

Long-Range Navigation in Complex and Dynamic Environments with Full-Stack S-DOVS †

Abstract
:1. Introduction
- Modification of a state-of-the-art local motion planner used in dynamic environments (S-DOVS) to improve it and enable it to work in real-world scenarios.
- A novel intermediate waypoint trajectory generator designed to be used with motion planners in dynamic environments to enhance their capabilities and enable long-range navigation.
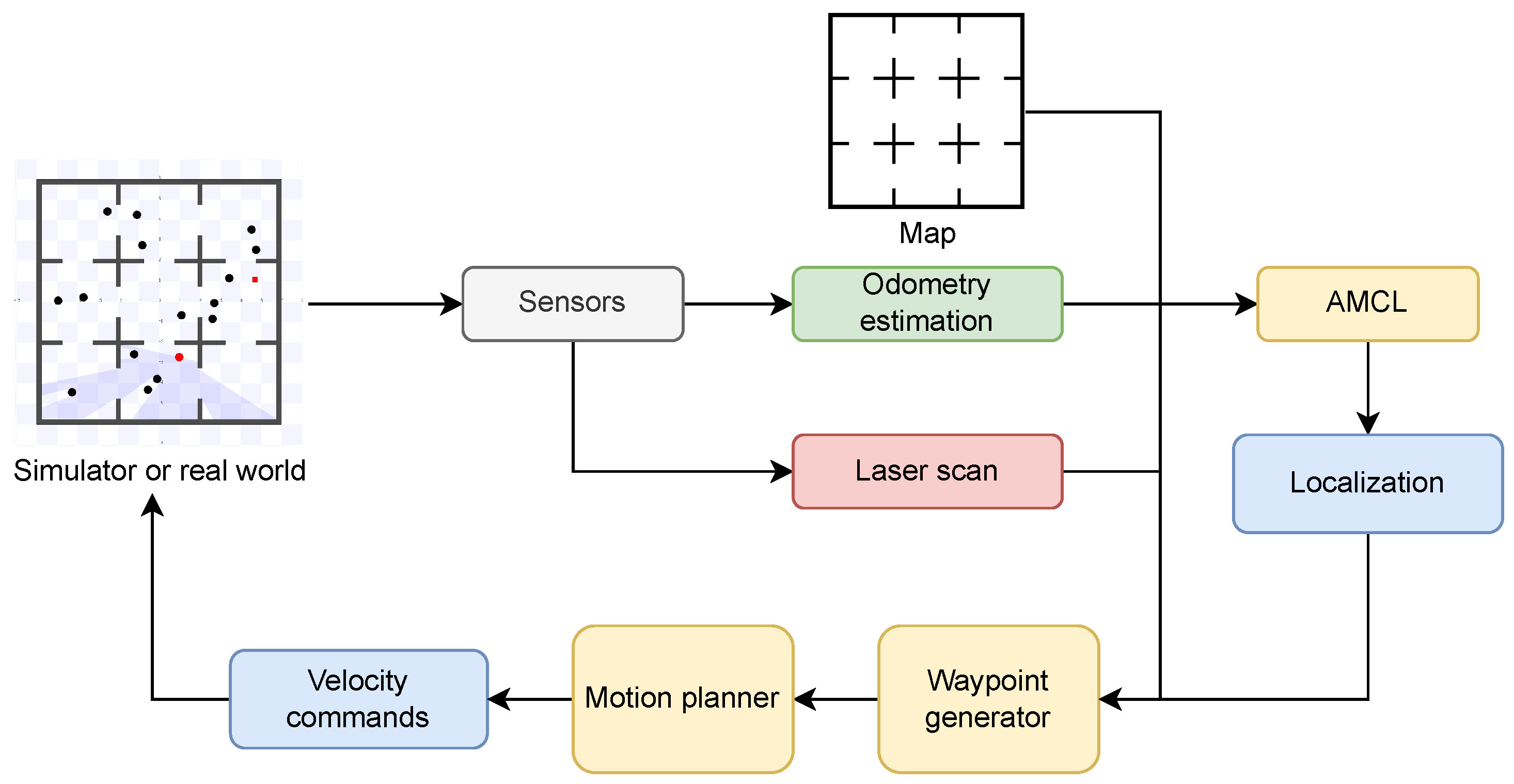
- Adaptation of an existing obstacle tracker for use with S-DOVS, along with a new waypoint generator, a localization system, and an ROS adaptation of all of the components into a full navigation stack.
- Extensive qualitative and quantitative navigation results that show the system’s performance in both simulated and real situations.
2. Background
2.1. Related Work
2.2. Dynamic Object Velocity Space (DOVS)
3. Approach
3.1. Navigation Stack
3.2. Obstacle Tracker and S-DOVS Adaptations
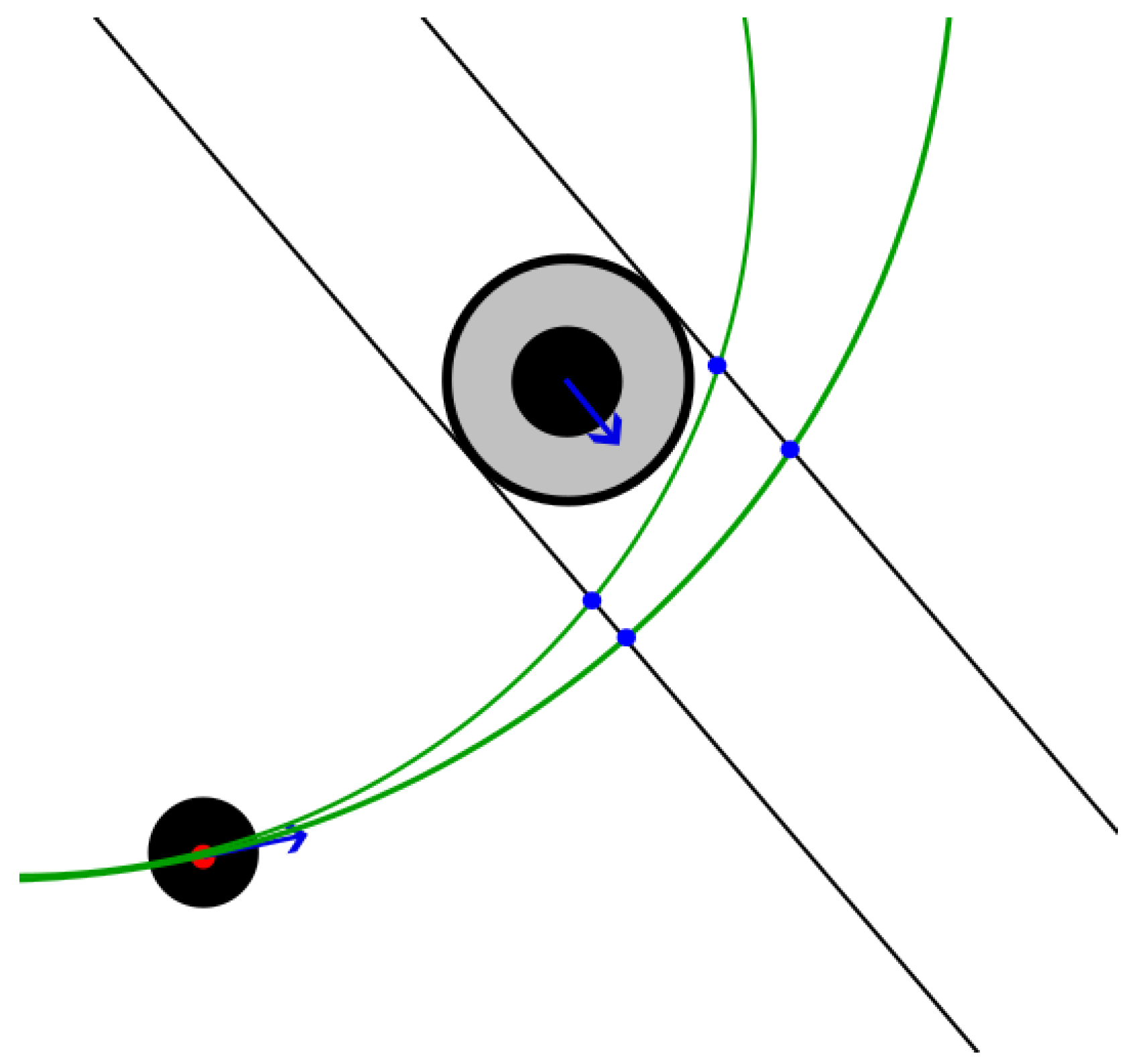
3.3. Trajectory Waypoint Generator
| Algorithm 1: Waypoint generator |
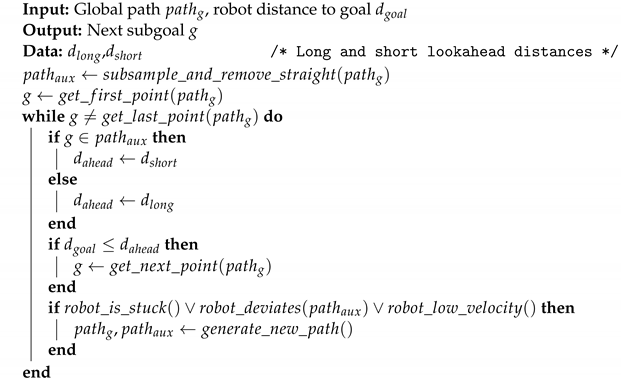 |
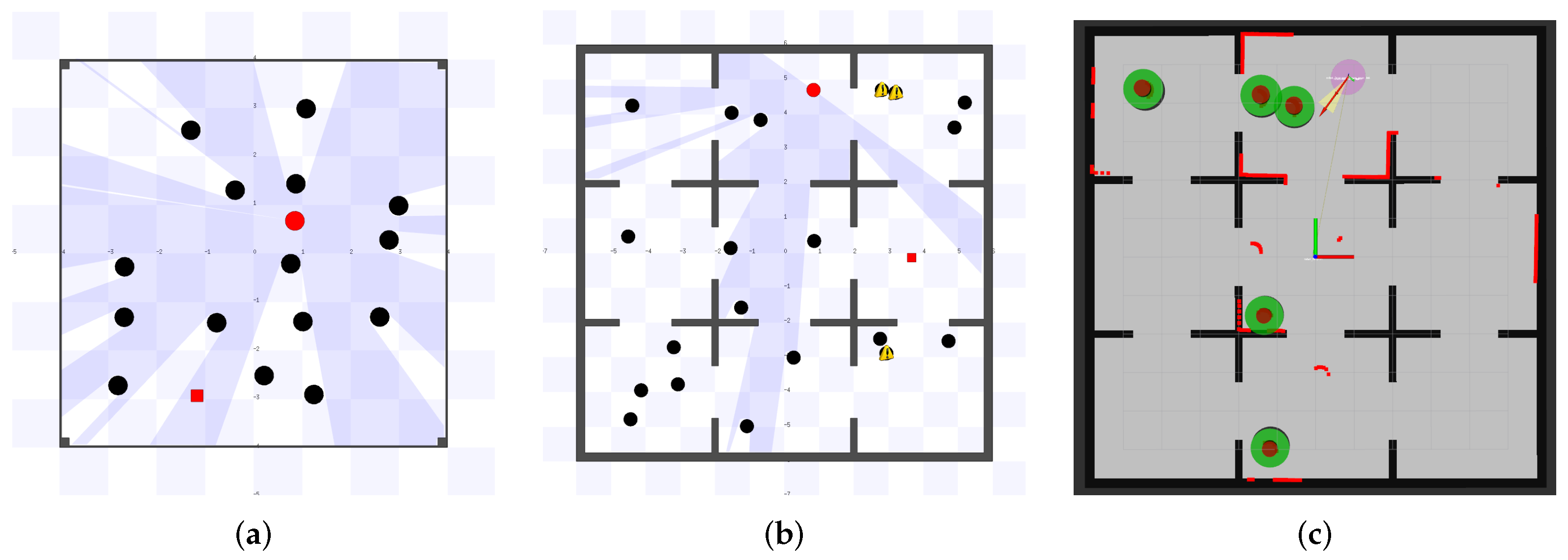
4. Experiments and Discussion
4.1. Quantitative Experiments
4.2. Qualitative Experiments
5. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Lorente, M.T.; Owen, E.; Montano, L. Model-based robocentric planning and navigation for dynamic environments. Int. J. Robot. Res. 2018, 37, 867–889. [Google Scholar] [CrossRef]
- Martínez, D.; Riazuelo, L.; Montano, L. Full-stack S-DOVS: Autonomous Navigation in Complete Real-World Dynamic Scenarios. In Proceedings of the ROBOT2022: Fifth Iberian Robotics Conference: Advances in Robotics, Zaragoza, Spain, 23–25 November 2022; Volume 2, pp. 14–25. [Google Scholar]
- LaValle, S.M.; Kuffner, J.J., Jr. Randomized kinodynamic planning. Int. J. Robot. Res. 2001, 20, 378–400. [Google Scholar] [CrossRef]
- Hart, P.E.; Nilsson, N.J.; Raphael, B. A formal basis for the heuristic determination of minimum cost paths. IEEE Trans. Syst. Sci. Cybern. 1968, 4, 100–107. [Google Scholar] [CrossRef]
- Noreen, I.; Khan, A.; Habib, Z. Optimal path planning using RRT* based approaches: A survey and future directions. Int. J. Adv. Comput. Sci. Appl. 2016, 7, 97–107. [Google Scholar] [CrossRef] [Green Version]
- Fareh, R.; Baziyad, M.; Rahman, M.H.; Rabie, T.; Bettayeb, M. Investigating reduced path planning strategy for differential wheeled mobile robot. Robotica 2020, 38, 235–255. [Google Scholar] [CrossRef]
- Fox, D.; Burgard, W.; Thrun, S. The dynamic window approach to collision avoidance. IEEE Robot. Autom. Mag. 1997, 4, 23–33. [Google Scholar] [CrossRef] [Green Version]
- Brock, O.; Khatib, O. High-speed navigation using the global dynamic window approach. In Proceedings of the 1999 IEEE International Conference on Robotics and Automation (Cat. No. 99CH36288C), Detroit, MI, USA, 10–15 May 1999; Volume 1, pp. 341–346. [Google Scholar]
- Warren, C.W. Global path planning using artificial potential fields. In Proceedings of the 1989 IEEE International Conference on Robotics and Automation, Scottsdale, AZ, USA, 14–19 May 1989; pp. 316–317. [Google Scholar]
- Quinlan, S.; Khatib, O. Elastic bands: Connecting path planning and control. In Proceedings of the 1993 IEEE International Conference on Robotics and Automation, Atlanta, GA, USA, 2–6 May 1993; pp. 802–807. [Google Scholar]
- Stachniss, C.; Burgard, W. An integrated approach to goal-directed obstacle avoidance under dynamic constraints for dynamic environments. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, Lausanne, Switzerland, 30 September–4 October 2002; Volume 1, pp. 508–513. [Google Scholar]
- Minguez, J.; Montano, L. Sensor-based robot motion generation in unknown, dynamic and troublesome scenarios. Robot. Auton. Syst. 2005, 52, 290–311. [Google Scholar] [CrossRef] [Green Version]
- Hsu, D.; Kindel, R.; Latombe, J.C.; Rock, S. Randomized kinodynamic motion planning with moving obstacles. Int. J. Robot. Res. 2002, 21, 233–255. [Google Scholar] [CrossRef] [Green Version]
- Missura, M.; Bennewitz, M. Predictive collision avoidance for the dynamic window approach. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 8620–8626. [Google Scholar]
- Dobrevski, M.; Skočaj, D. Adaptive dynamic window approach for local navigation. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2020; pp. 6930–6936. [Google Scholar]
- Rösmann, C.; Hoffmann, F.; Bertram, T. Integrated online trajectory planning and optimization in distinctive topologies. Robot. Auton. Syst. 2017, 88, 142–153. [Google Scholar] [CrossRef]
- Fraichard, T.; Asama, H. Inevitable collision states—A step towards safer robots? Adv. Robot. 2004, 18, 1001–1024. [Google Scholar] [CrossRef] [Green Version]
- Fiorini, P.; Shiller, Z. Motion planning in dynamic environments using velocity obstacles. Int. J. Robot. Res. 1998, 17, 760–772. [Google Scholar] [CrossRef]
- Shi, H.; Shi, L.; Xu, M.; Hwang, K.S. End-to-End Navigation Strategy with Deep Reinforcement Learning for Mobile Robots. IEEE Trans. Ind. Inform. 2020, 16, 2393–2402. [Google Scholar] [CrossRef]
- Lei, X.; Zhang, Z.; Dong, P. Dynamic path planning of unknown environment based on deep reinforcement learning. J. Robot. 2018, 2018, 5781591. [Google Scholar]
- Chen, C.; Liu, Y.; Kreiss, S.; Alahi, A. Crowd-robot interaction: Crowd-aware robot navigation with attention-based deep reinforcement learning. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; pp. 6015–6022. [Google Scholar]
- Mackay, A.K.; Riazuelo, L.; Montano, L. RL-DOVS: Reinforcement Learning for Autonomous Robot Navigation in Dynamic Environments. Sensors 2022, 22, 3847. [Google Scholar] [CrossRef] [PubMed]
- Martinez, D.; Riazuelo, L.; Montano, L. Deep reinforcement learning oriented for real world dynamic scenarios. arXiv 2022, arXiv:2210.11392. [Google Scholar]
- Ibarz, J.; Tan, J.; Finn, C.; Kalakrishnan, M.; Pastor, P.; Levine, S. How to train your robot with deep reinforcement learning: Lessons we have learned. Int. J. Robot. Res. 2021, 40, 698–721. [Google Scholar]
- Dulac-Arnold, G.; Levine, N.; Mankowitz, D.J.; Li, J.; Paduraru, C.; Gowal, S.; Hester, T. Challenges of real-world reinforcement learning: Definitions, benchmarks and analysis. Mach. Learn. 2021, 110, 2419–2468. [Google Scholar] [CrossRef]
- Guldenring, R.; Görner, M.; Hendrich, N.; Jacobsen, N.J.; Zhang, J. Learning local planners for human-aware navigation in indoor environments. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October–24 January 2020; pp. 6053–6060. [Google Scholar]
- Kästner, L.; Buiyan, T.; Jiao, L.; Le, T.A.; Zhao, X.; Shen, Z.; Lambrecht, J. Arena-Rosnav: Towards deployment of deep-reinforcement-learning-based obstacle avoidance into conventional autonomous navigation systems. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 6456–6463. [Google Scholar]
- Kästner, L.; Bhuiyan, T.; Le, T.A.; Treis, E.; Cox, J.; Meinardus, B.; Kmiecik, J.; Carstens, R.; Pichel, D.; Fatloun, B.; et al. Arena-bench: A benchmarking suite for obstacle avoidance approaches in highly dynamic environments. IEEE Robot. Autom. Lett. 2022, 7, 9477–9484. [Google Scholar] [CrossRef]
- Gerkey, B.; Vaughan, R.T.; Howard, A. The player/stage project: Tools for multi-robot and distributed sensor systems. In Proceedings of the 11th International Conference on Advanced Robotics, Coimbra, Portugal, 30 June–3 July 2003; Volume 1, pp. 317–323. [Google Scholar]
- Fox, D. KLD-sampling: Adaptive particle filters and mobile robot localization. Adv. Neural Inf. Process. Syst. (NIPS) 2001, 14, 26–32. [Google Scholar]
- Przybyła, M. Detection and tracking of 2D geometric obstacles from LRF data. In Proceedings of the 2017 11th International Workshop on Robot Motion and Control (RoMoCo), Wasowo Palace, Poland, 3–5 July 2017; pp. 135–141. [Google Scholar]
- Grisetti, G.; Stachniss, C.; Burgard, W. Improved techniques for grid mapping with rao-blackwellized particle filters. IEEE Trans. Robot. 2007, 23, 34–46. [Google Scholar] [CrossRef] [Green Version]
- Khan, A.H.; Li, S.; Luo, X. Obstacle avoidance and tracking control of redundant robotic manipulator: An RNN-based metaheuristic approach. IEEE Trans. Ind. Inform. 2019, 16, 4670–4680. [Google Scholar] [CrossRef] [Green Version]
- Wu, Q.; Shen, X.; Jin, Y.; Chen, Z.; Li, S.; Khan, A.H.; Chen, D. Intelligent beetle antennae search for UAV sensing and avoidance of obstacles. Sensors 2019, 19, 1758. [Google Scholar] [CrossRef] [PubMed] [Green Version]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Map | Metric | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | 10 | 11 | 12 | 13 | 14 | 15 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Single | Success | 1.02 | 1.12 | 0.99 | 1.05 | 1.02 | 1.19 | 1.19 | 1.02 | 1.16 | 1.06 | 1.23 | 1.06 | 1.06 | 1.29 | 1.39 |
| Time | 1.02 | 1.01 | 0.97 | 0.99 | 0.98 | 1.09 | 1.05 | 1.00 | 1.06 | 1.08 | 0.93 | 1.03 | 0.89 | 1.06 | 1.11 | |
| Multi | Success | 3.09 | 2.89 | 3.41 | 2.84 | 3.09 | 4.16 | 4.11 | 3.08 | 3.67 | 3.21 | 3.73 | 2.86 | 3.93 | 3.52 | 3.53 |
| Time | 1.09 | 1.32 | 1.11 | 1.07 | 1.21 | 1.08 | 1.13 | 1.07 | 0.95 | 1.11 | 1.25 | 1.24 | 1.10 | 1.10 | 1.11 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Martinez-Baselga, D.; Riazuelo, L.; Montano, L. Long-Range Navigation in Complex and Dynamic Environments with Full-Stack S-DOVS. Appl. Sci. 2023, 13, 8925. https://doi.org/10.3390/app13158925
Martinez-Baselga D, Riazuelo L, Montano L. Long-Range Navigation in Complex and Dynamic Environments with Full-Stack S-DOVS. Applied Sciences. 2023; 13(15):8925. https://doi.org/10.3390/app13158925
Chicago/Turabian StyleMartinez-Baselga, Diego, Luis Riazuelo, and Luis Montano. 2023. "Long-Range Navigation in Complex and Dynamic Environments with Full-Stack S-DOVS" Applied Sciences 13, no. 15: 8925. https://doi.org/10.3390/app13158925
APA StyleMartinez-Baselga, D., Riazuelo, L., & Montano, L. (2023). Long-Range Navigation in Complex and Dynamic Environments with Full-Stack S-DOVS. Applied Sciences, 13(15), 8925. https://doi.org/10.3390/app13158925