
Influential Factors and Determination Method of Unconventional Outside Left-Turn Lanes Based on a BP Neural Network

Abstract
:1. Introduction
1.1. Background
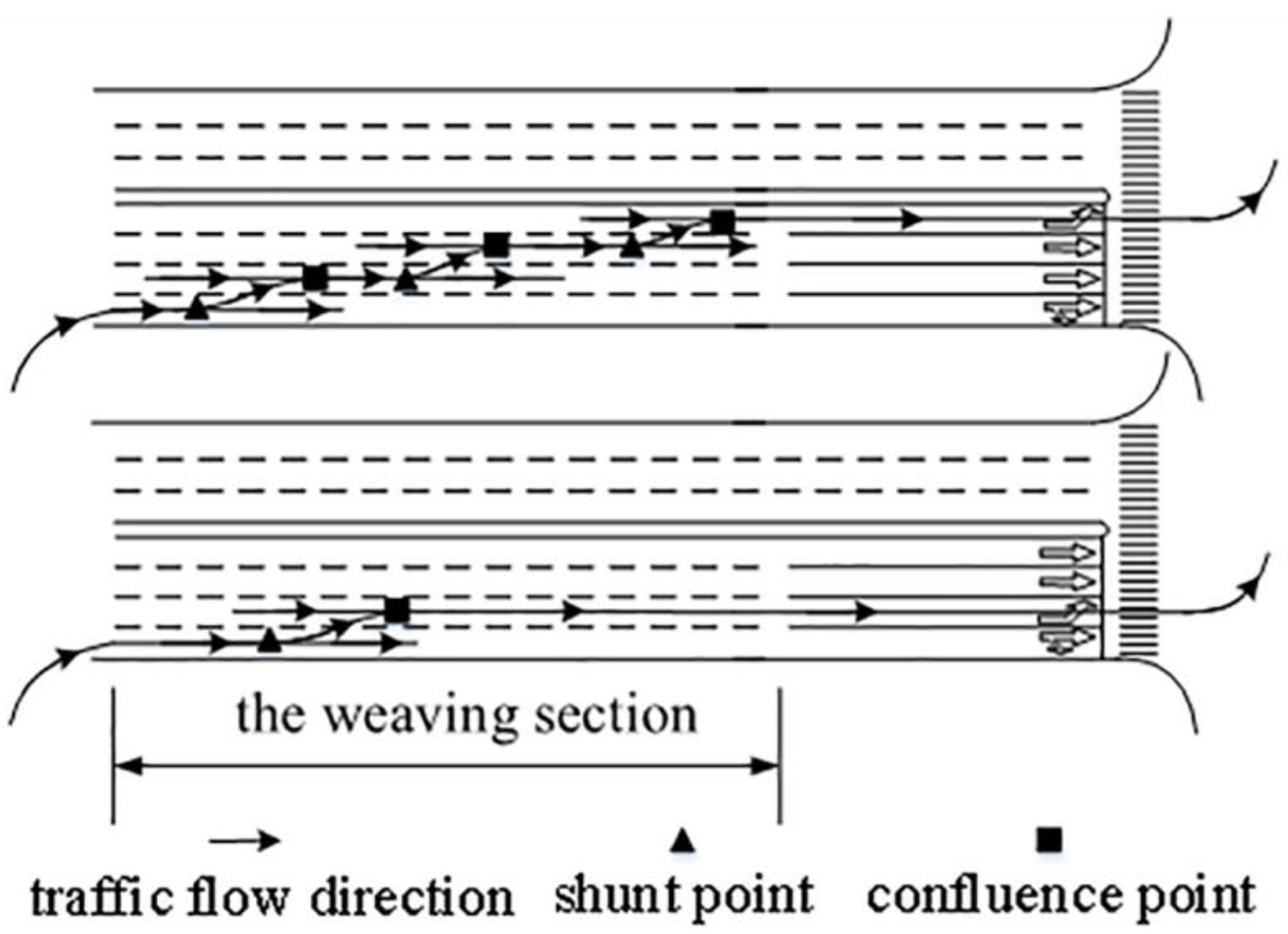
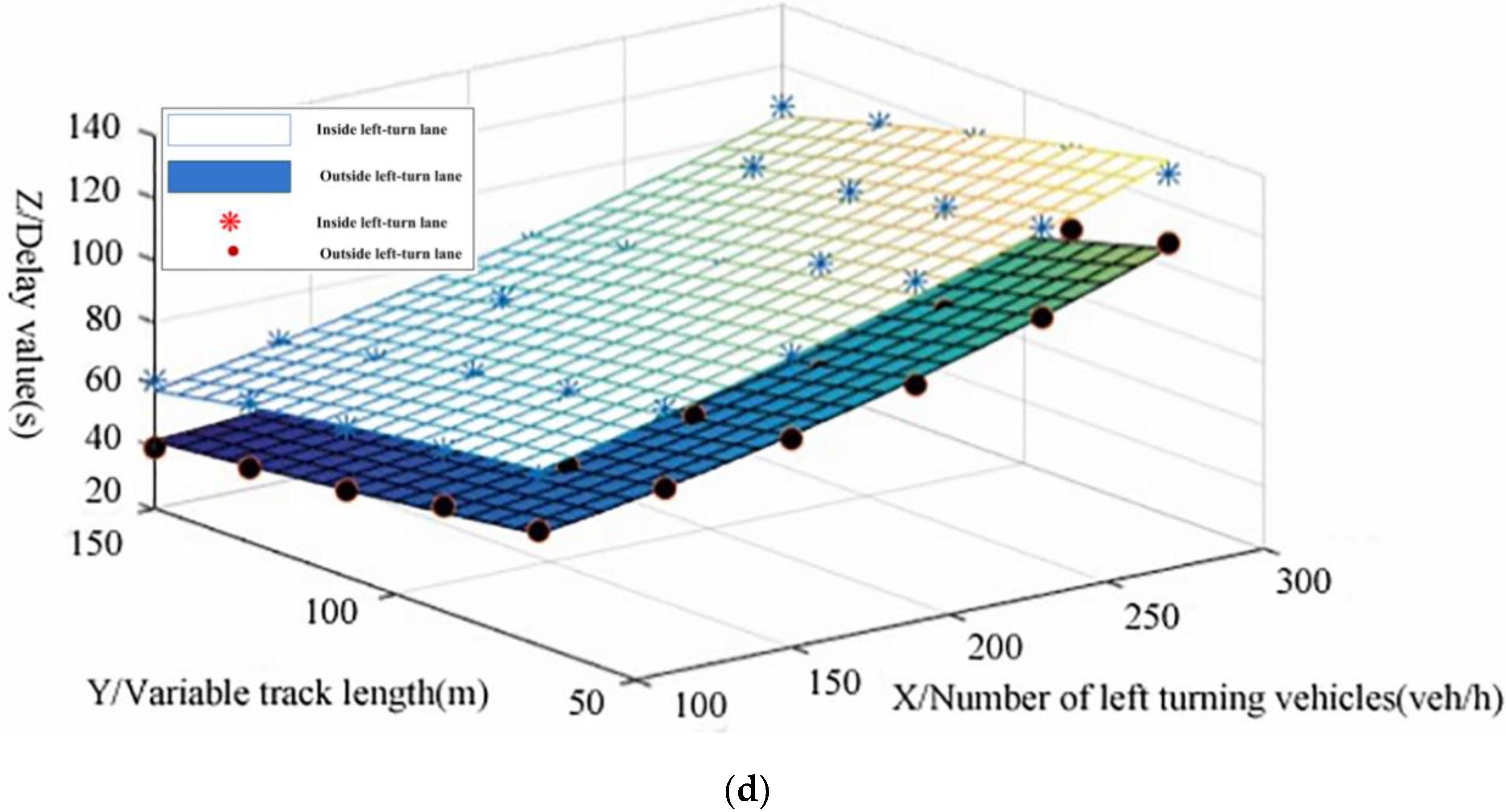
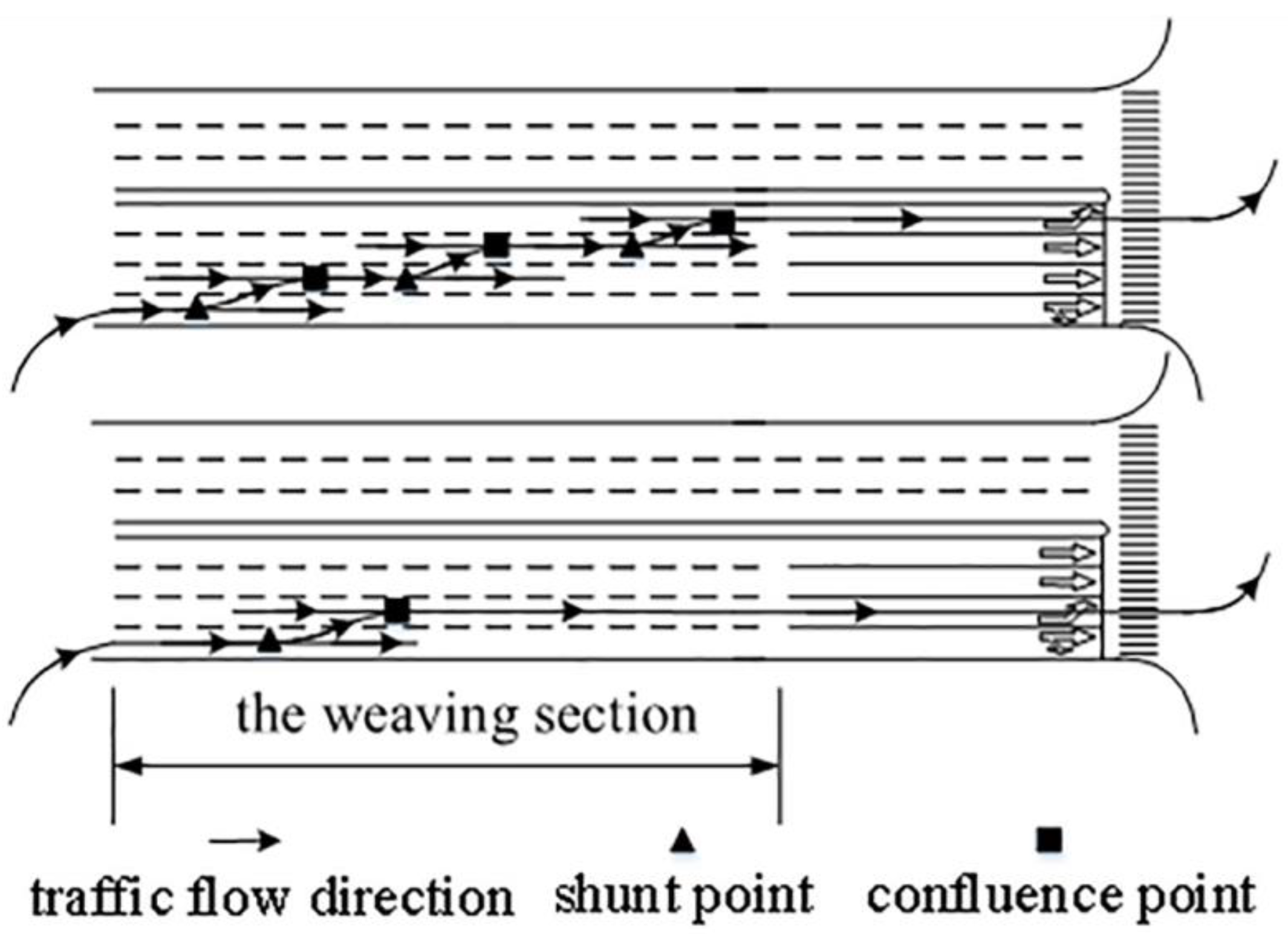
- Qualitative analysis was made on the influencing factors of the setting of external left-turn lane in this paper. Factors such as traffic flow, left-turn traffic flow, weaving section length, and the number of through lanes are considered, and a thorough analysis was made about their impact on the delay of external entrance lane in the left-turn lane. To some extent, the findings in this paper fill the gap of the lack of comprehensive consideration of multiple factors in previously published literature.
- Comparisons are made between the simulated delay value and the predicted delay value, which is the feasibility of BP neural network prediction. Such an attempt, to some degree, makes up for the prediction research of solving traffic delays based on a BP neural network.
1.2. Literature Review
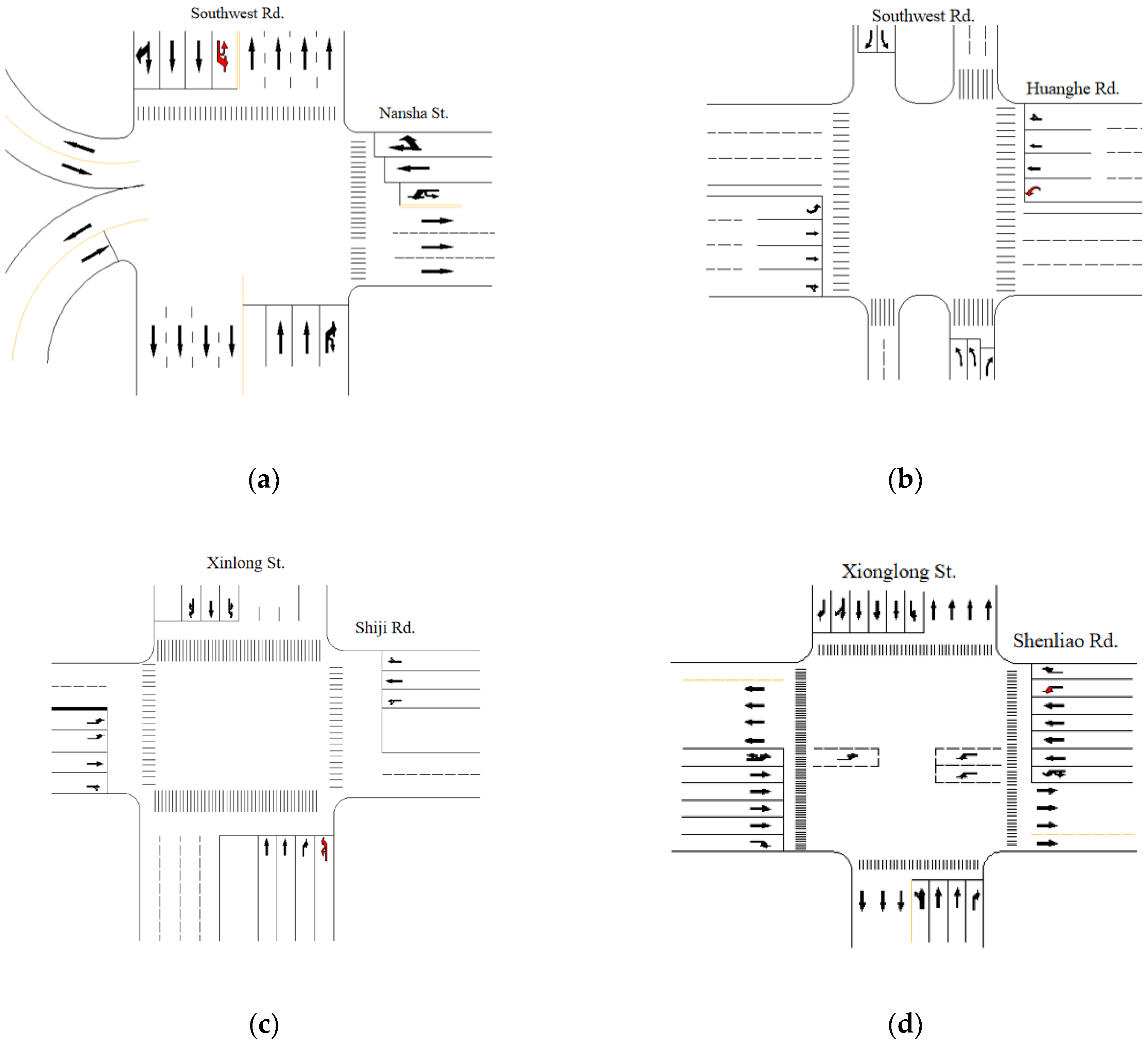
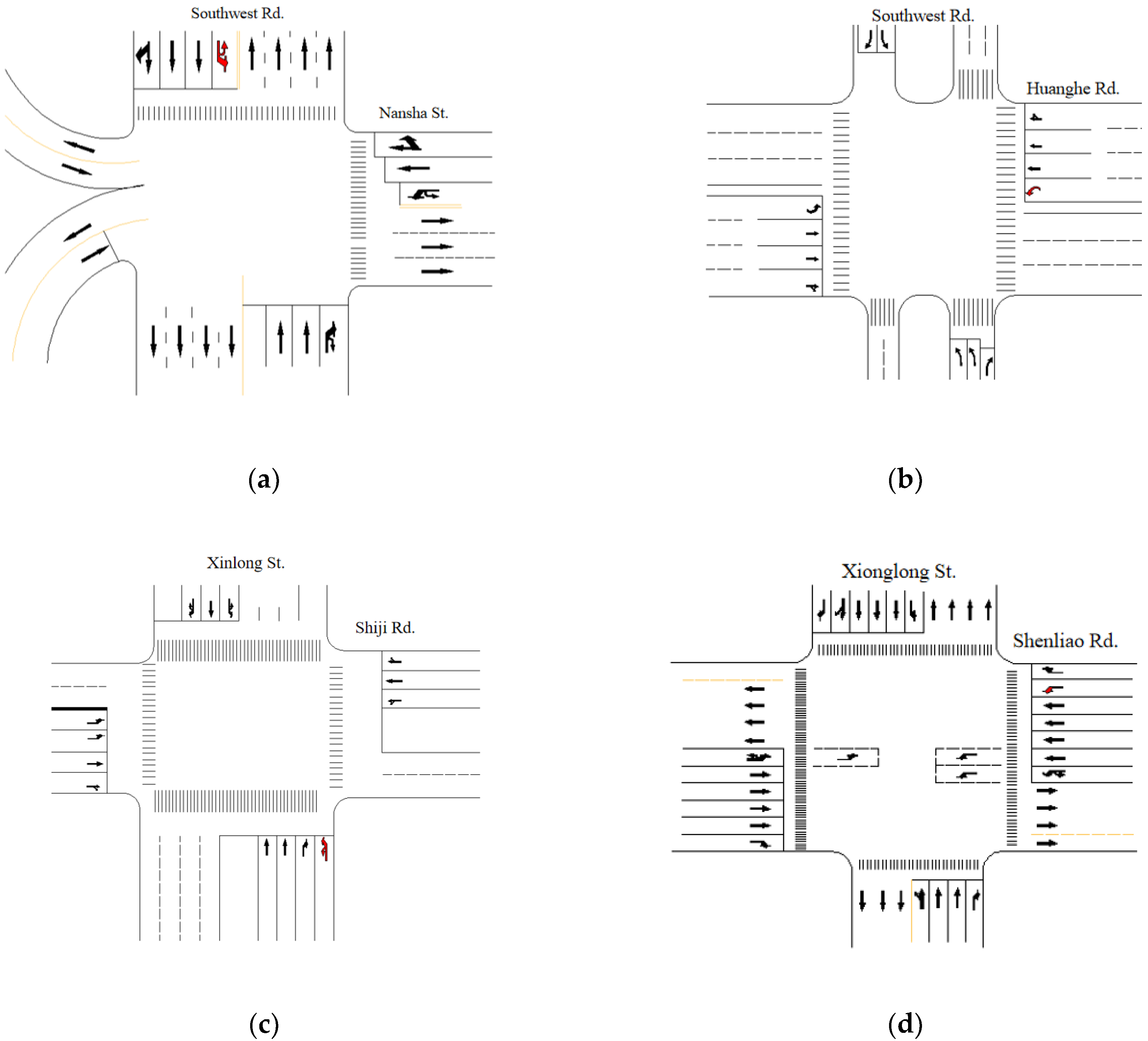
2. Case Study
Traffic Survey Data
3. Methodology
3.1. Analysis and of Influential Relationship
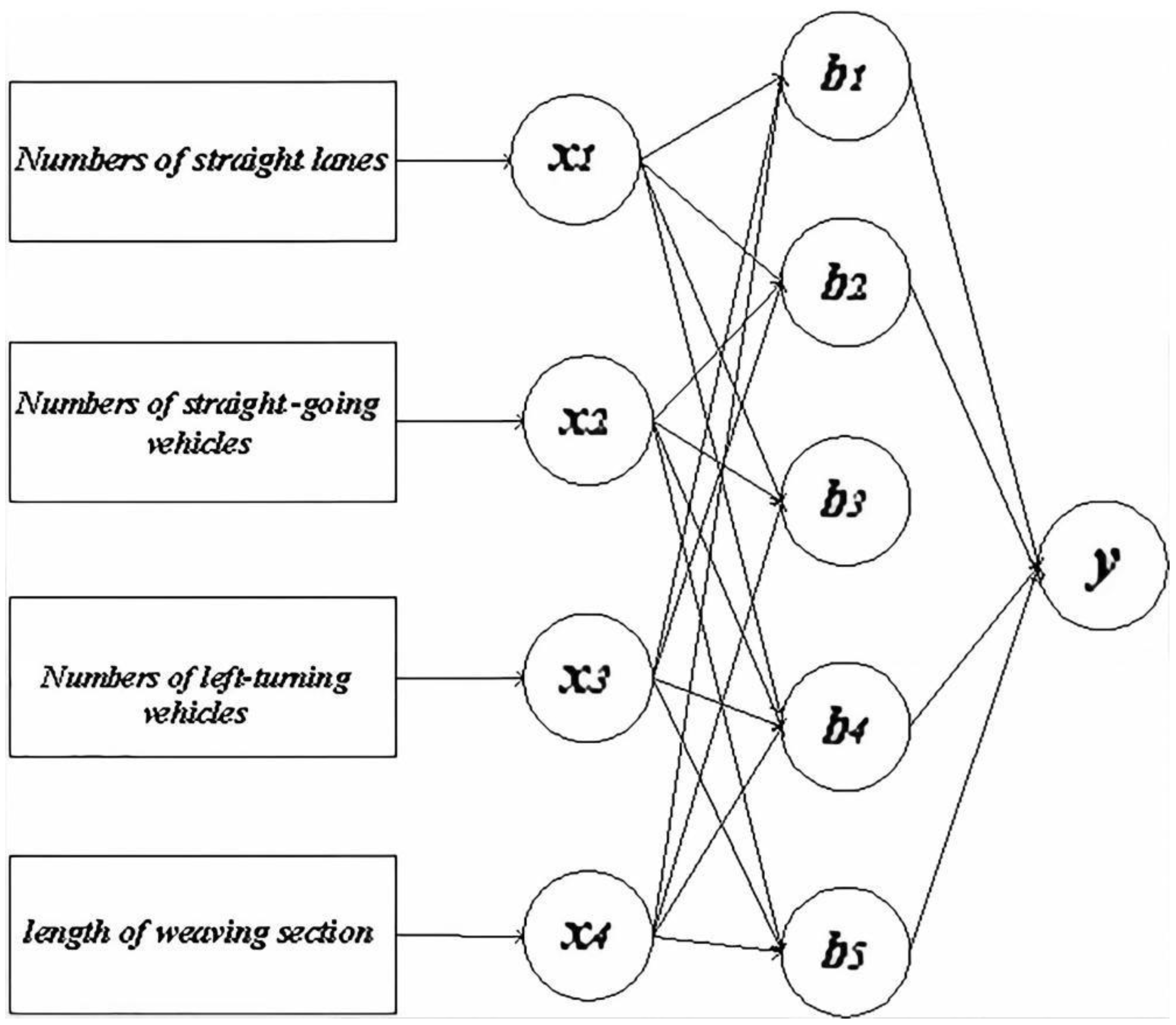
3.2. BP Neural Network Delay Model
3.2.1. Data Normalization
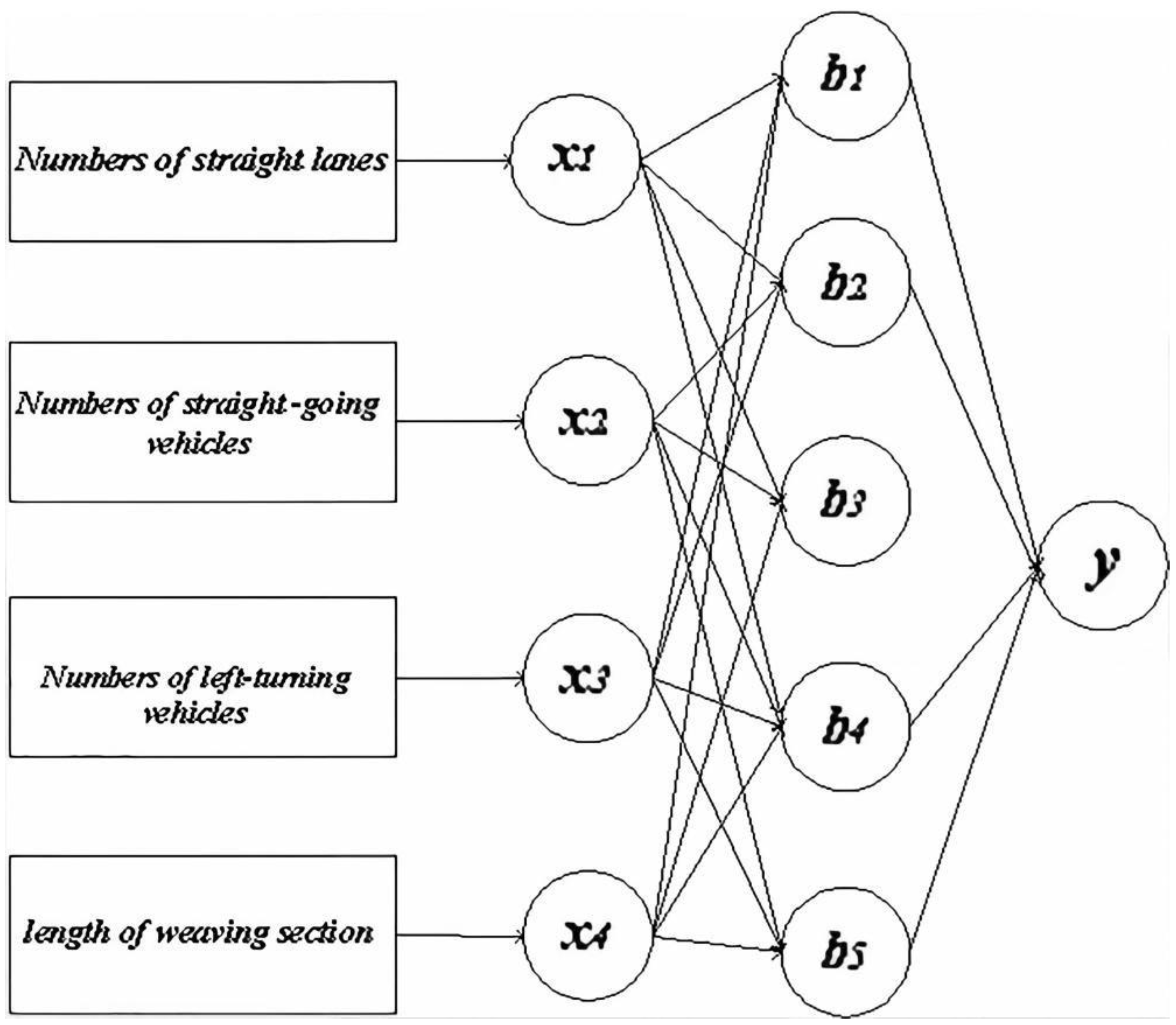
3.2.2. Network Structure Construction
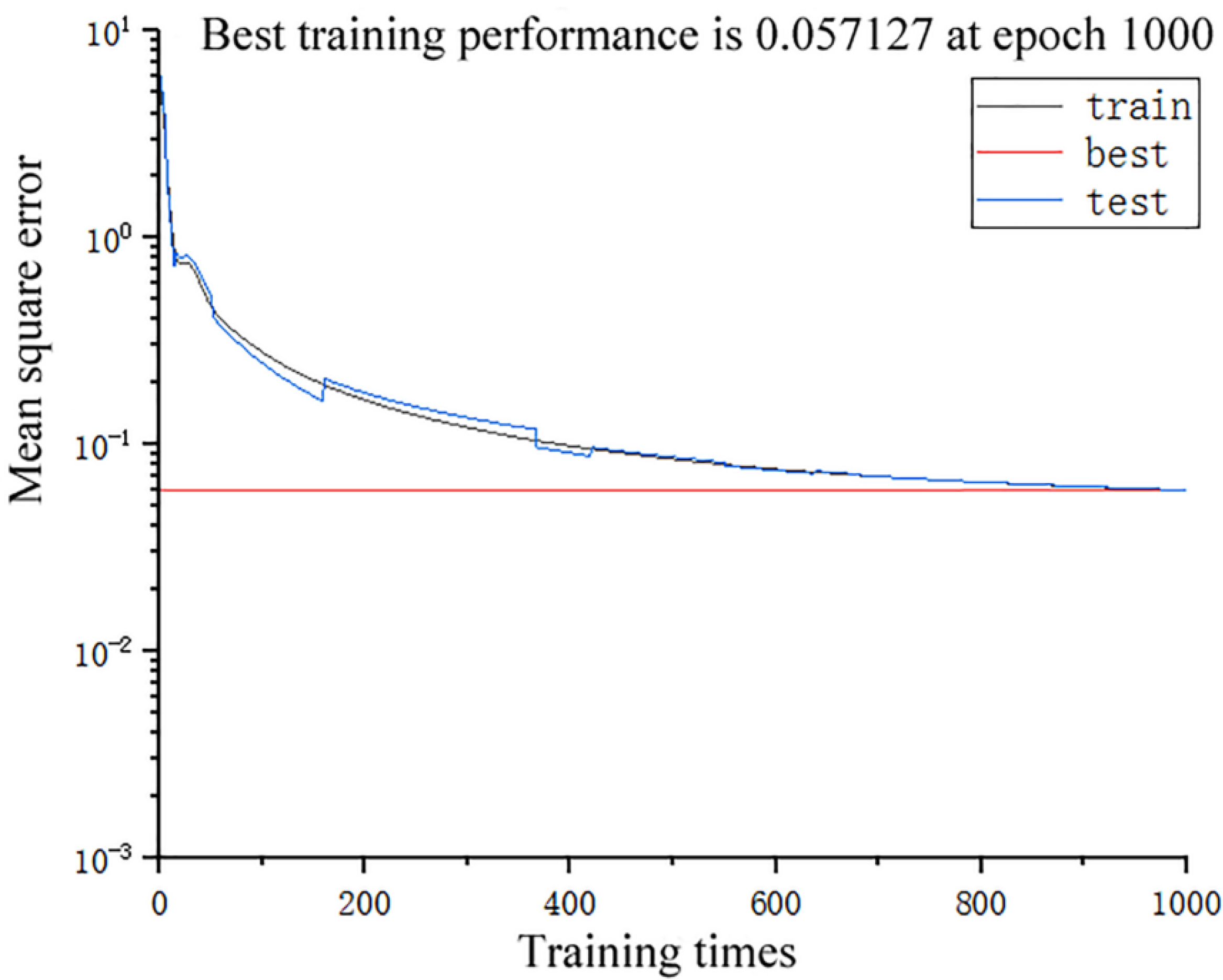
3.2.3. Network Training
4. Simulation Experiment
4.1. Influential Factor
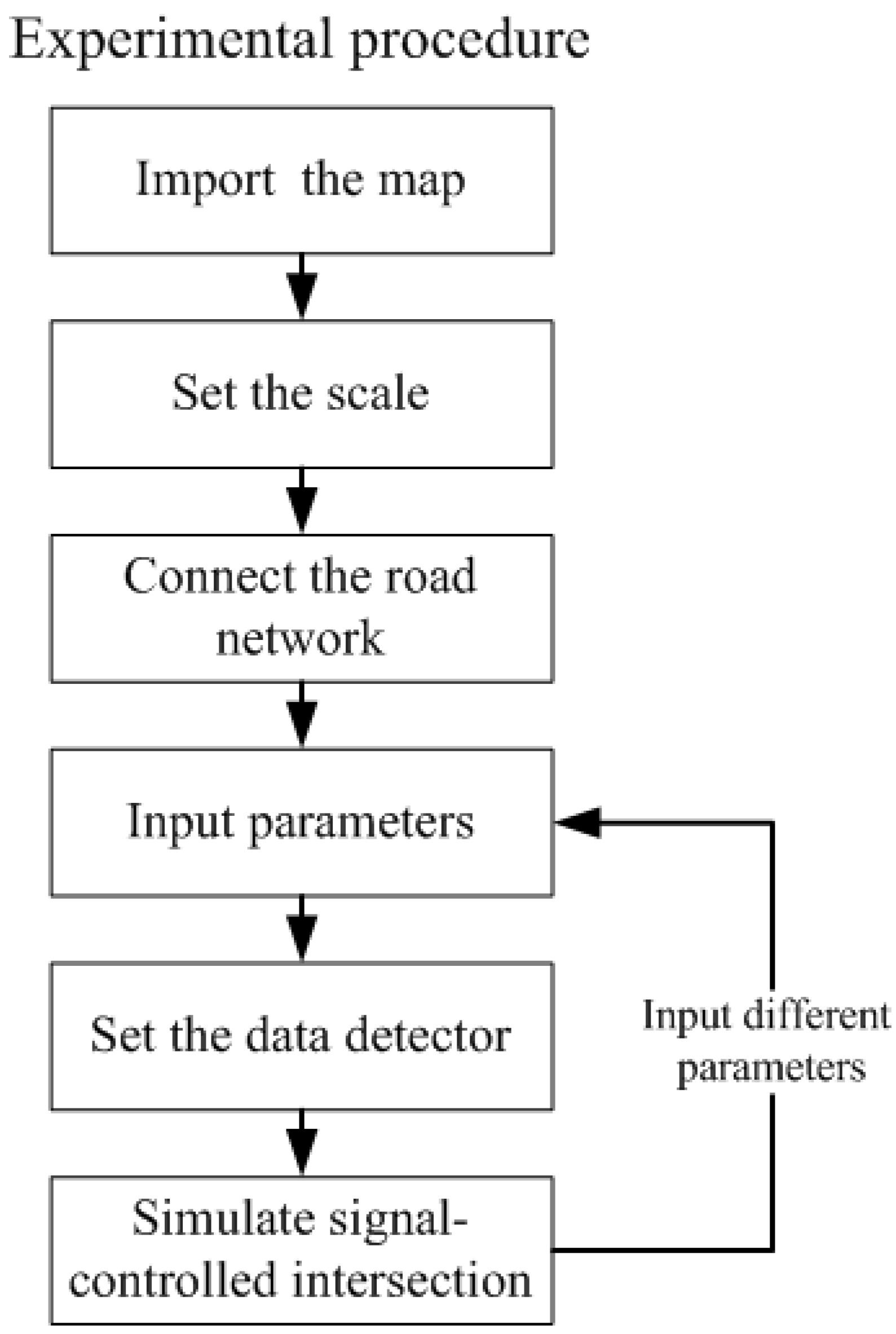
4.2. Experimental Scheme
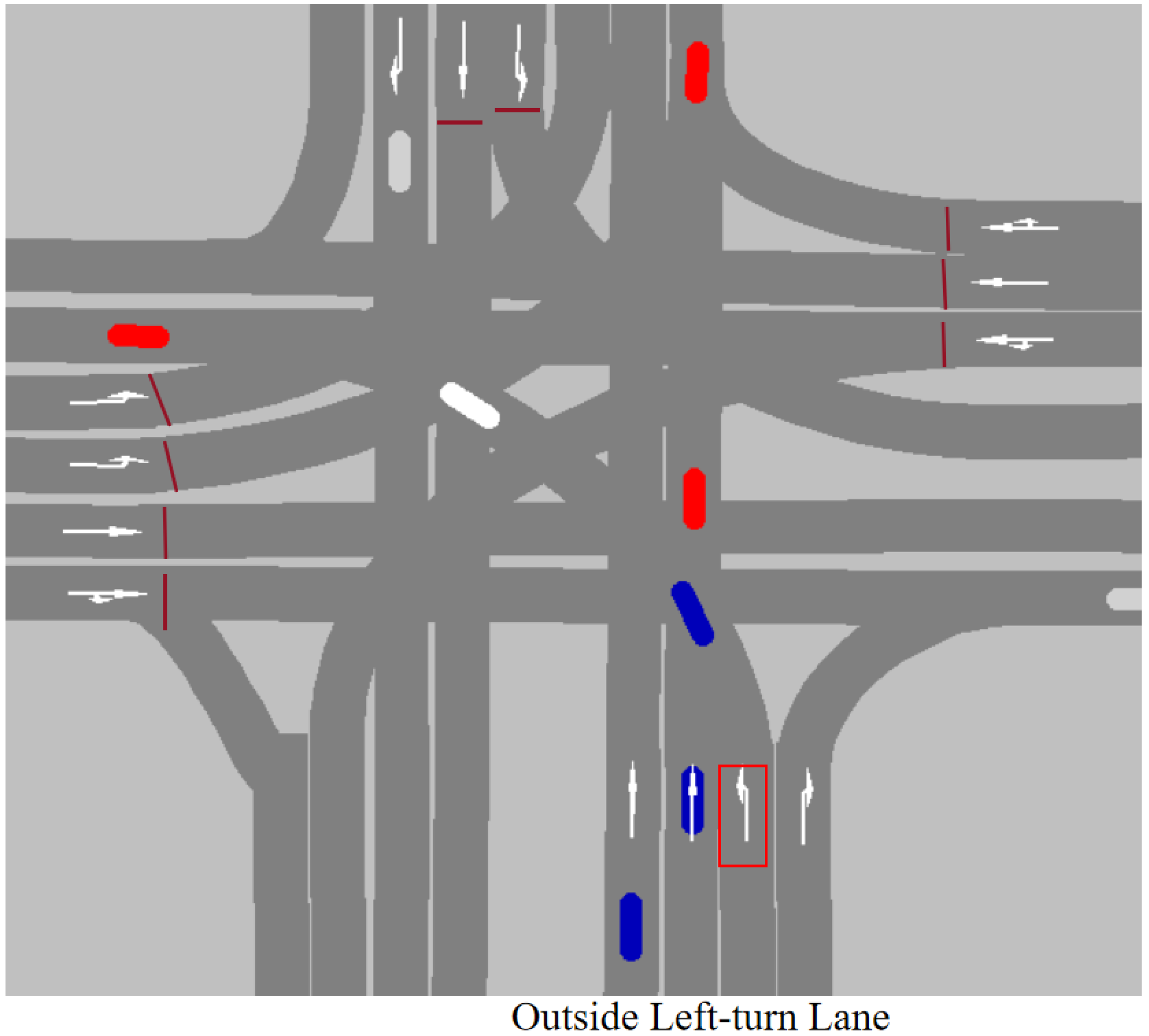
- Import the base map into VISSIM and set the correct scale;
- Set the road sections according to the direction of actual traffic, and then connect the entry and exit routes by connectors in accordance with the way that vehicles pass in real life;
- Input the survey data into the system of VISSIM traffic to calibrate parameters, including traffic volume, traffic composition, path decision setting, signal timing scheme, and traffic signal lights;
- Set the data detector and then select result output items, such as delay time, journey time, and traffic data in the system of VISSIM.
4.3. Parameter Calibration
- a.
- Routing Decision
- b.
- Traffic Compositions
- c.
- Desired Speed
4.4. Experiment Conditions
5. Results
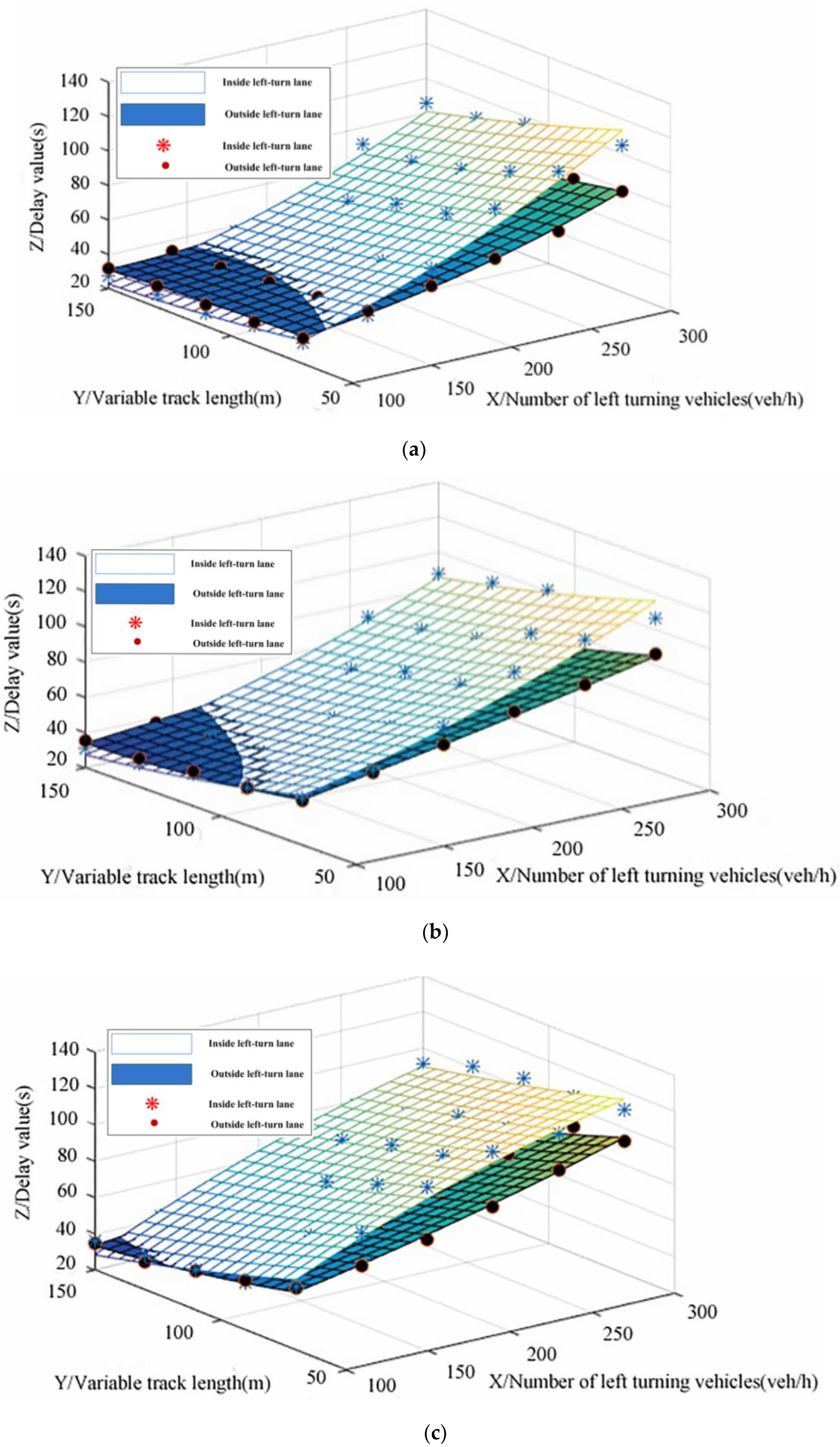
5.1. BP Neural Network Prediction Results
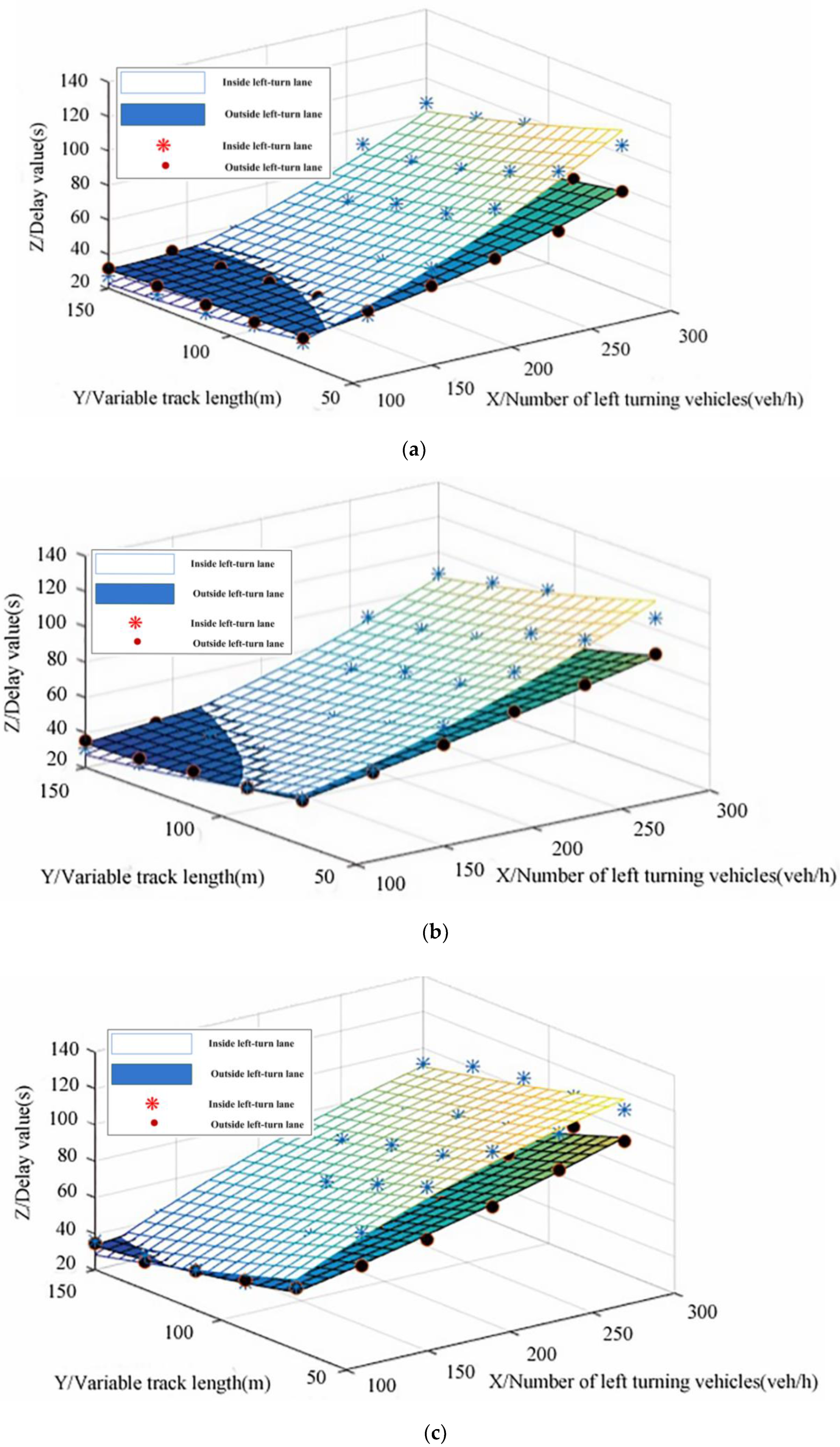
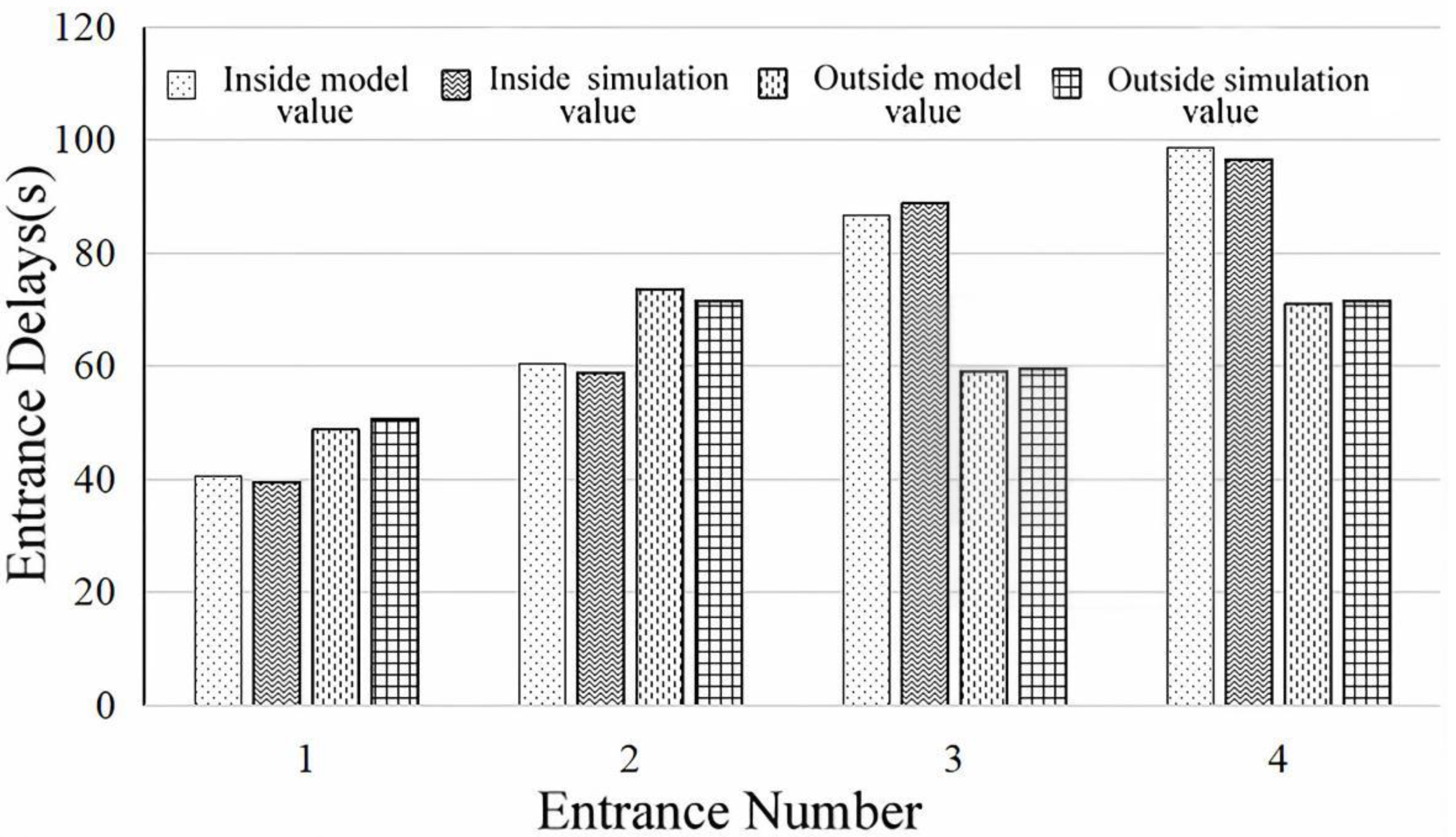
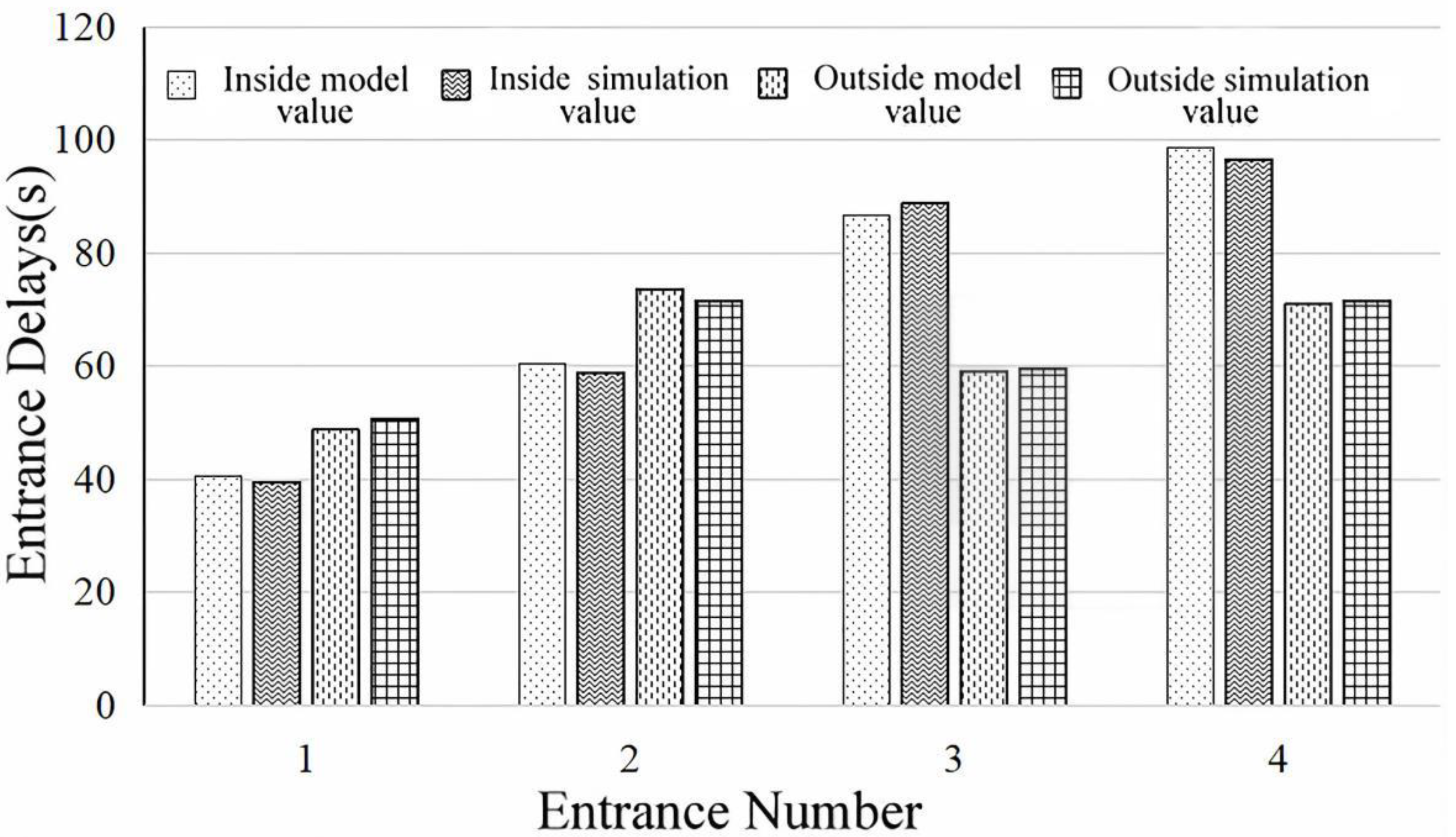
5.2. Simulation Verification with VISSIM
6. Discussion
7. Conclusions
- (1)
- From the perspective of delay, the outside left-turn lane is suitable for the following situation: more left-turn vehicles in the outside lane, more straight-going vehicles on the section, a shorter length of upstream weaving section, and more straight-going lanes at the intersection entrance.
- (2)
- According to the number of lanes, straight-going vehicles, left-turn vehicles, and the length of the weaving section, the delay model of the BP neural network can be used to calculate the traffic delay corresponding to the scheme of inside or outside left-turn lanes, respectively, and the analysis results of the model are in good agreement with the simulation results. The appropriate location of the left-turn lane can be determined through delay comparison.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Li, J.W.; Chen, S.F.; Huang, H. Short-term Traffic Flow Prediction of Road Network Based on Rough Set Theory and Support Vector Machine. Appl. Res. Comput. 2010, 27, 3683–3685. [Google Scholar] [CrossRef]
- Guo, Y.; Sayed, T.; Zaki, M.H.; Liu, P. Safety evaluation of unconventional outside left-turn lane using automated traffic conflict techniques. Can. J. Civ. Eng. 2016, 43, 631–642. [Google Scholar] [CrossRef] [Green Version]
- Ma, W.J.; Liu, Y.; Liu, H.D. Impact of Short Left-turn Lane on Maximum Throughput of Signalized Intersection. Zhongguo Gonglu Xuebao/China J. Highw. Transp. 2017, 30, 268–278. [Google Scholar]
- Sando, T.; Moses, R. Influence of intersection geometrics on the operation of triple left-turn lanes. J. Transp. Eng. 2009, 135, 253–259. [Google Scholar] [CrossRef]
- Kikuchi, S.; Kronprasert, N. Determining lengths of left-turn lanes at signalized intersections under different left-turn signal schemes. Transp. Res. Rec. 2021, 95, 70–81. [Google Scholar] [CrossRef]
- Persaud, B.; Lyon, C.; Gross, F.; Eccles, K. Safety Evaluation of Offset Improvements for Left-Turn Lanes. Transp. Res. Rec. J. Transp. Res. Board 2010, 2171, 44–51. [Google Scholar] [CrossRef] [Green Version]
- Wan, X.; Jin, P.J.; Fellow, P. Modeling Vehicle Interactions during Freeway Ramp Merging in Congested Weaving Section; University of Wisconsin-Madison: Madison, WI, USA, 2019. [Google Scholar]
- Daamen, W.; Hoogendoorn, S.P.; Loot, M. Empirical Analysis of Merging Behavior at Freeway On-Ramp. Transp. Res. Rec. J. Transp. Res. Board 2010, 2188, 108–118. [Google Scholar] [CrossRef]
- Xu, Y.; Chen, J.Y.; Luo, D.Y. Study on Minimum Length of Interlacing Segment Based on Density Index. J. Transp. Syst. Eng. Inf. Technol. 2018, 18, 53–58. [Google Scholar] [CrossRef]
- Han, Y.; Han, Y.; Hu, R. Optimization Design of Intersection Traffic Organization Based on VISSIM Simulation. Logist. Sci. Technol. 2021, 9, 83–86. [Google Scholar] [CrossRef]
- Yao, R.H.; Wang, D.H. A model of equivalent queue length change rate for congested traffic flow. J. Transp. Eng. 2009, 9, 93–99. [Google Scholar] [CrossRef]
- Fitzpatrick, K.; Park, E.S.; Kuo, P.F.; Robertson, J.; Brewer, M.A. Effects of Geometrie and Traffic Variables on Double Left-turn Lane Operations. Transp. Res. Rec. 2014, 2436, 32–42. [Google Scholar] [CrossRef]
- Wu, J.; Liu, P.; Qin, X.; Zhou, H.; Yang, Z. Developing an actuated signal control strategy to improve the operations of contra flow left-turn lane design at signalized intersections. Transp. Res. Part C Emerg. Technol. 2019, 104, 53–65. [Google Scholar] [CrossRef]
- Zhou, H.; Ivan, J.N.; Sadek, A.W.; Ravishanker, N. Safety Effects of Exclusive Left-Turn Lanes at Unsignalized Intersections and Driveways. J. Transp. Saf. Secur. 2010, 2, 221–238. [Google Scholar] [CrossRef]
- Zheng, C.J.; Lin, D.G.; Zheng, S.K.; Chen, S.Y. Research on Traffic Delay Predicting at Signalized Intersection Based on Neural Network. Appl. Mech. Mater. 2013, 427–429, 901–904. [Google Scholar] [CrossRef]
- Liu, P.; Wan, J.J.; Wang, W. Evaluating the Impacts of Unconventional Outside Left-turn Lane Design on Traffic Operations at Signalized Intersections. Traffic Res. Rec. 2013, 7, 22–25. [Google Scholar] [CrossRef]
- Liu, P.; Xu, C.C.; Wang, W.L. Identifying Factors Affecting Drivers’ Selection of Unconventional Outside Left-turn Lanes at Signallised Intersections. IET Intell. Transp. Syst. 2013, 7, 396–403. [Google Scholar] [CrossRef]
- Yao, R.; Zhang, W.; Zhang, L. Hybrid Methods for Short-Term Traffic Flow Prediction Based on ARIMA-GARCH Model and Wavelet Neural Network. J. Transp. Eng. Part A Syst. 2020, 146, 4020086. [Google Scholar] [CrossRef]
- Sun, H.; Yang, J.; Wang, L.; Li, L.; Wu, B. Saturation Flow Rate and Start-up Lost Time of Dual-left Lanes at Signalized Intersection in Rainy Weather Condition. Procedia Soc. Behav. Sci. 2013, 96, 270–279. [Google Scholar] [CrossRef] [Green Version]
- Junjie, C.; Binghong, P.; Zhenjiang, X.; Lin, Z. Simulation Analysis of Applicable Conditions of Two-Way Left-Turn Lane under the Condition of Multi Factor Combination. World Transp. Forum Eng. Technol. 2021, 1573–1584. [Google Scholar] [CrossRef]
- Hu, Z.A.; Zou, Z.F.; Bao, T.W. Traffic information prediction method based on BP neural network. J. Transp. Eng. Inf. 2018, 16, 81–87. [Google Scholar] [CrossRef]
- Likhachev, D.; Dorokhin, S.; Postavnichii, S. Development of an algorithm for choosing the specialization of the left-turn lane in the zone of a controlled intersection. In Proceedings of the MATEC Web of Conferences, Sibiu, Romania, 5–7 June 2019; Volume 298, p. 75. [Google Scholar]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Location | Longitude Coordinates | Latitude Coordinates | Date | Period | Investigator (Individual) |
|---|---|---|---|---|---|
| The intersection of Southwest Rd. and Nansha St. | 121.57147 | 38.914697 | 12 July 2019 13 July 2019 | 7:00–8:00 17:00–18:00 | 8 |
| The intersection of Southwest Rd. and Huanghe Rd. | 121.575113 | 38.920412 | 12 July 2019 13 July 2019 | 7:00–8:00 17:00–18:00 | 8 |
| The intersection of Xinlong St. and Shiji Rd. | 123.46434 | 41.724777 | 5 July 2019 6 July 2019 | 7:00–8:00 17:00–18:00 | 8 |
| The intersection of Xinggong St. and Shenliao Rd. | 123.38505 | 41.788174 | 5 July 2019 6 July 2019 | 7:00–8:00 17:00–18:00 | 8 |
| Number of Straight-Going Vehicles | Curve Projection Equation |
|---|---|
| 600 | |
| 750 | |
| 900 |
| Road Traffic Conditions | Lower Limit | Upper Limit | Steps | Number of Groups |
|---|---|---|---|---|
| Number of straight-going lanes | 2 | 3 | 1 | 2 |
| Length of weaving section/m | 70 | 150 | 20 | 5 |
| Number of left-turn vehicles/(veh/h) | 100 | 300 | 40 | 6 |
| Number of straight-going vehicles/(veh/h) | 600 | 1050 | 150 | 4 |
| Location of left-turn lane | inside | outside | - | 2 |
| Entrance Road Number | Number of Left-Turn Vehicles (veh/h) | Number of Straight-Going Vehicles (veh/h) | Location of Left-Turn Lane | Length of Weaving Section (m) | Number of Straight-Going Lanes | ||
|---|---|---|---|---|---|---|---|
| Car | Large Vehicles | Car | Large Vehicles | ||||
| 1 | 480 | 48 | 609 | 123 | inside | 160 | 2 |
| 2 | 235 | 24 | 1809 | 131 | inside | 93 | 2 |
| 3 | 153 | 19 | 845 | 13 | outside | 90 | 2 |
| 4 | 391 | 41 | 1346 | 97 | outside | 100 | 3 |
| Entrance Road Number | Inside Delay(s) | Outside Delay(s) | ||
|---|---|---|---|---|
| Model Value | Simulation Value | Model Value | Simulation Value | |
| 1 | 40.6 | 39.4 | 48.7 | 50.7 |
| 2 | 60.3 | 58.7 | 73.6 | 71.5 |
| 3 | 86.6 | 88.7 | 59.0 | 59.6 |
| 4 | 98.5 | 96.5 | 70.9 | 71.6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cao, Y.; Jiang, D.; Li, X. Influential Factors and Determination Method of Unconventional Outside Left-Turn Lanes Based on a BP Neural Network. Appl. Sci. 2022, 12, 6026. https://doi.org/10.3390/app12126026
Cao Y, Jiang D, Li X. Influential Factors and Determination Method of Unconventional Outside Left-Turn Lanes Based on a BP Neural Network. Applied Sciences. 2022; 12(12):6026. https://doi.org/10.3390/app12126026
Chicago/Turabian StyleCao, Yi, Dandan Jiang, and Xuetong Li. 2022. "Influential Factors and Determination Method of Unconventional Outside Left-Turn Lanes Based on a BP Neural Network" Applied Sciences 12, no. 12: 6026. https://doi.org/10.3390/app12126026
APA StyleCao, Y., Jiang, D., & Li, X. (2022). Influential Factors and Determination Method of Unconventional Outside Left-Turn Lanes Based on a BP Neural Network. Applied Sciences, 12(12), 6026. https://doi.org/10.3390/app12126026