
Seismic Ground Response Prediction Based on Multilayer Perceptron


Abstract
1. Introduction
2. Analytical Methods and Dataset
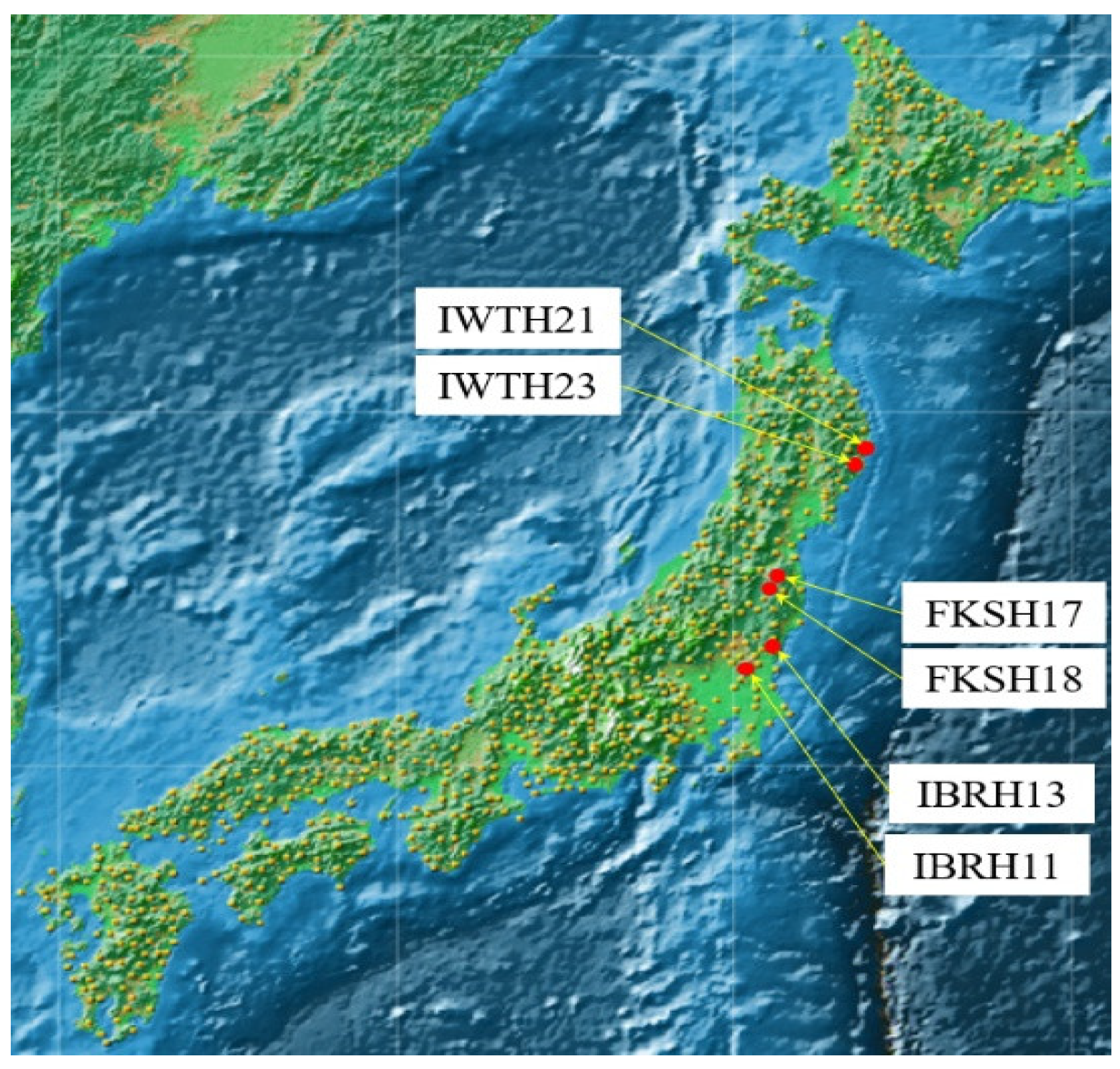
2.1. Earthquake Dataset
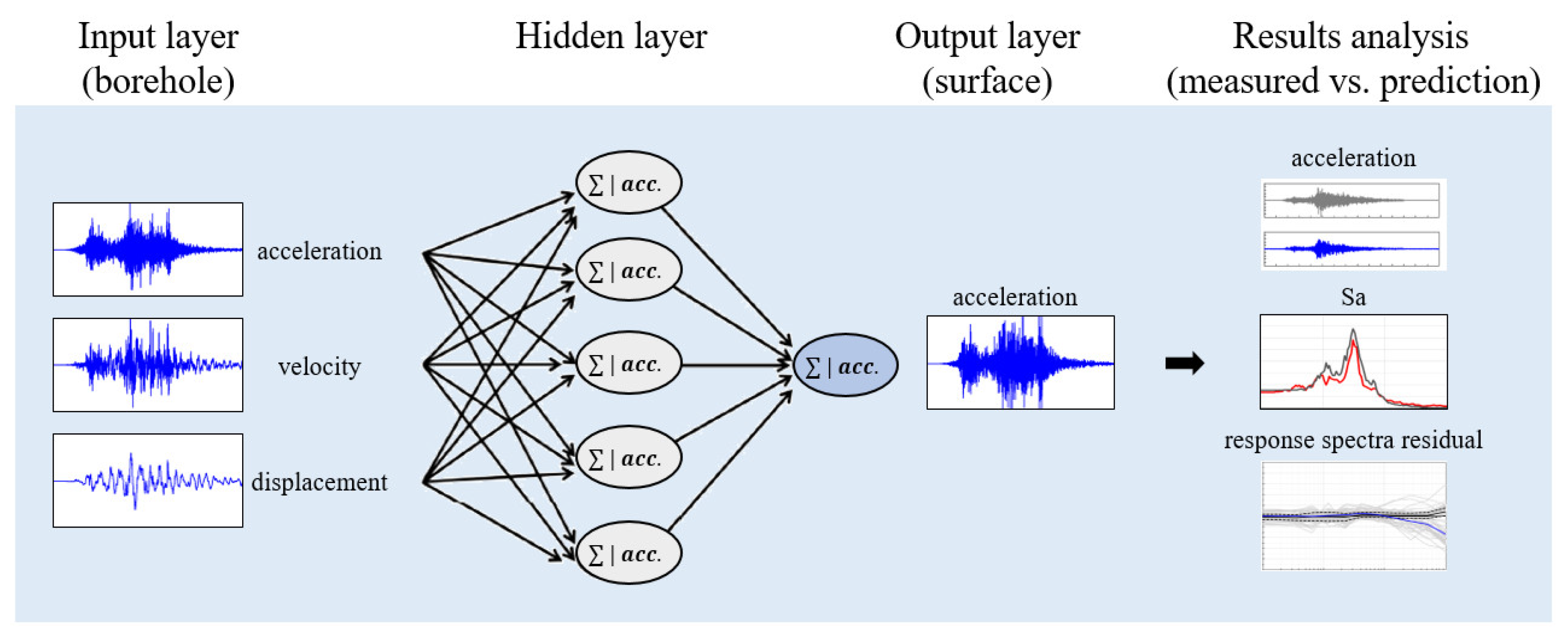
2.2. Multilayer Perceptron (MLP) Model
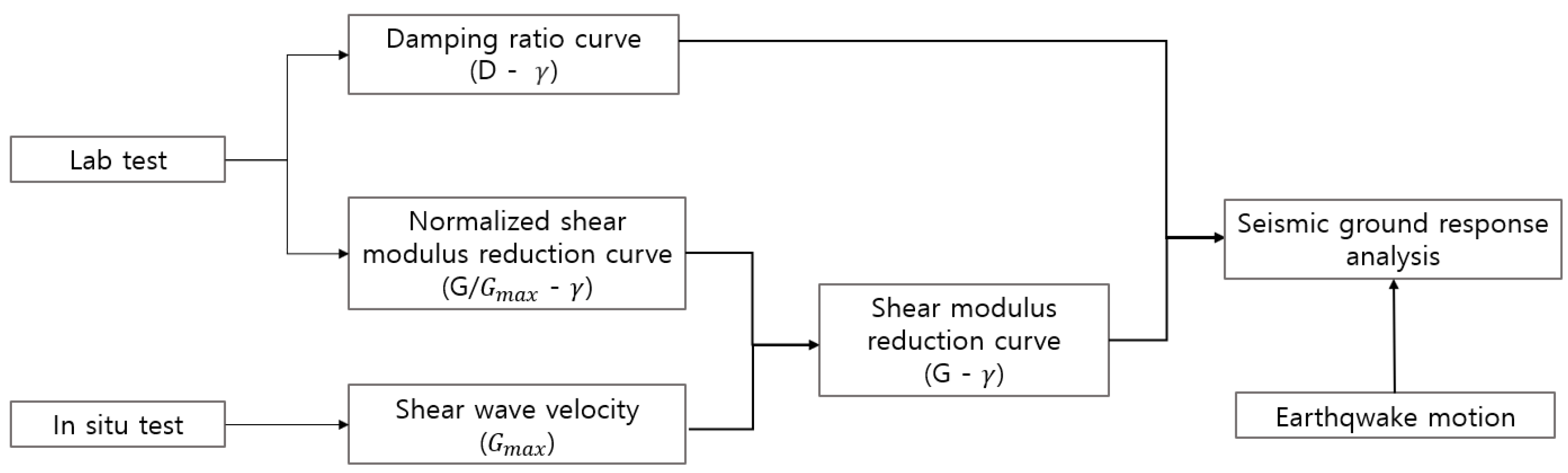
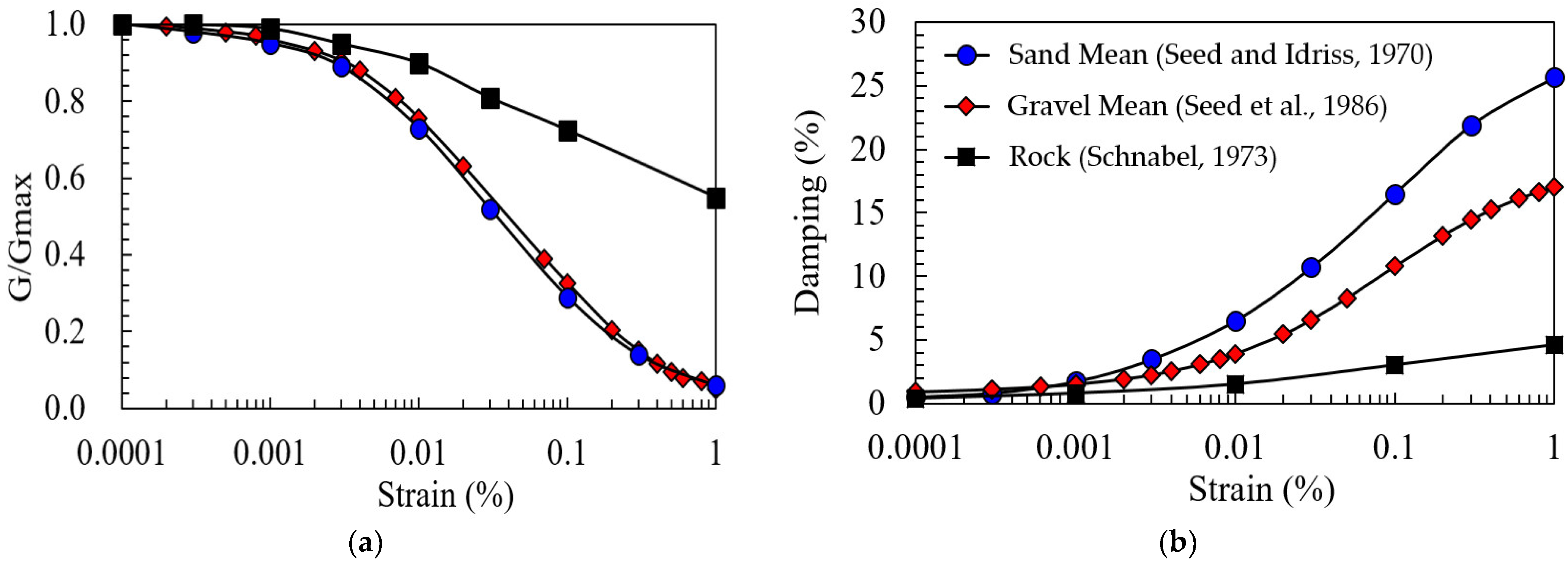
2.3. Conventional Model
3. Seismic Responses from MLP and Conventional Models
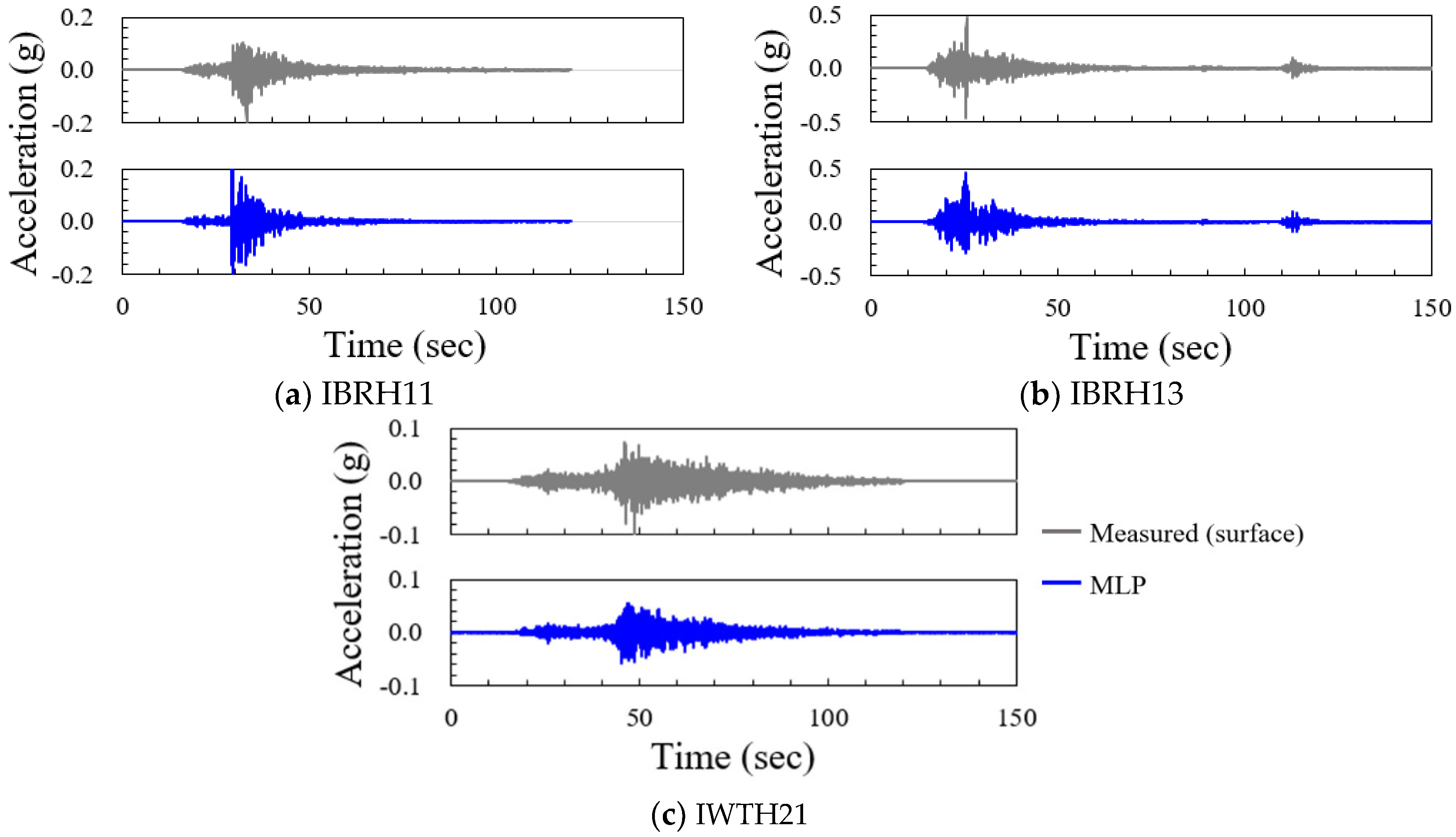
3.1. Acceleration Histories
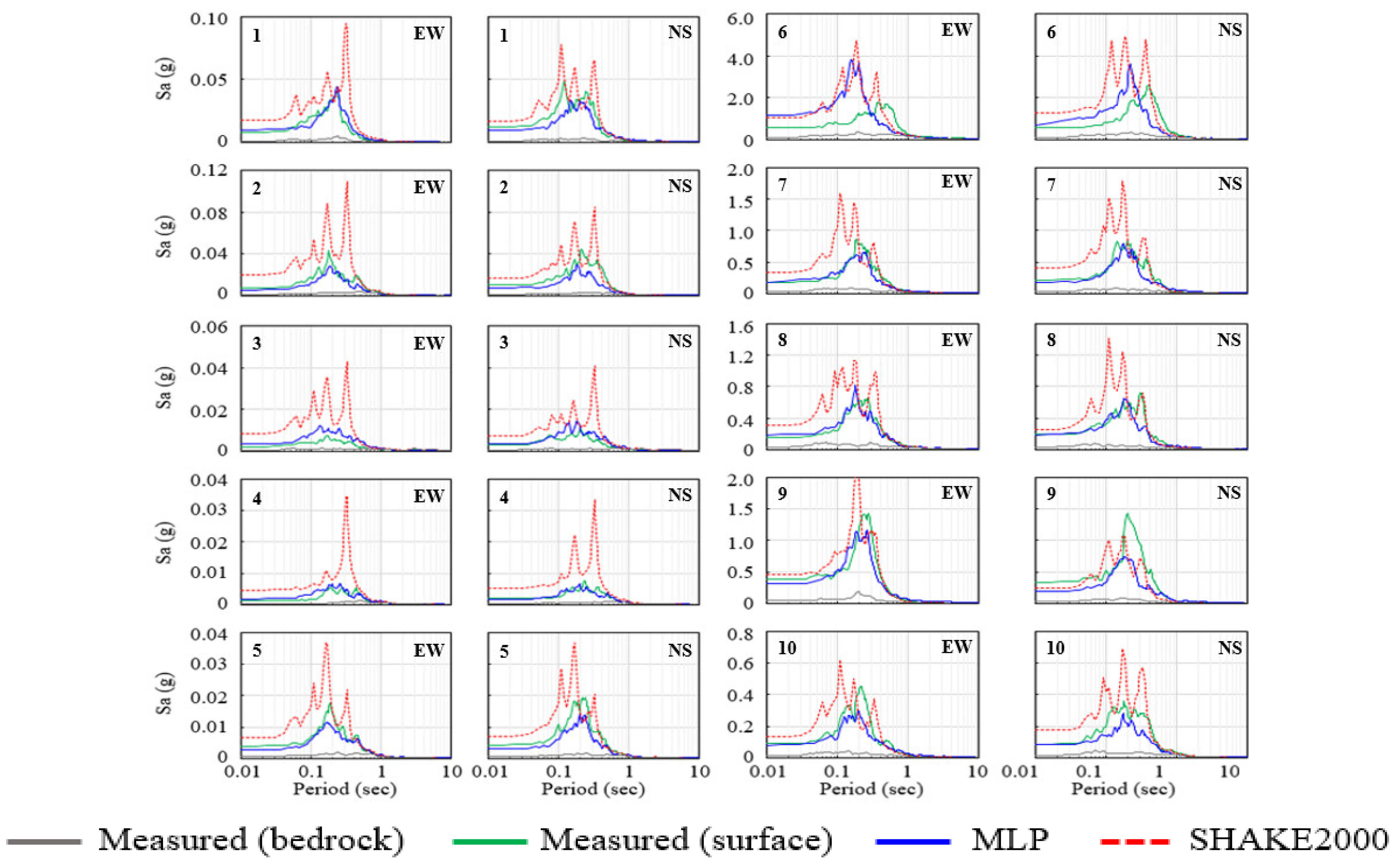
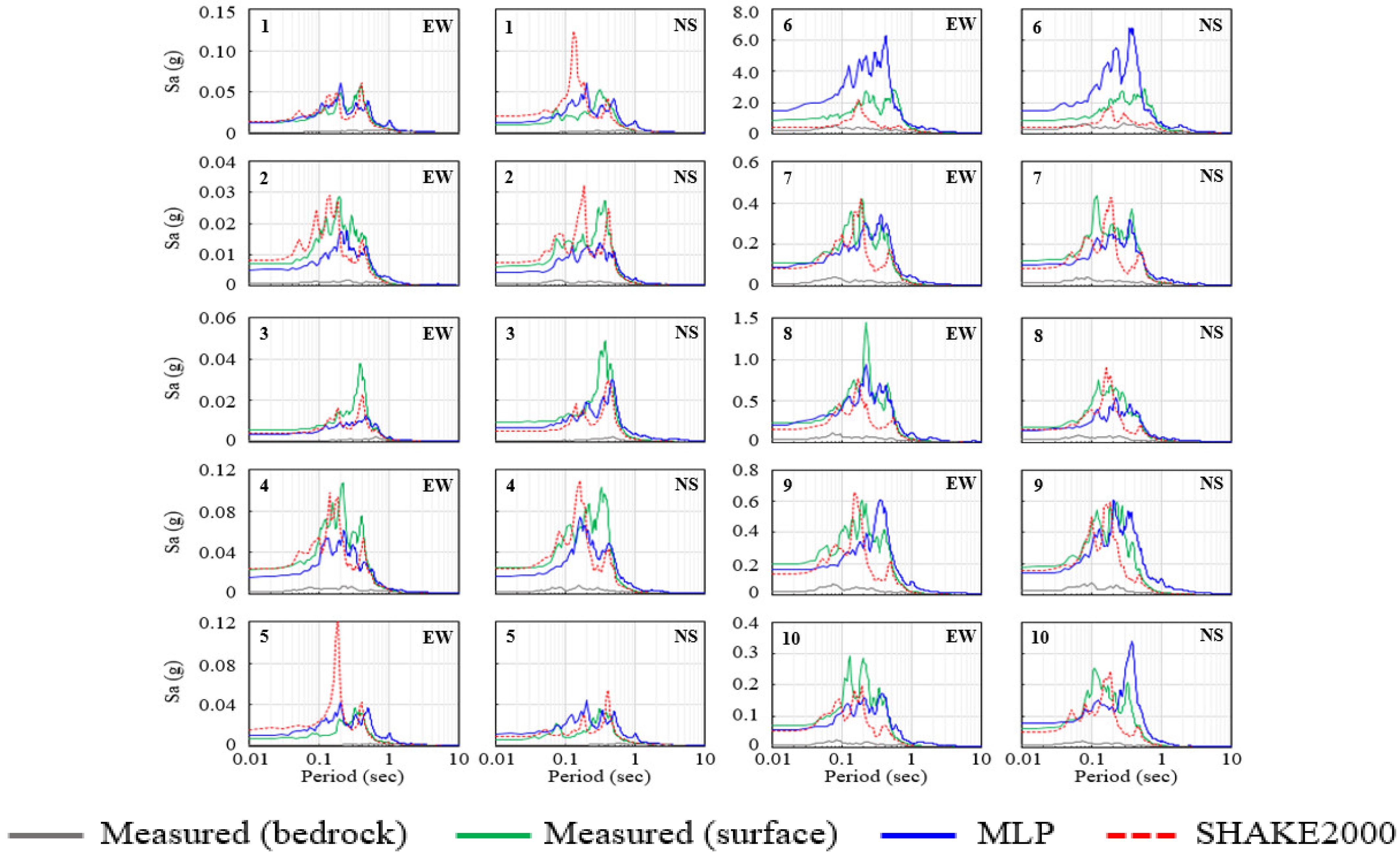
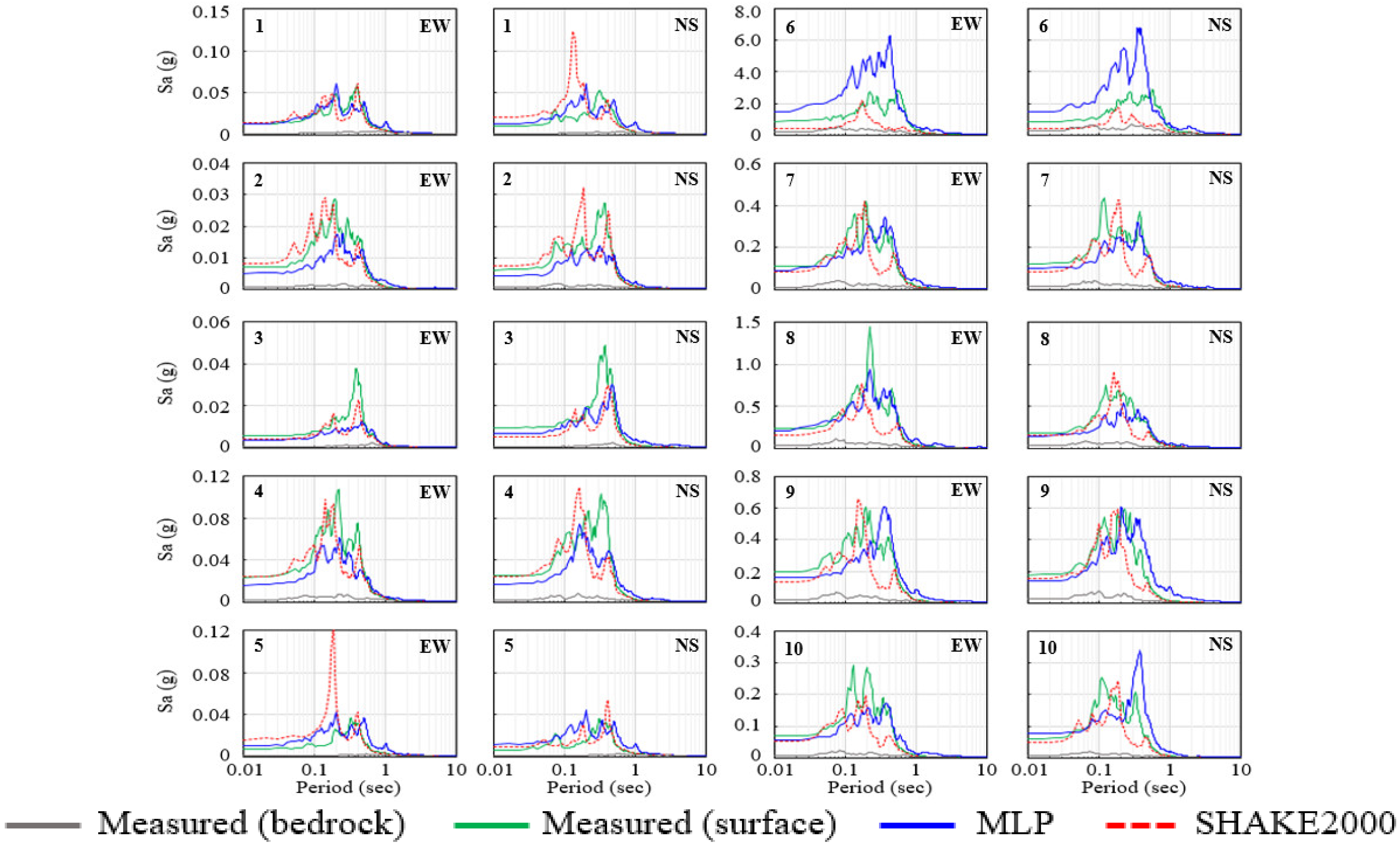
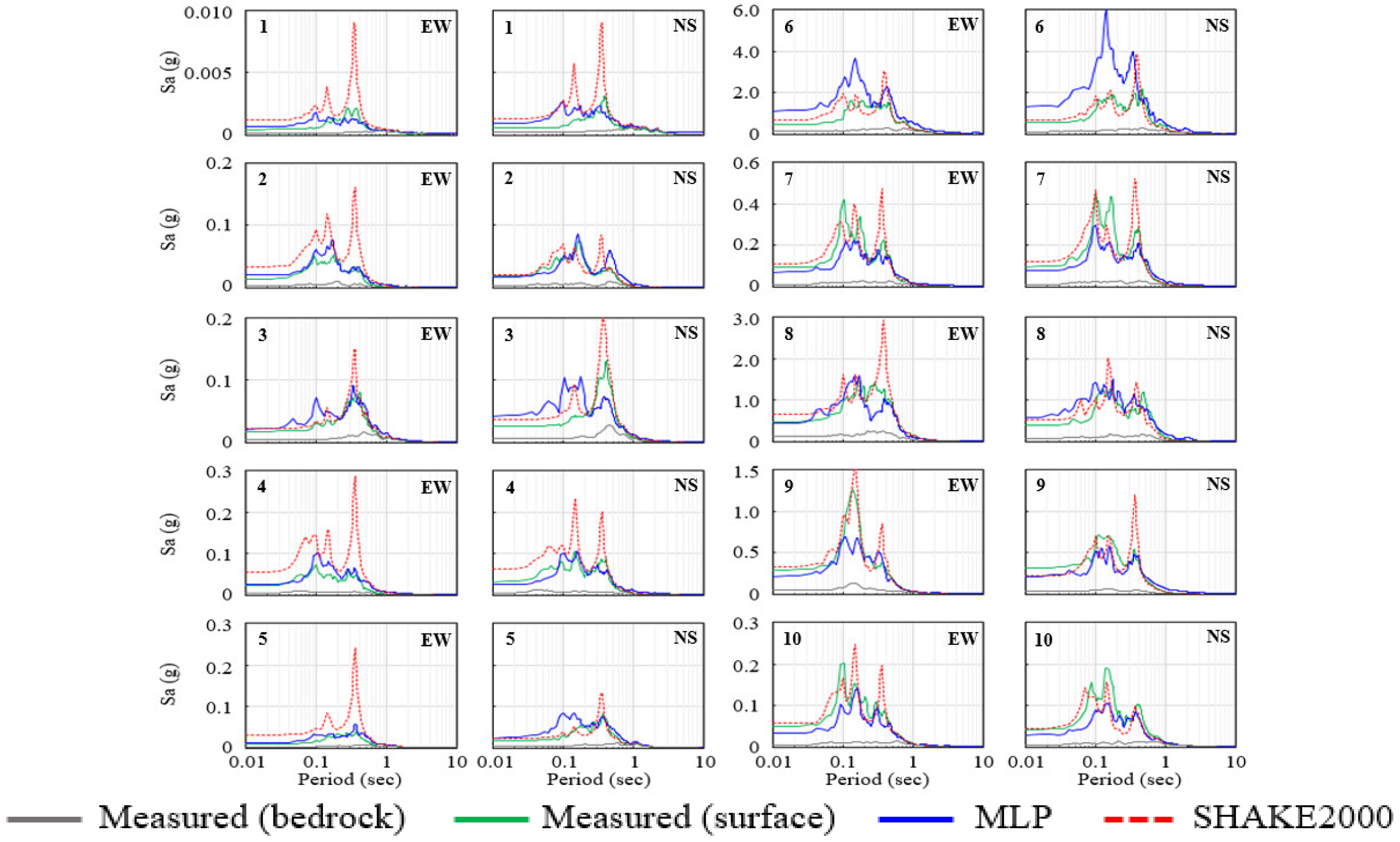
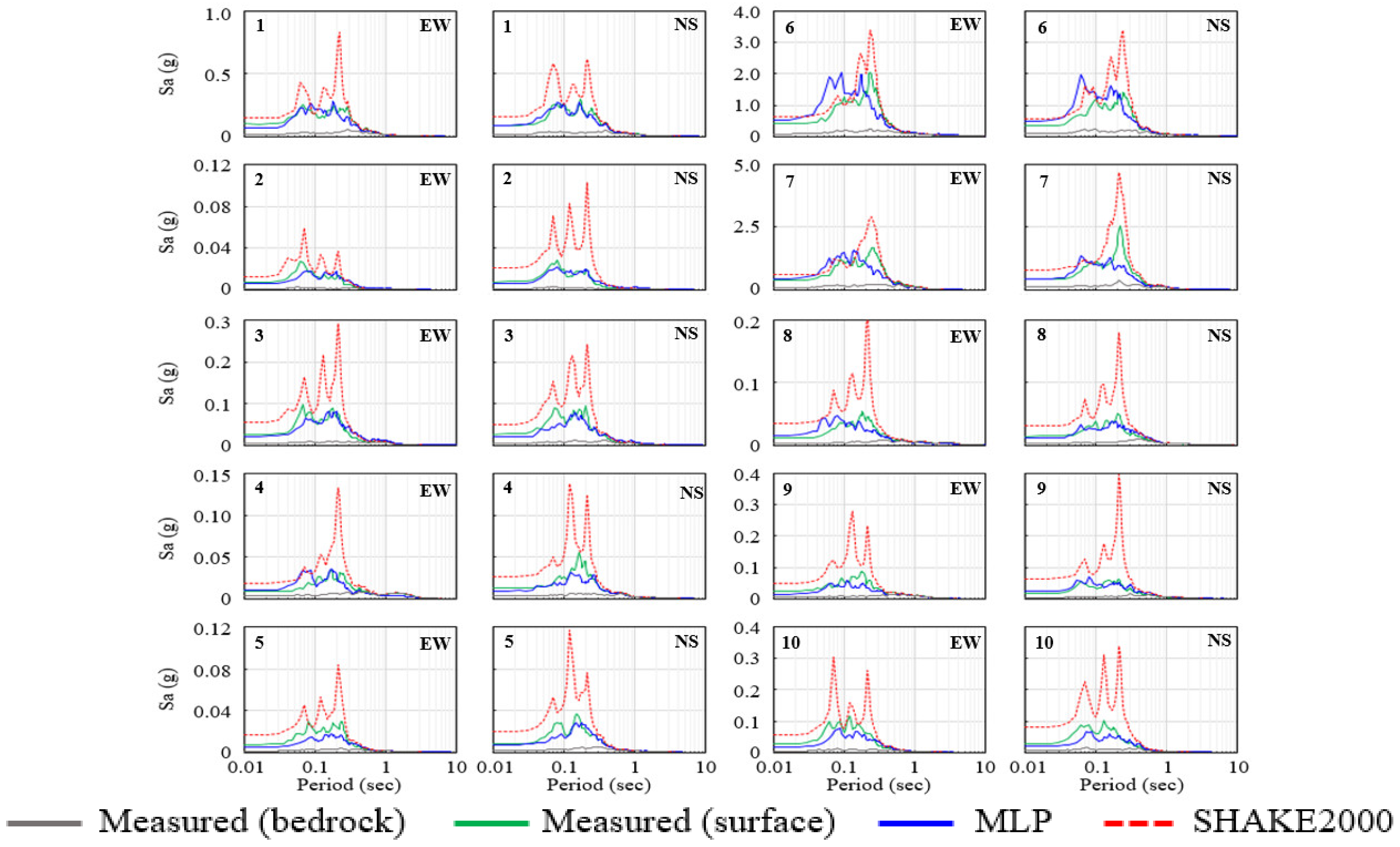
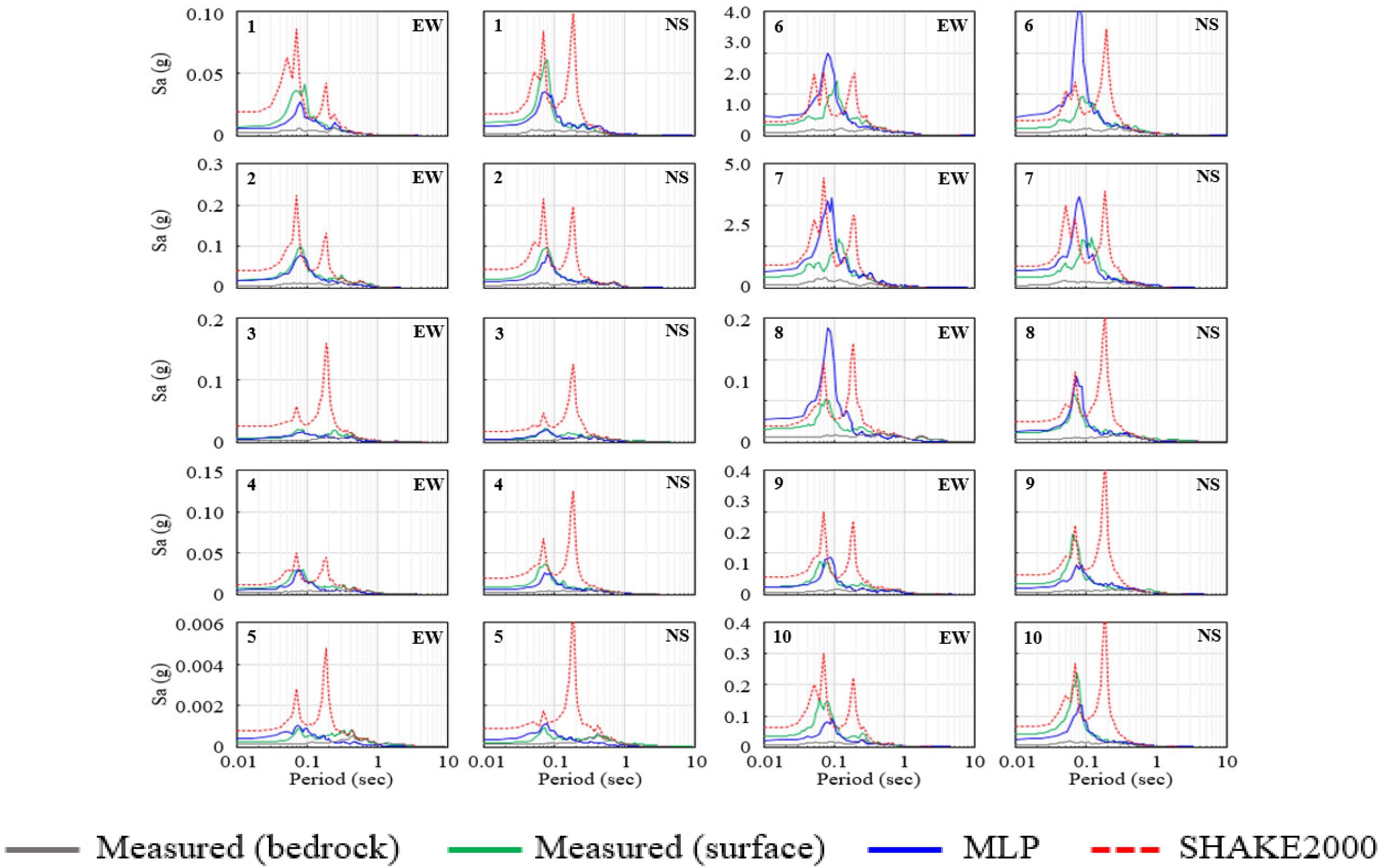
3.2. Response Spectrum
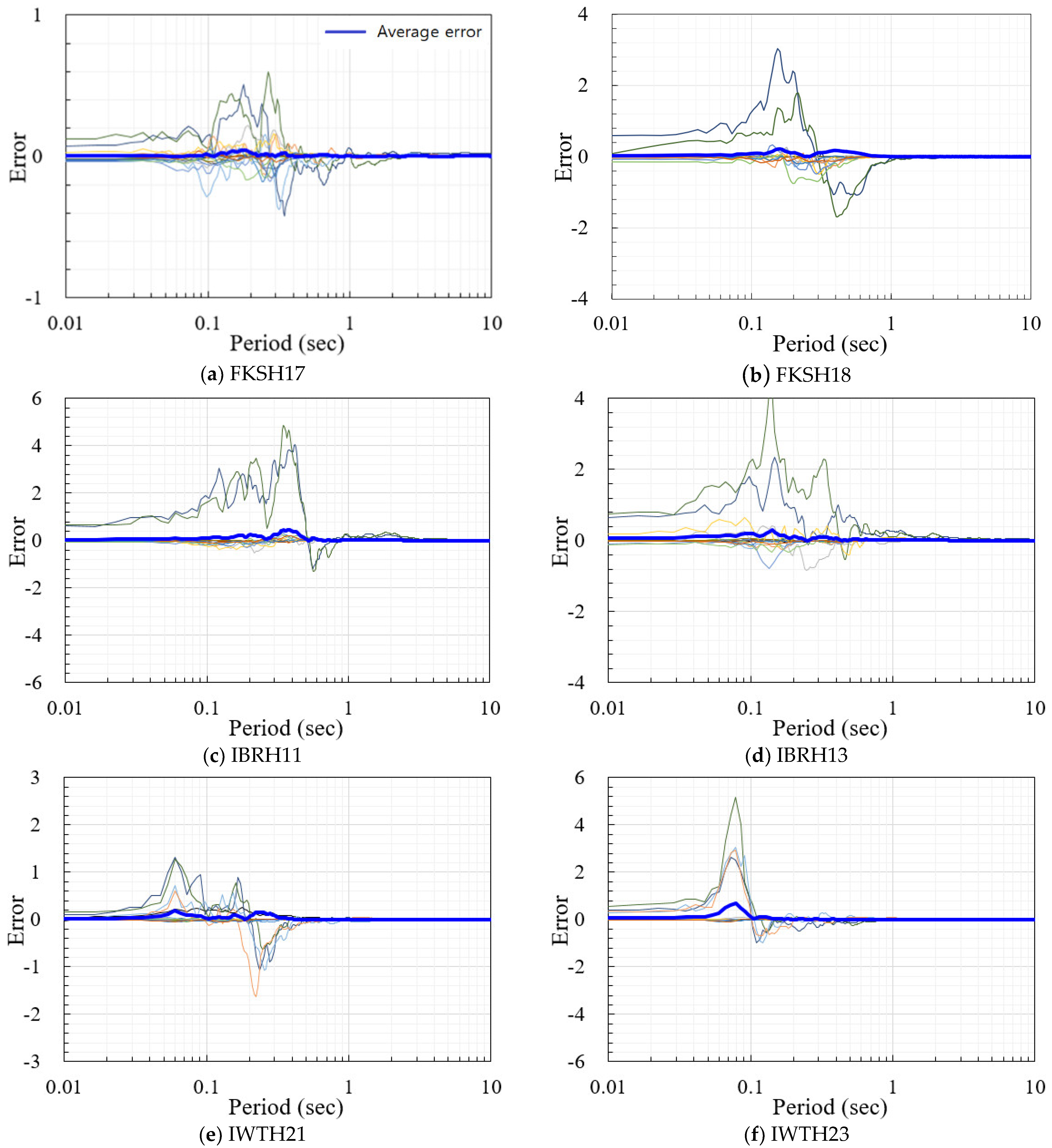
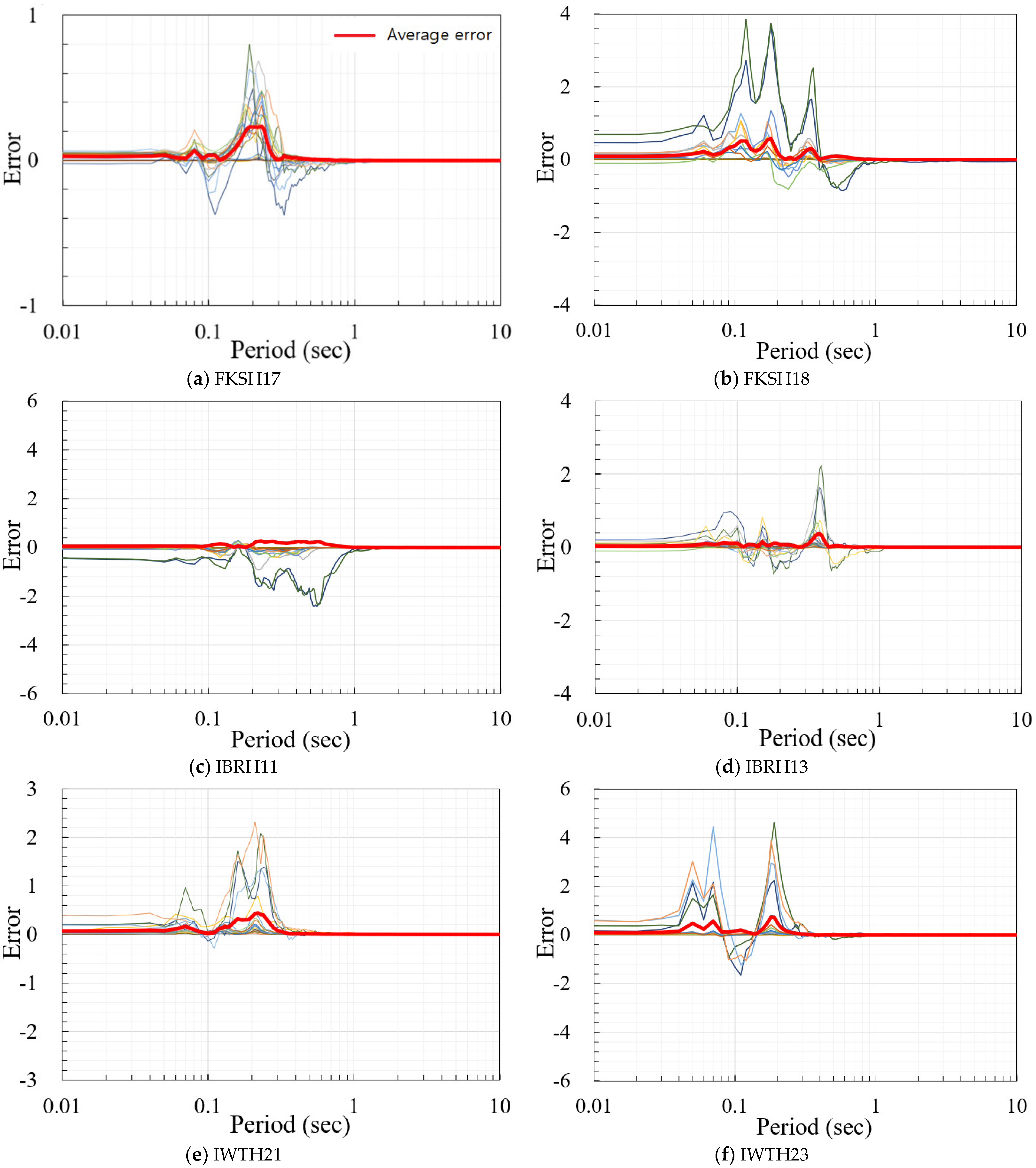
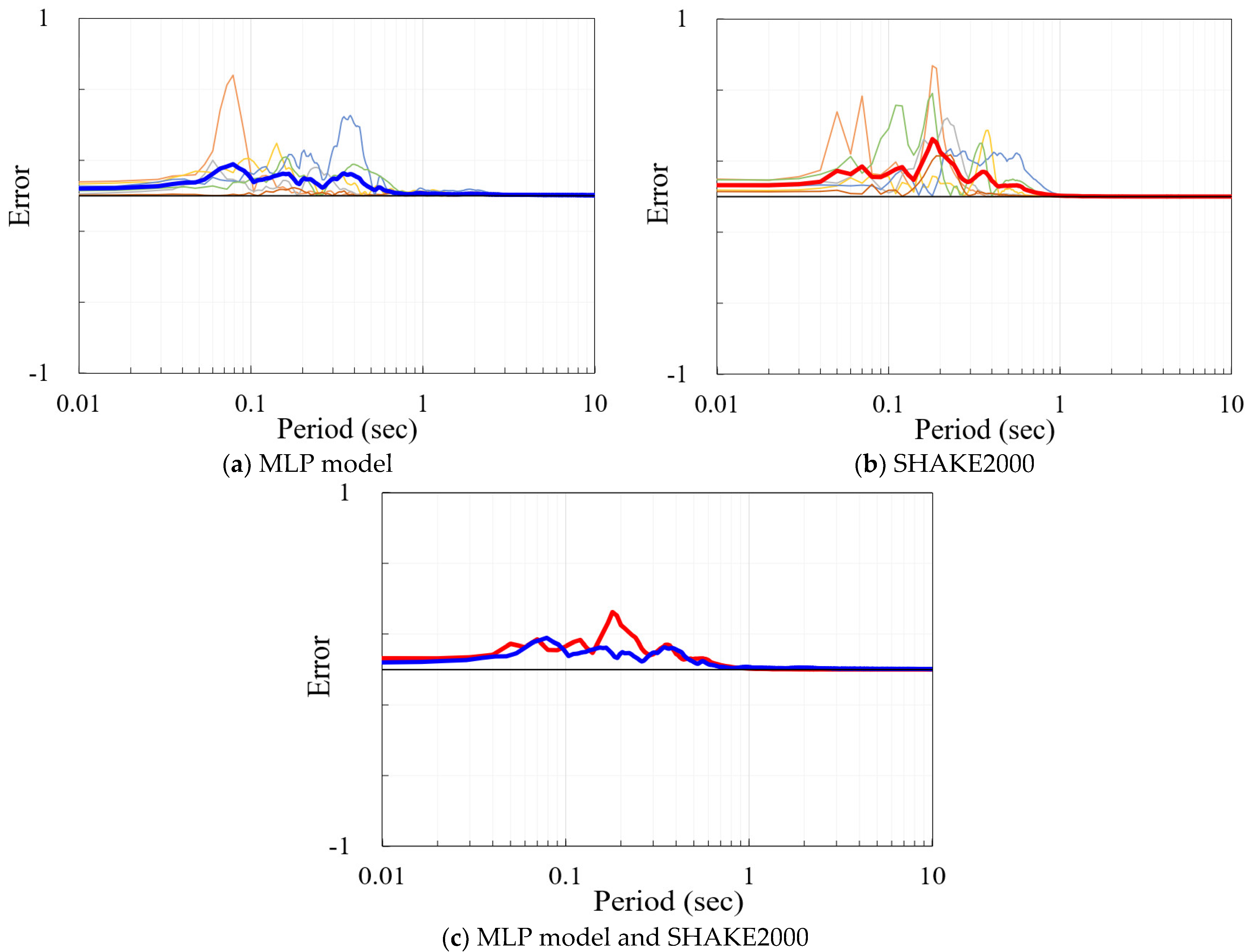
3.3. Prediction Errors
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Green, R.A.; Olson, S.M.; Cox, B.R.; Rix, G.J.; Rathje, E.; Bachhuber, J.; French, J.; Lasley, S.; Martin, N. Geotechnical aspects of failures at Port-auPrince seaport during the 12 January 2010 Haiti earthquake. Earthq. Spectra 2011, 27, 43–65. [Google Scholar] [CrossRef]
- Lee, S.H.; Sun, C.G.; Yoon, J.K.; Kim, D.S. Development and verification of a new site classification system and site coefficients for Regions of Shallow Bedrock in Korea. J. Earthq. Eng. 2012, 16, 795–819. [Google Scholar] [CrossRef]
- Kramer, S.L. Geotechnical Earthquake Engineering; Prentice Hall: Upper Saddle River, NJ, USA, 2005. [Google Scholar]
- LeCun, Y.; Bengio, Y.; Hinton, G. Deep learning. Nature 2015, 521, 436–444. [Google Scholar] [CrossRef] [PubMed]
- Adeli, H.; Yeh, C. Preceptron learning in engineering design. Comput.-Aided Civ. Infrastruct. Eng. 1989, 4, 247–256. [Google Scholar] [CrossRef]
- Moayedi, H.; Bui, D.T.; Thi Ngo, P.T. Shuffled Frog Leaping Algorithm and Wind-Driven Optimization Technique Modified with Multilayer Perceptron. Appl. Sci. 2020, 10, 689. [Google Scholar] [CrossRef]
- Yu, H.; Chen, G.; Gu, H. A machine learning methodology for multivariate pore-pressure prediction. Comput. Geosci. 2020, 143, 104548. [Google Scholar] [CrossRef]
- Cury, A.; Crémona, C. Pattern recognition of structural behaviors based on learning algorithms and symbolic data concepts. Struct. Control Health Monit. 2012, 19, 161–186. [Google Scholar] [CrossRef]
- Kao, C.-Y.; Loh, C.-H. Monitoring of long-term static deformation data of Fei-Tsui arch dam using artificial neural network-based approaches. Struct. Control Health Monit. 2013, 20, 282–303. [Google Scholar] [CrossRef]
- Suresh, S.; Narasimhan, S.; Nagarajaiah, S. Direct adaptive neural controller for the active control of earthquake-excited nonlinear base-isolated buildings. Struct. Control Health Monit. 2012, 19, 370–384. [Google Scholar] [CrossRef]
- Arangio, S.; Beck, J.L. Bayesian neural networks for bridge integrity assessment. Struct. Control Health Monit. 2012, 19, 3–21. [Google Scholar] [CrossRef]
- Razavi, S.V.; Jumaat, M.Z.; Ahmed, H.E.-S.; Ronagh, H.R. Load-deflection analysis of CFRP strengthened RC slab using focused feed-forward time delay neural network. Concr. Res. Lett. 2014, 5, 858–872. [Google Scholar]
- Derkevorkian, A.; Hernandez-Garcia, M.; Yun, H.-B.; Masri, S.F.; Li, P. Nonlinear data-driven computational models for response prediction and change detection. Struct. Control Health Monit. 2015, 22, 273–288. [Google Scholar] [CrossRef]
- Wu, R.-T.; Jahanshahi, M.R. Deep convolutional neural network for structural dynamic response estimation and system identification. J. Eng. Mech. 2019, 145, 04018125. [Google Scholar] [CrossRef]
- Schnabel, P.B.; Lysmer, J.; Seed, H.B. SHAKE: A Computer Program for Earthquake Response Analysis of Horizontally Layered Sites; Report No. UCB/EERC-72/12; University of California: Berkeley, CA, USA, 1972. [Google Scholar]
- Smalley, R., Jr.; Ellis, M.A.; Paul, J.; Van Arsdale, R.B. Space geodetic evidence for rapid strain rates in the New Madrid seismic zone of central USA. Nature 2005, 435, 1088–1090. [Google Scholar] [CrossRef] [PubMed]
- Seismosoft Home Page. Available online: https://seismosoft.com/products/seismosignal (accessed on 12 March 2020).
- Building Seismic Safety Council (US); Federal Emergency Management Agency. NEHRP Recommended Provisions for the Development of Seismic Regulations for New Buildings; BSSC: Washington, DC, USA, 1988. [Google Scholar]
- Nakamura, Y.A. Method for Dynamic Characteristics Estimation of Subsurface Using Microtremor on the Ground Surface; Railway Technical Research Institute, Quarterly Reports: Tokyo, Japan, January 1989. [Google Scholar]
- Belue, L.M.; Bauer, K.W. Determining input features for multilayer perceptrons. Neurocomputing 1995, 7, 111–121. [Google Scholar] [CrossRef]
- Giles, C.L.; Maxwell, T. Learning, invariance, and generalization in high-order neural networks. Appl. Opt. 1987, 26, 4972–4978. [Google Scholar] [CrossRef] [PubMed]
- Chiang, C.-C.; Fu, H.-C. A variant of second order multilayer perceptron and its application to function approximations. In Proceedings of the International Joint Conference on Neural Networks, Baltimore, MD, USA, 7–11 June 1992; pp. 887–892. [Google Scholar] [CrossRef]
- Piazza, F.; Uncini, A.; Zenobi, M. Artificial neural networks with adaptive polynomial activation function. In Proceedings of the International Joint Conference on Neural Networks, Beijing, Hebei, China, 7–11 June 1992; pp. 343–348. [Google Scholar]
- Kingma, D.P.; Ba, J. Adam: A method for stochastic optimization. arXiv 1412, arXiv:1412.6980. [Google Scholar]
- Nair, V.; Hinton, G.E. Rectified linear units improve restricted boltzmann machines. In Proceedings of the 27th International Conference on Machine Learning, Haifa, Israel, 21–24 June 2010. [Google Scholar]
- Yoshida, N. Seismic Ground Response Analysis; Springer: Dordrecht, The Netherlands, 2015. [Google Scholar]
- GeoMotions, LCC Home Page. Available online: http://geomotions.com (accessed on 20 December 2020).
- Seed, H.B.; Idriss, I.M. Soil Moduli and Damping Factors for Dynamic Response Analysis; Report No. EERC 70-10; University of California: Berkeley, CA, USA, 1970. [Google Scholar]
- Seed, H.B.; Wong, R.T.; Idriss, I.M.; Tokimatsu, K. Moduli and damping factors for dynamic analysis of cohesionless soils. J. Geotech. Eng. 1986, 112, 1016–1032. [Google Scholar] [CrossRef]
- Schnabel, P.B. Effects of Local Geology and Distance from Source on Earthquake Ground Motions; University of California: Berkeley, CA, USA, 1973. [Google Scholar]
- Chopra, A.K. Dynamics of Structures: Theory and Applications to Earthquake Engineering; Prentice Hall: Upper Saddle River, NJ, USA, 2017. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
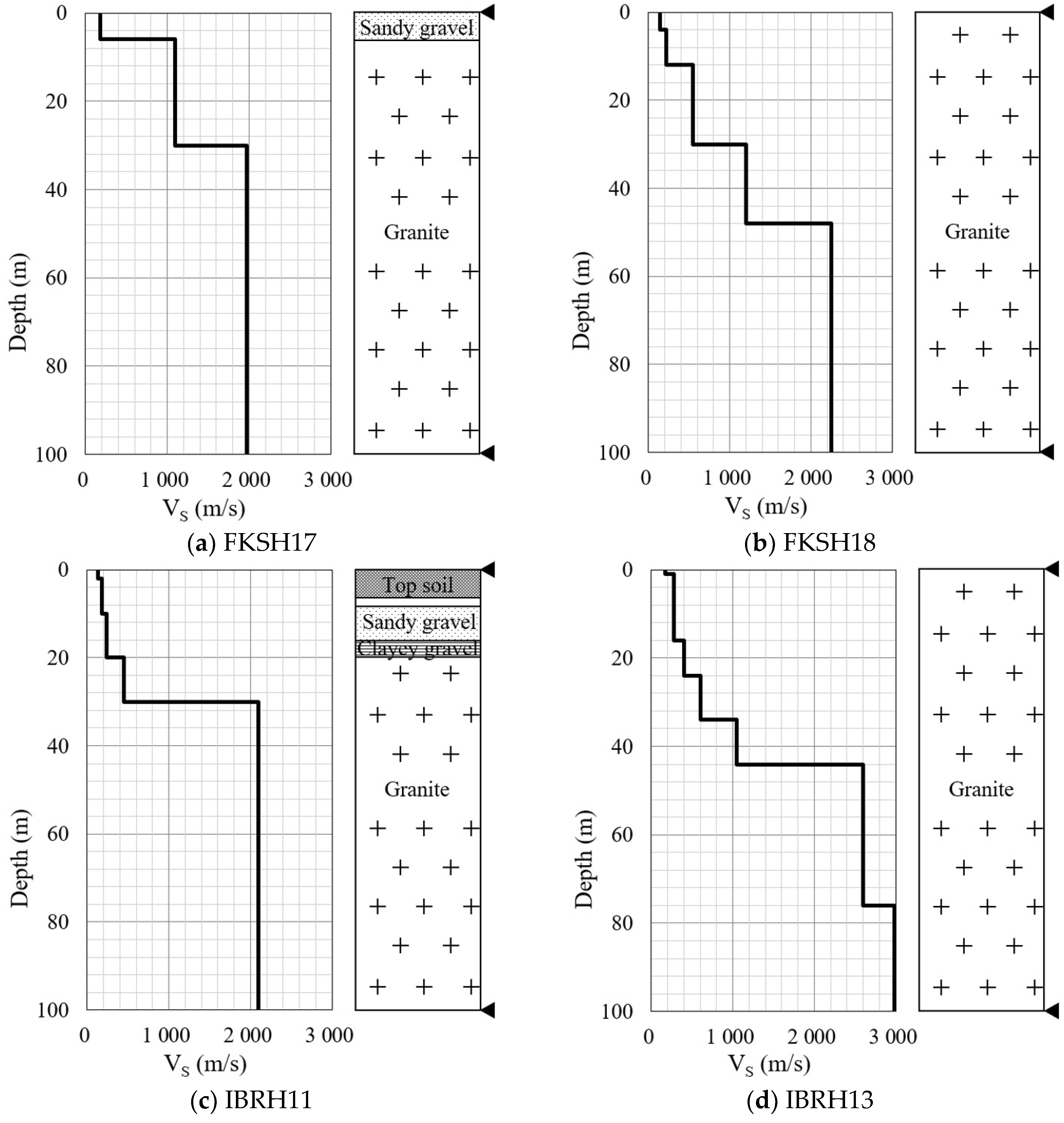
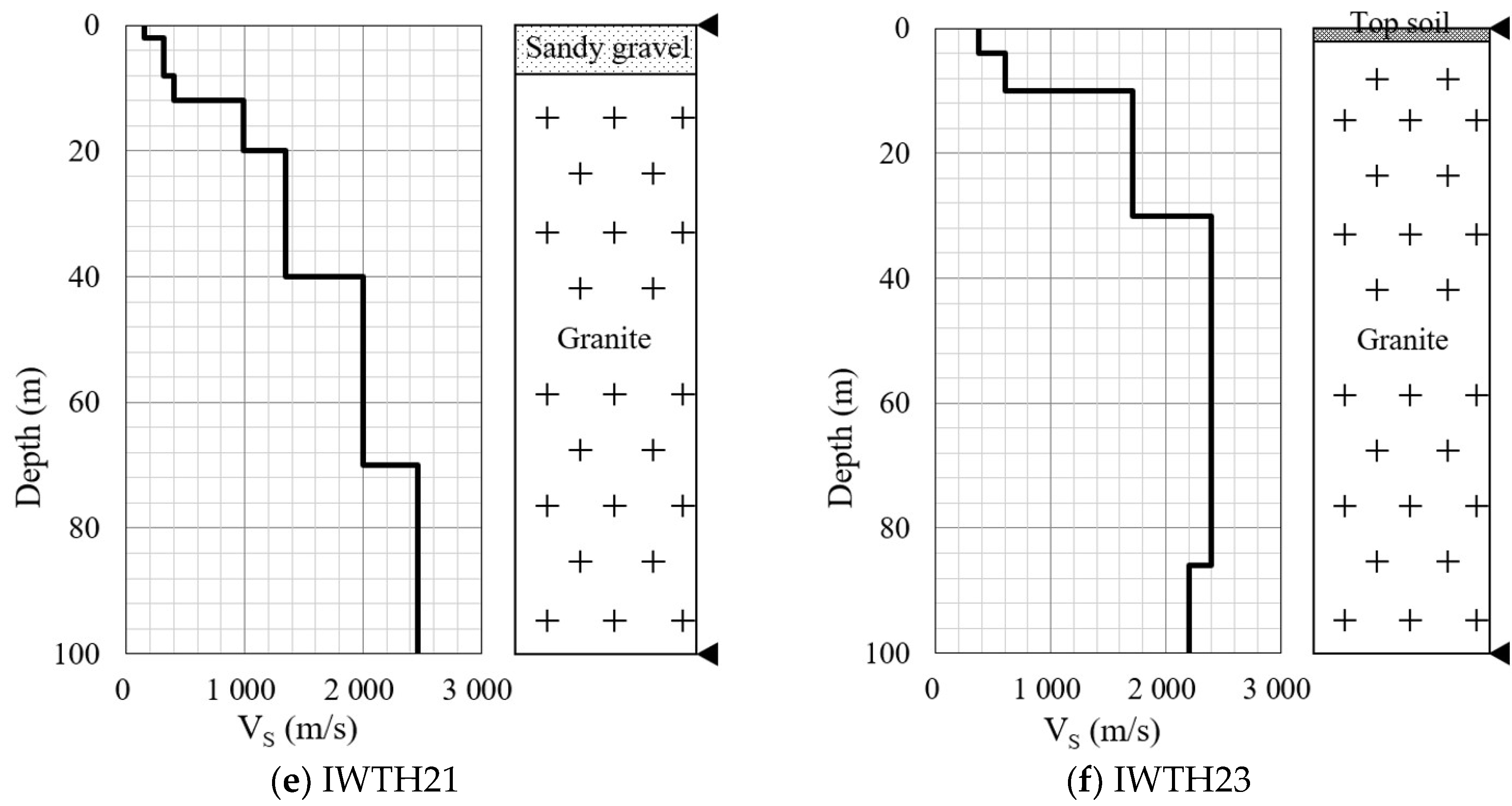
| Station | Depth where Vs is over 1000 m/s (m) | Depth where Vs is over 2000 m/s (m) | ||
|---|---|---|---|---|
| FKSH17 | 544.0 | 0.22 | 6 | 30 |
| FKSH18 | 307.2 | 0.39 | 30 | 48 |
| IBRH11 | 242.5 | 0.49 | 30 | 30 |
| IBRH13 | 335.4 | 0.36 | 34 | 44 |
| IWTH21 | 521.1 | 0.23 | 20 | 40 |
| IWTH23 | 922.9 | 0.13 | 10 | 30 |
| Description | Assumed Type of Soil | Normalized Shear Modulus and Damping Ratio Curves |
|---|---|---|
| Top soil | Sand (Mean) | Seed and Idriss, 1970 |
| Sandy & Clayey Gravel | Gravel (Mean) | Seed et al., 1986 |
| Granite | Rock (Mean) | Schnabel, 1973 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoo, J.; Hong, S.; Ahn, J. Seismic Ground Response Prediction Based on Multilayer Perceptron. Appl. Sci. 2021, 11, 2088. https://doi.org/10.3390/app11052088
Yoo J, Hong S, Ahn J. Seismic Ground Response Prediction Based on Multilayer Perceptron. Applied Sciences. 2021; 11(5):2088. https://doi.org/10.3390/app11052088
Chicago/Turabian StyleYoo, Jaewon, Seokgyeong Hong, and Jaehun Ahn. 2021. "Seismic Ground Response Prediction Based on Multilayer Perceptron" Applied Sciences 11, no. 5: 2088. https://doi.org/10.3390/app11052088
APA StyleYoo, J., Hong, S., & Ahn, J. (2021). Seismic Ground Response Prediction Based on Multilayer Perceptron. Applied Sciences, 11(5), 2088. https://doi.org/10.3390/app11052088