
Flexible DEM Model Development and Parameter Calibration for Rape Stem


Abstract
:1. Introduction
2. Materials and Methods
2.1. Rape’s Characteristic Material Parameters
2.2. Rape Stem Contact Parameters Test
2.2.1. Coefficient of Restitution
2.2.2. Coefficient of Static Friction
2.2.3. Coefficient of Rolling Friction
2.3. Rape Stem Contact Parameter Calibration
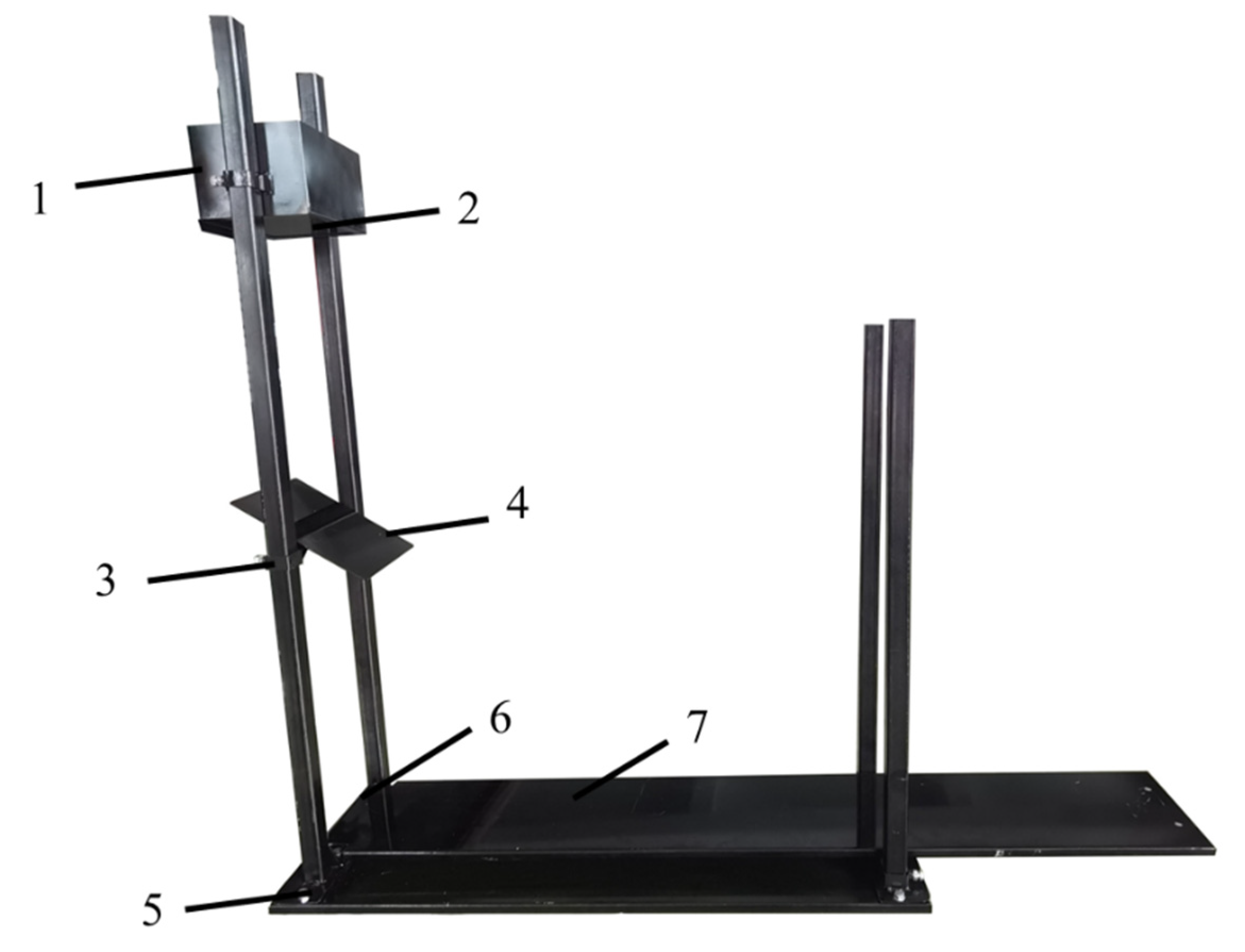
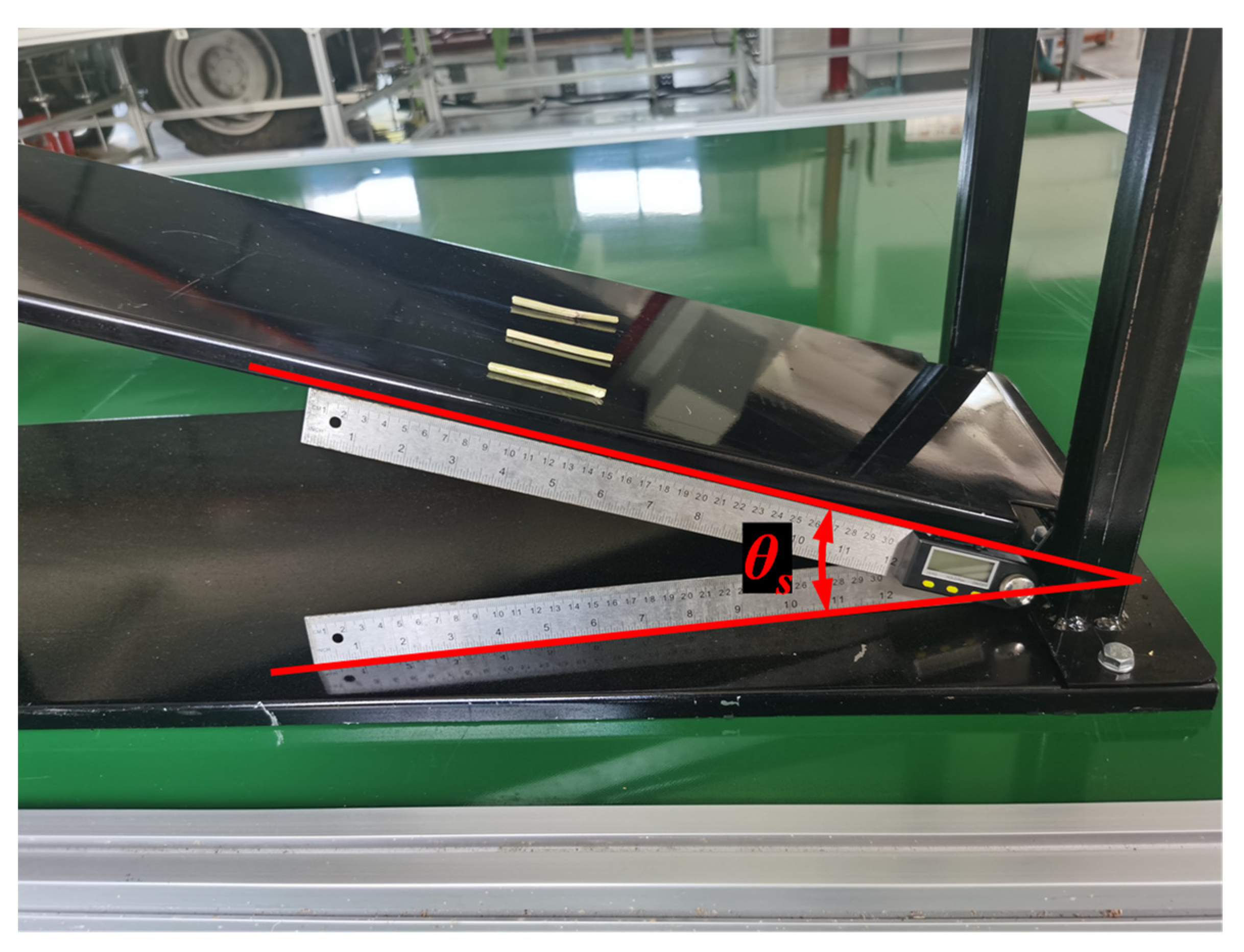
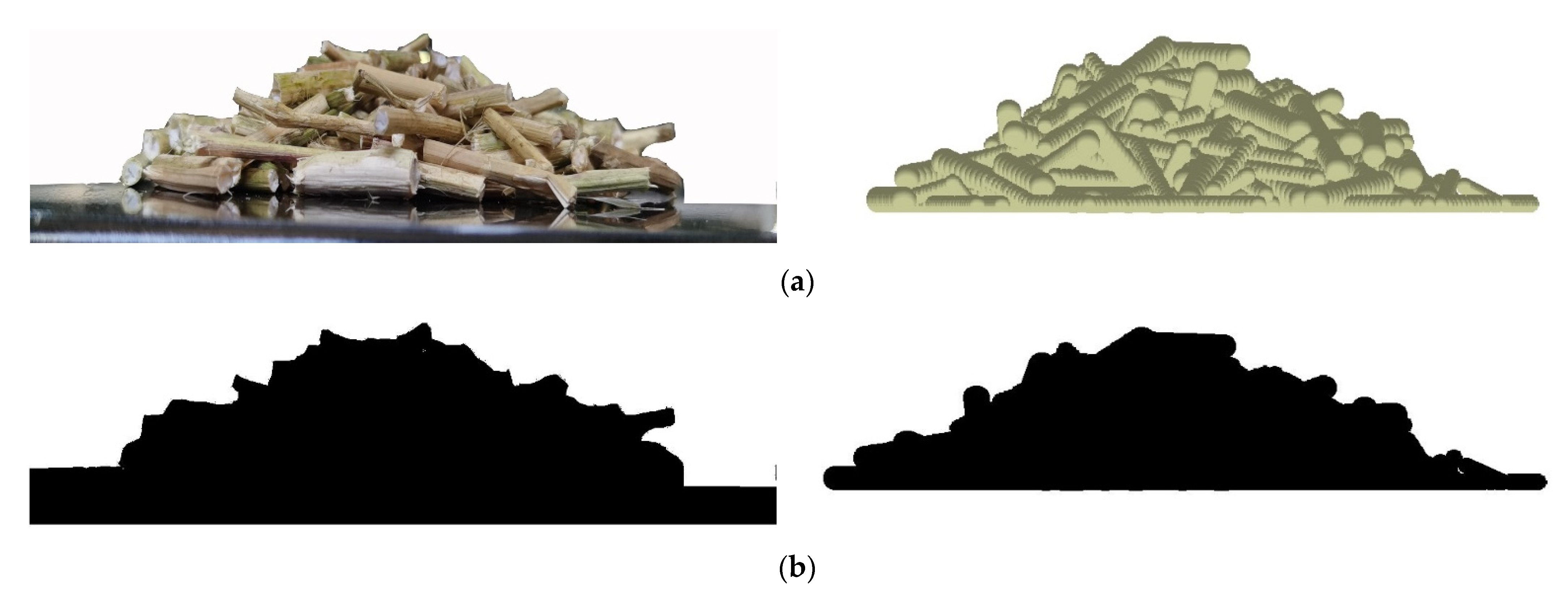
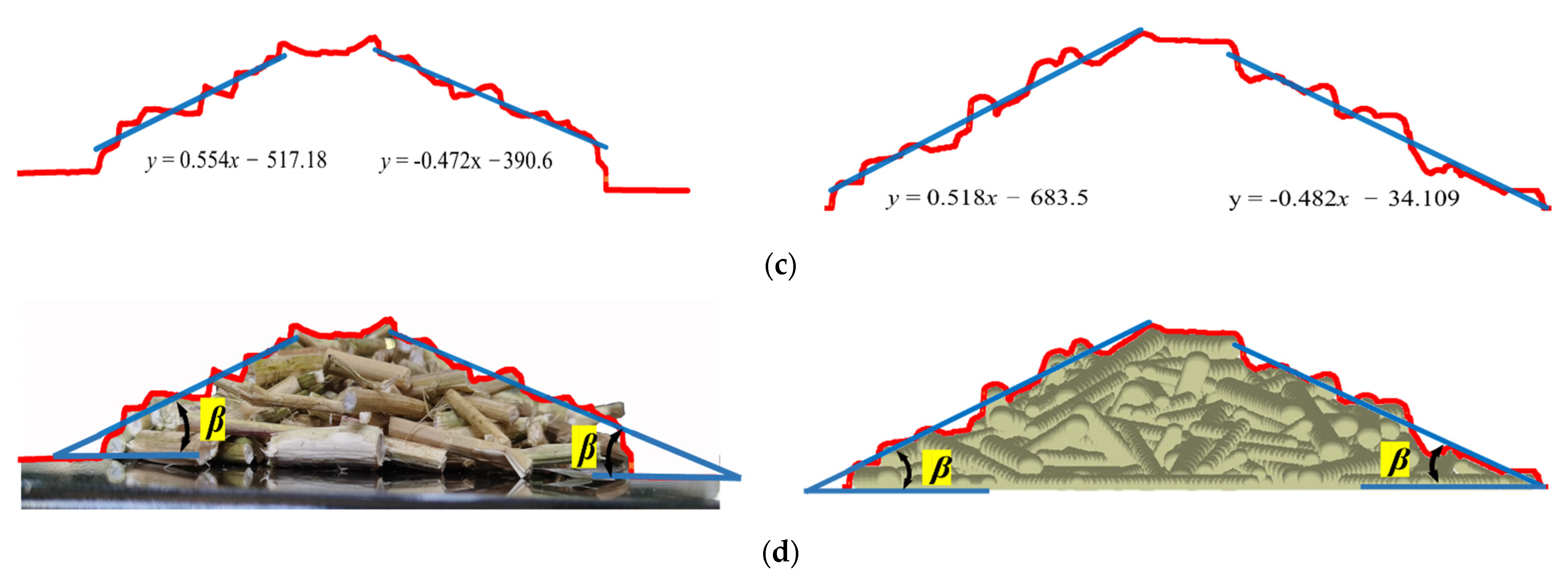
2.3.1. Rape Stem Repose Angle Test
2.3.2. Rape Stem Repose Angle Simulation Model
2.3.3. Rape Stem Contact Parameter Calibration Method
2.4. Calibration of Flexible Discrete Element Parameter for Rape Stem
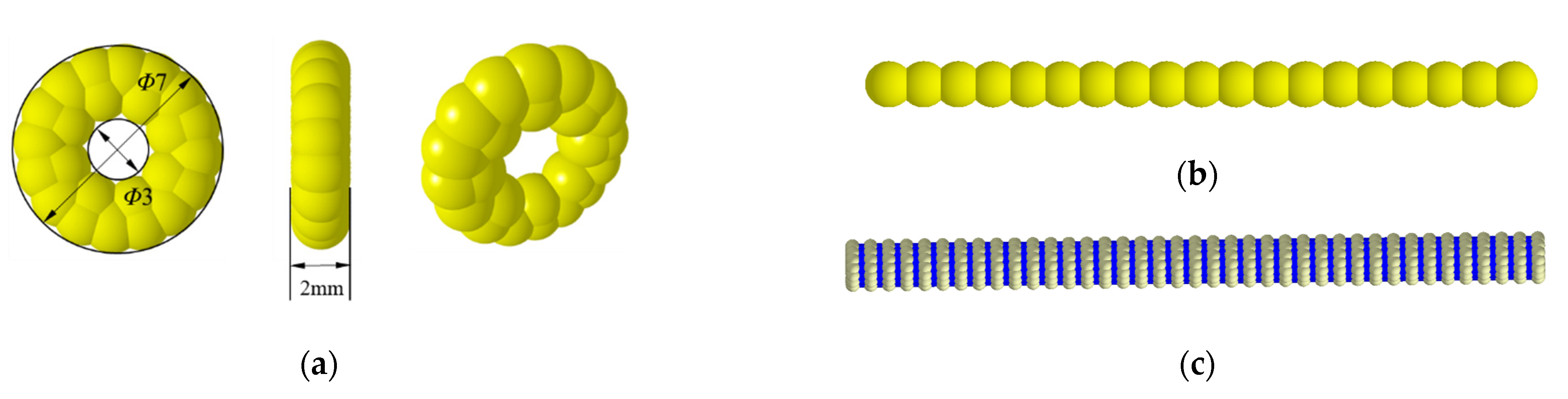
2.4.1. Flexible Discrete Element Model
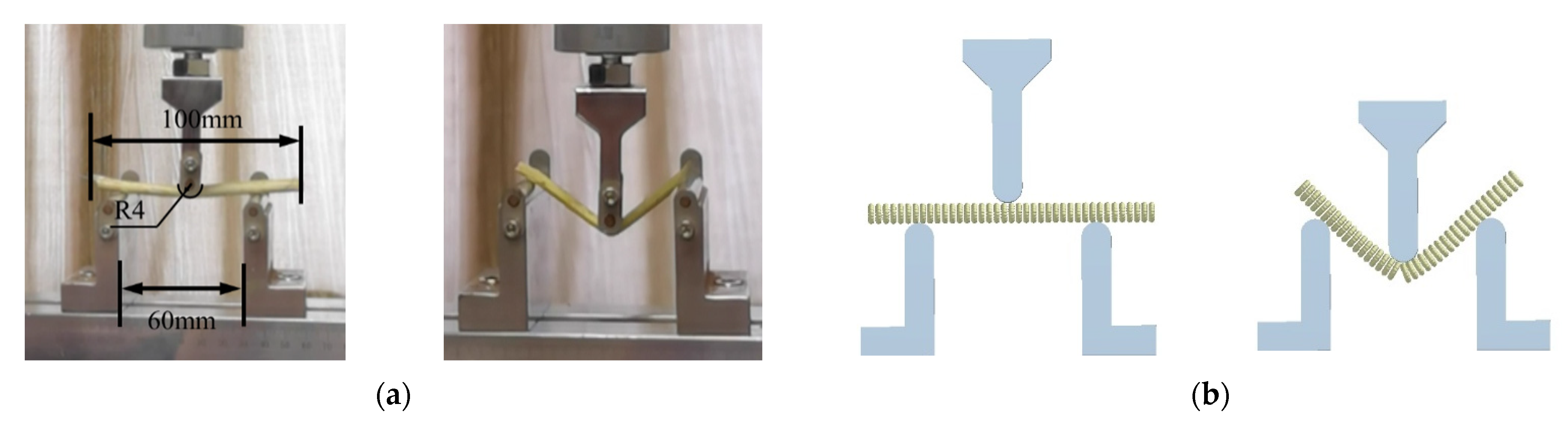
2.4.2. Three-Point Bending Test
2.4.3. Bonding Parameter Calibration
3. Results and Discussion
3.1. Contact Parameter
3.1.1. Repose Angle Test
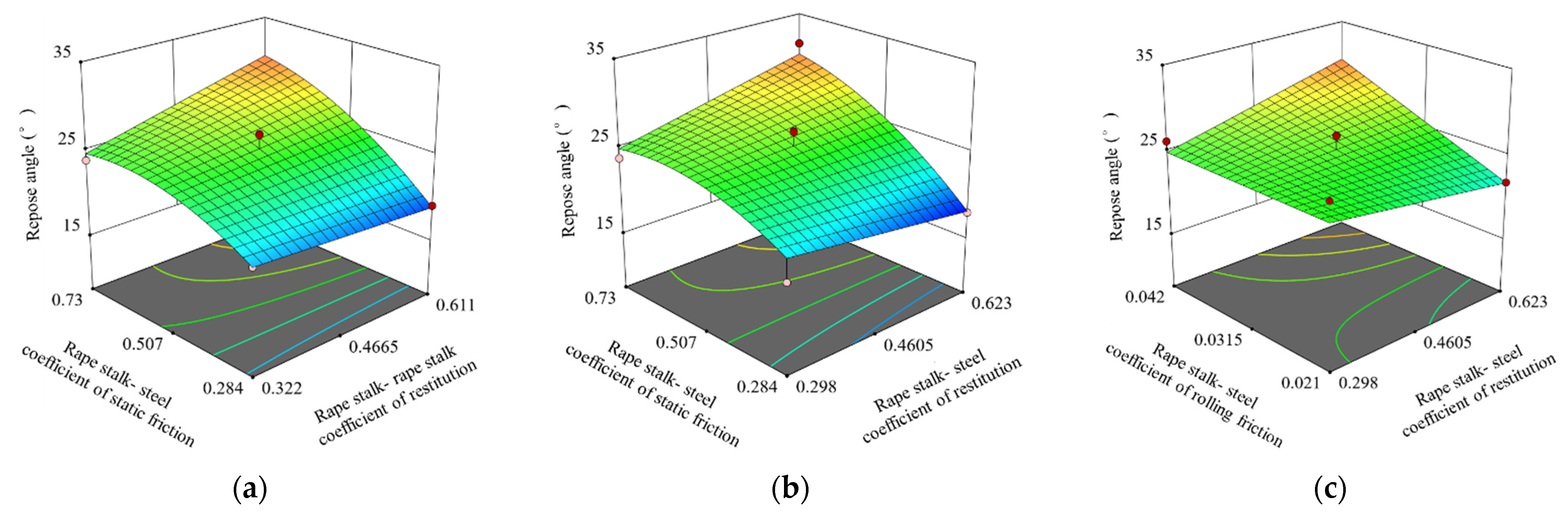
3.1.2. Significant Factor for Repose Angle
3.1.3. Contact Parameter Calibration
3.2. Flexible DEM Model
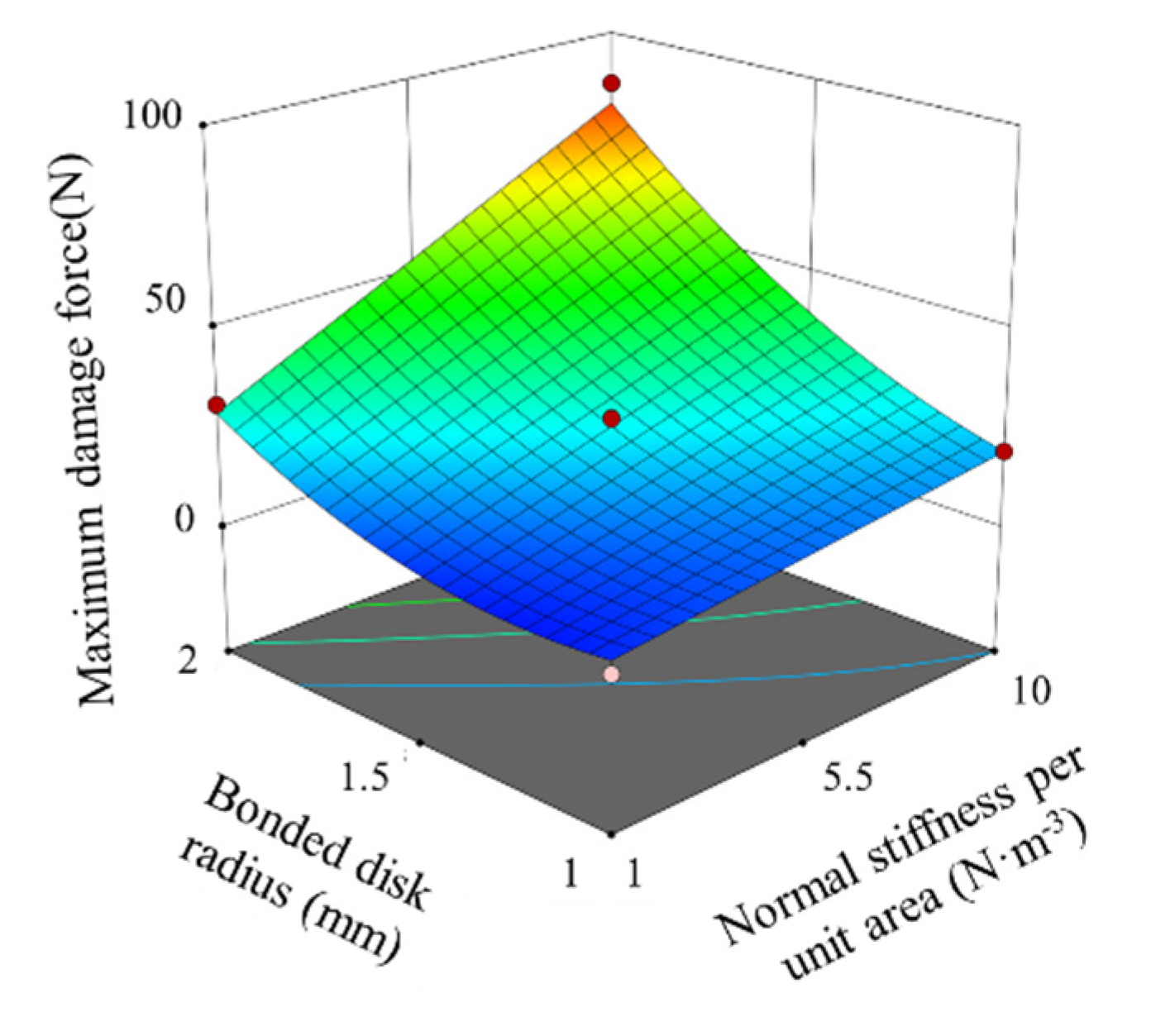
3.2.1. Bonding Parameter Box–Behnken Simulation Test
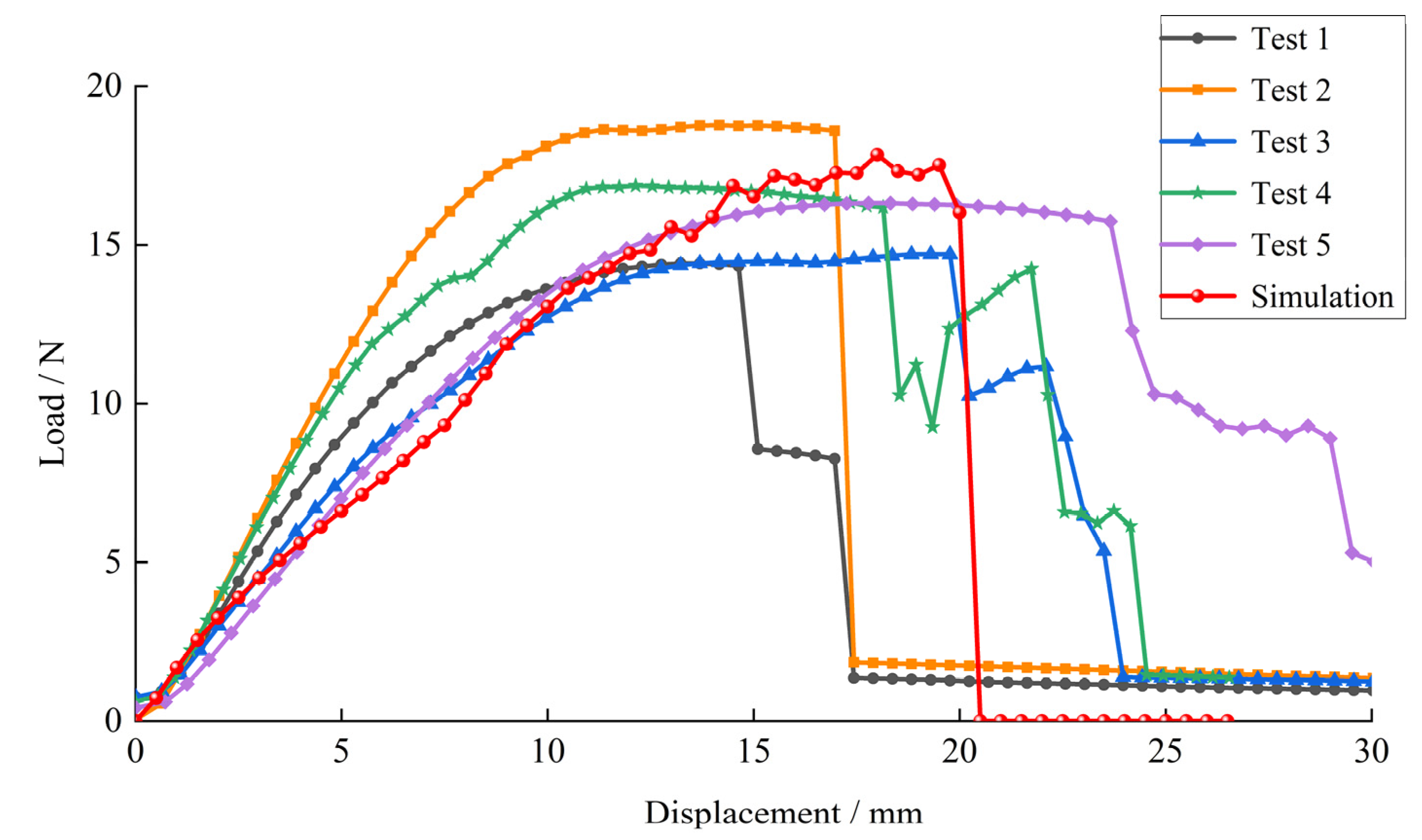
3.2.2. Test Verification
3.2.3. Process of Rape Stem Bending and Rupture
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Liu, C.; Feng, Z.C.; Xiao, T.H.; Ma, X.M.; Zhou, G.S.; Huang, F.H.; Li, J.N.; Wang, H.Z. Development, potential and adaptation of Chinese rapeseed industry. Chin. J. Oil Crop Sci. 2019, 41, 485–489. [Google Scholar]
- Guan, Z.H.; Wu, C.Y.; Li, Y.; Mu, S.L.; Jiang, L. Cutting speed follow-up adjusting system of bidirectional electric drive side cutter for rape combine harvester. Sci. Prog. 2020, 103, 0036850420935728. [Google Scholar] [CrossRef] [PubMed]
- Ma, Z.; Li, Y.M.; Xu, L.Z. Theoretical analysis of micro-vibration between a high moisture content rape stalk and a non-smooth surface of a reciprocating metal cleaning screen matrix. Biosyst. Eng. 2015, 129, 258–267. [Google Scholar] [CrossRef]
- Guan, Z.H.; Jiang, T.; Li, H.T.; Wu, C.Y.; Zhang, M.; Wang, G.; Mu, S.L. Analysis and test of the laying quality of inclined transportation rape windrower. Trans. Chin. Soc. Agric. Eng. 2021, 37, 59–68. [Google Scholar]
- Tang, Z.; Li, Y.; Li, X.Y.; Xu, T.B. Structural damage modes for rice stalks undergoing threshing. Biosyst. Eng. 2019, 186, 323–336. [Google Scholar] [CrossRef]
- Dai, F.; Song, X.; Zhao, W.; Han, Z.; Zhang, F.; Zhang, S. Motion simulation and test on threshed grains in tapered threshing and transmission device for plot wheat breeding based on CFD-DEM. Int. J. Agric. Biol. Eng. 2019, 12, 66–73. [Google Scholar] [CrossRef] [Green Version]
- Ma, Z.; Li, Y.M.; Xu, L.Z.; Chen, J.; Zhao, Z.; Tang, Z. Dispersion and migration of agricultural particles in a variable-amplitude screen box based on the discrete element method. Comput. Electron. Agric. 2017, 142, 173–180. [Google Scholar] [CrossRef]
- Yuan, J.C.; Wang, C.; He, K.; Wan, X.Y.; Liao, Q.X. Effect of components mass ratio under sieve on cleaning system performance for rape combine harvester. J. Jilin Univ. Eng. Technol. Ed. 2021, 51, 1897–1907. [Google Scholar]
- Xu, L.Z.; Wei, C.C.; Liang, Z.W.; Chai, X.Y.; Li, Y.; Liu, Q. Development of rapeseed cleaning loss monitoring system and experiments in a combine harvester. Biosyst. Eng. 2019, 178, 118–130. [Google Scholar] [CrossRef]
- Lei, X.L.; Liao, Y.T.; Liao, Q.X. Simulation of seed motion in seed feeding device with DEM-CFD coupling approach for rapeseed and wheat. Comput. Electron. Agric. 2016, 131, 29–39. [Google Scholar] [CrossRef]
- Wan, X.Y.; Liao, Q.X.; Xu, Y.; Yuan, J.C.; Li, H.T. Design and evaluation of cyclone separation cleaning devices using a conical sieve for rape combine harvesters. Appl. Eng. Agric. 2018, 34, 677–686. [Google Scholar] [CrossRef]
- Schramm, M.; Tekeste, M.Z. Wheat straw direct shear simulation using discrete element method of fibrous bonded model. Biosyst. Eng. 2022, 213, 1–12. [Google Scholar] [CrossRef]
- Liu, F.Y.; Zhang, J.; Chen, J. Modeling of flexible wheat straw by discrete element method and its parameter calibration. Int. J. Agric. Biol. Eng. 2018, 11, 42–46. [Google Scholar] [CrossRef] [Green Version]
- Leblicq, T.; Smeets, B.; Vanmaercke, S.; Ramon, H.; Saeys, W. A discrete element approach for modelling bendable crop stems. Comput. Electron. Agric. 2016, 124, 141–149. [Google Scholar] [CrossRef]
- Liao, Y.T.; Liao, Q.X.; Zhou, Y.; Wang, Z.T.; Jiang, Y.J.; Liang, F. Parameters Calibration of Discrete Element Model of Fodder Rape Crop Harvest in Bolting Stage. Trans. Chin. Soc. Agric. Mach. 2020, 51, 73–82. [Google Scholar]
- Liu, Z.P.; Xie, F.P.; Wu, M.L. Experimental Study on Mechanics Characteristic for Mature Rape Stalk. J. Agric. Res. 2009, 31, 147–149. [Google Scholar]
- Luo, H.F.; Tang, C.Z.; Guan, C.Y.; Wu, M.L.; Xie, F.P.; Zhou, Y. Plant characteristic research on field rape based on mechanized harvesting adaptability. Trans. Chin. Soc. Agric. Eng. 2010, 26, 61–66. [Google Scholar]
- Ma, Z.; Li, Y.M.; Xu, L.Z. Experimental research of Elastic Mechanics of rape stalks. J. Agric. Res. 2016, 38, 187–191. [Google Scholar]
- Sun, J.B.; Liu, Q.; Yang, F.Z.; Liu, Z.J.; Wang, Z. Calibration of Discrete Element Simulation Parameters of Sloping Soil on Loess Plateau and Its Interaction with Rotary Tillage Components. Trans. Chin. Soc. Agric. Mach. 2022, 53, 63–73. [Google Scholar]
- Xing, J.J.; Zhang, R.; Wu, P.; Zhang, X.R.; Dong, X.H.; Chen, Y.; Ru, S.F. Parameter calibration of discrete element simulation model for latosol particles in hot areas of Hainan Province. Trans. Chin. Soc. Agric. Eng. 2020, 36, 158–166. [Google Scholar]
- Chen, Z.P.; Wassgren, C.; Veikle, E.; Ambrose, K. Determination of material and interaction properties of maize and wheat kernels for DEM simulation. Biosyst. Eng. 2020, 147, 206–225. [Google Scholar] [CrossRef]
- Liu, F.Y.; Zhang, J.; Li, B.; Chen, J. Calibration of parameters of wheat required in discrete element method simulation based on repose angle of particle heap. Trans. Chin. Soc. Agric. Eng. 2016, 32, 247–253. [Google Scholar]
- Xia, Y.D.; Klinger, J.; Bhattacharjee, T.; Thompson, V. The elastoplastic flexural behaviour of corn stalks. Biosyst. Eng. 2022, 216, 218–228. [Google Scholar] [CrossRef]
- Wu, K.; Song, Y.P. Research Progress Analysis of Crop Stalk Cutting Theory and Method. Trans. Chin. Soc. Agric. Eng. 2022, 53, 1–20. [Google Scholar]
- Guo, L.; Wang, D.C.; Tabil, L.G.; Wang, G.H. Compression and relaxation properties of selected biomass for briquetting. Biosyst. Eng. 2016, 148, 101–110. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value | ||
|---|---|---|---|
| Intrinsic parameter | Rape stem | Poisson’s ratio | 0.4 a |
| Density/kg·m−3 | 486 b | ||
| Shear modulus/Pa | 1.1 × 107 a | ||
| Steel | Poisson’s ratio | 0.3 a | |
| Density/kg·m−3 | 7850 a | ||
| Shear modulus/Pa | 7.9 × 1010 a | ||
| Contact parameter | Rape stem–rape stem | Coefficient of restitution (A) | 0.322~0.611 c |
| Coefficient of static friction (B) | 0.381~0.752 c | ||
| Coefficient of rolling friction (C) | 0.013~0.032 c | ||
| Rape stem–steel | Coefficient of restitution (D) | 0.298~0.623 c | |
| Coefficient of static friction (E) | 0.284~0.730 c | ||
| Coefficient of rolling friction (F) | 0.021~0.042 c | ||
| Factor | Level | ||
|---|---|---|---|
| −1 | 0 | 1 | |
| Stiffness per unit area (G)/N·m−3 | 1.0 × 109 | 5.5 × 109 | 1.0 × 1010 |
| Shear Stiffness per unit area (H)/N·m−3 | 1.0 × 108 | 5.5 × 108 | 1.0 × 109 |
| Bonded radius (I)/mm | 1.0 | 1.5 | 2.0 |
| Test No. | A | B | C | D | E | F | y1 |
|---|---|---|---|---|---|---|---|
| 1 | 0.611 | 0.752 | 0.032 | 0.298 | 0.284 | 0.021 | 21.29 |
| 2 | 0.611 | 0.381 | 0.013 | 0.298 | 0.73 | 0.021 | 25.58 |
| 3 | 0.4665 | 0.5665 | 0.0225 | 0.4605 | 0.507 | 0.0315 | 27.18 |
| 4 | 0.611 | 0.752 | 0.013 | 0.298 | 0.284 | 0.042 | 24.89 |
| 5 | 0.611 | 0.381 | 0.032 | 0.623 | 0.73 | 0.021 | 30.33 |
| 6 | 0.611 | 0.752 | 0.013 | 0.623 | 0.73 | 0.042 | 33.60 |
| 7 | 0.4665 | 0.5665 | 0.0225 | 0.4605 | 0.507 | 0.0315 | 26.95 |
| 8 | 0.322 | 0.381 | 0.013 | 0.623 | 0.284 | 0.042 | 24.45 |
| 9 | 0.322 | 0.752 | 0.032 | 0.623 | 0.284 | 0.021 | 20.78 |
| 10 | 0.322 | 0.752 | 0.032 | 0.298 | 0.73 | 0.042 | 25.17 |
| 11 | 0.322 | 0.381 | 0.032 | 0.298 | 0.73 | 0.042 | 34.36 |
| 12 | 0.322 | 0.752 | 0.013 | 0.623 | 0.73 | 0.021 | 26.11 |
| 13 | 0.611 | 0.381 | 0.032 | 0.623 | 0.284 | 0.042 | 25.26 |
| 14 | 0.322 | 0.381 | 0.013 | 0.298 | 0.284 | 0.021 | 17.69 |
| Factor | Standardized Effects | Sum of Squares | Contribution/% | Significance Ranking |
|---|---|---|---|---|
| A | 2.065 | 12.793 | 4.305 | 3 |
| B | −0.972 | 2.832 | 0.953 | 5 |
| C | 0.813 | 1.985 | 0.668 | 6 |
| D | 1.925 | 11.117 | 3.741 | 4 |
| E | 6.800 | 138.720 | 46.687 | 1 |
| F | 4.328 | 56.203 | 18.916 | 2 |
| Test No. | A | D | E | F | y1 |
|---|---|---|---|---|---|
| 1 | 0.322 | 0.298 | 0.507 | 0.0315 | 22.88 |
| 2 | 0.611 | 0.298 | 0.507 | 0.0315 | 23.88 |
| 3 | 0.322 | 0.623 | 0.507 | 0.0315 | 22.77 |
| 4 | 0.611 | 0.623 | 0.507 | 0.0315 | 25.91 |
| 5 | 0.4665 | 0.4605 | 0.284 | 0.021 | 17.98 |
| 6 | 0.4665 | 0.4605 | 0.73 | 0.021 | 24.72 |
| 7 | 0.4665 | 0.4605 | 0.284 | 0.042 | 23.88 |
| 8 | 0.4665 | 0.4605 | 0.73 | 0.042 | 31.40 |
| 9 | 0.322 | 0.4605 | 0.507 | 0.021 | 22.35 |
| 10 | 0.611 | 0.4605 | 0.507 | 0.021 | 26.12 |
| 11 | 0.322 | 0.4605 | 0.507 | 0.042 | 27.40 |
| 12 | 0.611 | 0.4605 | 0.507 | 0.042 | 27.35 |
| 13 | 0.4665 | 0.298 | 0.284 | 0.0315 | 18.58 |
| 14 | 0.4665 | 0.623 | 0.284 | 0.0315 | 17.98 |
| 15 | 0.4665 | 0.298 | 0.73 | 0.0315 | 23.79 |
| 16 | 0.4665 | 0.623 | 0.73 | 0.0315 | 31.40 |
| 17 | 0.322 | 0.4605 | 0.284 | 0.0315 | 20.41 |
| 18 | 0.611 | 0.4605 | 0.284 | 0.0315 | 19.08 |
| 19 | 0.322 | 0.4605 | 0.73 | 0.0315 | 23.87 |
| 20 | 0.611 | 0.4605 | 0.73 | 0.0315 | 29.72 |
| 21 | 0.4665 | 0.298 | 0.507 | 0.021 | 27.25 |
| 22 | 0.4665 | 0.623 | 0.507 | 0.021 | 21.82 |
| 23 | 0.4665 | 0.298 | 0.507 | 0.042 | 26.19 |
| 24 | 0.4665 | 0.623 | 0.507 | 0.042 | 29.29 |
| 25 | 0.4665 | 0.4605 | 0.507 | 0.0315 | 27.18 |
| 26 | 0.4665 | 0.4605 | 0.507 | 0.0315 | 24.72 |
| 27 | 0.4665 | 0.4605 | 0.507 | 0.0315 | 27.01 |
| Source | Coefficient Estimate (Coded Factors) | Sum of Squares | df | Mean Square | F-Value | p-Value |
|---|---|---|---|---|---|---|
| Model | \ | 349.62 | 14 | 24.97 | 11.66 | <0.0001 ** |
| A | 1.03 | 12.8 | 1 | 12.8 | 5.97 | 0.0309 * |
| D | 0.5515 | 3.65 | 1 | 3.65 | 1.70 | 0.2163 |
| E | 3.92 | 183.94 | 1 | 183.94 | 85.85 | <0.0001 ** |
| F | 2.11 | 53.2 | 1 | 53.20 | 24.83 | 0.0003 ** |
| AD | 0.5345 | 1.14 | 1 | 1.14 | 0.53 | 0.4792 |
| AE | 1.80 | 12.89 | 1 | 12.89 | 6.02 | 0.0304 * |
| AF | −0.9551 | 3.65 | 1 | 3.65 | 1.70 | 0.2164 |
| DE | 2.05 | 16.84 | 1 | 16.84 | 7.86 | 0.0159 * |
| DF | 2.13 | 18.19 | 1 | 18.19 | 8.49 | 0.013 * |
| EF | 0.1959 | 0.1535 | 1 | 0.154 | 0.072 | 0.7935 |
| A² | −1.10 | 6.47 | 1 | 6.47 | 3.02 | 0.1077 |
| D² | −1.10 | 6.47 | 1 | 6.47 | 3.02 | 0.1078 |
| E² | −2.22 | 26.23 | 1 | 26.23 | 12.24 | 0.0044 ** |
| F² | 0.6495 | 2.25 | 1 | 2.25 | 1.05 | 0.3257 |
| Intercept | 26.30 | \ | \ | \ | \ | \ |
| Residual | \ | 25.71 | 12 | 2.14 | \ | \ |
| Lack of Fit | \ | 21.94 | 10 | 2.19 | 1.16 | 0.5479 |
| Pure Error | \ | 3.77 | 2 | 1.89 | \ | \ |
| Cor Total | \ | 375.33 | 26 | \ | \ |
| Test No. | G/N·m−3 | H/N·m−3 | I/mm | y2/N |
|---|---|---|---|---|
| 1 | 5.50 × 109 | 1.00 × 109 | 2.0 | 54.80 |
| 2 | 5.50 × 109 | 1.00 × 109 | 1.0 | 16.16 |
| 3 | 1.00 × 1010 | 1.00 × 108 | 1.5 | 35.90 |
| 4 | 1.00 × 109 | 1.00 × 108 | 1.5 | 8.72 |
| 5 | 5.50 × 109 | 5.50 × 108 | 1.5 | 27.60 |
| 6 | 1.00 × 109 | 5.50 × 108 | 1.0 | 4.91 |
| 7 | 5.50 × 109 | 5.50 × 108 | 1.5 | 27.90 |
| 8 | 1.00 × 1010 | 5.50 × 108 | 2.0 | 86.50 |
| 9 | 5.50 × 109 | 1.00 × 108 | 2.0 | 47.80 |
| 10 | 1.00 × 1010 | 5.50 × 108 | 1.0 | 19.26 |
| 11 | 5.50 × 109 | 5.50 × 108 | 1.5 | 25.30 |
| 12 | 1.00 × 1010 | 1.00 × 109 | 1.5 | 41.80 |
| 13 | 5.50 × 109 | 1.00 × 108 | 1.0 | 14.51 |
| 14 | 1.00 × 109 | 5.50 × 108 | 2.0 | 31.20 |
| 15 | 1.00 × 109 | 1.00 × 109 | 1.5 | 12.43 |
| Source | Coefficient Estimate (Coded Factors) | Sum of Squares | df | Mean Square | F-Value | p-Value |
|---|---|---|---|---|---|---|
| Model | \ | 6184.30 | 9 | 687.14 | 40.93 | 0.0004 ** |
| G | 15.77 | 1990.80 | 1 | 1990.80 | 118.59 | 0.0001 ** |
| H | 2.28 | 41.68 | 1 | 41.68 | 2.48 | 0.1759 |
| I | 20.68 | 3422.13 | 1 | 3422.13 | 203.86 | <0.0001 ** |
| GH | 0.5475 | 1.20 | 1 | 1.20 | 0.0714 | 0.7999 |
| GI | 10.24 | 419.23 | 1 | 419.23 | 24.97 | 0.0041 ** |
| HI | 1.34 | 7.16 | 1 | 7.16 | 0.4263 | 0.5426 |
| G² | −0.0354 | 0.0046 | 1 | 0.0046 | 0.0003 | 0.9874 |
| H² | −2.19 | 17.63 | 1 | 17.63 | 1.05 | 0.3524 |
| I² | 8.57 | 271.15 | 1 | 271.15 | 16.15 | 0.0101 * |
| Intercept | 26.93 | \ | \ | \ | \ | \ |
| Residual | \ | 83.93 | 5 | 16.79 | ||
| Lack of Fit | \ | 79.89 | 3 | 26.63 | 13.16 | 0.0714 |
| Pure Error | \ | 4.05 | 2 | 2.02 | \ | \ |
| Cor Total | \ | 6268.24 | 14 | \ | \ | \ |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guan, Z.; Mu, S.; Li, H.; Jiang, T.; Zhang, M.; Wu, C. Flexible DEM Model Development and Parameter Calibration for Rape Stem. Appl. Sci. 2022, 12, 8394. https://doi.org/10.3390/app12178394
Guan Z, Mu S, Li H, Jiang T, Zhang M, Wu C. Flexible DEM Model Development and Parameter Calibration for Rape Stem. Applied Sciences. 2022; 12(17):8394. https://doi.org/10.3390/app12178394
Chicago/Turabian StyleGuan, Zhuohuai, Senlin Mu, Haitong Li, Tao Jiang, Min Zhang, and Chongyou Wu. 2022. "Flexible DEM Model Development and Parameter Calibration for Rape Stem" Applied Sciences 12, no. 17: 8394. https://doi.org/10.3390/app12178394
APA StyleGuan, Z., Mu, S., Li, H., Jiang, T., Zhang, M., & Wu, C. (2022). Flexible DEM Model Development and Parameter Calibration for Rape Stem. Applied Sciences, 12(17), 8394. https://doi.org/10.3390/app12178394