4.3.1. Analytical Model
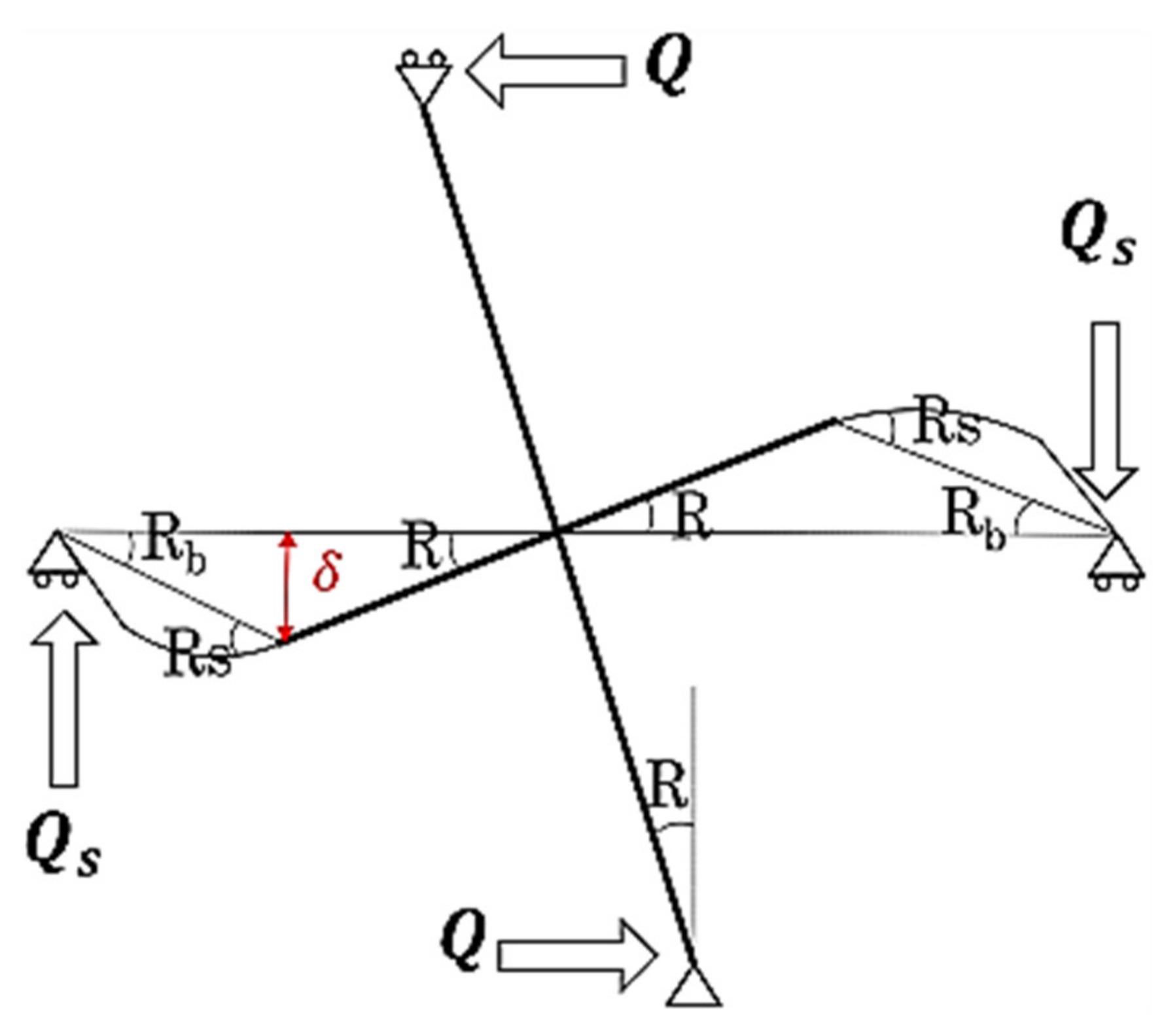
The dimension diagram of an individual wall-slab joint is shown in
Figure 7a, while
Figure 7b presents the deformation diagram when a lateral load named by
is subjected to the top of the bearing wall, in which the wall and joint portion are assumed as rigid bodies.
is the rotational angle at the foot of the bearing wall while
represents the rotational angle of the effective beam, and
represents half the slab span length.
Thus, the rotational stiffness
of the entire wall-slab joint can be expressed using the lateral load
and the rotational angle
that represents the deformation angle of the strong bearing wall as given by Equation (1).
Due to considerations of (i) the force supporting at the slab ends represented by
, (ii) the rotational angle at the end of the effective beam noted using
, and (iii) the connection portion treated as a rigid region, the stiffness of the effective beam
can be consequently expressed as given by Equation (2).
Next, a relationship between
and
can be established using
,
,
, and
as shown in Equation (3).
Because there is a relationship between
and
concerning the equilibrium of moment around the joint core as shown in Equation (4), “
/
” can thus be expressed as shown in Equation (5) by rearranging Equation (4).
Additionally, “
/
” can be expressed using dimensions of wall and slab as given by Equation (6) due to the assumptions that the wall and the connection portion are treated as rigid bodies. It is noted that this equation is theoretically correct if the plastic hinge forms on the slab and is adjacent to the joint core.
Accordingly, by rearranging Equation (3) after substituting in “
” and “
” using Equations (5) and (6), respectively, “
” can be expressed by Equation (7) using values of the joint dimensions.
Thus, the effective beam stiffness
can be obtained from
by rearranging Equation (7) as shown in Equation (8).
On the other hand, considering the thickness of the slab is
,
can be as well expressed by Equation (9) if the required moment of inertia of area
is known.
Additionally, considering the effective beam as a normal beam element in which the flexible length of the beam is represented by
(equals to “
-
”) as shown in
Figure 7a, the rotational angle of the effective beam represented by
can be consequently expressed by Equation (10).
Thus, assuming the stiffness of the effective beam as
,
can be given by Equation (11) by rearranging Equation (10), where the moment of inertia of area
has been given by Equation (12).
By substituting Equation (12) for
into Equation (11),
can be expressed by Equation (13).
Because
and
are both representing the stiffness of the effective beam, indicating they should be equal, by setting
expressed by Equation (13) to be equal with
expressed by Equation (8) as shown in Equation (14), Equation (15) can thus be obtained. By rearranging Equation (15), the effective beam width
is consequently expressed by Equation (16) using the joint stiffness
, component dimensions, and material features of the wall-slab joint.
Additionally, because
can also be expressed by “
”, where
represents the lateral force applied to the top of the wall while
represents the rotational angle at the wall foot, Equation (16) can be rearranged to Equation (17).
As a result, Equation (17) can be considered as the effective beam model to calculate the stiffness of an individual wall-slab joint under a lateral load representing an earthquake excitation. It is noted that parts of “”, “”, and “” can be obtained from model dimensions and material features, such as wall length, slab thickness, Young’s modulus of concrete, and others which can be obtained directly from design details. Only the and which represent the applied lateral force and the rotational deformation angle of the joint are needed carefully discussed for applying this model in practical design.
Firstly,
can be taken by the value of 0.05% due to the initial stiffness defined as the secant stiffness at 0.05% inter-story drift ratio (corresponding to 1/2000 rad inter-story deformation angle according to WRC Standard [
3]). Therefore, Equation (17) can thus be rearranged to Equation (18) for predicting the effective beam width for the initial stiffness.
Next, for the applied lateral force
, if the average shear stress distributing over its bearing wall cross-section plane of wall-slab joints when the required deformation value which represents the initial stage reaches, the value of
for Equation (18) can consequently be obtained by multiplying the average shear stress and its total cross-sectional area of the bearing wall. However, it is hard to accurately estimate the average shear stress distributed over the bearing wall, due to the shear stress of concrete at a very small deformation angle which is not stable nor identical for different situations. Therefore, to accurately estimate the value of force
applied to the bearing wall when the defined initial stage reaches, results of an experimental cyclic lateral loading test of thick wall-thick slab joints in TWTS structures conducted at Yamaguchi University in 2016 [
6,
7] are employed in this work. The measured lateral force applied on the top of the bearing wall at the inter-story drift ratio of 0.05% for specimens in their tests is used to provide a reasonable estimate of
at 0.05% inter-story drift ratio. These values from their experimental results are employed as criterion values and a correction coefficient is defined. Thus, by applying the criterion value and correction coefficient, an estimation of the crucial factor
for the effective beam width of initial stiffness prediction can be obtained. Detailed information of their experimental tests related to this work and the model processing using their resultant data are explained in the following sections.
4.3.2. Model Processing Using Experimental Tests Results
Four 1/2-scaled specimens of thick wall-thick slab joints were tested in Inai et al.’s experimental tests [
6,
7], from which three specimens are selected for the modeling processing in this work. Specimen 1 and 2 have slabs on both sides while Specimen 3 only has an individual slab on one side as shown in
Figure 8 and
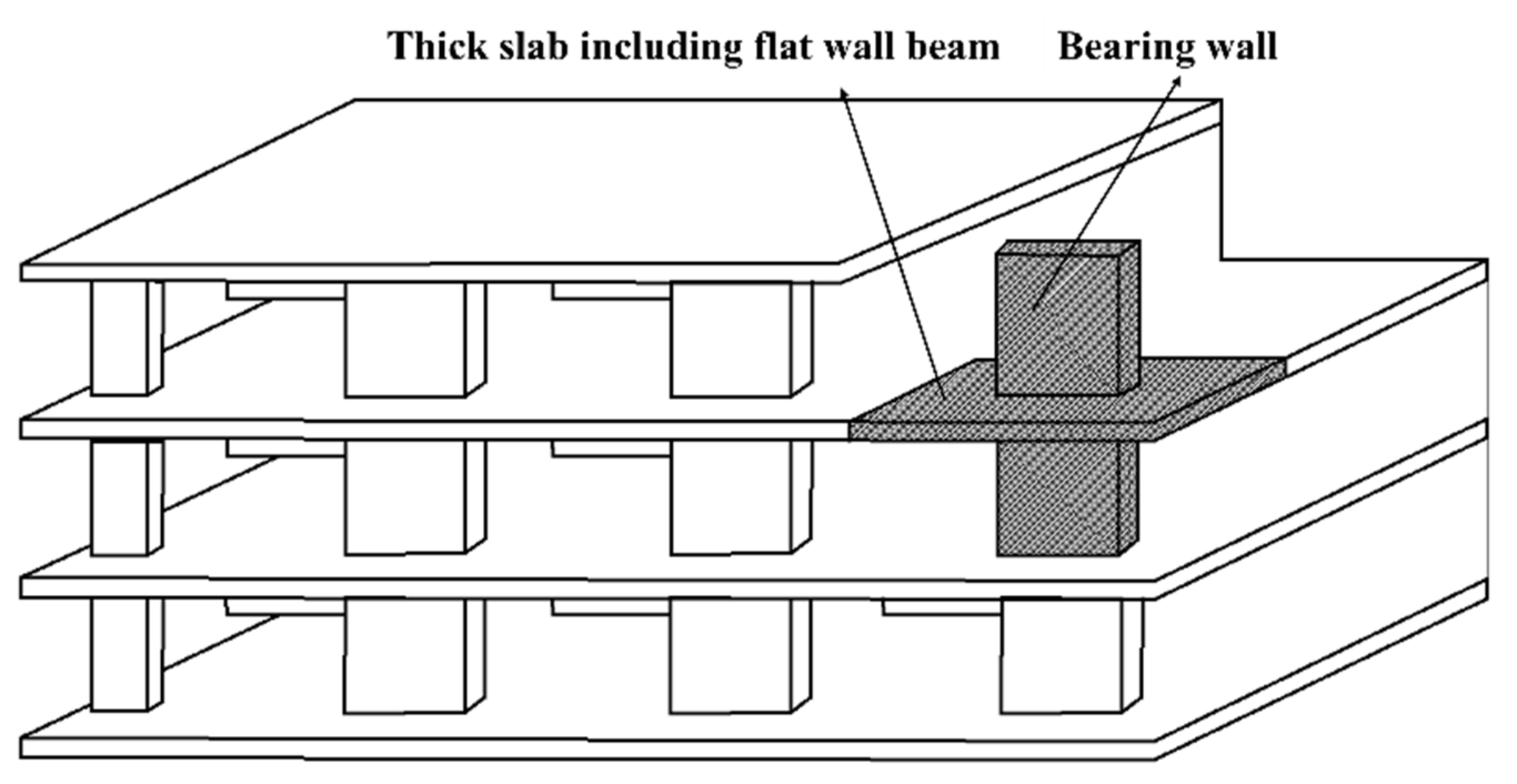
Figure 9, respectively. The specimens have a uniform dimension for bearing wall (500 mm length, 1500 mm height, and 175 mm depth), flat slab (span length of 1500 mm and slab thickness of 175 mm), and the invisible beams that are concealed in the flat slab (length of 1500 mm equal to that of the slab, width of 350 mm, and depth of 175 mm). It is noticed that in their work, the bearing wall is not arranged symmetrically in the north-south direction, which is caused by the design consideration for the interior and exterior spaces (such as different reinforcement distribution for the indoor space and the balcony space). However, it is not affecting the flexural stiffness of solid components so that the discrepancy of the invisible beam component can be ignored for the stiffness calculation. Additionally, the properties and test results for concrete and steel materials in their test are summarized in
Table 1.
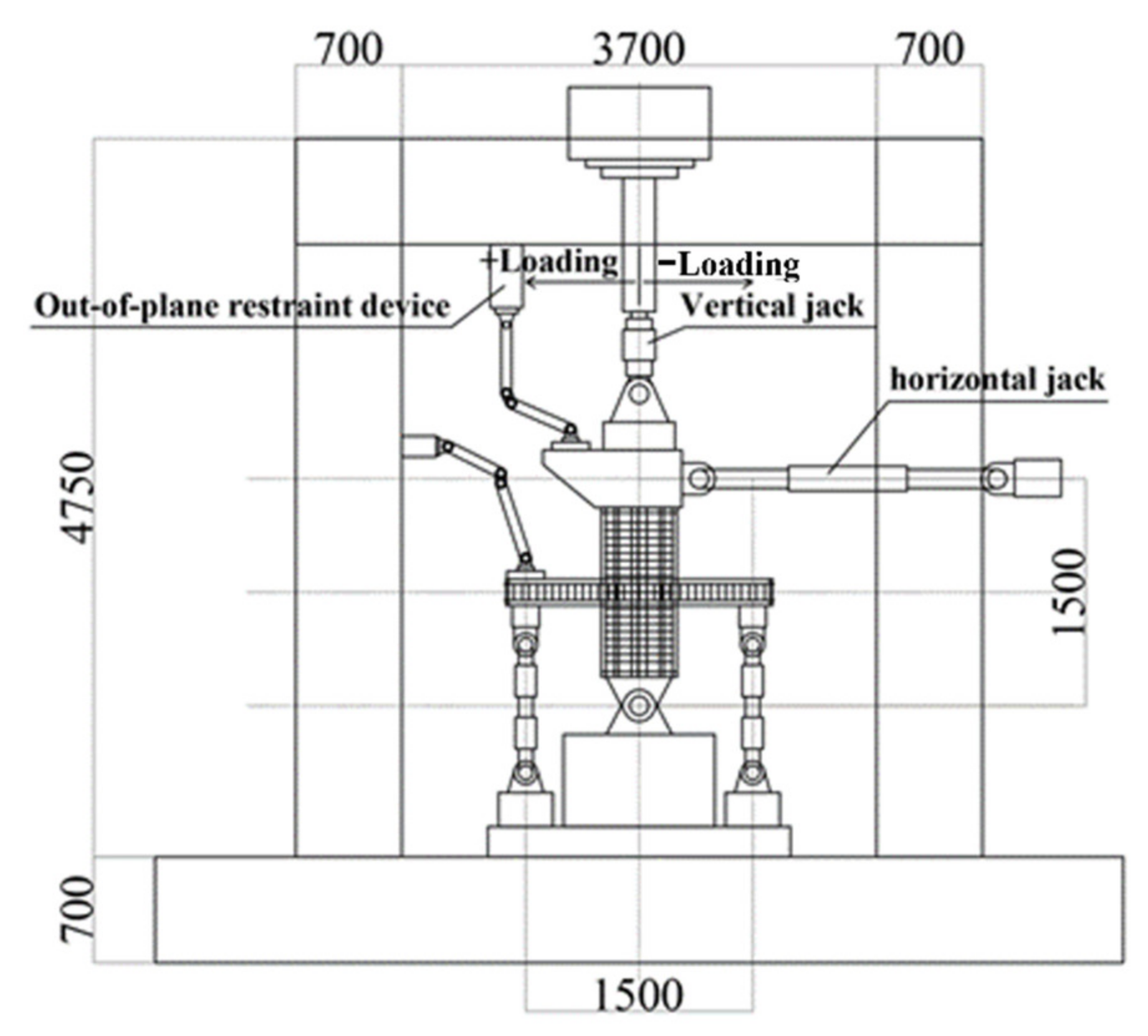
The fixity condition and test setup are shown in
Figure 10. The bottom of the bearing wall was pin-supported on the strong ground to restrain the horizontal and vertical movements of the base, the top of the bearing wall was free where cyclic lateral loadings were applied, and both ends of the slab were roller-supported and restrained only in the vertical direction to simulate points of inflection.
Considering that the initial stiffness was defined as the secant stiffness at 0.05% inter-story drift ratio, the results from their experimental test of the lateral force at 0.05% drift ratio are defined as criterion values of the input lateral force
, in which the subscript “0” represents the criterion value. Additionally, the specimen and material properties from their experimental test are as well considered as criterion values for further model processing, such as
for the wall cross-sectional area,
for the wall length,
for the wall thickness, and so on. Moreover, the initial stiffness
using Equation (1) and the effective beam width
using Equation (18) can be obtained as summarized in
Table 2. It can be noted that for wall-slab joints with only one-side slabs, the effective beam is 2.60 times the uniform thickness while for joints with both-side slabs, it should be taken by 3.20 times.
Thus, these values obtained from Inai et al.’s results can be used to estimate the lateral force for the effective beam width model at the initial stage. To estimate the lateral force in Equation (18) using the criterion value , a correction coefficient that represents the relationship between the target value and is established in the following section.
First of all,
representing the criterion value of the average shear stress distributed over the cross-sectional plane of the bearing wall at the 0.05% inter-story drift ratio is defined and it can be obtained using the criterion lateral force
divided by the total cross-sectional area of the bearing wall. Based on the measured results from Inai et al.’s experimental tests,
equals 0.28
for both-slab joints while 0.21
for one-slab joints. Additionally,
represents the criterion value of the total cross-sectional area of the bearing wall,
represents the criterion value of the length of the bearing wall which equals 500 mm, and
is the criterion value of the thickness of the bearing wall which equals 175 mm. Thus, the criterion lateral force
can be expressed using the criterion average shear stress
, multiplying the criterion value of the total cross-sectional area of the bearing wall
(equaling to the product of
and
) as shown in Equation (19):
where,
: Criterion value of average shear stress distributed over the cross-sectional plane of the bearing wall.
: Criterion value of the total cross-sectional area of the bearing wall.
: Criterion value of the length of the bearing wall.
: Criterion value of the thickness of the bearing wall.
Similarly, for a target wall-slab joint, the lateral force
applied at the 0.05% inter-story drift ratio can be expressed using its average shear stress
which is distributing over its bearing wall cross-section plane, multiplying its total cross-sectional area of the bearing wall
(equaling to the product of
and
) as shown in Equation (20):
where,
: Average shear stress distributed over the cross-sectional plane of the bearing wall.
: Total cross-sectional area of the bearing wall.
: Length of the bearing wall.
: Thickness of the bearing wall.
Thus, as given by Equation (21), a correction coefficient
can be established by
shown in Equation (20) divided by
shown in Equation (19). It is noted that only if the dimensions of the bearing wall is designed identical to that in Inai et al.’s models, the correction coefficient
is thus as well the correction coefficient between the average shear stress
and the criterion average shear stress
.
As shown in
Figure 11, the supporting force applied to the slab end can be defined as
and has a relationship with
as given by Equation (22).
Concerning the geometric relationship, the rotational angle at the slab end
can be expressed by
plus the rotational angle of the bearing wall
, as given by Equation (23).
Assuming the displacement of the end of the rigid connection area is
,
can be expressed by multiplying the rotational angle and the flexural length for both sides as shown in Equation (24) and
Figure 11, where the definition of flexural length
and
are explained in
Figure 7.
Next, by substituting Equation (24) for
into Equation (23),
can thus be expressed using the rotational angle
and joint dimensions as given by Equation (25).
The slab stiffness can be expressed in two ways: (i)
divided by
shown in Equation (2), and (ii)
divided by squared slab flexural length
as given by Equation (26), respectively. By equalling these two formulas,
can thus be expressed as shown in Equation (27).
Then, by substituting Equation (25) for
into the Equation (27),
can accordingly be expressed by
as shown in Equation (28).
Next, substituting Equation (28) for
into Equation (23), and considering
equals “
”, a relationship between
and
can be established as given by Equation (29).
Using this formula, the criterion value
can consequently be expressed as given by Equation (30).
Thus, a correction coefficient
representing the ratio between the unknown value
for a target wall-slab joint and the criterion value
can be established using Equation (29) divided by Equation (30) as given by Equation (31).
Because the initial stiffness is defined as 0.05% inter-story drift ratio in this study, “
” can be substituted into Equation (31). Thus, Equation (31) is simplified to Equation (32) by eliminating
and
. Generally, the applied lateral force changes and the stiffness reduction needs to be considered as the deformation process, which leads to a reduction of the effective beam width, while when the deformation is small enough, the deformation change and the stiffness reduction can be ignored so that the stiffness can be seen as a constant value. Thus, the applied lateral force can be consequently considered stable as a constant. Based on these considerations, it is noted that the
and
are set as 1/2000 rad for the initial stage in this work because the deformation angle is relatively small enough at the initial stage.
Additionally, the moment of inertia of area
and
in Equation (32) are assumed by 3.20 times the wall thickness for joints with both-side slabs and 2.60 times the wall thickness for joints with one-side slab according to measured results from the experimental data as shown in
Table 2 previously.
Thus, the unknown value
can be estimated using the criterion value
and the correction coefficient
is given by Equation (33).
As a result, an estimated value of the lateral force at the initial stage obtained using Equations (32) and (33) can thus be applied to Equation (18) for predicting the effective beam width for the initial stiffness. This analytical-based, effective beam width estimation is derived for practical designing the wall-slab joints in TWTS structures. The proposed effective beam-width model provides a relatively accurate and convenient estimation for determining the slab design by limiting the minimum value on the width. Additionally, using this proposed model, it can as well model the entire wall-slab joints as a wall-beam frame, which leads to a simplified two-dimension frame analysis by substituting the slab components using the proposed effective beam.
4.3.3. Discussions on Influencing Factors
In the proposed model of the effective beam width for the initial stiffness, various features of the joint including the configuration dimensions and material properties, such as the concrete elastic modulus , the thickness of the slab , half of the wall height , half of the wall height , half of the slab span length , and the flexural length of the slab has been considered. The influence of two main factors, the wall height “”, the wall length “”, and the slab span length of “” on the effective beam width prediction is discussed in this section.
Considering a situation in which except for the parameter of “”, other features of the wall-slab joints are kept identical to discuss the influence of “”, due to the strong bearing wall being assumed as a rigid body, the rotational angles generated for the slab ends are usually equaling to the value at an identical deformation angle occurring around the bearing wall footing at the initial stage. In other words, the input moment transferred over the effective beam is identical for cases with different values of . Thus, the value of “” is consequently considered unchanged for different wall-slab joint models with different “”. As a result, it can be known that if only the value of “” is changing while other variables are kept identical, the value of predicted using Equation (18) is a constant. However, it should be noticed that the model was developed by assuming the bearing wall was a rigid body, which was reasonable considering calculation simplification but not completely true in reality. In actual structures, initial and growing cracks, shrinkage, creeps, or other damages occur in the bearing wall, which could make the stiffness of the bearing wall reduce, can bring slight influences on the value of “” and leads to the value of “” not keeping a constant and showing a slight change. As a result, in the situation that only “” changes, it can be considered that the effective beam width is predicted identical at the initial stage with sufficiently small deformation, based on which slight influences can be ignored.
Due to
equals to “
”, Equation (18) can also be expressed by Equation (34).
It can be known that is disproportionate to the thickness of the slab “”, while for the group of “”, more discussions are needed to figure out how these two parameters, and , influence the value of . In the group “”, as the value of wall length increases, the part of “” representing the flexural length of the effective beam decreases, which leads to a reduction of the calculation value of . Thus, it can be indicated that the length of the bearing wall is as well disproportionate to the value of . On the other hand, in the situation that the slab span length increases, both of “” as well as “” increases, which is not clear to determine whether the value of “” increases or decreases. Therefore, for the parameter of the span length of the slab , further investigations are needed in future work.











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}