2.1. Assisted Driving Control Model
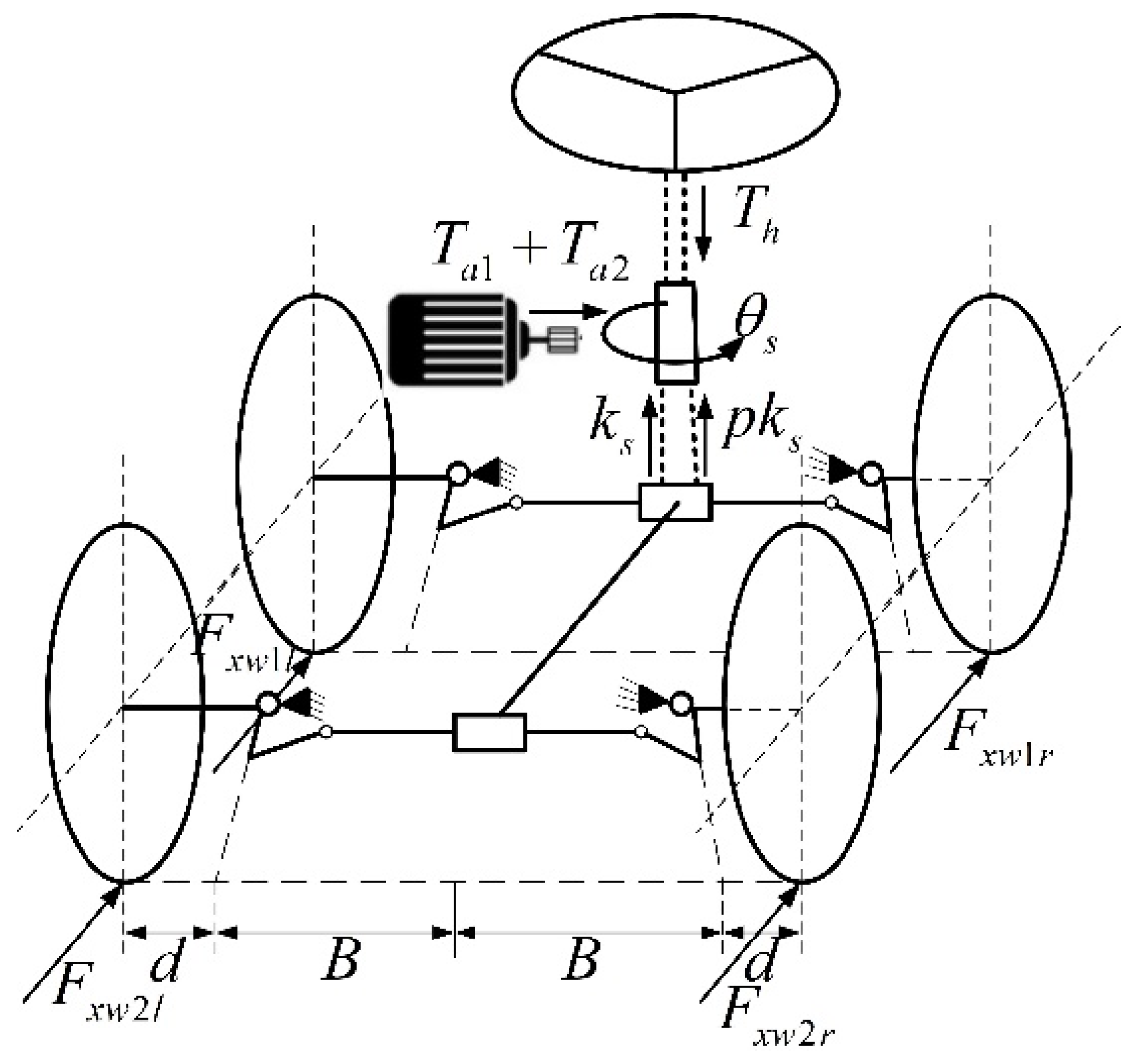
The controlled object is a five-axle heavy vehicle with an assisted steering system, which acts on the first two axles. The assisted steering system is a coupled assisted steering system, which works by outputting assisted steering torque through the assisted steering motor, coupling with the driver’s input torque and the steering system’s aligning torque, and ultimately forming a steering angle response to assist in controlling the vehicle. Meanwhile, each wheel can be controlled independently and precisely by torque. This section builds a path tracking model for assisted driving, including a steering system model, the 2-DOF vehicle model, and the path-tracking model.
The structure of the assisted steering system model is shown in
Figure 2. The assisted steering system includes the first and second axles, with the steering column between the steering wheel and the axle, and the steering dynamics are analyzed with the steering column as the object. The transmission between the steering column and the axle is carried out through gear and rack, and the transmission ratios between the gear and rack and the first and second axles are
and
, respectively. Here,
. The active force received by the assisted steering system includes the torque
applied by the driver through the steering wheel and the assisted steering motor’s assisted torque
, which includes the driver assistance component
and the auxiliary component
.
and
all act directly on the steering column.
achieves fixed proportion torque assistance for the driver, meeting
. Meanwhile, the system is also subjected to differential torque
and aligning torque
acting on the tires of the first and second axles, where differential torque is generated due to inconsistent longitudinal force allocation between the left and right tires. The dynamic equation of the assisted steering system can be expressed as:
In the formula,
is the equivalent moment of inertia of the steering column,
is the equivalent damping,
is the steering column angle. The aligning torque
mainly consists of the lateral force
of the tire and the component of the aligning torque of the tire
, which can be expressed as:
where
and
are the total lateral force and total aligning torque of the corresponding axle,
is the wheel radius, and
is the caster angle.
Due to the fact that differential torque
is obtained from the lower layer torque allocation results, the output torque of the auxiliary steering motor serves as another controllable active force, which can balance the impact of differential torque when necessary to achieve precise control of the steering system. Therefore, the consideration of differential torque
is temporarily ignored in the control model, and the actual output torque of the final auxiliary motor can be calculated by the driver assistance component
, the auxiliary component
, and the differential torque
. The steering system model can be represented as:
The 2-DOF vehicle dynamics model is chosen for the control model, and the force analysis of the 2-DOF vehicle dynamics model is shown in
Figure 3.
The model considers the influence of generalized additional yaw moment
on yaw motion, and the 2-DOF vehicle model is represented as follows:
where
is the total vehicle mass,
is the longitudinal speed,
is the yaw inertia of the entire vehicle.
represents the distance from each axle to the center of gravity (CG). Vehicle sideslip angle and yaw rate can be expressed as
and
.
The path tracking model can be represented as
where
is the lateral distance error,
is the heading angle error, and
is the path curvature.
Organize (3)–(5) to obtain the control system model as shown below:
where the state variable
, the control variable
, and the system disturbance
Due to the calculation of nonlinear tire lateral force and the aligning torque involved in Formula (6), in order to maintain model accuracy and improve control solution speed, the magic tire model under pure side slip conditions is selected to undergo first-order Taylor expansion approximation at the current tire side slip angle
to obtain the corresponding tire force, as follows:
where
and
are the current lateral force and the aligning torque of the tire, which meet the following requirements
,
. At the same time, the local lateral stiffness meets
. The slope of the local aligning torque satisfies
, where
is the vertical load of each axis under static load conditions. The tire sideslip angle can be expressed as
In the control model, there is a relationship
and
between the steering column angle and the first and second axle angles. Combining Equations (6)–(8), the following LTV system control model can be obtained
where
2.2. Vehicle Steady State Analysis Based on Phase Plane
The dynamic response of a vehicle depends on the characteristics of nonlinear tires. Under extreme driving conditions, the dynamic characteristics of vehicle dynamics will change rapidly, and even lead to instability [
17,
18]. The phase plane method, as a time-domain analysis method, is widely used in the study of stability and dynamic characteristics of nonlinear differential systems because it can reveal the equilibrium positions and types in the system, as well as the attractive regions and stable regions related to these equilibria. This section analyzes the dynamic performance of multi-axle heavy vehicles based on the phase plane
, obtaining their critical stable steering angle and critical linear steering angle, and dividing the vehicle stability region based on this.
On the basis of Equation (4), considering the magic tire model with pure side slip, and without considering the additional yaw moment
, the nonlinear system differential equation about
and
can be recorded as
By giving different initial values
to Equation (10), the phase trajectories of the differential equation and the phase plane diagram composed of the phase trajectories can be obtained. With the increase of vehicle steering angle input in the phase plane, the vehicle will undergo a state change from stable to unstable, which is also known as the phase plane bifurcation phenomenon. In order to study the vehicle steering angle under this critical state, two-axle passenger cars usually introduce the lateral slip angle
corresponding to the lateral force saturation of the front and rear tires and analyze the phase plane in detail by combining the yaw rate boundary. For five-axle vehicles, the side slip angles of the front two axles are relatively close, while in the rear three axles, there is a relationship between the side slip angles:
. Therefore, the mean of the first two axles’ sideslip angles and the fifth axle sideslip angle are chosen as the boundary. The specific boundary conditions can be expressed as:
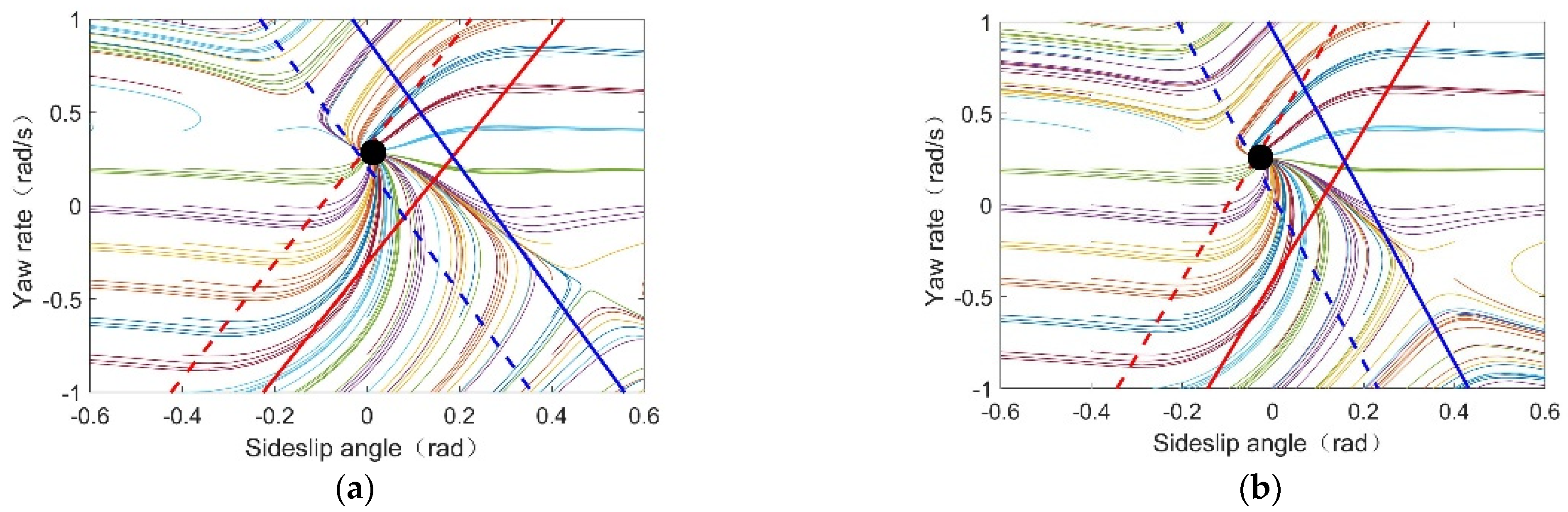
Figure 4 shows the phase plane corresponding to different steering angle inputs under the conditions of road adhesion
and vehicle speed
. The solid circle, solid triangle, and solid diamond in the figure represent the equilibrium point, saddle point, and focal point, respectively. The black, blue, and red lines represent the yaw rate boundary,
boundary, and
boundary, respectively. It can be seen that when
, the vehicle equilibrium points are all within the three corresponding boundaries. As the steering angle increases, the equilibrium point gradually approaches the left saddle point. When
, the left saddle point coincides with the equilibrium point, and the vehicle reaches a critical stable state. At this point, the equilibrium point precisely reaches the saturation limit of
. Note that
is the critical stable steering angle. When
, the system will undergo bifurcation and the equilibrium point of the system will shift from a stable node to a focal point. Comparing
Figure 4b,c, it can be seen that the stable node near the equilibrium point converges faster than the stable focal point. When
, the vehicle state oscillates around the focal point and finally stabilizes. The
corresponding to the stable state exceeds the saturation limit, while the fifth axle with the largest side slip angle among the rear three axles still remains within the boundary of the tire side slip angle, which is caused by the understeer characteristics of the five-axle heavy vehicle. In this case, the vehicle state is difficult to quickly converge, and such a state can also be referred to as instability for the vehicle.
Based on the above phase plane analysis, it can be seen that when the steering angle of the first axle of a multi-axle vehicle exceeds the critical stable steering angle
, the vehicle will enter an unstable state. Selecting a vehicle speed range of 10 m/s~30 m/s and a road adhesion coefficient variation range of 0.1~1, the critical stable steering angle of multi-axle heavy vehicles under multiple operating conditions is calibrated based on the phase plane analysis method. The calibration results are shown in
Figure 5. It can be seen that as the road adhesion coefficient decreases and the vehicle speed increases, the critical stable steering angle
gradually decreases.
The tires linear working area boundary of
and
is introduced for phase plane analysis, and the linear critical steering angle
is calibrated. The specific boundaries introduced are as follows:
where
and
are the lateral slip angle boundaries corresponding to the linear working area of the tire. Under the conditions of road adhesion of 0.8 and vehicle speeds of 15 m/s and 20 m/s, the linear critical steering angle analysis is performed using the phase plane method, as shown in
Figure 6. It can be seen that at a speed of 15 m/s, the corresponding linear critical steering angle
is
; at a speed of
, the corresponding linear critical steering angle
is
. Based on this, the stable state of the vehicle is defined. When
, the vehicle is in a stable state, when
, it is in a transition state, and when
, it is in an unstable state.
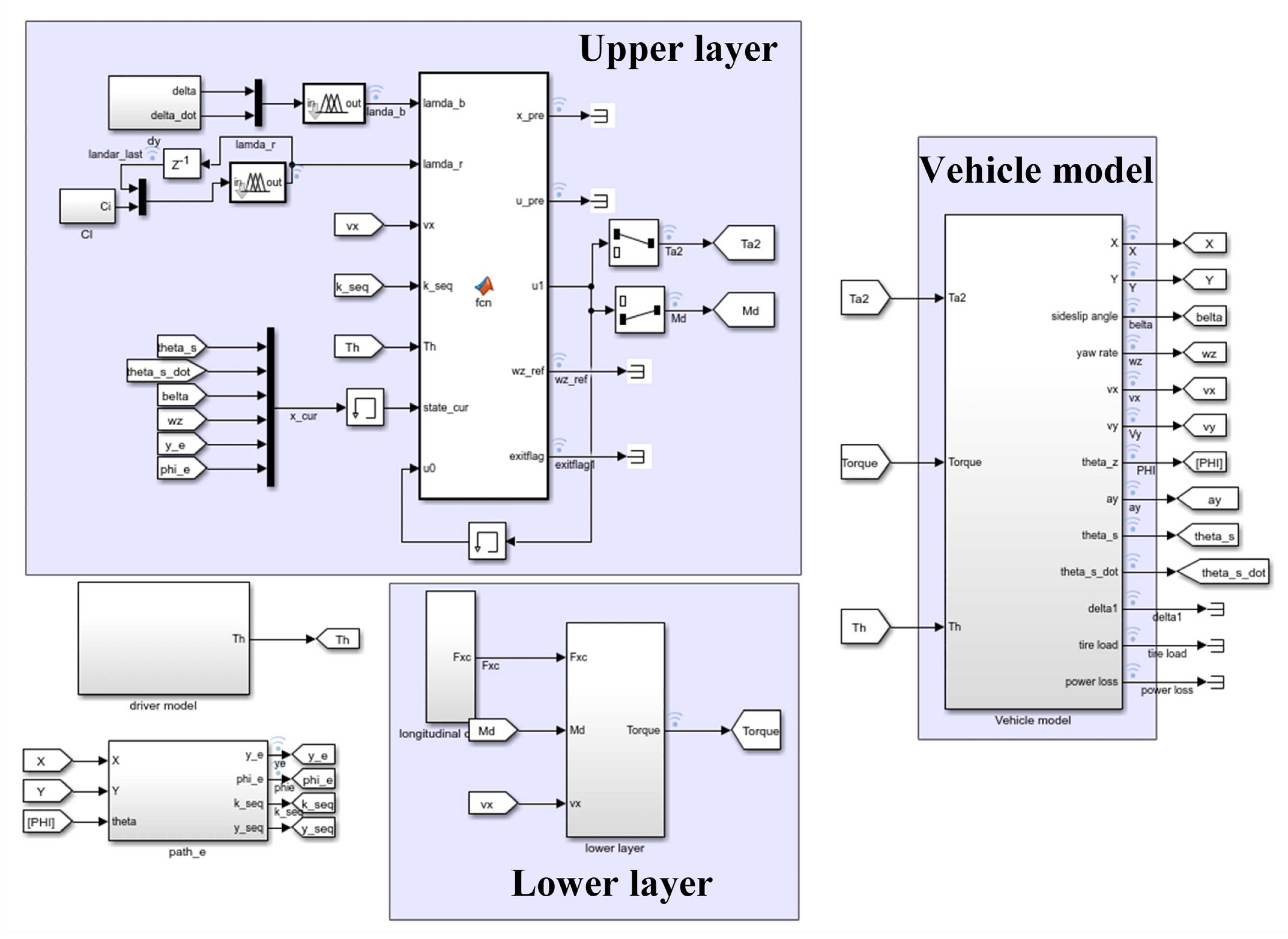
2.3. LTV-MPC Control Strategy Design
In the design of the upper layer controller, it is necessary to control the steering torque of the assisted motor and the additional yaw torque of the vehicle based on the vehicle status, the planned auxiliary obstacle avoidance path, and the driver’s input, in order to ensure that the intelligent assisted system can track the auxiliary obstacle avoidance path while avoiding human–machine conflicts and taking into account vehicle handling stability. When constructing MPC performance indicators, weight adjustment coefficients are considered to balance path tracking and vehicle handling stability. Here, the weight adjustment coefficients are obtained by mapping fuzzy logic rules with human–machine collaboration indicators, steering angle, and steering angle change rate as inputs.
Firstly, the model (9) is discretization by zero order preserving method, which is expressed as follows:
where
,
,
,
,
.
is the sampling interval, and matrices
,
, and
are calculated in real time at each control time based on the longitudinal vehicle speed
,
, and
. The values of
,
, and
are considered to remain constant over the prediction horizon, and the driver torque
in the measurable disturbance matrix
is also considered constant in the prediction horizon.
The cost function
of the assisted driving controller mainly consists of two parts, namely the path tracking cost
and the handling stability cost
. The cost function is specifically represented as follows:
where
and
represent the prediction horizon and the control horizon, respectively.
,
,
,
and
are coefficient matrices that satisfy
.
is the control increment that satisfies
.
are the reference values of the output variable.
,
and
are the error weight matrices of the corresponding output variable.
and
are the weight matrices of the corresponding control variable, and
and
are the weight matrices of the corresponding control increment.
is the assisted driving weight adjustment coefficient,
is the stability weight adjustment coefficient, and their range is 0~1.
are constants, where the purpose of
is to ensure that the cost function is meaningful when
.
is the relaxation weight coefficient, and
is the relaxation variable of the state constraint.
The weight matrices and involved in cost function remain unchanged, and in multi-objective optimization, the coefficients and play a regulatory role in the cost function. The cost of path tracking is mainly used to adjust the effect of human–machine collaborative steering. When there is a significant human–machine conflict, the weight of path tracking is reduced, while the relevant penalties for control are increased to suppress the machine’s effort in steering for path tracking. is used to balance and improve the dynamic performance of the vehicle. Generally, priority is given to ensuring the maneuverability of the vehicle. When the vehicle is in an unstable state, the weight of the vehicle sideslip angle error can be increased to maintain vehicle stability.
The path tracking error reference
satisfies
and
. Stability control takes zero sideslip angle of the vehicle as the control objective, meeting
. In the process of assisting obstacle avoidance, good vehicle handling can enhance the driving experience. A steady-state reference model is used as the reference for yaw rate control, meeting
. The reference yaw rate is represented as:
where
and
are the stability factor and equivalent wheelbase, respectively.
In the setting of constraints, it is necessary to constrain the control variable and the control increment . In the constraint of state variables, the constraints of the vehicle sideslip angle and yaw rate are satisfied , .
The optimization problem of MPC collaborative assisted driving control strategy can be summarized as follows:
where
,
,
,
,
, and
is the specific constraint matrix.
2.4. Fuzzy Collaborative Control Strategy
The fuzzy collaborative control strategy includes four input parameters, namely the human–machine cooperation index and the assisted driving weight adjustment coefficient at the previous moment , the vehicle’s steering angle and angle change rate . The input variables are inferred through two fuzzy rule bases, namely human–machine conflict and handling stability, to obtain the assisted driving weight adjustment coefficient and the stability weight adjustment coefficient , in order to achieve human–machine collaborative control and handling stability collaborative control. The following are introductions to two fuzzy control strategies.
- (1)
Fuzzy strategy for human-machine collaboration
The human–machine cooperation index
consists of three parts, namely the steering torque index
, the steering torque change rate index
, and the human–machine target path consistency index
, expressed as follows:
The definition of
is related to the torque difference between humans and machines. Under cooperative driving, the torque direction is the same, while on the contrary, the torque is opposite and conflicting. The definition of
is as follows:
where
is the average value of the torque auxiliary component, and
is the average value of the driver’s output torque range.
At the same time, the direction of change in human–machine torque also reflects the cooperative state of the human–machine. The steering torque change rate index
is used to supplement the lack of the human–machine conflict description in
, defined as:
In the formula, and are the rate of change of the torque auxiliary component and the rate of change of the driver’s output torque, while and are the average values of the range of torque change rates.
The human–machine target path consistency index
in the future can be used as one of the evaluation factors for its cooperation possibility, and the specific definition of
is:
where
and
are the intelligent assistance system and the driver’s intended path point,
is the length of the path point, and
is the normalization coefficient.
The range of variation for
,
,
, and
is
. When
approaches 0, it indicates a significant conflict in the willingness of human–machine behavior, while on the contrary, it indicates that the human–machine is in a highly cooperative state. The universe of the human–machine cooperation index
is
. The set of fuzzy language values is defined as
, corresponding to low, medium-low, medium, medium-high, and high cooperation, respectively. The specific membership function design is shown in
Figure 7a. The input variable
is the assisted driving weight adjustment coefficient at the previous moment, and the assisted driving weight adjustment coefficient
of the current moment needs to be determined based on the human–machine cooperation index
of the current moment in
. This can ensure a smooth transition of the weight adjustment coefficient and avoid controller solution oscillation caused by weight mutation. The universe of the assisted driving weight adjustment coefficient at the previous moment
is
and the set of fuzzy language values is defined as
,corresponding to low, medium-low, medium, medium-high, and high control.
Figure 7b shows the membership function of
. The universe of the assisted driving weight adjustment coefficient
is
. The set of fuzzy language values is defined as
, which also correspond to different levels of control permissions (low, medium-low, medium, medium-high, high) of the intelligent assisted driving system. The specific membership function design of the output is shown in
Figure 7c, and the specific definition of human–machine collaboration fuzzy rules is shown in
Table 1.
- (2)
Collaborative fuzzy strategy for handling stability
Based on the analysis of the stable state of the vehicle, the stable state, transitional state, and unstable state of the vehicle are defined according to the steering angle
under different operating conditions. In addition, the driving process of the vehicle is transient, so based on this, the real-time state of the vehicle is evaluated by combining the angle change rate
. When the angle change rate is greater, the vehicle is more likely to lose stability. The universe of
is based on the range of steering angle constraints
and the set of fuzzy language values are defined as
, corresponding to negative large, negative small, zero, positive small, and positive large, respectively. A road adhesion coefficient of 0.8 and a vehicle speed of 20 m/s are used as the nominal operating conditions, and the critical steering angles
and
are combined to divide the interval for membership function design, as shown in
Figure 8a. For other operating conditions, the steering angle can be mapped to the nominal operating condition based on the obtained calibrated critical steering angle data and the principle of proportionality.
is the angle change rate, which represents the change of the steering angle per unit time. Its universe is
. Based on the same nominal operating conditions, two critical angle change rates are set as
and
, defined in the fuzzy language set as
, and the membership function design is shown in
Figure 8b. The universe of output variable
is
, and the fuzzy language set is
, corresponding to low, medium-low, medium, medium-high, and high stability control, respectively. The membership function design is shown in
Figure 8c.
The specific definition of fuzzy rules is shown in
Table 2. The general rule is that as the steering angle approaches the unstable region and the rate of steering angle change increases, the vehicle transitions from handling control to stability control, and the value of
gradually increases.
The fuzzy logic MAP diagram of human–machine collaboration and handling stability collaboration is shown in
Figure 9. The color of the fuzzy graph corresponds to the value of the z-axis.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}