
Longitudinal Mode System Identification of an Insect-like Tailless Flapping-Wing Micro Air Vehicle Using Onboard Sensors



Abstract
:Featured Application
Abstract
1. Introduction
2. KUBeetle
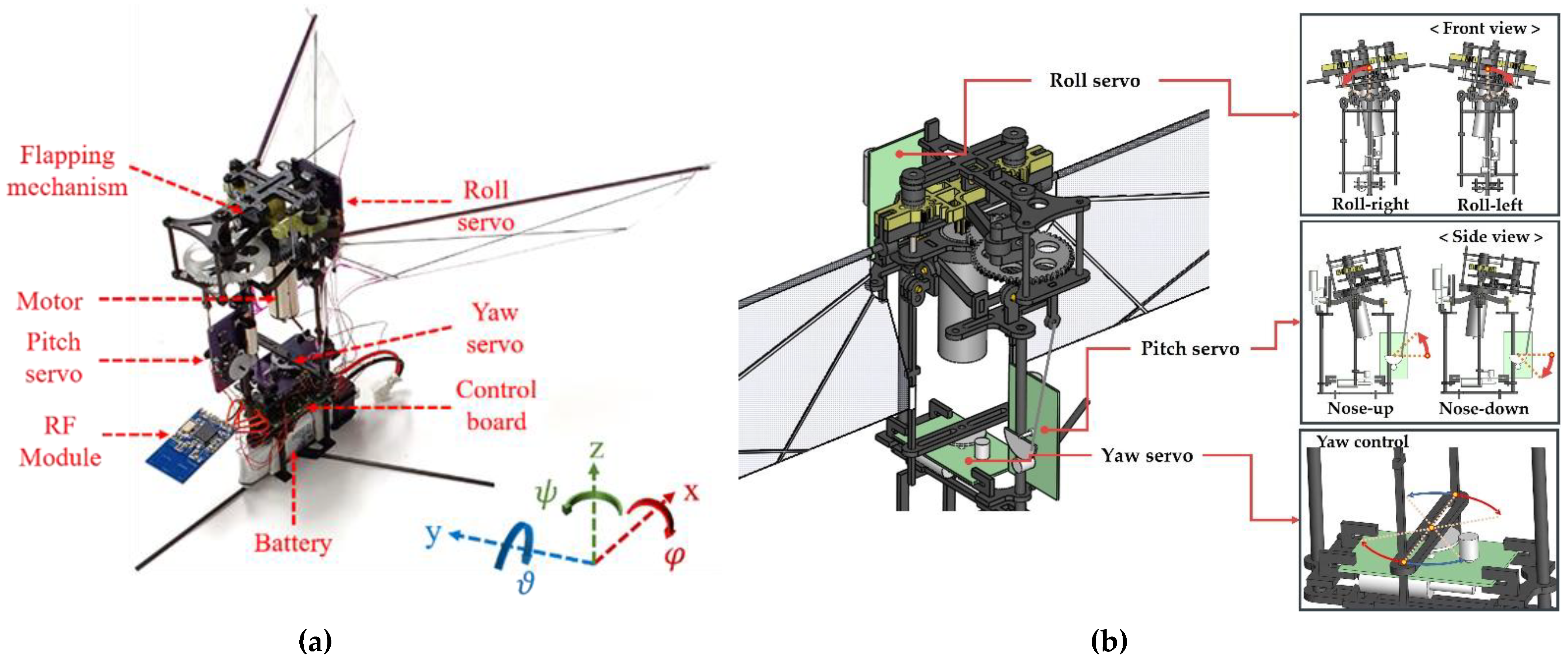
2.1. KUBeetle Design
2.2. Dynamic Model
3. Experimental Flight and System Identification
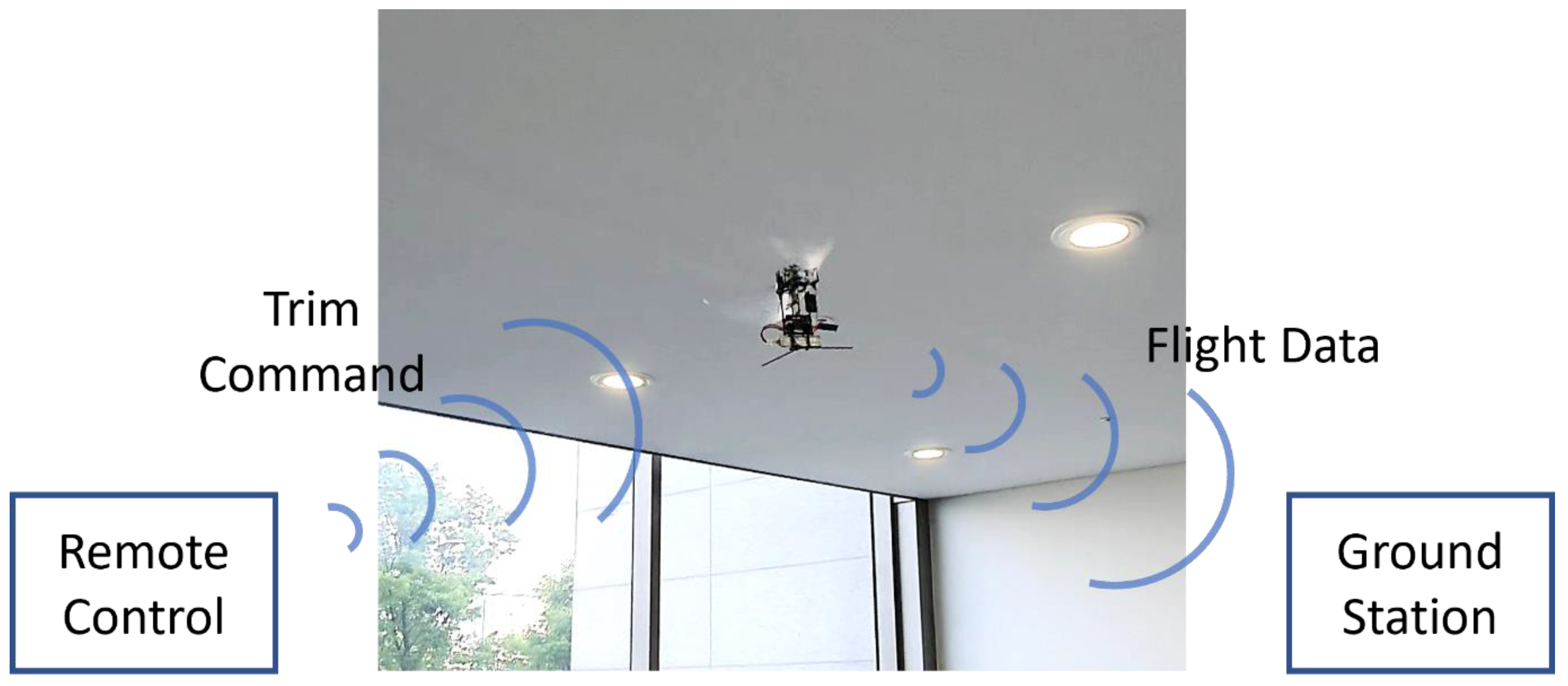
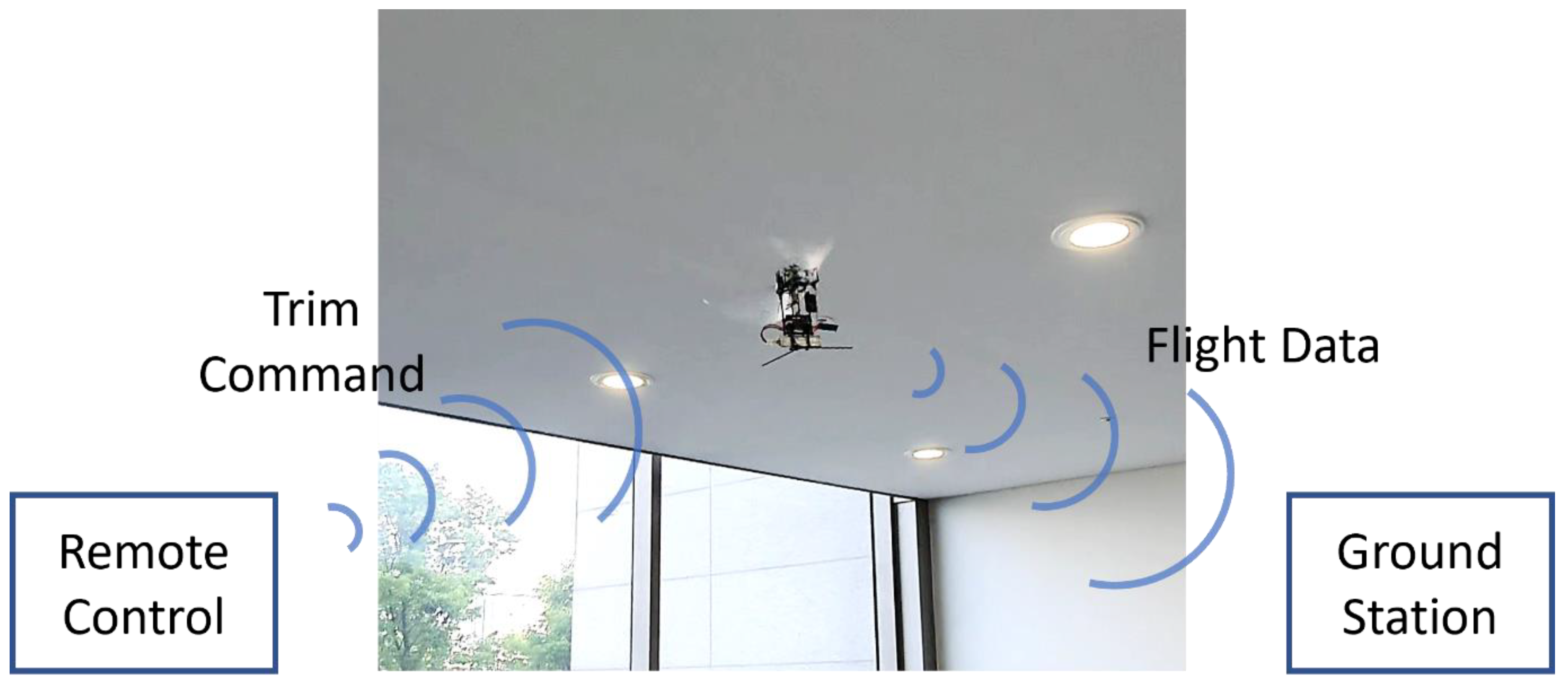
3.1. Experimental Flight Setup
3.2. Data Acqusition for System Identification via Experimental Flight
3.3. Linear Model Refinement in System Identification
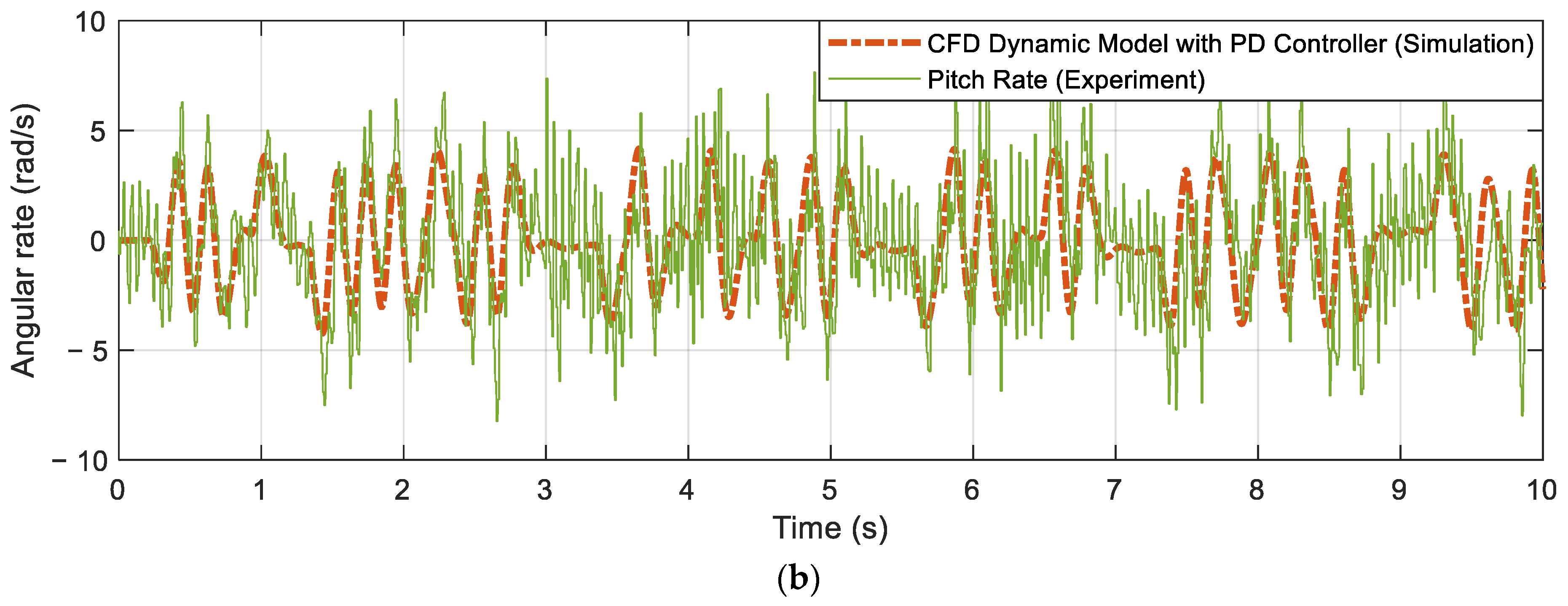
3.4. Dynamic Model Analysis and Verification
4. Conclusions
Supplementary Materials
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Sanchez, C.; Arribart, H.; Giraud Guille, M.M. Biomimetism and Bioinspiration as Tools for the Design of Innovative Materials and Systems. Nat. Mater. 2005, 4, 277–288. [Google Scholar] [CrossRef] [PubMed]
- Tan, R.; Liu, W.; Cao, G.; Shi, Y. Creative Design Inspired by Biological Knowledge: Technologies and Methods. Front. Mech. Eng. 2019, 14, 1–14. [Google Scholar] [CrossRef] [Green Version]
- Fukuda, T.; Chen, F.; Shi, Q. Special Feature on Bio-Inspired Robotics. Appl. Sci. 2018, 8, 817. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Chen, W.; Xiao, X.; Xu, Y.; Li, C.; Jia, X.; Meng, M.Q.-H. A Survey of the Development of Biomimetic Intelligence and Robotics. Biomim. Intell. Robot. 2021, 1, 100001. [Google Scholar] [CrossRef]
- Biswal, P.; Mohanty, P.K. Development of Quadruped Walking Robots: A Review. Ain Shams Eng. J. 2021, 12, 2017–2031. [Google Scholar] [CrossRef]
- Zhu, H.; Gu, S.; He, L.; Guan, Y.; Zhang, H. Transition Analysis and Its Application to Global Path Determination for a Biped Climbing Robot. Appl. Sci. 2018, 8, 122. [Google Scholar] [CrossRef] [Green Version]
- Liljebäck, P.; Pettersen, K.Y.; Stavdahl, Ø.; Gravdahl, J.T. A Review on Modelling, Implementation, and Control of Snake Robots. Robot. Auton. Syst. 2012, 60, 29–40. [Google Scholar] [CrossRef] [Green Version]
- Razif, M.; Mohd Faudzi, A.A.; Mohd Nordin, I.N.A.; Natarajan, E.; Yaakob, O. A Review on Development of Robotic Fish. J. Transp. Syst. Eng. 2014, 1, 12–22. [Google Scholar]
- Duraisamy, P.; Kumar Sidharthan, R.; Nagarajan Santhanakrishnan, M. Design, Modeling, and Control of Biomimetic Fish Robot: A Review. J. Bionic Eng. 2019, 16, 967–993. [Google Scholar] [CrossRef]
- A Robot That Flies like a Bat. Nature 2017, 542, 140. [CrossRef] [Green Version]
- Bie, D.; Li, D.; Xiang, J.; Li, H.; Kan, Z.; Sun, Y. Design, Aerodynamic Analysis and Test Flight of a Bat-Inspired Tailless Flapping Wing Unmanned Aerial Vehicle. Aerosp. Sci. Technol. 2021, 112, 106557. [Google Scholar] [CrossRef]
- Han, J.-H.; Lee, J.-S.; Kim, D.-K. Bio-Inspired Flapping UAV Design: A University Perspective. In Health Monitoring of Structural and Biological Systems 2009; Kundu, T., Ed.; SPIE: Bellingham, WA, USA, 2009; pp. 466–477. [Google Scholar]
- Tan, X.; Zhang, W.; Ke, X.; Chen, W.; Zou, C.; Liu, W.; Cui, F.; Wu, X.; Li, H. Development of Flapping-Wing Micro Air Vehicle in Asia. In Proceedings of the 10th IEEE World Congress on Intelligent Control and Automation, Beijing, China, 6–8 July 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 3939–3942. [Google Scholar]
- Mwongera, V.M. A Review of Flapping Wing MAV Modelling. Int. J. Aeronaut. Aerosp. Res. 2015, 2, 27–36. [Google Scholar] [CrossRef]
- Unver, O.; Uneri, A.; Aydemir, A.; Sitti, M. Geckobot: A Gecko Inspired Climbing Robot Using Elastomer Adhesives. In Proceedings of the 2006 IEEE International Conference on Robotics and Automation, ICRA 2006, Orlando, FL, USA, 15–19 May 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 2329–2335. [Google Scholar]
- Nansai, S.; Mohan, R. A Survey of Wall Climbing Robots: Recent Advances and Challenges. Robotics 2016, 5, 14. [Google Scholar] [CrossRef] [Green Version]
- Sanfilippo, F.; Azpiazu, J.; Marafioti, G.; Transeth, A.; Stavdahl, Ø.; Liljebäck, P. Perception-Driven Obstacle-Aided Locomotion for Snake Robots: The State of the Art, Challenges and Possibilities. Appl. Sci. 2017, 7, 336. [Google Scholar] [CrossRef]
- Ward, T.A.; Fearday, C.J.; Salami, E.; Binti Soin, N. A Bibliometric Review of Progress in Micro Air Vehicle Research. Int. J. Micro Air Veh. 2017, 9, 146–165. [Google Scholar] [CrossRef]
- Phan, H.V.; Park, H.C. Insect-Inspired, Tailless, Hover-Capable Flapping-Wing Robots: Recent Progress, Challenges, and Future Directions. Prog. Aerosp. Sci. 2019, 111, 100573. [Google Scholar] [CrossRef]
- Park, H.C.; Vu, P.H.; Lee, J.H. Tailless Insect-Mimicking Flapping-Wing Micro Air Vehicle: A Review and Perspective. J. ICROS 2019, 25, 960–965. [Google Scholar] [CrossRef]
- Gerdes, J.W.; Gupta, S.K.; Wilkerson, S.A. A Review of Bird-Inspired Flapping Wing Miniature Air Vehicle Designs. J. Mech. Robot. 2012, 4, 021003. [Google Scholar] [CrossRef] [Green Version]
- Taylor, G.K. Mechanics and Aerodynamics of Insect Flight Control. Biol. Rev. 2001, 76, 449–471. [Google Scholar] [CrossRef]
- Dudley, R. The Biomechanics of Insect Flight: Form, Function, Evolution; Princeton Paperbacks; Princeton University Press: Princeton, NJ, USA, 2002; ISBN 978-0-691-09491-5. [Google Scholar]
- Alexander, D.E. Nature’s Flyers: Birds, Insects, and the Biomechanics of Flight; Johns Hopkins University Press: Baltimore, MD, USA, 2004; ISBN 978-0-8018-8059-9. [Google Scholar]
- Sun, M. Insect Flight Dynamics: Stability and Control. Rev. Mod. Phys. 2014, 86, 615–646. [Google Scholar] [CrossRef]
- Zhang, C.; Rossi, C. A Review of Compliant Transmission Mechanisms for Bio-Inspired Flapping-Wing Micro Air Vehicles. Bioinspir. Biomim. 2017, 12, 025005. [Google Scholar] [CrossRef] [PubMed]
- Keennon, M.; Klingebiel, K.; Won, H. Development of the Nano Hummingbird: A Tailless Flapping Wing Micro Air Vehicle. In Proceedings of the 50th AIAA Aerospace Sciences Meeting including the New Horizons Forum and Aerospace Exposition, Nashville, TN, USA, 9–12 January 2012; American Institute of Aeronautics and Astronautics: Nashville, TN, USA, 2012. [Google Scholar]
- Ma, K.Y.; Chirarattananon, P.; Fuller, S.B.; Wood, R.J. Controlled Flight of a Biologically Inspired, Insect-Scale Robot. Science 2013, 340, 603–607. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Karásek, M.; Muijres, F.T.; De Wagter, C.; Remes, B.D.W.; de Croon, G.C.H.E. A Tailless Aerial Robotic Flapper Reveals That Flies Use Torque Coupling in Rapid Banked Turns. Science 2018, 361, 1089–1094. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Phan, H.V.; Kang, T.; Park, H.C. Design and Stable Flight of a 21 g Insect-like Tailless Flapping Wing Micro Air Vehicle with Angular Rates Feedback Control. Bioinspir. Biomim. 2017, 12, 036006. [Google Scholar] [CrossRef]
- Phan, H.V.; Aurecianus, S.; Kang, T.; Park, H.C. KUBeetle-S: An Insect-like, Tailless, Hover-Capable Robot That Can Fly with a Low-Torque Control Mechanism. Int. J. Micro Air Veh. 2019, 11, 175682931986137. [Google Scholar] [CrossRef] [Green Version]
- Aurecianus, S.; Na, Y.S.; Vu, P.H.; Park, H.C.; Kang, T. Study of Gyroscope and Accelerometer Dynamic Characteristics on Flapping Wing Micro Aerial Vehicle. J. ICROS 2019, 25, 981–990. [Google Scholar] [CrossRef]
- Phan, H.V.; Park, H.C. Mechanisms of Collision Recovery in Flying Beetles and Flapping-Wing Robots. Science 2020, 370, 1214–1219. [Google Scholar] [CrossRef]
- Aurecianus, S.; Phan, H.V.; Kang, T.; Park, H.C. Longitudinal Mode Model-Based Controller Design for Tailless Flapping Wing Robot with Loop Shaping Compensator. Bioinspir. Biomim. 2020, 15, 056004. [Google Scholar] [CrossRef]
- Aurecianus, S.; Phan, H.V.; Park, J.; Park, H.C.; Kang, T. Lateral Mode Controller Design for Insect-like Tailless Flapping-Wing Micro Air Vehicle. J. ICROS 2021, 27, 1–10. [Google Scholar] [CrossRef]
- Coleman, D.A.; Benedict, M.; Amp, T.A.; Hrishikeshavan, V.; Chopra, I. Design, Development and Flight-Testing of a Robotic Hummingbird. In Proceedings of the AHS 71st Annual Forum, Virginia Beach, VA, USA, 5–7 May 2015. [Google Scholar]
- Roshanbin, A.; Altartouri, H.; Karásek, M.; Preumont, A. COLIBRI: A Hovering Flapping Twin-Wing Robot. Int. J. Micro Air Veh. 2017, 9, 270–282. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, Q.-V.; Chan, W.L. Development and Flight Performance of a Biologically-Inspired Tailless Flapping-Wing Micro Air Vehicle with Wing Stroke Plane Modulation. Bioinspir. Biomim. 2018, 14, 016015. [Google Scholar] [CrossRef] [PubMed]
- Tu, Z.; Fei, F.; Deng, X. Untethered Flight of an At-Scale Dual-Motor Hummingbird Robot with Bio-Inspired Decoupled Wings. IEEE Robot. Autom. Lett. 2020, 5, 4194–4201. [Google Scholar] [CrossRef]
- Keennon, M.; Grasmeyer, J. Development of Two MAVs and Vision of the Future of MAV Design. In Proceedings of the AIAA International Air and Space Symposium and Exposition: The Next 100 Years, Dayton, OH, USA, 14–17 July 2003; American Institute of Aeronautics and Astronautics: Dayton, OH, USA, 2003. [Google Scholar]
- Karásek, M.; Percin, M.; Cunis, T.; van Oudheusden, B.W.; De Wagter, C.; Remes, B.D.; de Croon, G.C. Accurate Position Control of a Flapping-Wing Robot Enabling Free-Flight Flow Visualisation in a Wind Tunnel. Int. J. Micro Air Veh. 2019, 11, 175682931983368. [Google Scholar] [CrossRef] [Green Version]
- Nguyen, Q.; Chan, W.-L.; Debiasi, M. Performance Tests of a Hovering Flapping Wing Micro Air Vehicle with Double Wing Clap-and-Fling Mechanism. In Proceedings of the International Micro Air Vehicles Conference and Flight Competition, Aachen, Germany, 15–18 September 2015. [Google Scholar]
- Park, J.H.; Yoon, K.-J. Designing a Biomimetic Ornithopter Capable of Sustained and Controlled Flight. J. Bionic Eng. 2008, 5, 39–47. [Google Scholar] [CrossRef]
- Rose, C.; Fearing, R.S. Comparison of Ornithopter Wind Tunnel Force Measurements with Free Flight. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 1816–1821. [Google Scholar]
- Folkertsma, G.A.; Straatman, W.; Nijenhuis, N.; Venner, C.H.; Stramigioli, S. Robird: A Robotic Bird of Prey. IEEE Robot. Automat. Mag. 2017, 24, 22–29. [Google Scholar] [CrossRef]
- Taylor, G.K.; Thomas, A.L.R. Animal Flight Dynamics II. Longitudinal Stability in Flapping Flight. J. Theor. Biol. 2002, 214, 351–370. [Google Scholar] [CrossRef]
- Taha, H.E.; Kiani, M.; Hedrick, T.L.; Greeter, J.S.M. Vibrational Control: A Hidden Stabilization Mechanism in Insect Flight. Sci. Robot. 2020, 5, eabb1502. [Google Scholar] [CrossRef]
- Benrabah, M.; Kara, K.; AitSahed, O.; Hadjili, M.L. Adaptive Fourier Series Neural Network PID Controller. Int. J. Control Autom. Syst. 2021, 19, 3388–3399. [Google Scholar] [CrossRef]
- Freire, H.; Moura Oliveira, P.B.; Solteiro Pires, E.J. From Single to Many-Objective PID Controller Design Using Particle Swarm Optimization. Int. J. Control Autom. Syst. 2017, 15, 918–932. [Google Scholar] [CrossRef]
- Du, H.; Hu, X.; Ma, C. Dominant Pole Placement with Modified PID Controllers. Int. J. Control Autom. Syst. 2019, 17, 2833–2838. [Google Scholar] [CrossRef]
- Memon, F.; Shao, C. An Optimal Approach to Online Tuning Method for PID Type Iterative Learning Control. Int. J. Control Autom. Syst. 2020, 18, 1926–1935. [Google Scholar] [CrossRef]
- Pongfai, J.; Angeli, C.; Shi, P.; Su, X.; Assawinchaichote, W. Optimal PID Controller Autotuning Design for MIMO Nonlinear Systems Based on the Adaptive SLP Algorithm. Int. J. Control Autom. Syst. 2021, 19, 392–403. [Google Scholar] [CrossRef]
- Fadaei, A.; Salahshoor, K. A Novel Real-Time Fuzzy Adaptive Auto-Tuning Scheme for Cascade PID Controllers. Int. J. Control Autom. Syst. 2011, 9, 823–833. [Google Scholar] [CrossRef]
- Nguyen, A.T.; Han, J.-H. Wing Flexibility Effects on the Flight Performance of an Insect-like Flapping-Wing Micro-Air Vehicle. Aerosp. Sci. Technol. 2018, 79, 468–481. [Google Scholar] [CrossRef]
- Nguyen, K.; Au, L.T.K.; Phan, H.-V.; Park, S.H.; Park, H.C. Effects of Wing Kinematics, Corrugation, and Clap-and-Fling on Aerodynamic Efficiency of a Hovering Insect-Inspired Flapping-Wing Micro Air Vehicle. Aerosp. Sci. Technol. 2021, 118, 106990. [Google Scholar] [CrossRef]
- Nan, Y.; Peng, B.; Chen, Y.; Feng, Z.; McGlinchey, D. Can Scalable Design of Wings for Flapping Wing Micro Air Vehicle Be Inspired by Natural Flyers? Int. J. Aerosp. Eng. 2018, 2018, 9538328. [Google Scholar] [CrossRef]
- Nan, Y.; Karásek, M.; Lalami, M.E.; Preumont, A. Experimental Optimization of Wing Shape for a Hummingbird-like Flapping Wing Micro Air Vehicle. Bioinspir. Biomim. 2017, 12, 026010. [Google Scholar] [CrossRef] [PubMed]
- Taha, H.E.; Hajj, M.R.; Nayfeh, A.H. Flight Dynamics and Control of Flapping-Wing MAVs: A Review. Nonlinear Dyn. 2012, 70, 907–939. [Google Scholar] [CrossRef]
- Orlowski, C.T.; Girard, A.R. Dynamics, Stability, and Control Analyses of Flapping Wing Micro-Air Vehicles. Prog. Aerosp. Sci. 2012, 51, 18–30. [Google Scholar] [CrossRef]
- Khan, Q.; Akmeliawati, R. Review on System Identification and Mathematical Modeling of Flapping Wing Micro-Aerial Vehicles. Appl. Sci. 2021, 11, 1546. [Google Scholar] [CrossRef]
- Kajak, K.M.; Karásek, M.; Chu, Q.P.; de Croon, G.C.H.E. A Minimal Longitudinal Dynamic Model of a Tailless Flapping Wing Robot for Control Design. Bioinspir. Biomim. 2019, 14, 046008. [Google Scholar] [CrossRef] [PubMed]
- Deng, X.; Schenato, L.; Sastry, S.S. Flapping Flight for Biomimetic Robotic Insects: Part II-Flight Control Design. IEEE Trans. Robot. 2006, 22, 789–803. [Google Scholar] [CrossRef]
- Rifaï, H.; Marchand, N.; Poulin-Vittrant, G. Bounded Control of an Underactuated Biomimetic Aerial Vehicle—Validation with Robustness Tests. Robot. Auton. Syst. 2012, 60, 1165–1178. [Google Scholar] [CrossRef] [Green Version]
- Tahmasian, S.; Woolsey, C.A.; Taha, H.E. Longitudinal Flight Control of Flapping Wing Micro Air Vehicles. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, National Harbor, MD, USA, 13–17 January 2014; American Institute of Aeronautics and Astronautics: National Harbor, MD, USA, 2014. [Google Scholar]
- Zhang, J.; Tu, Z.; Fei, F.; Deng, X. Geometric flight control of a hovering robotic hummingbird. In Proceedings of the 2017 IEEE International Conference on Robotics and Automation (ICRA), Singapore, 29 May–3 June 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 5415–5421. [Google Scholar] [CrossRef]
- Rakotomamonjy, T.; Ouladsine, M.; Moing, T.L. Longitudinal Modelling and Control of a Flapping-Wing Micro Aerial Vehicle. Control Eng. Pract. 2010, 18, 679–690. [Google Scholar] [CrossRef]
- Serrani, A. Robust Nonlinear Control Design for a Minimally-Actuated Flapping-Wing MAV in the Longitudinal Plane. In Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 7464–7469. [Google Scholar]
- Tran, X.-T.; Oh, H.; Kim, I.-R.; Kim, S. Attitude Stabilization of Flapping Micro-Air Vehicles via an Observer-Based Sliding Mode Control Method. Aerosp. Sci. Technol. 2018, 76, 386–393. [Google Scholar] [CrossRef]
- Banazadeh, A.; Taymourtash, N. Adaptive Attitude and Position Control of an Insect-like Flapping Wing Air Vehicle. Nonlinear Dyn. 2016, 85, 47–66. [Google Scholar] [CrossRef]
- Alkitbi, M.; Serrani, A. Robust Control of a Flapping-Wing MAV by Differentiable Wingbeat Modulation. IFAC-PapersOnLine 2016, 49, 290–295. [Google Scholar] [CrossRef]
- Lee, J.; Ryu, S.; Kim, H.J. Stable Flight of a Flapping-Wing Micro Air Vehicle Under Wind Disturbance. IEEE Robot. Autom. Lett. 2020, 5, 5685–5692. [Google Scholar] [CrossRef]
- He, W.; Mu, X.; Zhang, L.; Zou, Y. Modeling and Trajectory Tracking Control for Flapping-Wing Micro Aerial Vehicles. IEEE/CAA J. Autom. Sin. 2021, 8, 148–156. [Google Scholar] [CrossRef]
- He, W.; Yan, Z.; Sun, C.; Chen, Y. Adaptive Neural Network Control of a Flapping Wing Micro Aerial Vehicle With Disturbance Observer. IEEE Trans. Cybern. 2017, 47, 3452–3465. [Google Scholar] [CrossRef]
- Cheng, B.; Deng, X. A Neural Adaptive Controller in Flapping Flight. J. Robot. Mechatron. 2012, 24, 602–611. [Google Scholar] [CrossRef]
- Khosravi, M.; Novinzadeh, A.B. A multi-body control approach for flapping wing micro aerial vehicles. Aerosp. Sci. Technol. 2021, 112, 106525. [Google Scholar] [CrossRef]
- Finio, B.M.; Pérez-Arancibia, N.O.; Wood, R.J. System Identification and Linear Time-Invariant Modeling of an Insect-Sized Flapping-Wing Micro Air Vehicle. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 1107–1114. [Google Scholar] [CrossRef]
- Nijboer, J.; Armanini, S.F.; Karasek, M.; de Visser, C.C. Longitudinal Grey-Box Model Identification of a Tailless Flapping-Wing MAV Based on Free-Flight Data. In Proceedings of the AIAA Scitech 2020 Forum, Orlando, FL, USA, 6 January 2020; American Institute of Aeronautics and Astronautics: Orlando, FL, USA, 2020. [Google Scholar]
- Klein, V.; Morelli, E.A. Aircraft System Identification: Theory and Practice; AIAA education series; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2006; ISBN 1-56347-832-3. [Google Scholar]
- Ljung, L. System Identification: Theory for the User, 2nd ed.; Prentice Hall Information and System Sciences Series; Prentice Hall PTR: Upper Saddle River, NJ, USA, 1999; ISBN 978-0-13-656695-3. [Google Scholar]
- Hoffer, N.V.; Coopmans, C.; Jensen, A.M.; Chen, Y. A Survey and Categorization of Small Low-Cost Unmanned Aerial Vehicle System Identification. J. Intell. Robot. Syst. 2014, 74, 129–145. [Google Scholar] [CrossRef]
- Landau, I.D. Identification in Closed Loop: A Powerful Design Tool (Better Design Models, Simpler Controllers). Control Eng. Pract. 2001, 9, 51–65. [Google Scholar] [CrossRef]
- Gustavsson, I.; Ljung, L.; Söderström, T. Identification of Processes in Closed Loop—Identifiability and Accuracy Aspects. Automatica 1977, 13, 59–75. [Google Scholar] [CrossRef] [Green Version]
- Phan, H.V.; Aurecianus, S.; Au, T.K.L.; Kang, T.; Park, H.C. Towards the Long-Endurance Flight of an Insect-Inspired, Tailless, Two-Winged, Flapping-Wing Flying Robot. IEEE Robot. Autom. Lett. 2020, 5, 5059–5066. [Google Scholar] [CrossRef]
- Phan, H.; Aurecianus, S.; Kang, T.; Park, H.C. Attitude Control Mechanism in an Insect-like Tailless Two-Winged Flying Robot by Simultaneous Modulation of Stroke Plane and Wing Twist. In Proceedings of the International Micro Air Vehicle Conference and Competition, Melbourne, Australia, 17–23 November 2018. [Google Scholar]
- Nguyen, T.A.; Vu Phan, H.; Au, T.K.L.; Park, H.C. Experimental Study on Thrust and Power of Flapping-Wing System Based on Rack-Pinion Mechanism. Bioinspir. Biomim. 2016, 11, 046001. [Google Scholar] [CrossRef]
- Karásek, M.; Preumont, A. Simulation of Flight Control of a Hummingbird Like Robot Near Hover. In Proceedings of the 18th International Conference Engineering Mechanics, Svratka, Czech Republic, 14–17 May 2012. [Google Scholar]
- Au, L.T.K.; Phan, V.H.; Park, H.C. Longitudinal Flight Dynamic Analysis on Vertical Takeoff of a Tailless Flapping-Wing Micro Air Vehicle. J. Bionic Eng. 2018, 15, 283–297. [Google Scholar] [CrossRef]
- Au, L.T.K.; Park, H.C. Influence of Center of Gravity Location on Flight Dynamic Stability in a Hovering Tailless FW-MAV: Longitudinal Motion. J. Bionic Eng. 2019, 16, 130–144. [Google Scholar] [CrossRef]
- Nguyen, K.; Au, L.T.K.; Phan, H.-V.; Park, H.C. Comparative Dynamic Flight Stability of Insect-Inspired Flapping-Wing Micro Air Vehicles in Hover: Longitudinal and Lateral Motions. Aerosp. Sci. Technol. 2021, 119, 107085. [Google Scholar] [CrossRef]
- Björck, Å. Numerical Methods for Least Squares Problems; Society for Industrial and Applied Mathematics: Philadelphia, PA, USA, 1996; ISBN 978-0-89871-360-2. [Google Scholar]
- Lourakis, M.I.A. A Brief Description of the Levenberg-Marquardt Algorithm Implemented by Levmar. Found. Res. Technol. 2005, 4, 1–6. [Google Scholar]
- Gavin, H.P. The Levenberg-Marquardt Method for Nonlinear Least Squares Curve-Fitting Problems; Duke University: Durham, NC, USA, 2020. [Google Scholar]










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| [] | [] | [] | [] | [] | [] |
| [] | [] | [] | [] | [] | [] |
| Identification Method | Characteristics |
|---|---|
| GNA | The adaptive subspace Gauss–Newton search method. |
| This minimizes the objective function, which is the sum of squared errors that is approximately quadratic in the parameters near the optimal solution. | |
| Convergence is not guaranteed, and it might converge only to a local optimum, depending on the starting parameters. | |
| LM | The Levenberg–Marquardt least square search method. |
| This updates the parameters by adaptively combining the Gauss–Newton and gradient descent approaches, depending on the parameter errors. | |
| This is a refinement to the Gauss–Newton search method that improves the chance of local convergence and prevents divergence. | |
| This method is more robust than the Gauss–Newton and gradient descent search methods. | |
| GRAD | The Steepest descent or Gradient descent search method. |
| This updates the parameters towards the largest directional derivative or negative gradient direction of the objective function to reduce the sum of squared errors. | |
| When close to minimum, the iteration process becomes relatively slow. |
| Parameters | CFD (Initial) | Identified Dynamic Model | ||||||
|---|---|---|---|---|---|---|---|---|
| GNA 1 | LM 1 | GRAD 1 | GNA 2 | LM 2 | GRAD 2 | Average | ||
| −1.351 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | 0.000 | |
| 0.060 | 0.001 | 0.000 | 0.000 | 0.000 | 0.028 | 0.000 | 0.005 | |
| −66.755 | −79.656 | −79.870 | −75.722 | −87.300 | −99.508 | −83.732 | −84.298 | |
| 0.016 | 4.237 | 4.237 | 4.237 | 4.237 | 4.237 | 4.237 | 4.237 | |
| −0.756 | −1.464 | −1.742 | −1.645 | −1.268 | −1.113 | −1.646 | −1.480 | |
| −1.287 | −1.126 | −1.126 | −1.126 | −1.126 | −1.227 | −1.126 | −1.143 | |
| 0.035 | 0.294 | 0.560 | 0.347 | −0.044 | −0.058 | −0.002 | 0.183 | |
| 0.006 | 0.006 | 0.006 | 0.006 | 0.006 | 0.006 | 0.006 | 0.006 | |
| −0.499 | −7.715 | −1.532 | −3.622 | −6.470 | −7.467 | −4.460 | −5.211 | |
| 7.458 | 16.553 | 20.746 | 21.329 | 12.767 | 9.796 | 18.457 | 16.608 | |
| −1.147 | −11.333 | −14.579 | −14.826 | −8.953 | −7.405 | −13.671 | −11.795 | |
| 1109.171 | 1015.702 | 1092.554 | 1108.319 | 1016.950 | 1058.045 | 1107.437 | 1066.501 | |
| Fit Percentage | 21.982 | 49.090 | 48.640 | 49.920 | 45.110 | 43.180 | 46.520 | 48.300 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Aurecianus, S.; Ha, G.-H.; Park, H.-C.; Kang, T.-S. Longitudinal Mode System Identification of an Insect-like Tailless Flapping-Wing Micro Air Vehicle Using Onboard Sensors. Appl. Sci. 2022, 12, 2486. https://doi.org/10.3390/app12052486
Aurecianus S, Ha G-H, Park H-C, Kang T-S. Longitudinal Mode System Identification of an Insect-like Tailless Flapping-Wing Micro Air Vehicle Using Onboard Sensors. Applied Sciences. 2022; 12(5):2486. https://doi.org/10.3390/app12052486
Chicago/Turabian StyleAurecianus, Steven, Gi-Heon Ha, Hoon-Cheol Park, and Tae-Sam Kang. 2022. "Longitudinal Mode System Identification of an Insect-like Tailless Flapping-Wing Micro Air Vehicle Using Onboard Sensors" Applied Sciences 12, no. 5: 2486. https://doi.org/10.3390/app12052486
APA StyleAurecianus, S., Ha, G.-H., Park, H.-C., & Kang, T.-S. (2022). Longitudinal Mode System Identification of an Insect-like Tailless Flapping-Wing Micro Air Vehicle Using Onboard Sensors. Applied Sciences, 12(5), 2486. https://doi.org/10.3390/app12052486