
Smart-Median: A New Real-Time Algorithm for Smoothing Singing Pitch Contours



Abstract
Featured Application
Abstract
1. Introduction
2. Materials and Methods
2.1. Dataset
2.2. Ground Truth
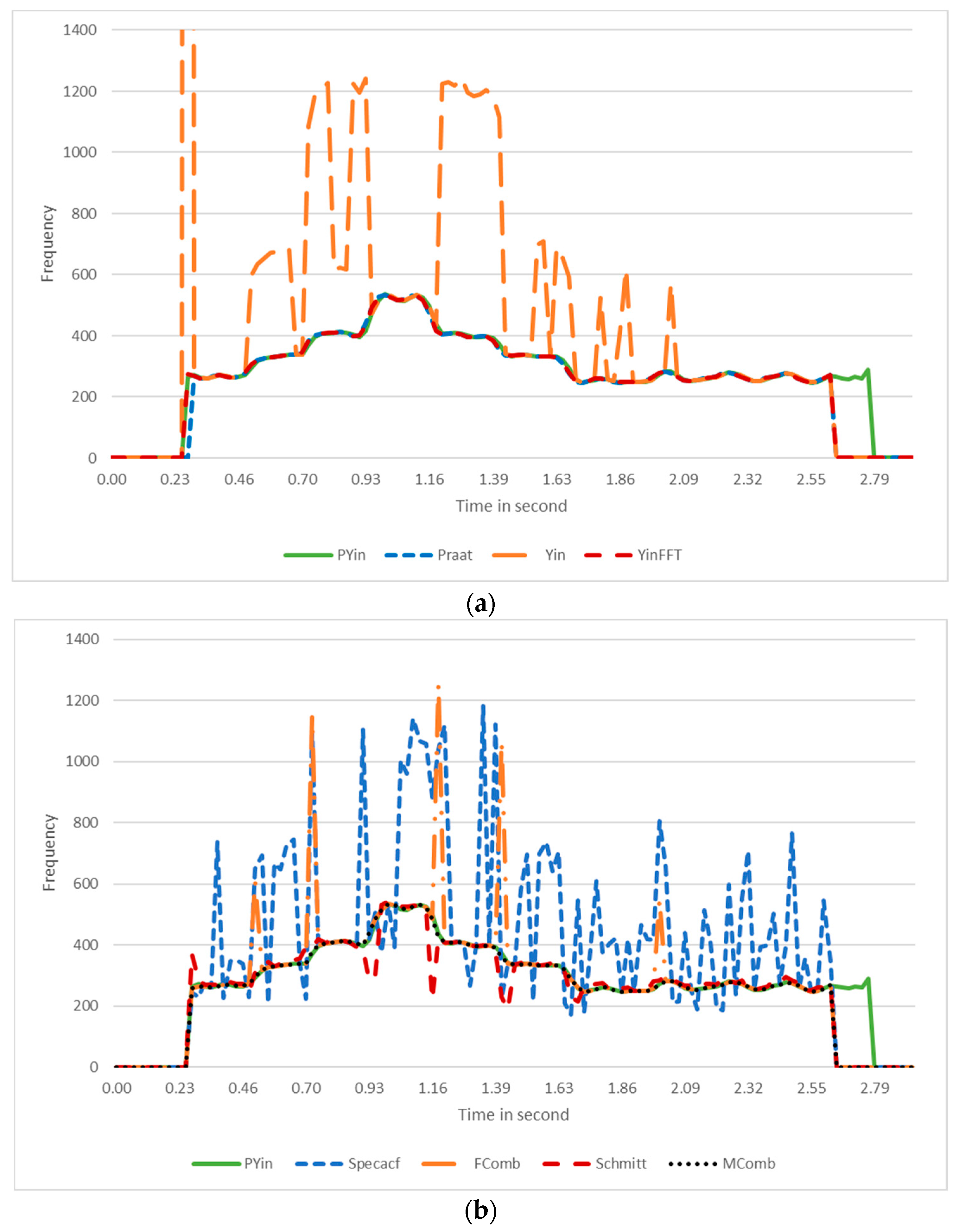
2.3. Pitch Detection Algorithms to Generate Pitch Contours
2.4. Evaluation Method
2.4.1. R-Squared (R2)
2.4.2. Root-Mean-Square Error (RMSE)
2.4.3. Mean-Absolute-Error (MAE)
2.4.4. F0 Frame Error (FFE)
3. Current Contour Smoother Algorithms
3.1. Gaussian Filter
3.2. Savitzky–Golay Filter
3.3. Exponential Filter
3.4. Window-Based Finite Impulse Response Filter
3.4.1. Rectangular Window
3.4.2. Hanning Window
3.4.3. Hamming Window
3.4.4. Bartlett Window
3.4.5. Blackman Window
3.5. Direct Spectral Filter
3.6. Polynomial
3.7. Spline
3.8. Binner
3.9. Locally Weighted Scatterplot Smoothing (LOWESS) Smoother
3.10. Seasonal Decomposition
3.11. Kalman Filter
3.12. Moving Average
3.13. Median Filter
3.14. Okada Filter
3.15. Jlassi Filter
4. Smart-Median: A Real-Time Pitch Contour Smoother Algorithm
4.1. Considerations
- Only the incorrectly estimated pitches need to be changed. Therefore, it is necessary to decide which jumps in a contour are incorrect.
- To calculate the median, some of the estimated pitches around the incorrectly detected F0 should be selected. This represents the window length for calculating the median. Therefore, the decision on the number of estimated pitches before and/or after the erroneously estimated pitches provides the median window length. Thus, a delay is required in real-time scenarios to ensure sufficient successive pitch frequencies are available when correcting the current pitch frequency.
- There is a minimum duration for which a human can sing.
- There is a minimum duration for which a human can rest between singing two notes.
- There is a maximum frequency that a human can sing
- There is a maximum interval during which humans can move from one note to another when singing.
- A large pitch interval in a very short time is impossible.
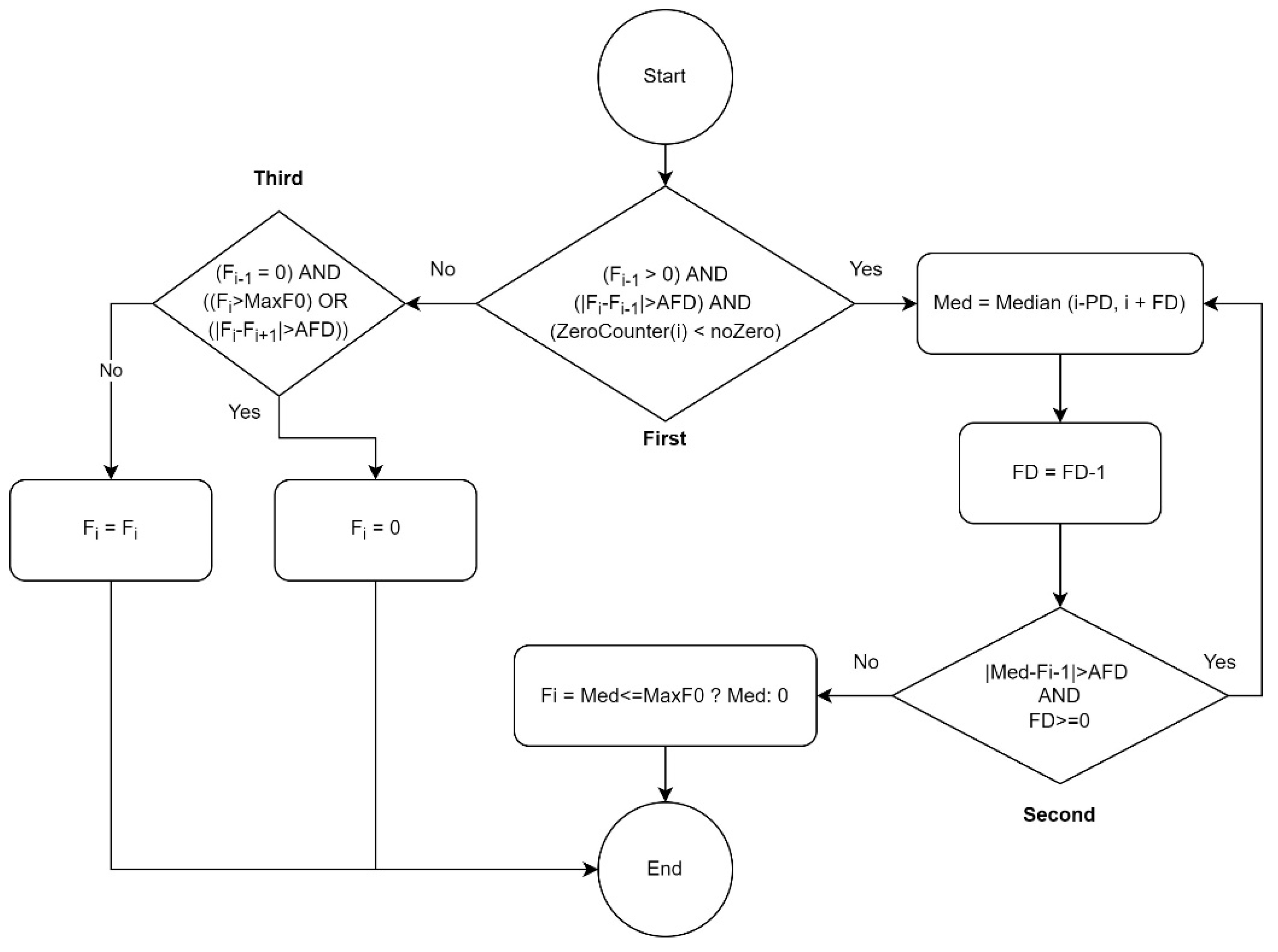
4.2. Smart-Median Algorithm
- Fi refers to the frequency at index i.
- AFD (Acceptable Frequency Difference) indicates the maximum pitch frequency interval acceptable for jumping between two consequent detected pitches. In two studies on speech contour-smoother algorithms [2,20], 30 Hz was selected as the AFD according to the researchers’ experiences. Because the frequency range that humans use for singing is wider than for speaking, a larger AFD is needed for singing. According to the dataset used, the largest interval between two consequently notes sung by men was from C4 to F4, at frequencies of approximately 261 Hz and 349 Hz, respectively, so the maximum interval was 88 Hz for men. The largest interval between notes sung by women was C5 to F5, at frequencies of approximately 523 Hz and 698 Hz, respectively. Therefore, the biggest interval for women was 175 Hz. According to our observations of pitch contours, the human voice cannot physically produce such a big jump within a 30 ms timestep; i.e., for moving from C4 to F4 or from C5 to F5, more than 30 ms is needed. Therefore, it was found that an AFD with a value of 75 Hz was an acceptable choice for pitch contours comprised mostly of frequencies less than 300 Hz (male voices). For those with frequencies that mostly greater than 300 Hz (female singers), 110 Hz was a good choice of AFD.
- noZero: this is the minimum number of consequent zero pitch frequencies that should be considered a correctly estimated silence or rest. In this study, 50 milliseconds was regarded as the minimum duration for silence to be accepted as correct [43]; otherwise, the silence requires adjustment to the local median value.
- The ZeroCounter(i) method calculates how many frequencies (pitches) of zero value exist after index i. The reason for checking the number of zero values (silence) is to ascertain whether or not the pitch detector algorithm has estimated a region of silence correctly or in error.
- Median(i,j): calculates the median based on pitch frequencies from index i to index j.
- PD (Prior Distance): this indicates how many estimated pitches before the current pitch frequency should be considered for the median. In this study, the PD was calculated to cover three estimated pitch frequencies, approximately 35 and 70 milliseconds for men’s and women’s voices, respectively. Nevertheless, the algorithm does not need to wait until this duration becomes available, e.g., at a time of 20 milliseconds, covering 20 milliseconds with PD is sufficient.
- FD (Following Distance): indicates how many estimated pitches after the current pitch frequency should be considered for the median. In this study, the number three was assigned to FD, meaning that to calculate the median of the current wrongly estimated pitch required 35 milliseconds for women’s voices and 70 milliseconds for men’s voices. Therefore, in real-time environments a delay is required until three more estimated pitches are available.
- MaxF0: indicates the maximum acceptable frequency. In this study, for male voices, a value of 600 Hz (near to tenor) and for female voices, a maximum of 1050 Hz (soprano) were considered for MaxF0. Rarely, male and female voices may exceed these boundaries. However, if the singer’s voice range is higher than these boundaries, a higher value can be considered for MaxF0.
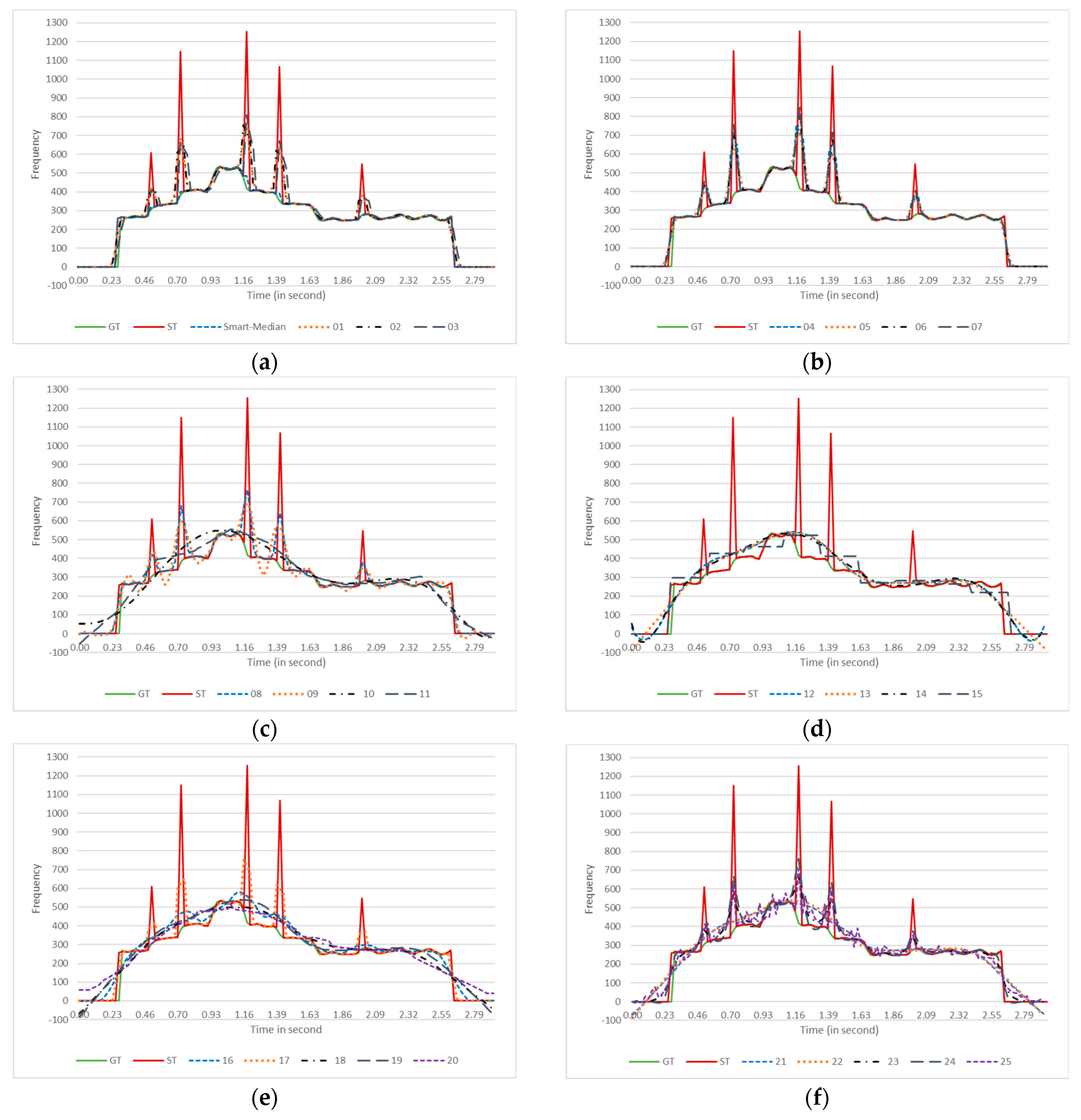
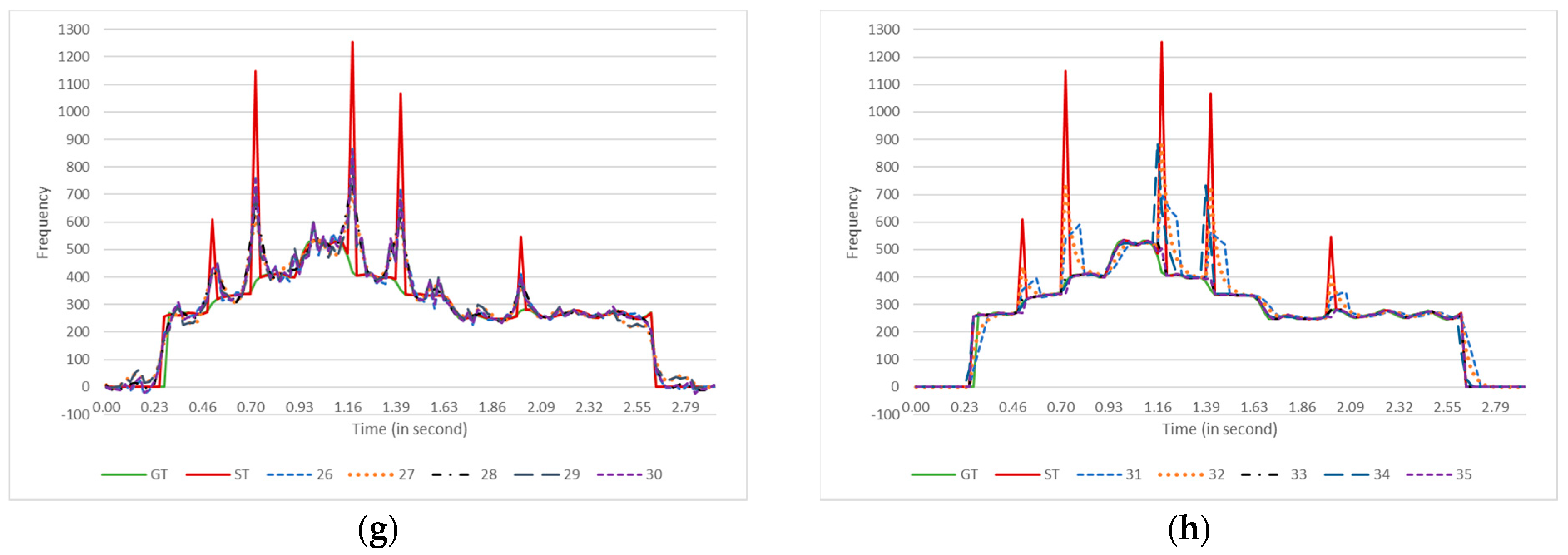
5. Results
6. Discussion
6.1. Comparing the Results of Each Metric
6.2. Comparing Moving Average, Median, Okada, Jlassi, and Smart-Median
6.3. Accuracy of the Contour Smoother Algorithms
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A. The Python Libraries Used

{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Library | Pitch Detection Algorithm |
|---|---|
| Aubio [26] | YinFFT, FComb, MComb, Schmitt, and Specacf |
| Librosa [45] | PYin |
| Python Library | Smoother Algorithm |
|---|---|
| TSmoothie (https://pypi.org/project/tsmoothie/, accessed on 1 February 2022) | Exponential, Window-based (Convolution), Direct Spectral, Polynomial, Spline, Gaussian (code 14), Lowess, Decompose, Kalman |
| Scipy [46] | Savitzky–Golay filter, Gaussian (code 01), Median |
| Pandas [47] | Moving average |
| Python Library | Metric |
|---|---|
| Sklearn [48] | Mean Squared Error, Mean Absolute Error, R2 Score |
Appendix B. Comparisons of Contour Smoother Algorithms
| Algorithm | Specacf | Schmitt | FComb | MComb | Yin | YinFFT | Praat | PYin (GT) | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | |
| 00 | 256 | 123 | 208 | 68 | 61 | 26 | 123 | 42 | 108 | 46 | 32 | 28 | 588 | 114 | 543 | 61 | 26 | 39 | 14 | 14 | 0.7 | 0 | 1.2 | 1.2 |
| 01 | 256 | 233 | 112 | 68 | 63 | 20 | 123 | 122 | 56 | 46 | 47 | 15 | 588 | 581 | 291 | 61 | 60 | 35 | 14 | 14 | 0.2 | 0 | 3 | 3 |
| 02 | 256 | 236 | 128 | 68 | 64 | 21 | 123 | 122 | 59 | 46 | 47 | 15 | 588 | 584 | 316 | 61 | 60 | 37 | 14 | 14 | 0.2 | 0 | 2.7 | 2.7 |
| 03 | 256 | 234 | 118 | 68 | 62 | 26 | 123 | 122 | 62 | 46 | 47 | 20 | 588 | 583 | 302 | 61 | 58 | 40 | 14 | 13 | 1.2 | 0 | 5.5 | 5.5 |
| 04 | 256 | 236 | 128 | 68 | 64 | 21 | 123 | 122 | 59 | 46 | 47 | 15 | 588 | 584 | 316 | 61 | 60 | 37 | 14 | 14 | 0.2 | 0 | 2.7 | 2.7 |
| 05 | 256 | 232 | 124 | 68 | 63 | 23 | 123 | 122 | 63 | 46 | 48 | 17 | 588 | 582 | 325 | 61 | 60 | 40 | 14 | 14 | 0.3 | 0 | 3.4 | 3.4 |
| 06 | 256 | 235 | 104 | 68 | 64 | 18 | 123 | 122 | 51 | 46 | 47 | 13 | 588 | 582 | 266 | 61 | 60 | 32 | 14 | 14 | 0.2 | 0 | 2.5 | 2.5 |
| 07 | 256 | 237 | 96 | 68 | 64 | 16 | 123 | 122 | 44 | 46 | 47 | 11 | 588 | 584 | 237 | 61 | 60 | 28 | 14 | 14 | 0.1 | 0 | 2 | 2 |
| 08 | 256 | 233 | 113 | 68 | 64 | 20 | 123 | 122 | 56 | 46 | 47 | 15 | 588 | 582 | 291 | 61 | 60 | 35 | 14 | 14 | 0.2 | 0 | 2.9 | 2.9 |
| 09 | 256 | 244 | 147 | 68 | 69 | 30 | 123 | 137 | 83 | 46 | 54 | 24 | 588 | 743 | 545 | 61 | 77 | 59 | 14 | 14 | 0.5 | 0 | 5.6 | 5.6 |
| 10 | 256 | 226 | 208 | 68 | 77 | 72 | 123 | 138 | 146 | 46 | 72 | 64 | 588 | 628 | 624 | 61 | 87 | 100 | 14 | 43 | 38.2 | 0 | 44.3 | 44.3 |
| 11 | 256 | 227 | 184 | 68 | 68 | 55 | 123 | 131 | 122 | 46 | 59 | 46 | 588 | 626 | 567 | 61 | 74 | 81 | 14 | 21 | 13.4 | 0 | 23.6 | 23.6 |
| 12 | 256 | 227 | 181 | 68 | 68 | 52 | 123 | 131 | 120 | 46 | 58 | 44 | 588 | 648 | 579 | 61 | 74 | 79 | 14 | 21 | 13.1 | 0 | 21.5 | 21.5 |
| 13 | 256 | 227 | 190 | 68 | 71 | 59 | 123 | 133 | 128 | 46 | 63 | 52 | 588 | 613 | 580 | 61 | 77 | 87 | 14 | 21 | 13.9 | 0 | 28.7 | 28.7 |
| 14 | 256 | 226 | 186 | 68 | 68 | 56 | 123 | 132 | 127 | 46 | 60 | 48 | 588 | 660 | 619 | 61 | 77 | 84 | 14 | 22 | 14.3 | 0 | 24.2 | 24.2 |
| 15 | 256 | 227 | 189 | 68 | 72 | 61 | 123 | 132 | 126 | 46 | 64 | 53 | 588 | 580 | 535 | 61 | 76 | 84 | 14 | 25 | 17.5 | 0 | 31.2 | 31.2 |
| 16 | 256 | 223 | 168 | 68 | 64 | 44 | 123 | 123 | 104 | 46 | 53 | 37 | 588 | 580 | 478 | 61 | 66 | 67 | 14 | 18 | 10 | 0 | 16.9 | 16.9 |
| 17 | 256 | 236 | 128 | 68 | 64 | 21 | 123 | 122 | 59 | 46 | 47 | 15 | 588 | 584 | 316 | 61 | 60 | 37 | 14 | 14 | 0.2 | 0 | 2.7 | 2.7 |
| 18 | 256 | 214 | 195 | 68 | 69 | 64 | 123 | 126 | 132 | 46 | 62 | 55 | 588 | 571 | 569 | 61 | 74 | 88 | 14 | 23 | 15.8 | 0 | 31.1 | 31.1 |
| 19 | 256 | 227 | 190 | 68 | 71 | 59 | 123 | 133 | 128 | 46 | 63 | 52 | 588 | 613 | 580 | 61 | 77 | 87 | 14 | 21 | 13.9 | 0 | 28.7 | 28.7 |
| 20 | 256 | 227 | 190 | 68 | 71 | 59 | 123 | 133 | 128 | 46 | 63 | 52 | 588 | 613 | 580 | 61 | 77 | 87 | 14 | 21 | 13.9 | 0 | 28.7 | 28.7 |
| 21 | 264 | 227 | 189 | 68 | 66 | 56 | 128 | 129 | 125 | 47 | 58 | 47 | 591 | 577 | 519 | 62 | 72 | 83 | 14 | 21 | 13.7 | 0 | 24.5 | 24.5 |
| 22 | 256 | 227 | 190 | 68 | 71 | 59 | 123 | 133 | 128 | 46 | 63 | 52 | 588 | 613 | 580 | 61 | 77 | 87 | 14 | 21 | 13.9 | 0 | 28.7 | 28.7 |
| 23 | 256 | 225 | 136 | 68 | 62 | 32 | 123 | 121 | 78 | 46 | 50 | 26 | 588 | 576 | 381 | 61 | 62 | 52 | 14 | 14 | 0.8 | 0 | 7.3 | 7.3 |
| 24 | 256 | 234 | 116 | 68 | 64 | 22 | 123 | 124 | 60 | 46 | 48 | 17 | 588 | 599 | 322 | 61 | 62 | 39 | 14 | 14 | 0.2 | 0 | 3.2 | 3.2 |
| 25 | 256 | 231 | 137 | 68 | 65 | 38 | 123 | 129 | 87 | 46 | 54 | 32 | 588 | 665 | 483 | 61 | 73 | 61 | 14 | 14 | 1.7 | 0 | 11.9 | 11.9 |
| 26 | 256 | 245 | 102 | 68 | 66 | 20 | 123 | 132 | 57 | 46 | 50 | 16 | 588 | 703 | 380 | 61 | 72 | 41 | 14 | 14 | 0.3 | 0 | 3.6 | 3.6 |
| 27 | 256 | 229 | 133 | 68 | 64 | 30 | 123 | 125 | 76 | 46 | 51 | 25 | 588 | 623 | 410 | 61 | 67 | 51 | 14 | 14 | 1.5 | 0 | 9 | 9 |
| 28 | 256 | 235 | 122 | 68 | 65 | 23 | 123 | 126 | 65 | 46 | 49 | 18 | 588 | 634 | 373 | 61 | 66 | 43 | 14 | 14 | 0.3 | 0 | 4.5 | 4.5 |
| 29 | 256 | 236 | 114 | 68 | 65 | 27 | 123 | 128 | 67 | 46 | 52 | 23 | 588 | 656 | 386 | 61 | 71 | 47 | 14 | 14 | 1.5 | 0 | 9 | 9 |
| 30 | 256 | 244 | 105 | 68 | 66 | 21 | 123 | 131 | 59 | 46 | 50 | 17 | 588 | 694 | 380 | 61 | 72 | 41 | 14 | 14 | 0.4 | 0 | 4.4 | 4.4 |
| 31 | 261 | 235 | 153 | 69 | 62 | 39 | 126 | 125 | 88 | 47 | 51 | 30 | 600 | 592 | 411 | 62 | 61 | 57 | 14 | 13 | 2 | 0 | 9.4 | 9.4 |
| 32 | 256 | 232 | 97 | 68 | 61 | 23 | 123 | 121 | 54 | 46 | 47 | 18 | 588 | 580 | 258 | 61 | 58 | 35 | 14 | 13 | 1.3 | 0 | 5.7 | 5.7 |
| 33 | 256 | 228 | 96 | 68 | 63 | 11 | 123 | 108 | 33 | 46 | 45 | 6 | 588 | 417 | 201 | 61 | 48 | 20 | 14 | 14 | 0 | 0 | 0.3 | 0.3 |
| 34 | 256 | 226 | 122 | 68 | 62 | 20 | 123 | 113 | 54 | 46 | 46 | 13 | 588 | 510 | 292 | 61 | 54 | 35 | 14 | 14 | 0.1 | 0 | 1.9 | 1.9 |
| 35 | 256 | 234 | 102 | 68 | 64 | 9 | 123 | 107 | 36 | 46 | 44 | 5 | 588 | 410 | 240 | 61 | 46 | 19 | 14 | 14 | 0 | 0 | 0 | 0 |
| Algorithm | Specacf | Schmitt | FComb | MComb | Yin | YinFFT | Praat | PYin (GT) | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | |
| 00 | −28 | −3 | 0 | −0.5 | −0.3 | 0.7 | −22 | −1 | 0.3 | −1 | 0.2 | 0.7 | −1153 | −3 | −0.4 | −22 | 1 | 0.7 | 0.8 | 0.84 | 1 | 1 | 0.97 | 0.97 |
| 01 | −28 | −20 | 0.8 | −0.5 | −0.2 | 1 | −22 | −17 | 0.8 | −1 | −0.9 | 1 | −1153 | −462 | 0.7 | −22 | −10 | 0.9 | 0.8 | 0.81 | 1 | 1 | 0.99 | 0.99 |
| 02 | −28 | −20 | 0.7 | −0.5 | −0.3 | 0.9 | −22 | −17 | 0.8 | −1 | −0.9 | 0.9 | −1153 | −516 | 0.6 | −22 | −11 | 0.9 | 0.8 | 0.81 | 1 | 1 | 0.99 | 0.99 |
| 03 | −28 | −20 | 0.7 | −0.5 | −0.3 | 0.9 | −22 | −17 | 0.8 | −1 | −0.9 | 0.9 | −1153 | −526 | 0.6 | −22 | −11 | 0.9 | 0.8 | 0.81 | 1 | 1 | 0.98 | 0.98 |
| 04 | −28 | −20 | 0.7 | −0.5 | −0.3 | 0.9 | −22 | −17 | 0.8 | −1 | −0.9 | 0.9 | −1153 | −517 | 0.6 | −22 | −11 | 0.9 | 0.8 | 0.81 | 1 | 1 | 0.99 | 0.99 |
| 05 | −28 | −19 | 0.7 | −0.5 | −0.2 | 0.9 | −22 | −16 | 0.8 | −1 | −0.8 | 0.9 | −1153 | −428 | 0.6 | −22 | −10 | 0.9 | 0.8 | 0.81 | 1 | 1 | 0.99 | 0.99 |
| 06 | −28 | −20 | 0.8 | −0.5 | −0.3 | 1 | −22 | −17 | 0.9 | −1 | −0.9 | 1 | −1153 | −501 | 0.7 | −22 | −11 | 0.9 | 0.8 | 0.81 | 1 | 1 | 0.99 | 0.99 |
| 07 | −28 | −21 | 0.8 | −0.5 | −0.3 | 1 | −22 | −18 | 0.9 | −1 | −1 | 1 | −1153 | −561 | 0.8 | −22 | −12 | 0.9 | 0.8 | 0.81 | 1 | 1 | 1 | 1 |
| 08 | −28 | −20 | 0.7 | −0.5 | −0.3 | 1 | −22 | −17 | 0.8 | −1 | −0.9 | 1 | −1153 | −469 | 0.7 | −22 | −11 | 0.9 | 0.8 | 0.81 | 1 | 1 | 0.99 | 0.99 |
| 09 | −28 | −20 | 0.6 | −0.5 | −0.3 | 0.9 | −22 | −17 | 0.8 | −1 | −0.9 | 0.9 | −1153 | −490 | 0.5 | −22 | −11 | 0.8 | 0.8 | 0.81 | 1 | 1 | 0.99 | 0.99 |
| 10 | −28 | −15 | 0.4 | −0.5 | 0 | 0.6 | −22 | −10 | 0.5 | −1 | −0.4 | 0.7 | −1153 | −191 | 0.2 | −22 | −5 | 0.6 | 0.8 | 0.6 | 0.7 | 1 | 0.79 | 0.79 |
| 11 | −28 | −17 | 0.5 | −0.5 | 0 | 0.8 | −22 | −13 | 0.6 | −1 | −0.5 | 0.8 | −1153 | −239 | 0.3 | −22 | −6 | 0.7 | 0.8 | 0.8 | 1 | 1 | 0.93 | 0.93 |
| 12 | −28 | −17 | 0.5 | −0.5 | 0 | 0.8 | −22 | −13 | 0.6 | −1 | −0.5 | 0.8 | −1153 | −267 | 0.4 | −22 | −7 | 0.7 | 0.8 | 0.8 | 1 | 1 | 0.94 | 0.94 |
| 13 | −28 | −16 | 0.4 | −0.5 | 0 | 0.7 | −22 | −12 | 0.6 | −1 | −0.5 | 0.8 | −1153 | −204 | 0.3 | −22 | −6 | 0.7 | 0.8 | 0.8 | 1 | 1 | 0.9 | 0.9 |
| 14 | −28 | −16 | 0.4 | −0.5 | 0 | 0.8 | −22 | −12 | 0.6 | −1 | −0.5 | 0.8 | −1153 | −245 | 0.3 | −22 | −6 | 0.7 | 0.8 | 0.79 | 1 | 1 | 0.93 | 0.93 |
| 15 | −28 | −16 | 0.4 | −0.5 | 0 | 0.7 | −22 | −12 | 0.5 | −1 | −0.5 | 0.7 | −1153 | −238 | 0.3 | −22 | −6 | 0.6 | 0.8 | 0.77 | 0.9 | 1 | 0.85 | 0.85 |
| 16 | −28 | −17 | 0.5 | −0.5 | 0 | 0.8 | −22 | −13 | 0.6 | −1 | −0.5 | 0.8 | −1153 | −259 | 0.4 | −22 | −6 | 0.7 | 0.8 | 0.81 | 1 | 1 | 0.95 | 0.95 |
| 17 | −28 | −20 | 0.7 | −0.5 | −0.3 | 0.9 | −22 | −17 | 0.8 | −1 | −0.9 | 0.9 | −1153 | −517 | 0.6 | −22 | −11 | 0.9 | 0.8 | 0.81 | 1 | 1 | 0.99 | 0.99 |
| 18 | −28 | −15 | 0.4 | −0.5 | 0.2 | 0.7 | −22 | −10 | 0.5 | −1 | −0.3 | 0.7 | −1153 | −155 | 0.3 | −22 | −4 | 0.6 | 0.8 | 0.8 | 0.9 | 1 | 0.89 | 0.89 |
| 19 | −28 | −16 | 0.4 | −0.5 | 0 | 0.7 | −22 | −12 | 0.6 | −1 | −0.5 | 0.8 | −1153 | −204 | 0.3 | −22 | −6 | 0.7 | 0.8 | 0.8 | 1 | 1 | 0.9 | 0.9 |
| 20 | −28 | −16 | 0.4 | −0.5 | 0 | 0.7 | −22 | −12 | 0.6 | −1 | −0.5 | 0.8 | −1153 | −204 | 0.3 | −22 | −6 | 0.7 | 0.8 | 0.8 | 1 | 1 | 0.9 | 0.9 |
| 21 | −30 | −17 | 0.4 | −0.6 | 0.1 | 0.7 | −24 | −12 | 0.5 | −1 | −0.4 | 0.8 | −1208 | −194 | 0.3 | −23 | −5 | 0.7 | 0.8 | 0.8 | 1 | 1 | 0.92 | 0.92 |
| 22 | −28 | −16 | 0.4 | −0.5 | 0 | 0.7 | −22 | −12 | 0.6 | −1 | −0.5 | 0.8 | −1153 | −204 | 0.3 | −22 | −6 | 0.7 | 0.8 | 0.8 | 1 | 1 | 0.9 | 0.9 |
| 23 | −28 | −18 | 0.7 | −0.5 | −0.1 | 0.9 | −22 | −14 | 0.8 | −1 | −0.6 | 0.9 | −1153 | −288 | 0.6 | −22 | −7 | 0.8 | 0.8 | 0.81 | 1 | 1 | 0.98 | 0.98 |
| 24 | −28 | −20 | 0.7 | −0.5 | −0.3 | 0.9 | −22 | −17 | 0.8 | −1 | −0.9 | 1 | −1153 | −457 | 0.7 | −22 | −10 | 0.9 | 0.8 | 0.81 | 1 | 1 | 0.99 | 0.99 |
| 25 | −28 | −18 | 0.7 | −0.5 | 0 | 0.9 | −22 | −14 | 0.8 | −1 | −0.6 | 0.9 | −1153 | −349 | 0.7 | −22 | −8 | 0.8 | 0.8 | 0.81 | 1 | 1 | 0.98 | 0.98 |
| 26 | −28 | −21 | 0.8 | −0.5 | −0.3 | 1 | −22 | −17 | 0.9 | −1 | −0.9 | 1 | −1153 | −584 | 0.8 | −22 | −13 | 0.9 | 0.8 | 0.81 | 1 | 1 | 1 | 1 |
| 27 | −28 | −18 | 0.7 | −0.5 | −0.1 | 0.9 | −22 | −14 | 0.8 | −1 | −0.6 | 0.9 | −1153 | −353 | 0.6 | −22 | −9 | 0.9 | 0.8 | 0.81 | 1 | 1 | 0.98 | 0.98 |
| 28 | −28 | −19 | 0.7 | −0.5 | −0.2 | 0.9 | −22 | −16 | 0.8 | −1 | −0.8 | 0.9 | −1153 | −449 | 0.7 | −22 | −10 | 0.9 | 0.8 | 0.81 | 1 | 1 | 0.99 | 0.99 |
| 29 | −28 | −19 | 0.8 | −0.5 | −0.1 | 0.9 | −22 | −15 | 0.9 | −1 | −0.7 | 0.9 | −1153 | −468 | 0.8 | −22 | −11 | 0.9 | 0.8 | 0.81 | 1 | 1 | 0.99 | 0.99 |
| 30 | −28 | −21 | 0.8 | −0.5 | −0.3 | 1 | −22 | −17 | 0.9 | −1 | −0.9 | 1 | −1153 | −563 | 0.8 | −22 | −13 | 0.9 | 0.8 | 0.81 | 1 | 1 | 0.99 | 0.99 |
| 31 | −31 | −22 | 0.6 | −0.7 | −0.3 | 0.8 | −25 | −18 | 0.7 | −2 | −1 | 0.8 | −1308 | −478 | 0.5 | −25 | −11 | 0.8 | 0.8 | 0.81 | 1 | 1 | 0.96 | 0.96 |
| 32 | −28 | −20 | 0.8 | −0.5 | −0.2 | 0.9 | −22 | −17 | 0.9 | −1 | −0.8 | 0.9 | −1153 | −501 | 0.8 | −22 | −11 | 0.9 | 0.8 | 0.81 | 1 | 1 | 0.99 | 0.99 |
| 33 | −28 | −23 | 0.6 | −0.5 | −0.4 | 1 | −22 | −19 | 0.8 | −1 | −1.1 | 1 | −1153 | −266 | 0.4 | −22 | −12 | 0.8 | 0.8 | 0.81 | 1 | 1 | 1 | 1 |
| 34 | −28 | −20 | 0.6 | −0.5 | −0.3 | 0.9 | −22 | −17 | 0.7 | −1 | −0.9 | 0.9 | −1153 | −389 | 0.5 | −22 | −9 | 0.8 | 0.8 | 0.81 | 1 | 1 | 0.99 | 0.99 |
| 35 | −28 | −22 | 0.5 | −0.5 | −0.4 | 0.9 | −22 | −20 | 0.7 | −1 | −1.1 | 0.9 | −1153 | −376 | 0.4 | −22 | −11 | 0.8 | 0.8 | 0.81 | 1 | 1 | 1 | 1 |
| Algorithm | Specacf | Schmitt | FComb | MComb | Yin | YinFFT | Praat | PYin (GT) | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | |
| 00 | 394 | 161 | 370 | 111 | 96 | 73 | 258 | 79 | 240 | 96 | 66 | 62 | 2086 | 153 | 2077 | 194 | 58 | 159 | 21 | 21 | 3.1 | 0 | 4.5 | 4.5 |
| 01 | 394 | 307 | 188 | 111 | 97 | 36 | 258 | 206 | 112 | 96 | 84 | 32 | 2086 | 1342 | 1210 | 194 | 137 | 102 | 21 | 21 | 1.1 | 0 | 9.5 | 9.5 |
| 02 | 394 | 315 | 220 | 111 | 99 | 40 | 258 | 211 | 127 | 96 | 86 | 36 | 2086 | 1417 | 1405 | 194 | 143 | 117 | 21 | 21 | 1.1 | 0 | 10.2 | 10.2 |
| 03 | 394 | 315 | 201 | 111 | 96 | 48 | 258 | 210 | 131 | 96 | 84 | 43 | 2086 | 1427 | 1306 | 194 | 141 | 115 | 21 | 20 | 2.4 | 0 | 14.8 | 14.8 |
| 04 | 394 | 315 | 220 | 111 | 99 | 40 | 258 | 211 | 127 | 96 | 86 | 36 | 2086 | 1417 | 1405 | 194 | 143 | 117 | 21 | 21 | 1.1 | 0 | 10.2 | 10.2 |
| 05 | 394 | 302 | 207 | 111 | 96 | 40 | 258 | 202 | 124 | 96 | 84 | 36 | 2086 | 1291 | 1332 | 194 | 134 | 113 | 21 | 21 | 1.2 | 0 | 10.7 | 10.7 |
| 06 | 394 | 312 | 176 | 111 | 99 | 33 | 258 | 210 | 104 | 96 | 85 | 30 | 2086 | 1396 | 1130 | 194 | 142 | 95 | 21 | 21 | 1 | 0 | 8.6 | 8.6 |
| 07 | 394 | 321 | 165 | 111 | 101 | 30 | 258 | 216 | 95 | 96 | 87 | 27 | 2086 | 1475 | 1054 | 194 | 148 | 88 | 21 | 21 | 0.9 | 0 | 7.7 | 7.7 |
| 08 | 394 | 308 | 190 | 111 | 98 | 36 | 258 | 206 | 113 | 96 | 85 | 32 | 2086 | 1351 | 1221 | 194 | 138 | 103 | 21 | 21 | 1.1 | 0 | 9.5 | 9.5 |
| 09 | 394 | 311 | 228 | 111 | 101 | 47 | 258 | 211 | 141 | 96 | 87 | 42 | 2086 | 1373 | 1484 | 194 | 141 | 127 | 21 | 21 | 1.3 | 0 | 12.4 | 12.4 |
| 10 | 394 | 256 | 300 | 111 | 96 | 97 | 258 | 167 | 218 | 96 | 91 | 90 | 2086 | 818 | 1839 | 194 | 117 | 185 | 21 | 53 | 46.8 | 0 | 60.6 | 60.6 |
| 11 | 394 | 265 | 277 | 111 | 88 | 77 | 258 | 172 | 192 | 96 | 80 | 70 | 2086 | 936 | 1768 | 194 | 110 | 165 | 21 | 27 | 17.5 | 0 | 34.8 | 34.8 |
| 12 | 394 | 266 | 274 | 111 | 88 | 75 | 258 | 173 | 190 | 96 | 79 | 67 | 2086 | 990 | 1741 | 194 | 113 | 161 | 21 | 27 | 17.1 | 0 | 31.5 | 31.5 |
| 13 | 394 | 263 | 281 | 111 | 90 | 81 | 258 | 172 | 198 | 96 | 82 | 74 | 2086 | 851 | 1816 | 194 | 109 | 171 | 21 | 27 | 17.9 | 0 | 40.6 | 40.6 |
| 14 | 394 | 260 | 280 | 111 | 87 | 79 | 258 | 167 | 196 | 96 | 79 | 70 | 2086 | 940 | 1770 | 194 | 110 | 165 | 21 | 28 | 18.6 | 0 | 34.3 | 34.3 |
| 15 | 394 | 266 | 285 | 111 | 95 | 87 | 258 | 176 | 202 | 96 | 88 | 81 | 2086 | 906 | 1800 | 194 | 119 | 175 | 21 | 33 | 23.8 | 0 | 49.1 | 49.1 |
| 16 | 394 | 266 | 263 | 111 | 87 | 67 | 258 | 172 | 176 | 96 | 77 | 60 | 2086 | 964 | 1685 | 194 | 110 | 152 | 21 | 24 | 13.4 | 0 | 28 | 28 |
| 17 | 394 | 315 | 220 | 111 | 99 | 40 | 258 | 211 | 127 | 96 | 86 | 36 | 2086 | 1417 | 1405 | 194 | 143 | 117 | 21 | 21 | 1.1 | 0 | 10.2 | 10.2 |
| 18 | 394 | 243 | 288 | 111 | 86 | 86 | 258 | 155 | 205 | 96 | 80 | 79 | 2086 | 772 | 1836 | 194 | 102 | 175 | 21 | 29 | 20.5 | 0 | 44.2 | 44.2 |
| 19 | 394 | 263 | 281 | 111 | 90 | 81 | 258 | 172 | 198 | 96 | 82 | 74 | 2086 | 851 | 1816 | 194 | 109 | 171 | 21 | 27 | 17.9 | 0 | 40.6 | 40.6 |
| 20 | 394 | 263 | 281 | 111 | 90 | 81 | 258 | 172 | 198 | 96 | 82 | 74 | 2086 | 851 | 1816 | 194 | 109 | 171 | 21 | 27 | 17.9 | 0 | 40.6 | 40.6 |
| 21 | 403 | 259 | 283 | 110 | 84 | 78 | 265 | 164 | 200 | 96 | 78 | 72 | 2038 | 823 | 1739 | 199 | 105 | 172 | 21 | 27 | 17.8 | 0 | 36.7 | 36.7 |
| 22 | 394 | 263 | 281 | 111 | 90 | 81 | 258 | 172 | 198 | 96 | 82 | 74 | 2086 | 851 | 1816 | 194 | 109 | 171 | 21 | 27 | 17.9 | 0 | 40.6 | 40.6 |
| 23 | 394 | 279 | 216 | 111 | 89 | 49 | 258 | 183 | 138 | 96 | 78 | 44 | 2086 | 1071 | 1404 | 194 | 117 | 123 | 21 | 21 | 1.9 | 0 | 14.6 | 14.6 |
| 24 | 394 | 306 | 192 | 111 | 98 | 38 | 258 | 206 | 116 | 96 | 85 | 34 | 2086 | 1331 | 1235 | 194 | 137 | 105 | 21 | 21 | 1.2 | 0 | 9.9 | 9.9 |
| 25 | 394 | 284 | 203 | 111 | 88 | 53 | 258 | 183 | 137 | 96 | 78 | 48 | 2086 | 1199 | 1278 | 194 | 126 | 116 | 21 | 21 | 2.9 | 0 | 18.5 | 18.5 |
| 26 | 394 | 322 | 153 | 111 | 100 | 31 | 258 | 215 | 94 | 96 | 87 | 27 | 2086 | 1511 | 954 | 194 | 150 | 81 | 21 | 21 | 1 | 0 | 8 | 8 |
| 27 | 394 | 287 | 207 | 111 | 92 | 45 | 258 | 190 | 129 | 96 | 81 | 41 | 2086 | 1197 | 1334 | 194 | 127 | 116 | 21 | 21 | 2.7 | 0 | 15.5 | 15.5 |
| 28 | 394 | 304 | 197 | 111 | 97 | 39 | 258 | 204 | 119 | 96 | 84 | 35 | 2086 | 1332 | 1268 | 194 | 137 | 107 | 21 | 21 | 1.2 | 0 | 10.5 | 10.5 |
| 29 | 394 | 303 | 169 | 111 | 93 | 39 | 258 | 198 | 108 | 96 | 82 | 36 | 2086 | 1376 | 1052 | 194 | 140 | 93 | 21 | 21 | 2.5 | 0 | 14.3 | 14.3 |
| 30 | 394 | 319 | 158 | 111 | 99 | 32 | 258 | 212 | 96 | 96 | 86 | 28 | 2086 | 1495 | 978 | 194 | 149 | 84 | 21 | 21 | 1.1 | 0 | 8.7 | 8.7 |
| 31 | 397 | 303 | 247 | 112 | 93 | 65 | 261 | 200 | 168 | 97 | 82 | 59 | 2109 | 1294 | 1613 | 196 | 130 | 147 | 21 | 19 | 3.9 | 0 | 22 | 22 |
| 32 | 394 | 311 | 162 | 111 | 93 | 40 | 258 | 205 | 106 | 96 | 81 | 36 | 2086 | 1400 | 1044 | 194 | 138 | 93 | 21 | 20 | 2.5 | 0 | 13.4 | 13.4 |
| 33 | 394 | 319 | 250 | 111 | 103 | 33 | 258 | 219 | 127 | 96 | 90 | 26 | 2086 | 790 | 1591 | 194 | 124 | 123 | 21 | 21 | 0.6 | 0 | 1.5 | 1.5 |
| 34 | 394 | 305 | 249 | 111 | 97 | 46 | 258 | 206 | 144 | 96 | 86 | 39 | 2086 | 1143 | 1566 | 194 | 132 | 131 | 21 | 21 | 0.9 | 0 | 9.1 | 9.1 |
| 35 | 394 | 317 | 277 | 111 | 105 | 43 | 258 | 220 | 142 | 96 | 90 | 28 | 2086 | 729 | 1779 | 194 | 117 | 123 | 21 | 21 | 0.6 | 0 | 0 | 0 |
| Algorithm | Specacf | Schmitt | FComb | MComb | Yin | YinFFT | Praat | PYin (GT) | ||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | |
| 00 | 40 | 48 | 61 | 67 | 69 | 89 | 77 | 82 | 84 | 84 | 87 | 92 | 45 | 52 | 63 | 88 | 90 | 97 | 95 | 95.1 | 99.8 | 100 | 99.8 | 99.8 |
| 01 | 40 | 33 | 60 | 67 | 64 | 86 | 77 | 63 | 72 | 84 | 77 | 86 | 45 | 36 | 77 | 88 | 81 | 85 | 95 | 95.1 | 100 | 100 | 95.7 | 95.7 |
| 02 | 40 | 35 | 61 | 67 | 66 | 90 | 77 | 66 | 77 | 84 | 79 | 91 | 45 | 39 | 83 | 88 | 84 | 91 | 95 | 95.1 | 100 | 100 | 98.3 | 98.3 |
| 03 | 40 | 36 | 64 | 67 | 67 | 87 | 77 | 67 | 78 | 84 | 80 | 91 | 45 | 40 | 83 | 88 | 84 | 91 | 95 | 95.1 | 100 | 100 | 98.3 | 98.3 |
| 04 | 40 | 35 | 61 | 67 | 66 | 90 | 77 | 66 | 77 | 84 | 79 | 91 | 45 | 39 | 83 | 88 | 84 | 91 | 95 | 95.1 | 100 | 100 | 98.3 | 98.3 |
| 05 | 40 | 34 | 61 | 67 | 65 | 88 | 77 | 64 | 74 | 84 | 78 | 88 | 45 | 37 | 79 | 88 | 82 | 88 | 95 | 95.1 | 100 | 100 | 97.4 | 97.4 |
| 06 | 40 | 35 | 65 | 67 | 65 | 89 | 77 | 65 | 76 | 84 | 79 | 89 | 45 | 38 | 81 | 88 | 82 | 88 | 95 | 95.1 | 100 | 100 | 97.4 | 97.4 |
| 07 | 40 | 36 | 69 | 67 | 66 | 92 | 77 | 66 | 80 | 84 | 79 | 92 | 45 | 39 | 85 | 88 | 84 | 91 | 95 | 95.1 | 100 | 100 | 98.3 | 98.3 |
| 08 | 40 | 34 | 63 | 67 | 65 | 89 | 77 | 65 | 75 | 84 | 78 | 89 | 45 | 38 | 80 | 88 | 82 | 88 | 95 | 95.1 | 100 | 100 | 97.4 | 97.4 |
| 09 | 40 | 20 | 41 | 67 | 52 | 70 | 77 | 47 | 54 | 84 | 65 | 73 | 45 | 15 | 43 | 88 | 64 | 68 | 95 | 95.1 | 100 | 100 | 84.6 | 84.6 |
| 10 | 40 | 21 | 32 | 67 | 46 | 51 | 77 | 41 | 42 | 84 | 54 | 58 | 45 | 13 | 33 | 88 | 55 | 57 | 95 | 83.3 | 86.9 | 100 | 72 | 72 |
| 11 | 40 | 21 | 36 | 67 | 49 | 58 | 77 | 44 | 46 | 84 | 60 | 65 | 45 | 17 | 44 | 88 | 61 | 63 | 95 | 95.2 | 99.6 | 100 | 80.1 | 80.1 |
| 12 | 40 | 21 | 36 | 67 | 49 | 59 | 77 | 44 | 47 | 84 | 61 | 66 | 45 | 17 | 42 | 88 | 62 | 64 | 95 | 95.2 | 99.6 | 100 | 81.3 | 81.3 |
| 13 | 40 | 21 | 35 | 67 | 47 | 56 | 77 | 42 | 44 | 84 | 57 | 62 | 45 | 16 | 41 | 88 | 58 | 60 | 95 | 95.2 | 99.6 | 100 | 76.8 | 76.8 |
| 14 | 40 | 20 | 35 | 67 | 48 | 58 | 77 | 43 | 45 | 84 | 60 | 65 | 45 | 13 | 35 | 88 | 60 | 62 | 95 | 95.2 | 99.5 | 100 | 80.6 | 80.6 |
| 15 | 40 | 27 | 42 | 67 | 55 | 64 | 77 | 51 | 54 | 84 | 65 | 70 | 45 | 26 | 56 | 88 | 68 | 70 | 95 | 94.5 | 98.8 | 100 | 83.2 | 83.2 |
| 16 | 40 | 27 | 44 | 67 | 56 | 68 | 77 | 52 | 55 | 84 | 67 | 73 | 45 | 26 | 58 | 88 | 70 | 72 | 95 | 95.2 | 99.7 | 100 | 86 | 86 |
| 17 | 40 | 35 | 61 | 67 | 66 | 90 | 77 | 66 | 77 | 84 | 79 | 91 | 45 | 39 | 83 | 88 | 84 | 91 | 95 | 95.1 | 100 | 100 | 98.3 | 98.3 |
| 18 | 40 | 22 | 34 | 67 | 47 | 54 | 77 | 43 | 44 | 84 | 56 | 61 | 45 | 17 | 41 | 88 | 58 | 60 | 95 | 95.3 | 99.4 | 100 | 75.6 | 75.6 |
| 19 | 40 | 21 | 35 | 67 | 47 | 56 | 77 | 42 | 44 | 84 | 57 | 62 | 45 | 16 | 41 | 88 | 58 | 60 | 95 | 95.2 | 99.6 | 100 | 76.8 | 76.8 |
| 20 | 40 | 21 | 35 | 67 | 47 | 56 | 77 | 42 | 44 | 84 | 57 | 62 | 45 | 16 | 41 | 88 | 58 | 60 | 95 | 95.2 | 99.6 | 100 | 76.8 | 76.8 |
| 21 | 38 | 21 | 36 | 66 | 50 | 58 | 76 | 45 | 47 | 83 | 60 | 65 | 43 | 18 | 47 | 88 | 62 | 64 | 95 | 95.3 | 99.6 | 100 | 79.8 | 79.8 |
| 22 | 40 | 21 | 35 | 67 | 47 | 56 | 77 | 42 | 44 | 84 | 57 | 62 | 45 | 16 | 41 | 88 | 58 | 60 | 95 | 95.2 | 99.6 | 100 | 76.8 | 76.8 |
| 23 | 40 | 22 | 45 | 67 | 52 | 70 | 77 | 50 | 56 | 84 | 64 | 72 | 45 | 22 | 59 | 88 | 67 | 71 | 95 | 95.1 | 100 | 100 | 85.1 | 85.1 |
| 24 | 40 | 23 | 49 | 67 | 53 | 74 | 77 | 53 | 61 | 84 | 67 | 75 | 45 | 25 | 64 | 88 | 70 | 74 | 95 | 95.1 | 100 | 100 | 86.7 | 86.7 |
| 25 | 40 | 21 | 43 | 67 | 51 | 67 | 77 | 47 | 53 | 84 | 63 | 70 | 45 | 16 | 43 | 88 | 63 | 66 | 95 | 95.1 | 99.9 | 100 | 83.3 | 83.3 |
| 26 | 40 | 21 | 51 | 67 | 53 | 76 | 77 | 51 | 61 | 84 | 66 | 76 | 45 | 19 | 54 | 88 | 66 | 70 | 95 | 95.1 | 100 | 100 | 84.8 | 84.8 |
| 27 | 40 | 22 | 45 | 67 | 52 | 71 | 77 | 50 | 57 | 84 | 65 | 74 | 45 | 21 | 56 | 88 | 67 | 71 | 95 | 95.1 | 99.9 | 100 | 84.7 | 84.7 |
| 28 | 40 | 22 | 47 | 67 | 53 | 73 | 77 | 51 | 59 | 84 | 66 | 74 | 45 | 22 | 59 | 88 | 68 | 72 | 95 | 95.1 | 100 | 100 | 84.6 | 84.6 |
| 29 | 40 | 21 | 49 | 67 | 52 | 74 | 77 | 50 | 59 | 84 | 66 | 74 | 45 | 19 | 52 | 88 | 66 | 70 | 95 | 95.1 | 99.9 | 100 | 84.8 | 84.8 |
| 30 | 40 | 21 | 50 | 67 | 53 | 75 | 77 | 50 | 60 | 84 | 66 | 76 | 45 | 19 | 53 | 88 | 66 | 71 | 95 | 95.1 | 100 | 100 | 84.9 | 84.9 |
| 31 | 39 | 34 | 57 | 66 | 66 | 80 | 76 | 64 | 72 | 83 | 78 | 87 | 44 | 37 | 76 | 88 | 82 | 87 | 95 | 95.2 | 99.9 | 100 | 97.2 | 97.2 |
| 32 | 40 | 30 | 60 | 67 | 60 | 80 | 77 | 61 | 70 | 84 | 74 | 82 | 45 | 32 | 72 | 88 | 77 | 82 | 95 | 95.1 | 100 | 100 | 92.8 | 92.8 |
| 33 | 40 | 42 | 80 | 67 | 69 | 95 | 77 | 79 | 94 | 84 | 84 | 98 | 45 | 45 | 95 | 88 | 89 | 99 | 95 | 95.1 | 100 | 100 | 100 | 100 |
| 34 | 40 | 34 | 61 | 67 | 63 | 81 | 77 | 68 | 76 | 84 | 77 | 85 | 45 | 36 | 78 | 88 | 81 | 85 | 95 | 95.1 | 100 | 100 | 94.7 | 94.7 |
| 35 | 40 | 42 | 82 | 67 | 69 | 96 | 77 | 80 | 94 | 84 | 84 | 98 | 45 | 45 | 95 | 88 | 89 | 99 | 95 | 95.1 | 100 | 100 | 100 | 100 |
| Algorithm | MAE | R2 | RMSE | FFE | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | GT-ES | GT-SM | ES-SM | |
| 00 | 165 | 59 | 136 | −175 | −1 | 0.4 | 451 | 91 | 426 | 71 | 75 | 84 |
| 01 | 165 | 160 | 76 | −175 | −73 | 0.9 | 451 | 313 | 240 | 71 | 64 | 81 |
| 02 | 165 | 161 | 82 | −175 | −81 | 0.8 | 451 | 327 | 278 | 71 | 66 | 85 |
| 03 | 165 | 160 | 81 | −175 | −82 | 0.8 | 451 | 327 | 264 | 71 | 67 | 85 |
| 04 | 165 | 161 | 82 | −175 | −81 | 0.8 | 451 | 327 | 278 | 71 | 66 | 85 |
| 05 | 165 | 160 | 85 | −175 | −68 | 0.8 | 451 | 304 | 265 | 71 | 65 | 82 |
| 06 | 165 | 161 | 69 | −175 | −79 | 0.9 | 451 | 324 | 224 | 71 | 66 | 84 |
| 07 | 165 | 161 | 62 | −175 | −87 | 0.9 | 451 | 338 | 209 | 71 | 66 | 87 |
| 08 | 165 | 160 | 76 | −175 | −74 | 0.9 | 451 | 315 | 242 | 71 | 65 | 83 |
| 09 | 165 | 191 | 127 | −175 | −77 | 0.8 | 451 | 321 | 296 | 71 | 51 | 64 |
| 10 | 165 | 181 | 179 | −175 | −32 | 0.5 | 451 | 228 | 397 | 71 | 45 | 51 |
| 11 | 165 | 172 | 153 | −175 | −39 | 0.7 | 451 | 240 | 367 | 71 | 50 | 59 |
| 12 | 165 | 175 | 153 | −175 | −43 | 0.7 | 451 | 248 | 361 | 71 | 50 | 59 |
| 13 | 165 | 172 | 158 | −175 | −34 | 0.6 | 451 | 228 | 377 | 71 | 48 | 57 |
| 14 | 165 | 178 | 162 | −175 | −40 | 0.6 | 451 | 239 | 368 | 71 | 49 | 57 |
| 15 | 165 | 168 | 152 | −175 | −39 | 0.6 | 451 | 241 | 379 | 71 | 55 | 65 |
| 16 | 165 | 161 | 130 | −175 | −42 | 0.7 | 451 | 243 | 345 | 71 | 56 | 67 |
| 17 | 165 | 161 | 82 | −175 | −81 | 0.8 | 451 | 327 | 278 | 71 | 66 | 85 |
| 18 | 165 | 163 | 160 | −175 | −26 | 0.6 | 451 | 210 | 384 | 71 | 48 | 56 |
| 19 | 165 | 172 | 158 | −175 | −34 | 0.6 | 451 | 228 | 377 | 71 | 48 | 57 |
| 20 | 165 | 172 | 158 | −175 | −34 | 0.6 | 451 | 228 | 377 | 71 | 48 | 57 |
| 21 | 168 | 164 | 147 | −184 | −32 | 0.6 | 448 | 220 | 366 | 70 | 50 | 60 |
| 22 | 165 | 172 | 158 | −175 | −34 | 0.6 | 451 | 228 | 377 | 71 | 48 | 57 |
| 23 | 165 | 159 | 101 | −175 | −47 | 0.8 | 451 | 262 | 282 | 71 | 53 | 67 |
| 24 | 165 | 164 | 82 | −175 | −72 | 0.9 | 451 | 312 | 246 | 71 | 55 | 71 |
| 25 | 165 | 176 | 120 | −175 | −55 | 0.8 | 451 | 283 | 262 | 71 | 51 | 63 |
| 26 | 165 | 183 | 88 | −175 | −91 | 0.9 | 451 | 344 | 192 | 71 | 53 | 70 |
| 27 | 165 | 168 | 104 | −175 | −56 | 0.8 | 451 | 285 | 268 | 71 | 53 | 68 |
| 28 | 165 | 170 | 92 | −175 | −71 | 0.9 | 451 | 311 | 252 | 71 | 54 | 69 |
| 29 | 165 | 175 | 95 | −175 | −73 | 0.9 | 451 | 316 | 214 | 71 | 53 | 68 |
| 30 | 165 | 182 | 89 | −175 | −88 | 0.9 | 451 | 340 | 197 | 71 | 53 | 69 |
| 31 | 168 | 163 | 111 | −199 | −76 | 0.7 | 456 | 303 | 329 | 70 | 65 | 80 |
| 32 | 165 | 159 | 70 | −175 | −78 | 0.9 | 451 | 321 | 212 | 71 | 61 | 78 |
| 33 | 165 | 132 | 52 | −175 | −46 | 0.8 | 451 | 238 | 307 | 71 | 72 | 94 |
| 34 | 165 | 146 | 76 | −175 | −62 | 0.8 | 451 | 284 | 311 | 71 | 65 | 81 |
| 35 | 165 | 131 | 59 | −175 | −61 | 0.7 | 451 | 228 | 342 | 71 | 72 | 95 |
References
- Ferro, M.; Tamburini, F. Using Deep Neural Networks for Smoothing Pitch Profiles in Connected Speech. Ital. J. Comput. Linguist. 2019, 5, 33–48. [Google Scholar] [CrossRef]
- Zhao, X.; O’Shaughnessy, D.; Nguyen, M.Q. A Processing Method for Pitch Smoothing Based on Autocorrelation and Cepstral F0 Detection Approaches. In Proceedings of the 2007 International Symposium on Signals, Systems and Electronics, Montreal, QC, Canada, 30 July–2 August 2007; pp. 59–62. [Google Scholar] [CrossRef]
- So, Y.; Jia, J.; Cai, L. Analysis and Improvement of Auto-Correlation Pitch Extraction Algorithm Based on Candidate Set; Lecture Notes in Electrical Engineering; Springer: Berlin/Heidelberg, Germany, 2012; Volume 128, pp. 697–702. ISBN 9783642257919. [Google Scholar]
- Faghih, B.; Timoney, J. An Investigation into Several Pitch Detection Algorithms for Singing Phrases Analysis. In Proceedings of the 2019 30th Irish Signals and Systems Conference (ISSC), Maynooth, Ireland, 17–18 June 2019; pp. 1–5. [Google Scholar]
- Faghih, B.; Timoney, J. Real-Time Monophonic Singing Pitch Detection. 2022; preprint. [Google Scholar] [CrossRef]
- Luers, J.K.; Wenning, R.H. Polynomial Smoothing: Linear vs Cubic. Technometrics 1971, 13, 589. [Google Scholar] [CrossRef]
- Craven, P.; Wahba, G. Smoothing Noisy Data with Spline Functions. Numer. Math. 1978, 31, 377–403. [Google Scholar] [CrossRef]
- Hutchinson, M.F.; de Hoog, F.R. Smoothing Noisy Data with Spline Functions. Numer. Math. 1985, 47, 99–106. [Google Scholar] [CrossRef]
- Deng, G.; Cahill, L.W. An Adaptive Gaussian Filter for Noise Reduction and Edge Detection. In Proceedings of the 1993 IEEE Conference Record Nuclear Science Symposium and Medical Imaging Conference, San Francisco, CA, USA, 31 October–6 November 1993; pp. 1615–1619. [Google Scholar]
- Cleveland, W.S. Robust Locally Weighted Regression and Smoothing Scatterplots. J. Am. Stat. Assoc. 1979, 74, 829–836. [Google Scholar] [CrossRef]
- Cleveland, W.S. LOWESS: A Program for Smoothing Scatterplots by Robust Locally Weighted Regression. Am. Stat. 1981, 35, 54. [Google Scholar] [CrossRef]
- Wen, Q.; Zhang, Z.; Li, Y.; Sun, L. Fast RobustSTL: Efficient and Robust Seasonal-Trend Decomposition for Time Series with Complex Patterns. In Proceedings of the 26th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Virtual Event, CA, USA, 6–10 July 2020; pp. 2203–2213. [Google Scholar]
- Sampaio, M.D.S. Contour Similarity Algorithms. MusMat-Braz. J. Music Math. 2018, 2, 58–78. [Google Scholar]
- Wu, Y.D. A New Similarity Measurement of Pitch Contour for Analyzing 20th- and 21st-Century Music: The Minimally Divergent Contour Network. Indiana Theory Rev. 2013, 31, 5–51. [Google Scholar]
- Lin, H.; Wu, H.-H.; Kao, Y.-T. Geometric Measures of Distance between Two Pitch Contour Sequences. J. Comput. 2008, 19, 55–66. [Google Scholar]
- Chatterjee, I.; Gupta, P.; Bera, P.; Sen, J. Pitch Tracking and Pitch Smoothing Methods-Based Statistical Approach to Explore Singers’ Melody of Voice on a Set of Songs of Tagore; Springer: Singapore, 2018; Volume 462, ISBN 9789811079009. [Google Scholar]
- Smith, S.W. Moving Average Filters. In The Scientist & Engineer’s Guide to Digital Signal Processing; California Technical Publishing: San Clemente, CA, USA, 1999; pp. 277–284. ISBN 0-9660176-7-6. [Google Scholar]
- Kasi, K.; Zahorian, S.A. Yet Another Algorithm for Pitch Tracking. In Proceedings of the IEEE International Conference on Acoustics Speech and Signal Processing, Orlando, FL, USA, 13–17 May 2002; Volume 1, pp. I-361–I-364. [Google Scholar]
- Okada, M.; Ishikawa, T.; Ikegaya, Y. A Computationally Efficient Filter for Reducing Shot Noise in Low S/N Data. PLoS ONE 2016, 11, e0157595. [Google Scholar] [CrossRef]
- Jlassi, W.; Bouzid, A.; Ellouze, N. A New Method for Pitch Smoothing. In Proceedings of the 2016 2nd International Conference on Advanced Technologies for Signal and Image Processing (ATSIP), Monastir, Tunisia, 21–23 March 2016; pp. 657–661. [Google Scholar]
- Liu, Q.; Wang, J.; Wang, M.; Jiang, P.; Yang, X.; Xu, J. A Pitch Smoothing Method for Mandarin Tone Recognition. Int. J. Signal Process. Image Process. Pattern Recognit. 2013, 6, 245–254. [Google Scholar]
- Plante, F.; Meyer, G.; Ainsworth, W.A. A Pitch Extraction Reference Database. In Proceedings of the Fourth European Conference on Speech Communication and Technology, Madrid, Spain, 18–21 September 1995; EUROSPEECH: Madrid, Spain, 1995. [Google Scholar]
- Gawlik, M.; Wiesław, W. Modern Pitch Detection Methods in Singing Voices Analyzes. In Proceedings of the Euronoise 2018, Crete, Greece, 27–31 May 2018; pp. 247–254. [Google Scholar]
- Mauch, M.; Dixon, S. PYIN: A Fundamental Frequency Estimator Using Probabilistic Threshold Distributions. In Proceedings of the 2014 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Florence, Italy, 4–9 May 2014; pp. 659–663. [Google Scholar] [CrossRef]
- De Cheveigné, A.; Kawahara, H. YIN, a Fundamental Frequency Estimator for Speech and Music. J. Acoust. Soc. Am. 2002, 111, 1917–1930. [Google Scholar] [CrossRef] [PubMed]
- Aubio. Available online: https://aubio.org/ (accessed on 1 February 2022).
- Brossier, P.M. Automatic Annotation of Musical Audio for Interactive Applications. Ph.D. Thesis, Queen Mary University of London, London, UK, 2006. [Google Scholar]
- Boersma, P.; van Heuven, V. PRAAT, a System for Doing Phonetics by Computer. Glot. Int. 2001, 5, 341–347. [Google Scholar]
- Boersma, P. Accurate Short-Term Analysis of the Fundamental Frequency and the Harmonics-To-Noise Ratio of a Sampled Sound. In Proceedings of the Institute of Phonetic Sciences; University of Amsterdam: Amsterdam, The Netherlands, 1993; Volume 17, pp. 97–110. [Google Scholar]
- Buitinck, L.; Louppe, G.; Blondel, M.; Pedregosa, F.; Mueller, A.; Grisel, O.; Niculae, V.; Prettenhofer, P.; Gramfort, A.; Grobler, J.; et al. API Design for Machine Learning Software: Experiences from the Scikit-Learn Project. arXiv 2013, arXiv:1309.0238. [Google Scholar]
- Colin Cameron, A.; Windmeijer, F.A.G. An R-Squared Measure of Goodness of Fit for Some Common Nonlinear Regression Models. J. Econom. 1997, 77, 329–342. [Google Scholar] [CrossRef]
- Drugman, T.; Alwan, A. Joint Robust Voicing Detection and Pitch Estimation Based on Residual Harmonics. In Proceedings of the Annual Conference of the International Speech Communication Association, Florence, Italy, 27–31 August 2011. [Google Scholar] [CrossRef]
- Savitzky, A.; Golay, M.J.E. Smoothing and Differentiation of Data by Simplified Least Squares Procedures. Anal. Chem. 1964, 36, 1627–1639. [Google Scholar] [CrossRef]
- Dai, W.; Selesnick, I.; Rizzo, J.-R.; Rucker, J.; Hudson, T. A Nonlinear Generalization of the Savitzky-Golay Filter and the Quantitative Analysis of Saccades. J. Vis. 2017, 17, 10. [Google Scholar] [CrossRef]
- Schmid, M.; Rath, D.; Diebold, U. Why and How Savitzky–Golay Filters Should Be Replaced. ACS Meas. Sci. Au 2022, 2, 185–196. [Google Scholar] [CrossRef]
- Rej, R. NIST/SEMATECH e-Handbook of Statistical Methods; American Association for Clinical Chemistry: Washington, DC, USA, 2003. [Google Scholar]
- Braun, S. WINDOWS. In Encyclopedia of Vibration; Elsevier: Amsterdam, The Netherlands, 2001; Volume 2, pp. 1587–1595. [Google Scholar]
- Podder, P.; Zaman Khan, T.; Haque Khan, M.; Muktadir Rahman, M. Comparative Performance Analysis of Hamming, Hanning and Blackman Window. Int. J. Comput. Appl. 2014, 96, 1–7. [Google Scholar] [CrossRef]
- Orfanidis, S.J. Local Polynomial Filters. In Applied Optimum Signal Processing; McGraw-Hill Publishing Company: New York, NY, USA, 2018; pp. 119–163. [Google Scholar]
- Jones, W.M.P. Kernel Smoothing; Chapman & Hall: London, UK, 1995. [Google Scholar]
- Dagum, E.B. Time Series Modeling and Decomposition. Statistica 2010, 70, 433–457. [Google Scholar] [CrossRef]
- Welch, G.F. Kalman Filter. In Computer Vision; Springer International Publishing: Cham, Switzerland, 2021; pp. 1–3. ISBN 9789533070940. [Google Scholar]
- Kroher, N.; Gomez, E. Automatic Transcription of Flamenco Singing From Polyphonic Music Recordings. IEEE/ACM Trans. Audio Speech Lang. Process. 2016, 24, 901–913. [Google Scholar] [CrossRef][Green Version]
- Lewis-Beck, M.S.; Skalaban, A. The R-Squared: Some Straight Talk. Polit. Anal. 1990, 2, 153–171. [Google Scholar] [CrossRef]
- McFee, B.; Metsai, A.; McVicar, M.; Balke, S.; Thomé, C.; Raffel, C.; Zalkow, F.; Malek, A.; Dana; Lee, K.; et al. Librosa/Librosa: 0.9.1 2022. Available online: https://librosa.org/doc/latest/index.html (accessed on 5 February 2022).
- Virtanen, P.; Gommers, R.; Oliphant, T.E.; Haberland, M.; Reddy, T.; Cournapeau, D.; Burovski, E.; Peterson, P.; Weckesser, W.; Bright, J.; et al. SciPy 1.0: Fundamental Algorithms for Scientific Computing in Python. Nat. Methods 2020, 17, 261–272. [Google Scholar] [CrossRef] [PubMed]
- Reback, J.; McKinney, W.; Jbrockmendel; den Bossche, J.V.; Augspurger, T.; Cloud, P.; Gfyoung; Sinhrks; Klein, A.; Roeschke, M.; et al. Pandas-Dev/Pandas: Pandas 1.0.3; Zenodo: Genève, Switzerland, 2020. [Google Scholar] [CrossRef]
- Barupal, D.K.; Fiehn, O. Scikit-Learn: Machine Learning in Python. J. Mach. Learn. Res. 2011, 2, 2825–2830. [Google Scholar]




| Code | Algorithm |
|---|---|
| 00 | Smart-Median |
| 01 | Gaussian (sigma = 1) |
| 02 | Savitzky–Golay filter |
| 03 | Exponential |
| 04 | Window-based (window_type = ‘rectangular’) |
| 05 | Window-based (window_type = ‘hanning’) |
| 06 | Window-based (window_type = ‘hamming’) |
| 07 | Window-based (window_type = ‘bartlett’) |
| 08 | Window-based (window_type = ‘blackman’) |
| 09 | Direct Spectral |
| 10 | Polynomial |
| 11 | Spline (type = ‘linear_spline’) |
| 12 | Spline (type = ‘cubic_spline’) |
| 13 | Spline (type = ‘natural_cubic_spline’) |
| 14 | Gaussian (sigma = 0.2, n_knots = 10) |
| 15 | Binner |
| 16 | LOWESS |
| 17 | Decompose (type = ‘Window-based’, method = ‘additive’) |
| 18 | Decompose (type = ‘lowess’, method = ‘additive’) |
| 19 | Decompose (type = ‘natural_cubic_spline’, method = ‘additive’) |
| 20 | Decompose (type = ‘natural_cubic_spline’, method = ‘multiplicative’) |
| 21 | Decompose (type = ‘lowess’, method = ‘multiplicative’) |
| 22 | Decompose (type = ‘natural_cubic_spline’, method = ‘multiplicative’) |
| 23 | Kalman (component = ‘level’) |
| 24 | Kalman (component = ‘level_trend’) |
| 25 | Kalman (component = ‘level_season’) |
| 26 | Kalman (component = ‘level_trend_season’) |
| 27 | Kalman (component = ‘level_longseason’) |
| 28 | Kalman (component = ‘level_trend_longseason’) |
| 29 | Kalman (component = ‘level_season_longseason’) |
| 30 | Kalman (component = ‘level_trend_season_longseason’) |
| 31 | Moving Average (simple = True) |
| 32 | Moving Average (simple = False) |
| 33 | Median Filter |
| 34 | Okada Filter |
| 35 | Jlassi Filter |
| Best Code (Value) | Normal | Worst Code (Value) | ||
|---|---|---|---|---|
| MAE | 00 (58.71) 33 (131.85) 35 (131.3) | Avg = 162.56 | Std = 21.25 | 09 (190.95) |
| Min = 141.31 | Max = 183.81 | |||
| All the other algorithms | ||||
| R2 | 00 (−0.72) 10 (−31.59) 13 (−34.07) 18 (−26.9) 19 (−34.7) 20 (−34.07) 21 (−32.46) 22 (−34.07) | Avg = −58.01 | Std = 21.98 | 02 (−80.79) 03 (−82.22) 04 (−80.81) 07 (−87.46) 17 (−80.81) 26 (−90.75) 30 (−87.66) |
| Min = −79.99 | Max = −36.03 | |||
| All the other algorithms | ||||
| RMSE | 00 (90.67) 18 (209.56) 21 (220.12) | Avg = 275.62 | Std = 53.1 | 07 (338.41) 26 (343.63) 30 (339.93) |
| Min = 222.52 | Max = 328.72 | |||
| All the other algorithms | ||||
| FFE | 00 (74.73) 02 (66.21) 03 (66.87) 04 (66.22) 07 (66.48) 17 (66.22) 33 (71.87) 35 (71.99) | Avg = 57.59 | Std = 8.35 | 10 (44.83) 13 (48.24) 14 (48.6) 18 (48.47) 19 (48.24) 20 (48.24) 22 (48.24) |
| Min = 49.24 | Max = 65.94 | |||
| All the other algorithms | ||||
| 1st | 2nd | 3rd | 4th | 5th | R2 Score | RMSE | MAE | FFE | |
|---|---|---|---|---|---|---|---|---|---|
| Ground Truth | 98 (G2) | 98 (G2) | 110 (A2) | 98 (G2) | 98 (G2) | NA | NA | NA | NA |
| Predict 1 | 98.2 (G2) | 98.2 (G2) | 123.2 (B2) | 98.2 (G2) | 98.2 (G2) | −0.61 | 5.91 | 2.8 | 0.8 |
| Predict 2 | 98 (G2) | 98 (G2) | 123 (B2) | 98 (G2) | 98 (G2) | −0.56 | 5.81 | 2.6 | 0.8 |
| Predict 3 | 98 (G2) | 110 (A2) | 110 (A2) | 110 (A2) | 98 (G2) | −0.33 | 7.59 | 4.8 | 0.6 |
| Predict 4 | 98.2 (G2) | 98.2 (G2) | 110.2 (A2) | 98.2 (G2) | 98.2 (G2) | 0.999 | 0.2 | 0.2 | 1 |
| Input | 100 | 102 | 2000 | 2000 | 100 |
| Moving average(window size = 3) | 734 | 1367.333 | 1366.667 | 1050 | 100 |
| Median (window size = 3) | 102 | 2000 | 2000 | 1050 | 100 |
| Okada | 100 | 102 | 2000 | 2000 | 100 |
| Jlassi | 100 | 102 | 2000 | 2000 | 100 |
| Smart-Median | 100 | 102 | 102 | 102 | 100 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Faghih, B.; Timoney, J. Smart-Median: A New Real-Time Algorithm for Smoothing Singing Pitch Contours. Appl. Sci. 2022, 12, 7026. https://doi.org/10.3390/app12147026
Faghih B, Timoney J. Smart-Median: A New Real-Time Algorithm for Smoothing Singing Pitch Contours. Applied Sciences. 2022; 12(14):7026. https://doi.org/10.3390/app12147026
Chicago/Turabian StyleFaghih, Behnam, and Joseph Timoney. 2022. "Smart-Median: A New Real-Time Algorithm for Smoothing Singing Pitch Contours" Applied Sciences 12, no. 14: 7026. https://doi.org/10.3390/app12147026
APA StyleFaghih, B., & Timoney, J. (2022). Smart-Median: A New Real-Time Algorithm for Smoothing Singing Pitch Contours. Applied Sciences, 12(14), 7026. https://doi.org/10.3390/app12147026