Abstract
China is the largest vegetable producer in the world, and vegetable production is more geographically concentrated in the Huang-Huai-Hai region and the Yangtze River Basin. There are significant challenges ahead for increasing the average yields of the vegetables in this region. The effects of a cultivation system, a mulched ridge with a double row (MRDR), were evaluated by using the 2ZBX-2A vegetable transplanter newly designed in this paper. The key parameters of the equipment were designed and optimized by using the human–computer interaction method and the discrete element method according to agronomy requirements. Compared with the traditional ridge (TR) system on two typical solanaceous vegetables (eggplant and capsicum), the uniformities of the plant spacing and the planting depth in the MRDR system were significantly improved. Finally, the fresh fruit yield in the MRDR system increased significantly (p < 0.05) by 40.8% and 35.3% compared with that in the TR system for eggplant and capsicum, respectively. In addition, the water use efficiency (WUE) was also 54.9~59.7% higher under the MRDR system than under the TR system. All the results indicate that the MRDR system has the potential to improve the yields and WUE of solanaceous vegetables in the Huang-Huai-Hai Plain of China.
1. Introduction
Vegetables are an important part of the daily diet of humans. China is the largest vegetable producer in the world in terms of cultivation areas, with cultivation areas of over 10 million ha and a vegetable yield of 170 million tons []. At present, the five provinces with the largest production in China are Henan, Guangxi, Guizhou, Shandong, and Sichuan [,], which are more geographically concentrated in the Huang-Huai-Hai region and the Yangtze River Basin [,]. There are significant challenges ahead for the future of food. Measures must be taken imminently to increase the average yields of vegetables, as food production must be increased by 60–110% by 2050 to meet the growing demand [].
Much effort has been devoted to addressing vegetable production problems. Raised beds and plastic film covers are available to help growers achieve their production goals, including shortening the growth period, improving quality, and increasing yields []. A variety of vegetables, such as tomatoes, capsicum, and broccoli, can be successfully grown in the cultivation system in China []. A mass of transplanters and their components have been developed to plant vegetable plug seedlings on mulched raised beds []. Checchi & Magli company developed Wolf Pro serial transplanters to transplant vegetable seedlings on mulched ridges by using perforating cups []. Revolving spades were developed by Holland Transplanter company for mulch transplanters []. Ferrari Construzioni Meccaniche Srl developed FPC serial transplanters to accomplish film laying and seedling transplanting simultaneously in one pass []. Liu et al. [] and Hu et al. [] used the duck-billed transplanting mechanism with the planetary five-bar planting mechanism to plant potted tomato seedlings. Kubota corporation invented the SKP automated transplanter, which can realize the automatic transplanting of vegetable plug seedlings on mulched raised beds with single rows [].
Furthermore, proper planting patterns and distances are also very important to increase yield and to decrease interference from weeds []. In recent years, numerous researchers have attached increasingly more importance to high-yield colony structures in high-yield crop cultivation [,]. A triangular pattern on a wide mulched ridge with two rows has been reported to provide an optimum space to maximize vegetative parts, as it subsequently receives higher solar energy and results in the maximum yield [,]. Zhang et al. [] showed that double-row ridge planting increased maize yield more than single-row ridge planting. Grichar [] reported an average yield increase of 17% in twin-row planting over single-row planting along the Texas Gulf Coast. Chen et al. proved that the large-ridge double-row planting technology can generally increase soybean yield by more than 15% compared with the traditional single-row planting technology []. In China, Han et al. obtained the first positive results of using a double-row planting mode on tomato cultivation [].
The planting system of mulched raised beds and the cultivation system of ridges with double rows both have enormous potential for increasing the yields of vegetables, as illustrated above. However, little is known about the effects of using the above two systems simultaneously, especially on solanaceous vegetables in the Huang-Huai-Hai Plain of China. There is a need to conduct research on the cultivation system of mulched ridges with double rows and to develop affordable and suitable transplanters for this new system. The objective of this study was to develop a vegetable transplanter, the 2ZBX-2A model, for mulched ridges with double rows and to improve our understanding of the effects of this cultivation system on solanaceous vegetables in the Huang-Huai-Hai Plain of China by using the newly designed machine. The key parameters of the equipment were designed and optimized by using the human–computer interaction method and the discrete element method according to the agronomy requirements of the new cultivation system. The performance of the cultivation system of the mulched ridges with double rows was evaluated by comparing it with that of the traditional ridge system on two typical solanaceous vegetables (eggplant and capsicum).
2. Structure Design of the 2ZBX-2A Vegetable Transplanter
2.1. Machine Structure and Working Principle
The devised 2ZBX-2A compound vegetable transplanter was mainly composed of a transmission system, a rotary component, a ridging component, a watering system, a plastic film mulching component, a transplanting depth control system, and a double-crank five-bar planting mechanism (Figure 1). It can realize the working process of land preparation, ridging, plastic film mulching, transplanting, watering, etc., sequentially in one pass. The main working parts of the vegetable transplanter were arranged symmetrically along its longitudinal center line.
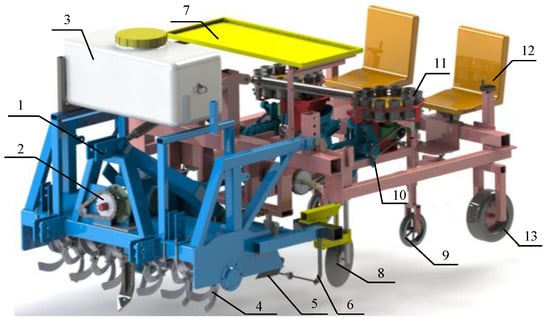
Figure 1.
Structure of the 2ZBX-2A compound vegetable transplanter. Note: 1, three-point hitch system; 2, transmission system; 3, watering system; 4, rotary component; 5, ridging opener; 6, plastic film frame; 7, plug seedling shelf; 8, soil-covering disc; 9, depth control system; 10, double-crank five-bar planting mechanism; 11, rotary delivery mechanism; 12, chain; 13, adjustable supporting wheel.
The machine was connected to a tractor through a three-point hitch system for operation. The transmission system of the 2ZBX-2A compound vegetable transplanter is shown in Figure 2. Before operation, the power take-off (PTO) shaft of the tractor was connected to the gearbox through a universal joint in order to transmit the power to the rotary component and the other working parts.
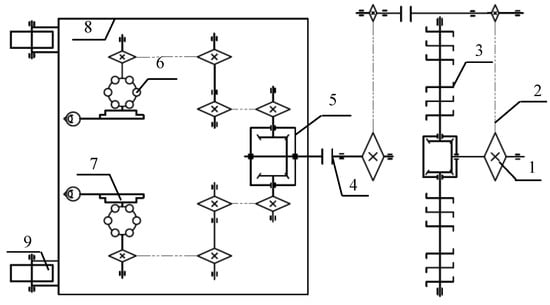
Figure 2.
Transmission system of the 2ZBX-2A compound vegetable transplanter. Note: 1, sprocket; 2, chain; 3, rotary blade group; 4, coupling; 5, gearbox; 6, rotary delivery mechanism; 7, double-crank five-bar planting mechanism; 8, frame; 9, ground wheel.
At the beginning of operation, the adjustable supporting ground wheels were set to the required height in order to satisfy the planting depth. The end of the plastic film was buried and compacted in advance. After the land preparation, ridging, and plastic film mulching processes, the seedlings were manually placed in the rotary seedling cups and transplanted on the mulched raised beds simultaneously. Meanwhile, the watering system was controlled by the key part of the double-crank five-bar planting mechanism to irrigate the planted seedlings one by one. The four-bar profiling depth control system was also equipped with each double-crank five-bar planting mechanism to ensure depth uniformity.
The 2ZBX-2A compound vegetable transplanting machine completed the vegetable cultivation of a wide mulched ridge with a double row one at a time (Figure 3). As shown in Table 1, the total mass of the transplanting machine was circa 730 kg, and its matched horsepower should be more than 80 Hp. By controlling the forward speed of the tractor and adjusting the driving sprocket with different numbers of teeth, the plant spacing could be adjusted. Moreover, since the rear power take-off shaft of the tractor was used to drive the executive components, a tractor with multiple low forward speeds was needed to drive the transplanting machine at a stable speed.
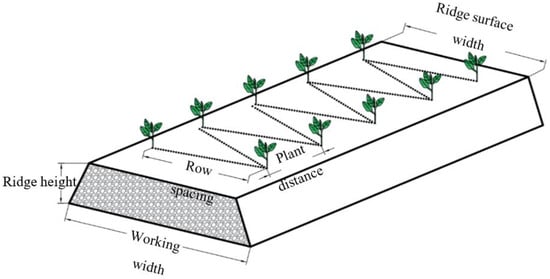
Figure 3.
Schematic diagram of cultivation system of mulched ridge with double row.

Table 1.
Technical parameters of the 2ZBX-2A compound vegetable transplanter.
2.2. Parameter Design of Double-Crank Five-Bar Planting Mechanism
The double-crank five-bar planting mechanism is the core component that affects the quality and efficiency of the transplanting operation. It should plant seedlings into the soil at a certain planting depth and high-qualified upright posture; otherwise, the plastic film would be teared or scraped irregularly []. During transplanting, the seedlings are dropped from the delivery cups into the planting duckbill, and then they are moved together with the double-crank five-bar planting mechanism. Thus, the planting duckbill should penetrate into the soil at nearly a straight line with the forward speed of the machine to realize a suitable upright posture of the seedlings.
The mathematical model of the mechanism is shown in Figure 4. Take the O point as the coordinate center, the horizontal direction as the x-axis, and the vertical direction as the y-axis in order to establish a rectangular coordinate system. The planting trajectory for point G, which is the point of the planting duckbill penetrating into the soil, is
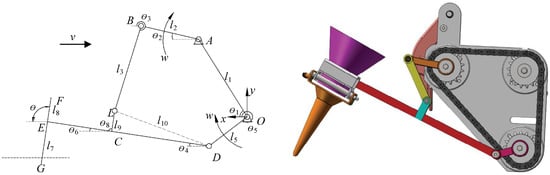
Figure 4.
Construction model of the double-crank five-bar planting mechanism. Note: O, A, B, C, D, E, F, G, and L, hinge points of each bar; l1, length of crank OA; l2, length of crank AB; l3, length of connecting rod BL; l4, length of link CD; l5, length of crank OD; l6, length of link CE; l7, length of the lower end of planter EG; l8, length of the top end of planter EG; θ1, initial installation angle of rack OA; θ2, initial installation angle of rack OA; θ3, angular displacement of link BC; θ4, angular displacement of link DC; θ5, initial installation angle of crank OD; θ6, fixed connection angle of planter FG and connecting rod CE; θ7, angular displacement of link BC.
According to the established conditions of the double-crank five-bar assembly [,], the above variables should meet the following limitations:
Here,
where, lBDmax and lBDmin are the maximum and minimum values of the distance between hinge points B and D, respectively.
According to formula (1), the first derivative of the planting trajectory of point G was obtained as follows:
According to Equation (4), the extreme values of lBD, i.e., the maximum and minimum values, could be obtained. According to the mechanical design principles and requirements [], the initial values of the parameters were determined to be l1 = 270 mm, l2 = 150 mm, l5 = 140 mm, l6 = 150 mm, l7 = 100 mm, l8 = 70 mm, l9 = 280 mm, θ1 = 25°, θ2 = 20°, θ5 = 310°, θ7 = 90°, and θ8 = 90°. Then, the GUI module [] was used to optimize the planting track of the double-crank five-bar planting mechanism (Figure 5).
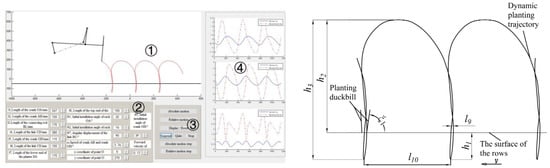
Figure 5.
Human–computer visual interface of five-bar transplanting mechanism. Note: ①, auxiliary analysis and optimization interface includes image display area; ②, parameter range input determination area; ③, control panel area; ④, velocity and acceleration analysis area.
Based on the human–computer visual interface of the five-bar transplanting mechanism, the parameters of the planting mechanism were optimized by analyzing the relationship between the machine operation speed, planting distance, and the dynamic transplanting trajectory so that the seedlings could be planted with an upright posture.
The following optimization objectives should be considered when optimizing the parameters: (1) The angle of ξ1 between the track of the bottom of the planter end and the ridge line is better when close to 90°; (2) within a single movement period, a smaller distance l9 between the planter’s movement track and the ridge line is better to ensure the minimum film tear; (3) the vertical distance between the lowest point of the planter’s movement trajectory and the ridge line is the transplanting depth h1, and the value of h1 ranges from 50 mm to 100 mm; and (4) the overall height of the planting trajectory is h3 > 330 mm in order to ensure the design and installation space of planting institutions. As a result, the optimized values of the parameters were determined to be l1 = 258 mm, l2 = 152 mm, l3 = 276 mm, l4 = 290 mm, l5 = 145 mm, l6 = 158 mm, l7 = 103 mm, l8 = 63 mm, l9 = 280 mm, θ1 = 23.2°, θ2 = 13.8°, θ5 = 322.7°, and θ6 = 90°.
2.3. Design of Opening and Closing Control Mechanism of Planting Duckbill
2.3.1. Parameter Design of the Planting Duckbill
The planting duckbill is the key equipment for ensuring that the seedlings are planted at the right time. Missed planting occurs when the planting duckbill is opened or closed either too early or too late. The opening and closing control mechanism should keep the planting duckbill in a closed state to catch the seedling, which drops from the rotary delivery mechanism when the planting duckbill is moved to the highest point of the moving trajectory, while the mechanism should open the planting duckbill when it is inserted into the soil in order to transplant the plug seedlings into the film mulched ridge. As shown in Figure 6, according to the operation characteristics of the planting mechanism, the cartesian coordinate system of the cam opening and closing mechanism was established. In order to reduce the unsuitable rate of seedling transplantation caused by the planting duckbill, an opening and closing control sequence was designed.
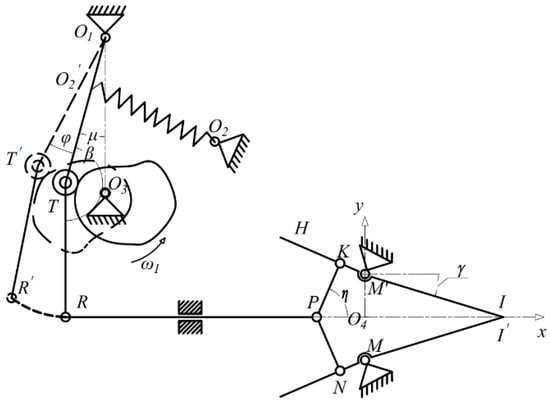
Figure 6.
Schematic diagram of the opening and closing control mechanism of the planting duckbill. Note: I, the end point of the transplant duck’s beak; O4, the pivot center of the duck’s beak; M and M’, the articulation points on the transplant duck’s beak; RP, the pull cable acting on the hinge point P; O3, the cam rotation center; T, the lowest point of the roller center; T’, the highest point of the roller center; R, the lowest point of the drive cable; R’, the highest point of the drive cable; μ, the initial angle of the pendulum O1T; β, the fixation angle of the swing rod O1T and pull rod TR; φ, the swing angle of the pendulum rod O1T; γ, the angle between the KI side of the planting duckbill and the x direction.
As shown in Figure 6, the coordinate equation of point I(xI, yI) can be obtained according to the geometric relationships:
where xI and yI are the horizontal and vertical coordinates of point I, respectively, in mm; lM’I is the length of the M’I segment of the planting duckbill in mm. According to the coordinate equation of point I, the coordinate equations of point R in the cartesian coordinate system of the opening and closing mechanism of the cam for controlling the planting duckbill were obtained as follows:
When the planting duckbill was opened to the maximum, end point R of the draw line moved to the extreme position, and the coordinate equation of point was solved as follows:
On the basis of the coordinate equations of the above points, point T and the pendulum O1T were analyzed; the coordinate equation of point T was obtained according to the geometric relationships as follows:
The distance DTO3 from the roller center T to the cam rotation center O3 was determined as follows:
where xO3 and yO3 are the abscissa and the ordinate of the cam rotation center O3, respectively. Then, the cam base circle radius r0 = minDTO3.
Based on the above mathematical models, a DEM simulation of the interaction between the plug seedling (seedling substrate size: 30 mm × 30 mm × 40 mm) and the planting duckbill was carried out to determine the optimization value of angle γ (Figure 7). In the simulation, the solanaceous vegetable seedling tray size was determined to be 30 mm × 30 mm× 40 mm according to the seedling cultivate standard.
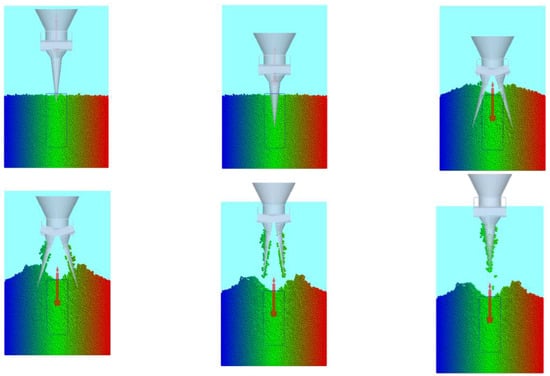
Figure 7.
DEM simulation of the interaction between the plug seedling and the planting duckbill.
With the help of the simulation, the minimum distance lII’ required to avoid the plug seedling seizure in the opening state of the planting duckbill was determined to be 30 mm. Furthermore, the corresponding yI values of the maximum and minimum distances of the planting duckbill were yImax = 35 mm and yImin = 15 mm, respectively. Moreover, as shown in Table 2, the distances between the center of rotation of the cam and the point on the cam contour line and the angle value of the swing rod were obtained, which are denoted as R1 and φ1, and R2 and φ2, respectively. The smaller values of R1 and R2 are the radii of the base circle of the cam r0; that is, r0 = minRi, and φ1 − φ2 is the maximum swing angle of the swing rod φmax. According to the above equation, r0 is 21 mm, and φmax is 13.2°.
Table 2.
Parameters of the planting duckbill.
2.3.2. Parameter Design of the Opening and Closing Control Mechanism
In the process of solanaceous vegetable transplantation, the cam opening and closing sequence should cooperate closely with the movement of the double-crank five-bar planting mechanism in a rhythmical manner to ensure transplantation accuracy. Thus, the cam movement should meet the following requirements:
Planting section (push section) UV: When the roller T and cam contour U make contact at the beginning of the transplantation, the pendulum rod swings clockwise around point O1 and drives pull line RP so that the two duck mouths quickly open. At point V, plug seedlings fall into the soil and are planted. At this time, the opening distance of the duckbill reaches the maximum.
Hold section (far rest section) VW: At this stage, the distance between the planting duckbill should always be kept at the maximum so as to prevent the planting duckbill from touching the planted plug seedling and causing the seedling to fall, thus improving the plug seedling planting rate.
Connecting seedling section (return section) WX: The pendulum rod rotates counter clockwise towards O2 under the function of spring O2U. When the planting duckbill moves to the highest point X, its mouth closes gradually. The planting duckbill closes completely as the roller falls back to the T point position. At the same time, the rotary delivery mechanism drops the solanaceous vegetable plug seedling into the closed planting duckbill.
Seedling transport section (nearest section) XU: The pendulum is in a static state, while the duckbill is kept in a closed state for seedling transportation.
According to the principle of the inversion method, the line between O1 and O3 was taken as the y-axis of the coordinate system (Figure 8). During the inversion movement, when the swing rod rotated at the δ angle relative to the cam, the swing rod was at the position shown in the graph , and its angular displacement was δ.
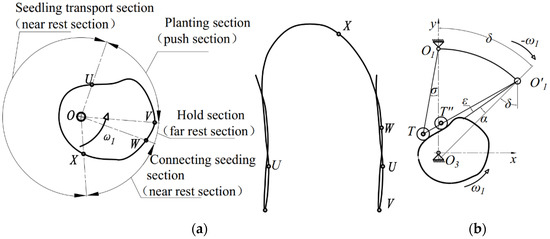
Figure 8.
Schematic diagram of the cam, which controls the opening and closing of the planting duckbill. (a) Work sections of the cam and corresponding location on relative trajectory; (b) coordinate system of oscillating roller push rod cam mechanism. Note: U, the starting point of seedling planting; V, the end point of seedling planting; W, the closed point of duckbill; X, the start point of seedling pickup.
Since the vegetable transplanting machine works at a high speed with a light load, the planting process needs to be stable and quick during the operation of the planting mechanism. Thus, the quantic polynomial motion law was selected to design a cam contour curve in order to avoid vibration. Combined with the kinematics of the cam mechanism, the cam parameters and the cam contour curve were obtained (Equation (10)).
Since the pressure angle of the mechanism is an important index in the measurement of the difficulty in the movement of the mechanism, the maximum pressure angle of the cam should not exceed the critical pressure angle αc in practical design. The cam mechanism pressure angle was determined as follows:
where α is the cam pressure angle; is the length of the pendulum rod; and is the distance between the fixed end O1 and the cam rotation center O3. The calculated cam parameters are shown in Table 3. The maximum pressure angle was 43.5° when the cam turned 0°~75° in the push stage, and it was 62.3° when the cam turned 90°~155° in the return stage, both of which meet the allowable pressure angle conditions [].
Table 3.
Parameters of the opening and closing control cam for planting duckbill.
3. Materials and Methods
In order to evaluate the effects of the cultivation system of a mulched ridge with a double row on solanaceous vegetables in the Huang-Huai-Hai Plain of China, a comparative field experiment was conducted.
3.1. Test Conditions and Equipment
The experiment was carried out at the Zhangqiu experimental station ((36°40′ N, 117°31′ E)) of Shandong Academy of Agricultural Machinery Science in May 2021. The test plot was 65 m long, and the terrain was flat with no weeds and a stubble coverage. According to the USDA texture classification system, the soil at the station was silt loam. The water content of the surface layer (0~5 cm deep) was 12.7%, and the water content of the lower layer (5~10 cm deep) was 15.1%.
The 2ZBX-2A compound vegetable transplanting machine was manufactured by Shandong Shuangjia Agriculture and Animal Husbandry Co., Ltd., Jinan, Shandong, China. The transplanting machine equipped with a tractor with 80 Hp, was used in the experiment to transplant solanaceous vegetables in the cultivation system of a mulched ridge with a double row. During the transplanting process, the tractor moved forward at a speed of 1.1 km/h.
3.2. Experimental Design
Two kinds of solanaceous vegetables (eggplant, variety jifeng 4, and capsicum, variety jinhong 10) were chosen for the field experiment. The cultivation system of a mulched ridge with a double row (MRDR) was compared with the traditional ridge (TR) system for these two kinds of vegetables. The ridge height of the two cultivation systems was 15 cm.
As shown in Figure 9a, for the MRDR system, a high-density white polyethylene film (0.01 mm thick and 1.1 m wide) was used as the mulching plastic. According to the agronomic requirements, the eggplant was transplanted in the MRDR system with a ridge width of 120 cm, a row spacing on the same ridge of 60 cm, and a plant spacing of 40 cm, while it was transplanted in the TR system with a ridge width of 60 cm and a plant spacing of 40 cm. The capsicum was planted with a mulched-ridge width of 120 cm, a row spacing on the wide ridge of 60 cm, and a plant spacing of 30 cm in the MRDR system, while it was planted with the traditional ridge width of 60 cm and a plant spacing of 30 cm in the TR system.
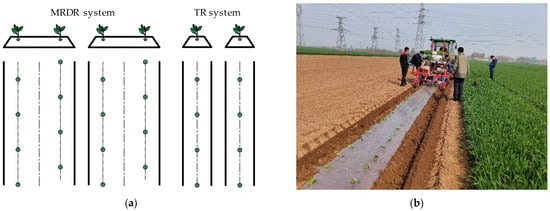
Figure 9.
The field experiments. (a) The comparative treatments; (b) the 2ZBX-2A compound vegetable transplanter under the MRDR system.
In the MRDR system, the 2ZBX-2A compound vegetable transplanting machine was used for both eggplant and capsicum transplantation. In the TR system, a traditional ridge machine was used, and the vegetables were planted manually. In all the treatments, the planting depth required was 10 cm.
The transplanting qualities and yields of the eggplant and capsicum plug seedlings in the MRDR and TR cultivation systems were assessed using 12 split-plots in three complete, randomized blocks (i.e., three replications). Each plot was 2.5 m wide and 30 m long. Before the transplanting operation of the two above treatments, the field was prepared using a combined soil preparation machine. In the MRDR system, a drip irrigation pipe was laid under the film in the middle of the ridge, while in the TR system, a drip irrigation pipe was loaded besides the seedlings after they had been transplanted manually. The field test site is shown in Figure 9b.
3.3. Measurements
3.3.1. Uniformities of Plant Spacing and Planting Depth
In each replication, the plant spacing and planting depth of more than 60 and 30 planted plug seedlings, respectively, were measured for a randomly selected planting row. The uniformities of the plant spacing [,] and planting depth were calculated as follows:
where CVX is the plant spacing coefficient of variation used to assess the uniformity of the plant spacing; n is the measured number of planted seedlings; Xi is the measured plant spacing in cm; CVH is the planting depth coefficient of variation used to assess the uniformity of the planting depth; and Yi is the measured plant spacing in cm.
3.3.2. Yield
At harvest (the end of September), one square of 4 m2 (2 m 2 m) from the middle two ridges of each plot was reserved for yield samplings to determine the fruit fresh yield (YF) (kg/m2) and fruit mean weight (g).
3.3.3. Water Use Efficiency
Apparent evapotranspiration (AET) was calculated using a simplified water balance equation []:
where P is the in-crop rainfall, I is the irrigation applied during the transplanting period, and ΔS is the change in the stored soil water in the soil profile (0 to 1 m depth) at harvest.
ET = (P + I) − ΔS
Production water use efficiency (WUE) was calculated as the crop yield (kg/ha) divided by the growing-season evapotranspiration (mm):
3.3.4. Data Analysis
The mean values were calculated for each of the measured variables, and ANOVA was used to assess the effects of the MRDR cultivation system on the eggplant and capsicum with the 2ZBX-2A compound vegetable transplanting machine in comparison with those of the TR cultivation system. When ANOVA indicated a significant F-value, multiple comparisons of annual mean values were performed using the least significant difference (LSD) method. In all analyses, a probability of error smaller than 5% (p = 0.05) was considered statistically significant.
4. Results and Discussion
4.1. Uniformity of Plant Spacing and Planting Depth
As shown in Table 4, the mean plant spacings of the eggplant were 40.30 cm and 42.77 cm in the MRDR system and the TR system, respectively. Meanwhile, the plant spacing was 30.60 cm in the MRDR system and 32.47 cm in the TR system for the capsicum. No significant (p > 0.05) differences were found between them. The plant spacing coefficient of variation was negative. The uniformity of the plant spacing in the MRDR system was significantly (p < 0.05) higher than that in the TR system, possibly due to the stability of the 2ZBX-2A compound vegetable transplanter. The machine could better meet the requirements of plug vegetable seedling transplanting operations [].
Table 4.
Transplanting quantities of eggplant and capsicum under the MRDR and TR cultivation systems. Note: means of the same crop within a column followed by the same letters are not significantly different at p = 0.05.
To meet the agronomy requirements, the mean planting depths of the eggplant and capsicum in the TR system were around 10 cm. For the eggplant, a significant difference (p < 0.05) in the planting depth was found between the MRDR system and the TR system. The planting depth qualified rate reached 95% in all treatments, and this is consistent with the results obtained in other studies [,,].
4.2. Yield of Solanaceous Vegetables
The effects of the cultivation systems on the eggplant and capsicum yields were significantly different. The fresh fruit yield of the eggplant in the MRDR system increased by 40.8% (p < 0.05) compared with that in the TR system. While the average capsicum yield in the MRDR system was 35.3% higher than that in the TR system (Figure 10). The improvement in the yields of these solanaceous vegetables (eggplant and capsicum) under the MRDR system may be due to the application of the plastic mulch, which has been proved to be effective in increasing plant yields [,]. In addition, the optimal plant spacing uniformity obtained via the 2ZBX-2A compound vegetable transplanter may also contribute to the higher yield achieved in the MRDR system. Iwuagwu et al. [] and Boomsma [] found that plant spacing did not have a significant effect on fruit weight but that plant-to-plant uniformity was essential for the optimum yield. The MRDR plant system has better water and nutrient absorption efficiencies, resulting in a higher dry matter accumulation and yield, according to Wang et al. [].
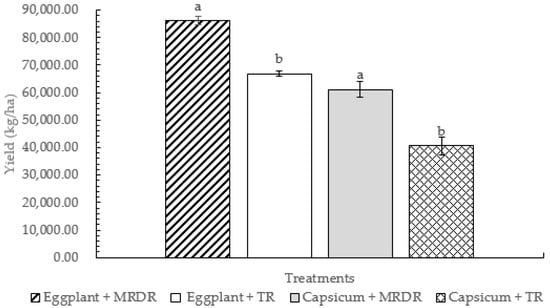
Figure 10.
Fresh yields of eggplant and capsicum under the MRDR and TR cultivation systems. Note: means of the same crop within a column followed by the same letters are not significantly different at p = 0.05.
4.3. Water Use Efficiency
The change in the soil water content ΔS was not significantly different, while the WUE was 59.7% and 54.9% significantly (p < 0.05) higher under the MRDR system than the TR system for the eggplant and capsicum, respectively, in the field experiment (Table 5). The slight difference in ΔS might generally be due to the rainfall from May to September in 2021, which was 179.7% higher than that in 2020. The ΔS results are similar to those found by Snyder et al. [], who reported that, when soil in an uncovered plot reached moisture levels of more than 35% (typically following rainfall), the mulch-covered plots were drier by 5% to 10% on average.
Table 5.
Water use efficiency for eggplant and capsicum under the MRDR and TR cultivation systems. Note: means of the same crop within a column followed by the same letters are not significantly different at p = 0.05.
The results reported here also demonstrate that the WUE of the MRDR system was associated with the trending yield improvement Since plastic film mulch has been reported to be effective in improving soil water storage during early crop growth [,], the MRDR system has the potential to improve the WUE further, which is extremely important in the Huang-Huai-Hai Plain. Diaz-Perez et al. [] also reported that there is a potential to save water by reducing current irrigation rates without negatively impacting fruit yields. Ustroyev et al. [] believed that this planting pattern helps maintain soil temperature and improve soil temperature conditions.
5. Conclusions
In this study, the effects of the cultivation system of the MRDR system on solanaceous vegetables in the Huang-Huai-Hai Plain of China were evaluated by making comparisons with those of the TR system. The 2ZBX-2A compound vegetable transplanter for the MRDR system, which can finish the transplanting operation in one pass, was also developed. The main conclusions were as follows:
- (1)
- A vegetable transplanter, the 2ZBX-2A model, for a mulched ridge with a double row was designed and optimized by using the human–computer interaction method and the discrete element method according to the agronomy requirements of the new cultivation system.
- (2)
- The uniformities of the plant spacing and depth in the MRDR system were significantly (p < 0.05) higher than those in the TR system due to the use of the newly designed equipment. The plant-to-plant uniformity makes the MRDR system more competitive. As a result, the fresh fruit yield of the eggplant in the MRDR system increased by 40.8% (p < 0.05) compared to that in the TR system, while the average capsicum yield in the MRDR system was 35.3% higher than that in the TR system.
- (3)
- The WUE was 59.7% and 54.9% significantly (p < 0.05) higher under the MRDR system than the TR system for the eggplant and capsicum, respectively, in the field experiment.
The results of this research indicate that the MRDR system has the potential to improve the yields and WUE of eggplant and capsicum in the Huang-Huai-Hai Plain. Most scholars have studied the effects of the TR system on the transplanting of vegetables, and the results of the MRDR cultivation system on direct seeding are also positive, but there is less research on the relevant cultivation methods and applicable tools of the cultivation mode of MRDR on vegetables. Therefore, this paper carried out preliminary research, which has specific research significance. For further research, the authors will investigate the density of a mulched ridge with double-row planting; that is, the authors will investigate the effects of different ridge spacings, row spacings, and plant spacings on the final yield.
Author Contributions
Conceptualization, T.H. and H.L. (Hui Li); Methodology, S.S.; Machine design, T.H.; Parameter optimization, Y.S.; Field experiment, X.L. and H.L. (Hu Liu); Validation, J.Z.; Data curation, S.S.; Writing—original draft preparation, H.L. (Hui Li); Writing—review and editing, T.H.; Supervision, S.S.; Project administration, W.J.; Funding acquisition, H.L. (Hui Li). All authors have read and agreed to the published version of the manuscript.
Funding
This research was funded by the National Natural Science Foundation of China (Grant No. 32201683), Opening Foundation of Huang Huai Hai Key laboratory of Modern Agricultural Equipment by Ministry of Agriculture and Rural Affairs of China (Grant No. NJY2022QN05), and the Shandong Tobacco Industry technology system.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- FAO (Food and Agriculture Organization). FAOSTAT Online Statistical Database: Crops and Livestock Products 2020. Available online: http://www.fao.org/faostat/zh/#data/QC (accessed on 17 February 2022).
- Textor, C. Vegetable in China 2020, by Region. Available online: http://www.statista.com/statistics/242132/vegetable-acreage-in-china-by-province/ (accessed on 26 November 2021).
- Ji, L.; You, L.; See, L.; Fritz, S.; Li, C.; Zhang, S.; Li, G. Spatial and temporal changes of vegetable production in China. J. Land Use Sci. 2018, 13, 494–507. [Google Scholar] [CrossRef]
- Ministry of Agriculture and Rural Affairs of the People’s Republic of China. Available online: http://www.moa.gov.cn/nybgb/2012/dsanq/201805/t20180512_6141970.htm (accessed on 16 October 2022).
- Song, X.D.; Yang, L. 700 million mu of farmland is trapped and there is a shortage of “micro agricultural machinery”. China Comment 2022, 9, 65–67. [Google Scholar]
- Tilman, D.; Balzer, C.; Hill, J.; Befort, B.L. Global food demand and the sustainable intensification of agriculture. Proc. Natl. Acad. Sci. USA 2011, 108, 20260–20264. [Google Scholar] [CrossRef] [PubMed]
- Wicks, G.A.; Popken, D.H.; Mahnken, G.W.; Hanson, G.E.; Lyon, D.J. Survey of winter wheat (Ttriticum aestivum) stubble fields sprayed with herbicides in 1998: Cultural practices. Weed Technol. 2003, 17, 467–474. [Google Scholar] [CrossRef]
- Jin, X.; Li, D.Y.; Ma, H.; Ji, J.T.; Zhao, K.X.; Pang, J. Development of single row automatic transplanting device for potted vegetable seedlings. Int. J. Agric. Biol. Eng. 2018, 11, 67–75. [Google Scholar] [CrossRef]
- Prasanna, G.V.; Raheman, H. Vegetable Transplanters for Use in Developing Countries—A Review. Int. J. Veg. Sci. 2008, 14, 232–255. [Google Scholar]
- Checchi & Magli Transplanters. Available online: https://www.checchiemagli.com/macchine/trapiantatrice-wolf-pro/ (accessed on 25 January 2022).
- Mulch Equipment–Holland Transplanter. Available online: https://transplanter.com/mulch-equipment/ (accessed on 29 September 2016).
- FPC Layer and Transplanter. Available online: https://ferraricostruzioni.com/en/film-transplanters/23-fpc-layer-and-transplanter.html (accessed on 19 May 2022).
- Liu, J.; Cao, W.; Tian, D.; Zhao, H. Kinematic Analysis and Test on Transplanting Mechanism with Effective Zero-speed Transplanting on Mulch Film. J. Mech. Eng. 2017, 53, 76–84. [Google Scholar] [CrossRef]
- Hu, F.; Guo, D.; Chen, C.R.; Yan, H.; Yi, W.Q.; Yu, H.M. Design and Experiment on Compound Crank Rocker Double-row Planting Device of Vegetable Plug Seedling Up-film Transplanter. Trans. Chin. Soc. Agric. Mach. 2021, 52, 62–69. [Google Scholar]
- Kubota Corporation. Kubota Agricultural Related Products. Available online: https://agriculture.kubota.co.jp/product/kanren/ (accessed on 26 September 2022).
- Tilley, M.S.; Jordan, D.L.; Heiniger, R.W.; Vann, R.A.; Crozier, C.R. A survey of twin-row cropping systems in North Carolina. Crop Forage Turfgrass Manag. 2021, 7, e20099. [Google Scholar] [CrossRef]
- Wang, H.X.; Liu, Y.F.; Song, Q.B.; Lu, Y.; Han, X.R.; Shi, Q.W. Effects of Different Planting Modes on Peanut Photosynthetic Characteristics, Leaf Area Index and Yield in the Sandy Area. Adv. Eng. Res. 2015, 8, 982–986. [Google Scholar]
- Bruns, H.A.; Ebelhar, M.W.; Abbas, H.K. Comparing single-row and twin-row corn production in the Mid South. Crop Manag. 2012, 11, 1–8. [Google Scholar] [CrossRef]
- Amzad, H.; Yukio, I.; Keiji, M.; Hikaru, A. Effects of Planting Pattern and Planting Distance on Growth and Yield of Turmeric (Curcumalonga L.). Plant Prod. Sci. 2005, 8, 95–105. [Google Scholar]
- Habtamu, T.; Mnuyelet, J. Influences of spacing on yield and root size of carrot (Daucus carota L.) under ridge-furrow production. Open Agric. 2021, 6, 826–835. [Google Scholar]
- Zhang, Y.; Wang, H.B. Effects of different tillage patterns on soil physical and chemical properties and growth of maize. Jiangsu Agric. Sci. 2018, 46, 58–64. [Google Scholar]
- Grichar, W.J. Row spacing, plant populations, and cultivar effects on soybean production along the Texas gulf coast. Crop Manag. 2007, 6, 1–6. [Google Scholar] [CrossRef]
- Chen, W.P.; Hu, P.J.; Zhang, B.C.; Qiu, T.Y.; Yang, S.D. Design and experiment of no-tillage precision planters with staggered seedling belts for soybean. J. Chin. Agric. 2022, 43, 1–7. [Google Scholar]
- Han, Y.Z.; Wang, X.J.; Liu, H.Y.; He, Z.G.; Dong, H.; Lou, C.R. Study on Protected Tomato Growth and Soil Nitrate Nitrogenunder Double Row Planting Mode. J. Liaoning Agric. Sci. 2022, 323, 80–83. [Google Scholar]
- Wang, P.; Meng, Z.J.; An, X.F.; Chen, J.P.; Li, L.W. Relationship between Agricultural Machinery Power and Agricultural Machinery Subsoiling Operation. Trans. Chin. Soc. Agric. Mach. 2019, 50, 87–90. [Google Scholar]
- Shi, T. Development and Test of Automatic Corn Seedling Transplanter. Trans. Chin. Soc. Agric. Eng. 2015, 31, 23–30. [Google Scholar]
- Li, Y. Mechanism analysis and synthesis. In Mechanical Principle, 1st ed.; Wei, W., Gao, Y., Zhang, Y., Eds.; China Agricultural University Press: Beijing, China, 2005; pp. 22–38. [Google Scholar]
- Xu, G.W.; Liu, H.X.; Farman, A.C. Design and Test of Tilted Transplanting Mechanism on Mulch-film of Salvia Miltiorrhiza. Trans. Chin. Soc. Agric. Mach. 2019, 50, 78–89+101. [Google Scholar]
- Sun, K.; Ge, R.Y.; Li, T.Y.; Wang, J.T. Design and Analysis of Vegetable Transplanter Based on Fivebar Mechanism. IOP Conf. Ser. Mater. Sci. Eng. 2019, 692, 012029. [Google Scholar] [CrossRef]
- Tan, Y.S.; Zhan, D.H.; Zhang, P.H. Analysis and compensation of end position error of rigid flexible coupling serial manipulator. Trans. Chin. Soc. Agric. Mach. 2021, 52, 416–426. [Google Scholar]
- Sun, H.; Chen, Z.M.; Ge, W.J. Mechanical Principle, 7th ed.; Higher Education Press: Beijing, China, 2006; pp. 251–252. [Google Scholar]
- Ministry of Industry and Information Technology of the People’s Republic of China. JB/T 10291-2013 Transplanter of Dry Land Plant; Machinery Industry Press: Beijing, China, 2013. [Google Scholar]
- Ministry of Agriculture and Rural Affairs of the People’s Republic of China. NY/T 3486-2019 Operating Quality for Vegetable Transplanter; China Agricultural Press: Beijing, China, 2019. [Google Scholar]
- Wang, Q.J.; Lu, C.Y.; Li, H.W.; He, J.; Khokan, K.S.; Rabi, G.R.; Liang, Z.H.; Qiao, X.D.; Li, H.; Allen, D.J. The effects of no-tillage with subsoiling on soil properties and maize yield: 12-Year experiment on alkaline soils of Northeast China. Soil Tillage Res. 2014, 137, 43–49. [Google Scholar] [CrossRef]
- Jin, X.; Cheng, Q.; Zhao, B.; Ji, J.; Li, M. Design and test of 2ZYM-2 potted vegetable seedlings transplanting machine. Int. J. Agric. Biol. Eng. 2020, 13, 101–110. [Google Scholar] [CrossRef]
- Haque, M.A.; Jahiruddin, M.; Clarke, D. Effect of plastic mulch on crop yield and land degradation in south coastal saline soils of Bangladesh. Int. Soil Water Conserv. Res. 2018, 6, 317–324. [Google Scholar] [CrossRef]
- Mahadeen, A.Y. Effect of Polyethylene Black Plastic Mulch on Growth and Yield of Two Summer Vegetable Crops Under Rainfed Conditions Under Semi-arid Region Conditions. Am. J. Agric. Biol. Sci. 2014, 9, 202–207. [Google Scholar] [CrossRef]
- Iwuagwu, C.C.; Okeke, D.O.; Onejeme, F.C.; Iheaturu, D.E.; Nwogbaga, A.C.; Salaudeen, M.T. Effect of Plant Spacing on Yield and Disease Assessment on Two Varieties of Eggplant (Solanum melongena L.) in Awka. East. African. Scholars. J. Agric. Life Sci. 2019, 2, 281–288. [Google Scholar]
- Boomsma, C.R.; Vyn, T.J. Plant-to-Plant Uniformity Is Essential for Optimum Yield in No-Till Continuous Corn Department of Agronomy. Available online: https://www.agry.purdue.edu (accessed on 25 January 2022).
- Wang, Z.; Ma, B.; Gao, J.; Sun, J. Effects of different management systems on root distribution of maize. Can. J. Plant Sci. 2015, 95, 21–28. [Google Scholar] [CrossRef]
- Grant, A.; Wolff, B.; Murray, C.; Snyder, K. The Effects of Plastic Mulch Systems on Soil Temperature and Moisture in Central Ontario. HortTechnology 2015, 25, 162–169. [Google Scholar]
- Zhang, P.; Wei, T.; Cai, T.; Ali, S.; Han, Q.F.; Ren, X.L.; Jia, Z.K. Plastic-Film Mulching for Enhanced Water-Use Efficiency and Economic Returns from Maize Fields in Semiarid China. Front. Plant Sci. 2017, 8, 512. [Google Scholar] [CrossRef]
- Lalitha, M.; Kast, V.; Thilagam, H.; Balakrishnan, N.; Mansour, M. Effect of Plastic Mulch on Soil Properties and Crop Growth. Agric. Rev. 2010, 31, 145–149. [Google Scholar]
- Diaz-Perez, J.C.; Eaton, T.E. Eggplant (Solanum melongena L.) Plant Growth and Fruit Yield as Affected by Drip Irrigation Rate. HortScience 2015, 50, 1709–1714. [Google Scholar] [CrossRef]
- Ustroyev, A.A.; Murzaev, E.A. Influence of crops of the cover crop when forming the ridge surface of landings of potatoes to dynamics of parameters of the soil state. E3S Web Conf. 2021, 262, 01038. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).