
Layered-Cost-Map-Based Traffic Management for Multiple AMRs via a DDS


Abstract
:1. Introduction
2. Related Works
3. Methods
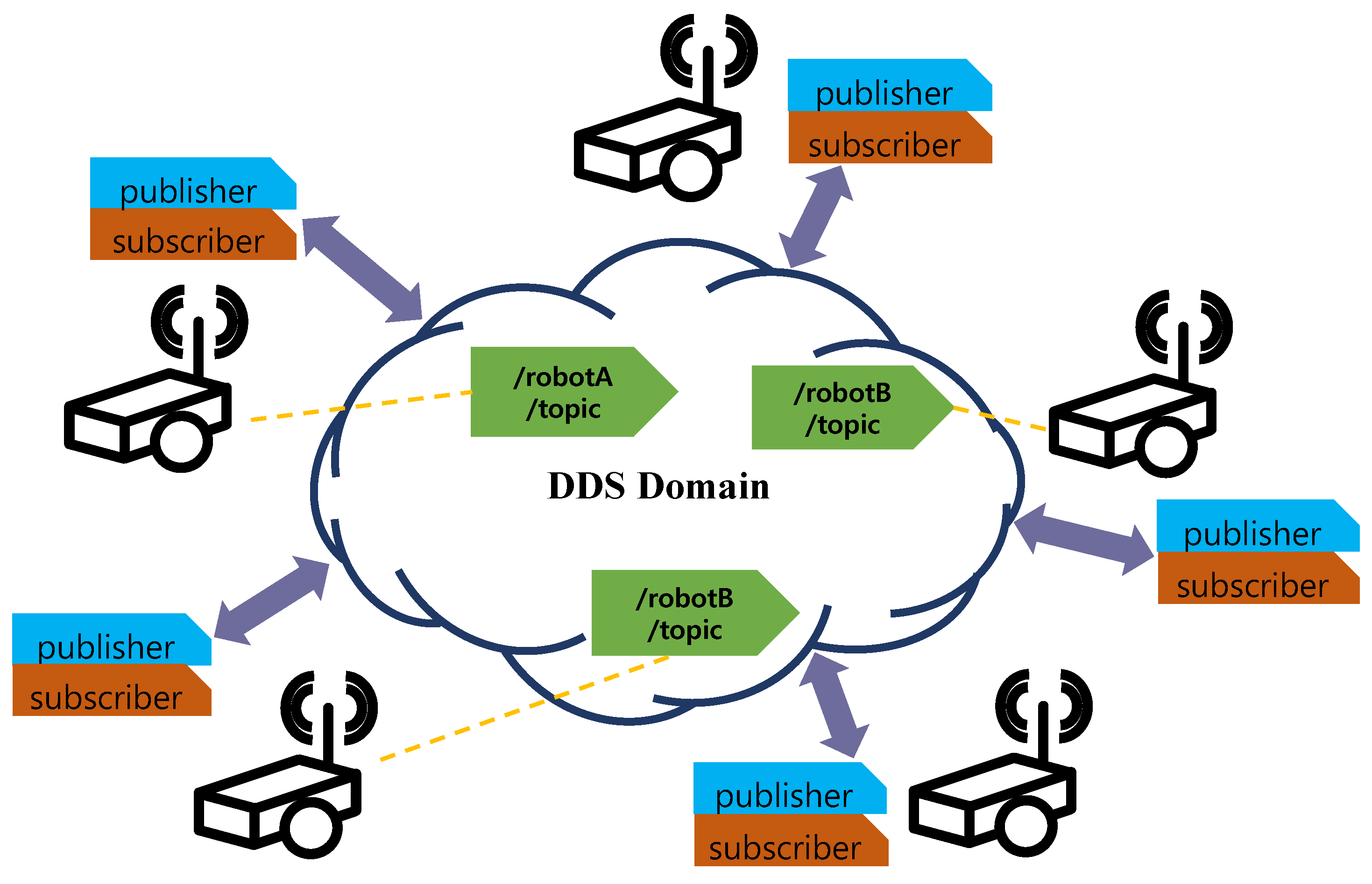
3.1. Data Distribution Service
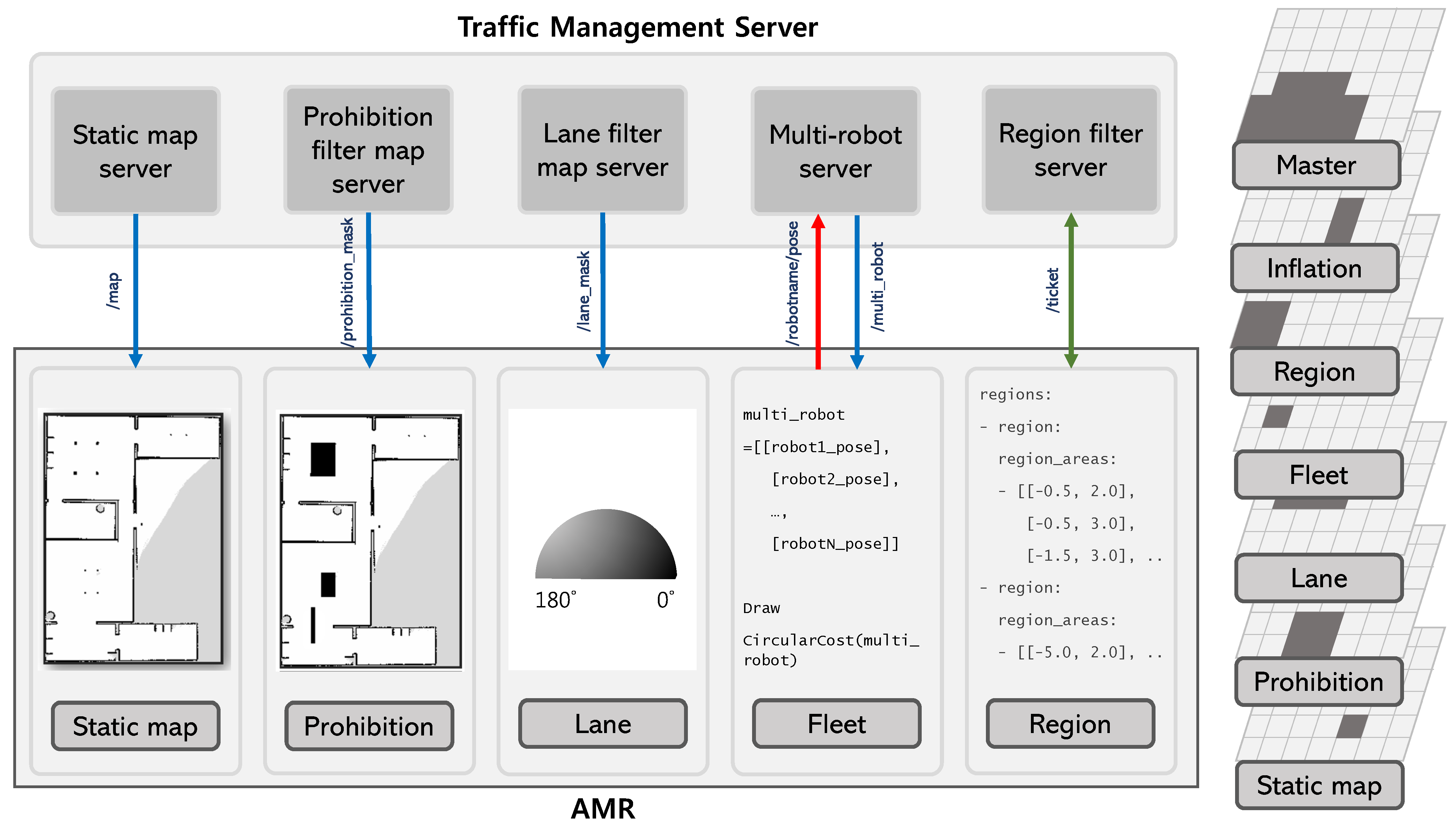
3.2. Layered Cost Map
3.2.1. Filters
| Algorithm 1 Lane filter |
|
| Algorithm 2 Region filter |
|
3.2.2. Fleet Layer
4. Experimental Results
4.1. Hardware Settings
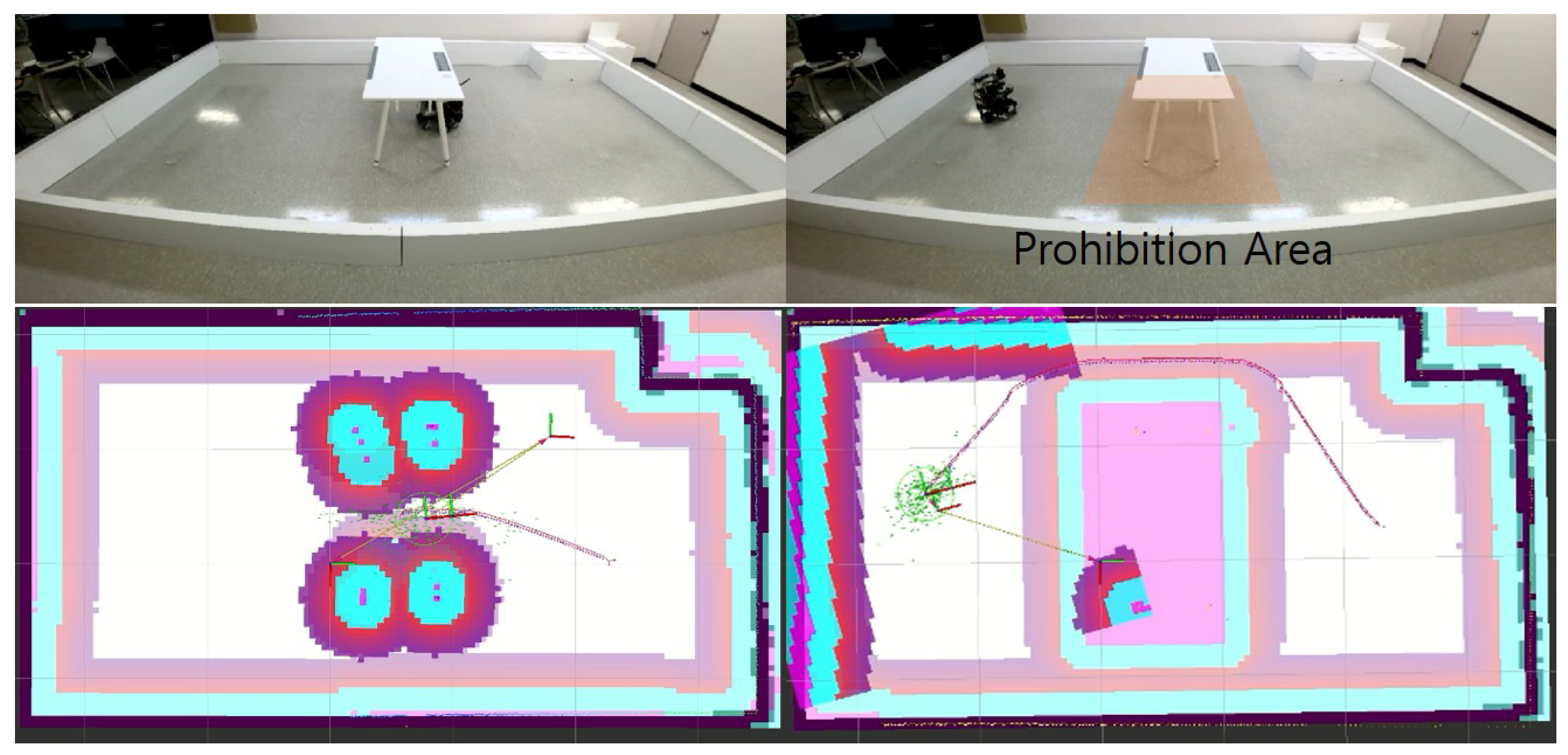
4.2. Prohibition Filter
4.3. Lane Filter
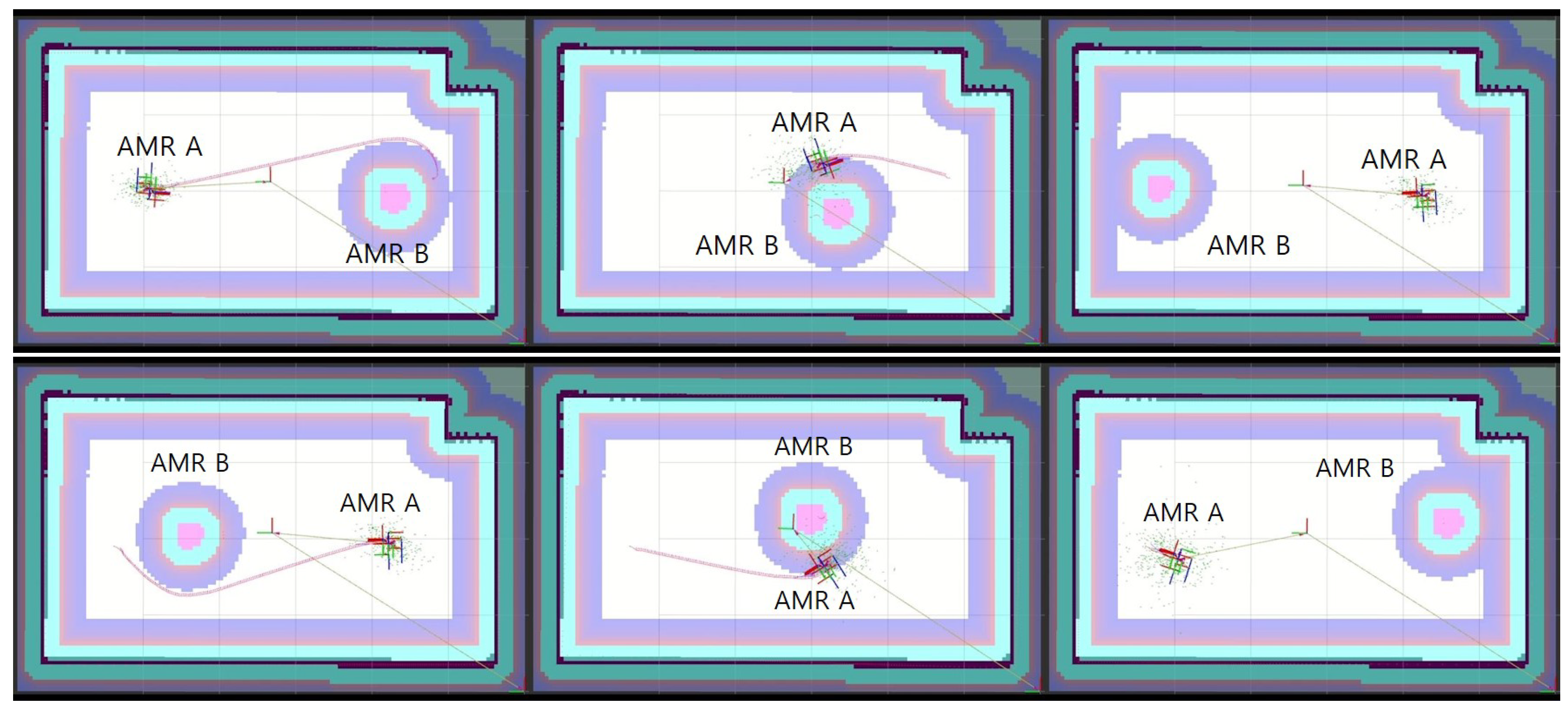
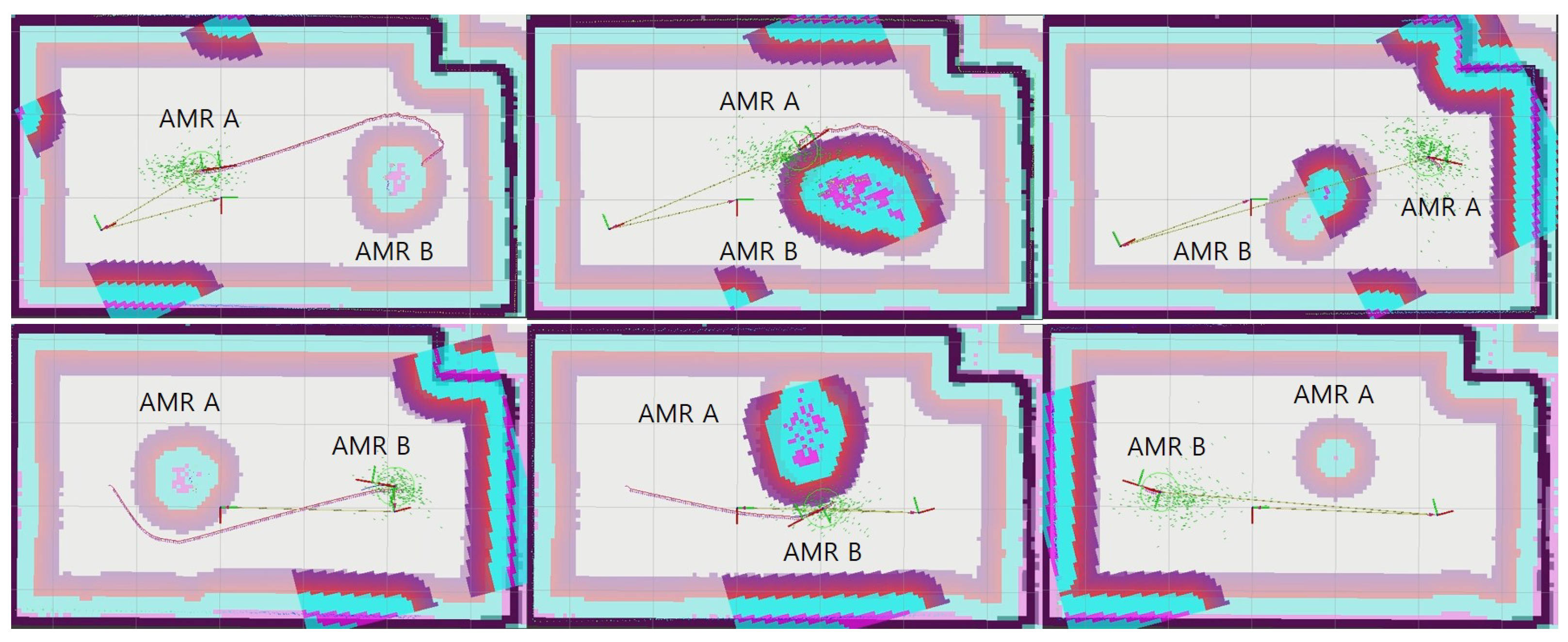
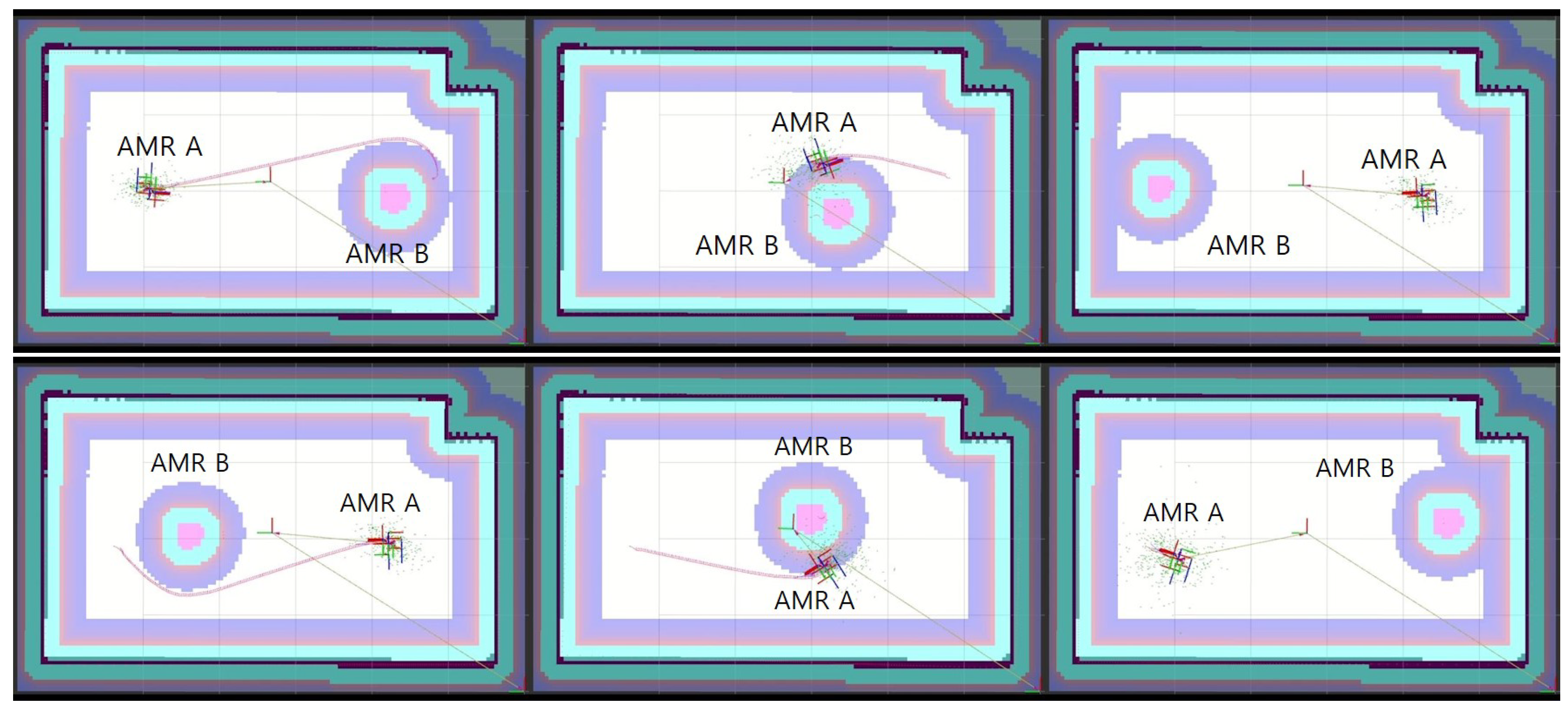
4.4. Fleet Layer
4.5. Region Filter
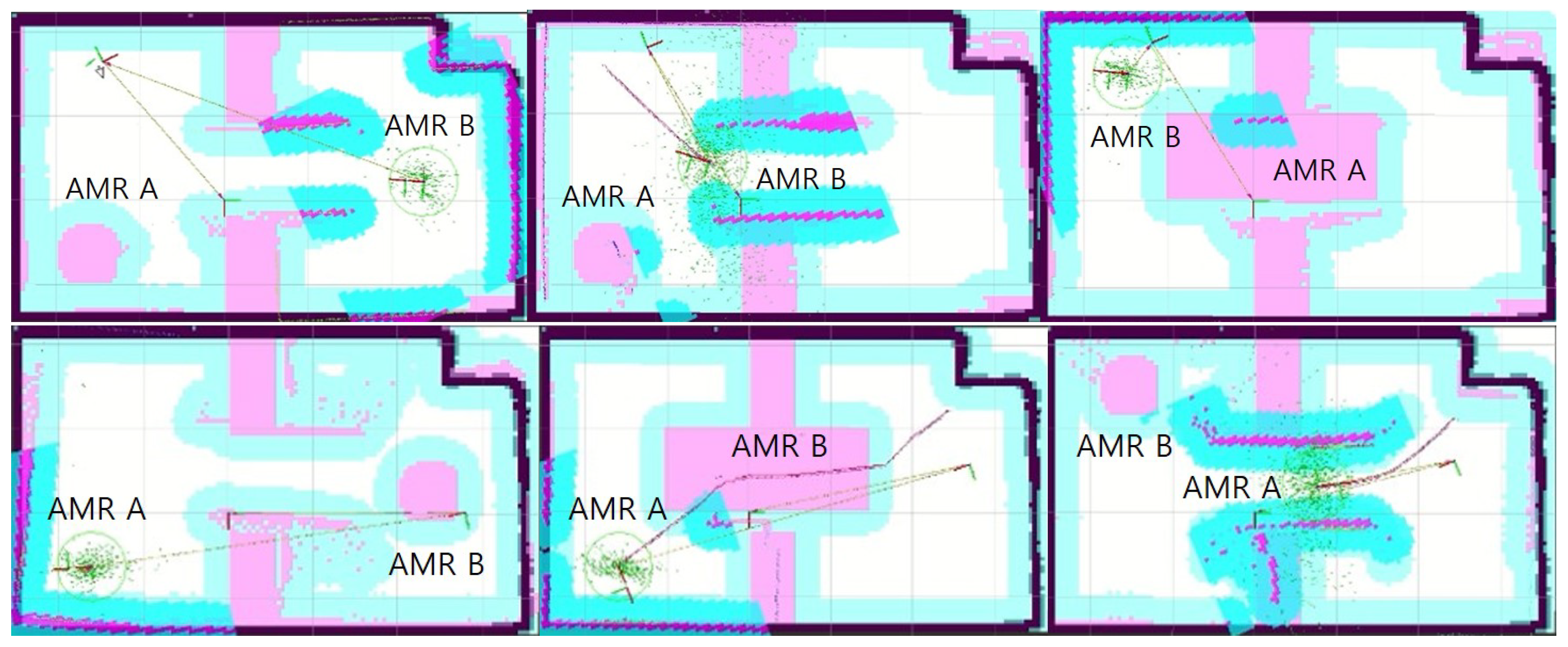
4.5.1. Narrow Path
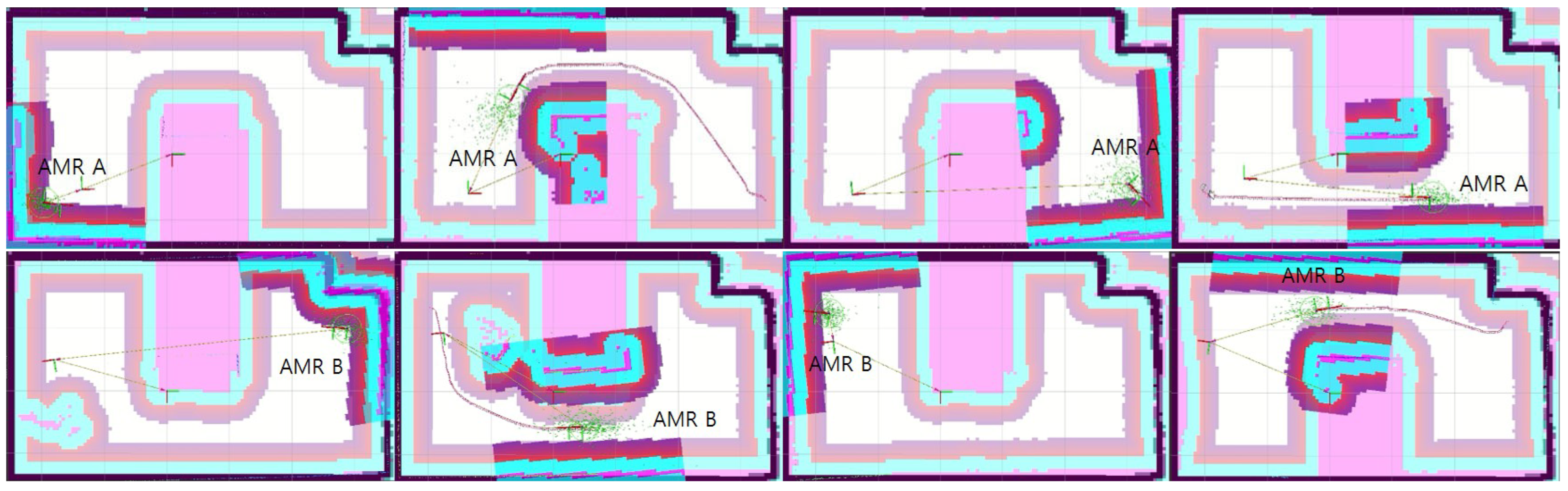
4.5.2. Exclusive Working Area
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Zhong, X.; Tian, J.; Hu, H.; Peng, X. Hybrid path planning based on safe A* algorithm and adaptive window approach for mobile robot in large-scale dynamic environment. J. Intell. Robot. Syst. 2020, 99, 65–77. [Google Scholar] [CrossRef]
- Niijima, S.; Umeyama, R.; Sasaki, Y.; Mizoguchi, H. City-scale grid-topological hybrid maps for autonomous mobile robot navigation in urban area. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 2065–2071. [Google Scholar]
- Wang, X.; Mizukami, Y.; Tada, M.; Matsuno, F. Navigation of a mobile robot in a dynamic environment using a point cloud map. Artif. Life Robot. 2021, 26, 10–20. [Google Scholar] [CrossRef]
- Yonetani, R.; Taniai, T.; Barekatain, M.; Nishimura, M.; Kanezaki, A. Path planning using neural a* search. In Proceedings of the 38th International Conference on Machine Learning, Virtual, 18–24 July 2021; pp. 12029–12039. [Google Scholar]
- Karur, K.; Sharma, N.; Dharmatti, C.; Siegel, J.E. A survey of path planning algorithms for mobile robots. Vehicles 2021, 3, 448–468. [Google Scholar] [CrossRef]
- Zając, J.; Małopolski, W. Structural on-line control policy for collision and deadlock resolution in multi-AGV systems. J. Manuf. Syst. 2021, 60, 80–92. [Google Scholar] [CrossRef]
- Zhong, M.; Yang, Y.; Dessouky, Y.; Postolache, O. Multi-AGV scheduling for conflict-free path planning in automated container terminals. Comput. Ind. Eng. 2020, 142, 106371. [Google Scholar] [CrossRef]
- Draganjac, I.; Petrović, T.; Miklić, D.; Kovačić, Z.; Oršulić, J. Highly-scalable traffic management of autonomous industrial transportation systems. Robot. Comput.-Integr. Manuf. 2020, 63, 101915. [Google Scholar] [CrossRef]
- Fanti, M.P.; Mangini, A.M.; Pedroncelli, G.; Ukovich, W. A decentralized control strategy for the coordination of AGV systems. Control Eng. Pract. 2018, 70, 86–97. [Google Scholar] [CrossRef]
- Lian, Y.; Yang, Q.; Xie, W.; Zhang, L. Cyber-Physical System-Based Heuristic Planning and Scheduling Method for Multiple Automatic Guided Vehicles in Logistics Systems. IEEE Trans. Ind. Inform. 2021, 17, 7882–7893. [Google Scholar] [CrossRef]
- Pratissoli, F.; Battilani, N.; Fantuzzi, C.; Sabattini, L. Hierarchical and Flexible Traffic Management of Multi-AGV Systems Applied to Industrial Environments. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 10009–10015. [Google Scholar] [CrossRef]
- Yang, M.; Bian, Y.; Ma, L.; Liu, G.; Zhang, H. Research on Traffic Control Algorithm Based on Multi-AGV Path Planning. In Proceedings of the 2021 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Melbourne, Australia, 17–20 October 2021; pp. 697–702. [Google Scholar] [CrossRef]
- Hu, H.; Jia, X.; Liu, K.; Sun, B. Self-Adaptive Traffic Control Model With Behavior Trees and Reinforcement Learning for AGV in Industry 4.0. IEEE Trans. Ind. Inform. 2021, 17, 7968–7979. [Google Scholar] [CrossRef]
- Fang, F.; Shi, M.; Qian, K.; Zhou, B.; Gan, Y. A human-aware navigation method for social robot based on multi-layer cost map. Int. J. Intell. Robot. Appl. 2020, 4, 308–318. [Google Scholar] [CrossRef]
- Teja Singamaneni, P.; Favier, A.; Alami, R. Human-Aware Navigation Planner for Diverse Human-Robot Interaction Contexts. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September–1 October 2021; pp. 5817–5824. [Google Scholar] [CrossRef]
- Mayoral, J.C.; Grimstad, L.; From, P.J.; Cielniak, G. Integration of a Human-aware Risk-based Braking System into an Open-Field Mobile Robot. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 2435–2442. [Google Scholar] [CrossRef]
- Morales, Y.; Watanabe, A.; Ferreri, F.; Even, J.; Ikeda, T.; Shinozawa, K.; Miyashita, T.; Hagita, N. Including human factors for planning comfortable paths. In Proceedings of the 2015 IEEE International Conference on Robotics and Automation (ICRA), Seattle, WA, USA, 26–30 May 2015; pp. 6153–6159. [Google Scholar] [CrossRef]
- Talebpour, Z.; Martinoli, A. Multi-Robot Coordination in Dynamic Environments Shared with Humans. In Proceedings of the 2018 IEEE International Conference on Robotics and Automation (ICRA), Brisbane, Australia, 21–25 May 2018; pp. 4593–4600. [Google Scholar] [CrossRef]
- Kollmitz, M.; Hsiao, K.; Gaa, J.; Burgard, W. Time dependent planning on a layered social cost map for human-aware robot navigation. In Proceedings of the 2015 European Conference on Mobile Robots (ECMR), Lincoln, UK, 2–4 September 2015; pp. 1–6. [Google Scholar] [CrossRef]
- Ramírez, O.A.I.; Khambhaita, H.; Chatila, R.; Chetouani, M.; Alami, R. Robots learning how and where to approach people. In Proceedings of the 2016 25th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), New York, NY, USA, 26–31 August 2016; pp. 347–353. [Google Scholar] [CrossRef]
- Naik, L.; Palinko, O.; Bodenhagen, L.; Krüger, N. Multi-modal Proactive Approaching of Humans for Human-Robot Cooperative Tasks. In Proceedings of the 2021 30th IEEE International Conference on Robot Human Interactive Communication (RO-MAN), Vancouver, BC, Canada, 8–12 August 2021; pp. 323–329. [Google Scholar] [CrossRef]
- Truong, X.T.; Ngo, T.D. “To Approach Humans?”: A Unified Framework for Approaching Pose Prediction and Socially Aware Robot Navigation. IEEE Trans. Cogn. Dev. Syst. 2018, 10, 557–572. [Google Scholar] [CrossRef]
- Renault, B.; Saraydaryan, J.; Simonin, O. Modeling a Social Placement Cost to Extend Navigation Among Movable Obstacles (NAMO) Algorithms. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 11345–11351. [Google Scholar] [CrossRef]
- Okal, B.; Arras, K.O. Learning socially normative robot navigation behaviors with Bayesian inverse reinforcement learning. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016; pp. 2889–2895. [Google Scholar] [CrossRef]
- Lim, J.; Ha, S.; Choi, J. Prediction of reward functions for deep reinforcement learning via Gaussian process regression. IEEE/ASME Trans. Mechatron. 2020, 25, 1739–1746. [Google Scholar] [CrossRef]
- Ellis, C.; Wigness, M.; Rogers, J.; Lennon, C.; Fiondella, L. Risk Averse Bayesian Reward Learning for Autonomous Navigation from Human Demonstration. In Proceedings of the 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, Czech Republic, 27 September 2021–1 October 2021; pp. 8928–8935. [Google Scholar] [CrossRef]
- Sivaprakasam, M.; Triest, S.; Wang, W.; Yin, P.; Scherer, S. Improving Off-road Planning Techniques with Learned Costs from Physical Interactions. In Proceedings of the 2021 IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May 2021–5 June 2021; pp. 4844–4850. [Google Scholar] [CrossRef]
- Ugur, D.; Bebek, O. Fast and Efficient Terrain-Aware Motion Planning for Exploration Rovers. In Proceedings of the 2021 IEEE 17th International Conference on Automation Science and Engineering (CASE), Lyon, France, 23–27 August 2021; pp. 1561–1567. [Google Scholar] [CrossRef]
- Paz-Delgado, G.J.; Azkarate, M.; Sánchez-Ibáñez, J.R.; Pérez-del Pulgar, C.J.; Gerdes, L.; García-Cerezo, A.J. Improving Autonomous Rover Guidance in Round-Trip Missions Using a Dynamic Cost Map. In Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, NV, USA, 24 October 2020–24 January 2021; pp. 7014–7019. [Google Scholar] [CrossRef]
- Wang, C.; Meng, L.; She, S.; Mitchell, I.M.; Li, T.; Tung, F.; Wan, W.; Meng, M.Q.H.; de Silva, C.W. Autonomous mobile robot navigation in uneven and unstructured indoor environments. In Proceedings of the 2017 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, BC, Canada, 24–28 September 2017; pp. 109–116. [Google Scholar] [CrossRef]
- Regier, P.; Oßwald, S.; Karkowski, P.; Bennewitz, M. Foresighted navigation through cluttered environments. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 1437–1442. [Google Scholar] [CrossRef]
- Pardo-Castellote, G. OMG Data-Distribution Service: Architectural overview. In Proceedings of the 2003 Proceedings—23rd International Conference on Distributed Computing Systems Workshops, Providence, RI, USA, 19–22 May 2003; pp. 200–206. [Google Scholar] [CrossRef]
- Lu, D.V.; Hershberger, D.; Smart, W.D. Layered costmaps for context-sensitive navigation. In Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems, Chicago, IL, USA, 14–18 September 2014; pp. 709–715. [Google Scholar] [CrossRef]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Category | Function | Type |
|---|---|---|
| Prohibition filter | To prevent AMRs from trespassing on an area | 8-bit image |
| Lane filter | To set AMRs’ driving direction | 16-bit image |
| Fleet layer | To share the position of each AMR | None |
| Region filter | To occupy an area exclusively | Parameter text file |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Jeong, S.; Ga, T.; Jeong, I.; Oh, J.; Choi, J. Layered-Cost-Map-Based Traffic Management for Multiple AMRs via a DDS. Appl. Sci. 2022, 12, 8084. https://doi.org/10.3390/app12168084
Jeong S, Ga T, Jeong I, Oh J, Choi J. Layered-Cost-Map-Based Traffic Management for Multiple AMRs via a DDS. Applied Sciences. 2022; 12(16):8084. https://doi.org/10.3390/app12168084
Chicago/Turabian StyleJeong, Seungwoo, Taekwon Ga, Inhwan Jeong, Jongkyu Oh, and Jongeun Choi. 2022. "Layered-Cost-Map-Based Traffic Management for Multiple AMRs via a DDS" Applied Sciences 12, no. 16: 8084. https://doi.org/10.3390/app12168084
APA StyleJeong, S., Ga, T., Jeong, I., Oh, J., & Choi, J. (2022). Layered-Cost-Map-Based Traffic Management for Multiple AMRs via a DDS. Applied Sciences, 12(16), 8084. https://doi.org/10.3390/app12168084