
Bridge Modal Parameter Identification from UAV Measurement Based on Empirical Mode Decomposition and Fourier Transform




Abstract
:1. Introduction
2. Methods
2.1. KLT Optical-Flow Method
2.2. Correction Technique of Displacement Signal Measured by UAV
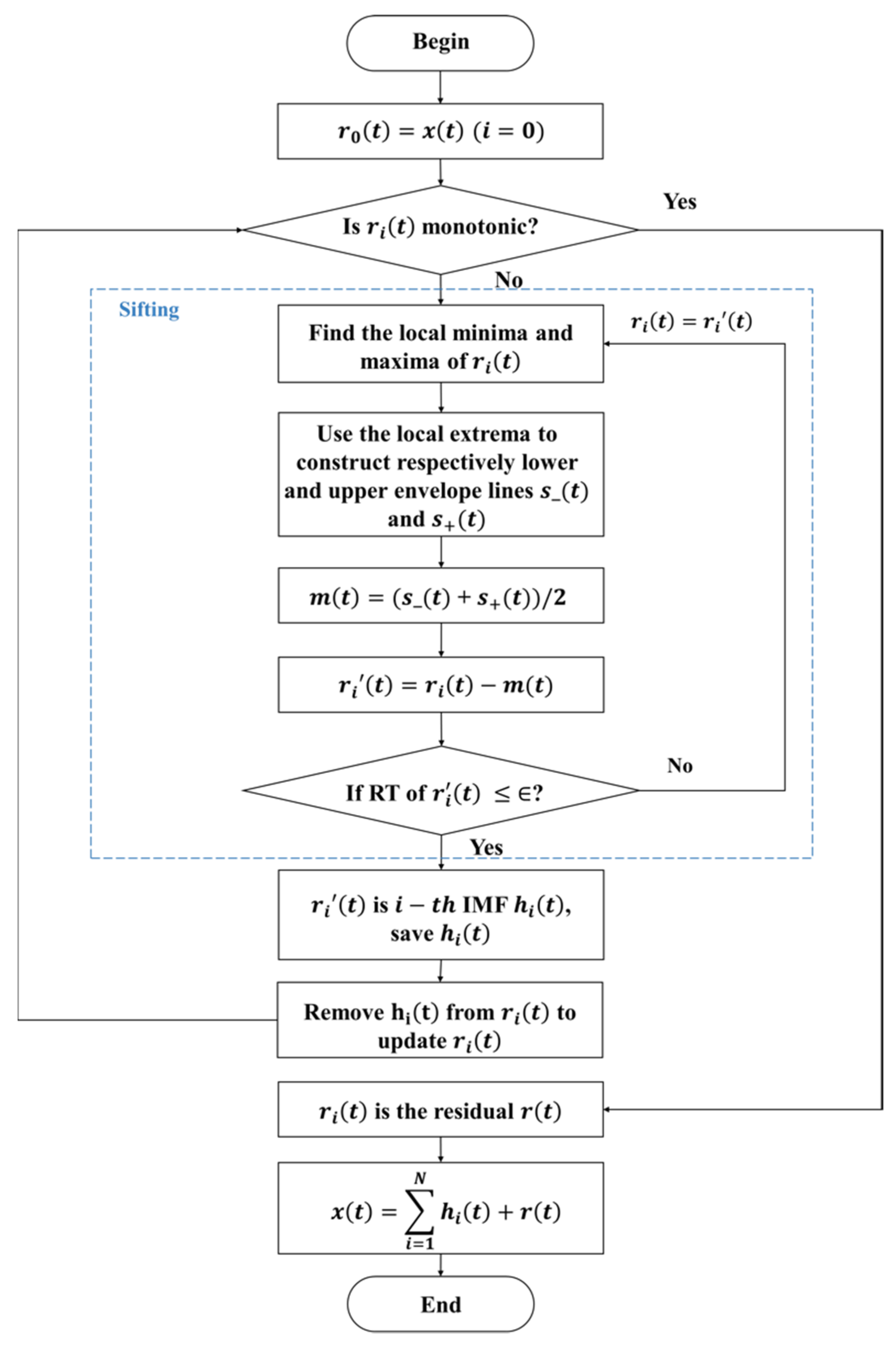
2.2.1. Empirical Mode Decomposition
2.2.2. Fourier Transform and Inverse Fourier Transform
2.2.3. Differential Filtering
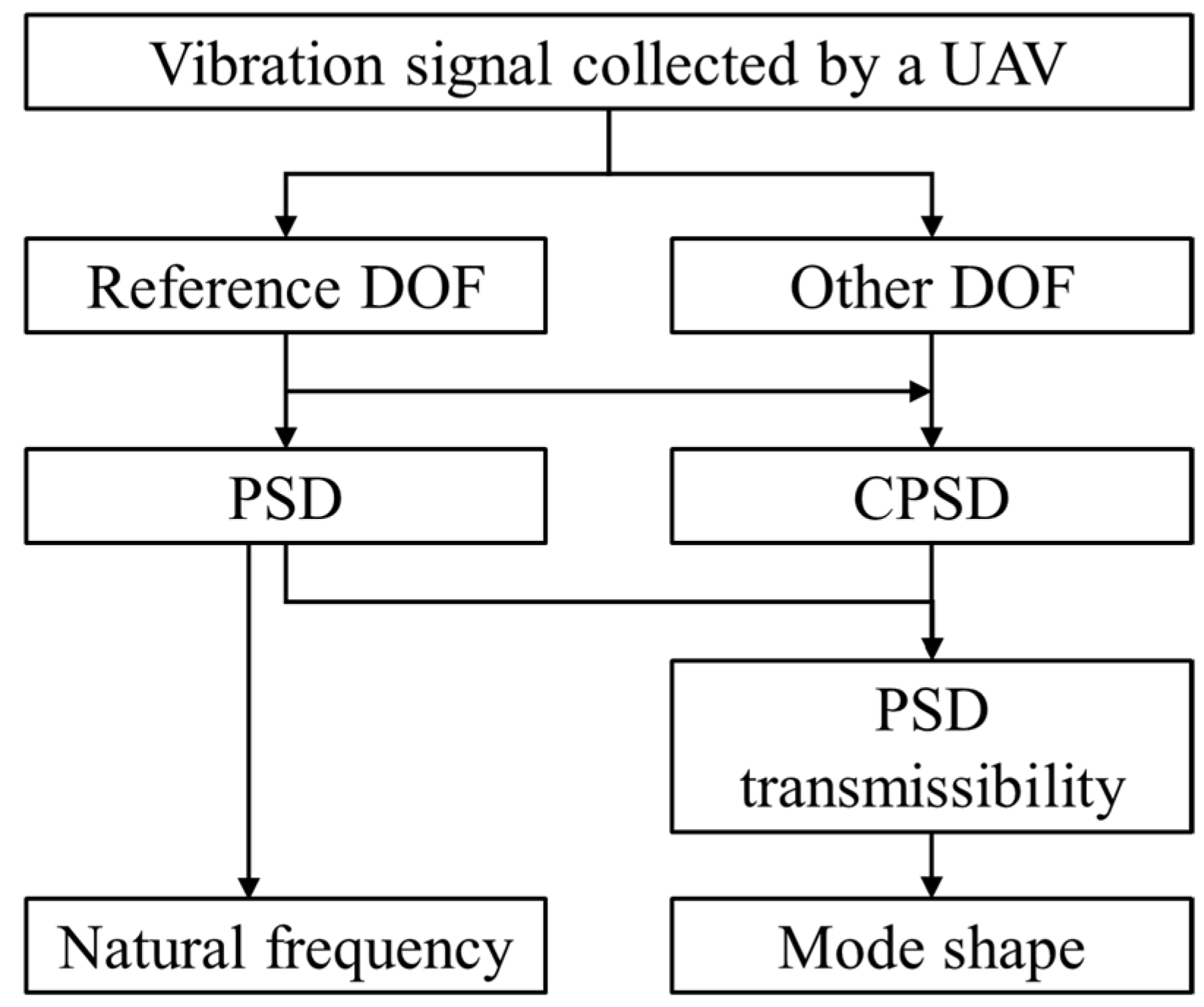
2.3. Operational Modal Analysis
3. Experiment
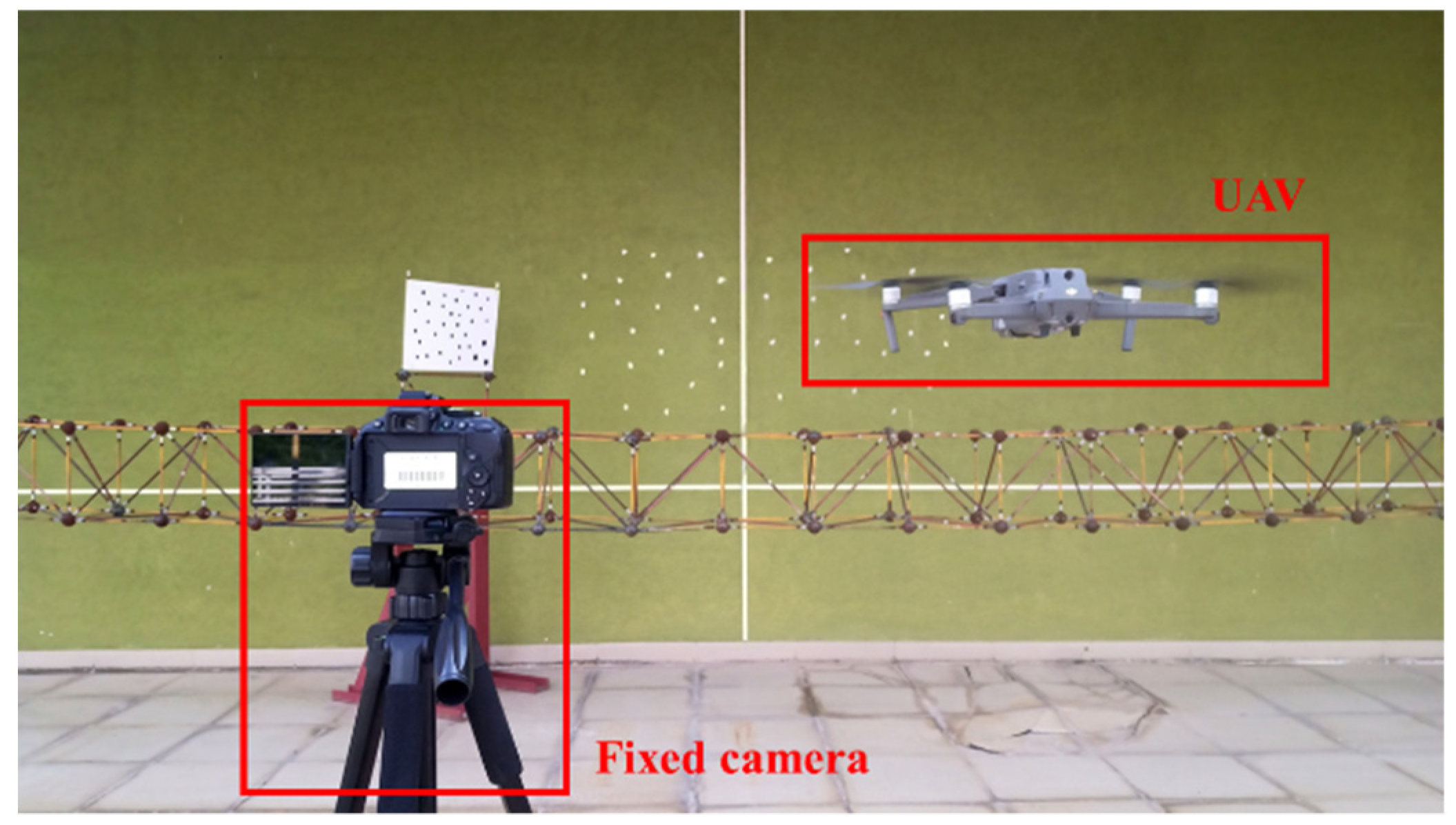
3.1. Equipment of Experiment
3.2. Experimental Scheme
- (1)
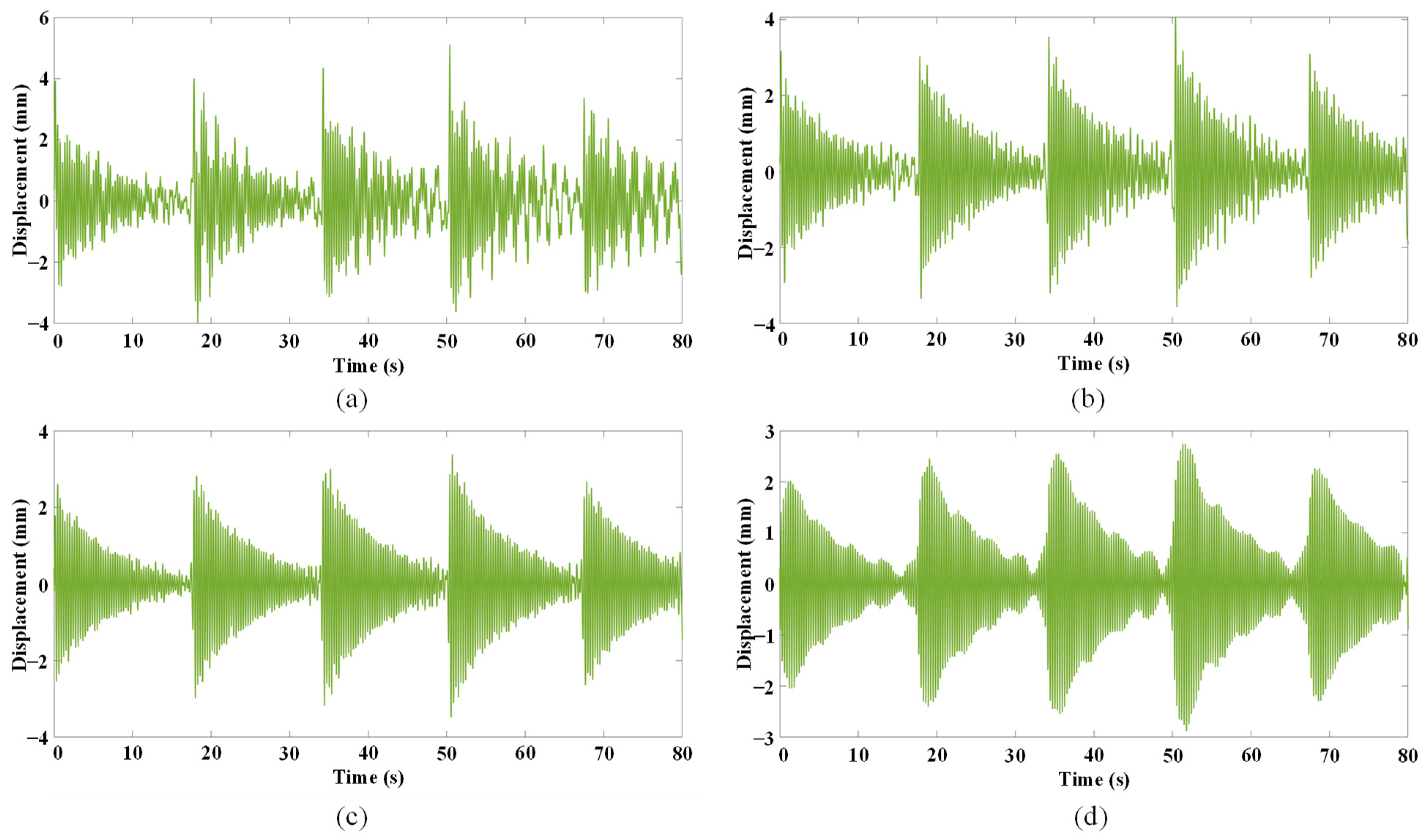
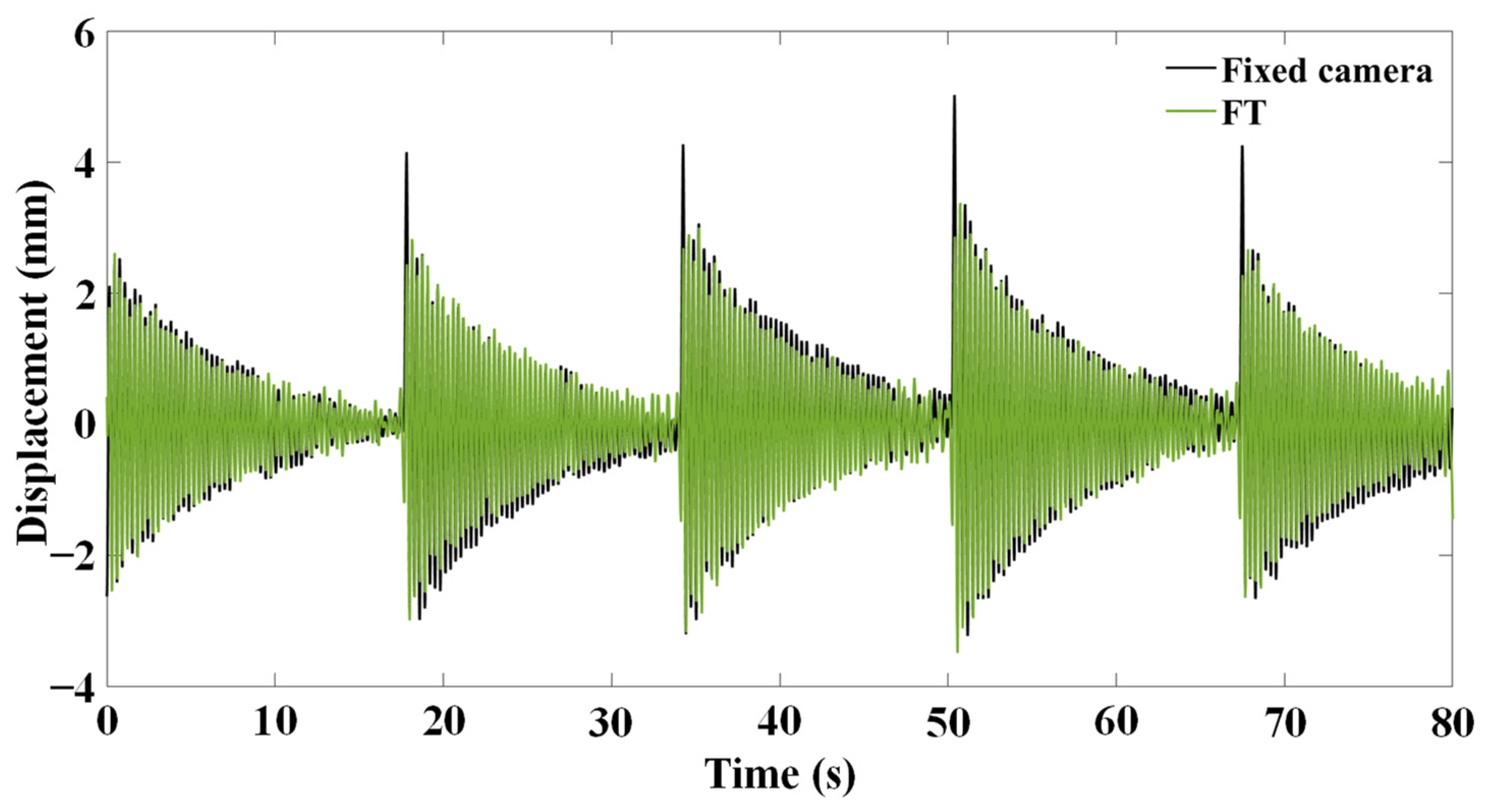
- The displacement signal measured by the UAV is corrected by a filter combined FT with IFT in the first part. By comparing the correction results obtained by filtering different low-frequency signals and taking the degree of consistency with the displacement signal measured by the fixed camera as the index, the with best correction effect on the displacement signal measured by a UAV can be determined.
- (2)
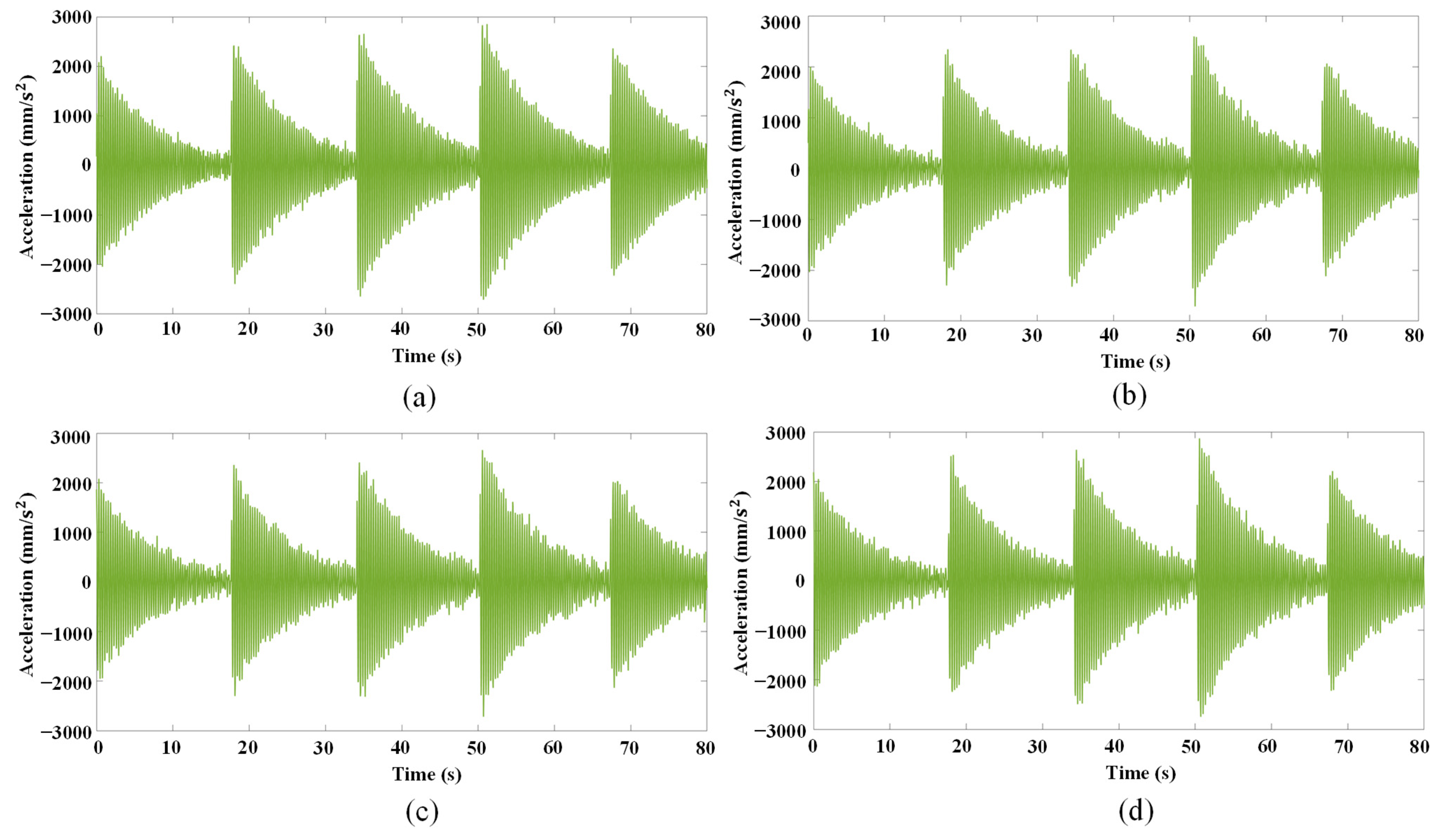
- The processing effects of EMD, FT, and DF techniques on the displacement signal measured by the UAV and the extraction accuracy of modal parameters based on vibration signal are compared. The processing effects of three techniques are compared from three indexes: burr degree, correction accuracy, and consistency with the displacement signal measured by the fixed camera. Finally, the effect of three methods on identification of the modal parameters based on vibration signals are compared from the extracted natural frequency and mode shape of the model.
4. Experimental Results and Analysis
4.1. Influence of F on the Correction Effect of FT
4.2. Comparison of EMD, FT, and DF
5. Discussion
- (1)
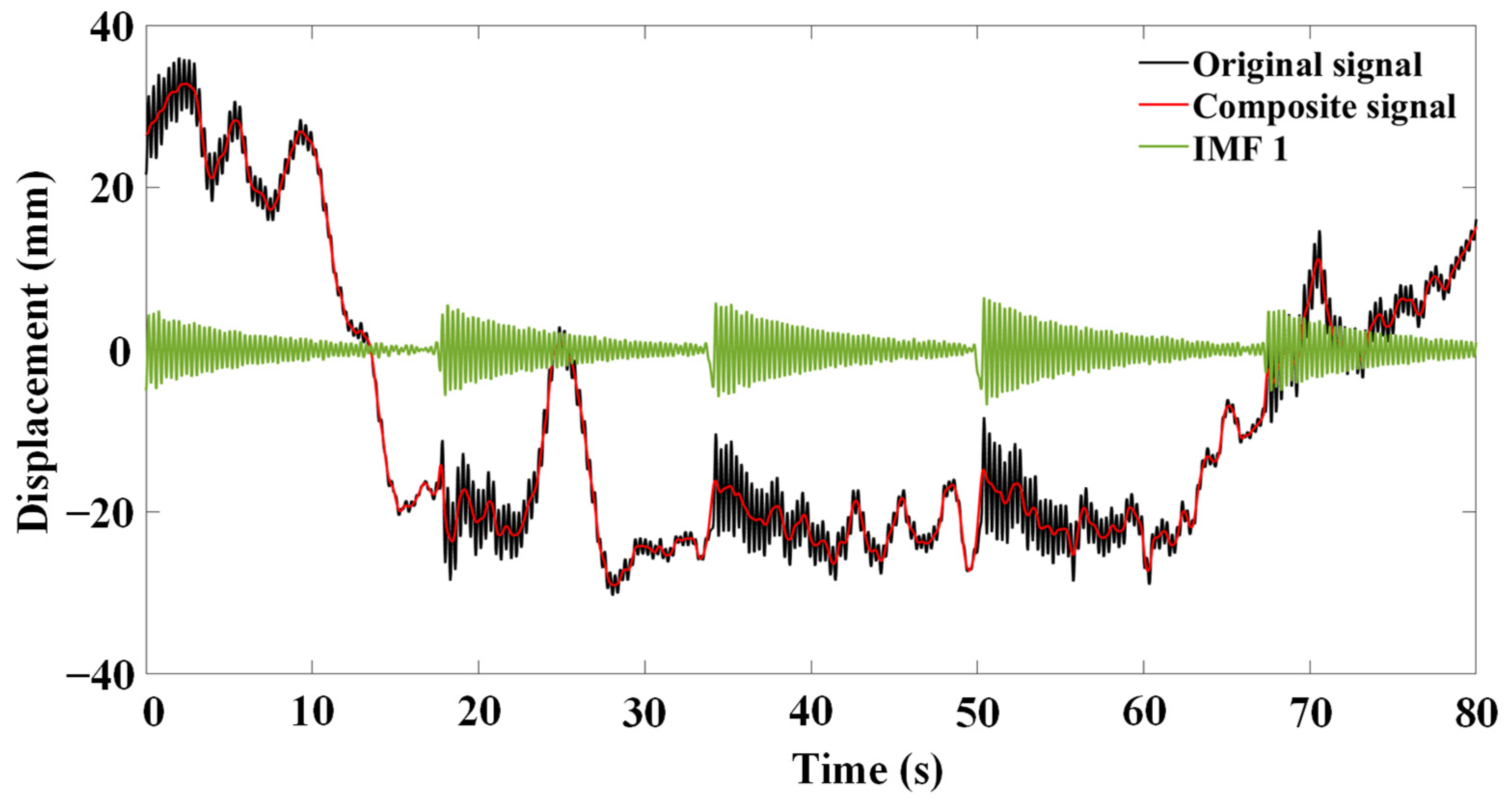
- From the above experimental results, it can be known EMD has the best effect on the correction of displacement signal measured by the UAV. With respect of the acceleration signals, the effect of EMD and FT is better than DF, and the reason is as follows: the signals of EMD and FT are processed by second-order differential filtering on the basis of the corrected signals, while DF directly applies a differential filter to the original signal, which contains random signal caused by UAV measurement, so the signal after DF is poor. Figure 18 shows the EMD corrected displacement signal and its second-order differential. The figure shows that the burr of the signal increases significantly after DF, which shows the noise can be introduced by DF. Moreover, the true displacement signal of the bridge model cannot be obtained through DF, and therefore, EMD and FT are obviously more reliable for the processing of displacement signal measured by the UAV.
- (2)
- In addition to the above three techniques for signal measured by the UAV, Average Filtering (AF) [43] technique can also be used to correct the displacement signal measured by the UAV (see the Appendix A for more details). In the first step of AF correction technique, the signal of structural vibration is filtered out from the original signal, and the obtained displacement signal is the false displacement. In the second step, the filtered structural vibration signal can be obtained by subtracting the false displacement from the original signal. The correction effect of AF depends on (see the Appendix A for more details). The optimal effect of AF technique (, it is verified by numerical experiment) and the correction effects of EMD and FT are compared in Table 2 (the results are based on the displacement signals). The table shows that the effect of AF technique is between EMD and FT. Therefore, using AF to correct the displacement measured by UAVs is also a considerable method.
- (3)
- The above conclusion is based on the bridge model. In follow-up research, the methods used in this paper will be applied to the measurement results of actual bridges.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Appendix A

References
- Doebling, S.W.; Farrar, C.R.; Prime, M.B. A Summary Review of Vibration-Based Damage Identification Methods. Shock Vib. Dig. 1998, 30, 91–105. [Google Scholar] [CrossRef]
- Kovačič, B.; Kamnik, R.; Štrukelj, A.; Vatin, N. Processing of Signals Produced by Strain Gauges in Testing Measurements of the Bridges. Procedia Eng. 2015, 117, 795–801. [Google Scholar] [CrossRef]
- Soyoz, S.; Feng, M.Q. Long-Term Monitoring and Identification of Bridge Structural Parameters. Comput. Civ. Infrastruct. Eng. 2010, 24, 82–92. [Google Scholar] [CrossRef]
- Siringoringo, D.M.; Fujino, Y. Noncontact Operational Modal Analysis of Structural Members by Laser Doppler Vibrometer. Comput. Civ. Infrastruct. Eng. 2010, 24, 249–265. [Google Scholar] [CrossRef]
- Psimoulis, P.; Pytharouli, S.; Karambalis, D.; Stiros, S. Potential of Global Positioning System (GPS) to measure frequencies of oscillations of engineering structures. J. Sound Vib. 2008, 318, 606–623. [Google Scholar] [CrossRef]
- Shi, J.; Tomasi, C. Good Features to Track. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 21–23 June 1994; Volume 600, pp. 593–600. [Google Scholar]
- Lucas, B.D. An Iterative Image Registration Technique with an Application to Stereo Vision (DARPA). In Proceedings of the 7th International Joint Conference on Artificial Intelligence, Vancouver, BC, Canada, 24–28 August 1981; Volume 81, pp. 674–679. [Google Scholar]
- Liu, F.; Yundong, W.U.; Cai, G.; Chen, S.; Science, S.O.; University, J. Research of Feature Point Tracking Algorithm for UAV Video Image Based on KLT. J. Jimei Univ. 2017, 22, 73–80. [Google Scholar]
- Zhu, J.; Lu, Z.; Zhang, C. A marker-free method for structural dynamic displacement measurement based on optical flow. Struct. Infrastruct. Eng. 2020, 18, 84–96. [Google Scholar] [CrossRef]
- Han, S.H.; Rahim, T.; Shin, S.Y. Detection of Faults in Solar Panels Using Deep Learning. In Proceedings of the 2021 International Conference on Electronics, Information, and Communication (ICEIC) 2021, Jeju, Korea, 31 January–3 February 2021; pp. 1–4. [Google Scholar]
- Choi, Y.J.; Rahim, T.; Ramatryana, I.N.A.; Shin, S.Y. Improved CNN-Based Path Planning for Stairs Climbing in Autonomous UAV with LiDAR Sensor. In Proceedings of the 2021 International Conference on Electronics, Information, and Communication (ICEIC), Jeju, Korea, 31 January–3 February 2021; pp. 1–7. [Google Scholar] [CrossRef]
- Hassan, S.-A.; Rahim, T.; Shin, S.-Y. An Improved Deep Convolutional Neural Network-Based Autonomous Road Inspection Scheme Using Unmanned Aerial Vehicles. Electronics 2021, 10, 2764. [Google Scholar] [CrossRef]
- Ellenberg, A.; Kontsos, A.; Moon, F.; Bartoli, I. Bridge related damage quantification using unmanned aerial vehicle imagery. Struct. Control. Health Monit. 2016, 23, 1168–1179. [Google Scholar] [CrossRef]
- Hoskere, V.; Park, J.-W.; Yoon, H.; Spencer, B.F., Jr. Vision-Based Modal Survey of Civil Infrastructure Using Unmanned Aerial Vehicles. J. Struct. Eng. 2019, 145, 04019062. [Google Scholar] [CrossRef]
- Rodríguez-Canosa, G.; Stephen, T.; Jaime, D.C.; Antonio, B.; Bruce, M. A Real-Time Method to Detect and Track Moving Objects (DATMO) from Unmanned Aerial Vehicles (UAVs) Using a Single Camera. Remote Sens. 2012, 4, 1090–1111. [Google Scholar] [CrossRef]
- Soycan, A.; Soycan, M. Perspective correction of building facade images for architectural applications. Eng. Sci. Technol. Int. J. 2018, 22, 697–705. [Google Scholar] [CrossRef]
- Wu, Z.; Chen, G.; Ding, Q.; Yuan, B.; Yang, X. Three-Dimensional Reconstruction-Based Vibration Measurement of Bridge Model Using UAVs. Appl. Sci. 2021, 11, 5111. [Google Scholar] [CrossRef]
- Weng, Y.; Shan, J.; Lu, Z.; Lu, X.; Spencer, B.F. Homography-based structural displacement measurement for large structures using unmanned aerial vehicles. Comput. Civ. Infrastruct. Eng. 2021, 36, 1114–1128. [Google Scholar] [CrossRef]
- Zhu, X.; Chen, Z.; Tang, C.; Mi, Q.; Yan, X. Application of two oriented partial differential equation filtering models on speckle fringes with poor quality and their numerically fast algorithms. Appl. Opt. 2013, 52, 1814–1823. [Google Scholar] [CrossRef] [PubMed]
- Zhang, J.; Wu, Z.; Chen, G.; Liang, Q. Comparisons of Differential Filtering and Homography Transformation in Modal Parameter Identification from UAV Measurement. Sensors 2021, 21, 5664. [Google Scholar] [CrossRef] [PubMed]
- Huang, N.E.; Shen, Z.; Long, S.R.; Wu, M.C.; Shih, H.H.; Zheng, Q.; Yen, N.-C.; Tung, C.C.; Liu, H.H. The empirical mode decomposition and the Hilbert spectrum for nonlinear and non-stationary time series analysis. Proc. R. Soc. Lond. Ser. A Math. Phys. Eng. Sci. 1998, 454, 903–995. [Google Scholar] [CrossRef]
- Wang, G.; Chen, X.Y.; Qiao, F.L.; Wu, Z.; Huang, N.E. On Intrinsic Mode Function. Advances in Adaptive Data Analysis 2010, 2, 277–293. [Google Scholar] [CrossRef]
- Rao, R.; Li, C.; Huang, Y.; Zhen, X.; Wu, L. Method for Structural Frequency Extraction from GNSS Displacement Monitoring Signals. J. Test. Eval. 2019, 47, 2026–2043. [Google Scholar] [CrossRef]
- Bochner, S. Fourier transforms. In Annals of Mathematics Studies; Princeton University Press: Princeton, NJ, USA, 1949; Volume 7, pp. 145–151. [Google Scholar]
- Lin, H.-C.; Ye, Y.-C. Reviews of bearing vibration measurement using fast Fourier transform and enhanced fast Fourier transform algorithms. Adv. Mech. Eng. 2019, 11, 1687814018816751. [Google Scholar] [CrossRef]
- Lazaro, J.; Wessel, R.; Koppenborg, J.; Dudziak, G.; Blewett, I. Inverse Fourier transform method for characterizing arrayed-waveguide gratings. IEEE Photon Technol. Lett. 2003, 15, 93–95. [Google Scholar] [CrossRef]
- Brownjohn, J.; Magalhaes, F.; Caetano, E.; Cunha, A. Ambient vibration re-testing and operational modal analysis of the Humber Bridge. Eng. Struct. 2010, 32, 2003–2018. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, S.; Li, H.; Wen, B. Harmonic mode identification in the operational modal analysis and its application. Zhendong Ceshi Yu Zhenduan/J. Vib. Meas. Diagn. 2008, 28, 197–200. [Google Scholar]
- Yan, W.-J.; Ren, W.-X. An Enhanced Power Spectral Density Transmissibility (EPSDT) approach for operational modal analysis: Theoretical and experimental investigation. Eng. Struct. 2015, 102, 108–119. [Google Scholar] [CrossRef]
- Yan, W.-J.; Ren, W.-X. Operational Modal Parameter Identification from Power Spectrum Density Transmissibility. Comput. Civ. Infrastruct. Eng. 2012, 27, 202–217. [Google Scholar] [CrossRef]
- Mohanty, P.; Rixen, D.J. Identifying mode shapes and modal frequencies by operational modal analysis in the presence of harmonic excitation. Exp. Mech. 2005, 45, 213–220. [Google Scholar] [CrossRef]
- Jiang, Z.; Yi, H. An Image Pyramid-Based Feature Detection and Tracking Algorithm. Geomat. Inf. Ence Wuhan Univ. 2007, 32, 680–683. [Google Scholar]
- Harris, F.J. On the use of windows for harmonic analysis with the discrete Fourier transform. Proc. IEEE 1978, 66, 51–83. [Google Scholar] [CrossRef]
- Wang, J.; Ye, Y.; Pan, X.; Gao, X. Parallel-type fractional zero-phase filtering for ECG signal denoising. Biomed. Signal Process. Control 2015, 18, 36–41. [Google Scholar] [CrossRef]
- Devriendt, C.; Guillaume, P. The use of transmissibility measurements in output-only modal analysis. Mech. Syst. Signal Process. 2007, 21, 2689–2696. [Google Scholar] [CrossRef]
- Devriendt, C.; Guillaume, P. Identification of modal parameters from transmissibility measurements. J. Sound Vib. 2008, 314, 343–356. [Google Scholar] [CrossRef]
- Sutton, M.; Mingqi, C.; Peters, W.; Chao, Y.; McNeill, S. Application of an optimized digital correlation method to planar deformation analysis. Image Vis. Comput. 1986, 4, 143–150. [Google Scholar] [CrossRef]
- Brincker, R.; Zhang, L.; Andersen, P. Modal identification of output-only systems using frequency domain decomposition. Smart Mater. Struct. 2001, 10, 441–445. [Google Scholar] [CrossRef]
- Chen, G.; Wu, Z.; Gong, C.; Zhang, J.; Sun, X. DIC-Based Operational Modal Analysis of Bridges. Adv. Civ. Eng. 2021, 2021, 6694790. [Google Scholar] [CrossRef]
- Chen, G.; Liang, Q.; Zhong, W.; Gao, X.; Cui, F. Homography-based measurement of bridge vibration using UAV and DIC method. Measurement 2020, 170, 108683. [Google Scholar] [CrossRef]
- Cleveland, W.S. LOWESS: A Program for Smoothing Scatterplots by Robust Locally Weighted Regression. Am. Stat. 1981, 35, 54. [Google Scholar] [CrossRef]
- Pastor, M.; Binda, M.; Harčarik, T. Modal Assurance Criterion. Procedia Eng. 2012, 48, 543–548. [Google Scholar] [CrossRef]
- Zhang, C.; Xu, C.Y. A De-Noising Method of Acceleration Signal for Vehicle Based on Kalman Filter and Average Filter. Adv. Mater. Res. 2011, 225, 605–608. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Method | EAC | TRAC | STD |
|---|---|---|---|
| EMD | 24.897 | 0.941 | 98.604 |
| FT | 25.310 | 0.942 | 99.914 |
| DF | 26.456 | 0.918 | 106.508 |
| Method | EAC | TRAC | STD |
|---|---|---|---|
| EMD | 0.033 | 0.950 | 0.053 |
| FT | 0.045 | 0.946 | 0.062 |
| DF | 0.036 | 0.947 | 0.060 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, Z.; Teng, S.; Luo, W.; Bassir, D.; Chen, G. Bridge Modal Parameter Identification from UAV Measurement Based on Empirical Mode Decomposition and Fourier Transform. Appl. Sci. 2022, 12, 8689. https://doi.org/10.3390/app12178689
Yan Z, Teng S, Luo W, Bassir D, Chen G. Bridge Modal Parameter Identification from UAV Measurement Based on Empirical Mode Decomposition and Fourier Transform. Applied Sciences. 2022; 12(17):8689. https://doi.org/10.3390/app12178689
Chicago/Turabian StyleYan, Zhaocheng, Shuai Teng, Wenjun Luo, David Bassir, and Gongfa Chen. 2022. "Bridge Modal Parameter Identification from UAV Measurement Based on Empirical Mode Decomposition and Fourier Transform" Applied Sciences 12, no. 17: 8689. https://doi.org/10.3390/app12178689
APA StyleYan, Z., Teng, S., Luo, W., Bassir, D., & Chen, G. (2022). Bridge Modal Parameter Identification from UAV Measurement Based on Empirical Mode Decomposition and Fourier Transform. Applied Sciences, 12(17), 8689. https://doi.org/10.3390/app12178689