
Analysis and Design of a Leading Edge with Morphing Capabilities for the Wing of a Regional Aircraft—Gapless Chord- and Camber-Increase for High-Lift Performance


 , , and
, , and
Abstract
1. Introduction
- Aerodynamic performance;
- deformation capability of the skin material;
- structural integrity including fatigue and impact loading;
- actuation concept;
- low structural weight;
- mounting concept.
2. CFD Analysis
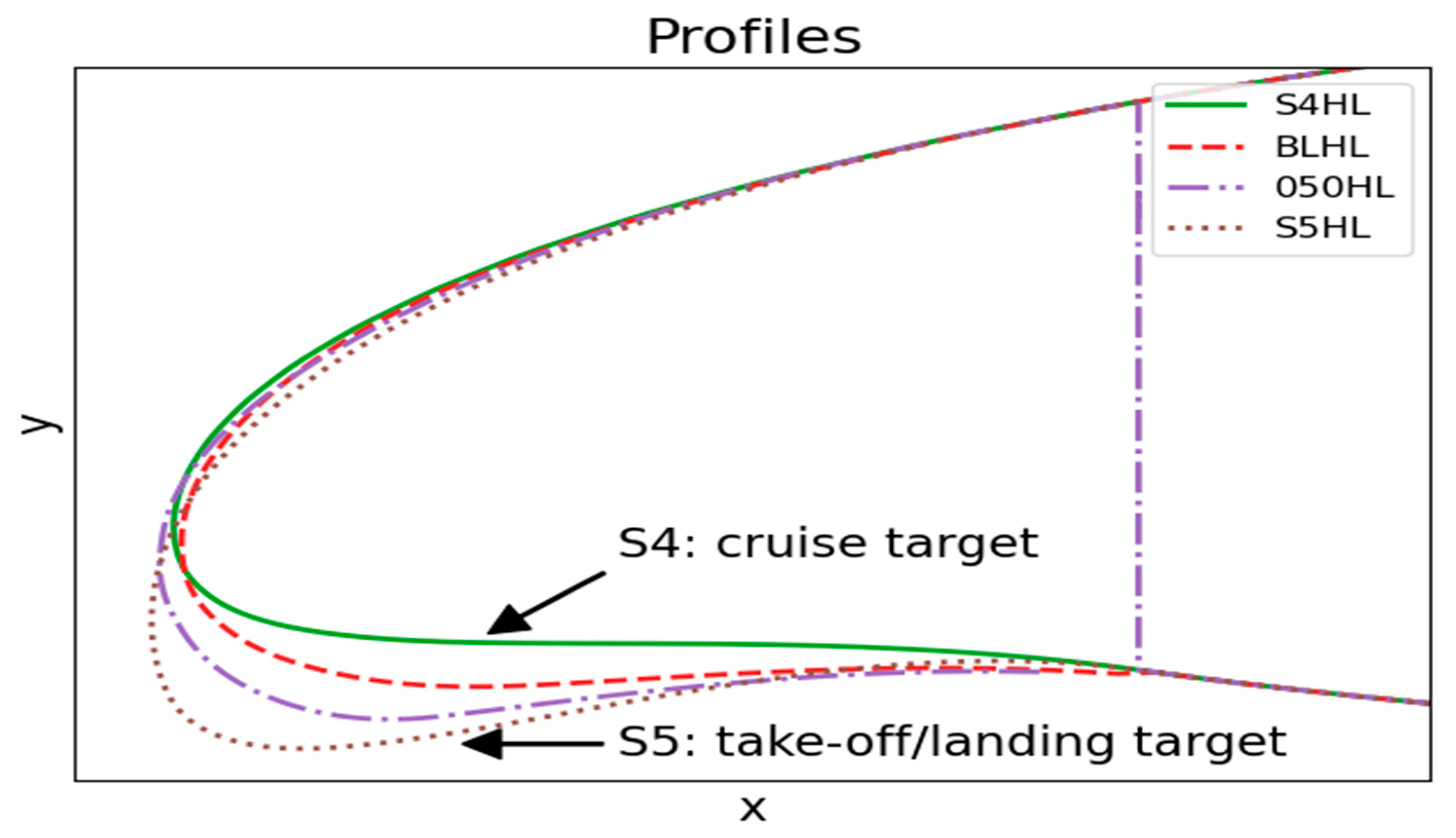
2.1. Analysed Airfoils of the Morphing Wing
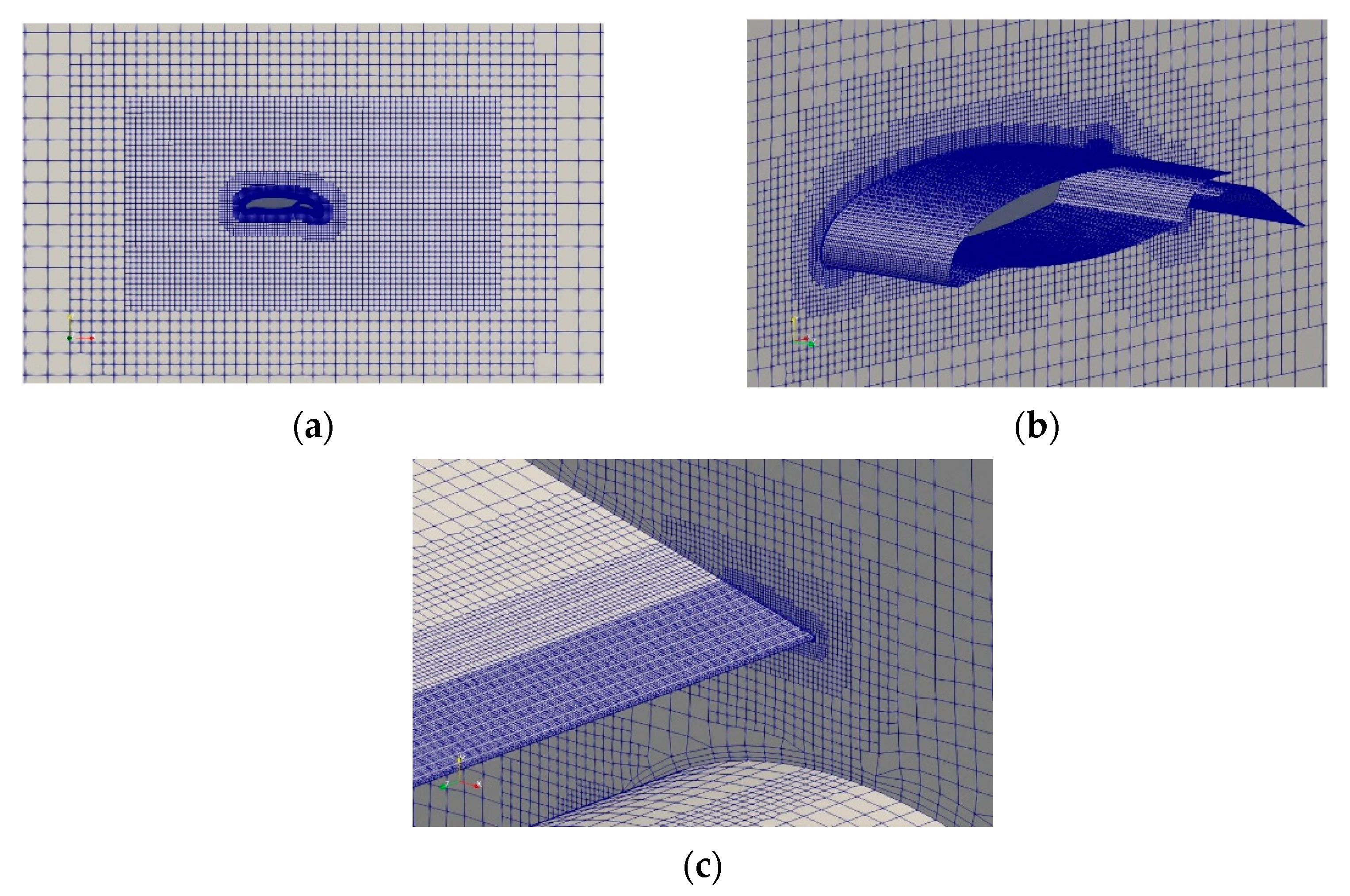
2.2. Details of CFD Analysis
2.3. Analysis of Lift and Drag
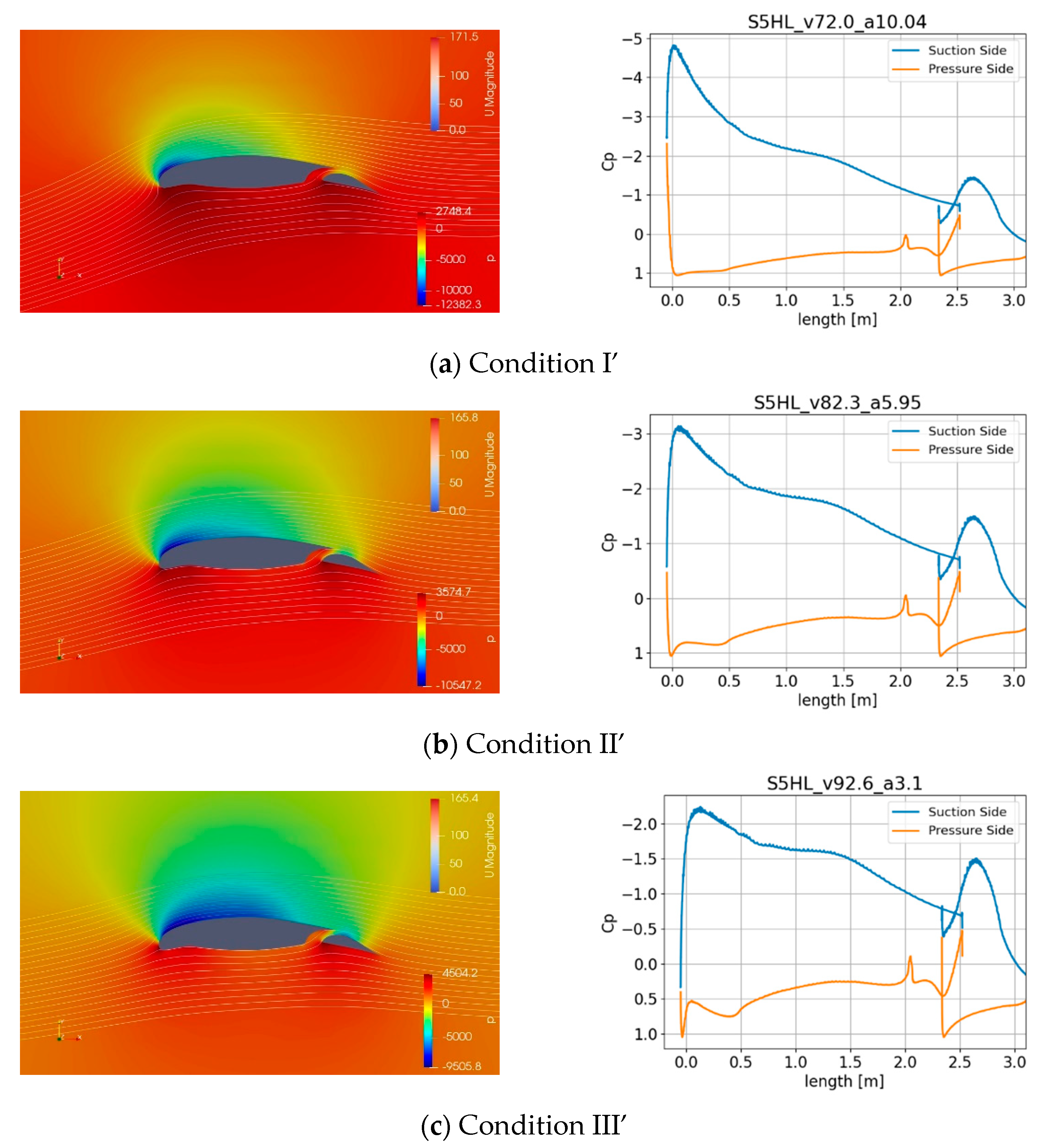
2.4. Analysis of Pressure, Flow, and cp Distributions
3. Design of the Skin and the Stringers
3.1. Material Selection and Design of the Skin
3.2. Selection and Design of the Stringers
4. Actuation System
4.1. Definition of an Intermediate Baseline Shape
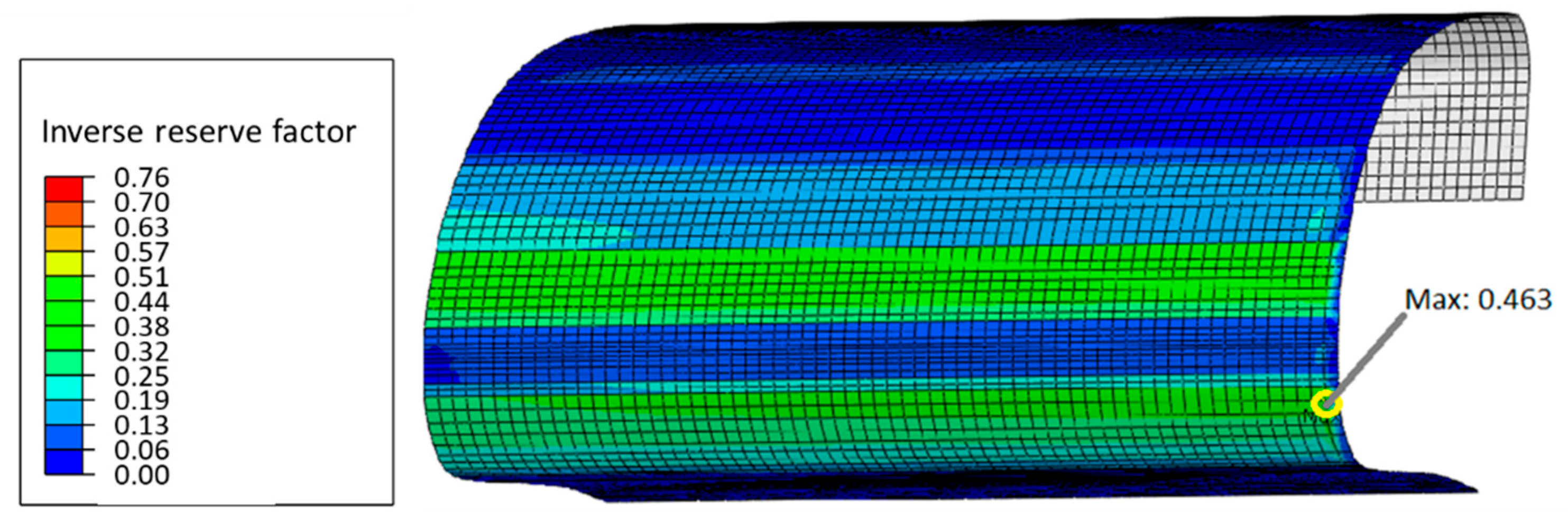
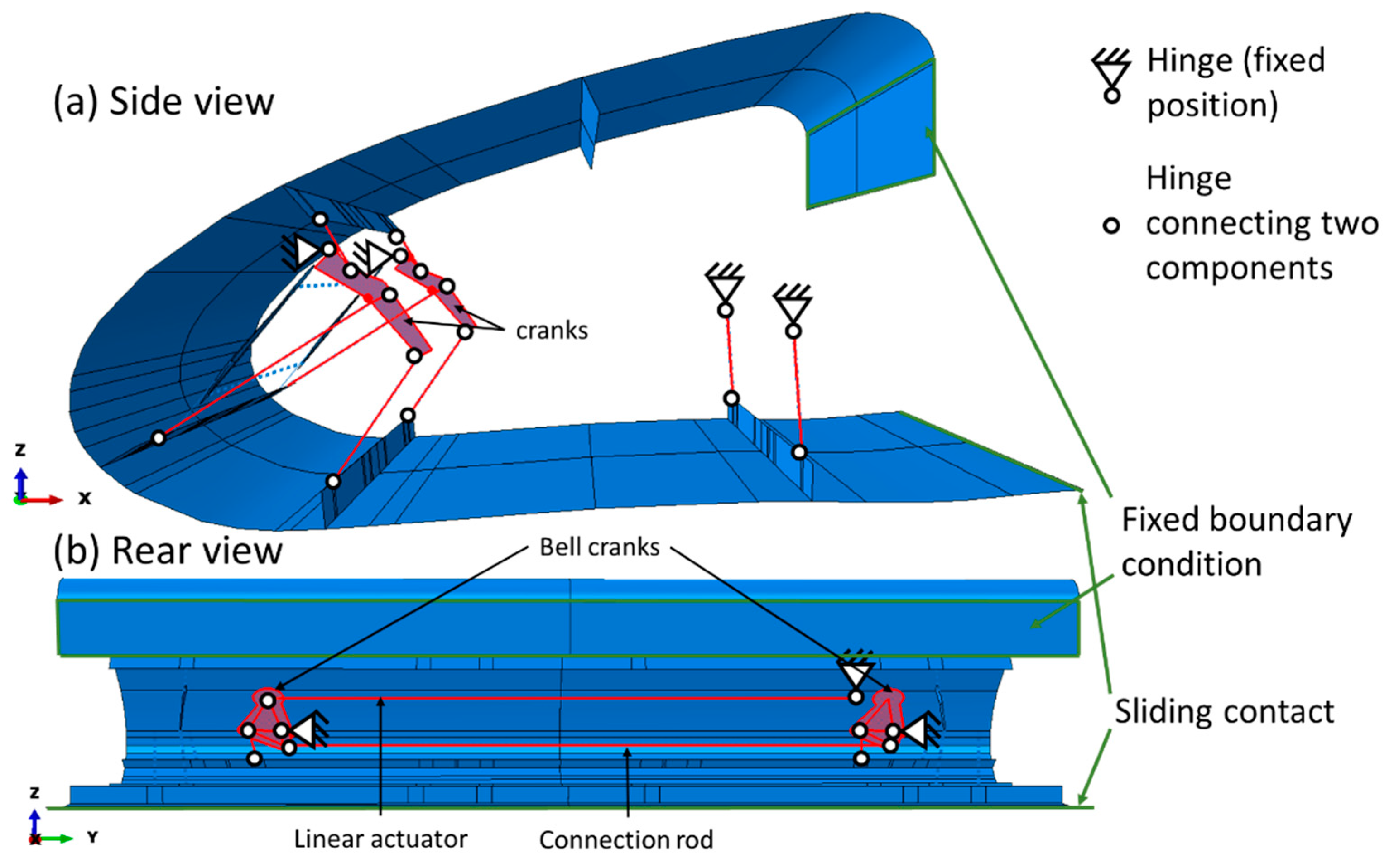
4.2. Finite Element Modeling of the Actuation System
- The initial condition “0” corresponds to the unloaded MLE in the stress-free manufacturing shape, which is depicted in Figure 15.
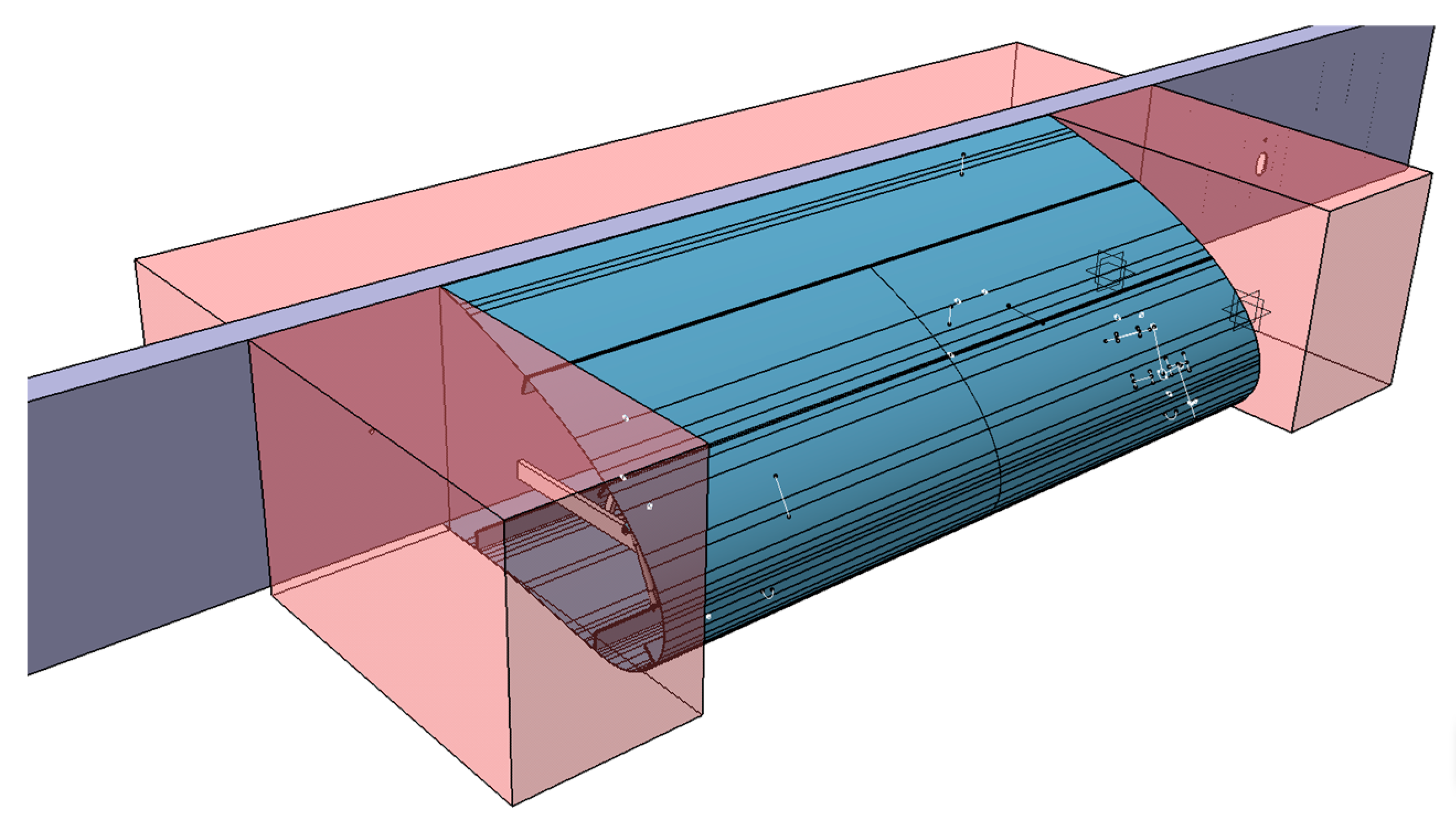
- Step no. 1 corresponds to the installation of the MLE to the wing. While installing the MLE, the sliding surface for the gap closure is prestressed by pushing it up against the bottom wing contour (see Section 6). For all subsequent steps, the rear bottom edge of the MLE slides on this contour. The prestressing of this sliding contact is maintained for all subsequent steps.
- Steps no. 2 and 3 correspond to a test of the MLE on the ground without pressure loads. In step no. 2, the MLE is deformed into cruise aerofoil S4 without pressure loads.
- In step no. 3, the MLE is deformed into the position for take-off and landing S5, still without pressure loads.
- In step no. 4, pressure loads are applied assuming that now the plane takes off with MLE remaining in position S5 (Case S5 I in Table 3). As shown in the results of CFD analyses (Section 2.4), the highest pressure loads at the MLE occur for the flight conditions with retracted flap. This may partly be due to the fact that a higher AoA is allowed with retracted flaps. In Section 2.4, it is also shown that the highest pressure loads at the MLE occur at the highest allowed AoA. Hence, the flight condition with the highest AoA, the highest true air speed at that AoA and with retracted flaps is used as the most critical case in position S5.
- In step no. 5, the MLE is morphed to position S4, whereas the air speed and the AoA remain constant (Case S4 I in Table 3). The results shown in Table 3 show that the pressure load on the MLE is even higher for S4 than for S5 in that flight condition. Even though it is not intended to use aerofoil S4 at high AoA, this flight condition is included into the load cycle, because it is the most critical one. Not dimensioning for it would mean adding constraints to the acceptable flight envelope depending on the MLE position.
- Case S5 IV (aerofoil S5 with low AoA and high true air speed) in Table 3 is not considered as a critical load case. The computed suction peak value is the highest one, but it occurs at the bottom, whereas the highest suction for all other cases occurs on the upper surface of the MLE. Suction at the bottom for aerofoil S5 reduces forces on the actuation system because the aerodynamic pressure loads act in the same direction as the deformation enforced by the actuation system.
- In step no. 6, aerofoil S4 is maintained, but the pressure loads are modified in order to correspond to cruise condition with reduced AoA and increased air speed.
- A load cycle corresponding to one flight consists of steps no. 1 to 6 and then repeating the load conditions 5, 4, and 3 in reversed order.
5. Fatigue Tests
6. Gap Closure
7. Mountability Concept
7.1. System Boundaries
7.2. Mounting Concept
8. Bird Strike
9. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Karakalas, A.A.; Lagoudas, D.C. Preliminary Design and Preliminary Design and Numerical Investigation of SMA Torsion Tubes for the Actuation of Articulated Adaptive Panels. ARC 2021. [Google Scholar] [CrossRef]
- Machairas, T.; Solomou, A.; Saravanos, D. A morphing chevron actuated by shape memory alloy wires for noise reduction. In Proceedings of the Greener Aviation: Clean Sky Breakthroughs and Worldwide Status, Brussels, Belgium, 12–14 March 2014. [Google Scholar]
- ACARE Advisory Council for Aviation Research and Innovation in Europa. FlightPath2050 Goals. Available online: https://www.acare4europe.org/sria/flightpath-2050-goals/protecting-environment-and-energy-supply-0 (accessed on 20 January 2021).
- Sinapius, M.; Monner, H.P.; Kintscher, M.; Riemenschneider, J. DLR’s Morphing Wing Activities within the European Network. In Mechanics for the World, Procedia IUTAM 10 (2014), Proceedings of the 23rd International Congress of Theoretical and Applied Mechanics, Beijing, China, 9–24 August 2012; ICTAM2012, S. 416–426; Elsevier: Amsterdam, The Netherlands, 2014. [Google Scholar] [CrossRef]
- Morishima, R. Analysis of Composite Wing Structures with A Morphing Leading Edge. Ph.D. Thesis, Cranfield University, Bedford, UK, 2011. Available online: http://dspace.lib.cranfield.ac.uk/handle/1826/6797 (accessed on 16 March 2021).
- Monner, H.P.; Kintscher, M.; Lorkowski, T.; Storm, S. Design of a Smart Droop Nose as Leading Edge High-Lift System for Transportation Aircrafts. In Proceedings of the 50th AIAA/ASME/ASCE/AHS/ASC Structures, Structural Dynamics, and Materials Conference, Palm Springs, CA, USA, 4–7 May 2009. Article ID AIAA 2009-2128. [Google Scholar] [CrossRef]
- Colletti, C.R.; Ansell, P.J. Design of an Airfoil Morphing Leading Edge for High-Lift Applications using a Genetic Algorithm. In Proceedings of the AIAA SciTech 2021 Forum, Nashville, TN, USA, 1–15 & 19–21 January 2021. [Google Scholar] [CrossRef]
- Ameduri, S. Morphing of the Leading Edge. In Morphing Wing Technologies; Butterworth-Heimann: Oxford, UK, 2018; pp. 491–515. [Google Scholar] [CrossRef]
- Communier, D.; Le Besnerais, F.; Botez, R.M.; Wong, T. Design, Manufacturing and testing of a New Concept for a Morphing Leading Edge using a Subsonic Blow Down Wind Tunnel. Biomimetics 2019, 4, 76. [Google Scholar] [CrossRef] [PubMed]
- Kintscher, M.; Monner, H.P.; Heintze, O. Experimental Testing of a Smart Leading Edge High Lift Device For Commerical Transportation Aircrafts. In Proceedings of the 27th International Congress on the Aeronautical Sciences, Nice, France, 19–24 September 2010; ISBN 978-0-9565333-0-2. [Google Scholar]
- Peel, L.D.; Meija, J.; Narvaez, B.; Thompson, K.; Lingala, M. Development of a Simple Morphing Wing using Elastomeric Composite Skins and Actuators. In Proceedings of the SMASIS08—ASME Conference on Smart Materials, Adaptive Structures and Intelligent Systems, Ellicott City, MD, USA, 28–30 October 2008. [Google Scholar] [CrossRef]
- Geier, S.; Kintscher, M.; Mahrholz, T.; Wierach, P.; Monner, H.-P.; Wiedemann, M. Characterization of multi-functoinal skin-material for morphing leading-edge applications. In Active and Passive Smart Structures and Integrated Systems 2013; Active and Passive Smart Structures and Integrated Systems; International Society for Optics and Photonics: Washington, DC, USA, 2013; p. 868818. [Google Scholar] [CrossRef]
- Essa, Y.; Martin de la Escalera Cutillas, F.; Dimino, I.; Ciminello, M.; Concilio, A. Manufacturing and testing of Smart Morphing SARISTU Trailing Edge. In Smart Intelligent Aircraft Structures (SARISTU), Proceedings of the Final Project Conference, Moscow, Russia, 19–21 May 2015; Wölcken, P., Papadopoulos, M., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 199–215. [Google Scholar] [CrossRef]
- Wildscheck, A.; Storm, S.; Herring, M.; Drezga, D.; Korian, V.; Roock, O. Design, Optimization, testing, verification, and Validation of the Wingtip Active Trailing Edge. In Smart Intelligent Aircraft Structures (SARISTU), Proceedings of the Final Project Conference, Moscow, Russia, 19–21 May 2015; Wölcken, P., Papadopoulos, M., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 219–255. [Google Scholar] [CrossRef]
- Drezga, D.; Korian, V.; Roock, O.; Lopez, B.; Fiedler, A.; Storm, S.; Snop, V. Winglet Design, Manufacturing, and Testing. In Smart Intelligent Aircraft Structures (SARISTU), Proceedings of the Final Project Conference, Moscow, Russia, 19–21 May 2015; Wölcken, P., Papadopoulos, M., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 257–273. [Google Scholar] [CrossRef]
- Heintze, O.; Steeger, S.; Falken, A.; Heckmann, J. Enhanced Adaptive Droops Nose—from Computer Model to Multi-functional Integrated Part. In Smart Intelligent Aircraft Structures (SARISTU), Proceedings of the Final Project Conference, Moscow, Russia, 19–21 May 2015; Wölcken, P., Papadopoulos, M., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 97–111. [Google Scholar] [CrossRef]
- Kintscher, M.; Kirn, J.; Storm, S.; Peter, F. Assessment of the SARISTU Enhanced Adaptive Droop Nose. In Smart Intelligent Aircraft Structures (SARISTU), Proceedings of the Final Project Conference, Moscow, Russia, 19–21 May 2015; Wölcken, P., Papadopoulos, M., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 113–140. [Google Scholar] [CrossRef]
- Evenblij, R.; Kong, F.; Koimtzuglou, C.; Ciminello, M.; Dimino, I.; Concilio, A. A Shape Sensing for Morphing Structures Using Fiber Bragg Grating Technology. In Smart Intelligent Aircraft Structures (SARISTU), Proceedings of the Final Project Conference; Wölcken, P., Papadopoulos, M., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 471–491. [Google Scholar] [CrossRef]
- Ma, Z.; Chen, X. Fiber Bragg Grating Sensors for Aircraft Wing Measurement: Recent Applications and Technical Analysis. Sensors 2018, 19, 55. [Google Scholar] [CrossRef] [PubMed]
- Święch, Ł. Calibration of a Load Measurement System for an Unmanned Aircraft Composite Wing Based on Fibre Bragg Gratings and Electrical Strain Gauges. Aerospace 2020, 7, 27. [Google Scholar] [CrossRef]
- Airoldi, A.; Sala, G.; Evenblij, R.; Koimtzoglou, C.; Loutas, T.; Carossa, G.M.; Mastromauro, P.; Kanakis, T. Load Monitoring by Means of Optical Fibres and Strain Gages. In Smart Intelligent Aircraft Structures (SARISTU), Proceedings of the Final Project Conference, Moscow, Russia, 19–21 May 2015; Wölcken, P., Papadopoulos, M., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 433–469. [Google Scholar] [CrossRef]
- Sodja, J.; Martinez, M.J.; Simpson, J.C.; De Breuker, R. Experimental evaluation of a morphing leading edge concept. J. Intell. Mater. Syst. Struct. 2019, 30, 2953–2969. [Google Scholar] [CrossRef]
- Vasista, S.; Riemenschneider, J.; Keimer, R.; Monner, H.P.; Nolte, F.; Horst, P. Morphing Wing Droop Nose with Large Deformation: Ground Tests and Lessons Learned. Aerospace 2019, 6, 111. [Google Scholar] [CrossRef]
- Ameduri, S. A SMA based Morphing Leading edge Architecture. Adv. Mater. Res. 2014, 1016, 383–388. [Google Scholar] [CrossRef]
- Contell Asins, C.; Landersheim, V.; Schwarzhaupt, O. Development, manufacturing and testing of a 1:1 smart morphing leading edge demonstrator. In Proceedings of the Greener Aviation 2016, Brussels, Belgium, 11–13 October 2016. paper ID 137. [Google Scholar]
- Thuwis, G.A.A.; Abdalla, M.; Gürdal, Z. Optimization of a variable-stiffness skin for morphing high-lift devices. Smart Mater. Struct. 2010, 19, 124010. [Google Scholar] [CrossRef]
- De Gaspari, A.; Cavalieri, A.; Ricci, S. Advanced Design of a Full-Scale Active Morphing Droop Nose. Int. J. Aerosp. Eng. 2020. [Google Scholar] [CrossRef]
- Contell Asins, C.; Landersheim, V.; Wacker, J.-D.; Adachi, S.; Arnold-Keifer, S.; May, M. Design of a Morphing Leading Edge for Use as a High Lift Device for A Regional Aircraft. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1024, 012033. [Google Scholar] [CrossRef]
- Menter, F.R. Two-equation eddy-viscosity turbulence models for engineering applications. AIAA J. 1994, 32, 1598–1605. [Google Scholar] [CrossRef]
- Puck, A. Festigkeitsanalyse von Faser-Matrix-Laminaten—Modelle für die Praxis; Carl Hanser Verlag: München, Germany; Wien, Austria, 1996. [Google Scholar]
- Barbarino, S.; Saavedra Flores, E.I.; Ajaj, R.M.; Dayyani, I.; Friswell, M.I. A review on shape memory alloys with applications to morphing aircraft. Smart Mater. Struct. 2014, 23, 063001. [Google Scholar] [CrossRef]
- Henry, A.C.; Molinari, G.; Rivas-Padilla, J.R.; Arrieta, A.F. Smart Morphing Wing: Optimization of Distributed Piezoelectric Actuation. AIAA J. 2019, 56. [Google Scholar] [CrossRef]
- Mazzoleni, M.; Maccarana, Y.; Previdi, F.; Pispola, G.; Nardi, M.; Perni, F.; Toro, S. Development of a reliable electro-mechanical actuator for primary control surfaces in small aircrafts. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017. [Google Scholar] [CrossRef]
- Wheeler, P.; Bozhko, S. The More Electric Aircraft: Technology and challenges. IEEE Electrif. Mag. 2014, 2, 6–12. [Google Scholar] [CrossRef]
- Marlett, K. Hexcel 8552 IM7 Unidirectional Prepreg 190 gsm & 35%RC Qualification Material Data Report. NCAMP Test Report Number: CAM RP-2009-015 Rev A, 22 April 2011. Available online: https://www.niar.wichita.edu/coe/ncamp_documents/Hexcel%208552/CAM-RP-2009-015%20Rev%20A%20April%2022%202011%20Hexcel%208552%20IM7%20Uni%20Data%20Report.pdf (accessed on 16 March 2021).
- European Union Aviation Safety Agency (EASA). Certification Specification and Acceptable Means of Compliance for Large Aeroplanes CS-25, Amendment 25; European Union Aviation Safety Agency (EASA): Cologne, Germany, 2020. [Google Scholar]
- Heimbs, S.; Nogueira, A.; Hombergsmeier, E.; May, M.; Wolfrum, J. Failure behavior of composite T-joints with novel metallic arrow-pin reinforcements. Compos. Struct. 2014, 110, 16–28. [Google Scholar] [CrossRef]
- May, M.; Ganzenmüller, G.C.; Wolfrum, J.; Heimbs, S. Analysis of composite T-joint designs for enhanced resistance to hydrodynamic ram. Compos. Struct. 2015, 125, 188–194. [Google Scholar] [CrossRef]
- May, M.; Arnold-Keifer, S.; Landersheim, V.; Laveuve, D.; Contell Asins, C.; Imbert, M. Bird Strike Resistance of a CFRP Morphing Leading Edge. Compos Part C 2021. [Google Scholar] [CrossRef]
- May, M.; Haase, T.; Leost, Y.; Wegmann, M.; Blacha, M. Bird strike analyses of RACER fast rotorcraft. In Proceedings of the AIAA 2019 SciTech Forum, San Diego, CA, USA, 7–11 January 2019. [Google Scholar] [CrossRef]
- May, M.; Arnold-Keifer, S.; Haase, T. Damage resistance of composite structures with unsymmetrical stacking sequence subjected to high velocity bird impact. Compos. Part. C 2020, 1. [Google Scholar] [CrossRef]
- Chary, C. Development and Validation of a Bird Strike Protection System for an Enhanced Adaptive Droop Nose. In Smart Intelligent Aircraft Structures (SARISTU), Proceedings of the Final Project Conference; Wölcken, P., Papadopoulos, M., Eds.; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 71–83. [Google Scholar] [CrossRef]
- Magrini, A.; Benini, E.; Ponza, R.; Wang, C.; Khodaparast, H.H.; Friswell, M.I.; Landersheim, V.; Laveuve, D.; Contell Asins, C. Comparison of Constrained Parameterisation Strategies for Aerodynamic Optimisation of Morphing Leading Edge Airfoil. Aerospace 2019, 6, 31. [Google Scholar] [CrossRef]
- Wang, C.; Khodaparast, H.H.; Friswell, M.I.; Magrini, A.; Ponza, R.; Benini, E.; Landersheim, V.; Laveuve, D.; Contell Asins, C. Conceptual-level Evaluation of a Variable Stiffness Skin for a Morphing Wing Leading Edge. J. Aerosp. Eng. 2019, 233, 5703–5716. [Google Scholar] [CrossRef]

































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Profiles | BLHL | S4HL | 050HL | S5HL |
|---|---|---|---|---|
| Max Lift Coeff. | 2.80 | 2.69 | 2.91 | 3.06 |
| Stall Angle/° | 14.2 | 13.2 | 15.0 | 16.4 |
| Conditions | For Cruise Profiles | For High-Lift Profiles | |||||
|---|---|---|---|---|---|---|---|
| I | II | III | IV | I′ | II′ | III′ | |
| Air Speed/(m/s) | 130.6 | 153.7 | 192.1 | 184.4 | 72.0 | 82.3 | 92.6 |
| Angle of Attack/° | 14.4 | 9.7 | 5.2 | 1.0 | 10.0 | 6.0 | 3.1 |
| Profile | Condition | Max Pressure Coefficient cp | Max Suction (kPa) |
|---|---|---|---|
| S4 | I | −4.53 | −21.2 |
| II | −2.51 | −16.3 | |
| III | −1.21 | −12.3 | |
| IV | −0.82 | −7.7 | |
| S5 | I | −3.57 | −16.7 |
| II | −2.22 | −14.4 | |
| III | −1.25 | −12.7 | |
| IV | −2.62 | −24.5 | |
| S4HL | I′ | −6.48 | −20.7 |
| II′ | −3.79 | −15.8 | |
| III′ | −2.45 | −12.9 | |
| S5HL | I′ | −4.82 | −15.4 |
| II′ | −3.14 | −13.1 | |
| III′ | −2.24 | −11.8 |
| No. | 0 | 1 | 2 | 3 | 4 | 5 | 6 |
|---|---|---|---|---|---|---|---|
| Geometry | Manu. | BL | S4 | S5 | S5 | S4 | S4 |
| Angle of Attack/° | 0 | 0 | 0 | 0 | 14.41 | 14.41 | 1 |
| True Air speed/(m/s) | 0 | 0 | 0 | 0 | 130.6 | 130.6 | 184.4 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Contell Asins, C.; Landersheim, V.; Laveuve, D.; Adachi, S.; May, M.; Wacker, J.-D.; Decker, J. Analysis and Design of a Leading Edge with Morphing Capabilities for the Wing of a Regional Aircraft—Gapless Chord- and Camber-Increase for High-Lift Performance. Appl. Sci. 2021, 11, 2752. https://doi.org/10.3390/app11062752
Contell Asins C, Landersheim V, Laveuve D, Adachi S, May M, Wacker J-D, Decker J. Analysis and Design of a Leading Edge with Morphing Capabilities for the Wing of a Regional Aircraft—Gapless Chord- and Camber-Increase for High-Lift Performance. Applied Sciences. 2021; 11(6):2752. https://doi.org/10.3390/app11062752
Chicago/Turabian StyleContell Asins, Conchin, Volker Landersheim, Dominik Laveuve, Seiji Adachi, Michael May, Jens-David Wacker, and Julia Decker. 2021. "Analysis and Design of a Leading Edge with Morphing Capabilities for the Wing of a Regional Aircraft—Gapless Chord- and Camber-Increase for High-Lift Performance" Applied Sciences 11, no. 6: 2752. https://doi.org/10.3390/app11062752
APA StyleContell Asins, C., Landersheim, V., Laveuve, D., Adachi, S., May, M., Wacker, J.-D., & Decker, J. (2021). Analysis and Design of a Leading Edge with Morphing Capabilities for the Wing of a Regional Aircraft—Gapless Chord- and Camber-Increase for High-Lift Performance. Applied Sciences, 11(6), 2752. https://doi.org/10.3390/app11062752