
Comparative Analysis of Hybrid-Electric Regional Aircraft with Tube-and-Wing and Box-Wing Airframes: A Performance Study



Abstract
1. Introduction
2. Methodology
2.1. Overview of Aircraft Design Framework
2.2. Aerodynamic Assessment
2.3. Weight Breakdown Evaluation
2.4. Architectural Assumptions and Design Requirements
3. Performance Comparison
3.1. Block Fuel Comparison
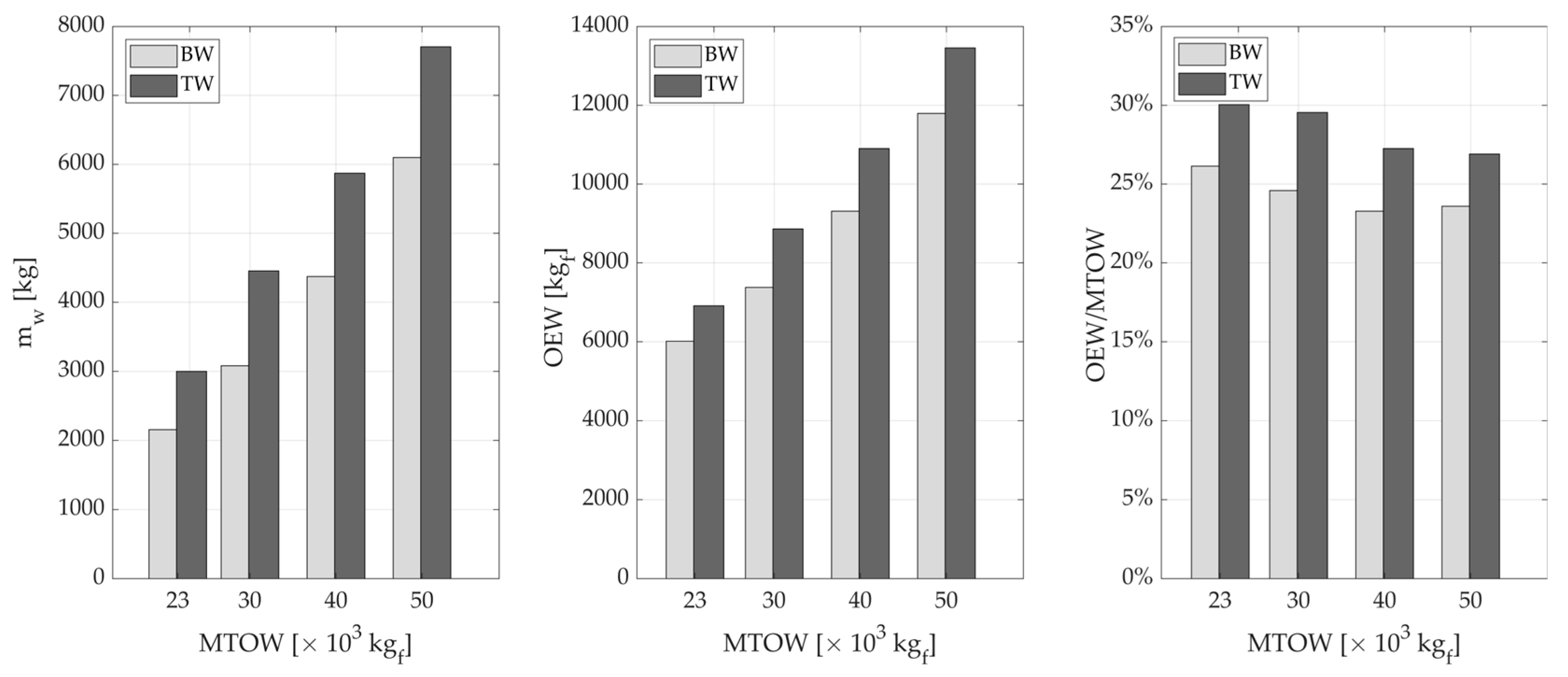
3.1.1. Lifting System Structural Mass
3.1.2. Lift-to-Drag Ratio
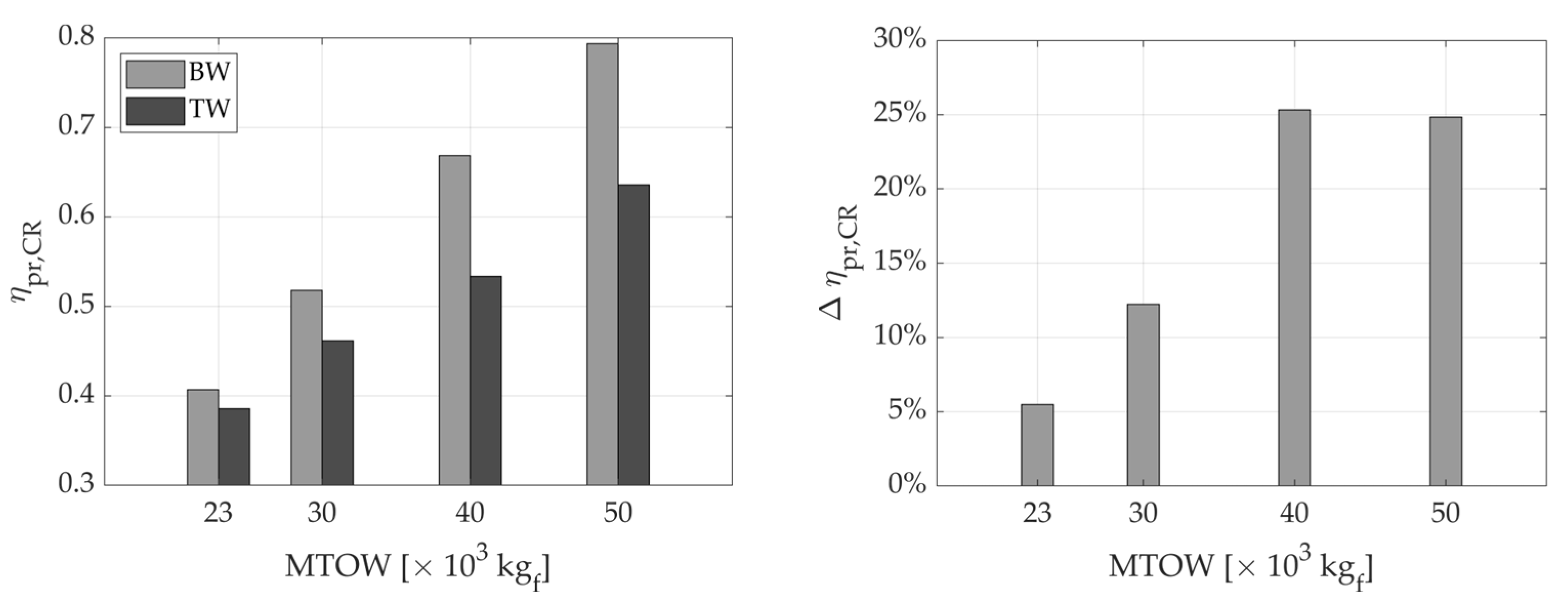
3.1.3. Powertrain Efficiency
4. Hybrid-Electric Aircraft Design Optimization
4.1. Optimization Framework
4.2. Results of the Optimization
- If the hybrid-electric propulsion is exploited to cut block fuel as much as possible, hence increasing MTOW, the BW configuration is compatible with the aprons of category ‘C’; this category is the most widespread in the airport infrastructure [66]. The competitor hybrid-electric TW is not able to fulfill the constraint of category ‘C’; it is compatible with category ‘D’, which is usually devoted to aircraft that transport a high number of passengers a long distance, hence limiting the integration of this configuration in the regional aviation market.
- If the hybrid-electric propulsion is exploited to mitigate the fuel consumption without exceeding the current weight reference of regional aircraft, BW is compatible with the aprons belonging to category ‘B’, while the TW hybrid-electric aircraft wingspan is not compatible with ICAO ‘B’.
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
List of Symbols and Acronyms
| List of Symbols | Description | Unit |
| b | Wingspan | m |
| c | Airfoil chord | m |
| Cd | Airfoil drag coefficient | |
| Csf | Safety factor | |
| Dind | Induced drag | kgf |
| Dp | Parasitic drag | kgf |
| Efly | Energy to accomplish the mission | J |
| El | Energy lost in the propulsion system | J |
| Ep | Energy supplied to propeller | J |
| Es | Energy supplied by the source of energy | J |
| Fz | Vertical net force on lifting system | kgf |
| g | Standard gravity | m/s2 |
| HP | Degree of hybridization | |
| hw | Vertical gap between front and rear wing | m |
| L | Lift | kgf |
| L/D | Lift-to-drag ratio | |
| lb | Upper bound vector | |
| mb | Battery mass | kg |
| mf | Fuel mass | kg |
| mfb | Block fuel mass | kg |
| mfd | Diversion fuel mass | kg |
| mop | Operating mass | kg |
| mpr | Propulsion system mass | kg |
| mst | Structural mass | kg |
| msy | Onboard systems mass | kg |
| mw | Wing mass | kg |
| Tip wing mass | kg | |
| Forward wing mass | kg | |
| Rear wing mass | kg | |
| nz | Vertical load factor | |
| P/W | Specific power | W/kgf |
| Electric motor installed power | W | |
| Thermal engine installed power | W | |
| Pt | Supplied thermal power | W |
| q | Dynamic pressure | Pa |
| u | Wing tip vertical displacement | m |
| ub | Lower bound vector | |
| V | Airspeed | m/s |
| v12 | Mutual wing interaction parameter | |
| W | Aircraft weight | kgf |
| W/S | Wing loading | kgf/m2 |
| ηec | Efficiency electric chain | |
| ηpr | Propulsion system efficiency | |
| ηtc | Efficiency thermal chain | |
| ρ | Air density | kg/m3 |
| σF | Maximum stress on forward wing | MPa |
| σR | Maximum stress on rear wing | MPa |
| σYs | Yielding stress of Al2024 | MPa |
| Φe | Power fraction supplied by the electric motor | |
| Φt | Power fraction supplied by the thermal engine | |
| List of Acronyms | Description | Unit |
| BED | Gravimetric battery energy density | Wh/kg |
| BW | Box-wing | |
| FED | Gravimetric fuel energy density | Wh/kg |
| FoM | Figure of merit | |
| MTOW | Maximum take-off weight | kgf |
| OEW | Operative empty weight | kgf |
| TW | Tube and wing |
References
- Hosseini, S.; Vaziri-Zanjani, M.A.; Ovesy, H.R. Conceptual design and analysis of an affordable truss-braced wing regional jet aircraft. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020; in press. [Google Scholar] [CrossRef]
- Harrison, N.A.; Gatlin, G.M.; Viken, S.A.; Beyar, M.; Dickey, E.D.; Hoffman, K.; Reichenbach, E.Y. Development of an Efficient M = 0.80 Transonic Truss-Braced Wing Aircraft. In Proceedings of the AIAA Scitech Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Karpuk, S.; Liu, Y.; Elham, A. Multi-Fidelity Design Optimization of a Long-Range Blended Wing Body Aircraft with New Airframe Technologies. Aerospace 2020, 7, 87. [Google Scholar] [CrossRef]
- Chen, Z.; Zhang, M.; Chen, Y.; Sang, W.; Tan, Z.; Li, D.; Zhang, B. Assessment on critical technologies for conceptual design of blended-wing-body civil aircraft. Chin. J. Aeronaut. 2019, 32, 1797–1827. [Google Scholar] [CrossRef]
- Okonkwo, P.; Smith, H. Review of evolving trends in blended wing body aircraft design. Prog. Aerosp. Sci. 2016, 82, 1–23. [Google Scholar] [CrossRef]
- Zhu, W.; Fan, Z.; Yu, X. Structural mass prediction in conceptual design of blended-wing-body aircraft. Chin. J. Aeronaut. 2019, 32, 2455–2465. [Google Scholar] [CrossRef]
- Abu Salem, K.; Cipolla, V.; Palaia, G.; Binante, V.; Zanetti, D. A Physics-Based Multidisciplinary Approach for the Preliminary Design and Performance Analysis of a Medium Range Aircraft with Box-Wing Architecture. Aerospace 2021, 8, 292. [Google Scholar] [CrossRef]
- Bravo-Mosquera, P.D.; Cerón-Muñoz, H.D.; Catalano, F.M. Design, aerodynamic analysis and optimization of a next-generation commercial airliner. J. Braz. Soc. Mech. Sci. Eng. 2022, 44, 609. [Google Scholar] [CrossRef]
- Andrews, S.A.; Perez, R.E. Comparison of box-wing and conventional aircraft mission performance using multidisciplinary analysis and optimization. Aerosp. Sci. Technol. 2018, 79, 336–351. [Google Scholar] [CrossRef]
- Gagnon, H.; Zingg, D.W. Aerodynamic Optimization Trade Study of a Box-Wing Aircraft Configuration. J. Aircr. 2016, 53, 971–981. [Google Scholar] [CrossRef]
- Brelje, B.J.; Martins, J.R. Electric, hybrid, and turboelectric fixed-wing aircraft: A review of concepts, models, and design approaches. Prog. Aerosp. Sci. 2018, 104, 1–19. [Google Scholar] [CrossRef]
- Pornet, C.; Isikveren, A. Conceptual design of hybrid-electric transport aircraft. Prog. Aerosp. Sci. 2015, 79, 114–135. [Google Scholar] [CrossRef]
- Marciello, V.; Orefice, F.; Nicolosi, F.; Ciliberti, D.; Della Vecchia, P. Design of hybrid-electric aircraft with fault-tolerance considerations. Chin. J. Aeronaut. 2023, 36, 160–178. [Google Scholar] [CrossRef]
- Khandelwal, B.; Karakurt, A.; Sekaran, P.R.; Sethi, V.; Singh, R. Hydrogen powered aircraft: The future of air transport. Prog. Aerosp. Sci. 2013, 60, 45–59. [Google Scholar] [CrossRef]
- Baroutaji, A.; Wilberforce, T.; Ramadan, M.; Olabi, A.G. Comprehensive investigation on hydrogen and fuel cell technology in the aviation and aerospace sectors. Renew. Sustain. Energy Rev. 2019, 106, 31–40. [Google Scholar] [CrossRef]
- Cavallaro, R.; Demasi, L. Challenges, Ideas, and Innovations of Joined-Wing Configurations: A Concept from the Past, an Opportunity for the Future. Prog. Aerosp. Sci. 2016, 87, 1–93. [Google Scholar] [CrossRef]
- Bravo-Mosquera, P.D.; Catalano, F.M.; Zingg, D.W. Unconventional aircraft for civil aviation: A review of concepts and design methodologies. Prog. Aerosp. Sci. 2022, 131, 100813. [Google Scholar] [CrossRef]
- Palaia, G.; Abu Salem, K. Mission Performance Analysis of Hybrid-Electric Regional Aircraft. Aerospace 2023, 10, 246. [Google Scholar] [CrossRef]
- Hoelzen, J.; Liu, Y.; Bensmann, B.; Winnefeld, C.; Elham, A.; Friedrichs, J.; Hanke-Rauschenbach, R. Conceptual Design of Operation Strategies for Hybrid Electric Aircraft. Energies 2018, 11, 217. [Google Scholar] [CrossRef]
- Sahoo, S.; Zhao, X.; Kyprianidis, K. A Review of Concepts, Benefits, and Challenges for Future Electrical Propulsion-Based Aircraft. Aerospace 2020, 7, 44. [Google Scholar] [CrossRef]
- Abu Salem, K.; Palaia, G.; Quarta, A.A. Review of hybrid-electric aircraft technologies and designs: Critical analysis and novel solutions. Prog. Aerosp. Sci. 2023, in press. [Google Scholar]
- Abu Salem, K.; Palaia, G.; Quarta, A.A.; Chiarelli, M.R. Medium-Range Aircraft Conceptual Design from a Local Air Quality and Climate Change Viewpoint. Energies 2023, 16, 4013. [Google Scholar] [CrossRef]
- Marciello, V.; Di Stasio, M.; Ruocco, M.; Trifari, V.; Nicolosi, F.; Meindl, M.; Lemoine, B.; Caliandro, P. Design Exploration for Sustainable Regional Hybrid-Electric Aircraft: A Study Based on Technology Forecasts. Aerospace 2023, 10, 165. [Google Scholar] [CrossRef]
- Verstraete, D. Long range transport aircraft using hydrogen fuel. Int. J. Hydrog. Energy 2013, 38, 14824–14831. [Google Scholar] [CrossRef]
- Clean Sky 2. Hydrogen-Powered Aviation a Fact-Based Study of Hydrogen Technology, Economics, and Climate Impact by 2050; Report, Clean Sky 2 Joint Undertaking; Clean Sky 2 Publication Office: Luxembourg, 2020. [Google Scholar] [CrossRef]
- Riboldi, C.E.; Trainelli, L.; Mariani, L.; Rolando, A.; Salucci, F. Predicting the effect of electric and hybrid-electric aviation on acoustic pollution. Noise Mapp. 2020, 7, 35–56. [Google Scholar] [CrossRef]
- Löbberding, H.; Wessel, S.; Offermanns, C.; Kehrer, M.; Rother, J.; Heimes, H.; Kampker, A. From Cell to Battery System in BEVs: Analysis of System Packing Efficiency and Cell Types. World Electr. Veh. J. 2020, 11, 77. [Google Scholar] [CrossRef]
- Xue, N.; Du, W.; Martins, J.; Shyy, W. Lithium-Ion Batteries: Thermomechanics, Performance, and Design Optimization. In Encyclopedia of Aircraft Engineering, Green Aviation; Cambridge University Press: Cambridge, UK, 2015. [Google Scholar] [CrossRef]
- Dever, T.P.; Duffy, K.P.; Provenza, A.J.; Loyselle, P.L.; Choi, B.B.; Morrison, C.R.; Lowe, A.M. Assessment of Technologies for Noncryogenic Hybrid Electric Propulsion; NASA/TP-2015-216588; National Technical Information Service: Alexandria, VA, USA, 2015. [Google Scholar]
- Zhang, H.; Li, X.; Zhang, H. Li–S and Li–O2 Batteries with High Specific Energy; Springer: Singapore, 2017; pp. 1–48. [Google Scholar] [CrossRef]
- Frediani, A.; Montanari, G. Best wing system: An exact solution of the Prandtl’s problem. In Variational Analysis and Aerospace Engineering; Springer Optimization and Its Applications; Springer: Berlin/Heidelberg, Germany, 2009; Volume 33. [Google Scholar] [CrossRef]
- Frediani, A.; Cipolla, V.; Rizzo, E. The PrandtlPlane Configuration: Overview on Possible Applications to Civil Aviation. In Variational Analysis and Aerospace Engineering: Mathematical Challenges for Aerospace Design; Springer Optimization and Its Applications; Springer: Boston, MA, USA, 2012; Volume 66. [Google Scholar] [CrossRef]
- Cipolla, V.; Abu Salem, K.; Picchi Scardaoni, M.; Binante, V. Preliminary design and performance analysis of a box-wing transport aircraft. In Proceedings of the AIAA Scitech Forum, Orlando, FL, USA, 6–10 January 2020. [Google Scholar] [CrossRef]
- Palaia, G. Design and Performance Assessment Methodologies for Box-Wing Hybrid-Electric Aircraft from Urban to Regional Transport Applications. Ph.D. Thesis, University of Pisa, Pisa, Italy, 2022. Available online: https://etd.adm.unipi.it/t/etd-11092022-150110/ (accessed on 28 May 2023).
- Palaia, G.; Zanetti, D.; Abu Salem, K.; Cipolla, V.; Binante, V. THEA-CODE: A design tool for the conceptual design of hybrid-electric aircraft with conventional or unconventional airframe configurations. Mech. Ind. 2021, 22, 19. [Google Scholar] [CrossRef]
- Fioriti, M. Adaptable conceptual aircraft design model. Adv. Aircr. Spacecr. Sci. 2014, 1, 43–67. [Google Scholar] [CrossRef]
- Sforza, P.M. Commercial Airplane Design Principles; Elsevier: Amsterdam, The Netherlands, 2014. [Google Scholar] [CrossRef]
- FAA. FAR 25, Airworthiness Standards: Transport Category Airplanes; FAA: Washington, DC, USA, 1980.
- Cappelli, L.; Costa, G.; Cipolla, V.; Frediani, A.; Oliviero, F.; Rizzo, E. Aerodynamic optimization of a large PrandtlPlane configuration. Aerotec. Missili Spaz. 2016, 95, 163–175. [Google Scholar] [CrossRef]
- Rizzo, E.; Frediani, A. Application of Optimisation Algorithms to Aircraft Aerodynamics. In Variational Analysis and Aerospace Engineering; Springer Optimization and Its Applications; Springer: New York, NY, USA, 2009; Volume 33. [Google Scholar] [CrossRef]
- Abu Salem, K.; Palaia, G.; Cipolla, V.; Binante, V.; Zanetti, D.; Chiarelli, M. Tools and methodologies for box-wing aircraft conceptual aerodynamic design and aeromechanic analysis. Mech. Ind. 2021, 22, 39. [Google Scholar] [CrossRef]
- Abu Salem, K.; Palaia, G.; Quarta, A.A.; Chiarelli, M.R. A comprehensive conceptual analysis of the stability and controllability of box-wing aircraft. Aerosp. Sci. Technol. 2023. under review. [Google Scholar]
- Drela, M.; Youngren, H. AVL 3.36 User Primer, Online Software Manual. 2017. Available online: https://perma.cc/R35R-W29F (accessed on 28 May 2023).
- Cipolla, V.; Abu Salem, K.; Bachi, F. Preliminary stability analysis methods for PrandtlPlane aircraft in subsonic conditions. Aircr. Eng. Aerosp. Technol. 2019, 91, 525–537. [Google Scholar] [CrossRef]
- Zanetti, D. Studio Preliminare Della Dinamica Libera e Delle Qualità di Volo Della Configurazione PrandtlPlane, (Transl. “Pre-liminary Study of the Flight Dynamics and Handling Qualities of the PrandtlPlane Configuration”). Master’s Thesis, University of Pisa, Pisa, Italy, 2014. Available online: https://etd.adm.unipi.it/theses/available/etd-09172014-114441/ (accessed on 28 May 2023).
- Raymer, P. Aircraft Design: A Conceptual Approach; AIAA Education Series: Washington, DC, USA, 1992; ISBN 0-930403-51-7. [Google Scholar]
- Drela, M.; Youngren, H. XFOIL 6.9 User Primer, Online Software Manual. 2001. Available online: https://web.mit.edu/drela/Public/web/xfoil/ (accessed on 28 May 2023).
- Wells, D.P.; Horvath, B.L.; McCullers, L.A. The Flight Optimization System Weights Estimation Method. NASA Technical Reports. 2017. Available online: https://ntrs.nasa.gov/citations/20170005851 (accessed on 28 May 2023).
- Bolam, R.C.; Vagapov, Y.; Anuchin, A. A review of electrical motor topologies for aircraft propulsion. In Proceedings of the 55th International Universities Power Engineering Conference (UPEC), Torino, Italy, 1–4 September 2020; pp. 1–6. [Google Scholar]
- Alvarez, P.; Satrustegui, M.; Elosegui, I.; Martinez-Iturralde, M. Review of High Power and High Voltage Electric Motors for Single-Aisle Regional Aircraft. IEEE Access 2022, 10, 112989–113004. [Google Scholar] [CrossRef]
- Wang, G.G.; Shan, S. Review of Metamodeling Techniques in Support of Engineering Design Optimization. J. Mech. Des. 2006, 129, 370–380. [Google Scholar] [CrossRef]
- Simpson, T.W.; Poplinski, J.D.; Koch, P.N.; Allen, J.K. Metamodels for Computer-based Engineering Design: Survey and recommendations. Eng. Comput. 2001, 17, 129–150. [Google Scholar] [CrossRef]
- Cipolla, V.; Abu Salem, K.; Palaia, G.; Binante, V.; Zanetti, D. A DoE-based approach for the implementation of structural surrogate models in the early stage design of box-wing aircraft. Aerosp. Sci. Technol. 2021, 117, 106968. [Google Scholar] [CrossRef]
- Palaia, G.; Abu Salem, K.; Cipolla, V.; Zanetti, D.; Binante, V. A DoE-based scalable approach for the preliminary structural design of Box-Wing aircraft from regional to medium range categories. In Proceedings of the AIAA SciTech 2023 Forum, National Harbor, MD, USA, 23–27 January 2023. [Google Scholar] [CrossRef]
- Dassault Systèmes Simulia Corp. ABAQUS User Manual, v 6.14; Dassault Systèmes Simulia Corp: Johnston, RI, USA, 2014. [Google Scholar]
- Scardaoni, M.P.; Binante, V.; Cipolla, V. WAGNER: A new code for parametrical structural study of fuselages of civil transport aircraft. Aerotec. Missili Spaz. 2017, 96, 136–147. [Google Scholar] [CrossRef]
- Torenbeek, E. Development and Application of a Comprehensive, Design Sensitive Weight Prediction Method for Wing Structures of Transport Category Aircraft; Report LR-693; Delft University of Technology, Faculty of Aerospace Engineering: Delft, The Netherlands, 1992. [Google Scholar]
- Beltramo, M.N.; Trapp, D.L.; Kimoto, B.W.; Marsh, D.P. Parametric Study of Transport Aircraft Systems Cost and Weight; NASA-CR-151970; NASA: Greenbelt, MD, USA, 1977.
- ATR. ATR 42-600 Aircraft. Available online: https://www.atr-aircraft.com/our-aircraft/atr-42-600/ (accessed on 28 May 2023).
- Eisenhut, D.; Moebs, N.; Windels, E.; Bergmann, D.; Geiß, I.; Reis, R.; Strohmayer, A. Aircraft Requirements for Sustainable Regional Aviation. Aerospace 2021, 8, 61. [Google Scholar] [CrossRef]
- ICAO. Annex 14, Aerodromes: Volume I—Aerodrome Design and Operations. In International Standards and Recommended Practices; Technical Reports AN14-1; International Civil Aviation Organization: Montreal, QC, Canada, 2022. [Google Scholar]
- ATR. Connecting the Future. Turboprop Market Forecast 2018–2037. Available online: http://www.atr-aicraft.com/wp-content/uploads/2020/09/2018-MarketForecast_Digital.pdf (accessed on 28 May 2023).
- Abu Salem, K. Development of Design Tools and Methods for Box-Wing Airplanes and Application of the PrandtlPlane Concept to a Short-Medium Range Aircraft. Ph.D. Thesis, University of Pisa, Pisa, Italy, 2021. Available online: https://etd.adm.unipi.it/theses/available/etd-05312021-171241/ (accessed on 28 May 2023).
- Fletcher, R. Practical Methods of Optimization; John Wiley & Sons: Hoboken, NJ, USA, 2013; ISBN 978-1-118-72318-0. [Google Scholar]
- Martins, J.R.; Ning, A. Engineering Design Optimization; Cambridge University Press: Cambridge, UK, 2021; ISBN 978-1108833417. [Google Scholar]
- Bishop, K. Assessment of the Ability of Existing Airport Gate Infrastructure to Accommodate Transport Category Aircraft with Increased Wingspan for Improved Fuel Efficiency. Master’s Thesis, Department of Aeronautics and Astronautics, Massachusetts Institute of Technology, Boston, MA, USA, 2012. Available online: http://hdl.handle.net/1721.1/76095 (accessed on 28 May 2023).























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 | Reference Thermal Powered TW | |
| Wingspan | 24 m | |
| Length | 21.9 m | |
| Wing surface | 49.2 m2 | |
| Tail surface | 6.9 m2 | |
| MTOW | 16,020 kgf | |
| OEW | 10,702 kgf | |
| Payload | 40 × 95 kgf | |
| Total fuel @ 600 nm | 1479 kgf | |
| Block fuel @ 600 nm | 1155 kgf | |
| ICE power | 2 × 2167 kW | |
| Design Parameter | Range Value |
|---|---|
| HP | [0.1, 0.2, 0.3, 0.4, 0.5] |
| W/S [kgf/m2] | [255, 265, 275, 285, 295, 305, 315, 325] |
| [0.35, 0.40, 0.45, 0.50, 0.55] | |
| [0.35, 0.40, 0.45, 0.50, 0.55] |
| Electric Component | Specific Power/Energy | Efficiency |
|---|---|---|
| Battery | 500 Wh/kg | 0.96 |
| Electric motor | 13 kW/kg | 0.96 |
| Inverter | 19 kW/kg | 0.98 |
| Wire | 352 kWm/kg | 0.99 |
| Design Variables | Constraint | Obj. | ||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| (W/g)/S [kgf/m2] | HP | MTOWMAX [kg] | mfb [kg] | Δ% mfb | ||||||||||||
| Tag | BW | TW | BW | TW | BW | TW | BW | TW | BW | TW | BW | TW | BW | TW | BW | TW |
| 23t | 320 | 325 | 0.38 | 0.27 | 0.23 | 0.33 | 0.35 | 0.33 | 0.17 | 0.22 | 22,976 | 22,962 | 705 | 907 | −39 | −21 |
| 30t | 314 | 305 | 0.40 | 0.39 | 0.15 | 0.29 | 0.21 | 0.30 | 0.16 | 0.30 | 30,117 | 30,000 | 523 | 816 | −55 | −29 |
| 40t | 311 | 325 | 0.59 | 0.45 | 0.19 | 0.11 | 0.13 | 0.20 | 0.15 | 0.13 | 40,132 | 39,913 | 320 | 631 | −72 | −45 |
| 50t | 309 | 325 | 0.46 | 0.40 | 0.11 | 0.13 | 0.01 | 0.10 | 0.10 | 0.11 | 50,160 | 50,019 | 113 | 525 | −90 | −55 |
| Architecture | MTOW [tons] | Span [m] | ICAO ‘B’ ≤ 24 m | ICAO ‘C’ ≤ 36 m |
|---|---|---|---|---|
| BW | 23 | 23.8 | ✔ | ✔ |
| 30 | 27.8 | 🗶 | ✔ | |
| 40 | 29.9 | 🗶 | ✔ | |
| 50 | 35.4 | 🗶 | ✔ | |
| TW | 23 | 28.8 | 🗶 | ✔ |
| 30 | 32.8 | 🗶 | ✔ | |
| 40 | 38.0 | 🗶 | 🗶 | |
| 50 | 42.4 | 🗶 | 🗶 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Palaia, G.; Abu Salem, K.; Quarta, A.A. Comparative Analysis of Hybrid-Electric Regional Aircraft with Tube-and-Wing and Box-Wing Airframes: A Performance Study. Appl. Sci. 2023, 13, 7894. https://doi.org/10.3390/app13137894
Palaia G, Abu Salem K, Quarta AA. Comparative Analysis of Hybrid-Electric Regional Aircraft with Tube-and-Wing and Box-Wing Airframes: A Performance Study. Applied Sciences. 2023; 13(13):7894. https://doi.org/10.3390/app13137894
Chicago/Turabian StylePalaia, Giuseppe, Karim Abu Salem, and Alessandro A. Quarta. 2023. "Comparative Analysis of Hybrid-Electric Regional Aircraft with Tube-and-Wing and Box-Wing Airframes: A Performance Study" Applied Sciences 13, no. 13: 7894. https://doi.org/10.3390/app13137894
APA StylePalaia, G., Abu Salem, K., & Quarta, A. A. (2023). Comparative Analysis of Hybrid-Electric Regional Aircraft with Tube-and-Wing and Box-Wing Airframes: A Performance Study. Applied Sciences, 13(13), 7894. https://doi.org/10.3390/app13137894