
Power Management for Connected EVs Using a Fuzzy Logic Controller and Artificial Neural Network


Abstract
:1. Introduction
2. System Description
2.1. Hybrid Energy Storage System
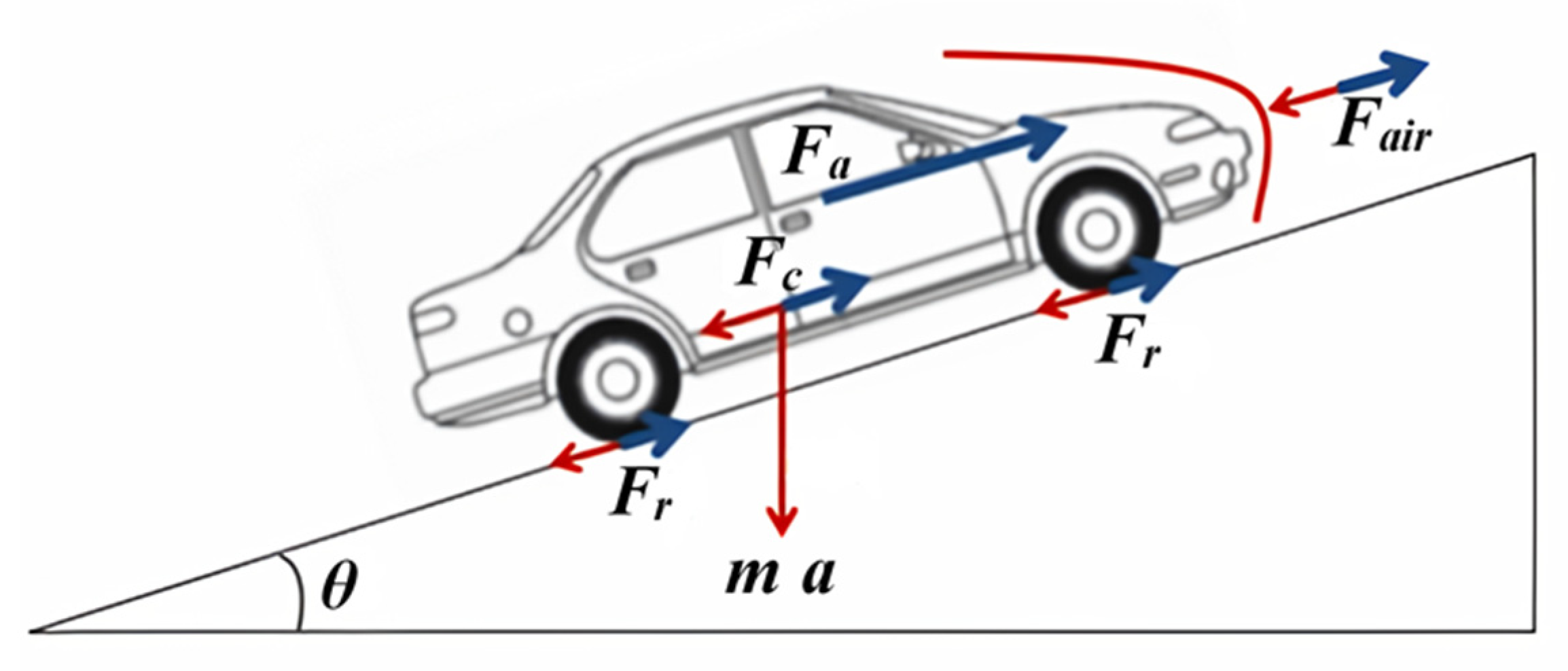
2.2. EV Power Demand Calculation
- Pt = power traction (W);
- m = vehicle mass (kg);
- v = speed (m/s);
- g = gravity force (m/s2);
- θ = slope angle (rad);
- fr = rolling resistance coefficient;
- ρ = air density (kg/m3);
- Af = vehicle’s frontal area (m2);
- Cd = aerodynamics resistance coefficient;
- 𝑣𝑤 = wind speed (m/s).
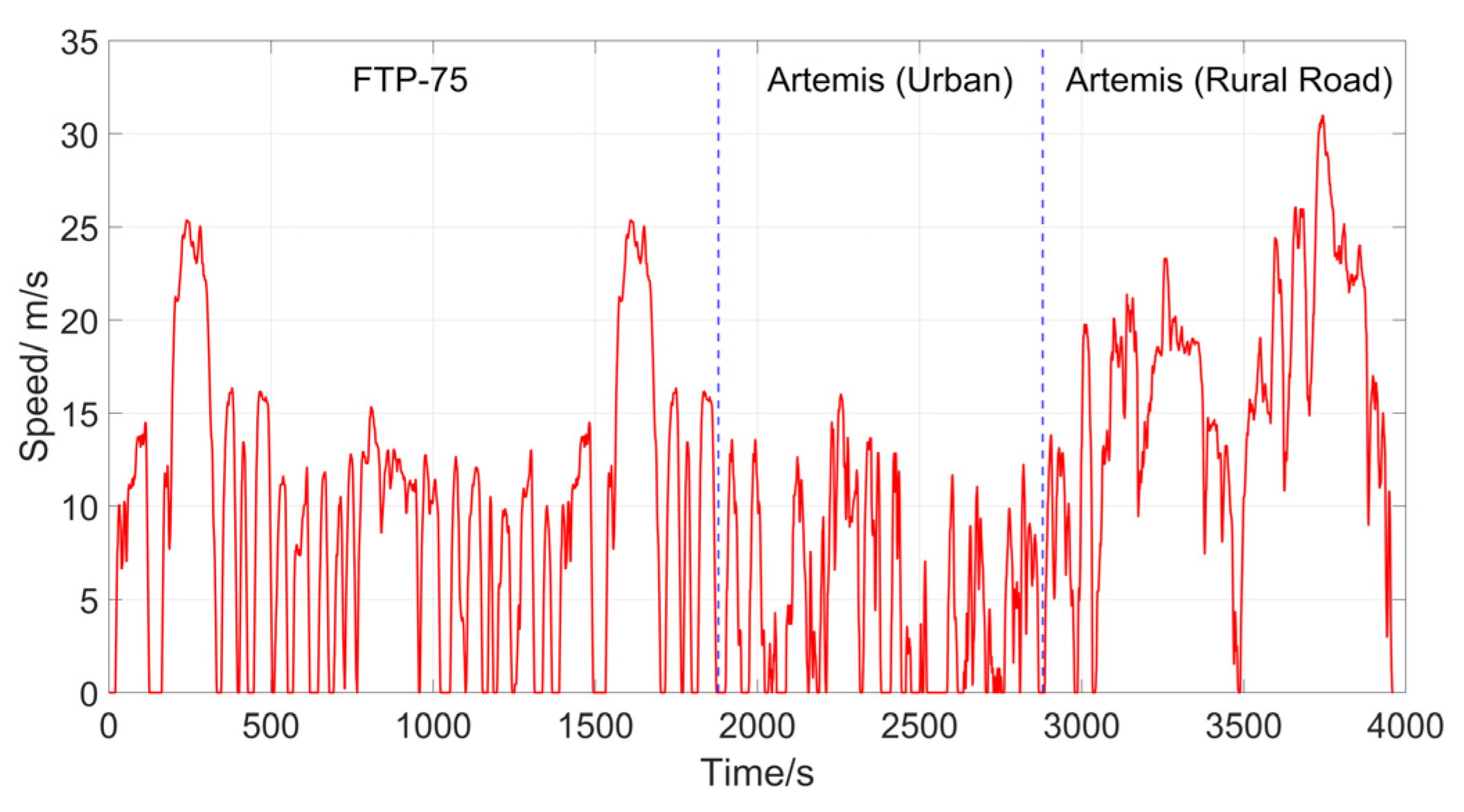
2.3. Driving Cycle
3. Problem Statement and Solving Method
3.1. Hierarchical Control Structure
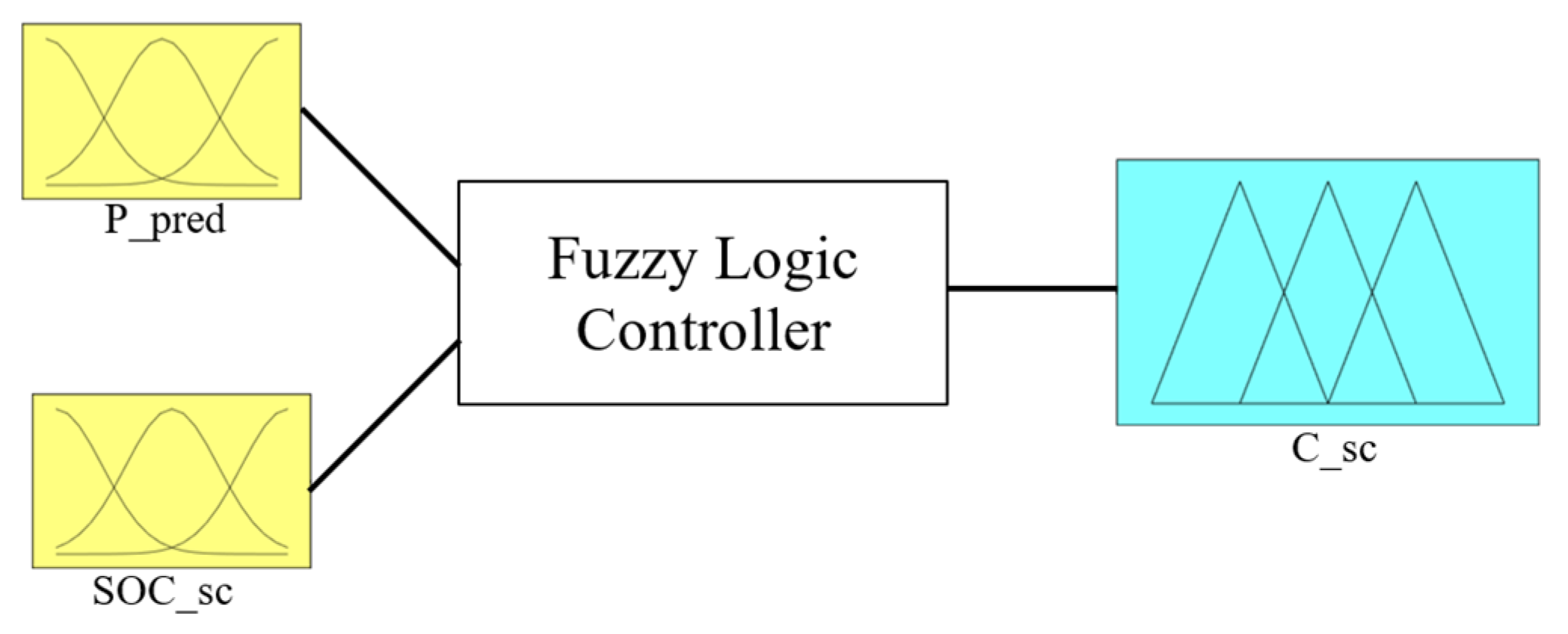
3.2. Level 1: Electronic Circuit Controller
- If the required predicted power is high/medium–high and the SOC of the SC is high/medium, then the SC will supply most of the power.
- If the required predicted power is high and the SOC of the SC is low, then the SC will still supply most of the power.
- If the required predicted power is medium–high and the SOC of the SC is low, then the power supplied by the battery and SC is almost balanced.
- If the required predicted power is medium–low/low and the SOC of the SC is high/medium, then the power supplied by the battery and SC is almost balanced.
- If the required predicted power is medium–low/low and the SOC of the SC is low, then the battery will supply most of the power.
- An exception for rule number 4: if the required predicted power is medium-low and the SOC of the SC is high, then the SC will still supply most of the power.
3.3. Level 2: Reference for on Board Electronic Circuit
3.4. Hierarchical Power Management for Connected EV
4. Simulation Result and Analysis
4.1. Simulation Parameters and Setup
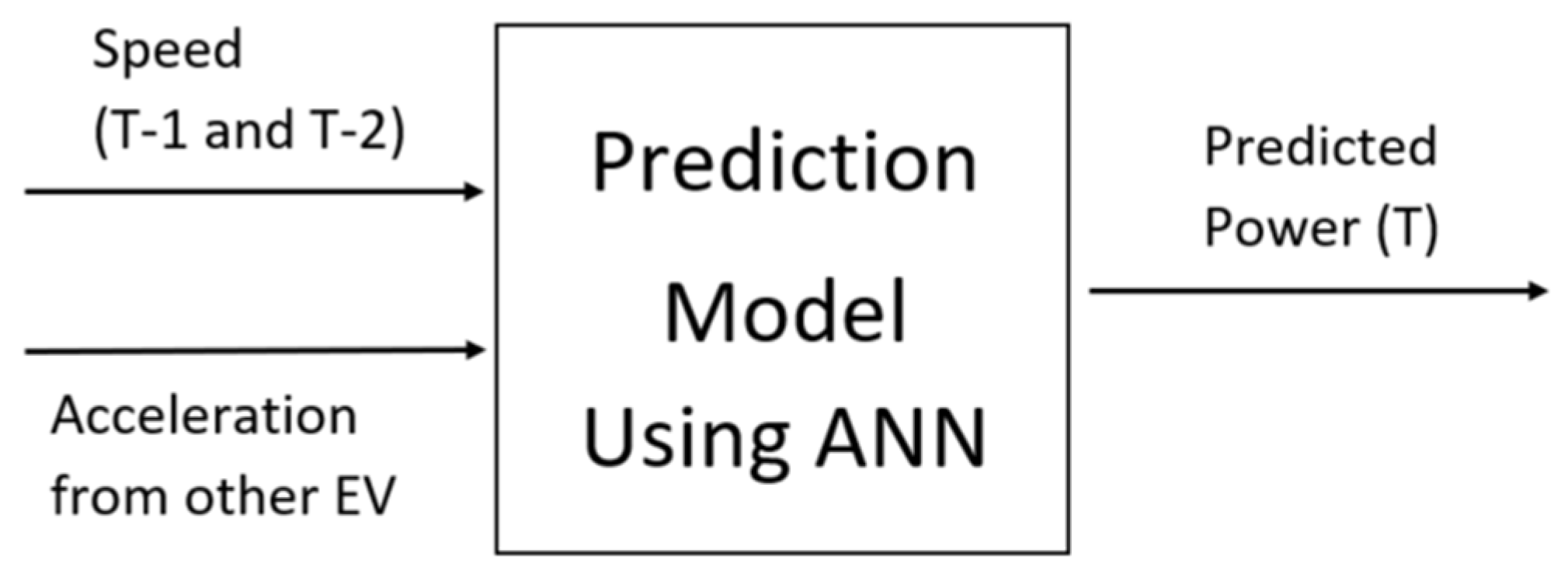
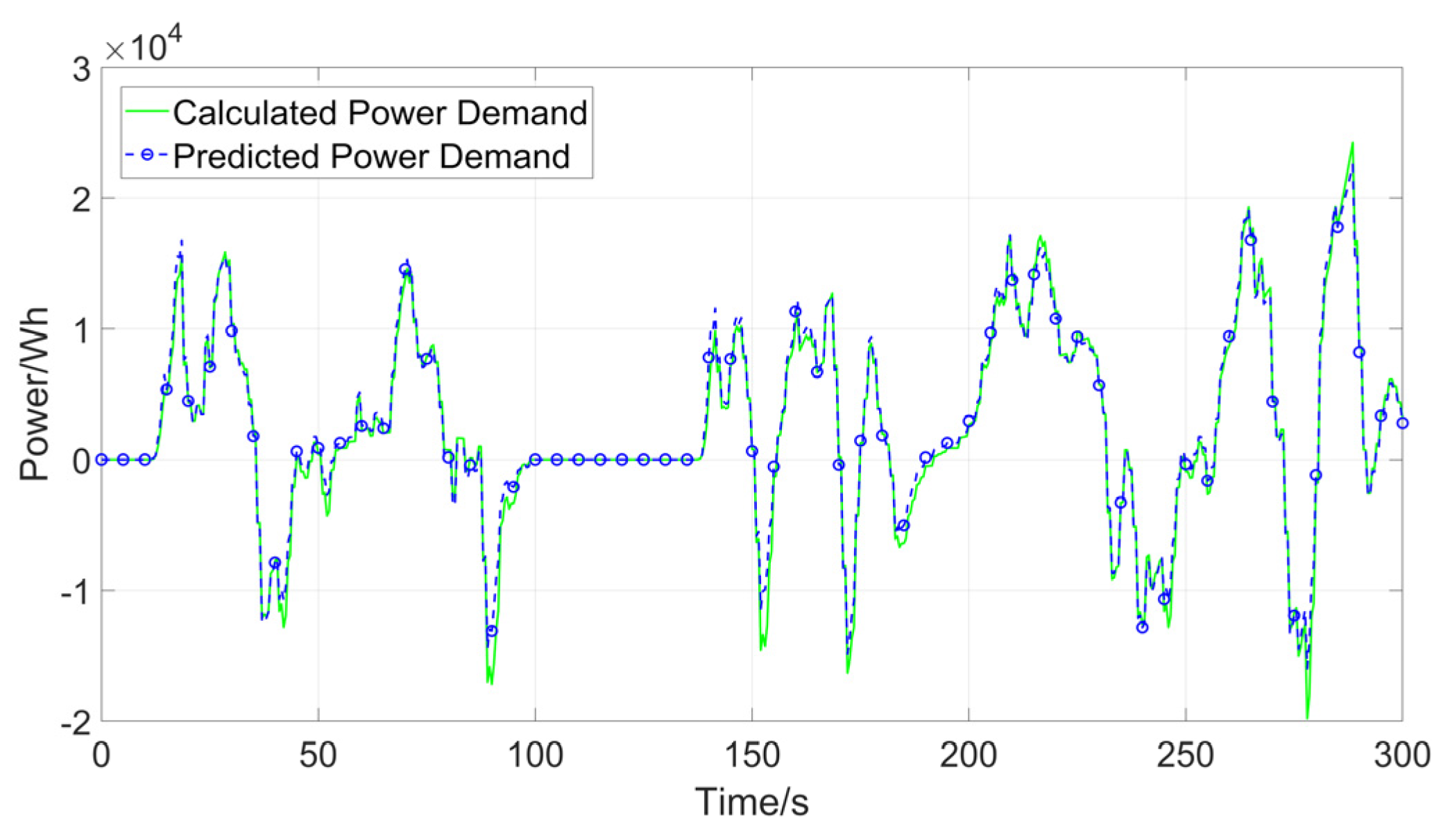
4.2. Power Demand Prediction Results and Analysis
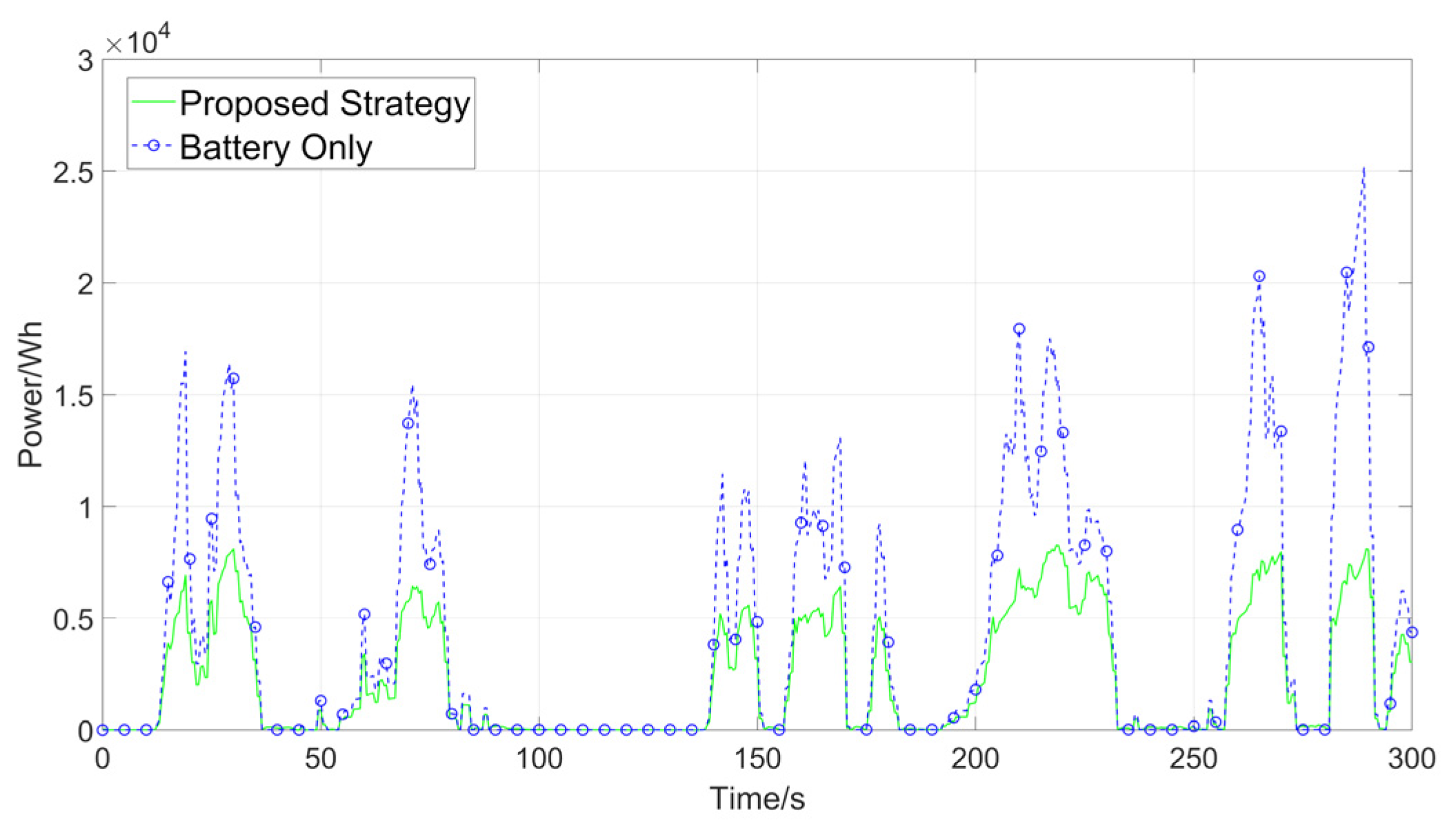
4.3. Power Distribution Results and Analysis
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Ranawat, D.; Prasad, M. A review on electric vehicles with perspective of battery management system. In Proceedings of the 2018 International Conference on Electrical, Electronics, Communication, Computer, and Optimization Techniques (ICEECCOT), Msyuru, India, 14–15 December 2018; pp. 1539–1544. [Google Scholar]
- Andwari, A.M.; Pesiridis, A.; Rajoo, S.; Martinez-Botas, R.; Esfahanian, V. A review of Battery Electric Vehicle technology and readiness levels. Renew. Sustain. Energy Rev. 2017, 78, 414–430. [Google Scholar] [CrossRef]
- Weiss, H.; Winkler, T.; Ziegerhofer, H. Large lithium-ion battery-powered electric vehicles—From idea to reality. In Proceedings of the 2018 ELEKTRO, Mikulov, Czech Republic, 21–23 May 2018; pp. 1–5. [Google Scholar]
- Ajith, T.A.; Dhas, G.J.S. A SurveyOn Hybrid Energy Storage System for EV With Regenerative Braking. In Proceedings of the 2018 International Conference on Control, Power, Communication and Computing Technologies (ICCPCCT), Msyuru, India,, 14–15 December 2018; pp. 250–255. [Google Scholar]
- Kouchachvili, L.; Yaïci, W.; Entchev, E. Hybrid battery/supercapacitor energy storage system for the electric vehicles. J. Power Sources 2018, 374, 237–248. [Google Scholar] [CrossRef]
- Song, Z.; Hou, J.; Xu, S.; Ouyang, M.; Li, J. The influence of driving cycle characteristics on the integrated optimization of hybrid energy storage system for electric city buses. Energy 2017, 135, 91–100. [Google Scholar] [CrossRef]
- Bhat, P.N.; Veena, M. Design of Efficient Power Management System using Ultra Capacitors. In Proceedings of the 2019 Global Conference for Advancement in Technology (GCAT), Bangalore, India, 18–20 October 2019; pp. 1–5. [Google Scholar]
- Song, Z.; Hou, J.; Hofmann, H.; Li, J.; Ouyang, M. Sliding-mode and Lyapunov function-based control for battery/supercapacitor hybrid energy storage system used in electric vehicles. Energy 2017, 122, 601–612. [Google Scholar] [CrossRef]
- Wang, X.; Tao, J.; Zhang, R. Fuzzy energy management control for battery/ultra-capacitor hybrid electric vehicles. In Proceedings of the 2016 Chinese Control and Decision Conference (CCDC), Yinchuan, China, 28–30 May 2016; pp. 6207–6211. [Google Scholar]
- Muntaser, A.; Elwarfalli, H.; Kumar, J.; Subramanyam, G. Development of advanced energy storage system using fuzzy control. In Proceedings of the 2016 IEEE National Aerospace and Electronics Conference (NAECON) and Ohio Innovation Summit (OIS), Dayton, OH, USA, 25–29 July 2016; pp. 179–182. [Google Scholar]
- Martinez, D.; Poveda, J.; Montenegro, D. Li-ion battery management system based in fuzzy logic for improving electric vehicle autonomy. In Proceedings of the 2017 IEEE Workshop on Power Electronics and Power Quality Applications (PEPQA), Bogotá, Colombia, 31 May 2017–2 June 2017; pp. 1–6. [Google Scholar]
- Seixas, L.D.; Tosso, H.G.; Corrêa, F.C.; Eckert, J.J. Particle Swarm Optimization of a Fuzzy Controlled Hybrid Energy Storage System-HESS. In Proceedings of the 2020 IEEE Vehicle Power and Propulsion Conference (VPPC), Gijon, Spain, 18 November–16 December 2020; pp. 1–6. [Google Scholar]
- Wang, L.; Wang, Y.; Liu, C.; Yang, D.; Chen, Z. A power distribution strategy for hybrid energy storage system using adaptive model predictive control. IEEE Trans. Power Electron. 2019, 35, 5897–5906. [Google Scholar] [CrossRef]
- Chen, H.; Xiong, R.; Lin, C.; Shen, W. Model predictive control based real-time energy management for a hybrid energy storage system. CSEE J. Power Energy Syst. 2020, 7, 862–874. [Google Scholar]
- Mei, Y.; Li, X.; Qi, Y. A model predictive control method for three-level bi-directional DC-DC converter in renewable generation system. In Proceedings of the 2015 18th International Conference on Electrical Machines and Systems (ICEMS), Pattaya, Thailand, 25–28 October 2015; pp. 417–421. [Google Scholar]
- Gomozov, O.; Trovão, J.P.F.; Kestelyn, X.; Dubois, M.R. Adaptive energy management system based on a real-time model predictive control with nonuniform sampling time for multiple energy storage electric vehicle. IEEE Trans. Veh. Technol. 2016, 66, 5520–5530. [Google Scholar] [CrossRef]
- Moser, D.; Schmied, R.; Waschl, H.; del Re, L. Flexible spacing adaptive cruise control using stochastic model predictive control. IEEE Trans. Control Syst. Technol. 2017, 26, 114–127. [Google Scholar] [CrossRef]
- Song, Z.; Li, J.; Hou, J.; Hofmann, H.; Ouyang, M.; Du, J. The battery-supercapacitor hybrid energy storage system in electric vehicle applications: A case study. Energy 2018, 154, 433–441. [Google Scholar] [CrossRef]
- Xiong, R.; Chen, H.; Wang, C.; Sun, F. Towards a smarter hybrid energy storage system based on battery and ultracapacitor-A critical review on topology and energy management. J. Clean. Prod. 2018, 202, 1228–1240. [Google Scholar] [CrossRef]
- Zhang, Q.; Li, G. Experimental study on a semi-active battery-supercapacitor hybrid energy storage system for electric vehicle application. IEEE Trans. Power Electron. 2019, 35, 1014–1021. [Google Scholar] [CrossRef]
- Hwang, H.-Y. Developing Equivalent Consumption Minimization Strategy for Advanced Hybrid System-II Electric Vehicles. Energies 2020, 13, 2033. [Google Scholar] [CrossRef]
- André, M. The ARTEMIS European driving cycles for measuring car pollutant emissions. Sci. Total Environ. 2004, 334, 73–84. [Google Scholar] [CrossRef] [PubMed]
- Lago, L.F.; Faceroli, S.T.; Ferreira, R.A.; Rodrigues, M.C. Power Demand Prediction Based on Mixed Driving Cycle Applied to Electric Vehicle Hybrid Energy Storage System. In Proceedings of the 2019 IEEE 15th Brazilian Power Electronics Conference and 5th IEEE Southern Power Electronics Conference (COBEP/SPEC), São Paulo, Brazil, 1–4 December 2019; pp. 1–6. [Google Scholar]
- Hu, Y.; Chen, C.; He, J.; Yang, B.; Guan, X. IoT-based proactive energy supply control for connected electric vehicles. IEEE Internet Things J. 2019, 6, 7395–7405. [Google Scholar] [CrossRef]
- Burghardt, F.; Garbe, R. Introduction of artificial neural networks in EMC. In Proceedings of the 2018 IEEE Symposium on Electromagnetic Compatibility, Signal Integrity and Power Integrity (EMC, SI & PI), Long Beach, CA, USA, 30 July 2018–3 August 2018; pp. 165–169. [Google Scholar]
- Syafie, L.; Indra, D.; Hamrul, H.; Anraeni, S.; Ilmawan, L.B. Comparison of Artificial Neural Network and Gaussian Naïve Bayes in Recognition of Hand-Writing Number. In Proceedings of the 2018 2nd East Indonesia Conference on Computer and Information Technology (EIConCIT), South Sulawesi, Indonesia, 6–7 November 2018; pp. 276–279. [Google Scholar]
- Sze, V.; Chen, Y.-H.; Yang, T.-J.; Emer, J.S. Efficient processing of deep neural networks: A tutorial and survey. Proc. IEEE 2017, 105, 2295–2329. [Google Scholar] [CrossRef] [Green Version]
- Wang, Y.; Shen, Y.; Mao, S.; Cao, G.; Nelms, R.M. Adaptive learning hybrid model for solar intensity forecasting. IEEE Trans. Ind. Inform. 2018, 14, 1635–1645. [Google Scholar] [CrossRef]
- Das, T.; Tripathy, A.K.; Mishra, A.K. Optical character recognition using artificial neural network. In Proceedings of the 2017 international conference on computer communication and informatics (ICCCI), Coimbatore, India, 5–7 January 2017; pp. 1–4. [Google Scholar]
- Wang, Y.; Shen, Y.; Mao, S.; Chen, X.; Zou, H. LASSO and LSTM integrated temporal model for short-term solar intensity forecasting. IEEE Internet Things J. 2018, 6, 2933–2944. [Google Scholar] [CrossRef]
- Kim, E.; Lee, J.; Shin, K.G. Real-time prediction of battery power requirements for electric vehicles. In Proceedings of the 2013 ACM/IEEE International Conference on Cyber-Physical Systems (ICCPS), Philadelphia, PA, USA, 8–11 April 2013; pp. 11–20. [Google Scholar]
- Summala, H. Brake reaction times and driver behavior analysis. Transp. Hum. Factors 2000, 2, 217–226. [Google Scholar] [CrossRef]
- Taoka, G.T. Brake reaction times of unalerted drivers. ITE J. 1989, 59, 19–21. [Google Scholar]
- Bielaczyc, P.; Woodburn, J.; Szczotka, A. The WLTP as a new tool for the evaluation of CO2 emissions. In Proceedings of the FISITA World Automotive Congress 2014, Maastricht, The Netherlands, 2–6 June 2014. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| 1730 kg | |
| 9.81 m/s2 | |
| θ | 0 rad |
| 0.015 | |
| 1.25 km/m3 | |
| 2.39 m2 | |
| 0.3 | |
| 𝑣𝑤 | 0 m/s |
| Parameters | Battery Pack | SC Pack |
|---|---|---|
| Voltage | 352 V | 297 V (2.7 V Cell) |
| Rated Capacity | 120 Ah | 310 F (5.6 F in total, 110 series, 2 parallel) |
| Energy | 42.2 kWh | 68.6 Wh |
| Initial SOC | 80% | 75% |
| Type | Lithium-Ion | Generic model |
| Strategy | Average Battery Power (kWh) | Battery Power Variation (kWh) |
|---|---|---|
| Battery-only | 4.26 | 5.61 |
| Proposed Strategy | 2.29 | 2.67 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Angundjaja, C.Y.; Wang, Y.; Jiang, W. Power Management for Connected EVs Using a Fuzzy Logic Controller and Artificial Neural Network. Appl. Sci. 2022, 12, 52. https://doi.org/10.3390/app12010052
Angundjaja CY, Wang Y, Jiang W. Power Management for Connected EVs Using a Fuzzy Logic Controller and Artificial Neural Network. Applied Sciences. 2022; 12(1):52. https://doi.org/10.3390/app12010052
Chicago/Turabian StyleAngundjaja, Clint Yoannes, Yu Wang, and Wenying Jiang. 2022. "Power Management for Connected EVs Using a Fuzzy Logic Controller and Artificial Neural Network" Applied Sciences 12, no. 1: 52. https://doi.org/10.3390/app12010052
APA StyleAngundjaja, C. Y., Wang, Y., & Jiang, W. (2022). Power Management for Connected EVs Using a Fuzzy Logic Controller and Artificial Neural Network. Applied Sciences, 12(1), 52. https://doi.org/10.3390/app12010052