
Effect of Rotor-Stator Spacing on Compressor Performance at Variable Operating Conditions

Abstract
:1. Introduction
2. Geometric Parameters
3. Numerical Method, Monitoring Scheme, and Data Processing Method
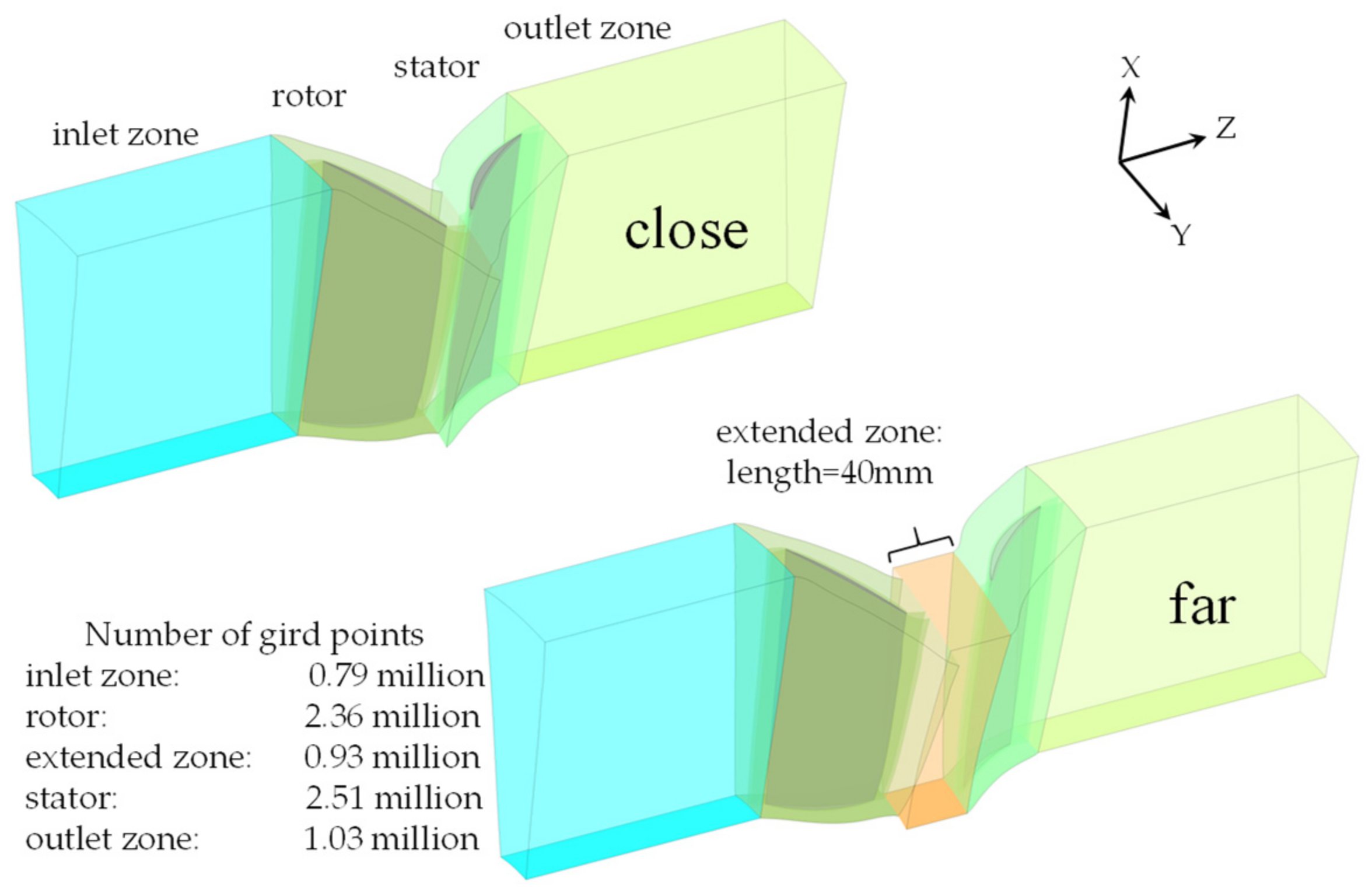
3.1. Mesh Generation
3.2. Computational Fluid Dynamics Method
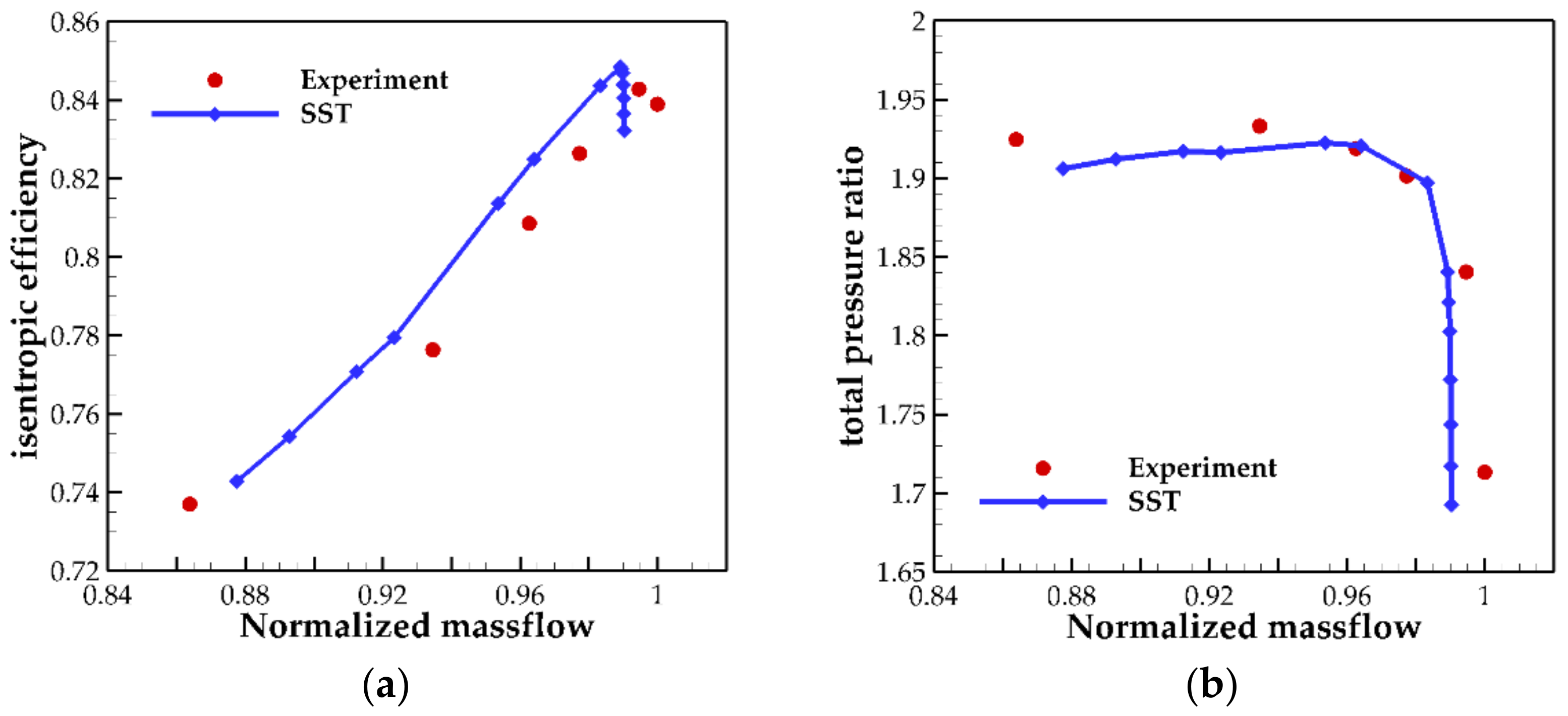
3.3. Validations of Computational Fluid Dynamics Method
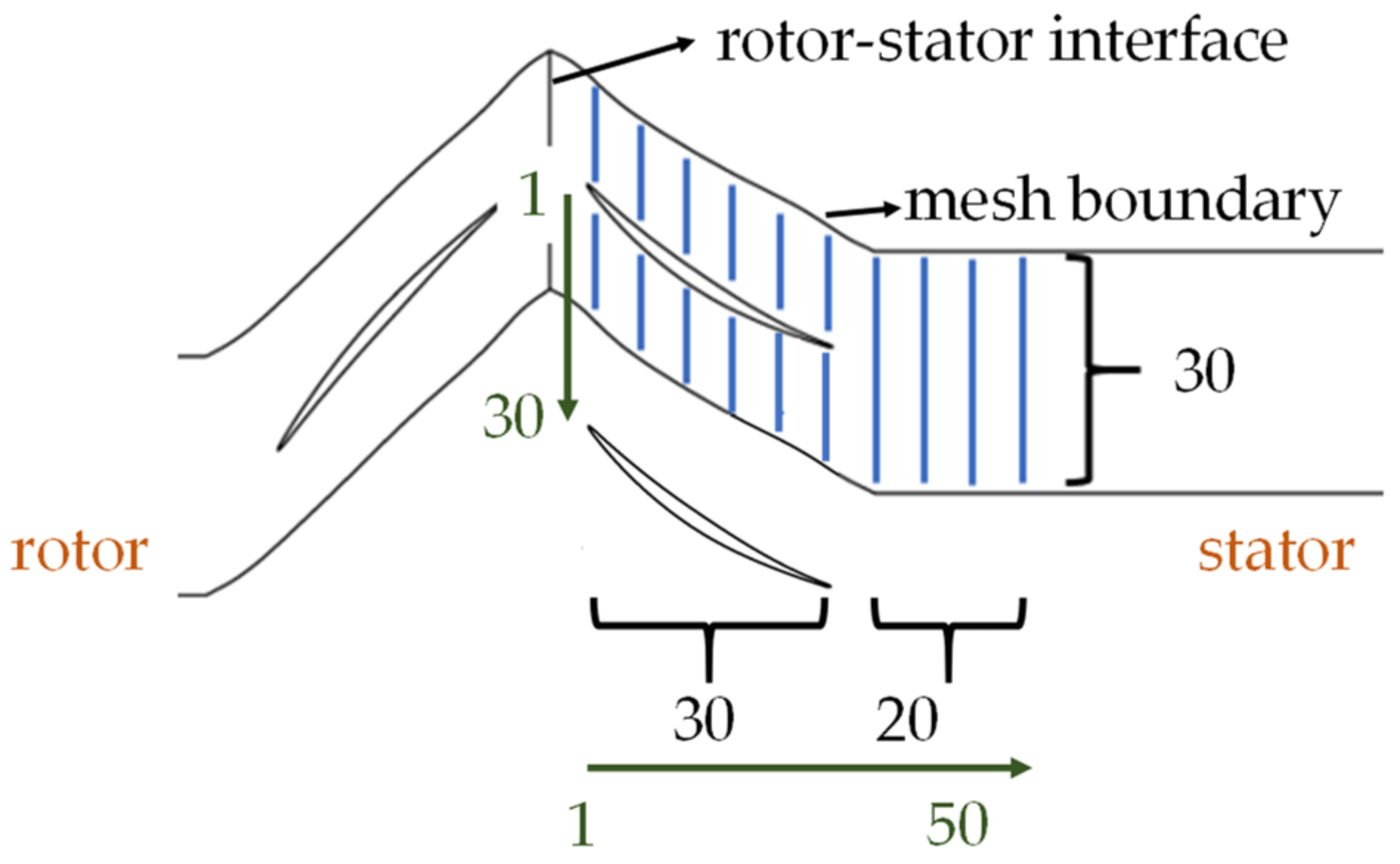
3.4. Monitor Scheme
3.5. Data Processing Method
4. Results and Discussions
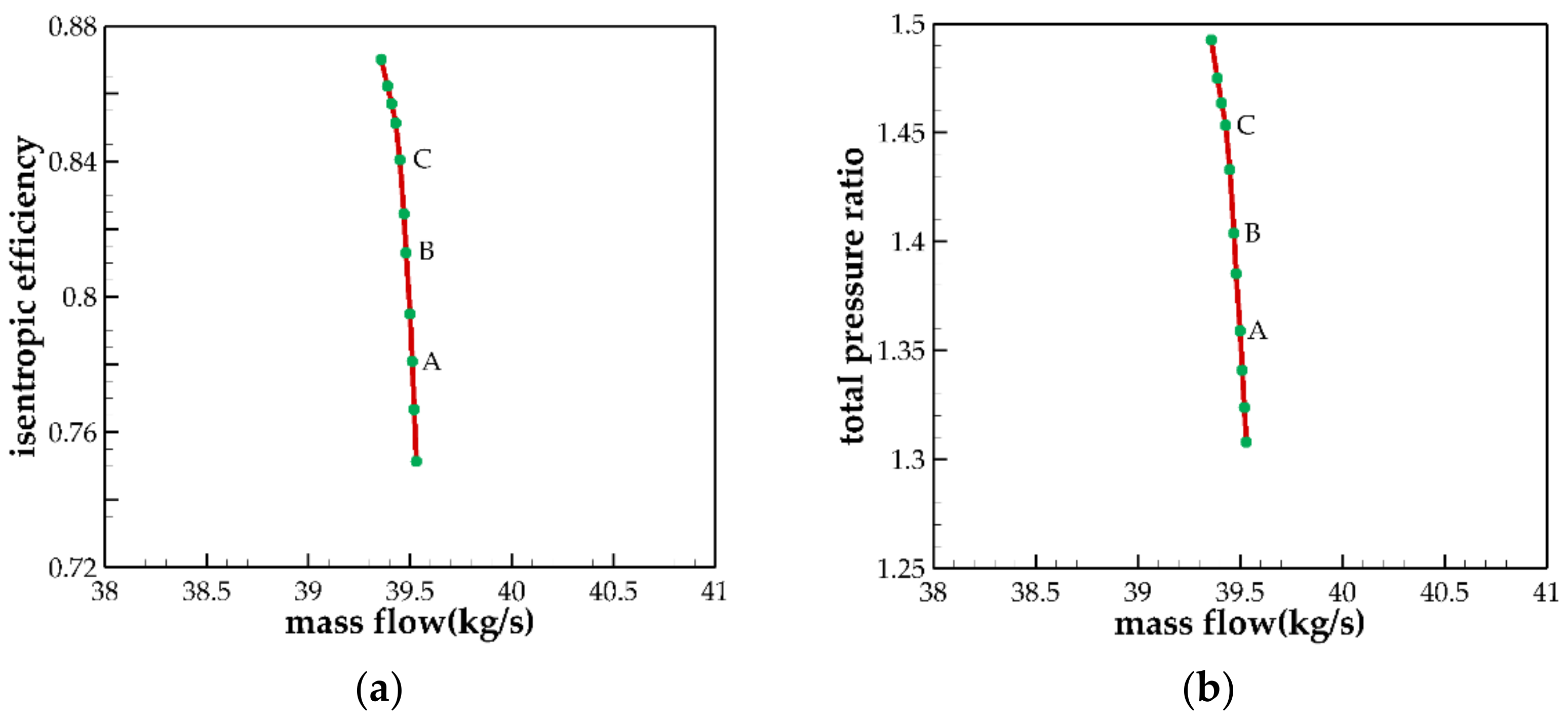
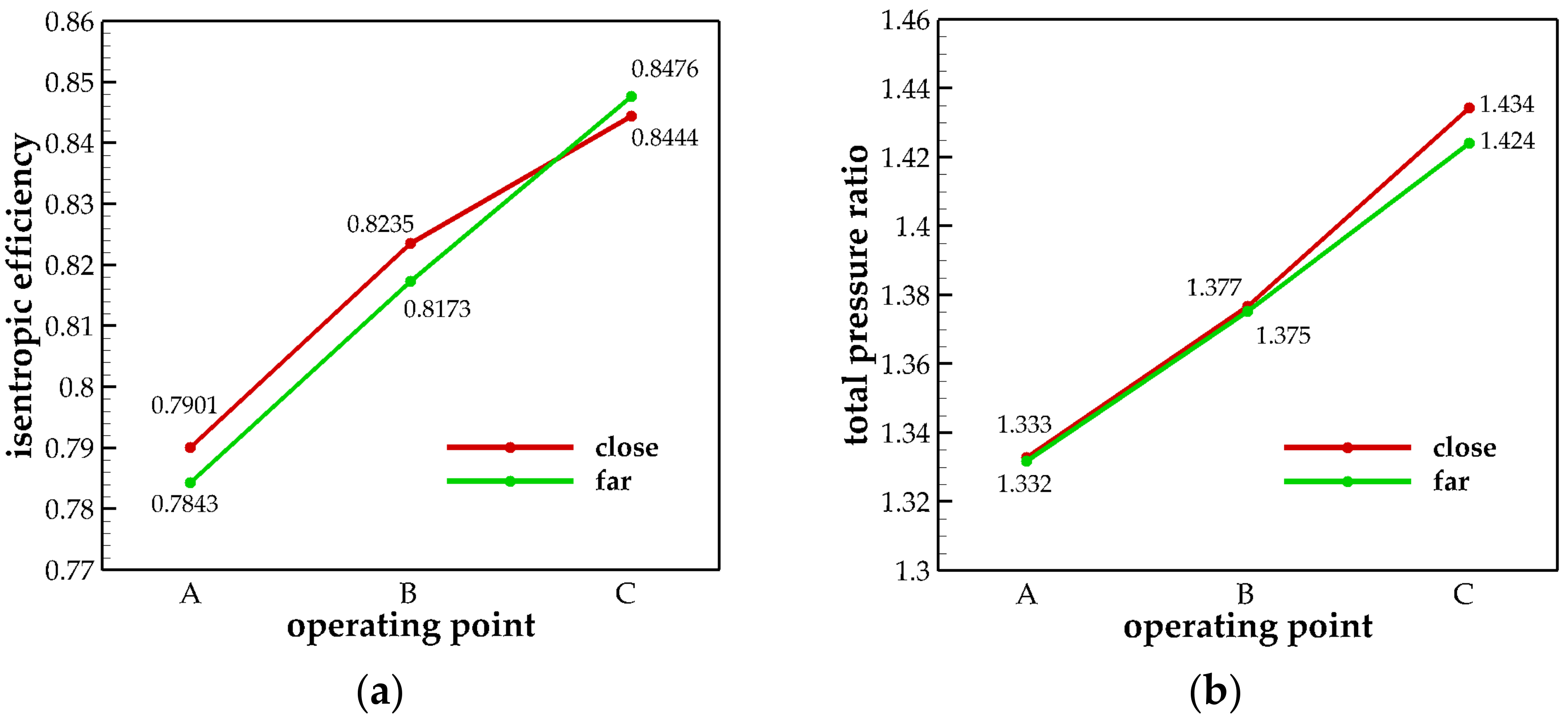
4.1. Performance Analysis
4.2. Hub Leakage Flow
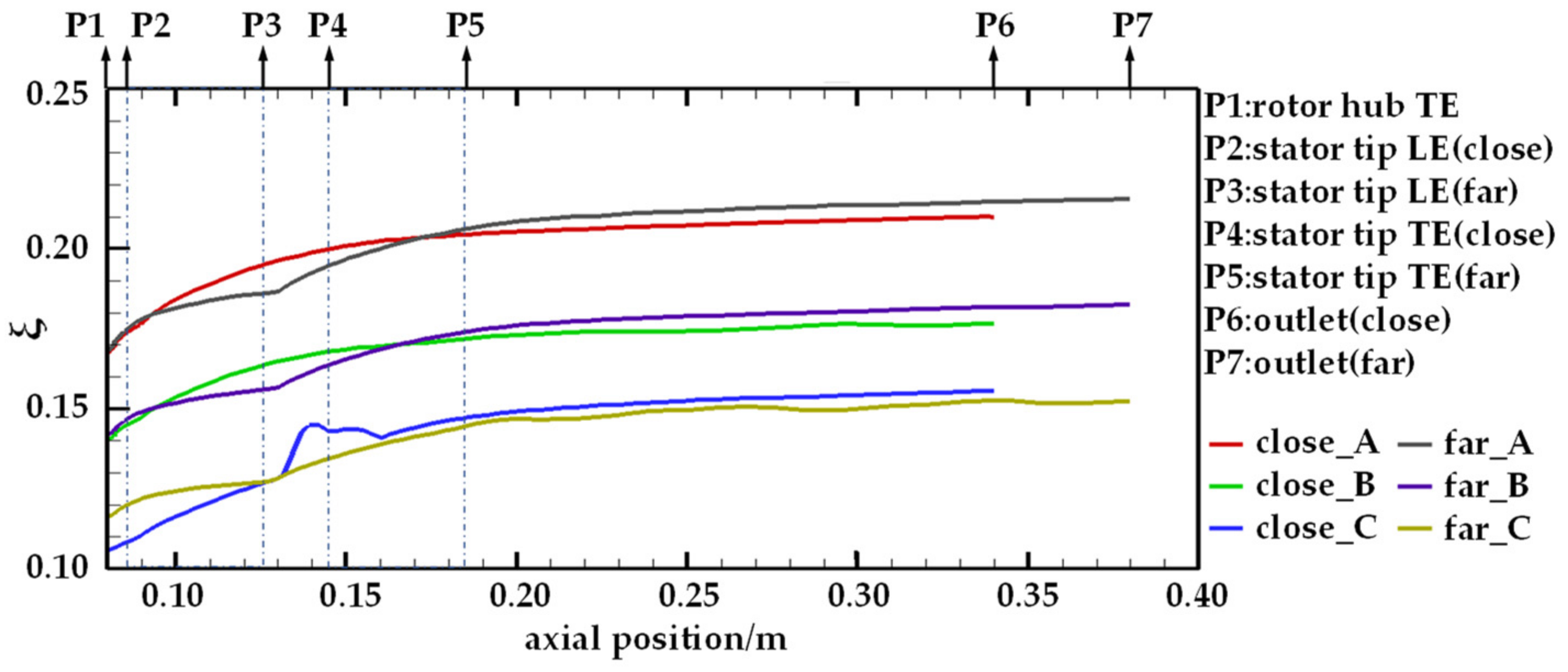
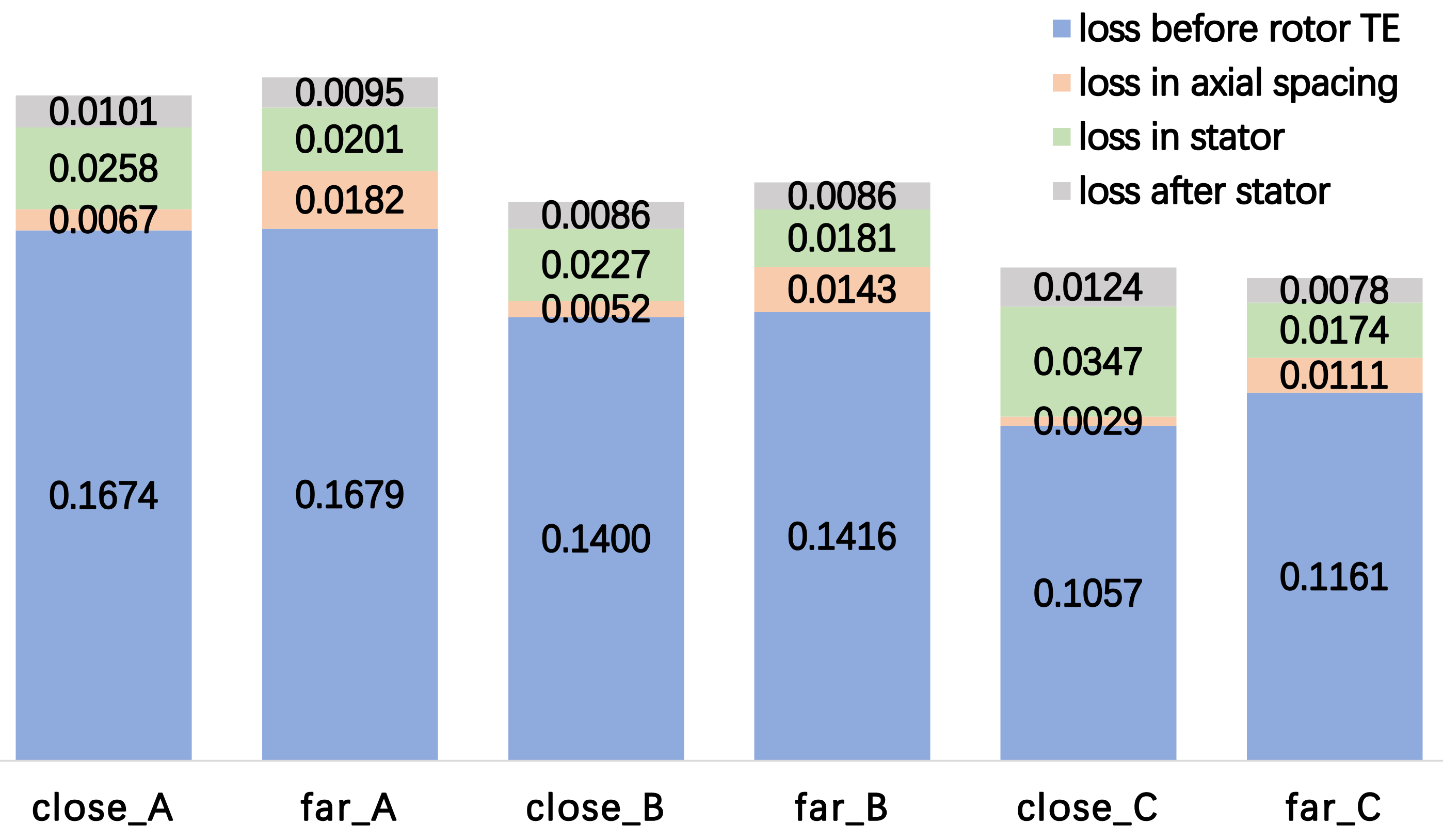
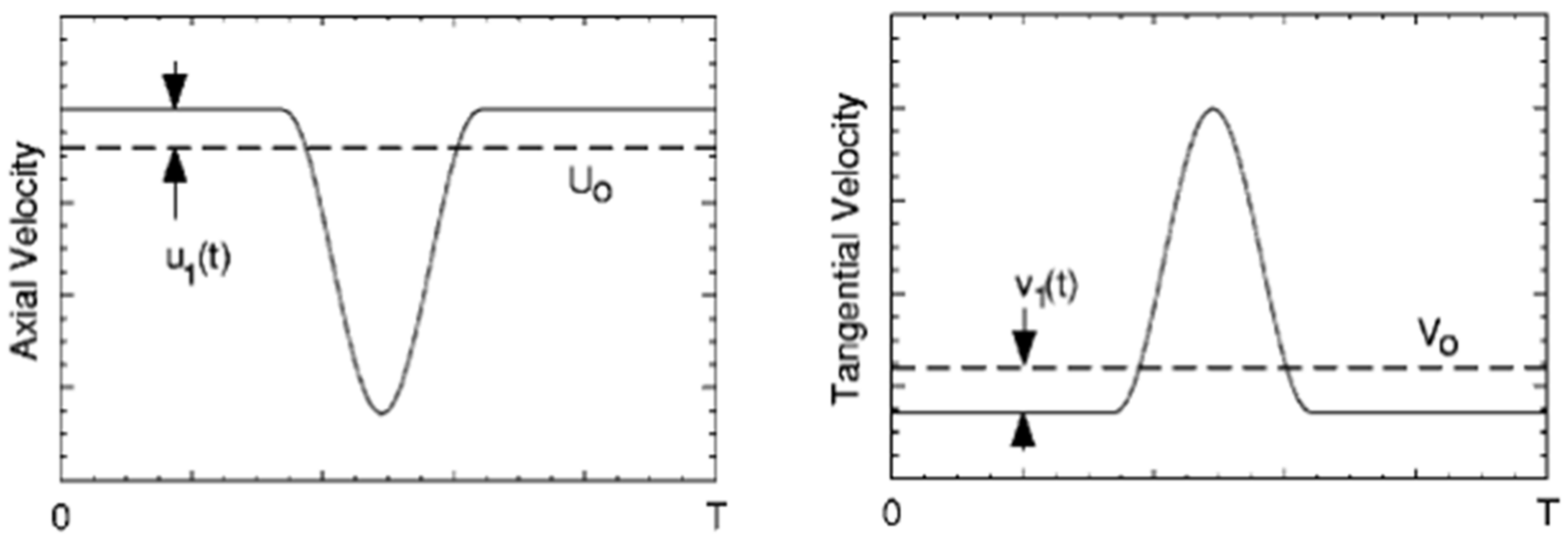
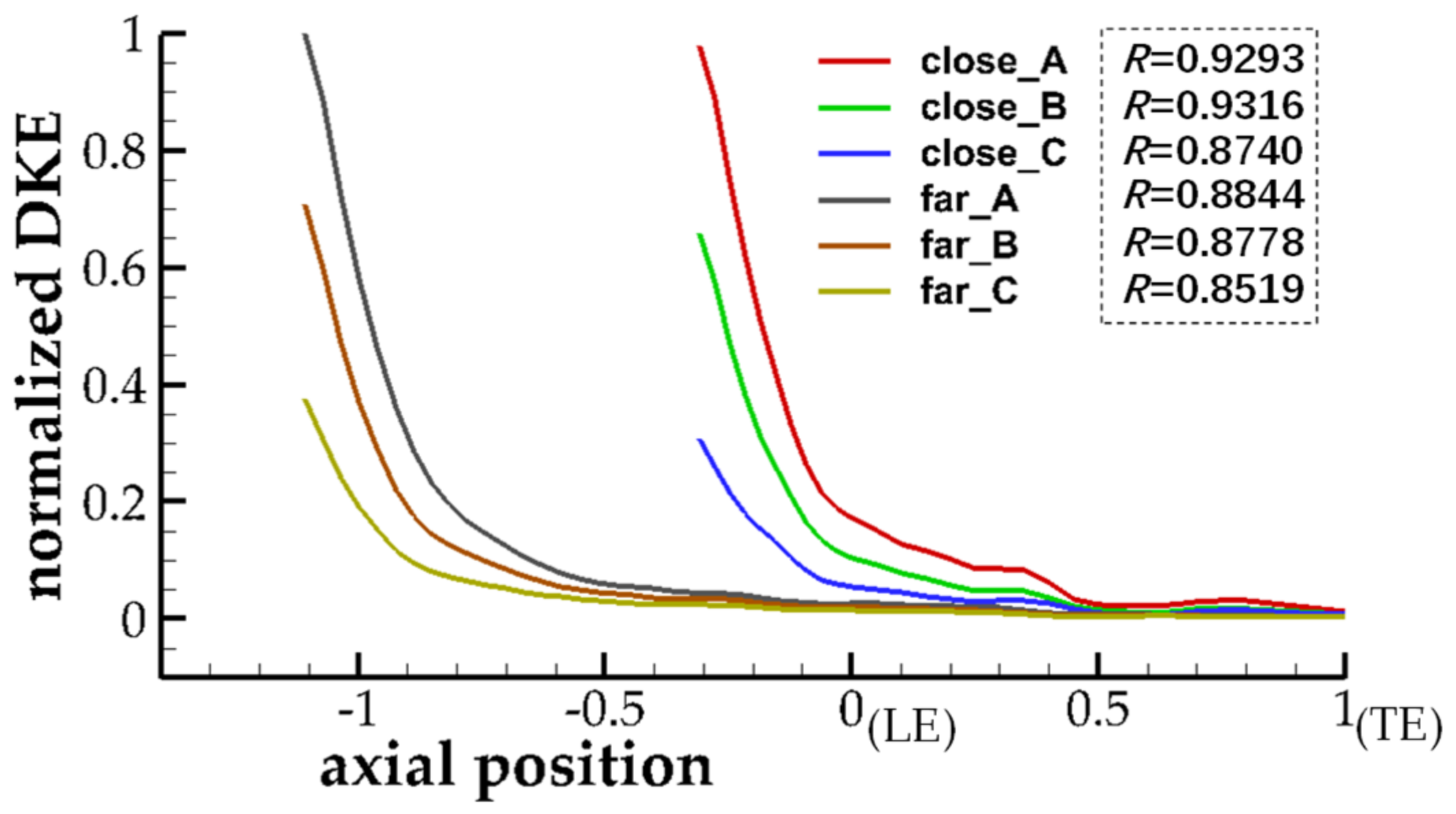
4.3. Wake Recovery
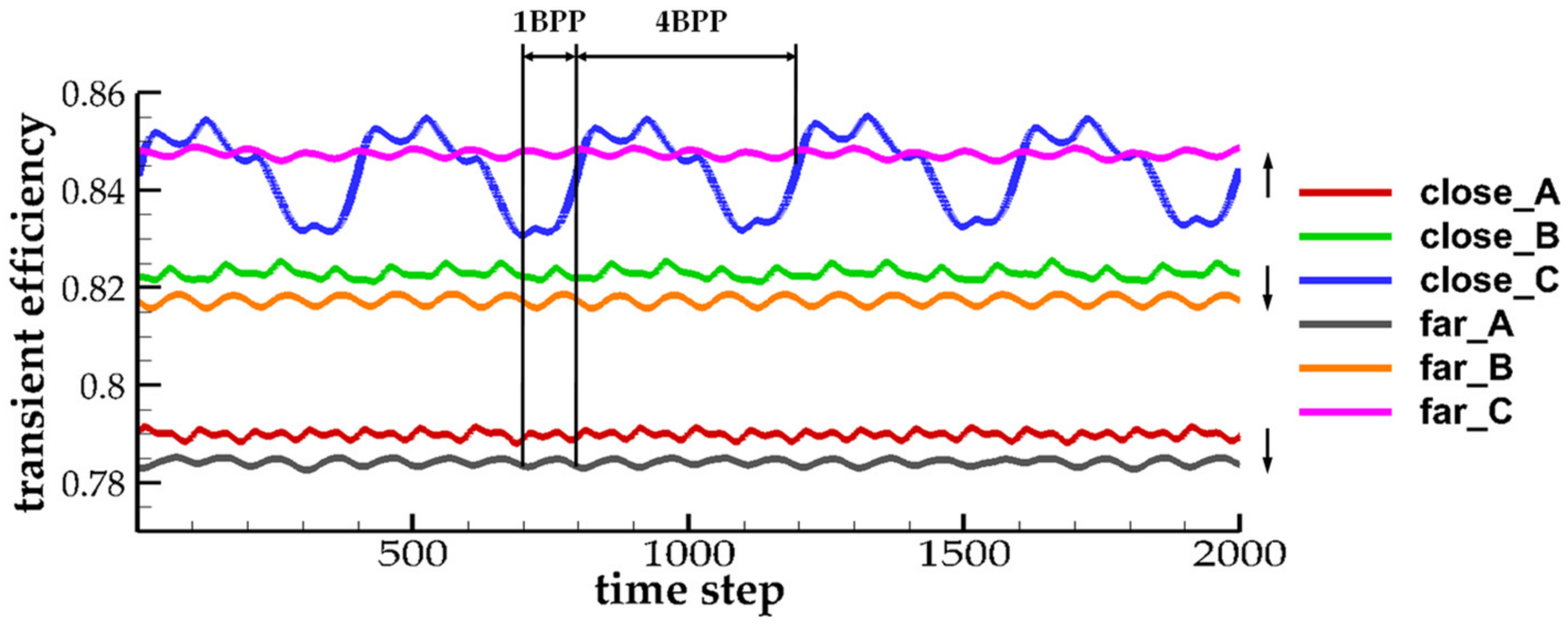
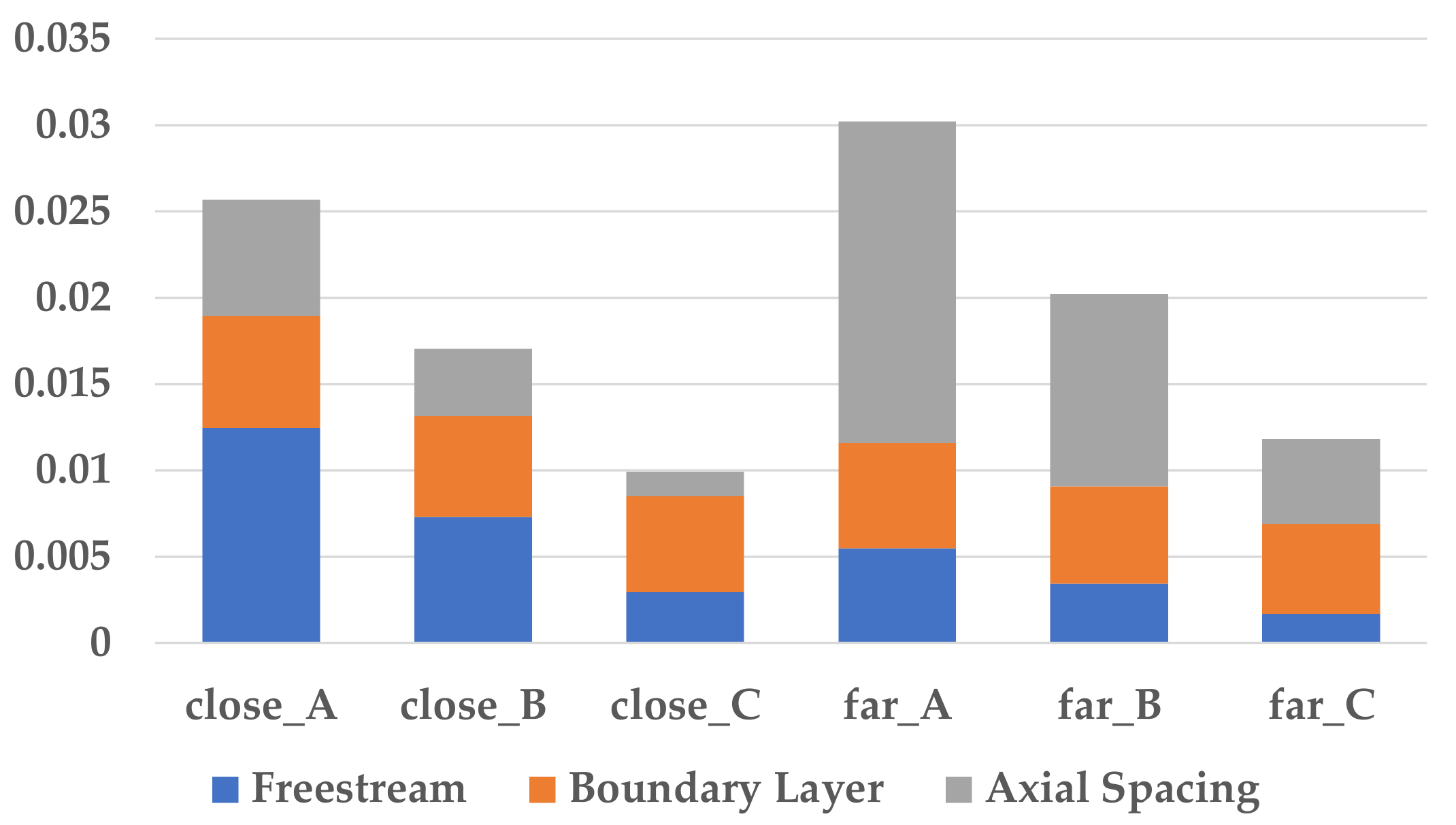
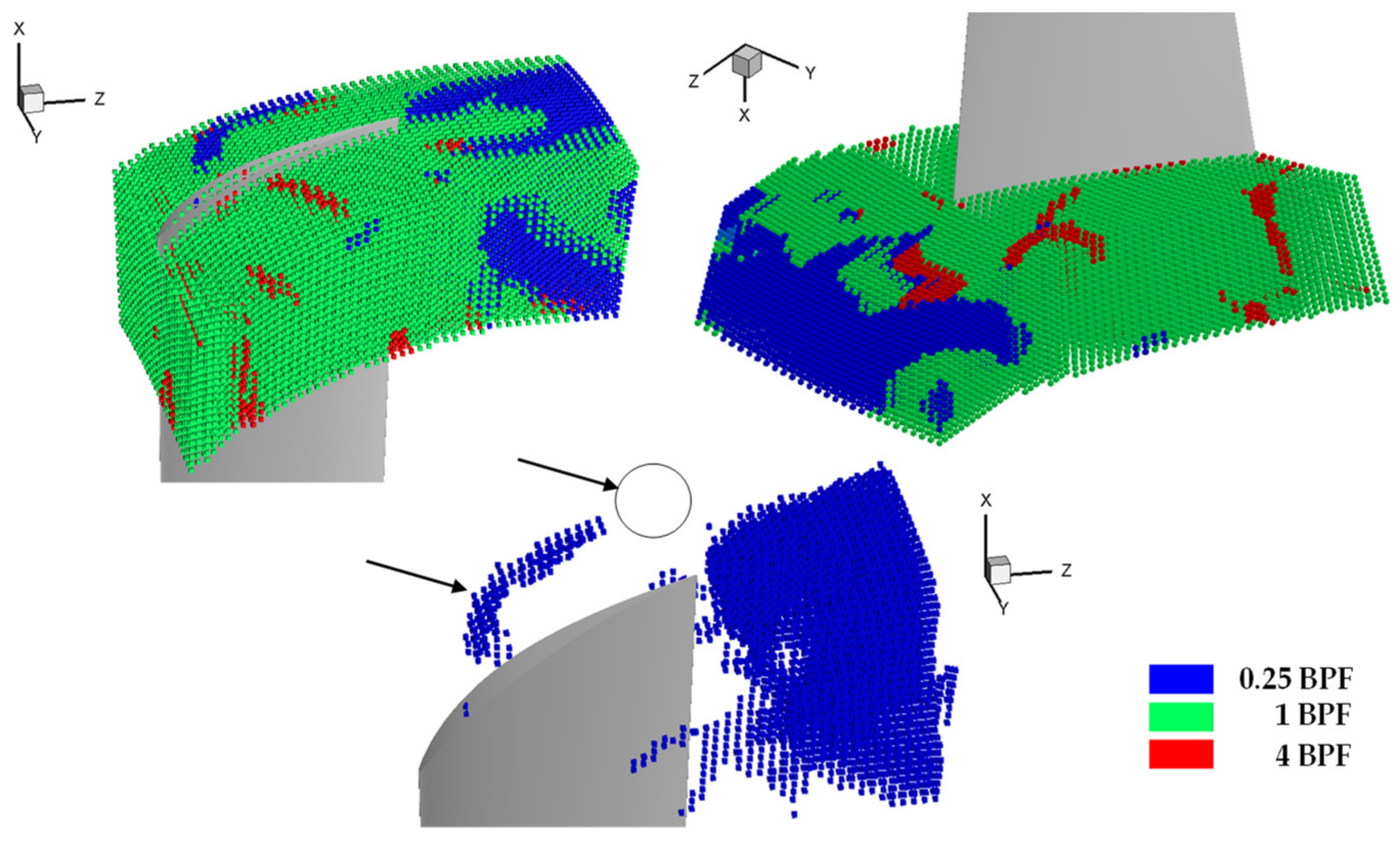
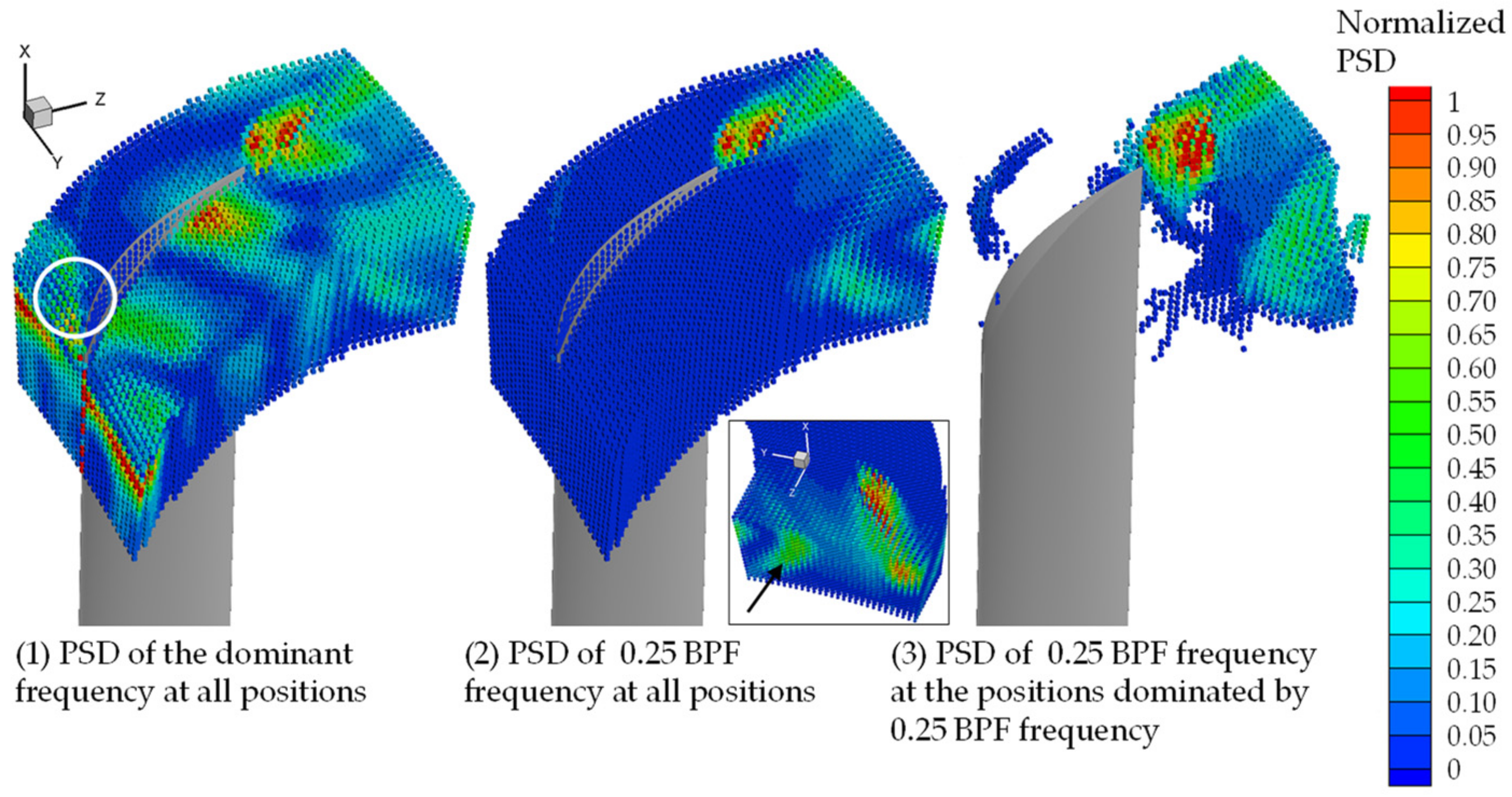
4.4. Performance Fluctuation Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| Nomenclature | |
| time-averaged isentropic efficiency | |
| time-averaged total pressure | |
| time-averaged pressure | |
| time-averaged total temperature | |
| time-averaged total pressure loss coefficient | |
| k | specific heat ratio |
| loss work | |
| enthalpy change rate across stage | |
| stagnation temperature | |
| entropy generation rate | |
| ξ | nondimensional loss coefficient |
| , | axial and tangential time-averaged velocity |
| , | axial and tangential velocity |
| pitch-wise average operator | |
| time average operator | |
| K | unsteady kinetic energy flux |
| R | wake recovery parameter |
| density | |
| turbulence eddy dissipation | |
| mass flow rate | |
| inlet velocity | |
| dynamic pressure loss | |
| potential loss | |
| Subscripts | |
| in | inlet |
| out | outlet |
| integral space |
References
- Chriss, R.M.; Copenhaver, W.W.; Gorrell, S.E. The Effects of Blade-Row Spacing on the Flow Capacity of a Transonic Rotor. In Proceedings of the ASME 1999 International Gas Turbine and Aeroengine Congress and Exhibition, Indianapolis, IN, USA, 7–10 June 1999. [Google Scholar]
- Milidonis, K.; Semlitsch, B.; Hynes, T. Effect of Clocking on Compressor Noise Generation. AIAA J. 2018, 56, 4225–4231. [Google Scholar] [CrossRef]
- Hellmich, B.; Seume, R.J. Causes of Acoustic Resonance in a High-Speed Axial Compressor. ASME J. Turbomach. 2008, 130, 31003. [Google Scholar] [CrossRef]
- Wo, A.M.; Chung, M.H.; Gorrell, S.E.; Lee, S.F. Wake Vorticity Decay and Blade Response in an Axial Compressor with Varying Axial Gap. In Proceedings of the ASME 1999 International Gas Turbine and Aeroengine Congress and Exhibition, Indianapolis, IN, USA, 7–10 June 1999. [Google Scholar]
- Smith, L.H. Casing Boundary Layers in Multistage Axial-Flow Compressors. In Flow Research in Blading; Dzung, L.S., Ed.; Elsevier: Amsterdam, The Netherlands, 1970; pp. 275–304. [Google Scholar]
- Smith, L.H. Wake Dispersion in Turbomachines. ASME J. Basic Eng. 1996, 88, 688–690. [Google Scholar] [CrossRef]
- Smith, L.H. Wake Ingestion Propulsion Benefit. J. Propuls. Power 1993, 9, 74–82. [Google Scholar] [CrossRef]
- Adamczyk, J.J. Wake mixing in axial flow compressors. In Proceedings of the ASME 1996 International Gas Turbine and Aeroengine Congress and Exhibition, Birmingham, UK, 10–13 June 1996. [Google Scholar]
- Van Zante, D.E.; Adamczyk, J.J.; Strazisar, A.J.; Okiishi, T.H. Wake Recovery Performance Benefit in a High-Speed Axial Compressor. ASME J. Turbomach. 2002, 124, 275–284. [Google Scholar] [CrossRef]
- Van de Wall, A.G.; Kadambi, J.R.; Adamczyk, J.J. A Transport Model for the Deterministic Stresses Associated with Turbomachinery Blade Row Interactions. ASME J. Turbomach. 2000, 122, 593–603. [Google Scholar] [CrossRef]
- Pallot, G.; Kato, D.; Kanameda, W.; Ohta, Y. Effect of Incoming Wakes on the Stator Performance in a Single-Stage Low Speed Axial Flow Compressor Operating at Design and Near Stall Conditions. In Proceedings of the ASME Turbo Expo 2016: Turbomachinery Technical Conference and Exposition, Seoul, Korea, 13–17 June 2016. [Google Scholar]
- Deregel, P.; Tan, C.S. Impact of Rotor Wakes on Steady-State Axial Compressor Performance. In Proceedings of the ASME 1996 International Gas Turbine and Aeroengine Congress and Exhibition, Birmingham, UK, 10–13 June 1996. [Google Scholar]
- Valkov, T.V.; Tan, C.S. Effect of Upstream Rotor Vortical Disturbances on the Time-Average Performance of Axial Compressor Stators: Part 1—Framework of Technical Approach and Wake-Stator Blade Interactions. In Proceedings of the ASME 1998 International Gas Turbine and Aeroengine Congress and Exhibition, Stockholm, Sweden, 2–5 June 1998. [Google Scholar]
- Valkov, T.V.; Tan, C.S. Effect of Upstream Rotor Vortical Disturbances on the Time-Average Performance of Axial Compressor Stators: Part 2—Rotor Tip Vortex/Streamwise Vortex-Stator Blade Interactions. In Proceedings of the ASME 1998 International Gas Turbine and Aeroengine Congress and Exhibition, Stockholm, Sweden, 2–5 June 1998. [Google Scholar]
- Hah, C. Impact of Wake Dispersion on Axial Compressor Performance. In Proceedings of the ASME Turbo Expo 2017: Turbomachinery Technical Conference and Exposition, Charlotte, NC, USA, 26–30 June 2017. [Google Scholar]
- Przytarski, P.J.; Wheeler, A.P.S. The Effect of Gapping on Compressor Performance. ASME J. Turbomach. 2020, 142, 121006. [Google Scholar] [CrossRef]
- Zachcial, A.; Nürnberger, D. A Numerical Study on the Influence of Vane-Blade Spacing on a Compressor Stage at Sub- and Transonic Operating Conditions. In Proceedings of the ASME Turbo Expo 2003, Collocated with the 2003 International Joint Power Generation Conference, Atlanta, GE, USA, 16–19 June 2003. [Google Scholar]
- Gorrell, S.E.; Car, D.; Puterbaugh, S.L.; Estevadeordal, J.; Okiishi, T.H. An Investigation of Wake-Shock Interactions in a Transonic Compressor with Digital Particle Image Velocimetry and Time-Accurate Computational Fluid Dynamics. ASME J. Turbomach. 2006, 128, 616–626. [Google Scholar] [CrossRef]
- Clark, K.P.; Gorrell, S.E. Analysis and Prediction of Shock-Induced Vortex Circulation in Transonic Compressors. ASME J. Turbomach. 2015, 137, 121007. [Google Scholar] [CrossRef]
- Estevadeordal, J.; Gorrell, S.E.; Copenhaver, W.W. PIV Study of Wake–Rotor Interactions in a Transonic Compressor at Various Operating Conditions. J. Propuls. Power 2007, 23, 235–242. [Google Scholar] [CrossRef]
- Gorrell, S.E.; Okiishi, T.H.; Copenhaver, W.W. Stator-Rotor Interactions in a Transonic Compressor—Part 1: Effect of Blade-Row Spacing on Performance. ASME J. Turbomach. 2003, 125, 328–335. [Google Scholar] [CrossRef]
- List, M.G.; Gorrell, S.E.; Turner, M.G. Investigation of Loss Generation in an Embedded Transonic Fan Stage at Several Gaps Using High-Fidelity, Time-Accurate Computational Fluid Dynamics. ASME J. Turbomach. 2010, 132, 11014. [Google Scholar] [CrossRef]
- Poensgen, C.; Gallus, H.E. Three-Dimensional Wake Decay Inside of a Compressor Cascade and Its Influence on the Downstream Unsteady Flow Field: Part II—Unsteady Flow Field Downstream of the Stator. J. Turbomach. 1991, 113, 190–197. [Google Scholar] [CrossRef]
- Sirakov, B.T.; Tan, C.S. Effect of Unsteady Stator Wake—Rotor Double-Leakage Tip Clearance Flow Interaction on Time-Average Compressor Performance. ASME J. Turbomach. 2003, 125, 465–474. [Google Scholar] [CrossRef]
- Nolan, S.P.R.; Botros, B.B.; Tan, C.S.; Adamczyk, J.J.; Greitzer, E.M.; Gorrell, S.E. Effects of Upstream Wake Phasing on Transonic Axial Compressor Performance. ASME J. Turbomach. 2011, 133, 21010. [Google Scholar] [CrossRef]
- Mailach, R.; Lehmann, I.; Vogeler, K. Periodical Unsteady Flow Within a Rotor Blade Row of an Axial Compressor—Part I: Flow Field at Midspan. ASME J. Turbomach. 2008, 130, 41004. [Google Scholar] [CrossRef]
- Lange, M.; Rolfes, M.; Mailach, R.; Schrapp, H. Periodic Unsteady Tip Clearance Vortex Development in a Low-Speed Axial Research Compressor at Different Tip Clearances. ASME J. Turbomach. 2018, 140, 31005. [Google Scholar] [CrossRef]
- Krug, A.; Busse, P.; Vogeler, K. Experimental Investigation into the Effects of the Steady Wake-Tip Clearance Vortex Interaction in a Compressor Cascade. ASME J. Turbomach. 2015, 137, 61006. [Google Scholar] [CrossRef]
- Layachi, M.Y.; Bölcs, A. Effect of the Axial Spacing Between Rotor and Stator with Regard to the Indexing in an Axial Compressor. In Proceedings of the ASME Turbo Expo 2001: Power for Land, Sea, and Air. Volume 1: Aircraft Engine; Marine; Turbomachinery; Microturbines and Small Turbomachinery, New Orleans, LA, USA, 4–7 June 2001. [Google Scholar]
- Liu, B.; Qiu, Y.; An, G.; Yu, X. Experimental Investigation of the Flow Mechanisms and the Performance Change of a Highly Loaded Axial Compressor Stage with/without Stator Hub Clearance. Appl. Sci. 2019, 9, 5134. [Google Scholar] [CrossRef] [Green Version]
- Cornelius, C.; Biesinger, T.; Galpin, P.; Braune, A. Experimental and Computational Analysis of a Multistage Axial Compressor Including Stall Prediction by Steady and Transient CFD Methods. ASME J. Turbomach. 2014, 136, 61013. [Google Scholar] [CrossRef]
- Tiralap, A.; Tan, C.S.; Donahoo, E.; Montgomery, M.; Cornelius, C. Effects of Rotor Tip Blade Loading Variation on Compressor Stage Performance. ASME J. Turbomach. 2017, 139, 51006. [Google Scholar] [CrossRef] [Green Version]
- Reid, L.; Moore, R. Performance of Single-Stage Axial-Flow Transonic Compressor with Rotor and Stator Aspect Ratios of 1.19 and 1.26, Respectively, and with Design Pressure Ratio of 1.82; Technical Publication NASA-TP-1338; NASA: Washington, DC, USA, 1978.
- Zlatinov, M.B.; Tan, C.S.; Montgomery, M.; Islam, T.; Harris, M. Turbine Hub and Shroud Sealing Flow Loss Mechanisms.ASME. J. Turbomach. 2012, 134, 61027. [Google Scholar] [CrossRef]
- Meyer, R.X. The Effect of Wakes on the Transient Pressure and Velocity Distributions in Turbomachines. Trans. ASME. 1958, 80, 1544–1551. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Hub-tip ratio | 0.416 |
| Rotational speed/rpm | 15,000 |
| Rotor aspect ratio | 2.242 |
| Stator aspect ratio | 2.598 |
| Rotor solidity(midspan) | 1.364 |
| Stator solidity(midspan) | 1.177 |
| Rotor blade count | 25 |
| Stator blade count | 25 |
| Rotor tip clearance | 0.18% span |
| Stator hub clearance | 0.90% span |
| Case | Mass Flow (KG/S) | Isentropic Efficiency | Total Pressure Ratio |
|---|---|---|---|
| close_A | 39.51 | 0.7809 | 1.341 |
| close_B | 39.48 | 0.8130 | 1.385 |
| close_C | 39.45 | 0.8405 | 1.433 |
| far_A | 39.53 | 0.7791 | 1.333 |
| far_B | 39.48 | 0.8141 | 1.376 |
| far_C | 39.40 | 0.8422 | 1.436 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Niu, H.; Chen, J.; Xiang, H. Effect of Rotor-Stator Spacing on Compressor Performance at Variable Operating Conditions. Appl. Sci. 2022, 12, 6932. https://doi.org/10.3390/app12146932
Niu H, Chen J, Xiang H. Effect of Rotor-Stator Spacing on Compressor Performance at Variable Operating Conditions. Applied Sciences. 2022; 12(14):6932. https://doi.org/10.3390/app12146932
Chicago/Turabian StyleNiu, Han, Jiang Chen, and Hang Xiang. 2022. "Effect of Rotor-Stator Spacing on Compressor Performance at Variable Operating Conditions" Applied Sciences 12, no. 14: 6932. https://doi.org/10.3390/app12146932
APA StyleNiu, H., Chen, J., & Xiang, H. (2022). Effect of Rotor-Stator Spacing on Compressor Performance at Variable Operating Conditions. Applied Sciences, 12(14), 6932. https://doi.org/10.3390/app12146932