
Modelling Automated Planning Problems for Teams of Mobile Manipulators in a Generic Industrial Scenario


Abstract
:1. Introduction
2. Related Work
2.1. Competitions
2.1.1. RoboCup@Work
2.1.2. RoboCup Logistics League
2.2. Research Projects
3. Materials and Methods
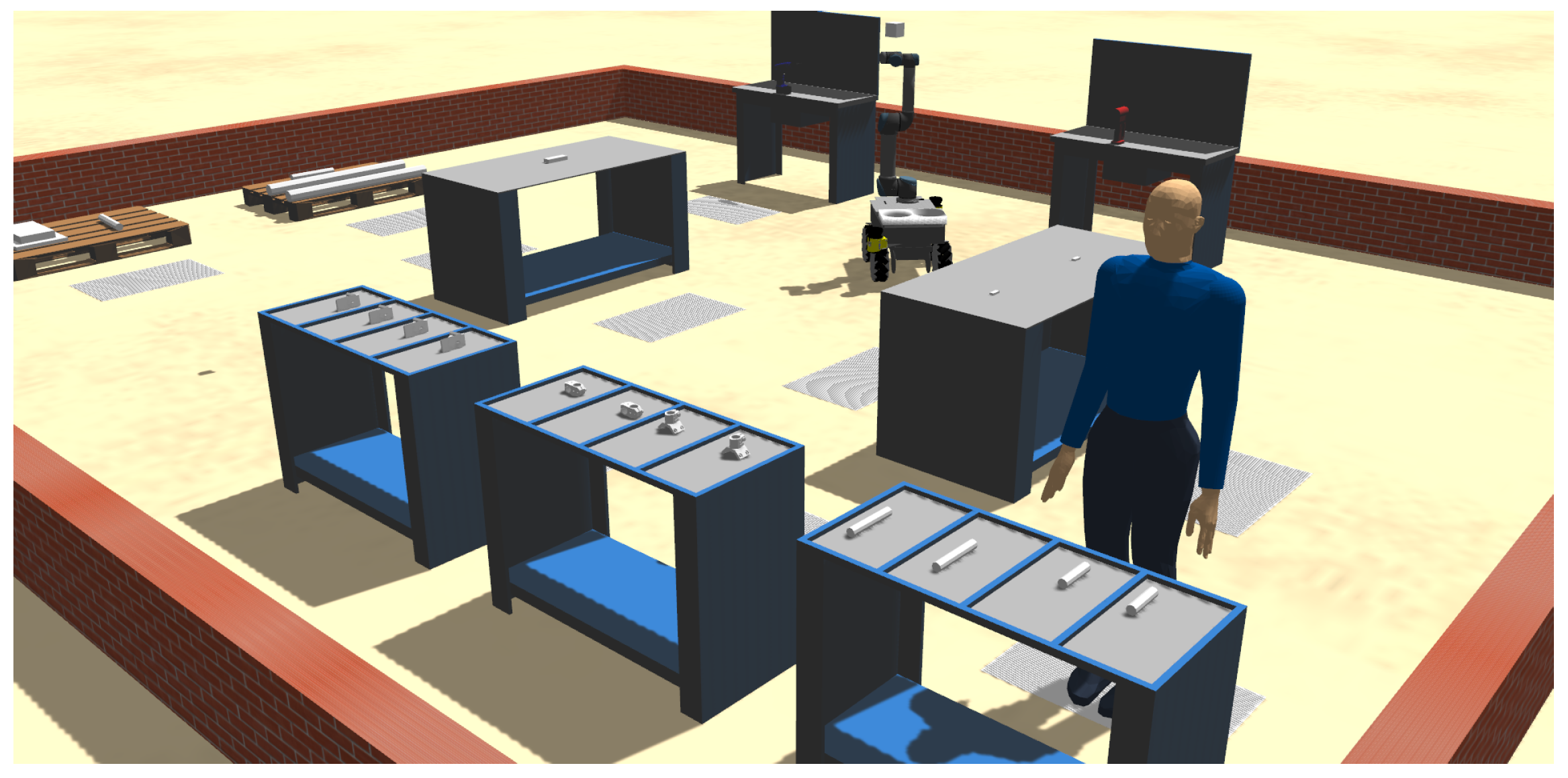
3.1. Modelling a Generic Industrial Scenario (GIS)
3.1.1. Actors Modelling
- navigate: This action allows an actor to navigate between two poses;
- grasp/place: This action allows an actor to grasp/place an item or a tool from/to a known location from the environment, from itself, or from another actor;
- fetch/discard: This action allows an actor to fetch/discard an item or a tool from the environment with an unknown location;
- connect: This action allows an actor to connect two items from the environment;
- manipulate: This type of action allows an actor to manipulate and process items from the environment. Possible manipulation actions are: screw, press_button, etc.;
- collaboration: This type of action allows two actors to collaborate when executing one action.
3.1.2. Environment Modelling
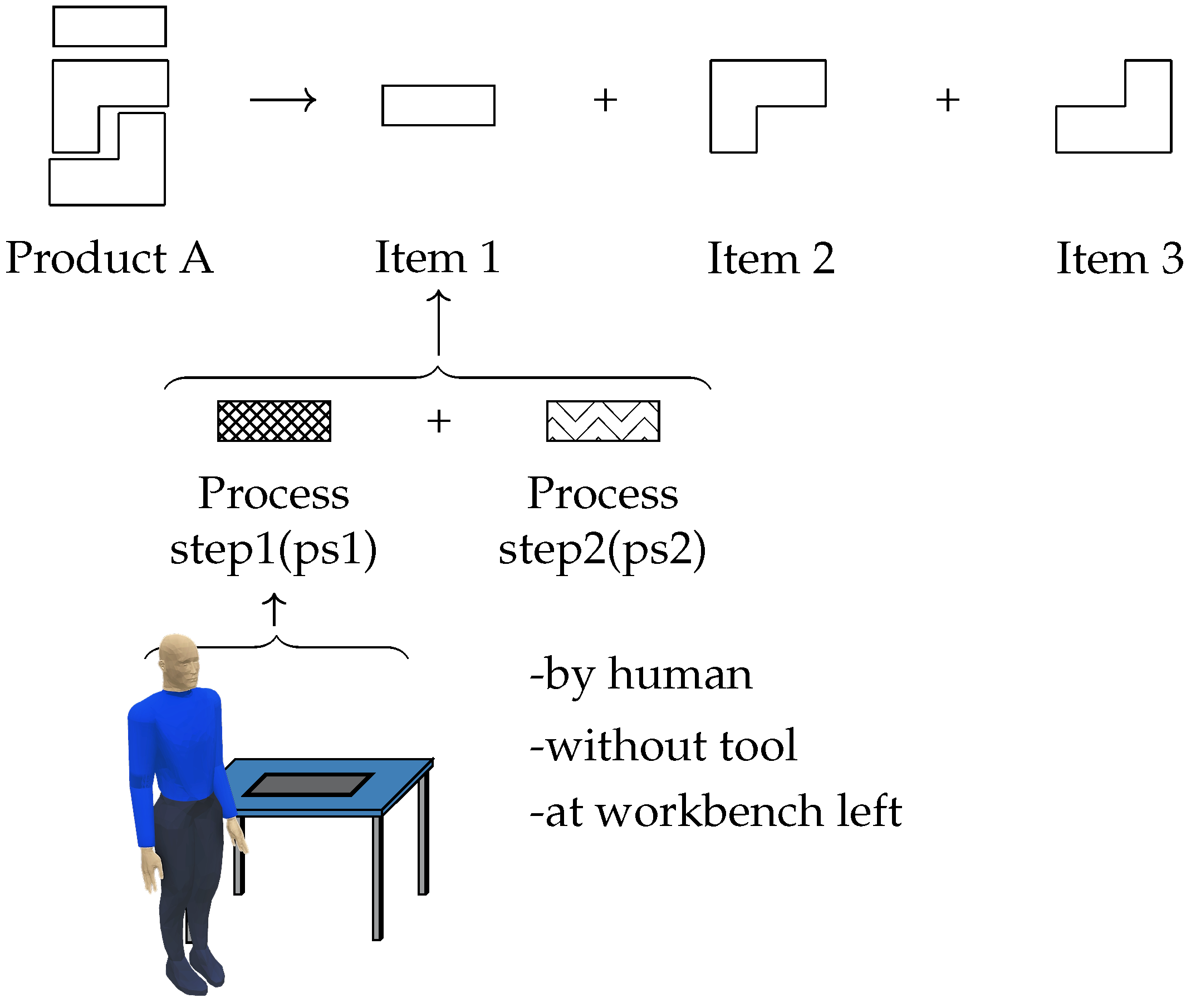
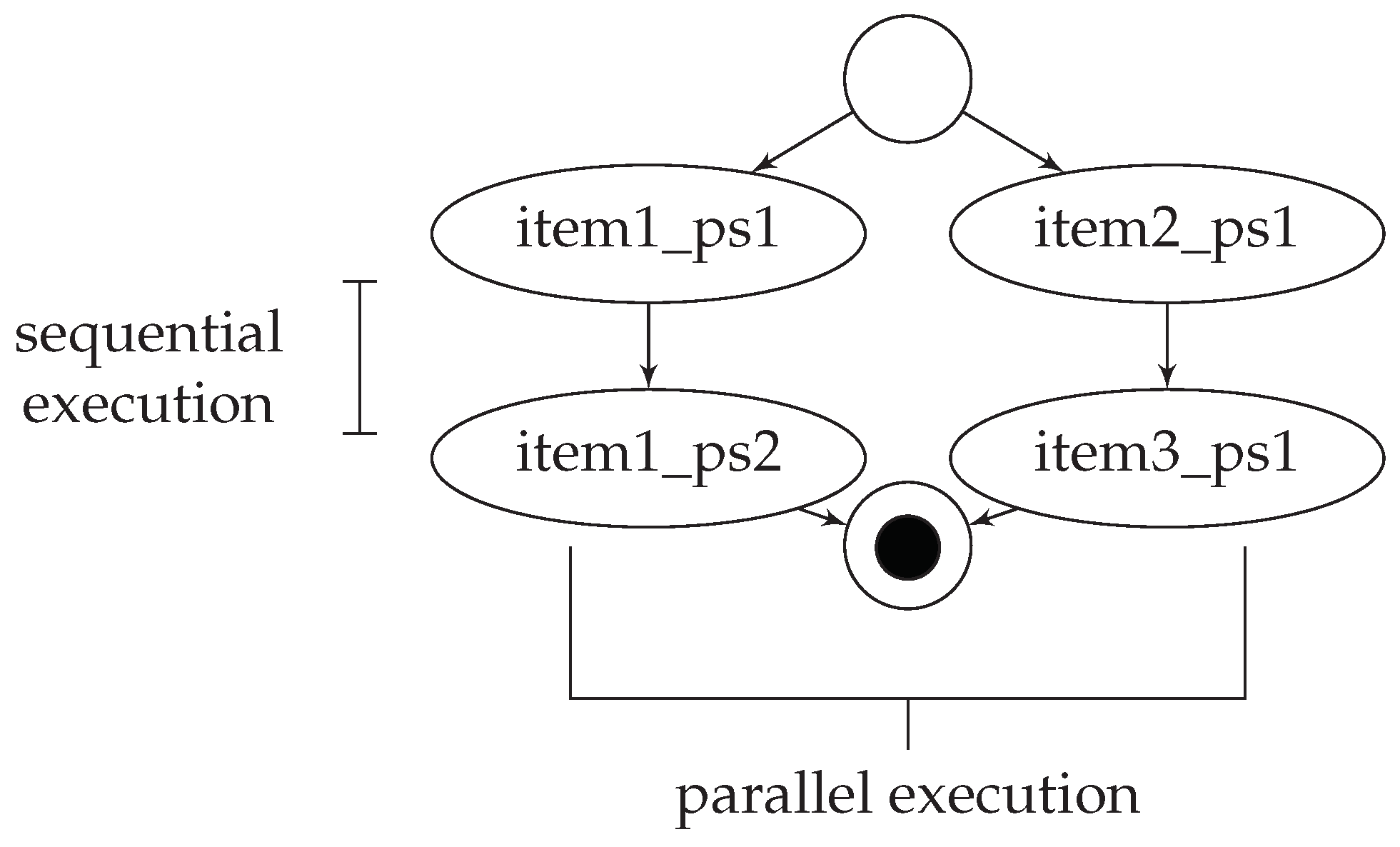
3.1.3. Processes Modelling
3.2. The Generic Planning Problem (GPP) for the GIS and Its Instances in PDDL
3.2.1. PDDL Domain for the Generic Planning Problem (GPP)
3.2.2. PDDL Domain for an Instance of the Generic Planning Problem (IGPP)
3.2.3. PDDL Problem for an Instance of the Generic Planning Problem (IGPP)
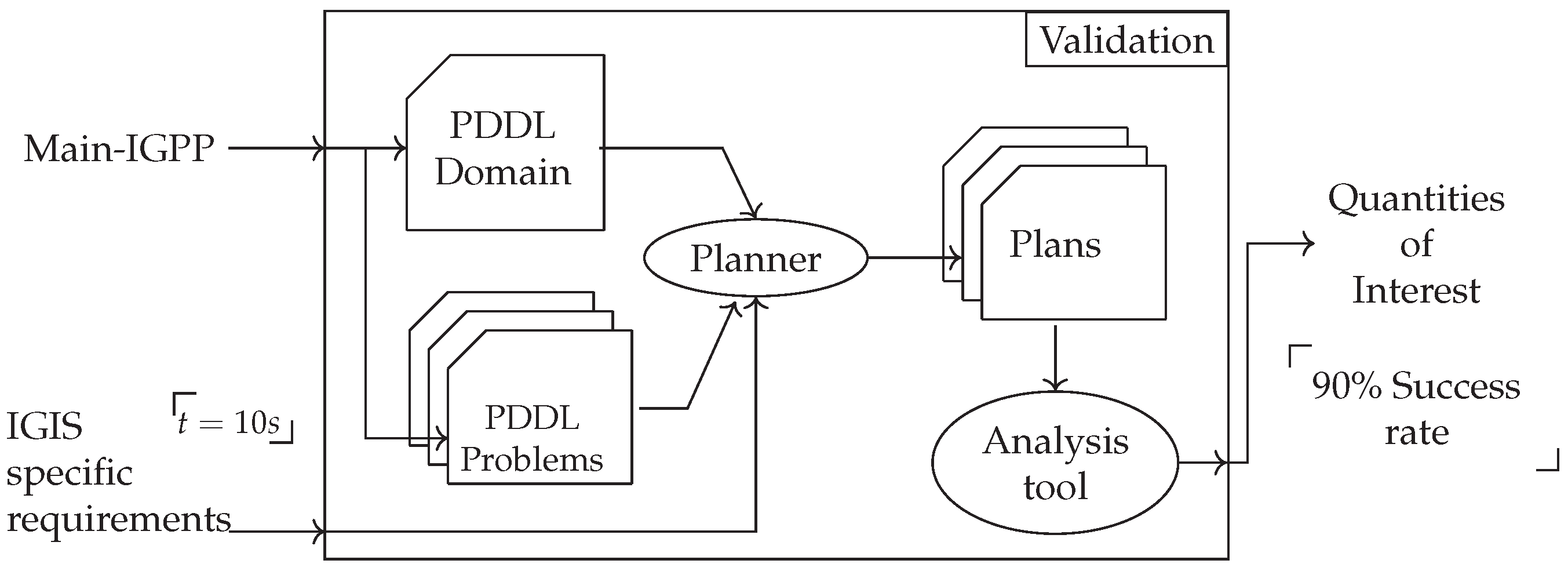
3.3. Validation Methodology for a Main Instance of the Generic Planning Problem (IGPP)
3.3.1. Scene Initial States for a Main Instance of the Generic Planning Problem (IGPP)
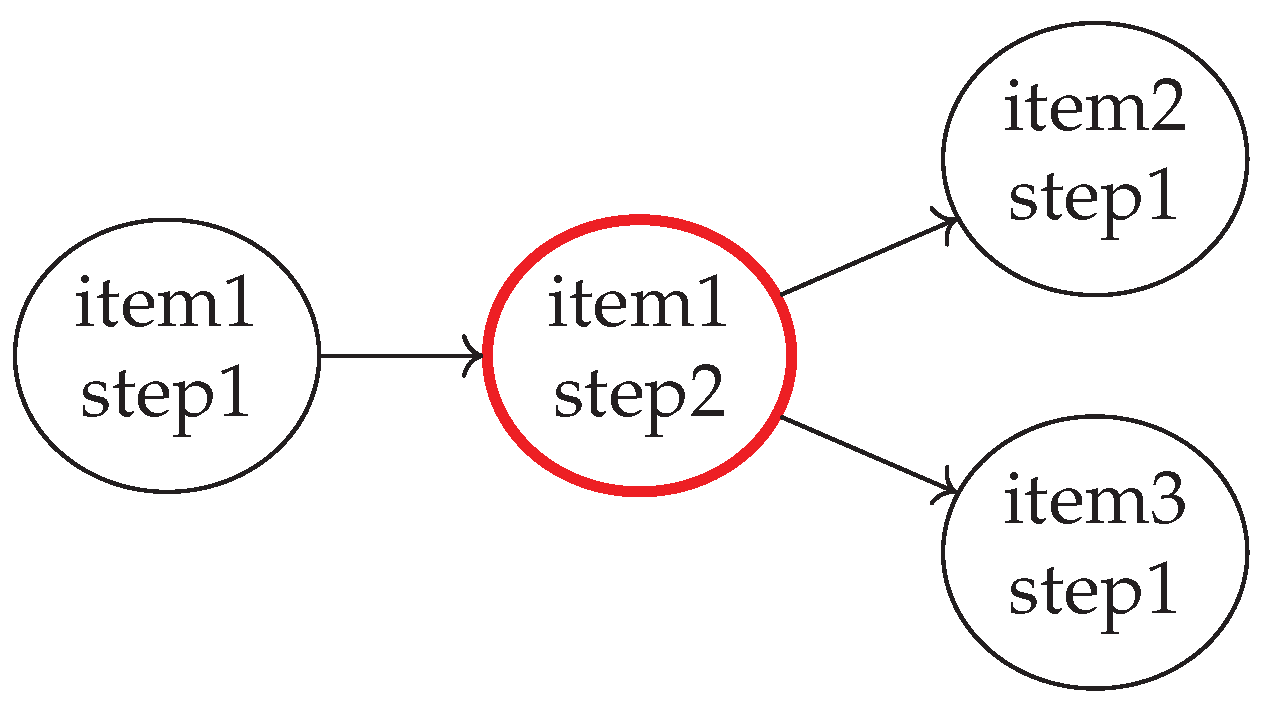
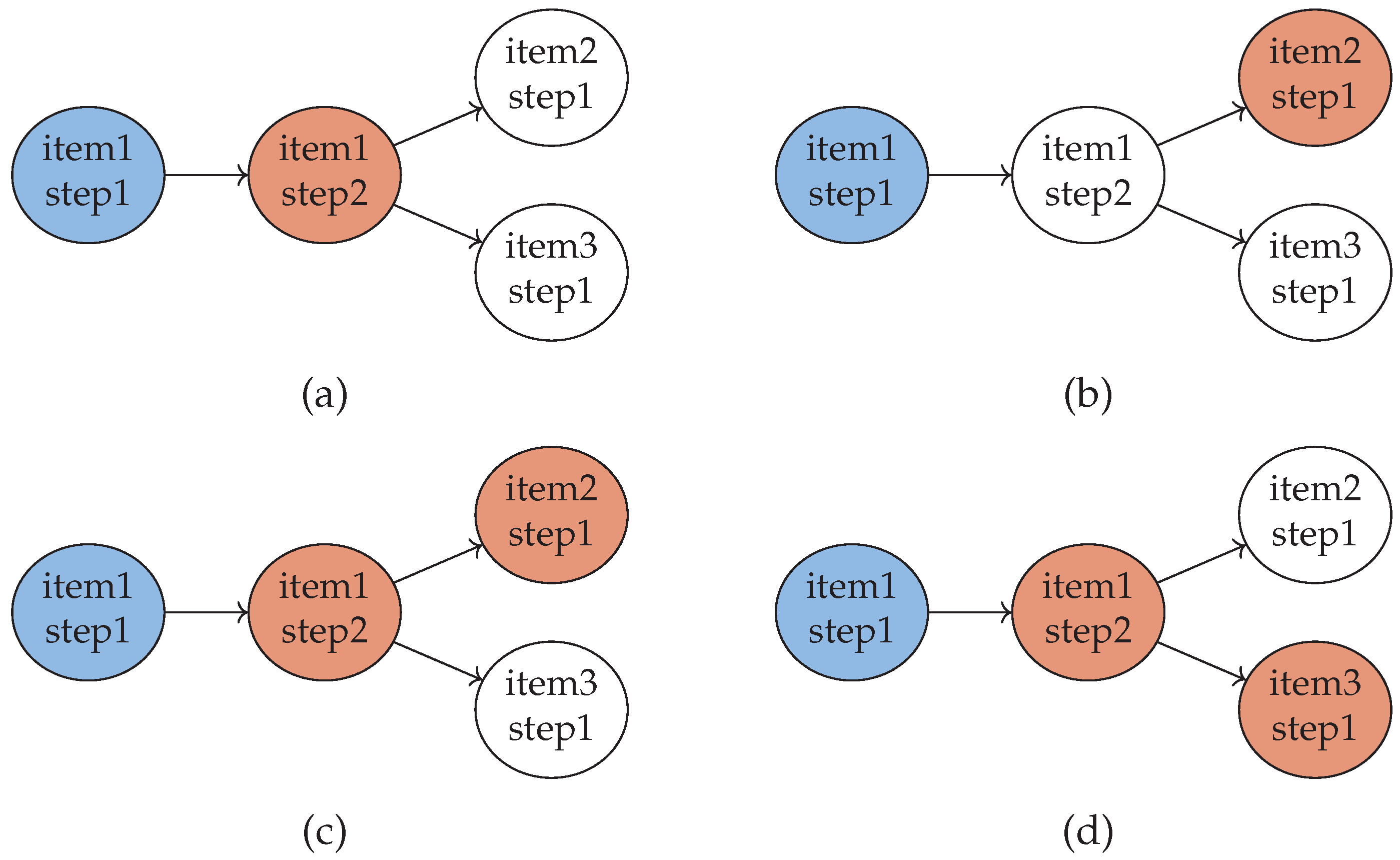
3.3.2. Process Steps Initial States and Process Steps Goals for a Main Instance of the Generic Planning Problem (IGPP)
| Algorithm 1: Algorithm for generating dependency sub-graphs (DsGs) from a DG. |
 |
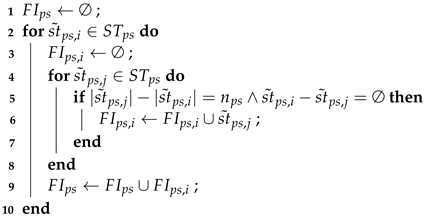
| Algorithm 2: Algorithm for generating finish-process-steps sets for a given set of start-process-steps sets. |
 |
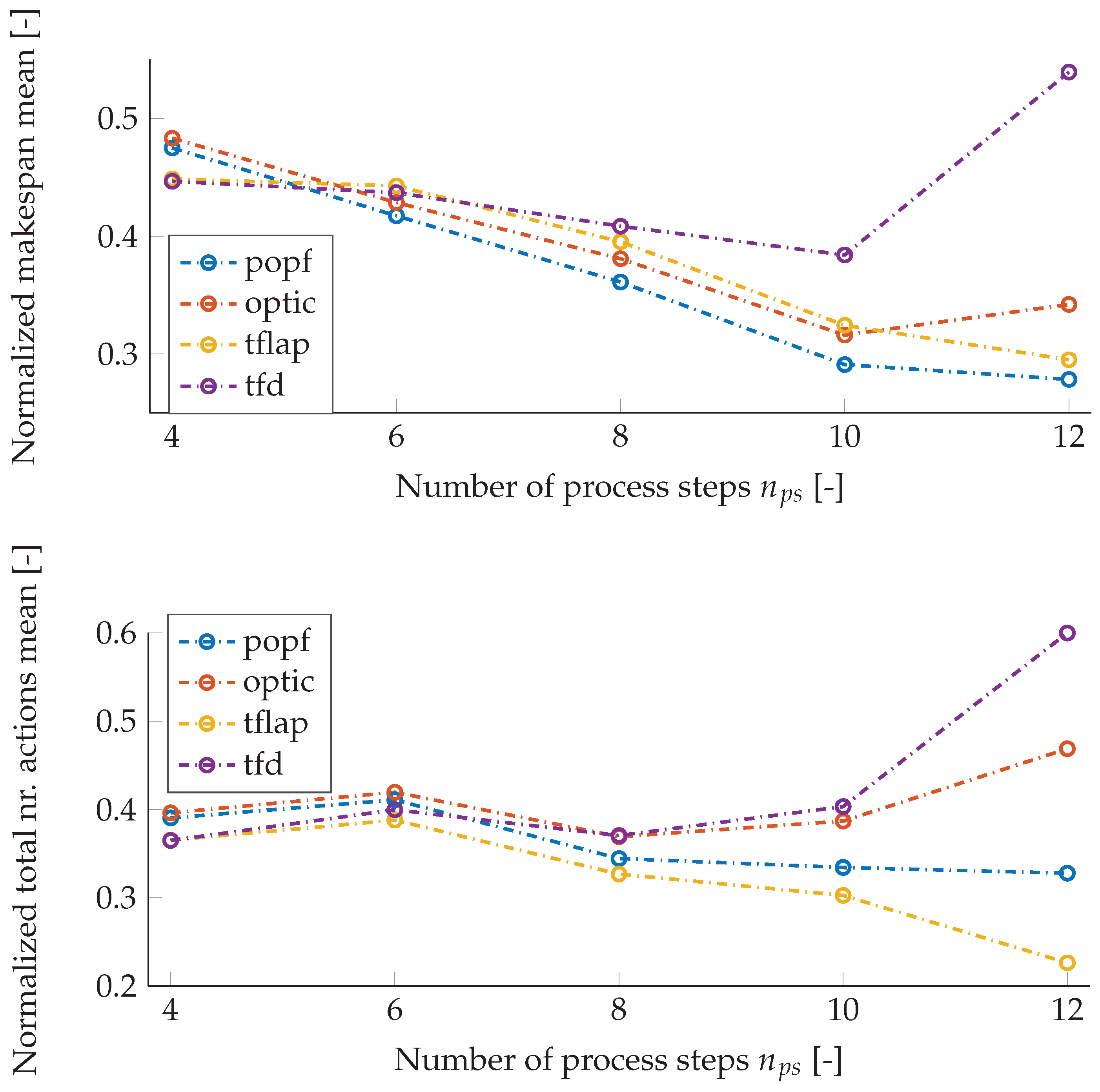
4. Results
- solvability: Whether a solution was found in the timeout period of 10 s;
- makespan: If a solution was found, the makespan (latest end time of the actions from a plan) of the plan was determined;
- nr_actions: If a solution was found, the number of actions of that plan was determined.
- QoI 1: Percentage of solved situational IGPPs;
- QoI 2: The mean of the plans’ makespans;
- QoI 3: The mean of the plans’ numbers of actions.
5. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| AI | artificial intelligence |
| bfs | breadth first search |
| BT | behaviour trees |
| DG | dependency graph |
| DsG | dependency sub-graph |
| FSM | finite state machine |
| FSMs | finite state machines |
| GIS | generic industrial scenario |
| GPP | generic planning problem |
| HTN | hierarchical task network |
| IGIS | instance of the generic industrial scenario |
| IGISs | instances of the generic industrial scenario |
| IGPP | instance of the generic planning problem |
| IGPPs | instances of the generic planning problem |
| PDDL | Planning Domain Definition Language |
| QoI | quantity of interest |
| QoIs | quantities of interest |
Appendix A. Dependency Graph of an IGPP

References
- Bezrucav, S.O.; Corves, B. Improved AI Planning for Cooperating Teams of Humans and Robots. In Proceedings of the Workshop on Planning and Robotics (PlanRob) at the International Conference on Automated Planning and Scheduling (ICAPS), Nancy, France, 26–30 October 2020. [Google Scholar] [CrossRef]
- Wally, B.; Vyskocil, J.; Novak, P.; Huemer, C.; Sindelar, R.; Kadera, P.; Mazak, A.; Wimmer, M. Production Planning with IEC 62264 and PDDL. In Proceedings of the 17th International Conference on Industrial Informatics (INDIN), Helsinki, Finland, 22–25 July 2019; pp. 492–499. [Google Scholar] [CrossRef]
- Kootbally, Z.; Schlenoff, C.; Lawler, C.; Kramer, T.; Gupta, S.K. Towards robust assembly with knowledge representation for the planning domain definition language (PDDL). Robot. Comput.-Integr. Manuf. 2015, 33, 42–55. [Google Scholar] [CrossRef]
- Foderaro, E.; Cesta, A.; Umbrico, A.; Orlandini, A. Simplifying the AI Planning modeling for Human-Robot Collaboration. In Proceedings of the 30th IEEE International Conference on Robot & Human Interactive Communication (RO-MAN), Vancouver, BC, Canada, 8–12 August 2021; pp. 1011–1016. [Google Scholar] [CrossRef]
- Ghallab, M.; Dana, N.; Traverso, P. Automated Planning and Acting; Cambridge University Press: Cambridge, UK, 2016. [Google Scholar]
- Iovino, M.; Scukins, E.; Styrud, J.; Ögren, P.; Smith, C. A Survey of Behavior Trees in Robotics and AI. arXiv 2020, arXiv:2005.05842. [Google Scholar]
- RoboCup Federation. RoboCup Logistics League. Available online: https://ll.robocup.org/home/ (accessed on 1 February 2022).
- Zug, S.; Niemueller, T.; Hochgeschwender, N.; Seidensticker, K.; Seidel, M.; Friedrich, T.; Neumann, T.; Karras, U.; Kraetzschmar, G.K.; Alexander, F. An Integration Challenge to Bridge the Gap Among Industry-Inspired RoboCup Leagues. In RoboCup 2016: Robot World Cup XX; Behnke, S., Sheh, R., Sarıel, S., Lee, D.D., Eds.; Number 9776; Springer International Publishing: Berlin/Heidelberg, Germany, 2017; pp. 157–168. [Google Scholar]
- Norouzi, A.; Zug, S.; Martin, J.; Nair, D.; Steup, C. RoboCup@Work 2020—Rulebook. 2020. Available online: https://robocup-lyontech.github.io/assets/pdf/Rulebook_robocup_2020-11-25.pdf (accessed on 1 February 2022).
- Kraetzschmar, G.K.; Hochgeschwender, N.; Nowak, W.; Hegger, F.; Schneider, S.; Dwiputra, R.; Berghofer, J.; Bischoff, R. RoboCup@Work: Competing for the Factory of the Future. In RoboCup 2014: Robot World Cup XVIII; Bianchi, R.A.C., Akin, H.L., Ramamoorthy, S., Sugiura, K., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 171–182. [Google Scholar]
- Martin, J.; Ammon, D.; Engelhardt, H.; Fink, T.; Gramß, F.; Gsell, A.; Heigl, D.; Koch, P.; Masannek, M. Team Description Paper—Team AutonOHM. 2016. Available online: https://www.th-nuernberg.de/fileadmin/fakultaeten/efi/efi_bilder/Labore/RoboCup/AutonOHM%40Work_Team_Description_Paper-TDP-2016.pdf (accessed on 1 February 2022).
- Rostami, V.; Mansournia, P.; Ghaziakar, A.; Hamzeh, A.; Jalili, F.; Dostar, M. ATISbots Team Description Paper. 2020. Available online: https://www.researchgate.net/publication/339500818_ATISbots_RoboCupWork_2020_Team_Description_Paper (accessed on 1 February 2022).
- Katz, M.; Hoffmann, J. Pushing the Limits of Partial Delete Relaxation: Red-Black DAG Heuristics. 2014. Available online: https://www.robocup2017.org/file/symposium/atWork/tdp_b-it-bots_atwork_2017.pdf (accessed on 1 February 2022).
- Jandt, T.; Kulkarni, P.; Mayoral, J.C.; Nair, D.; Senga, B.N.; Thoduka, S.; Awaad, I.; Hochgeschwender, N.; Schneider, S.; Kraetzschmar, G.K. b-it-bots Team Description Paper. 2017. Available online: https://fai.cs.uni-saarland.de/katz/papers/ipc2014a.pdf (accessed on 1 February 2022).
- Steup, C.; Seidel, M.; Busse, P.; Harder, N.; Hoyer, L.; Jorges, G.; Jose, J.C.; Kopton, J.; Koring, A.; Labitzke, F.; et al. Team Description Paper robOTTO. 2019. Available online: https://www.robotto.ovgu.de/robotto_media/Downloads/TDPs/tdp_robotto_2019.pdf (accessed on 1 February 2022).
- Festo. Robotino—Forschen und Lernen mit Robotern. Available online: https://www.festo-didactic.com/int-en/highlights/qualification-for-industry-4.0/robotino-4/?fbid=aW50LmVuLjU1Ny4xNy4xMC44MjU1LjQ1NTg (accessed on 1 February 2022).
- Vincent, C.; Deppe, C.; Gomaa, M.; Hofmann, T.; Karras, U.; Niemueller, T.; Rohr, A.; Ulz, T. The RoboCup Logistics League. Available online: https://github.com/robocup-logistics/rcll-rulebook/releases/download/2019/rulebook2019.pdf (accessed on 1 February 2022).
- Kohout, P.; de Bortoli, M.; Ludwiger, J.; Ulz, T.; Steinbauer, G. A multi-robot architecture for the RoboCup Logistics League. Elektrotech. Informationstech. 2020, 137, 291–296. [Google Scholar] [CrossRef]
- Hofmann, T.; Limpert, N.; Mataré, V.; Schönitz, S.; Niemueller, T.; Ferrein, A.; Lakemeyer, G. The Carologistics RoboCup Logistics Team 2018. 2018. Available online: https://ll.robocup.org/wp-content/uploads/2018/11/carologistics-2018-tdp.pdf (accessed on 1 February 2022).
- Niemueller, T.; Hofmann, T.; Lakemeyer, G. Goal Reasoning in the CLIPS Executive for Integrated Planning and Execution. In Proceedings of the Twenty-Ninth International Conference on Automated Planning and Scheduling, Berkeley, CA, USA, 11–15 July 2019; Smith, D.E., Srivastava, S., Eds.; AAAI Press: Palo Alto, CA, USA, 2019; pp. 754–763. [Google Scholar]
- Steup, C.; Seidel, M.; Bartsch, L.; Brockhage, I.; Harder, N.; Harriehausen, N.; Jorges, G.; Klobertanz, A.; Koring, A.; Labitzke, F.; et al. Team Description Paper robOTTO. 2020. Available online: https://www.robotto.ovgu.de/robotto_media/Downloads/TDPs/tdp_robotto_2020.pdf (accessed on 1 February 2022).
- Scholz, M.; Sessner, J.; Eith, F.; Zwingel, M.; Merbele, S.; Gruendel, L.; Garbe, V.; Reitelshoefer, S.; Franke, J. The ER-Force RoboCup Logistics League Team 2018. 2018. Available online: https://ll.robocup.org/wp-content/uploads/2018/11/TDP-ER-Force-LogisticsLeague-2018.pdf (accessed on 1 February 2022).
- Rohr, A.; Brandenberger, S. Description of Team Solidus 2018. 2018. Available online: https://ll.robocup.org/wp-content/uploads/2018/11/Team_Solidus_TDP_2018_eng.pdf (accessed on 1 February 2022).
- De Bortoli, M.; Stenbauer, G. The RoboCup Logistics League from a Planning Perspective. In Proceedings of the Workshop on Planning and Robotics (PlanRob) at International Conference on Automated Planning and Scheduling (ICAPS), Nancy, France, 26–20 October 2020. [Google Scholar]
- Niemueller, T.; Karpas, E.; Vaquero, T.; Timmons, E. Planning and Execution Competition for Logistics Robots in Simulation. Available online: http://www.robocup-logistics.org/sim-comp/logrobcomp-rules2017-v2.pdf?attredirects=0 (accessed on 1 February 2022).
- RoboCup Logistics League. Planning and Execution Competition for Logistics Robots in Simulation. Available online: http://www.robocup-logistics.org/sim-comp (accessed on 1 February 2022).
- Schäpers, B.; Niemueller, T.; Lakemeyer, G. ASP-based Time-Bounded Planning for Logistics Robots. In Proceedings of the Twenty-Eighth International Conference on Automated Planning and Scheduling, Delft, The Netherlands, 24–29 June 2018; de Weerdt, M., Koenig, S., Röger, G., Spaan, M., Eds.; AAAI Press: Palo Alto, CA, USA, 2018. [Google Scholar]
- Coles, A.; Coles, A.; Fox, M.; Long, D. Forward-Chaining Partial-Order Planning. In Proceedings of the 20th International Conference on Automated Planning and Scheduling; Brafman, R., Ed.; AAAI Press: Palo Alto, CA, USA, 2010; pp. 42–49. [Google Scholar]
- Cashmore, M.; Fox, M.; Long, D.; Magazzeni, D.; Ridder, B.; Carrera, A.; Palomeras, N.; Hurtos, N.; Carreras, M. ROSPlan: Planning in the Robot Operating System. In Proceedings of the Twenty-Fifth International Conference on Automated Planning and Scheduling, Jerusalem, Israel, 7–11 June 2015; Brafman, R., Ed.; AAAI Press: Palo Alto, CA, USA, 2015; pp. 333–341. [Google Scholar]
- Crosby, M.; Petrick, R.P.A.; Rovida, F.; Krueger, V. Integrating Mission and Task Planning in an Industrial Robotics Framework. In Proceedings of the Twenty-Seventh International Conference on Automated Planning and Scheduling, Pittsburgh, PA, USA, 18–23 June 2017; Barbulescu, L., Ed.; AAAI Press: Palo Alto, CA, USA, 2017; pp. 471–479. [Google Scholar]
- Cacace, J.; Caccavale, R.; Finzi, A.; Lippiello, V. Interactive Plan Execution during Human-Robot Cooperative Manipulation. In Proceedings of the Workshop on Planning and Robotics (PlanRob) at International Conference on Automated Planning and Scheduling (ICAPS), Delft, The Netherlands, 26 June 2018; pp. 82–88. [Google Scholar]
- Johannsmeier, L.; Haddadin, S. A Hierarchical Human-Robot Interaction-Planning Framework for Task Allocation in Collaborative Industrial Assembly Processes. IEEE Robot. Autom. Lett. 2017, 2, 41–48. [Google Scholar] [CrossRef] [Green Version]
- Ghallab, M.; Knoblock, C.; Wilkins, D.; Barrett, A.; Christianson, D.; Friedman, M.; Kwok, C.; Golden, K.; Penberthy, S.; Smith, D.; et al. PDDL—The Planning Domain Definition Language. 1998. Available online: https://www.researchgate.net/publication/2278933_PDDL_-_The_Planning_Domain_Definition_Language (accessed on 1 February 2022).
- Ghallab, M.; Nau, D.; Traverso, P. Automated Planning; Elsevier: Amsterdam, The Netherlands, 2004. [Google Scholar]
- Mayer, M.C.; Orlandini, A.; Umbrico, A. A Formal Account of Planning with Flexible Timelines. In Proceedings of the 21st International Symposium on Temporal Representation and Reasoning, Verona, Italy, 8–10 September 2014; pp. 37–46. [Google Scholar] [CrossRef]
- Cushing, W.; Subbarao Kambhampati, M.; Weld, D.S. When is temporal planning really temporal? In Proceedings of the Twentieth International Joint Conference on Artificial Intelligence, Hyderabad, India, 6–12 January 2007; Sangal, R., Mehta, H., Bagga, R.K., Eds.; AAAI Press: Palo Alto, CA, USA, 2007; pp. 1852–1859. [Google Scholar]
- Fox, M.; Long, D. PDDL2.1: An Extension to PDDL for Expressing Temporal Planning Domains. J. Artif. Intell. Res. 2003, 20, 61–124. [Google Scholar] [CrossRef]
- Epple, U. Grundlagen der Modellierung, Vorlesung: Modelle der Leittechnik, SS2012; RWTH Aachen: Aachen, Germany, 2013. [Google Scholar]
- Lima, O.; Ventura, R.; Awaad, I. Integrating Classical Planning and Real Robots in Industrial and Service Robotics Domains. In Proceedings of the Workshop on Planning and Robotics (PlanRob) at International Conference on Automated Planning and Scheduling (ICAPS), Delft, The Netherlands, 26 June 2018; pp. 75–81. [Google Scholar]
- Coles, A.; Coles, A.; Clark, A.; Gilmore, S. Cost-Sensitive Concurrent Planning Under Duration Uncertainty for Service-Level Agreements. In Proceedings of the Twenty-First International Conference on Automated Planning and Scheduling, Freiburg, Germany, 11–16 June 2011; Bacchus, F., Ed.; AAAI Press: Palo Alto, CA, USA, 2011; pp. 34–41. [Google Scholar]
- Benton, J.; Coles, A.; Coles, A. Temporal Planning with Preferences and Time-Dependent Continuous Costs. In Proceedings of the Twenty-Second International Conference on International Conference on Automated Planning and Scheduling, ICAPS’12, Sao Paulo, Brazil, 25–29 June 2012; AAAI Press: Palo Alto, CA, USA, 2012; pp. 2–10. [Google Scholar]
- Sapena, O.; Marzal, E.; Onaindia, E. TFLAP: A Temporal Forward Partial-Order Planner. 2018. Available online: https://ipc2018-temporal.bitbucket.io/planner-abstracts/team2.pdf (accessed on 1 February 2022).
- Eyerich, P.; Mattmüller, R.; Röger, G. Using the Context-enhanced Additive Heuristic for Temporal and Numeric Planning. In Proceedings of the Nineteenth International Conference on Automated Planning and Scheduling, Thessaloniki, Greece, 19–23 September 2009; Gerevini, A., Howe, H., Cesta, A., Refanidis, R., Eds.; ICAPS and International Conference on Automated Planning and Scheduling. AAAI Press: Palo Alto, CA, USA, 2009; pp. 114–121. [Google Scholar]
- Orlandini, A.; Cialdea Mayer, M.; Umbrico, A.; Cesta, A. Design of Timeline-Based Planning Systems for Safe Human-Robot Collaboration. In Knowledge Engineering Tools and Techniques for AI Planning; Vallati, M., Kitchin, D., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2020; pp. 231–248. [Google Scholar] [CrossRef]
- Bezrucav, S.O.; Kaiser, M.; Corves, B. Case Study: AI Task Planning Setup for an Industrial Scenario with Mobile Manipulators. In Proceedings of the Scheduling and Planning Applications Workshop of The Thirty-First International Conference on Automated Planning and Scheduling, Guangzhou, China, 2–13 August 2021. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| planner| | 4 | 6 | 8 | 10 | 12 |
|---|---|---|---|---|---|
| popf | |||||
| optic | |||||
| tflap | |||||
| tfd |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bezrucav, S.-O.; Corves, B. Modelling Automated Planning Problems for Teams of Mobile Manipulators in a Generic Industrial Scenario. Appl. Sci. 2022, 12, 2319. https://doi.org/10.3390/app12052319
Bezrucav S-O, Corves B. Modelling Automated Planning Problems for Teams of Mobile Manipulators in a Generic Industrial Scenario. Applied Sciences. 2022; 12(5):2319. https://doi.org/10.3390/app12052319
Chicago/Turabian StyleBezrucav, Stefan-Octavian, and Burkhard Corves. 2022. "Modelling Automated Planning Problems for Teams of Mobile Manipulators in a Generic Industrial Scenario" Applied Sciences 12, no. 5: 2319. https://doi.org/10.3390/app12052319
APA StyleBezrucav, S.-O., & Corves, B. (2022). Modelling Automated Planning Problems for Teams of Mobile Manipulators in a Generic Industrial Scenario. Applied Sciences, 12(5), 2319. https://doi.org/10.3390/app12052319