
Development and Assessment of an Intelligent Compaction System for Compaction Quality Monitoring, Assurance, and Management



Abstract
1. Introduction
2. Intelligent Compaction System
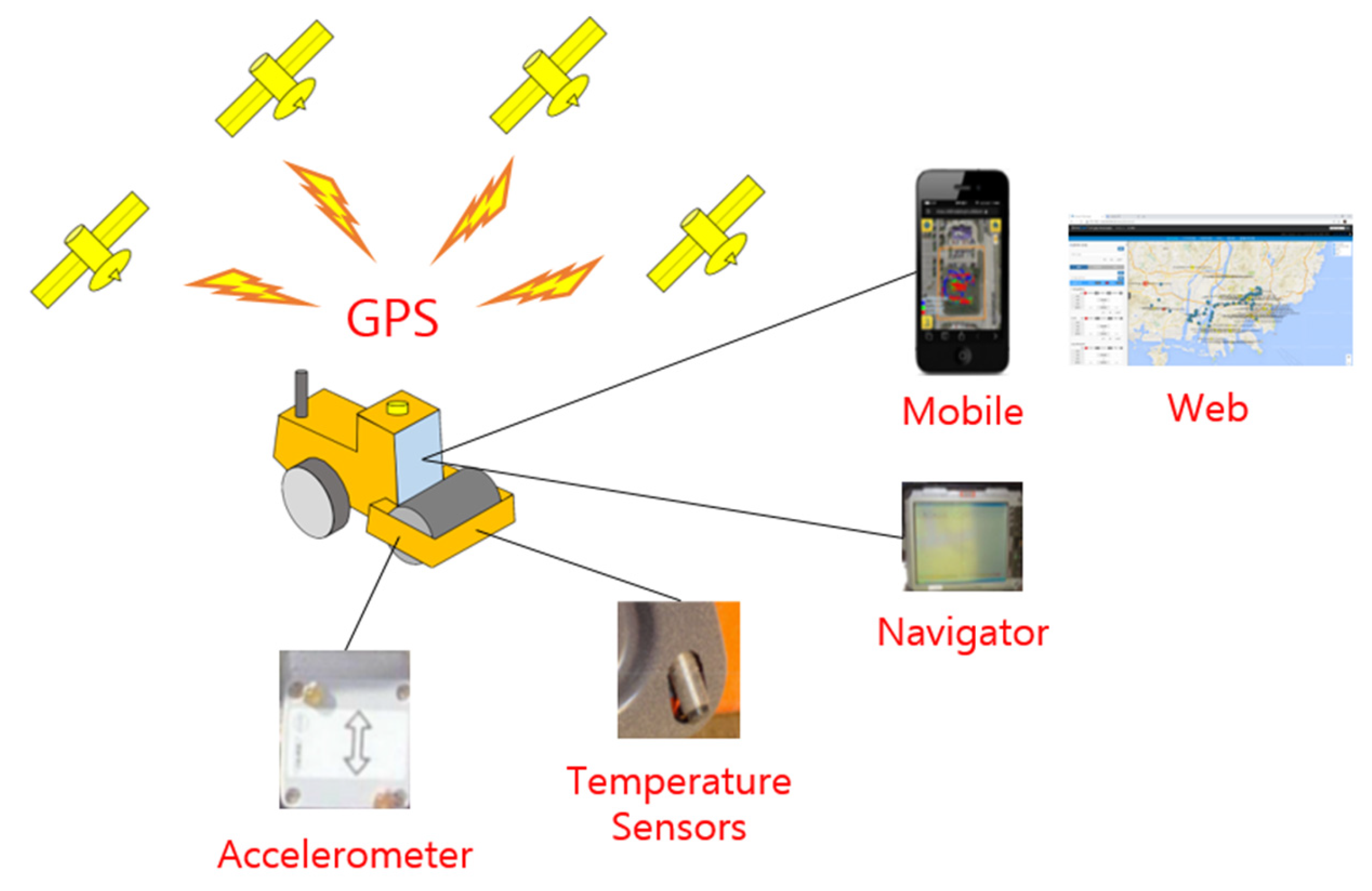
2.1. System Hardware
2.2. System Software
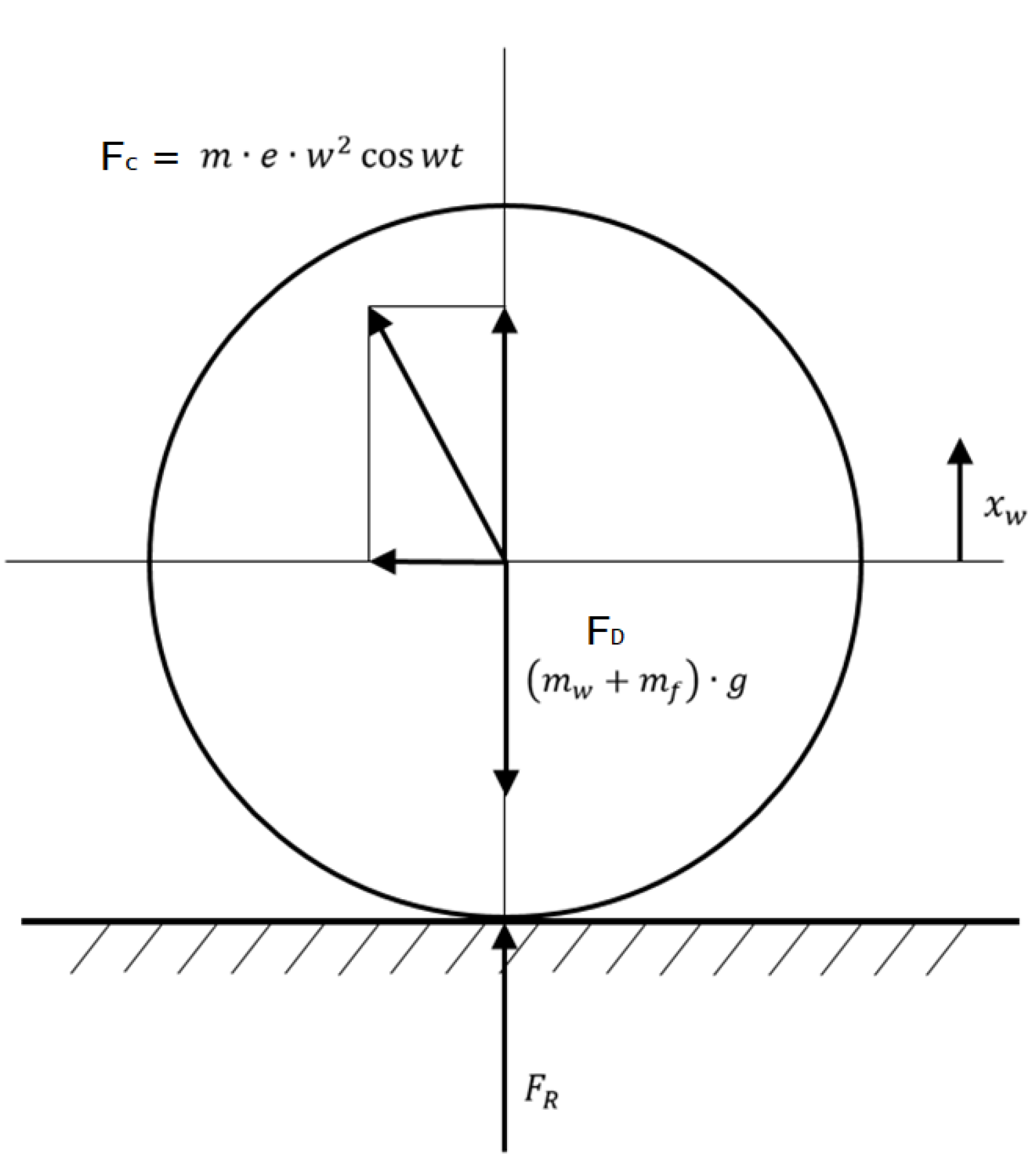
2.3. Compaction Strength Measurement
3. Correlation and Implementation
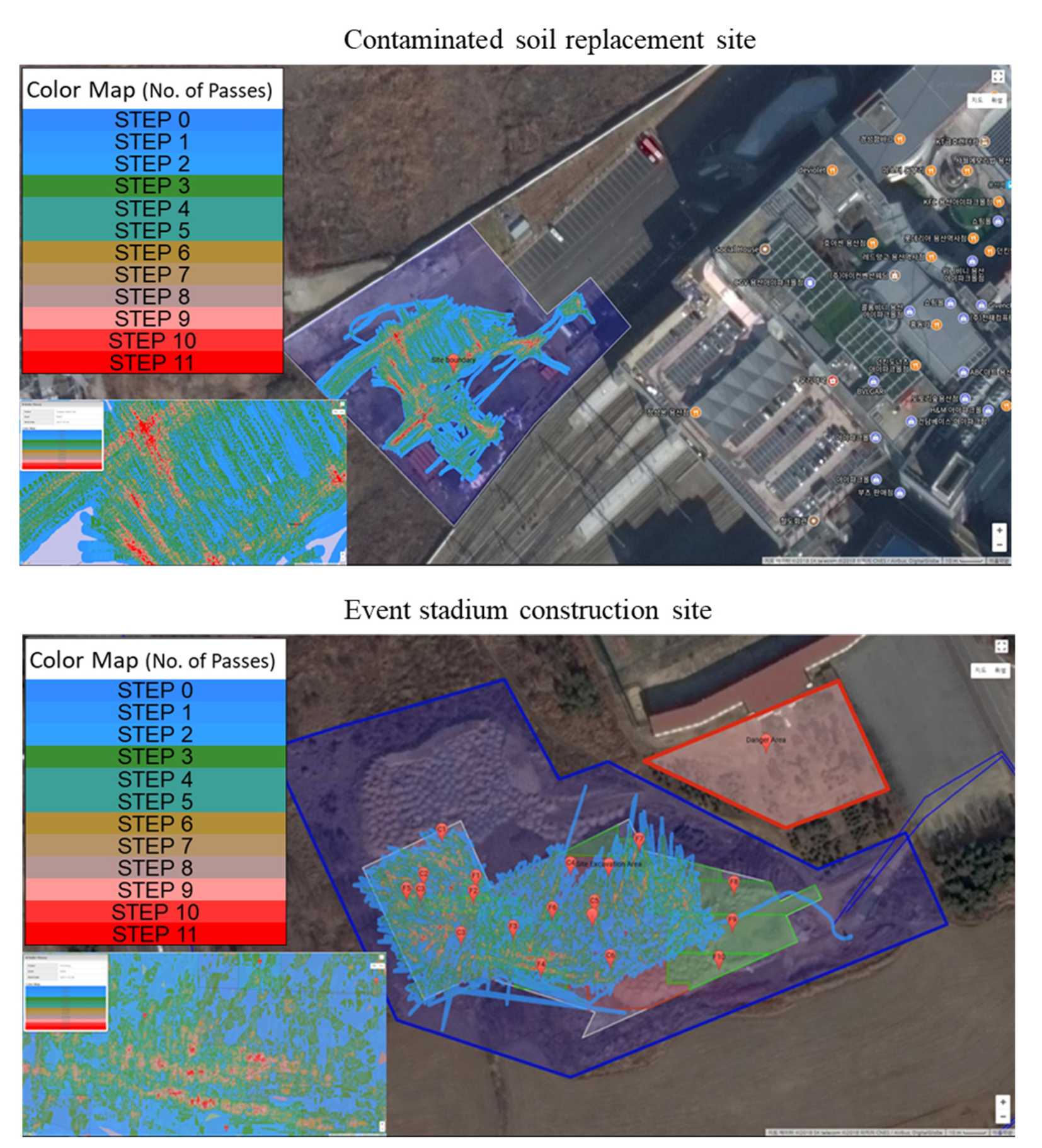
3.1. Construction Site Description
3.2. In Situ Measurements
- Select the test area with the level surface or make it as level as the plate size. Remove any loose material or embedded fragments.
- Install the bearing plate and force measurement system.
- Add a 0.35 kg/cm2 load to stabilize the plate and adjust the force measuring gauge to zero.
- Add 0.35 kg/cm2 loads in incremental steps and record the settlement against each incremental load.
- The test terminates when the settlement reaches 1.5 cm or when the applied force exceeds the material’s yield point.
- Identify the load strength at the 0.25 cm settlement for each interval of test and calculate the bearing coefficient kg/cm3 by comparing it with the Korean Standard.
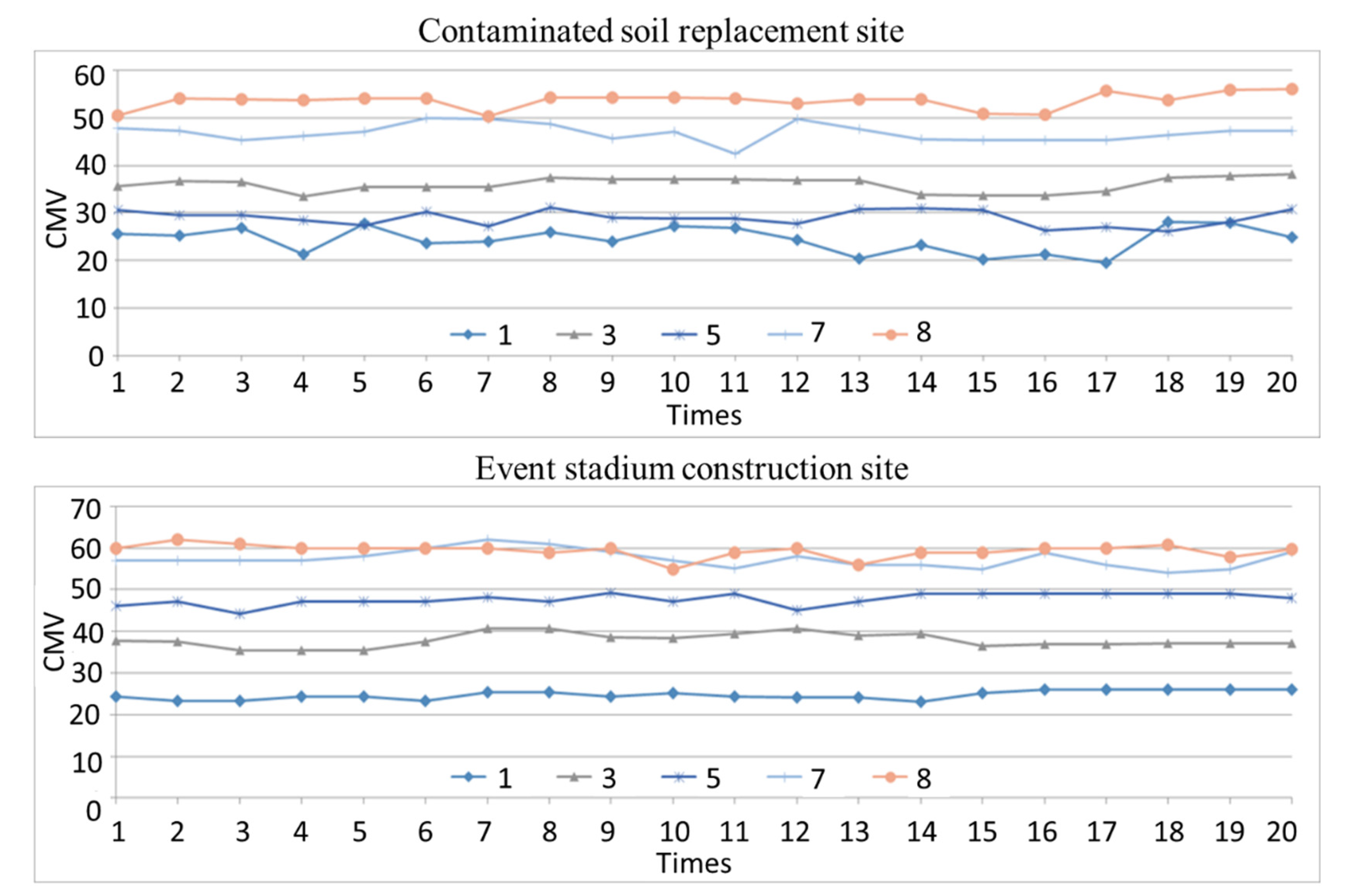
3.3. Intelligent Compaction System Measurements
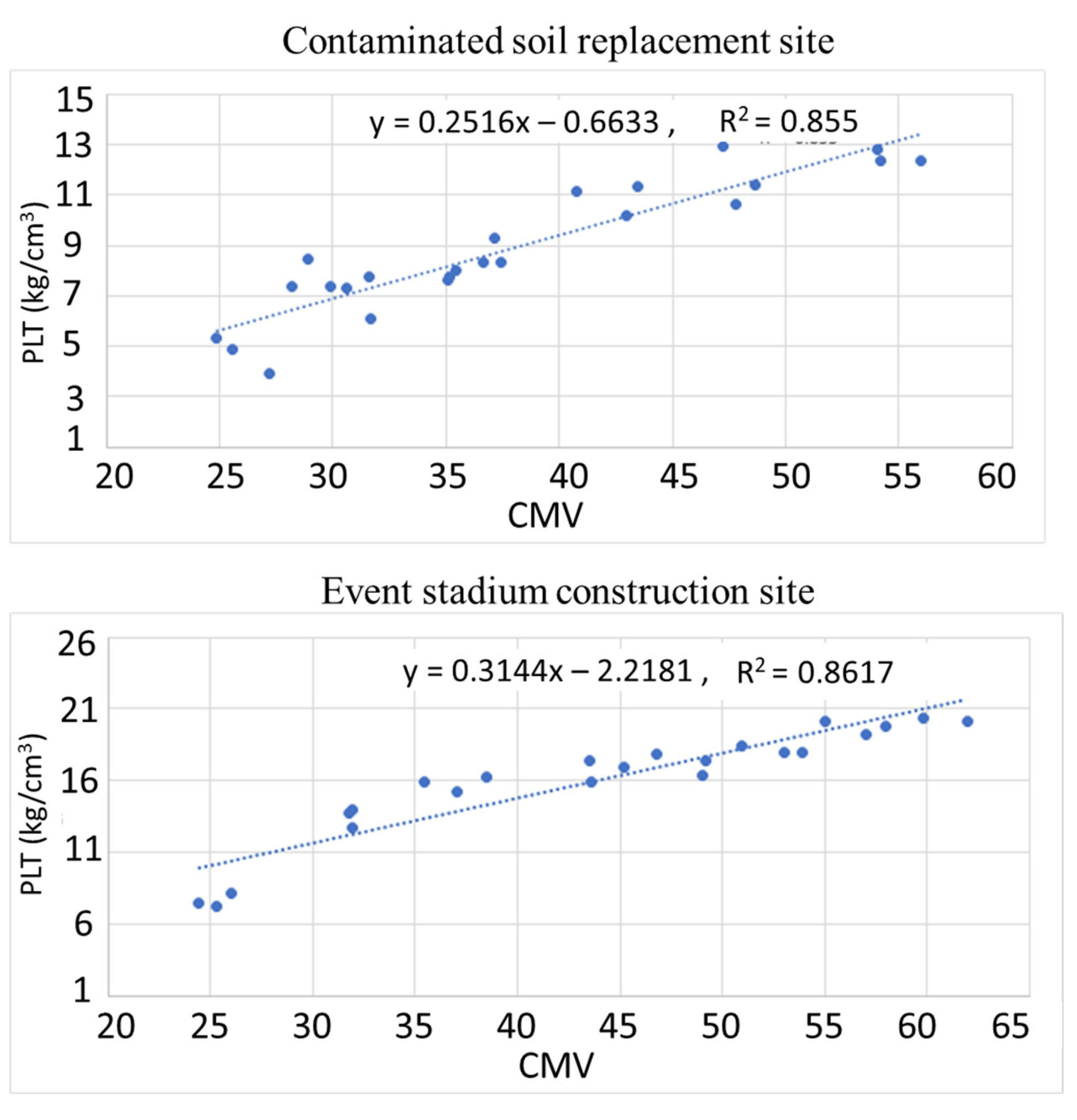
3.4. CMV and PLT Relationship
3.5. Implementation and Visualization of Compaction Information
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| CCC | Continuous Compaction Control |
| CMV | Compaction Meter Value |
| CPT | Cone Penetration Testing |
| DCP | Dynamic Cone Penetration |
| ERD | Entity-Relation Diagram |
| FFT | Fast Fourier Transform |
| FHWA | Federal Highway Administration |
| FT | Fourier Transform |
| FWD | Falling Weight Reflectometer |
| GPS | Global Positioning System |
| IC | Intelligent Compaction |
| ICMV | Intelligent Compaction Measurement Values |
| INDOT | Indiana Department of Transportation |
| LWD | Light Weight Reflectometer |
| NG | Nuclear Gauge |
| NMEA | National Marine Electronics Association |
| PLT | Plate Load Test |
| QC | Quality Control |
| QA | Quality Assurance |
| SCRM | Sand Cone Replacement Method |
| SDG | Electrical Soil Density Gauge |
| USDOT | United States Department of Transportation |
| UTC | Universal Time Coordinated |
References
- Vaccari, M.; Pannocchia, G.; Tognotti, L.; Paci, M.; Bonciani, R. A Rigorous Simulation Model of Geothermal Power Plants for Emission Control. Appl. Energy 2020, 263, 114563. [Google Scholar] [CrossRef]
- Liu, D.; Wang, Y.; Chen, J.; Zhang, Y. Intelligent Compaction Practice and Development: A Bibliometric Analysis. Eng. Constr. Archit. Manag. 2020, 27, 1213–1232. [Google Scholar] [CrossRef]
- Zhang, Q.; An, Z.; Huangfu, Z.; Li, Q. A Review on Roller Compaction Quality Control and Assurance Methods for Earthwork in Five Application Scenarios. Materials 2022, 15, 2610. [Google Scholar] [CrossRef]
- Cai, H.; Kuczek, T.; Dunston, P.S.; Li, S. Correlating Intelligent Compaction Data to In Situ Soil Compaction Quality Measurements. J. Constr. Eng. Manag. 2017, 143, 04017038. [Google Scholar] [CrossRef]
- Sharafat, A.; Khan, M.S.; Latif, K.; Tanoli, W.A.; Park, W.; Seo, J. BIM-GIS-Based Integrated Framework for Underground Utility Management System for Earthwork Operations. Appl. Sci. 2021, 11, 5721. [Google Scholar] [CrossRef]
- Bacci di Capaci, R.; Scali, C. A Cloud-Based Monitoring System for Performance Assessment of Industrial Plants. Ind. Eng. Chem. Res. 2020, 59, 2341–2352. [Google Scholar] [CrossRef]
- Tanoli, W.A.; Seo, J.W.; Sharafat, A.; Lee, S.S. 3D Design Modeling Application in Machine Guidance System for Earthwork Operations. KSCE J. Civ. Eng. 2018, 22. [Google Scholar] [CrossRef]
- Tanoli, W.A.; Sharafat, A.; Park, J.; Seo, J.W. Damage Prevention for Underground Utilities Using Machine Guidance. Autom. Constr. 2019, 107, 102893. [Google Scholar] [CrossRef]
- Sharafat, A.; Khan, M.S.; Latif, K.; Seo, J. BIM-Based Tunnel Information Modeling Framework for Visualization, Management, and Simulation of Drill-and-Blast Tunneling Projects. J. Comput. Civ. Eng. 2021, 35, 04020068. [Google Scholar] [CrossRef]
- Anjan, K.S.; Aldouri, R.; Nazarian, S.; Si, J. Accelerated Assessment of Quality of Compacted Geomaterials with Intelligent Compaction Technology. Constr. Build. Mater. 2016, 113, 824–834. [Google Scholar] [CrossRef]
- Mazumder, M.; Yun, J.; Lee, S.-J.; Jeong, K.-D. Cost-Effectiveness of Conventional Compaction (CC) and Intelligent Compaction (IC) Methods of Asphalt Pavement Overlay. Sustainability 2021, 13, 11830. [Google Scholar] [CrossRef]
- Zhu, X.; Bai, S.; Xue, G.; Yang, J.; Cai, Y.; Hu, W.; Jia, X.; Huang, B. Assessment of Compaction Quality of Multi-Layer Pavement Structure Based on Intelligent Compaction Technology. Constr. Build. Mater. 2018, 161, 316–329. [Google Scholar] [CrossRef]
- Hu, W.; Shu, X.; Jia, X.; Huang, B. Recommendations on Intelligent Compaction Parameters for Asphalt Resurfacing Quality Evaluation. J. Constr. Eng. Manag. 2017, 143, 04017065. [Google Scholar] [CrossRef]
- Liu, D.; Lin, M.; Li, S. Real-Time Quality Monitoring and Control of Highway Compaction. Autom. Constr. 2016, 62, 114–123. [Google Scholar] [CrossRef]
- Meehan, C.L.; Cacciola, D.V.; Tehrani, F.S.; Baker, W.J. Assessing Soil Compaction Using Continuous Compaction Control and Location-Specific in Situ Tests. Autom. Constr. 2017, 73, 31–44. [Google Scholar] [CrossRef]
- White, D.J.; Thompson, M.J.; Vennapusa, P.; Siekmeier, J. Implementing Intelligent Compaction Specification on Minnesota TH-64. Transp. Res. Rec. J. Transp. Res. Board 2008, 2045, 1–9. [Google Scholar] [CrossRef]
- Xu, Q.; Chang, G.K. Adaptive Quality Control and Acceptance of Pavement Material Density for Intelligent Road Construction. Autom. Constr. 2016, 62, 78–88. [Google Scholar] [CrossRef]
- Cho, Y.-K.; Kabassi, K.; Wang, C. Framework of Non-Nuclear Methods Evaluation for Soil QC and QA in Highway Pavement Construction. J. Constr. Eng. Proj. Manag. 2012, 2, 45–52. [Google Scholar] [CrossRef][Green Version]
- Forssblad, L. Compaction Meter on Vibrating Rollers for Improved Compaction Control. In Proceedings of the International Conference on Compaction, Paris, France, 22–24 April 1980; Volume 2, pp. 541–546. [Google Scholar]
- Thurner, H.F.; Sandström, A. Compaction Meter and Compaction Documentation System. In Unbound Aggregates in Roads; Elsevier: Amsterdam, The Netherlands, 1989; pp. 46–51. [Google Scholar]
- Nohse, Y.; Uchiyama, K.; Kanamori, Y.; Kase, J.; Kawai, Y.; Masumura, K.; Tateyama, K. An Attempt Applying a New Control System for the Vibratory Compaction Using GPS and CMV in the Embankment Construction (Part 1). In Proceedings of the 13th International Conference of the ISTVS, Munich, Germany, 14–17 September 1999; pp. 295–300. [Google Scholar]
- White, D.J.; Jaselskis, E.J.; Schaefer, V.R.; Cackler, E.T. Real-Time Compaction Monitoring in Cohesive Soils from Machine Response. Transp. Res. Rec. J. Transp. Res. Board 2005, 1936, 172–180. [Google Scholar] [CrossRef]
- Thompson, M.J.; White, D.J. Field Calibration and Spatial Analysis of Compaction-Monitoring Technology Measurements. Transp. Res. Rec. J. Transp. Res. Board 2007, 2004, 69–79. [Google Scholar] [CrossRef]
- Liu, D.; Li, Z.; Lian, Z. Compaction Quality Assessment of Earth-Rock Dam Materials Using Roller-Integrated Compaction Monitoring Technology. Autom. Constr. 2014, 44, 234–246. [Google Scholar] [CrossRef]
- Brandl, H.; Adam, D. Sophisticated Continuous Compaction Control of Soils and Granular Materials. In Proceedings of the International Conference on Soil Mechanics and Foundation Engineering, Hamburg, Germany, 6–12 September 1999; pp. 31–36. [Google Scholar]
- White, D.J.; Vennapusa, P.K.R.; Gieselman, H.H. Field Assessment and Specification Review for Roller-Integrated Compaction Monitoring Technologies. Adv. Civ. Eng. 2011, 2011, 783836. [Google Scholar] [CrossRef]
- Langley, R. Nmea 0183: A Gps Receiver. GPS World 1995, 6, 54–57. [Google Scholar]
- Lee, S.S.; Park, S.; Seo, J. Utilization Analysis Methodology for Fleet Telematics of Heavy Earthwork Equipment. Autom. Constr. 2018, 92, 59–67. [Google Scholar] [CrossRef]
- Vennapusa, P.K.R.; White, D.J.; Morris, M.D. Geostatistical Analysis for Spatially Referenced Roller-Integrated Compaction Measurements. J. Geotech. Geoenvironmental Eng. 2010, 136, 813–822. [Google Scholar] [CrossRef]
- Torres, A.N.; Arasteh, M. Intelligent Compaction Measurement Values (ICMV)—A Road Map. 2017. Available online: https://rosap.ntl.bts.gov/view/dot/38338 (accessed on 19 June 2022).
- Hu, W.; Shu, X.; Huang, B.; Woods, M.E. An Examination of Compaction Meter Value for Asphalt Pavement Compaction Evaluation. Int. J. Pavement Eng. 2018, 19, 447–455. [Google Scholar] [CrossRef]
- Hu, W.; Huang, B.; Shu, X.; Woods, M. Utilising Intelligent Compaction Meter Values to Evaluate Construction Quality of Asphalt Pavement Layers. Road Mater. Pavement Des. 2017, 18, 980–991. [Google Scholar] [CrossRef]
- Sandström, A.J.; Pettersson, C.B. Intelligent Systems for QA/QC in Soil Compaction. In Proceedings of the 83rd Annual Transportation Research Board Meeting, Washington, DC, USA, 11–15 January 2004; pp. 11–14. [Google Scholar]
- White, D.J.; Thompson, M.J. Relationships between in Situ and Roller-Integrated Compaction Measurements for Granular Soils. J. Geotech. Geoenvironmental Eng. 2008, 134, 1763–1770. [Google Scholar] [CrossRef]
- Ministry of Land, Infrastructure, and Transport (MOLIT). Road Construction Standard Specification; Ministry of Land, Infrastructure, and Transport (MOLIT): Sejong-si, Korea, 2016; ISBN 979-1-159-67057-2.












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Field | Example | Details |
|---|---|---|
| c | GGA | Global Positioning System Fix Data |
| UTC | 123,519 | hhmmss.sss |
| Latitude | 4807.038 | ddmm.mmmm |
| N/S indicator | N | N = North, S = South |
| Longitude | 01131.324 | dddmm.mmmm |
| E/W indicator | E | E = East, W = West |
| Position Fix | 1 | 0 = Invalid, 1 = Valid SPS, 2 = Valid DGPS, 3= Valid PPS |
| Satellite Used | 08 | Satellite being used (0–12) |
| HDOP | 0.9 | Horizontal dilution of precision |
| Altitude | 545.4 | Altitude in meters according to WGS-84 ellipsoid |
| Altitude Unit | M | M = Meters |
| Geoid Separation | 46.9 | Geoid separation in meters according to WGS-84 ellipsoid |
| Separation Units | M | M = Meters |
| DGPS Age | (empty field) | Age of DGPS data in seconds |
| DGPS Station ID | (empty field) | - |
| Checksum | * 42 | - |
| Terminator | (CR)/(LF) | - |
| Roller MV | Unit | Calculation Equation | IC System |
|---|---|---|---|
| Compaction Meter Value | None | Dynapac Caterpillar HAMM Volvo | |
| Compaction Control Value | None | Sakai | |
| Stiffness | None | ] | Ammann-Case |
| Vibration Modulus | None | BOMAG |
| Measurement Method | Example | Graph | ||
|---|---|---|---|---|
| Bearing Coefficient |  | |||
| (C = 300) |  | |||
| Soil Type | Compaction Meter Value |
|---|---|
| Rock fill | 60~100 |
| Gravel | 30~80 |
| Sand | 20~50 |
| Clay and Silt | 5~30 |
| Type | Pavement of Cement Concrete | Pavement of Asphalt Concrete | |
|---|---|---|---|
| Settlement (cm) | 0.125 | 0.25 | |
| Bearing coefficients | Embankment | 10 or more | 15 or more |
| On ground | 15 or more | 20 or more | |
| Auxiliary substratum, backfilling | 20 or more | 30 or more | |
| Compaction Spot | Contaminated Soil Replacement Site | Event Stadium Construction | ||||||
|---|---|---|---|---|---|---|---|---|
| Interval of Test (s) | Load | Settlement | Bearing Coefficient | Interval of Test (s) | Load | Settlement | Bearing Coefficient | |
| Load Strength | Displacement Meter Reading (cm) | Load Strength | Displacement Meter Reading (cm) | |||||
| 1 | 1 | 1.22 | 0.25 | 4.89 | 1 | 1.88 | 0.25 | 7.53 |
| 10 | 0.98 | 0.25 | 3.91 | 10 | 1.80 | 0.25 | 7.20 | |
| 20 | 1.33 | 0.25 | 5.33 | 20 | 2.05 | 0.25 | 8.21 | |
| 2 | 1 | 1.94 | 0.25 | 7.75 | 2 | 3.45 | 0.25 | 13.79 |
| 9 | 1.91 | 0.25 | 7.65 | 9 | 3.17 | 0.25 | 12.69 | |
| 19 | 2.00 | 0.25 | 8.01 | 19 | 3.51 | 0.25 | 14.02 | |
| 3 | 2 | 2.09 | 0.25 | 8.36 | 3 | 3.99 | 0.25 | 15.95 |
| 10 | 2.32 | 0.25 | 9.30 | 10 | 4.07 | 0.25 | 16.30 | |
| 18 | 2.09 | 0.25 | 8.35 | 18 | 3.82 | 0.25 | 15.29 | |
| 4 | 3 | 1.53 | 0.25 | 6.12 | 2 | 4.35 | 0.25 | 17.39 |
| 8 | 1.84 | 0.25 | 7.35 | 8 | 4.24 | 0.25 | 16.96 | |
| 20 | 1.93 | 0.25 | 7.73 | 20 | 3.98 | 0.25 | 15.93 | |
| 5 | 1 | 1.84 | 0.25 | 7.34 | 1 | 4.46 | 0.25 | 17.84 |
| 9 | 2.11 | 0.25 | 8.44 | 9 | 4.34 | 0.25 | 17.37 | |
| 19 | 1.85 | 0.25 | 7.40 | 19 | 4.08 | 0.25 | 16.33 | |
| 6 | 2 | 2.55 | 0.25 | 10.20 | 3 | 4.50 | 0.25 | 17.99 |
| 10 | 2.79 | 0.25 | 11.17 | 10 | 4.60 | 0.25 | 18.40 | |
| 18 | 2.84 | 0.25 | 11.37 | 18 | 4.49 | 0.25 | 17.94 | |
| 7 | 1 | 2.65 | 0.25 | 10.61 | 1 | 4.80 | 0.25 | 19.20 |
| 8 | 2.85 | 0.25 | 11.42 | 8 | 4.96 | 0.25 | 19.86 | |
| 19 | 3.23 | 0.25 | 12.91 | 19 | 5.04 | 0.25 | 20.18 | |
| 8 | 2 | 3.21 | 0.25 | 12.83 | 2 | 5.05 | 0.25 | 20.19 |
| 9 | 3.09 | 0.25 | 12.35 | 9 | 5.61 | 0.25 | 22.43 | |
| 20 | 3.09 | 0.25 | 12.34 | 20 | 5.10 | 0.25 | 20.39 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, S.; Sharafat, A.; Kim, I.S.; Seo, J. Development and Assessment of an Intelligent Compaction System for Compaction Quality Monitoring, Assurance, and Management. Appl. Sci. 2022, 12, 6855. https://doi.org/10.3390/app12146855
Lee S, Sharafat A, Kim IS, Seo J. Development and Assessment of an Intelligent Compaction System for Compaction Quality Monitoring, Assurance, and Management. Applied Sciences. 2022; 12(14):6855. https://doi.org/10.3390/app12146855
Chicago/Turabian StyleLee, Soomin, Abubakar Sharafat, In Sup Kim, and Jongwon Seo. 2022. "Development and Assessment of an Intelligent Compaction System for Compaction Quality Monitoring, Assurance, and Management" Applied Sciences 12, no. 14: 6855. https://doi.org/10.3390/app12146855
APA StyleLee, S., Sharafat, A., Kim, I. S., & Seo, J. (2022). Development and Assessment of an Intelligent Compaction System for Compaction Quality Monitoring, Assurance, and Management. Applied Sciences, 12(14), 6855. https://doi.org/10.3390/app12146855