1. Introduction
Powertrain hybridization seems to be a viable mid-term solution for the reduction of vehicle fuel consumption and tailpipe emissions [
1,
2,
3,
4]. Hybrid Electric Vehicles (HEVs) can be of series, parallel or combined (series-parallel, power-split) configurations [
1,
2]. Parallel configurations offer a cost-effective solution due to: easier integration of the HEV modules in an existing powertrain; the presence of a single electric motor (EM); and a small electric battery (especially in mild HEVs) [
2,
3].
Among parallel HEV architectures, the so-called P2 configuration is gaining the utmost attention of vehicle manufacturers as well as researchers due to its scalability and an increased number of operating modes [
2,
3,
4]. As shown in
Figure 1, in a P2 configuration, the electric machine (EM) is installed on the input shaft of the gearbox after the main clutch C0. Opening the C0 allows for driving in pure electric as well as for an efficient regeneration of the braking energy. By adding the clutch C1, the EM can be used as a starter to crank the ICE as well as for gear shifting.
Depending on the location of the EM, the P2 configuration can be on-axis or off-axis. The off-axis P2 HEVs have a stage of parallel axis gear, chain or belt drives (
Figure 1) with advantages in terms of the axial size of the powertrain and the potential to have a smaller electric machine running at higher speed than the ICE.
Owing to the possibility of scaling the EM and the battery module, P2 is compatible with both mild and plug-in HEV, the mild P2 being characterized by a relatively smaller EM power and battery capacity [
5,
6]. An analysis of commercially available MHEVs shows that mostly they have a battery capacity in the range of 0.5–2 kWh [
6,
7].
Fuel consumption reduction is the main design goal of Mild HEVs, and this requires an integrated design of the powertrain components as well as the control strategy to avoid jeopardizing the vehicle’s dynamic performance [
8,
9]. A wide range of controllers has been proposed to this end in the literature. Rule-based supervisory controllers are the simplest to implement, however, they have limited performance when compared to optimization-based counterparts [
10]. Optimization-based controllers like dynamic programming (DP) [
9,
10,
11], equivalent consumption minimization strategy (ECMS) [
11,
12,
13], and model predictive control (MPC) [
14] are more performant in finding a global minimum of fuel consumption. However, they need a higher computational effort, require prior knowledge about the driving cycle, and hence can mainly be used in offline control strategies [
10,
13]. Comparable results to the ECMS can be obtained by implementing fuzzy logic rules, which can be very complex in the case of a large number of control variables [
15].
The ECMS was first proposed by [
12] as a real-time controller offering a near-optimal solution without prior knowledge of the drive cycle [
13,
16]. Furthermore, it allows for the constraint of various system variables by integrating them in a cost function by means of penalty functions. The main principle of the ECMS is to minimize the total equivalent fuel consumption at each time instant, including the contribution coming from the electrical energy to or from the battery. The optimization is constrained by the battery state of charge (SOC) and the maximum/minimum torque of the EM and ICE [
12,
15]. Additionally, it is well known that the battery is a safety-critical system that might cause a fire at high temperatures. Hence, most battery management systems (BMS) monitor the battery temperature in real-time to operate at less than 55 °C [
16,
17,
18]. A review of fire incidence associated with electric and HEVs can be found in [
19].
The control of the battery temperature can be accomplished by systems of different complexity, from simple passive cooling (heat is conducted through the battery casing and natural convection), to active cooling [
17,
18] (resorting to air or liquid as a coolant, or by other means such as using phase change materials [
20]).
The influence of battery temperature on the performance and fuel consumption of HEV is discussed in [
13], considering a 100 Ah capacity Lithium battery. Penalty factors for different ambient temperature and drive cycle combinations are integrated with the cost function of the ECMS supervisor. A battery aging semi-empirical model is taken into account along with its temperature dynamics, showing that cold ambient temperature causes a frequent charge and discharge of the battery due to the battery capacity reduction in cold ambient temperatures. The limitation of the electric traction due to high battery temperatures is not considered in the work [
13].
Padovani et al. has studied how battery aging is affected by high or low temperatures, and high SOC [
21]. A penalty for using the battery at high temperatures is included in the cost function. Considering a 7 kWh lithium-ion battery, an ambient temperature of 15 °C running on an Artemis drive cycle, the battery temperature does not exceed 35 °C. The lower operating temperatures in this work can be attributed to the large battery size.
Sarvaiya et al. [
22] compared different control strategies incorporating the battery ageing model in the cost function. Considering the EPA driving cycle, and a pure electric vehicle with a relatively large 9 kWh lithium-ion battery, high temperatures are not an issue, with the temperature reaching 32 °C from a 30 °C ambient temperature.
An accurate electro-thermal model of the battery pack is needed to study the influence of the battery temperature in HEV. Battery heat generation induced by the electrical current can be divided into irreversible and reversible components [
23,
24]. The former is related to the Joule and polarization effects due to the current flowing through the internal resistance and charge transfer. The latter is due to the entropy change, which is related to the temperature dependence of the open circuit voltage (OCV). Barcellona and Piegari in [
25] propose a model that can predict the thermal behaviour of a pouch lithium-ion battery cell based on its current and ambient conditions. The model only takes the effect of the OCV and internal resistance into account. However, the resistive-capacitive (RC) parallel branches are not included in the model of the battery, as the thermal time constant greatly outweighs the electrical one. Madani et al. in [
26] review the determination of thermal parameters of a single cell, such as internal resistance, specific heat capacity, entropic heat coefficient, and thermal conductivity. These parameters are then used for the design of a suitable thermal management system. A lumped-parameter thermal model of a cylindrical LiFePO4/graphite lithium-ion battery is developed in [
27] to compute the internal temperature.
Thermal management systems with active heating and cooling can be adopted for controlling the temperature in the battery pack [
28,
29,
30]; however, the additional cost and complexity would not be affordable, especially in 48 V micro or mild hybrid electric vehicles. Conversely, 48 V micro or mild hybrids are potentially characterized by high-temperature fluctuations due to the large C-rate reached in boost and recuperation due to the small battery capacity.
The influence of battery temperature limitations on the fuel consumption of mild HEVs and the study of battery capacity, above which temperature does not represent a criticality, seems to be still largely unattended in the vast literature on the topic. Additionally, most of the literature that addresses energy management problems has adopted a simplified analytical model to estimate battery SOC and temperature. Such models can only be accurate under limited scenarios and hence could impose a limitation on model accuracy in a wider range of applications.
Hence, the main contribution of the present work is to address the following points: (a) to extend the existing control strategies to include the thermal limitations in the case of a 48 V P2 Mild HEV with passive cooling; (b) to validate the electro-thermal model of the battery by means of existing experimental data; and (c) to investigate the influence of the battery capacity on reaching thermal limitations and determine the minimum battery capacity to avoid thermal runaway.
The paper is organized as follows: In
Section 2, the backward model of the conventional vehicle and P2 HEV are developed. The model of the conventional vehicle is validated using the experimental results reported in [
31,
32]. Furthermore, the electro-thermal model of the battery and its experimental validation are presented in this section.
Section 3 presents the supervisory controller based on ECMS considering the thermal limitations of the battery.
Section 4 reports the results of the simulation. Finally,
Section 5 summarizes the main findings of the paper.
3. Development of Supervisory Control Strategy
The supervisory control strategy based on the Equivalent Consumption Minimization Strategy optimally splits the required traction torque between the traction sources while minimizing the objective function. In this section, three types of ECMS are demonstrated. The first type is the ECMS without considering the battery thermal limitations. The second type is an ECMS with an on/off switching of the electric traction when the battery temperature threshold is reached. Finally, in the third type, the thermal limitations are integrated into the penalty functions on the temperature and the temperature dynamics are set in the objective function.
3.1. ECMS Control Strategy without Thermal Limitations
To achieve an effective reduction in fuel usage, the contribution of electric motor power should be defined in such a way that the engine operates in its higher efficiency zone. For this reason, the ECMS was applied to the MHEV backward model to determine the power split ratio between the engine and the EM. From the configuration of the MHEV system, the rotational speeds of the power sources are set by vehicle velocity. Hence, the ECMS controller splits only the torque between the engine and EM.
Objective function:
The objective function for the ECMS is overall equivalent fuel consumption (
) which is evaluated as a sum of engine fuel consumption
and equivalent fuel consumption of the electric power usage
for the power drawn from the battery
[
10,
12]:
equivalent fuel consumption of EM can be computed as the fuel consumption of the ICE to provide the same mechanical power generated by electric motor [
12]:
is the battery equivalent fuel consumption factor, depending on battery discharging (
) or charging (
) modes as:
where
is the lower heating value of the fuel,
is the average efficiency of the ICE,
is the average efficiency of the EM and
is the average efficiency of the inverter.
The mathematical model for ICE fuel consumption rate
at a given operation point
was obtained by steady state curve fitting of the engine map data (see
Figure 10). The regression coefficients of the polynomial function (see Equation (18)) were estimated accurately since the goodness of this fitting indicated R-square = 0.9961.
Once the objective function is expressed as a function of EM torque and engine torque (independent variables), then constraints were constituted based on operation limits and satisfying the required torque demand of the vehicle.
Constraints:
As shown in Equation (19), a necessary condition is to provide the required torque and request that the sum of torque contributions of two sources at the output of the gearbox be equal to torque demand at the same level. Moreover, the ICE and EM torques must be within the corresponding operating envelope:
where,
—gear ratio on the pulley that connects EM to the input shaft of the gearbox and
—gear ratio of engaged gears in the gearbox.
By minimizing the objective function (Equation (15)) over the range described in the constraints (Equation (18)), the optimum value of ) can be estimated instantly, without considering the SOC level. When SOC is too low, the controller must restrict usage of the EM. On the other hand, when the SOC is near its upper threshold limit, the controller tends to use the EM power. Moreover, to accurately compare the fuel consumption of HEV, results should be indicated for the charge sustaining mode where SOC has the same level at the beginning and at the end of the driving cycle.
Charge sustaining mode:
Therefore, to maintain the battery SOC within the lower
and upper
limits, an s-shaped correction function
was introduced to penalize the equivalent fuel consumption of the battery [
10]. If the SOC decreases below the threshold (0.6 in this case), the vehicle tends to restrict the usage of electric energy, hence the
starts to rise. Otherwise, the correction factor is equal to 1, meaning that no limitation to utilize the electric power is applied. In terms of an equation, the above condition can be represented as:
where
is a normalized state of charge that can be computed as [
10]:
where,
and
values are used as upper and lower threshold limits for SOC of the battery.
The coefficients in Equation (20) are chosen based on multiple trials to obtain the best fuel consumption.
The plot in
Figure 11 shows the variation of
as a function of SOC.
Then the objective function in Equation (15) is modified with the penalization for low SOC values, as:
By minimizing this objective function, the torque split is performed to minimize the fuel consumption without considering the thermal limitations of the battery. However, as was mentioned, the optimal operating temperature range for lithium-ion batteries is between
, otherwise, their safety, power and life are impacted [
17,
18,
20]. Therefore, temperature limitation will be implemented in the ECMS controller in the next step.
3.2. ECMS Control Strategy with Thermal Limitations Using Temperature Threshold
To avoid the thermal runaway of the battery, limitations can be applied by setting the battery temperature
threshold to 55 °C. Over this temperature, the usage of electric power is limited. Hence, the required power is provided mainly by the ICE. This is implemented by setting the penalty factor
to a huge number when the battery temperature is over the given threshold as shown in Equation (23). As can be seen, if the battery temperature is
°C the penalty factor is set to a very high number i.e., to 1000, regardless of the battery SOC.
Then, the penalty factor in Equation (22) is replaced with the penalty factor which considers the thermal condition of the battery as well. By implementing such a limitation, the penalty factor works as an on/off switch triggered by the temperature threshold and battery operation outside of the designed operating temperature range can be avoided. However, this limitation does not include the rate of temperature change, which might result in a temperature overshoot due to a previous power drain from the battery. In the next step, the temperature change rate is also limited.
3.3. ECMS Control Strategy with Thermal Limitations Using Penalty Function on Temperature and Temperature Change Rate
To avoid thermal shocks in the battery, the penalty factor is represented as a cumulative product of penalty factors on the temperature
, on the temperature change rate
and on the SOC
are applied to equivalent fuel consumption (
) of the electric motor:
The penalty function on temperature
is defined as:
where
is normalized temperature calculated as a function of upper
and lower
temperature limit as [
10]:
where:
and
.
Function of
is plotted in
Figure 12a, it has a value of about 1 when the battery temperature is lower than 40 °C. As the battery temperature increases beyond 40 °C, a correction factor
gets higher value, so usage of EM power will be limited.
The penalty on the temperature change rate
is used to avoid a high-temperature change rate which could induce the thermal shock on the battery is:
where
is normalized temperature change rate, a function of upper
and lower
temperature change limits [
10]:
where for upper and lower limits for rate of temperature change are:
The graphical representation of
is given in
Figure 12b.
4. Results and Experimental Validation of the Developed Model
An intermediate step of the HEV modelling was to validate the conventional vehicle model by comparing it to experimental data. To validate the model, experimental data from ANL [
31] for a conventional vehicle was compared with the results of the developed model simulation. Furthermore, the battery electro-thermal model was validated experimentally using a developed test bench that was developed in-house. The simulation model of the mild P2 HEV is discussed afterwards in this section.
4.1. Experimental Validation of Conventional Vehicle Model
The conventional vehicle model was obtained by disabling the ECMS controller, Electric Machine, and Battery Electro-Thermal model subsystems. This vehicle model was designed based on a backward model was developed in Matlab/Simulink environment using all characteristics and parameters of the selected vehicle. The model estimates the fuel consumption of the vehicle by computing the required ICE speed (
) and torque (
) for a given driving cycle. To validate the model, experimental test data of the powertrain components and of the vehicle from ANL were used. The data includes measurements of the vehicle speed (
), the ICE torque (
) and its angular speed
), the selected gear (
), and the instantaneous fuel consumption (
) profile. A Mazda CX9 2016 SUV was selected for further analysis. The complete data of the ICE map and the vehicle parameters are available in [
32]. For the validation, the simulated value of the torque, the angular speed and the fuel consumption rate of the ICE, and the engaged gear of the gearbox were compared to those from the experiments reported by ANL.
As is shown in
Figure 13, the input is the speed profile of the UDDS driving cycle. The gearshift in the model is defined on the basis of the vehicle velocity and the result of the gear ratio is almost overlapping with the ANL experimental data (
Figure 13b). Moreover, the simulated values of the ICE angular speed (
Figure 13c) and the torque (
Figure 13d) reported at the output of the gearbox show a good match with experimental data. For the calculation of the tire radius (Equation (3)), the coefficient
was chosen to be equal to 0.95. The simulated and experimental values for the fuel rate (
Figure 13e) have slight differences, due to the fact that transient fuel consumption is not taken into account.
Figure 13e visualizes this fact, where the differences are mainly in the transient phases, which was not modelled. For the total fuel consumed during the UDDS cycle, a simulated value of 699 g vs. an experimental value of 739 g was obtained. This corresponds to a difference of about 5%. However, if transient fuel consumption behaviour of the engine is excluded this difference is within just 2% (713 g), while the other 3% of the difference is due to transient phenomena which is not included in the developed model as mentioned above.
4.2. Electro-Thermal Model Validation
The Electro-thermal model was experimentally validated using the experimental test bench described in
Figure 14. The test bench consisted of six cells connected in a series with voltage across the cells measured with Elithion cell boards. An LM35 Texas Instrument temperature sensor was used to measure the cell surface temperature. An Elithion (Lithiumate) Battery Management System (BMS) was installed on the test bench to enhance the safety of the acquisition process. An Arduino Mega board connected via LAN to a dedicated PC was then used to acquire the measured data. As an extra safety measure, the system was equipped with an emergency stop device.
The experimental data consisting of a dynamic current (A) input, battery surface temperature (°C) and voltage (V) outputs were collected at room temperature from an NRC18650G-HOANA cell of 3200 mAh rated capacity. The dynamic current input was in the range of
for both the charge and discharge phases. With the experiment conducted at ambient temperature, the estimated and the measured voltages were compared as in
Figure 15b. The thermal model was equally validated, and the result is shown in
Figure 15c.
4.3. Parallel Cell Module (PCM)
With the single-cell model designed and validated, the model forms a building block for developing the PCM and the SMP for further integration in a complete vehicle model.
A battery PCM consists of cells that are connected in parallel while the SMP consists of battery modules that are connected in series to make a battery pack. A 14s6p battery pack configuration entails 14 SMP and six PCM. The parallel cell configuration is often useful for increasing the energy capacity of the battery pack, especially for various high energy applications.
The current through each cell in a module
can be computed from Equation (29) if the module voltage
can be derived. By Kirchhoff’s law, the sum of all the individual current that passes through a module is equal to the pack current. Also, the voltages at the terminal of all the cells in the module are equal. The cell voltage has two contributions: the instantaneous voltage that changes instantly with the current and the non-instantaneous state voltages
.
of the joule, the loss is modified to accommodate the cell terminal losses.
The sum of the current through the individual cells in module
can be computed from Equation (29).
is the number of parallel branches in the module and is the branch index.
By simultaneous computation of Equations (29) and (30), the current through each cell in the module and the voltage can be derived. The modules are connected in series to develop an SMP. To design a 48 V, 0.9 kWh battery pack, a 14s6p configuration was used.
The temperature distribution within the battery pack was evaluated on the basis of the variation of the SOC and the capacity of the cells within the battery pack. The battery pack was simulated to show these variations.
Figure 16a shows the variation of temperature when the initial SOC varies from 0.85 to 0.95, assuming an equal total capacity of 3.0 Ah for the individual cells.
Figure 16b shows the variation of temperature when the cell capacity varies from 2.7 Ah to 3.0 Ah, assuming equal initial SOC of 0.95 for all cells.
Based on the result of the simulation shown in
Figure 16, the maximum temperature of the battery pack is in the range of 60 °C to 70 °C at the end of the tests. The temperature variation is larger for varying SOC than for varying capacity.
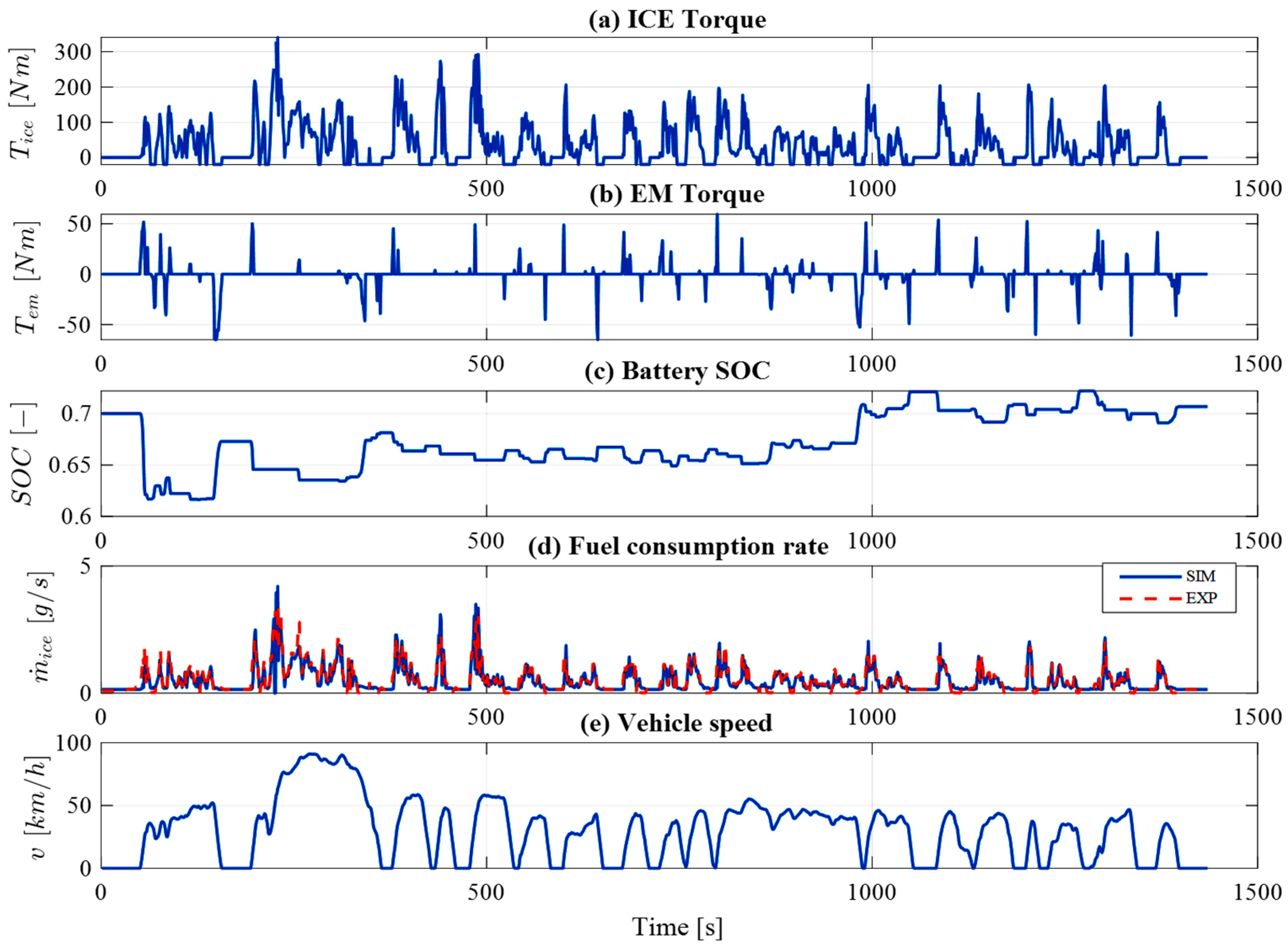
4.4. Simulation Results for P2 HEV
Once the simulation model was validated experimentally, the simulation was performed with the P2 HEV (with 14s6p battery pack) complete simulation model on different driving cycles (UDDS, NEDC and WLTC). As an example, the results for UDDS driving cycle with three levels of limitations are presented in
Figure 17,
Figure 18 and
Figure 19. The figures represent (a) ICE torque, (b) EM torque, (c) the battery SOC, (d) fuel consumption rate and (e) the speed profile on UDDS driving cycle. Note that here, results are shown for when the C0 clutch was engaged during the declaration phase, which means that regenerative braking will be affected by the resistive torque of the engine. In all the cases, the SOC was maintained at the beginning and at the end of driving cycle. For this reason, the initial SOC was varied in different cases to ensure the electrical energy equilibrium. The overall fuel efficiency was improved by 8.6% compared to conventional vehicle simulation results (699.9 g) in the case where no thermal limitations are applied (
Figure 17). However, the temperature of the battery reached about 160 °C (see
Figure 19a solid blue line) under UDDS cycle.
In
Figure 18, results are described for ECMS with thermal limitation implemented by means of an on/off penalty factor (discussed in Equation (22)). In this case, the overall fuel consumption was reduced by only 3.8% compared to the conventional vehicle model (699.9 gr). Since, traction power contribution by EM is possible only if battery temperature is below 55 °C (see
Figure 19a).
With the penalty factors on both the temperature
and the temperature change rate
(discussed in Equations (24)–(27)), the battery temperature was kept below 55 °C (see
Figure 20a), and overall fuel usage was improved by 4.8% with respect to conventional vehicle model as in
Figure 19.
The temperature profile of the battery for UDDS, NEDC and WLTC driving cycles are given in
Figure 20. For the case with no thermal limitations (blue, solid lines), the more aggressive cycles such as UDDS and WLTC have higher power demand, therefore, the temperature of the battery went up to 160 °C and 180 °C (
Figure 20a,c), respectively. The temperature for the low power demanding NEDC cycle stayed within 85 °C (
Figure 20b).
The case with limitation on both temperature and temperature change rate (yellow, dotted line) showed more stable the battery temperature profile compared to the on/off temperature limitation (orange, dashed line) strategy. The reason is that introducing penalty factor due to the temperature changing rate , which limits the rapid changes in the battery temperature. Moreover, in three driving cycles (UDDS, NEDC, and WLTC) this limitation led to fuel consumption improvement of 1%, 0.3% and 0.7%, respectively, compared to the on/off strategy.
As can be seen, the introduction of the thermal limitation positively affects the thermal behaviour that helps to avoid the thermal runaway. However, fuel economy is negatively affected, as the use of electric traction is limited as well.
Therefore, it would be reasonable to define the minimum capacity of the battery that allows avoiding thermal runaway without introducing the thermal limitation on the control strategy.
4.5. Increased Battery Size to Avoid Temperature Limits (14s12p)
To reduce the fuel consumption of the vehicle while keeping the thermal condition of the battery within the optimal range, the battery pack capacity was doubled. Since an increase of the number of parallel cells results in a decrease of the current per cell, this should affect positively the battery thermal behavior. Therefore, the number of parallel cells was gradually increased (using integer numbers only) from 14s6p to obtain a 14s12p configuration. The profile of the different variables over the WLTC cycle is shown in
Figure 21.
The results show (
Figure 22) that starting from a 14s12p configuration the battery temperature stays within the optimal range, even in the most aggressive cycle considered in the study. The results for this configuration are 50 °C, 37 °C and 61 °C in the UDDS, NEDC and WLTC cycles, respectively. The fuel consumption and its percentage reduction (in brackets) relative to the conventional vehicle are as follows: 611.4 g (−12.6%), 544 g (−8.2%) and 1185 g (−9.4%), for the UDDS, NEDC and WLTC driving cycles, respectively.



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}