
Improved Analytic Expansions in Hybrid A-Star Path Planning for Non-Holonomic Robots


Abstract
:1. Introduction
2. Statement of the Problem
2.1. Hybrid-State A-Star Algorithm
2.2. Our Path Planning Problem
3. An Improved Method
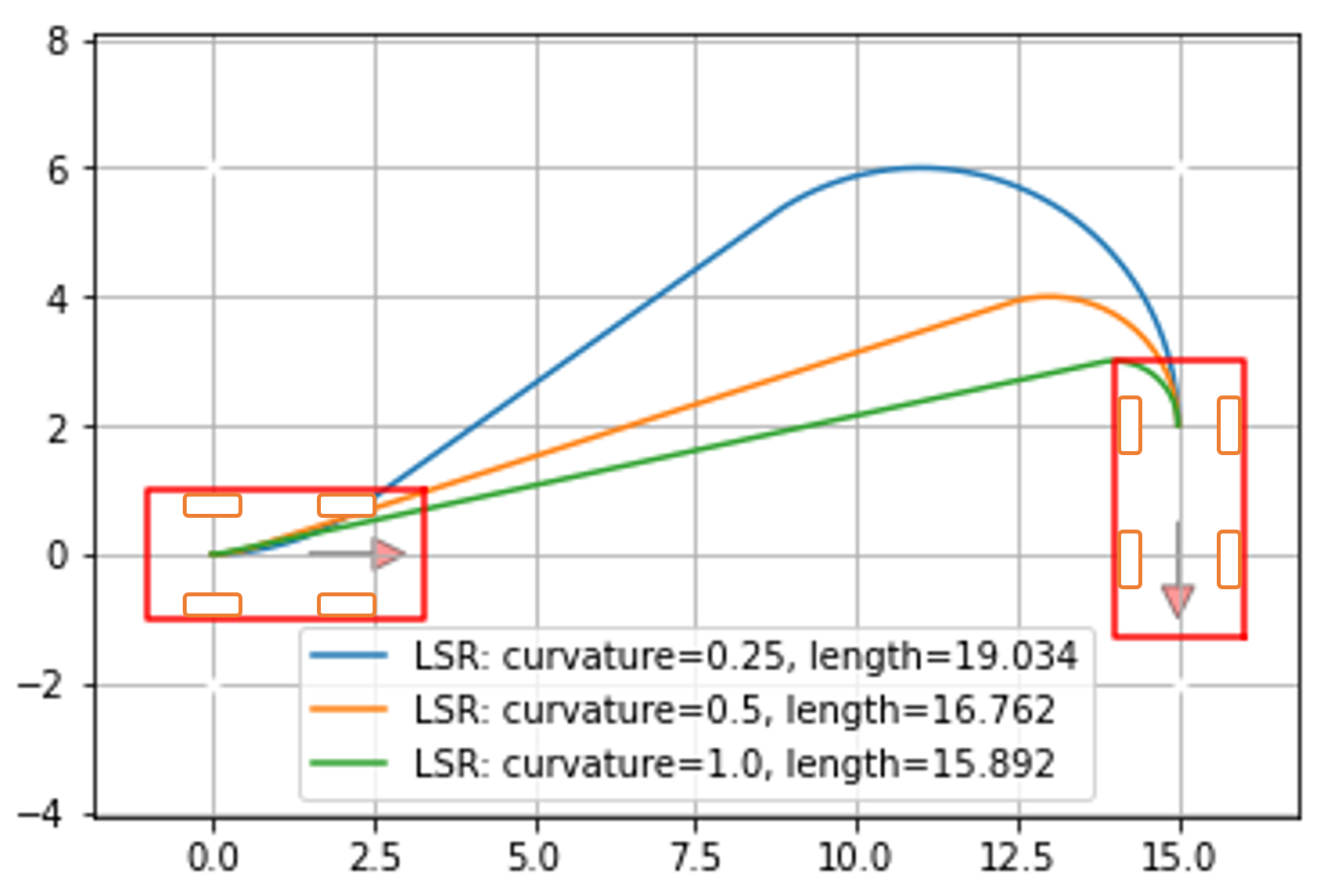
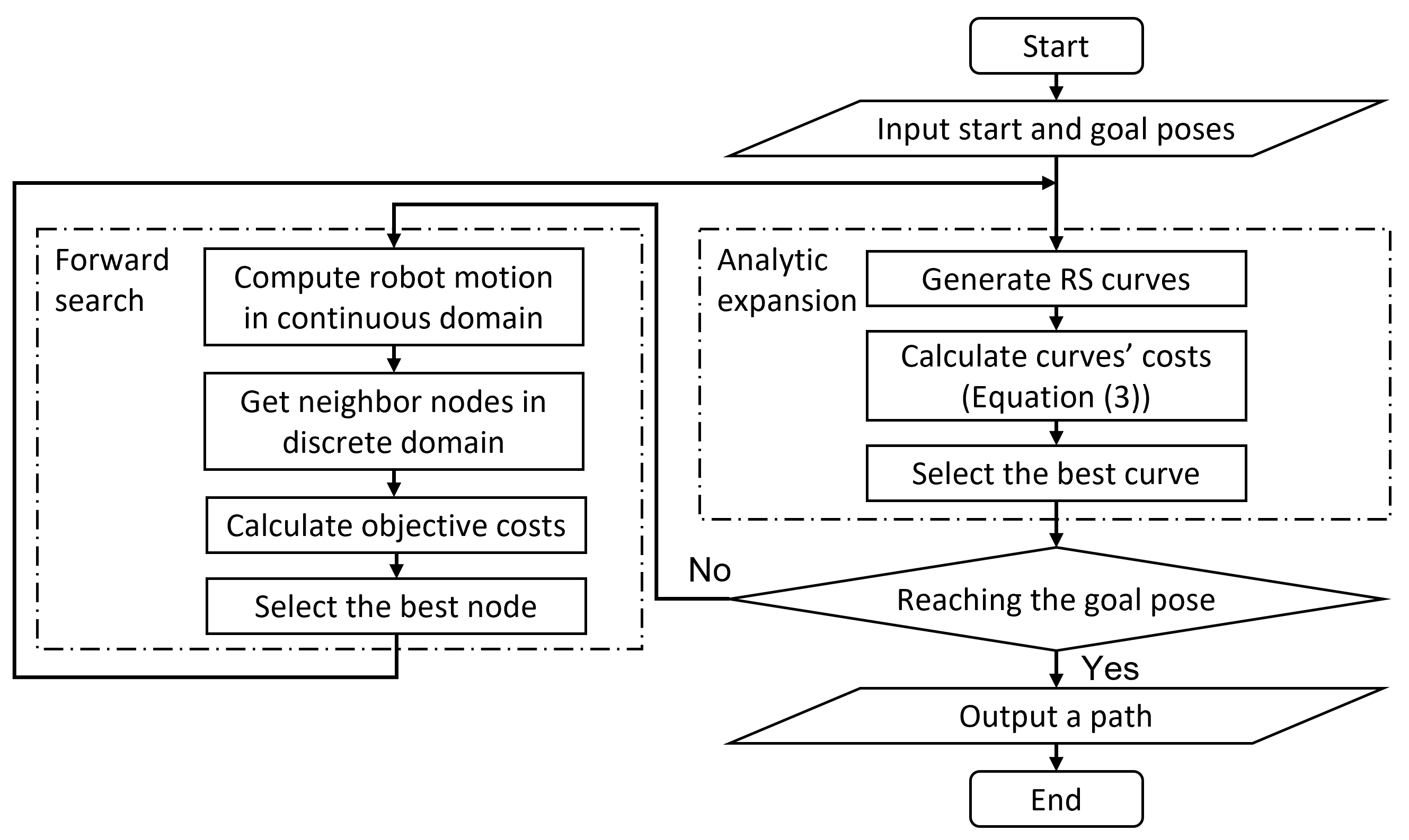
- First, RS curves are generated based on different curvature values from the input state to the goal state. Collision to obstacles is checked along the curves. Hence the curve which does not collide with obstacles is chosen.
- Second, the cost of each curve is calculated according to the Equation (3).
- Third, the curve which has the lowest cost is selected as the best curve. The robot is expected to travel more safely along this curve.
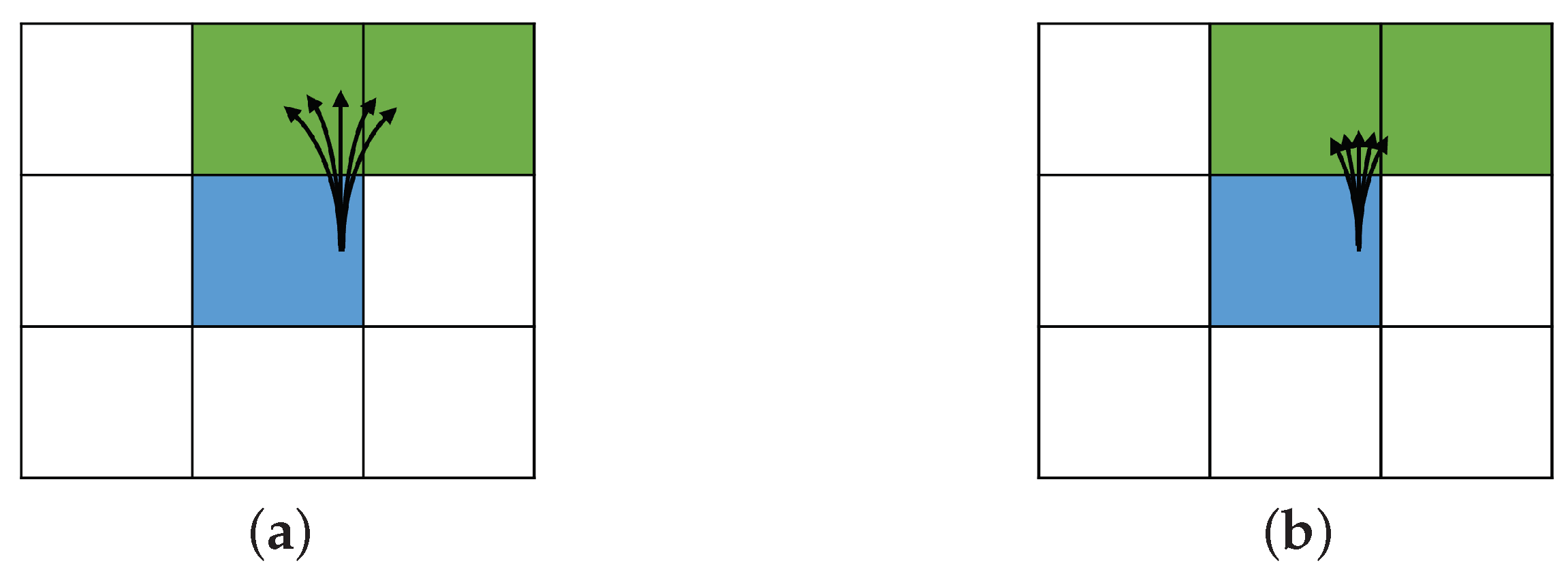
- Computes robot continuous coordinates based on a non-holonomic model,
- Converts these coordinates to corresponding discrete coordinates in the grid map,
- Calculates objective costs according to the Equation (1),
- Selects the best successor for the next search loop.
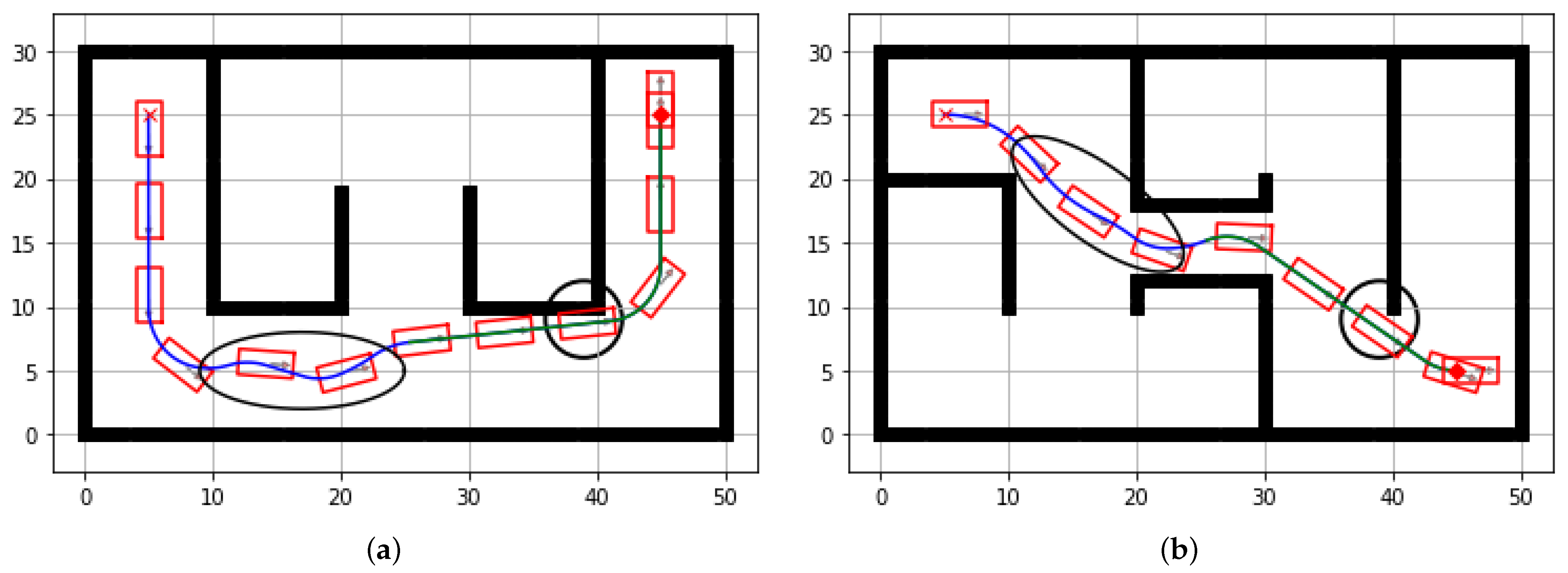
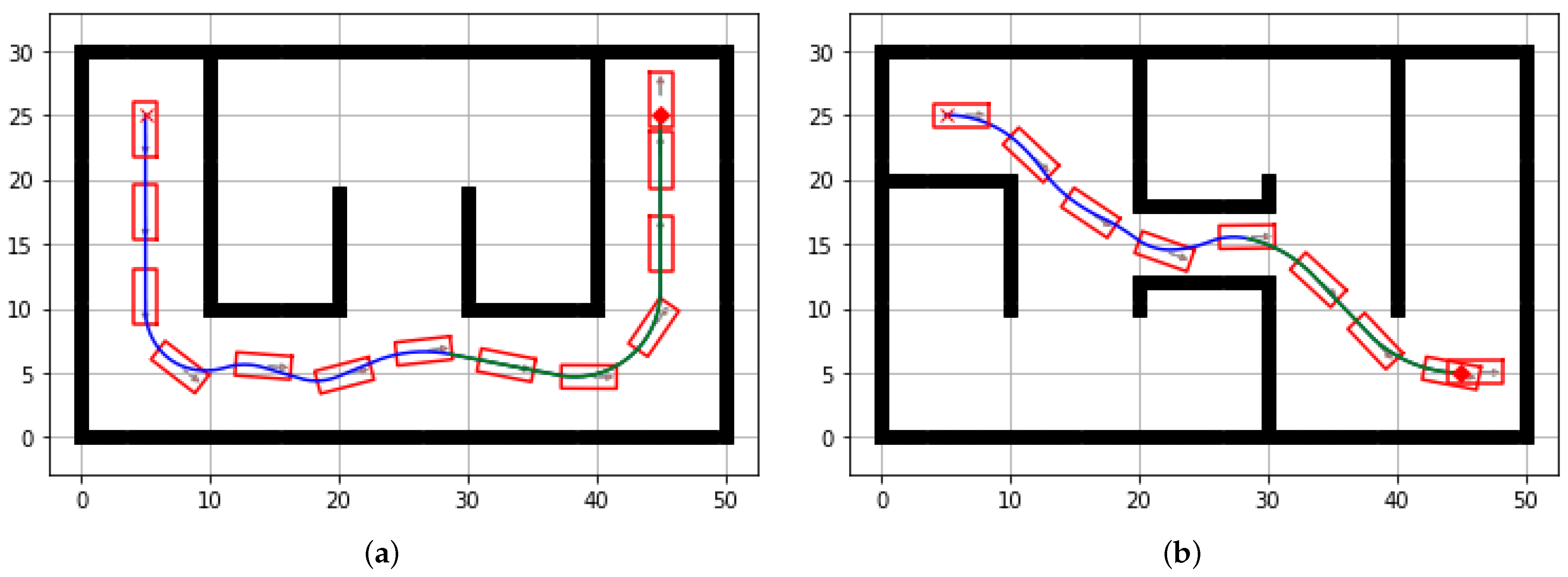
4. Experimental Simulation
4.1. Simulations
4.2. Fine Tunings
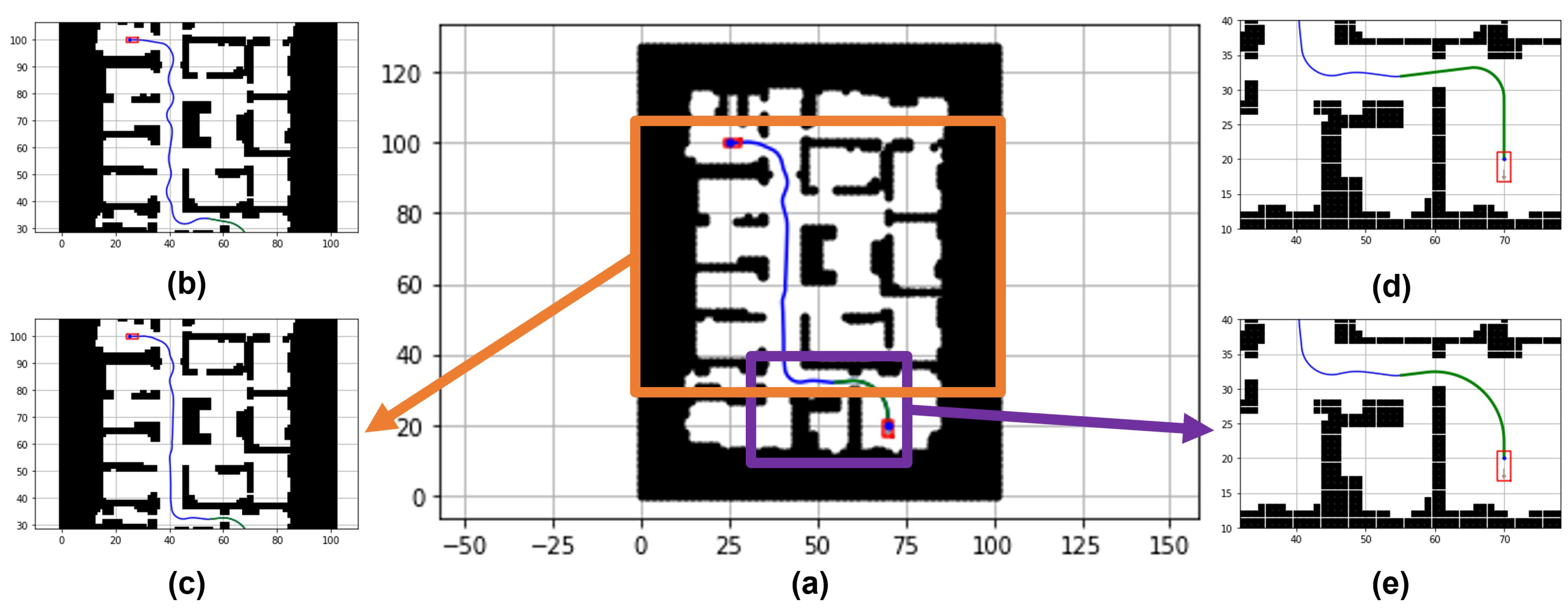
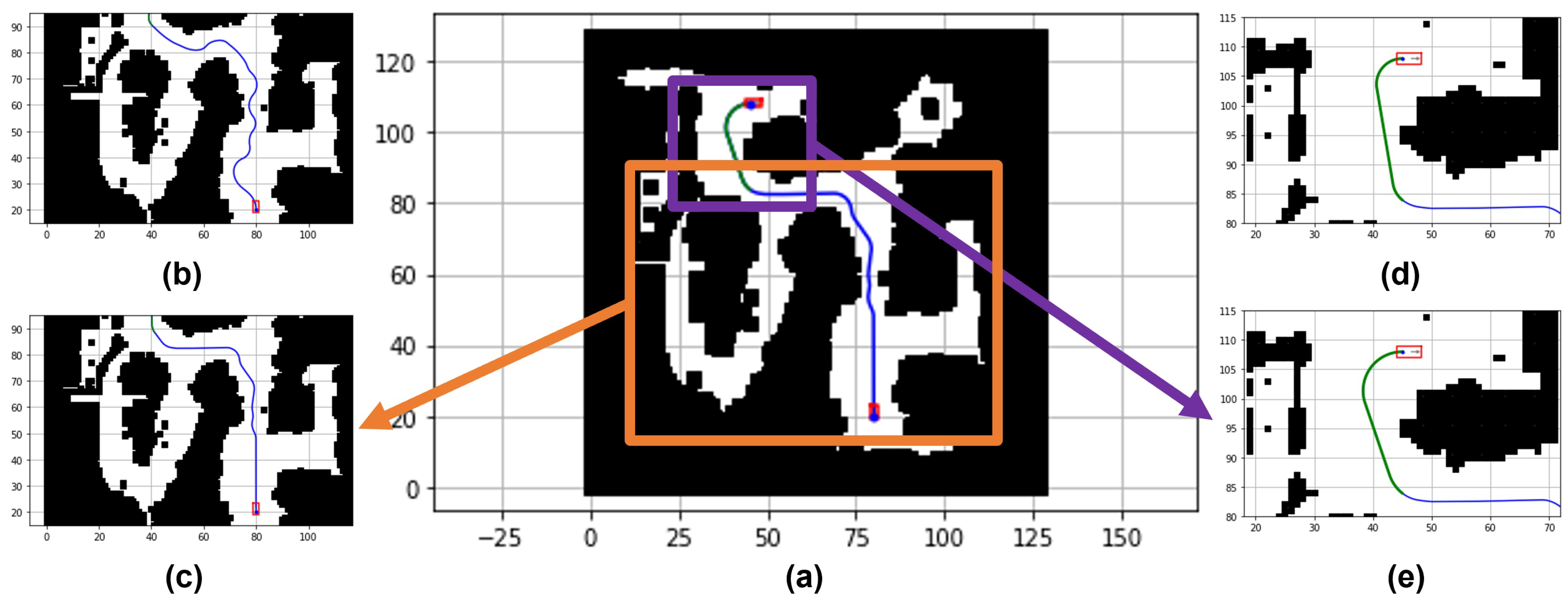
4.3. Experiments in Benchmark Maps
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tsardoulias, E.G.; Iliakopoulou, A.; Kargakos, A.; Petrou, L. A Review of Global Path Planning Methods for Occupancy Grid Maps Regardless of Obstacle Density. Int. J. Intell. Robot. Syst. 2016, 84, 829–858. [Google Scholar] [CrossRef]
- Karur, K.; Sharma, N.; Dharmatti, C.; Siegel, J.E. A Survey of Path Planning Algorithms for Mobile Robots. Vehicles 2021, 3, 448–468. [Google Scholar] [CrossRef]
- Sánchez-Ibáñez, J.R.; Pérez-Del-Pulgar, C.J.; García-Cerezo, A. Path Planning for Autonomous Mobile Robots: A Review. Sensors 2021, 21, 7898. [Google Scholar] [CrossRef] [PubMed]
- Fadzli, S.A.; Abdulkadir, S.I.; Makhtar, M.; Jamal, A.A. Robotic Indoor Path Planning Using Dijkstra’s Algorithm with Multi-Layer Dictionaries. In Proceedings of the International Conference on Information Science and Security (ICISS), Seoul, Korea, 14–16 December 2015; pp. 1–4. [Google Scholar]
- Yang, F.; Chakraborty, N. Chance Constrained Simultaneous Path Planning and Task Assignment for Multiple Robots with Stochastic Path Costs. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May 2020–31 August 2020; pp. 6661–6667. [Google Scholar]
- Kim, K.; Chen, L.H.; Cera, B.; Daly, M.; Zhu, E.; Despois, J.; Agogino, A.K.; SunSpiral, V.; Agogino, A.M. Hopping and rolling locomotion with spherical tensegrity robots. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Korea, 9–14 October 2016; pp. 4369–4376. [Google Scholar]
- Zhang, J.; Wang, W.; Qi, X.; Liao, Z. Social and Robust Navigation for Indoor Robots Based on Object Semantic Grid and Topological Map. Appl. Sci. 2020, 10, 8991. [Google Scholar] [CrossRef]
- Wei, J.; Liu, J. Mobile robot path planning with η3-splines using spatial-fitness-sharing variable-length genetic algorithm. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems, St. Louis, MO, USA, 10–15 October 2009; pp. 978–983. [Google Scholar]
- Solak, S.; Yakut, Ö.; Bolat, E.D. Design and Implementation of Web-Based Virtual Mobile Robot Laboratory for Engineering Education. Symmetry 2020, 12, 906. [Google Scholar] [CrossRef]
- Molina-Leal, A.; Gómez-Espinosa, A.; Cabello, J.A.E.; Cuan-Urquizo, E.; Cruz-Ramírez, S.R. Trajectory Planning for a Mobile Robot in a Dynamic Environment Using an LSTM Neural Network. Appl. Sci. 2021, 11, 10689. [Google Scholar] [CrossRef]
- Luan, P.G.; Thinh, N.T. Real-Time Hybrid Navigation System-Based Path Planning and Obstacle Avoidance for Mobile Robots. Appl. Sci. 2020, 10, 3355. [Google Scholar] [CrossRef]
- Sun, X.; Deng, S.; Zhao, T.; Tong, B. Motion planning approach for car-like robots in unstructured scenario. Trans. Inst. Meas. Control 2022, 44, 754–765. [Google Scholar] [CrossRef]
- Ravankar, A.; Ravankar, A.A.; Kobayashi, Y.; Hoshino, Y.; Peng, C.C. Path Smoothing Techniques in Robot Navigation: State-of-the-Art, Current and Future Challenges. Sensors 2018, 18, 3170. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Mazzalai, A.; Biral, F.; Lio, M.D.; Darin, M.; D’Orazio, L. Automated Crossing of Intersections Controlled by Traffic Lights. In Proceedings of the IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria, Spain, 15–18 September 2015; pp. 1928–1933. [Google Scholar]
- Zhan, W.; Chen, J.; Chan, C.-Y.; Liu, C.; Tomizuka, M. Spatially-partitioned environmental representation and planning architecture for on-road autonomous driving. In Proceedings of the IEEE Intelligent Vehicles Symposium (IV), Los Angeles, CA, USA, 11–14 June 2017; pp. 632–639. [Google Scholar]
- Gutjahr, B.; Gröll, L.; Werling, M. Lateral Vehicle Trajectory Optimization Using Constrained Linear Time-Varying MPC. IEEE Trans. Intell. Transp. Syst. 2017, 18, 1586–1595. [Google Scholar] [CrossRef]
- Zhou, X.; Zhu, J.; Zhou, H.; Xu, C.; Gao, F. EGO-Swarm: A Fully Autonomous and Decentralized Quadrotor Swarm System in Cluttered Environments. In Proceedings of the IEEE International Conference on Robotics and Automation (ICRA), Xi’an, China, 30 May–5 June 2021; pp. 4101–4107. [Google Scholar]
- Mane, S.B.; Vhanale, S. Genetic Algorithm Approach for Obstacle Avoidance and Path Optimization of Mobile Robot. Adv. Intell. Syst. Comput. 2019, 810, 649–659. [Google Scholar]
- Montemerlo, M.; Becker, J.; Bhat, S.; Dahlkamp, H.; Dolgov, D.; Ettinger, S.; Haehnel, D.; Hilden, T.; Hoffmann, G.; Huhnke, B.; et al. Junior: The Stanford Entry in the Urban Challenge. In The DARPA Urban Challenge; Buehler, M., Iagnemma, K., Singh, S., Eds.; Springer: Berlin/Heidelberg, Germany, 2009; pp. 91–123. [Google Scholar]
- Petereit, J.; Emter, T.; Frey, C.W.; Kopfstedt, T.; Beutel, A. Application of Hybrid A* to an Autonomous Mobile Robot for Path Planning in Unstructured Outdoor Environments. In Proceedings of the ROBOTIK 2012; 7th German Conference on Robotics, Munich, Germany, 21–22 May 2012; pp. 1–6. [Google Scholar]
- Sedighi, S.; Nguyen, D.V.; Kuhnert, K.D. Guided Hybrid A-star Path Planning Algorithm for Valet Parking Applications. In Proceedings of the International Conference on Control, Automation and Robotics (ICCAR), Beijing, China, 19–22 April 2019; pp. 570–575. [Google Scholar]
- Tang, B.; Hirota, K.; Wu, X.; Dai, Y.; Jia, Z. Path Planning Based on Improved Hybrid A-star Algorithm. J. Adv. Comput. Intell. Intell. Inform. 2021, 25, 64–72. [Google Scholar] [CrossRef]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Practical search techniques in path planning for autonomous driving. Am. Assoc. Artif. Intell. 2008, 1001, 18–80. [Google Scholar]
- Dolgov, D.; Thrun, S.; Montemerlo, M.; Diebel, J. Path planning for autonomous vehicles in unknown semi-structured environments. Int. J. Robot. Res. 2010, 29, 485–501. [Google Scholar] [CrossRef]
- Heuristic. Available online: http://theory.stanford.edu/~amitp/GameProgramming/Heuristics.html (accessed on 2 June 2022).
- A-Star Search Algorithm. Available online: https://isaaccomputerscience.org/concepts/dsa_search_a_star?examBoard=all&stage=all (accessed on 2 June 2022).
- LaValle, S.M. Planning Algorithms; Cambridge University Press: Cambridge, UK, 2006. [Google Scholar]
- 2D Pathfinding Benchmarks. Available online: https://www.movingai.com/benchmarks/grids.html (accessed on 25 April 2022).
- PathBench: Benchmarking Platform for Classic and Learned Path Planning Algorithms. Available online: https://github.com/perfectly-balanced/PathBench (accessed on 25 April 2022).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Maps | Original RS Path | Improved RS Path | ||||||
|---|---|---|---|---|---|---|---|---|
| Curvature | Cost | Length (m) | Time (s) | Curvature | Cost | Length | Time | |
| Map A | 0.23 | 15.27 | 34.07 | 0.022 | 0.15 | 8.18 | 34.05 | 0.1 |
| Map B | 0.23 | 5.85 | 19.83 | 0.015 | 0.1 | 5.52 | 20.25 | 0.139 |
| Maps | Turning Points (before) | Original RS Path | Improved RS Path | Turning Points (after) | ||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Curvature | Cost | Length (m) | Time (s) | Curvature | Cost | Length (m) | Time (s) | |||
| map12 | 13 | 0.23 | 6.17 | 26.29 | 0.014 | 0.15 | 4.69 | 23.10 | 0.096 | 10 |
| den520d | 14 | 0.23 | 5.03 | 27.40 | 0.020 | 0.15 | 4.03 | 29.43 | 0.140 | 9 |
| ost003d | 8 | 0.23 | 3.89 | 24.51 | 0.018 | 0.10 | 3.27 | 25.26 | 0.166 | 6 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dang, C.V.; Ahn, H.; Lee, D.S.; Lee, S.C. Improved Analytic Expansions in Hybrid A-Star Path Planning for Non-Holonomic Robots. Appl. Sci. 2022, 12, 5999. https://doi.org/10.3390/app12125999
Dang CV, Ahn H, Lee DS, Lee SC. Improved Analytic Expansions in Hybrid A-Star Path Planning for Non-Holonomic Robots. Applied Sciences. 2022; 12(12):5999. https://doi.org/10.3390/app12125999
Chicago/Turabian StyleDang, Chien Van, Heungju Ahn, Doo Seok Lee, and Sang C. Lee. 2022. "Improved Analytic Expansions in Hybrid A-Star Path Planning for Non-Holonomic Robots" Applied Sciences 12, no. 12: 5999. https://doi.org/10.3390/app12125999
APA StyleDang, C. V., Ahn, H., Lee, D. S., & Lee, S. C. (2022). Improved Analytic Expansions in Hybrid A-Star Path Planning for Non-Holonomic Robots. Applied Sciences, 12(12), 5999. https://doi.org/10.3390/app12125999