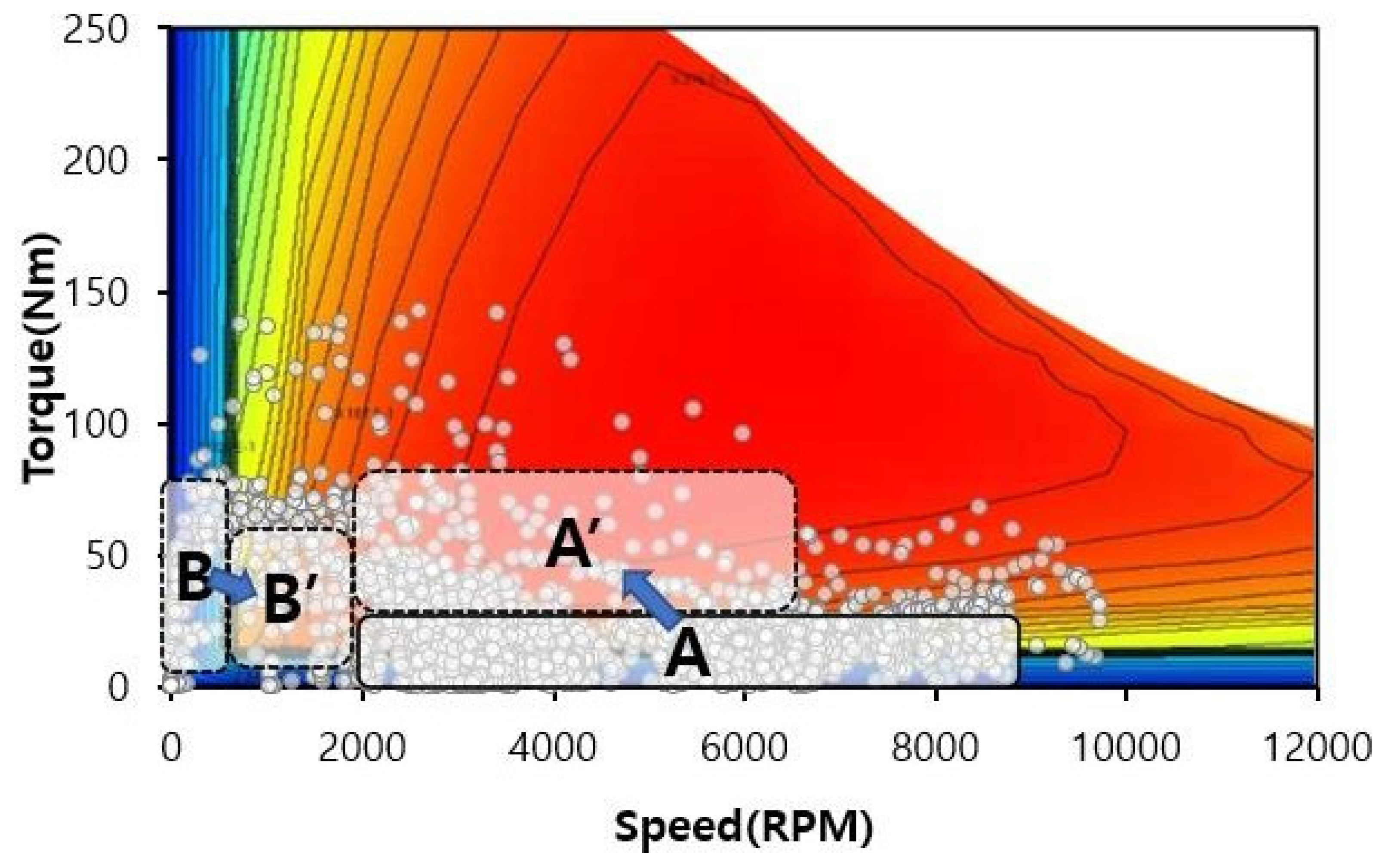
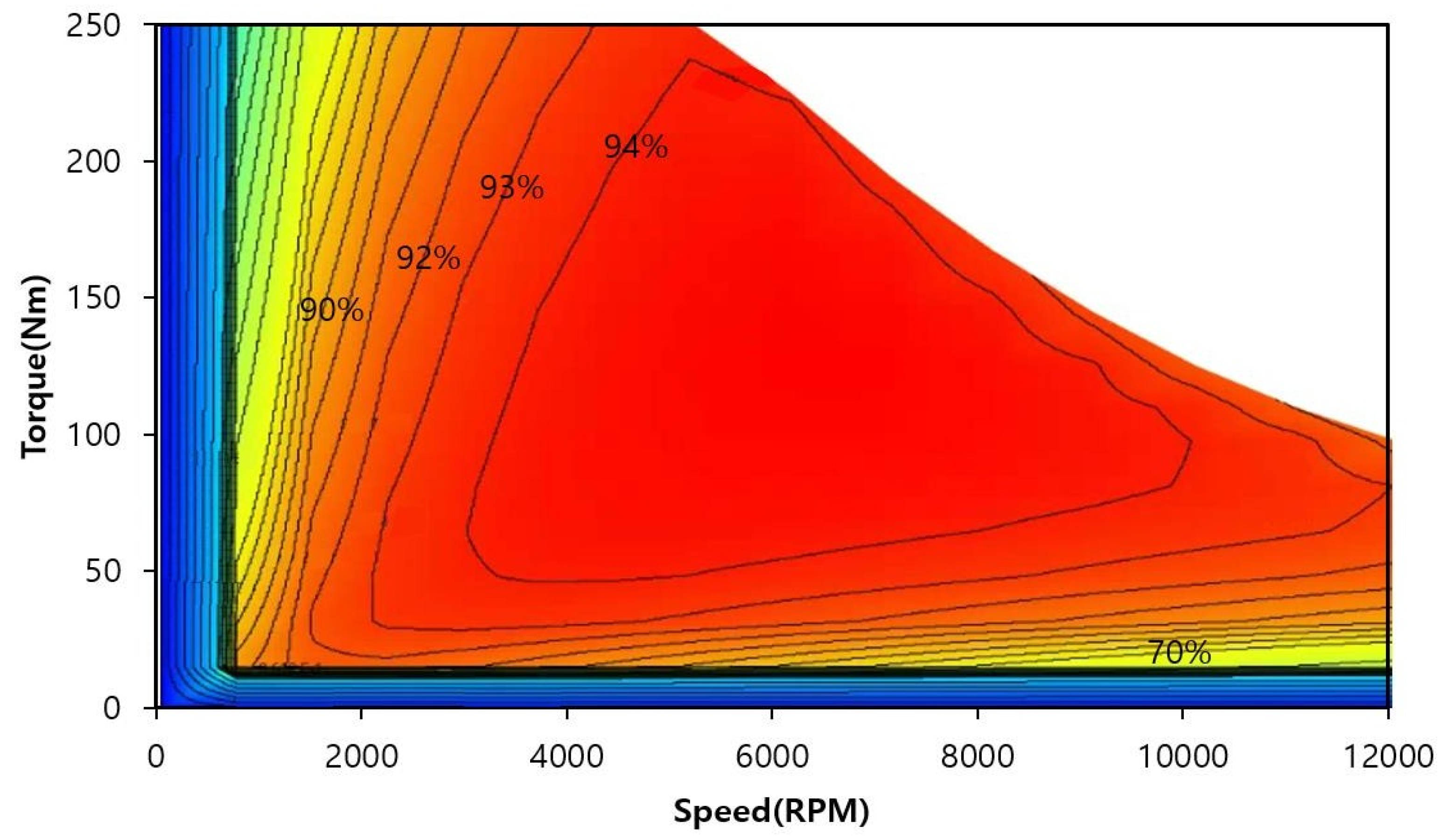
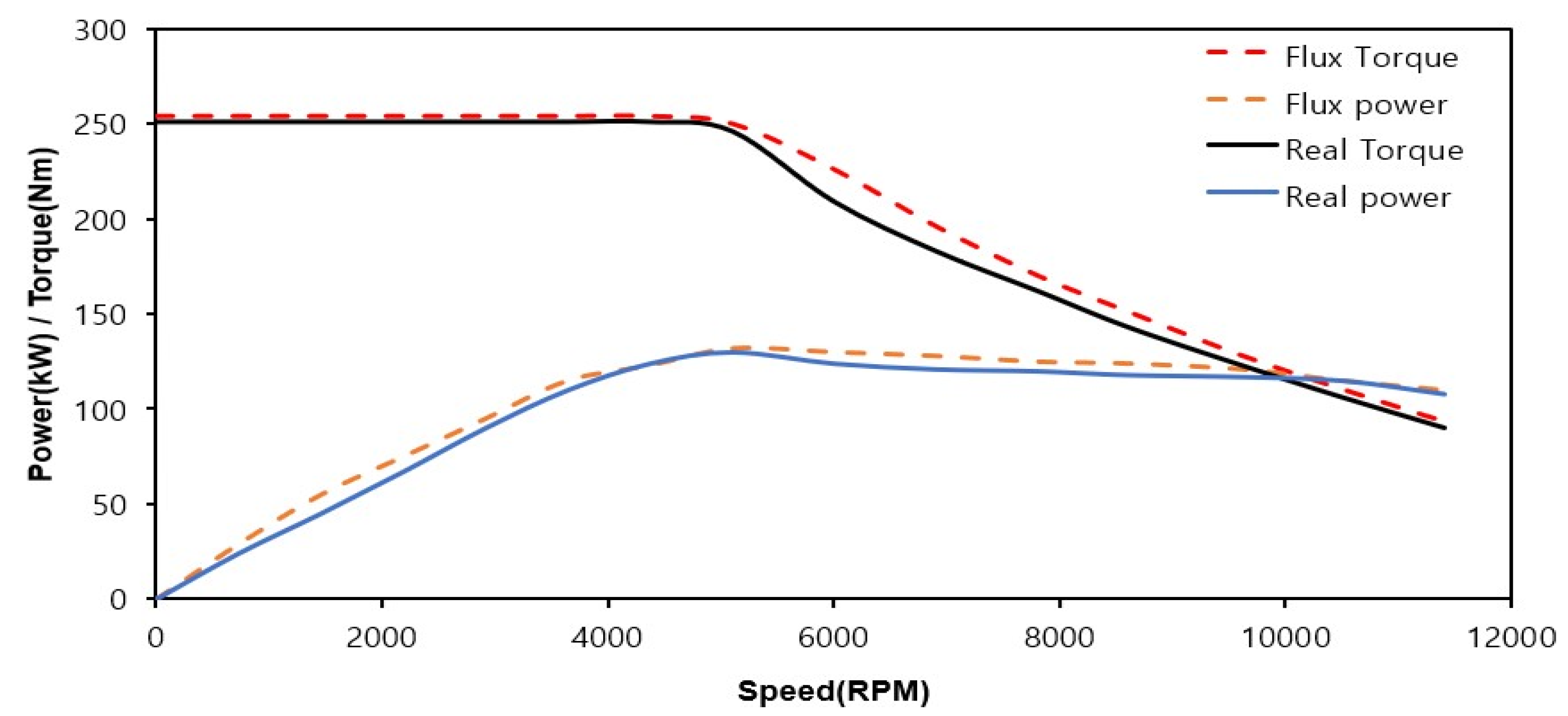
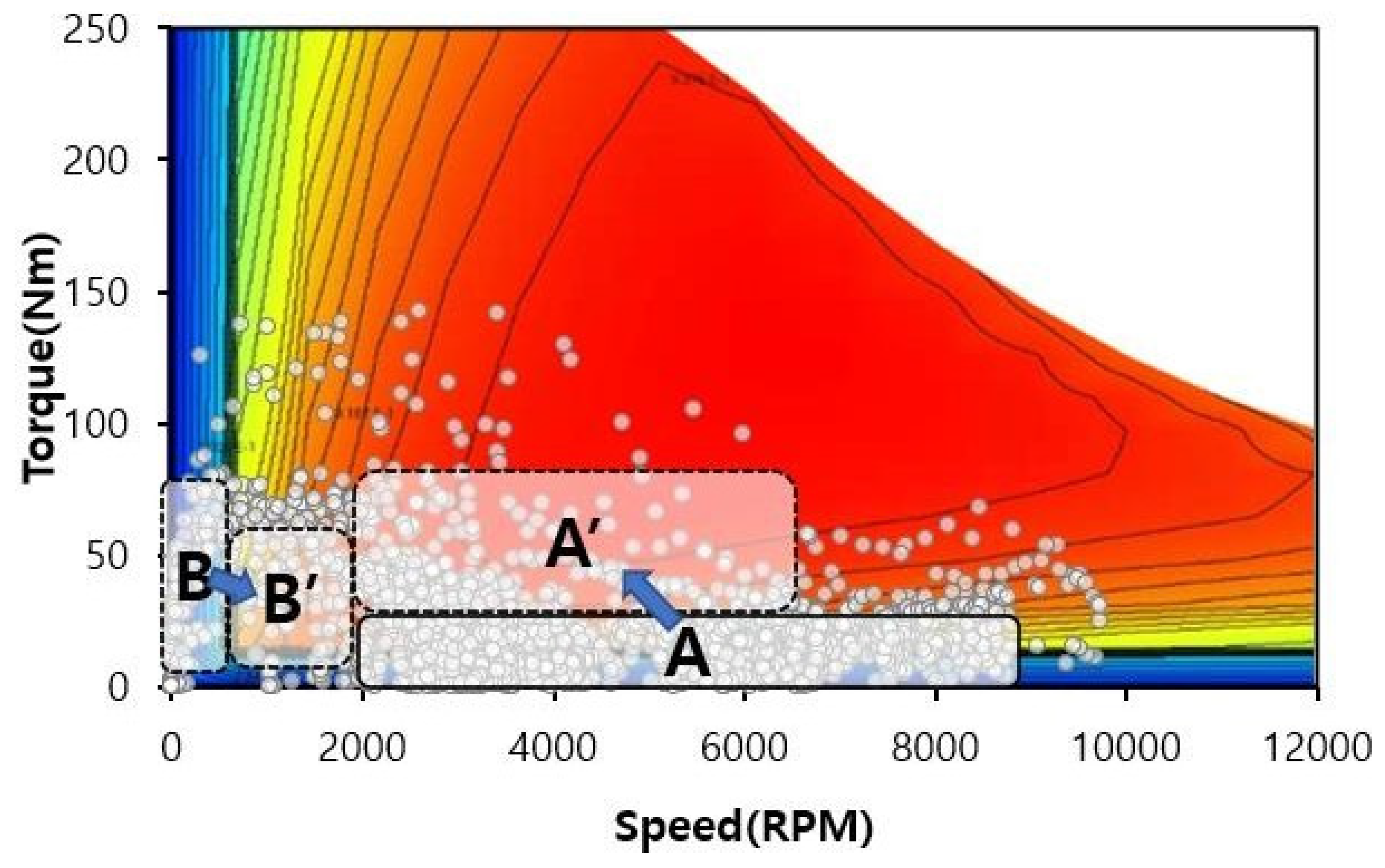
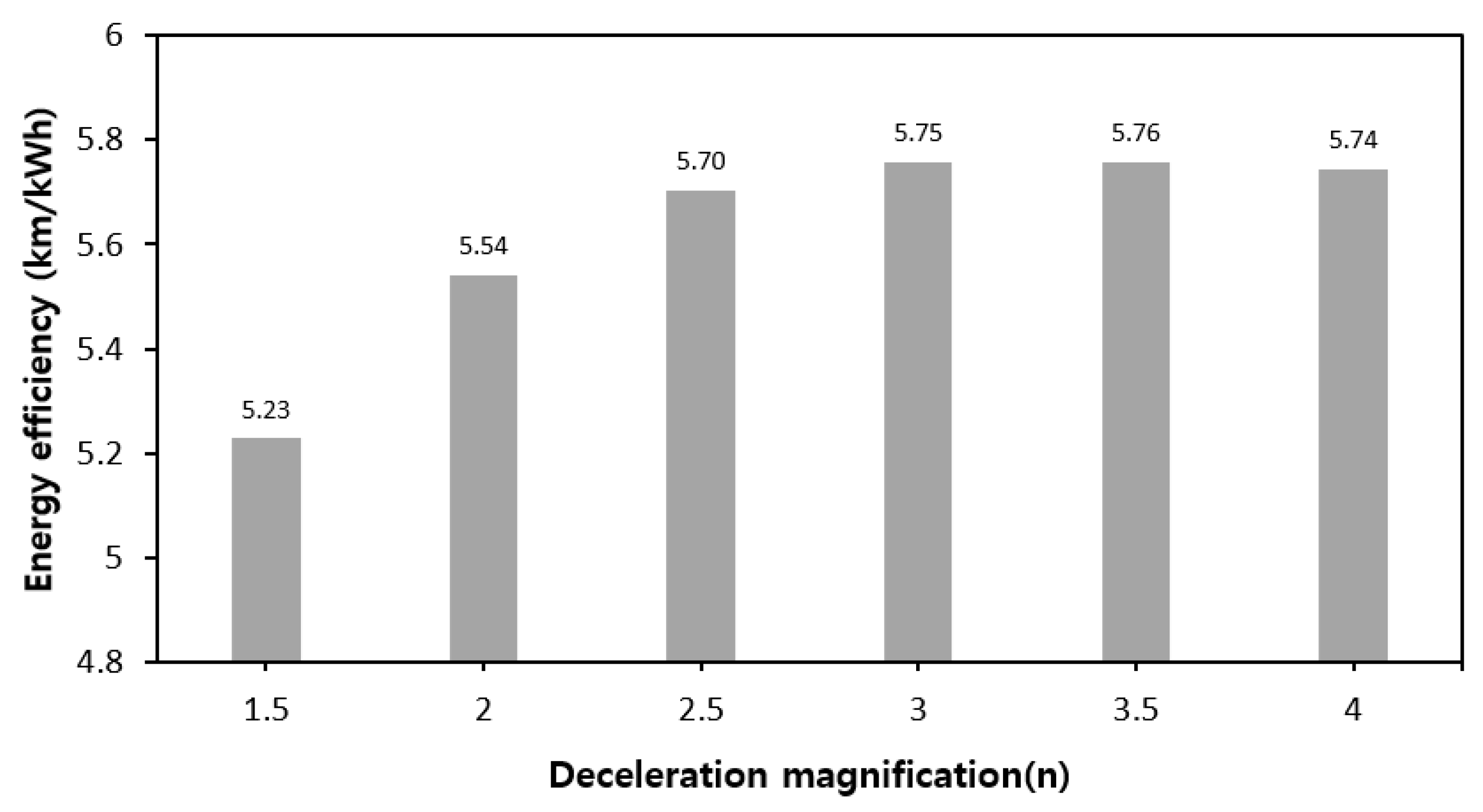
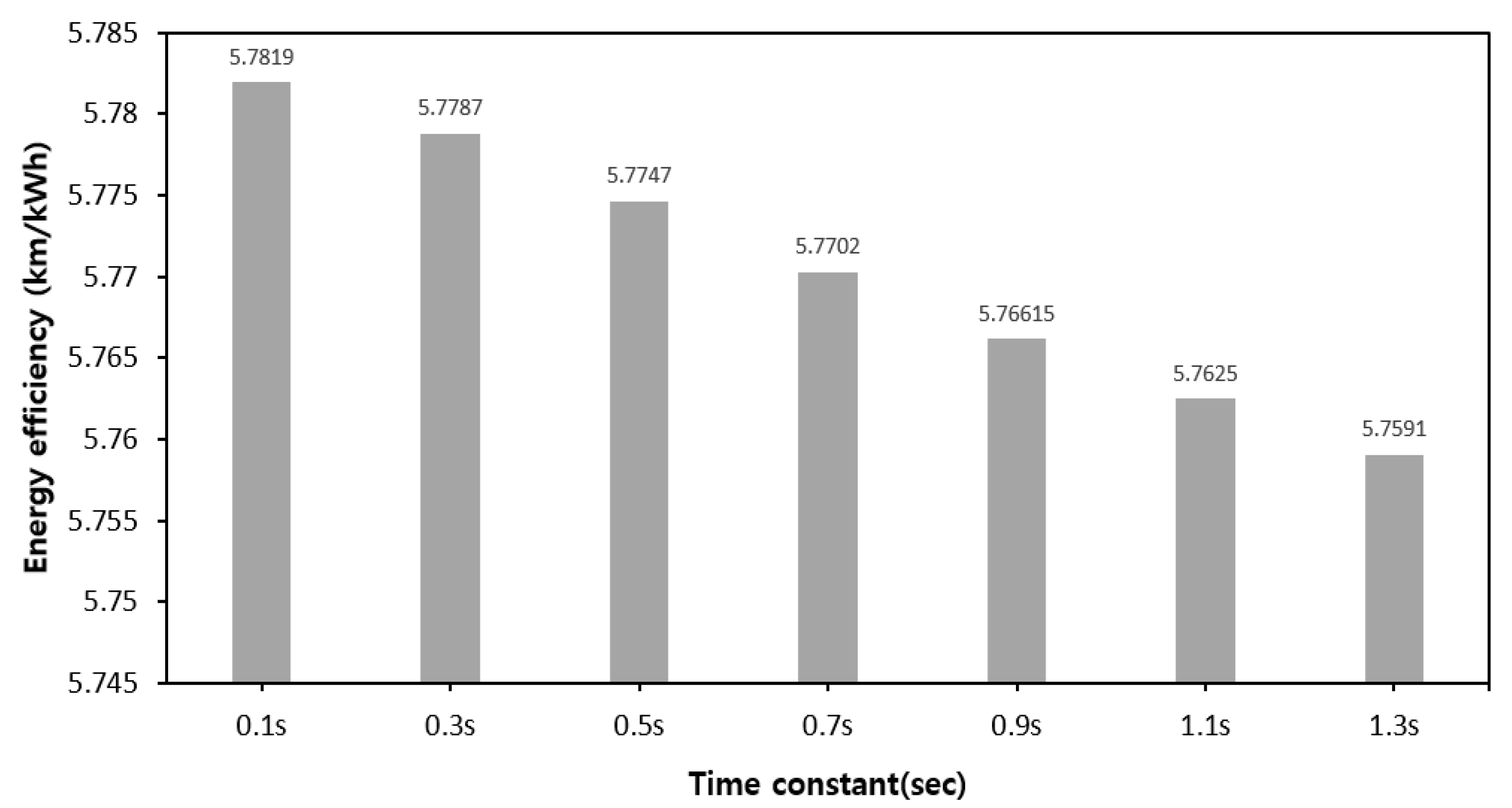
Considering the above previous studies, it is important to improve the efficiency of an electric motor by moving the operating point to reflect the actual motor efficiency map in an analysis model. That is, the operating point of the motor changes according to the change in vehicle speed. If the operating point of the motor changes, it is highly likely that the efficiency of the motor does not operate at the optimal point. Therefore, if the CVT is used, we can set it to operate in the section where the operating efficiency of the motor is maximized. Of course, all transmissions generate a delay according to operation, and how quickly they respond to it is a factor that has a major impact on fuel economy. When the motor passes through a certain torque range and proceeds at high RPM, a certain output range proceeds, which shows a tendency for efficiency to decrease as the motor goes to high RPM due to the characteristics of the motor. Therefore, in order to maximize the efficiency of the motor, to prevent the RPM from rising above a certain output range, and to compensate for this, the maximum operating RPM of the motor is limited to a specific RPM using the transmission ratio of the CVT.
However, previous studies have been insufficient in this regard, which has resulted in large differences between the analysis model data and the actual vehicle data and CVT shift range. In other words, the approximate electronic fuel efficiency increase or decrease can be identified but the reliability is limited.
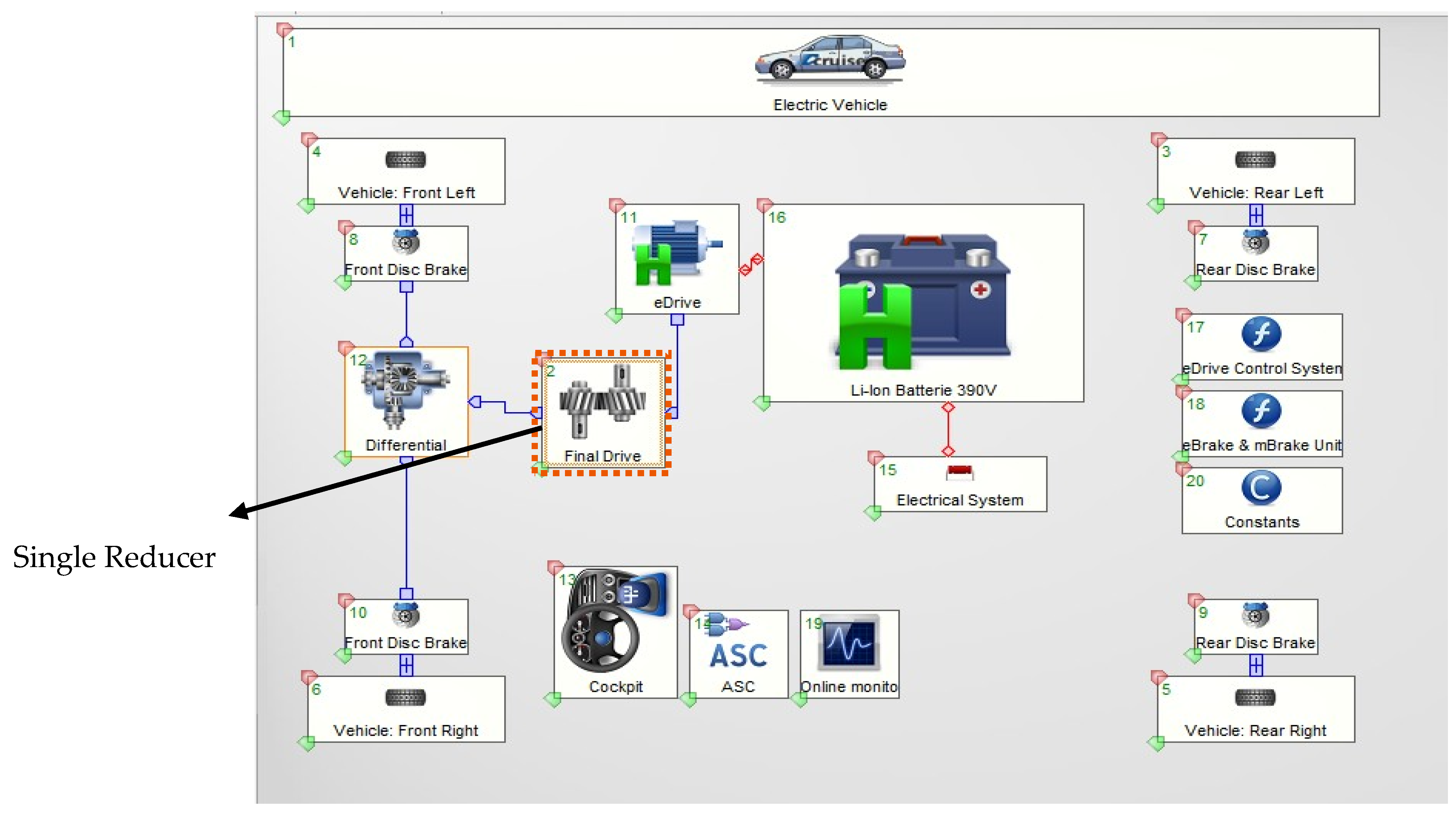
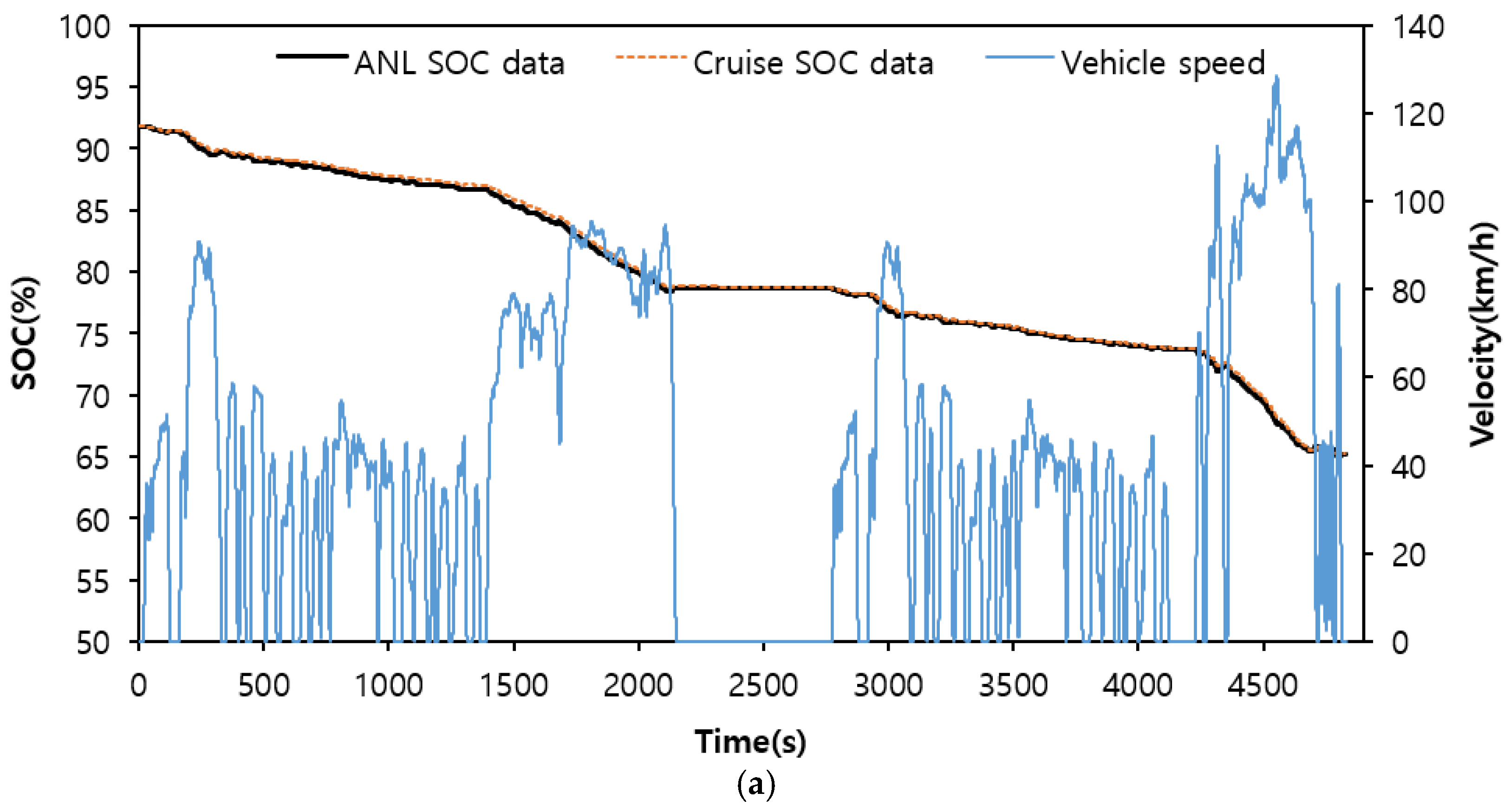
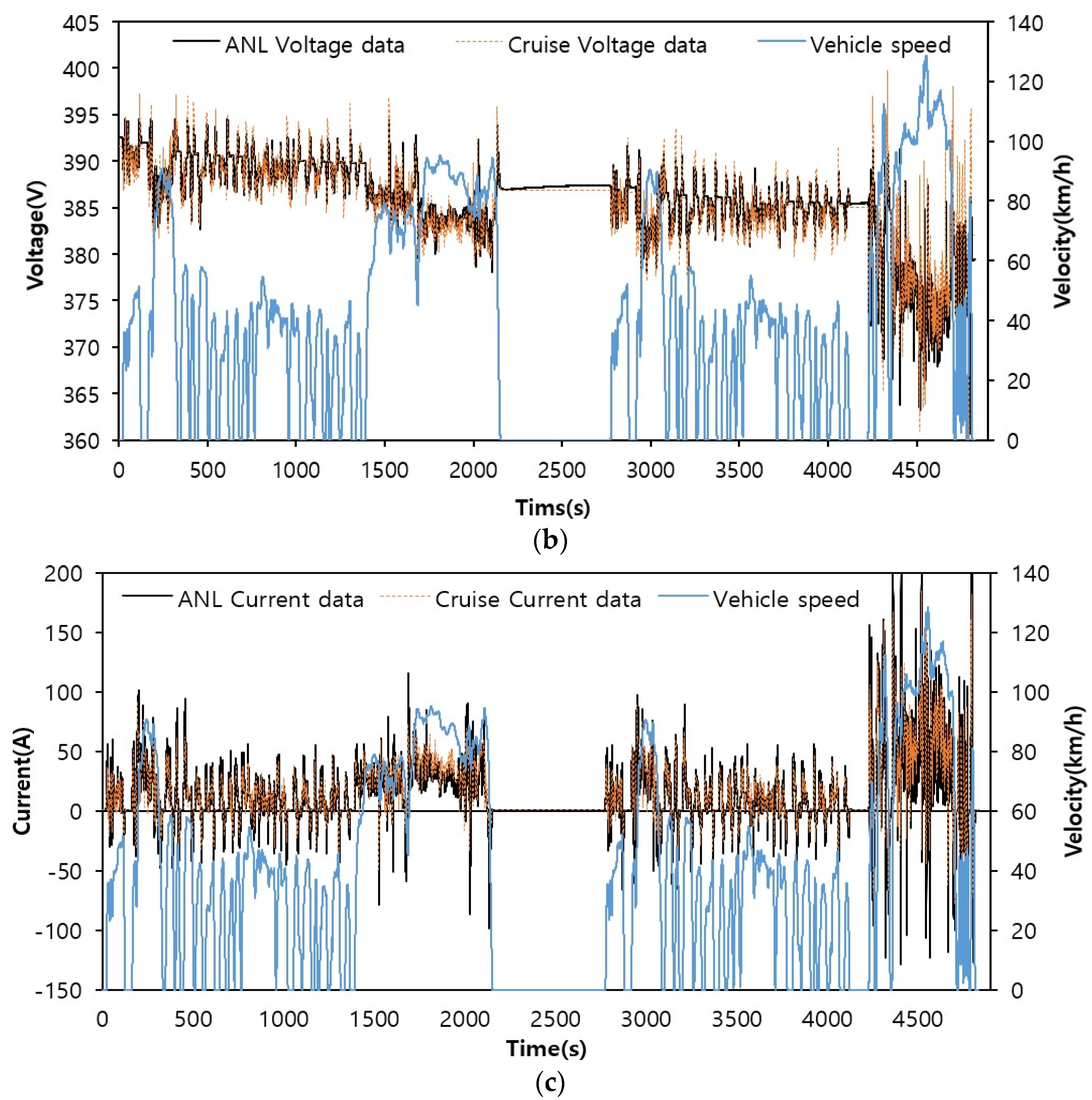
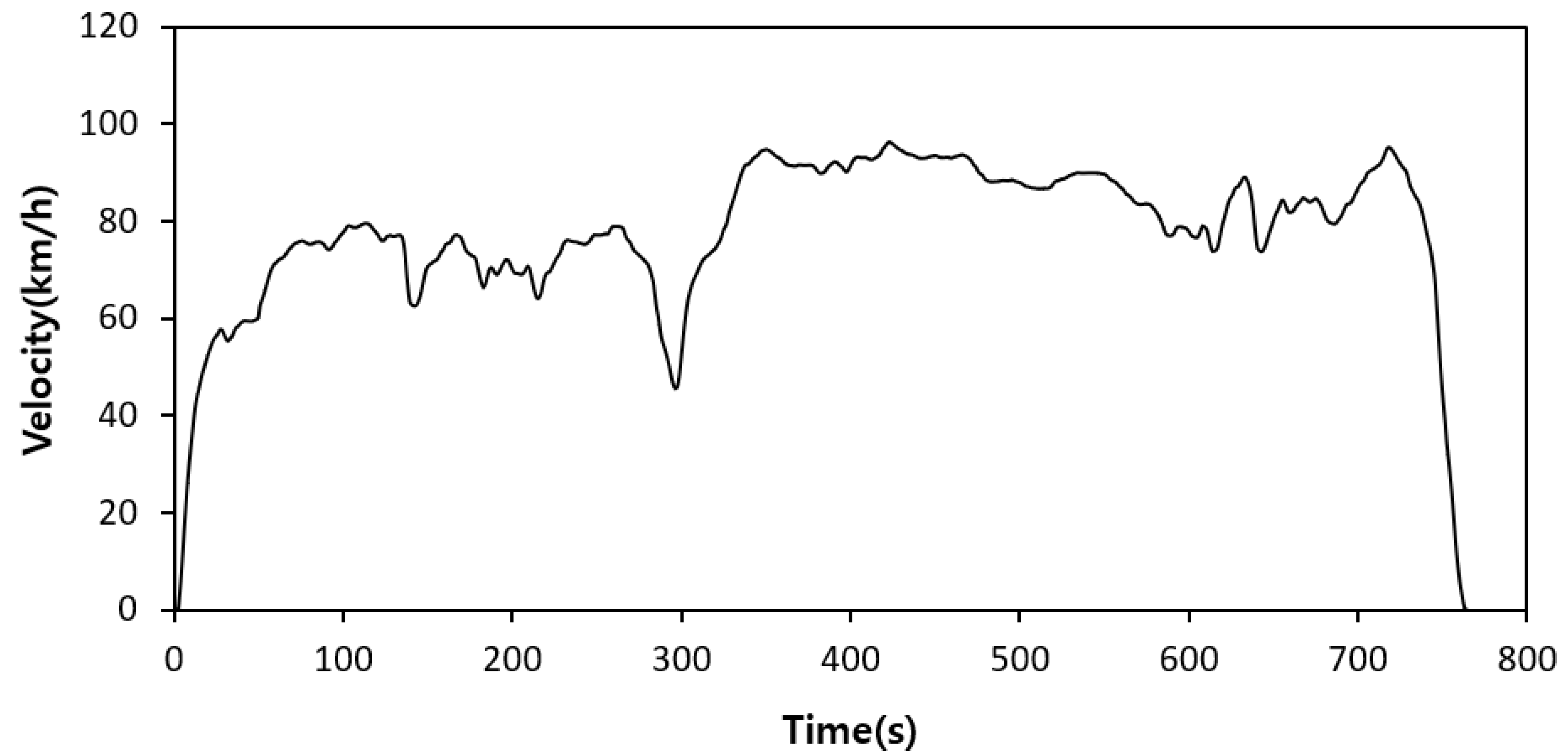
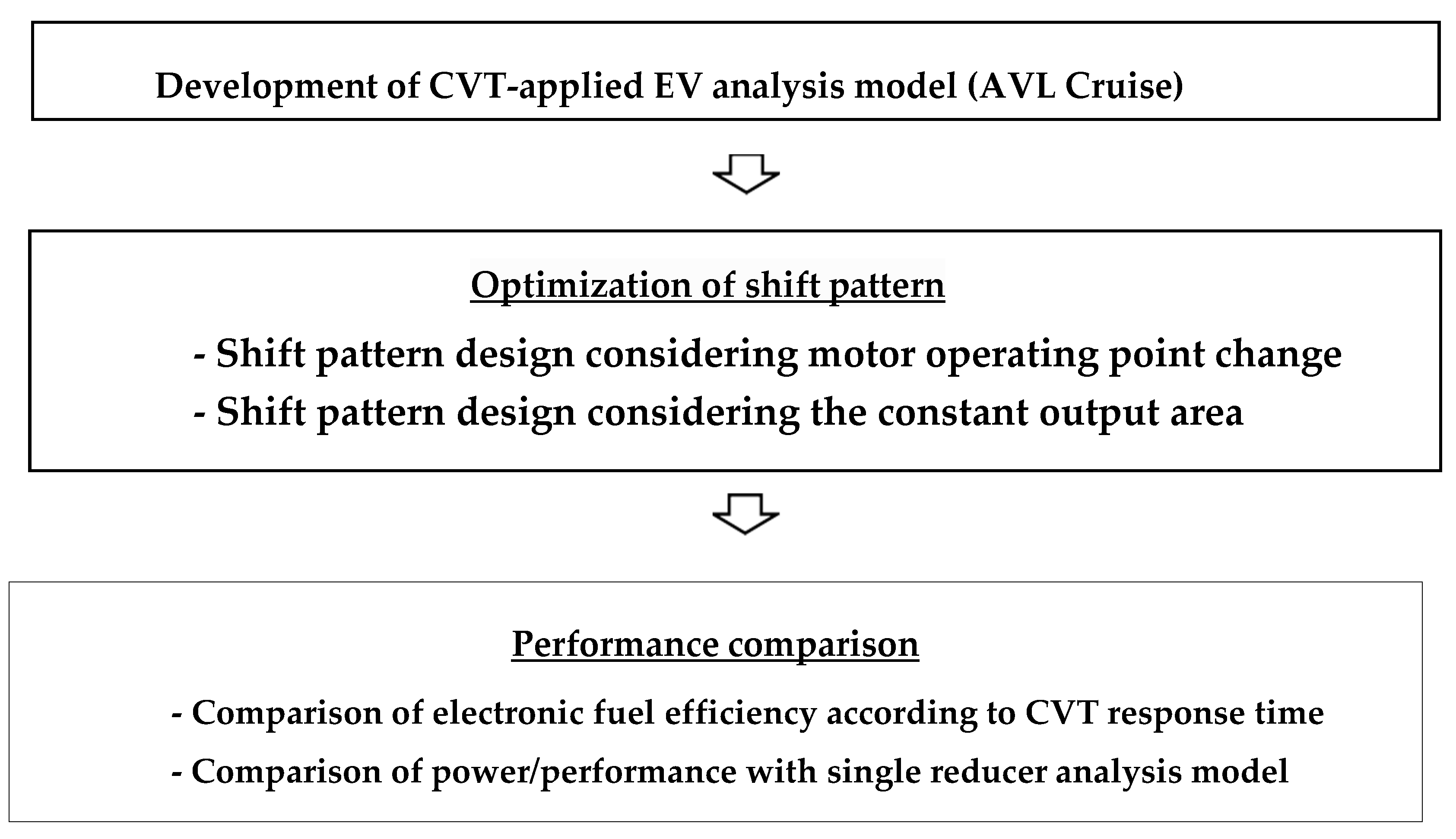
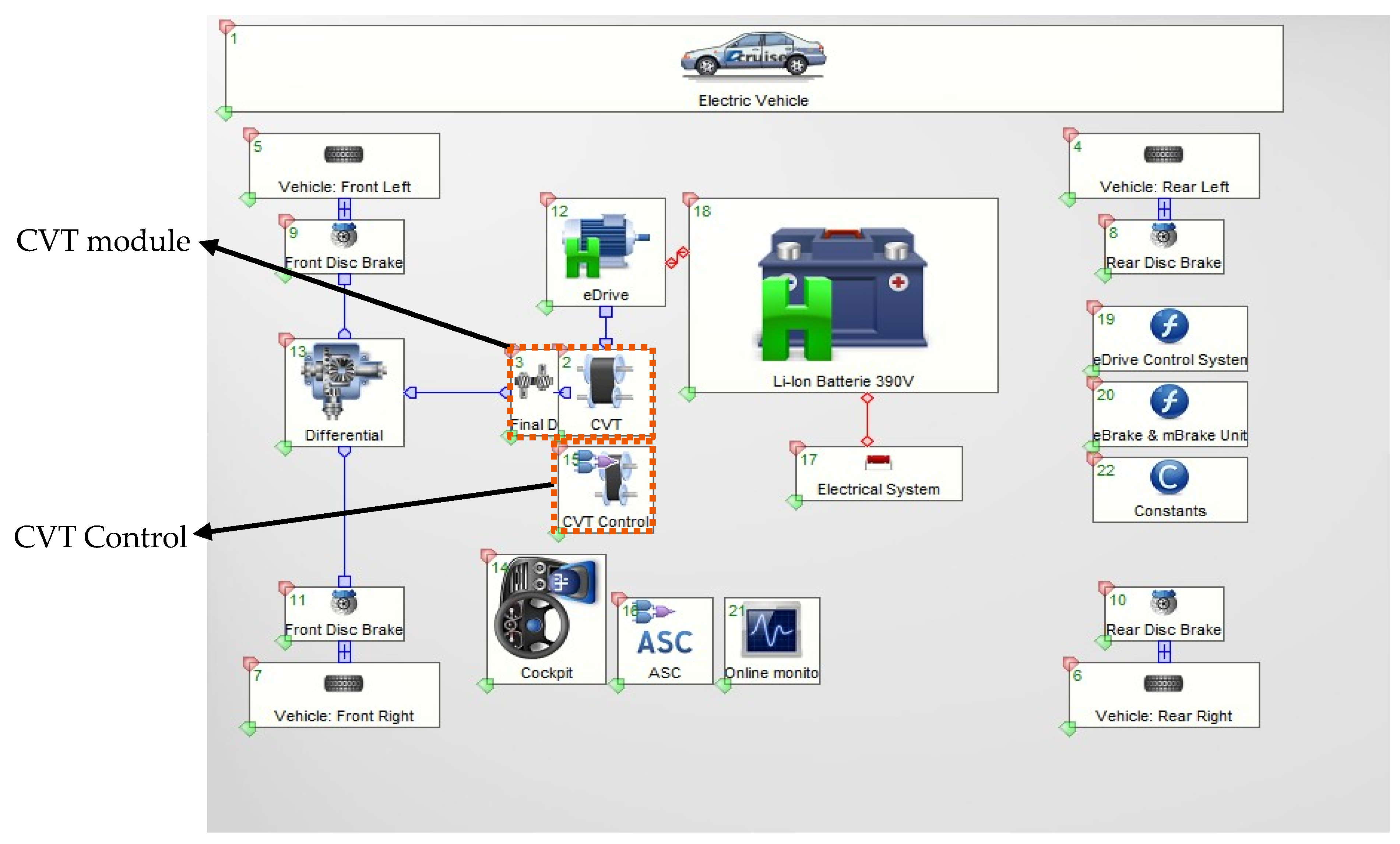
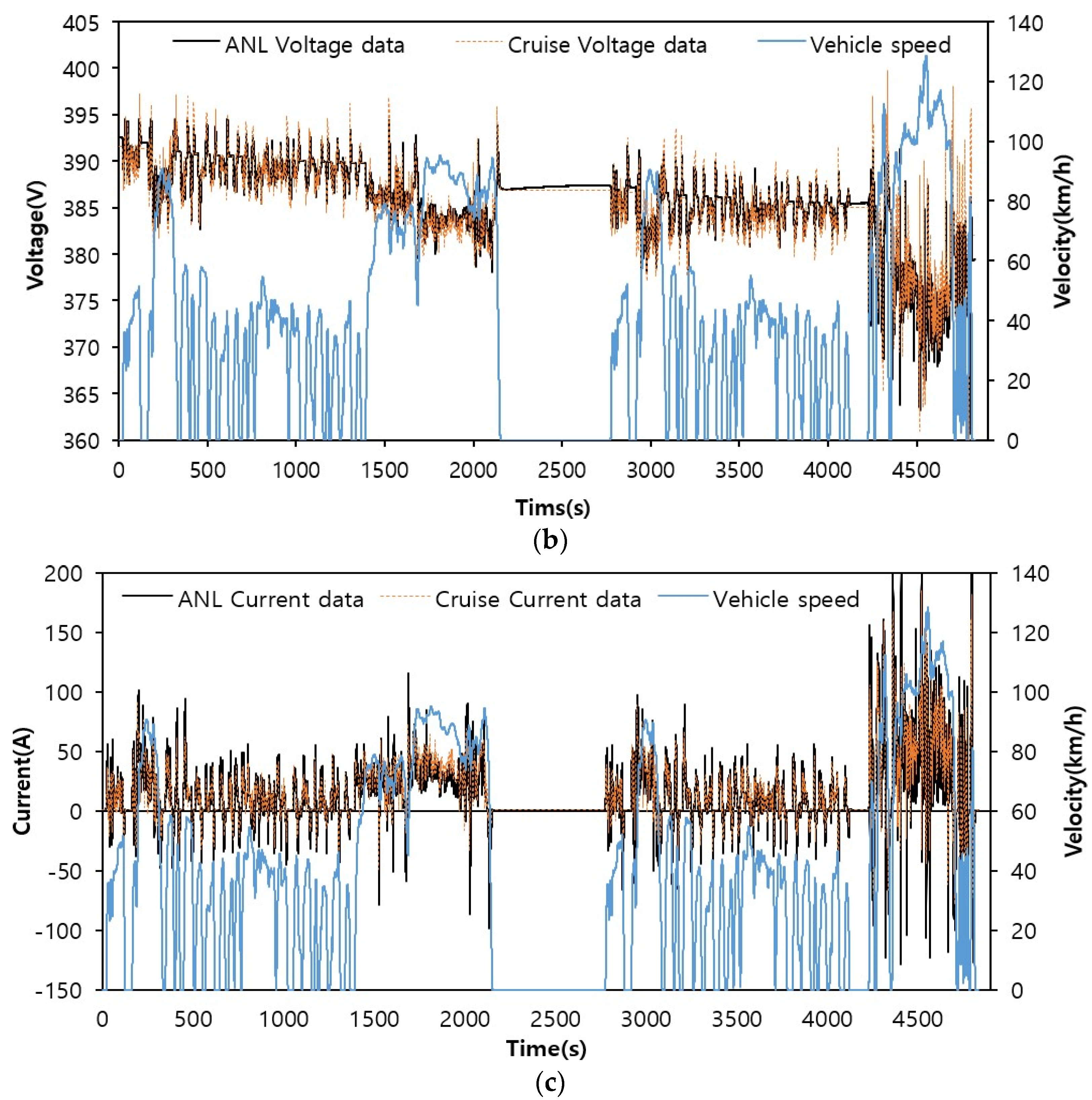
In this study, a simulation analysis model was developed using a CVT based on a commercial EV (Company B) model and actual driving data from the Argonne National Laboratory (ANL). ANL is the largest renewable clean energy/nuclear physics research institute in the United States. Then, the shift pattern of the CVT was optimized by considering the operating point change, constant output area, and transmission response speed. In addition, a performance comparison was made by applying a single reducer to the analytic model.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}




