
A Bioinspired Humanoid Foot Mechanism

 ,
,  ,
,  , and
, and 
Abstract
1. Introduction
2. Materials and Methods
2.1. Requirements for Humanoid Foot Mechanisms
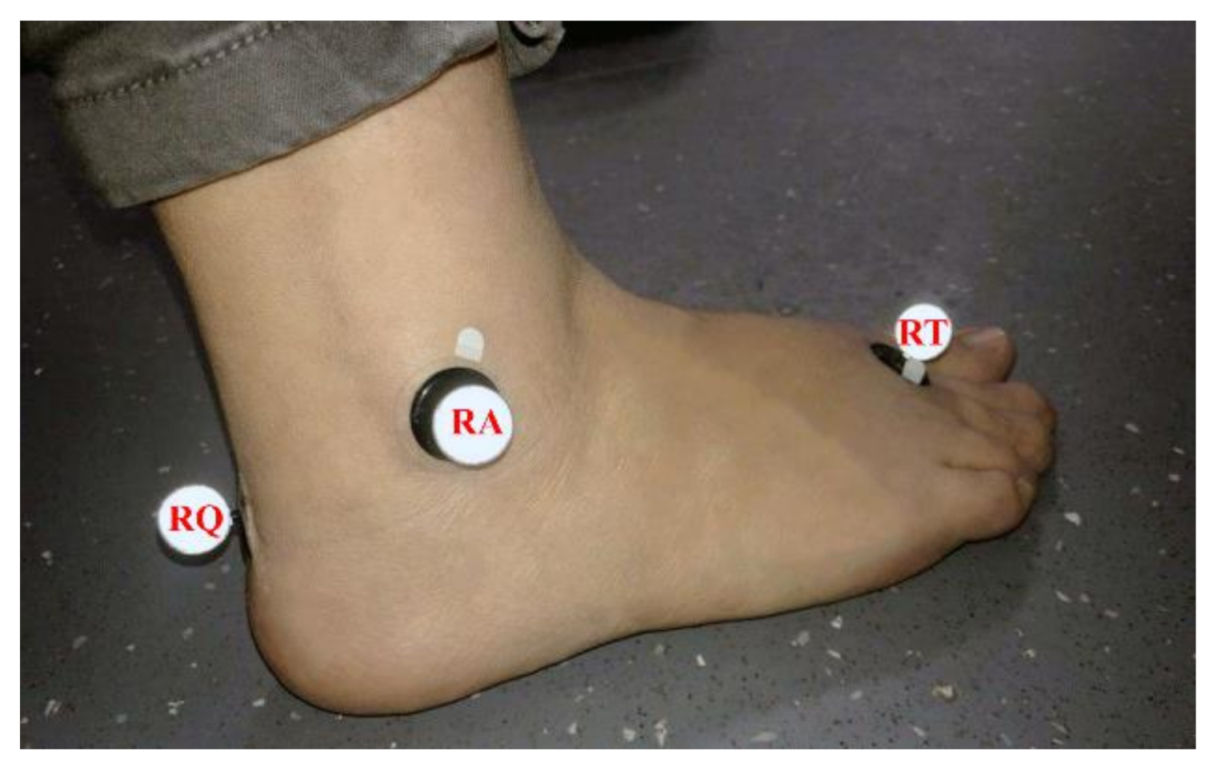
- RA, right ankle marker: Placed at the level of the lateral malleolus;
- RT, right toe marker: Placed on the lateral aspect of the foot at the second metatarsal head;
- RQ, right heel marker: Positioned so that the heel–toe marker vector is parallel to (but offset from) the sole of the foot, and is aligned with the foot progression line (i.e., the line from the ankle center to the space between the second and third metatarsal heads).
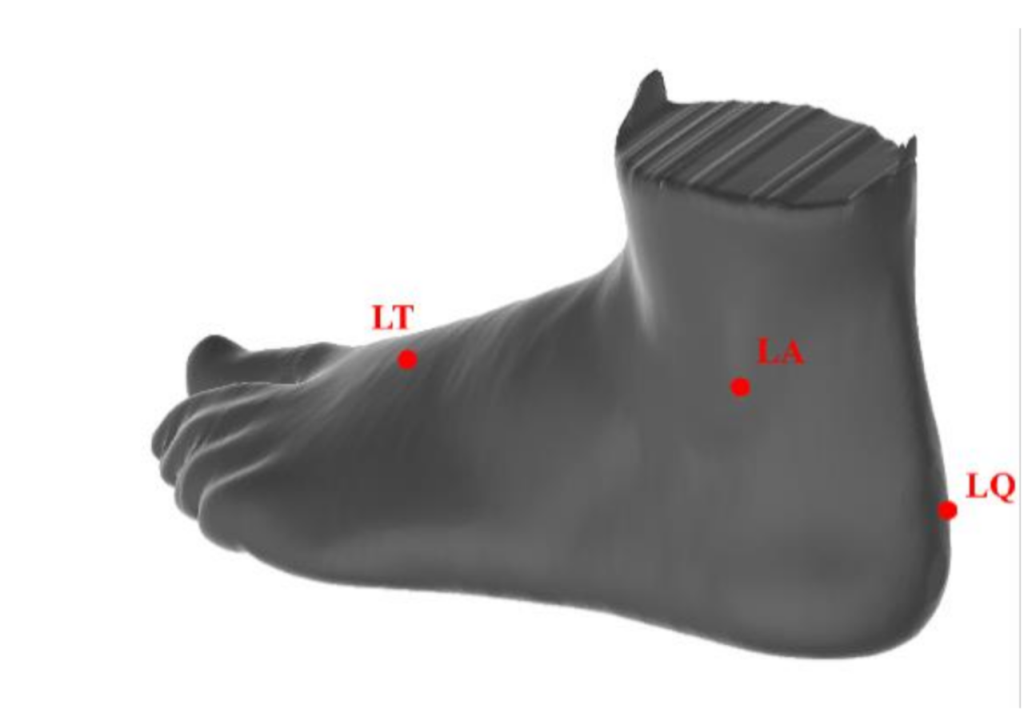
- LA, left ankle marker: Placed at the level of the lateral malleolus;
- LT, left toe marker: Placed on the lateral aspect of the foot at the second metatarsal head;
- LQ, left heel marker: Positioned so that the heel–toe marker vector is parallel to (but offset from) the sole of the foot, and is aligned with the foot progression line.
- For each four-step acquisition, each step of the gait was isolated.
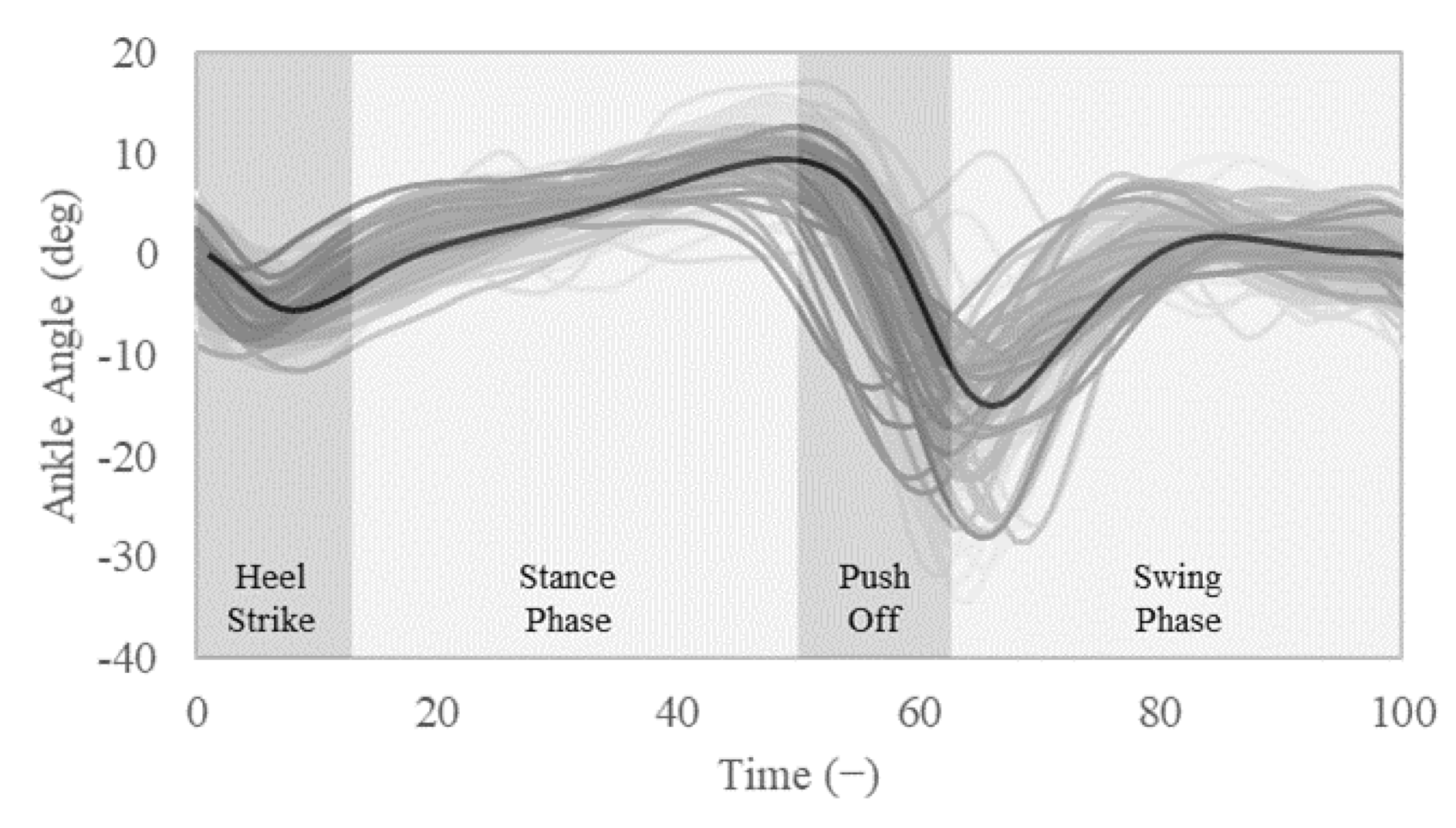
- The time of each single step was normalized in a 0 to 100 scale, in which 0 represents the beginning of the step cycle (stance with dual foot support) and 100 represents the end of that step cycle, and corresponds to the beginning of the following step.
- The normalized step data were filtered and compared for all of the acquisitions in order to remove out-of-phase outliers, whereas the outliers on the ankle angle acquired value were left in the graph in Figure 3 for completeness, but were removed from further calculations.
- The remaining dataset was used to obtain a normalized average gait in terms of ankle angle, which is illustrated by the black line in Figure 3.
2.2. An Underactuated Humanoid Foot Mechanism
3. Results
3.1. Simulation and Results
- [M] = Mass matrix of the system;
- [C] = Damping matrix of the system;
- = Stiffness matrix of the system;
- = Vector of externally-applied nodal loads;
- = Vector of internally-generated nodal forces at iteration (i−1);
- = Vector of incremental nodal displacements at iteration (i);
- = Vector of total displacements at iteration (i);
- = Vector of total velocities at iteration (i);
- = Vector of total accelerations at iteration (i).
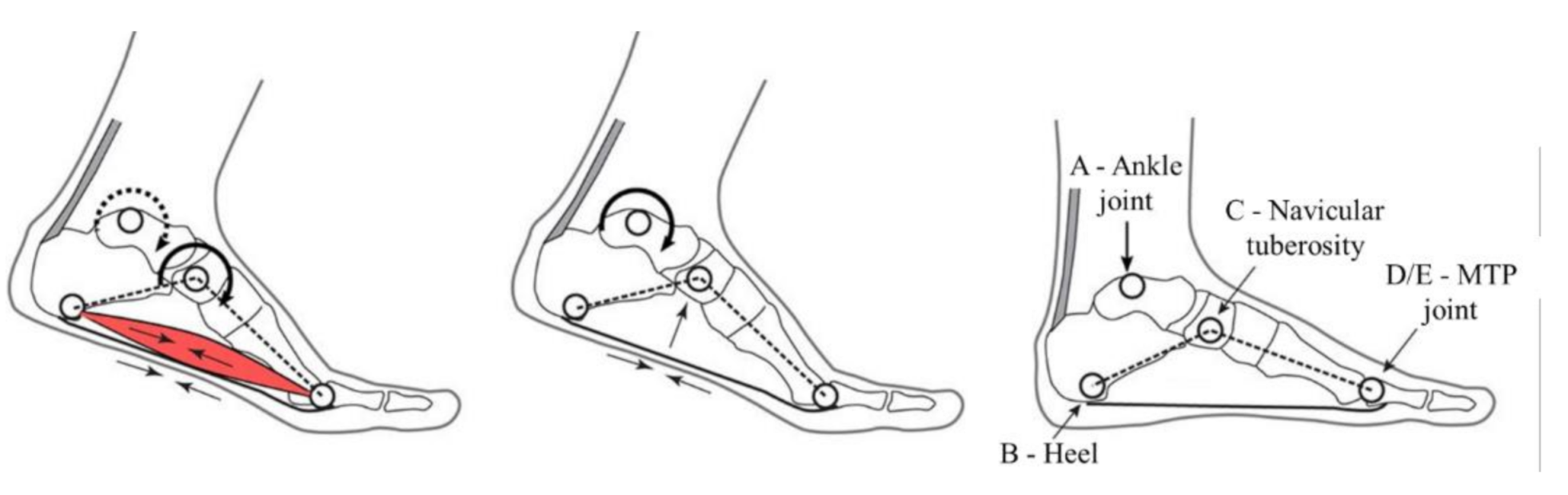
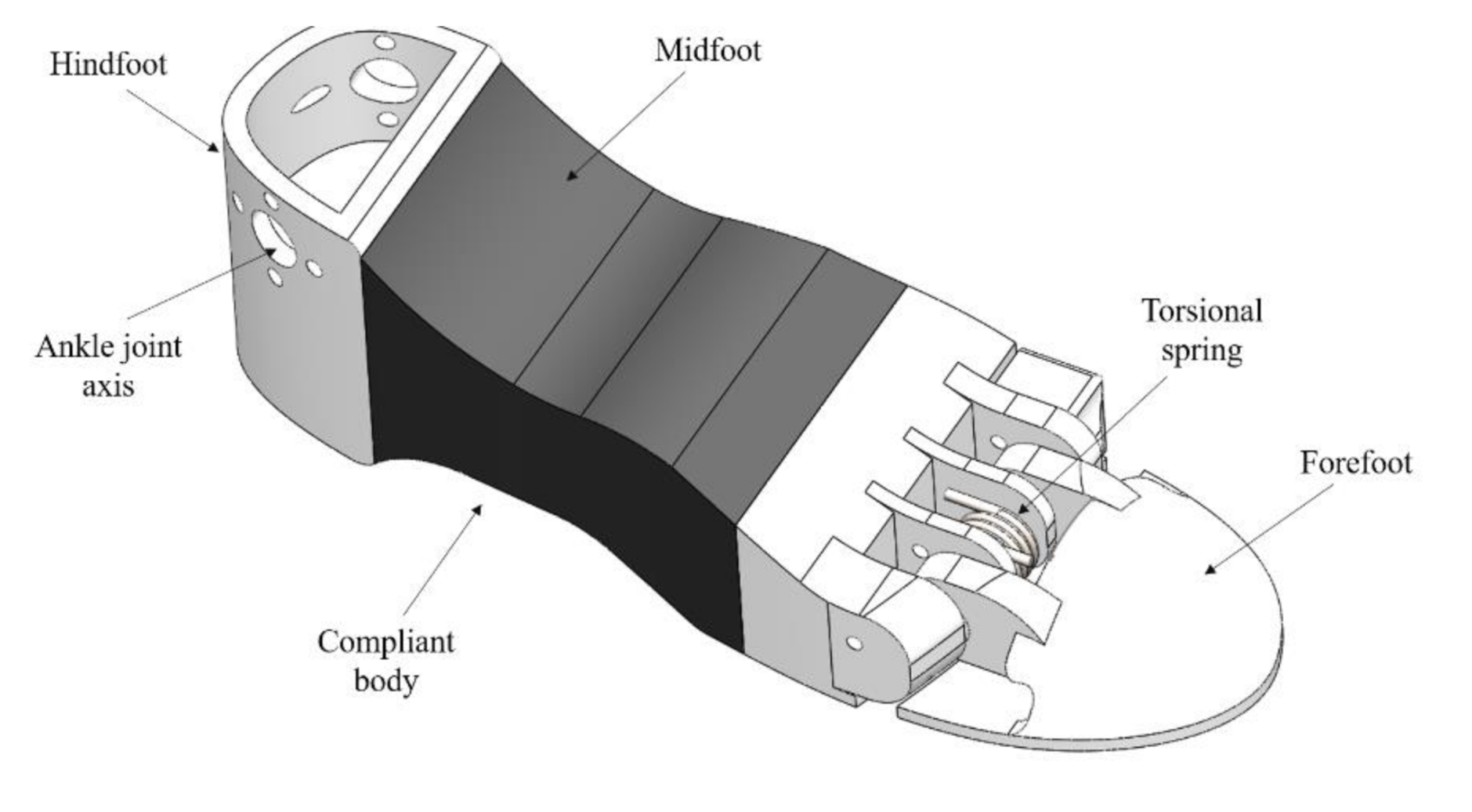
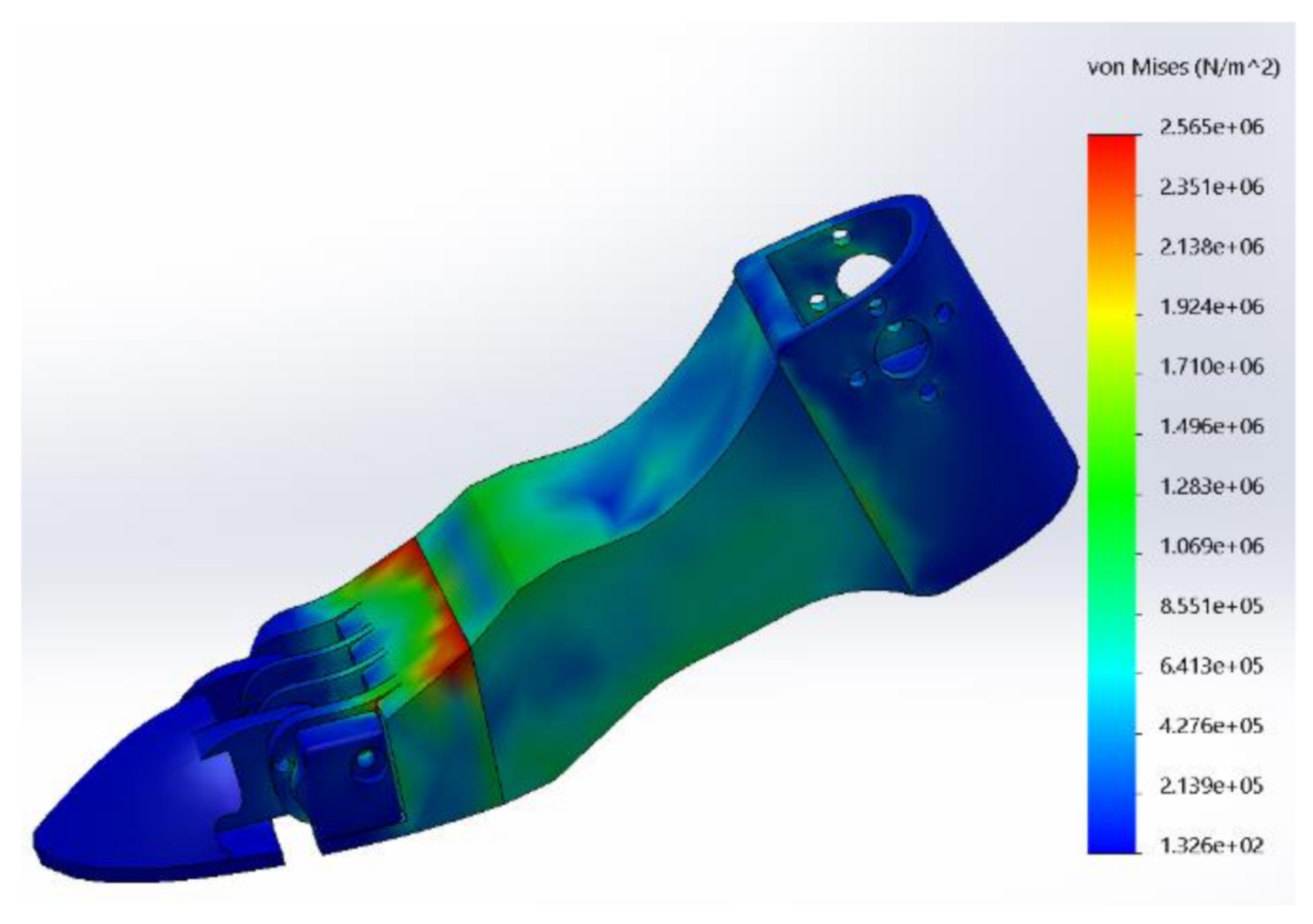
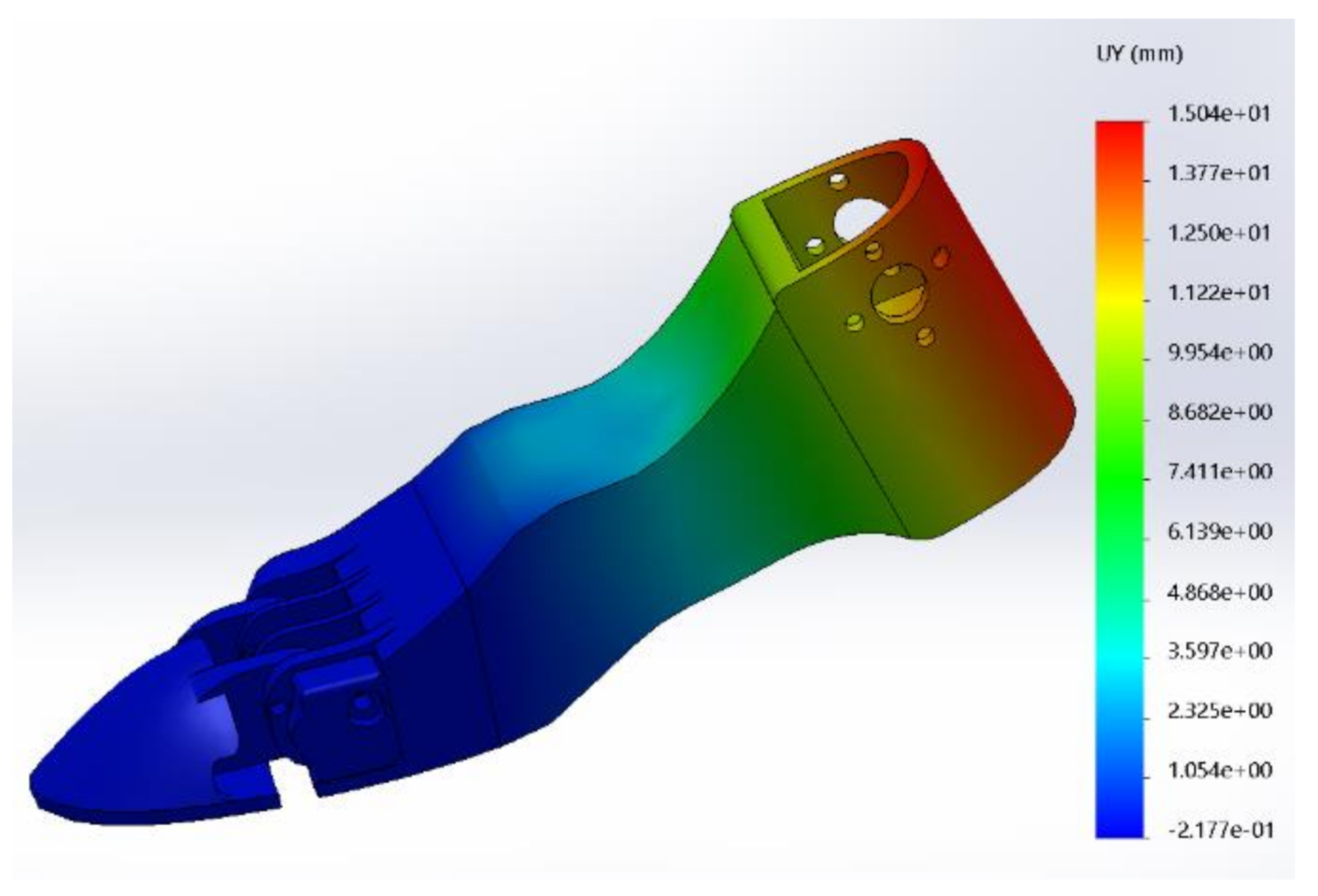
- Starting from the rigid body of the hindfoot, the angular displacement is applied to the ankle joint. The hindfoot is connected to the flexible body of the midfoot, which starts to deform.
- When the angular displacement causes the foot to hit the ground, the midfoot is characterized by a stress concentration in the upper part, as per Figure 9.
- The arc bottom part of the foot is loaded with a maximum tension of 1.57 × 106 N/m2, behaving as the human foot muscle when stepping.
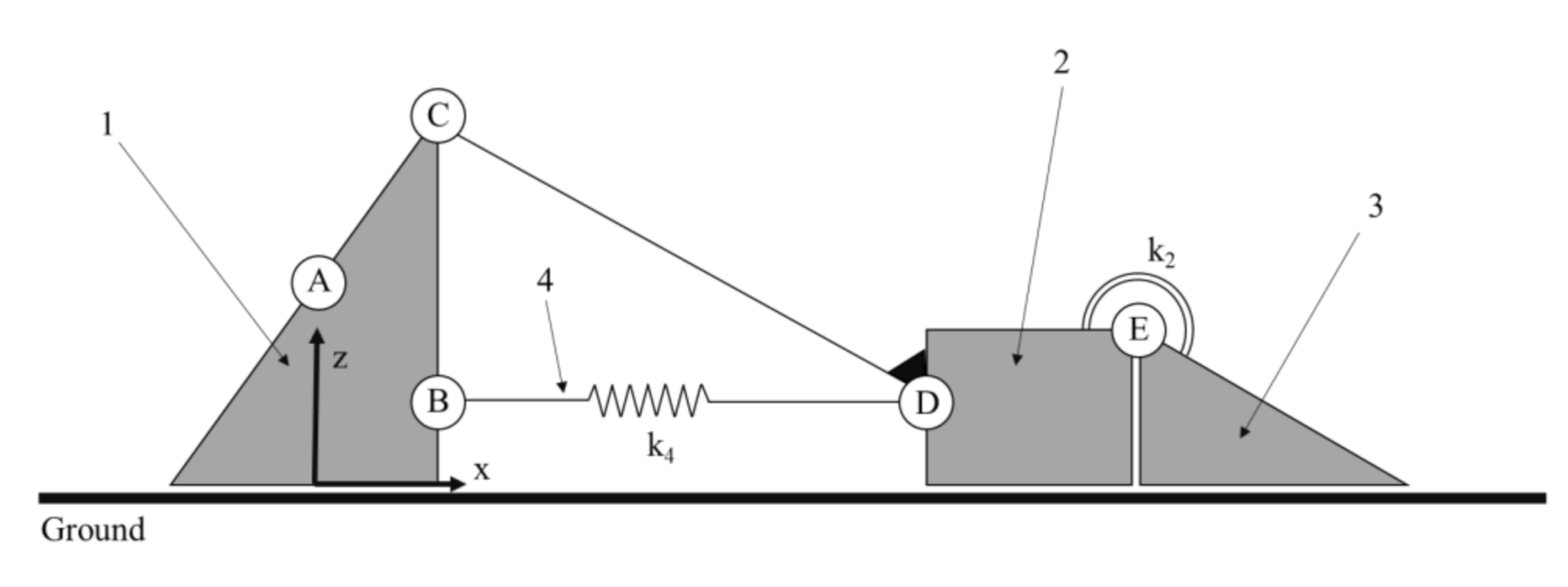
- The spring connecting the two bodies of the forefoot is stretched. This helps the foot to adapt to the ground, and the potential energy of the spring restores the neutral ‘flat’ position when the contact is released.
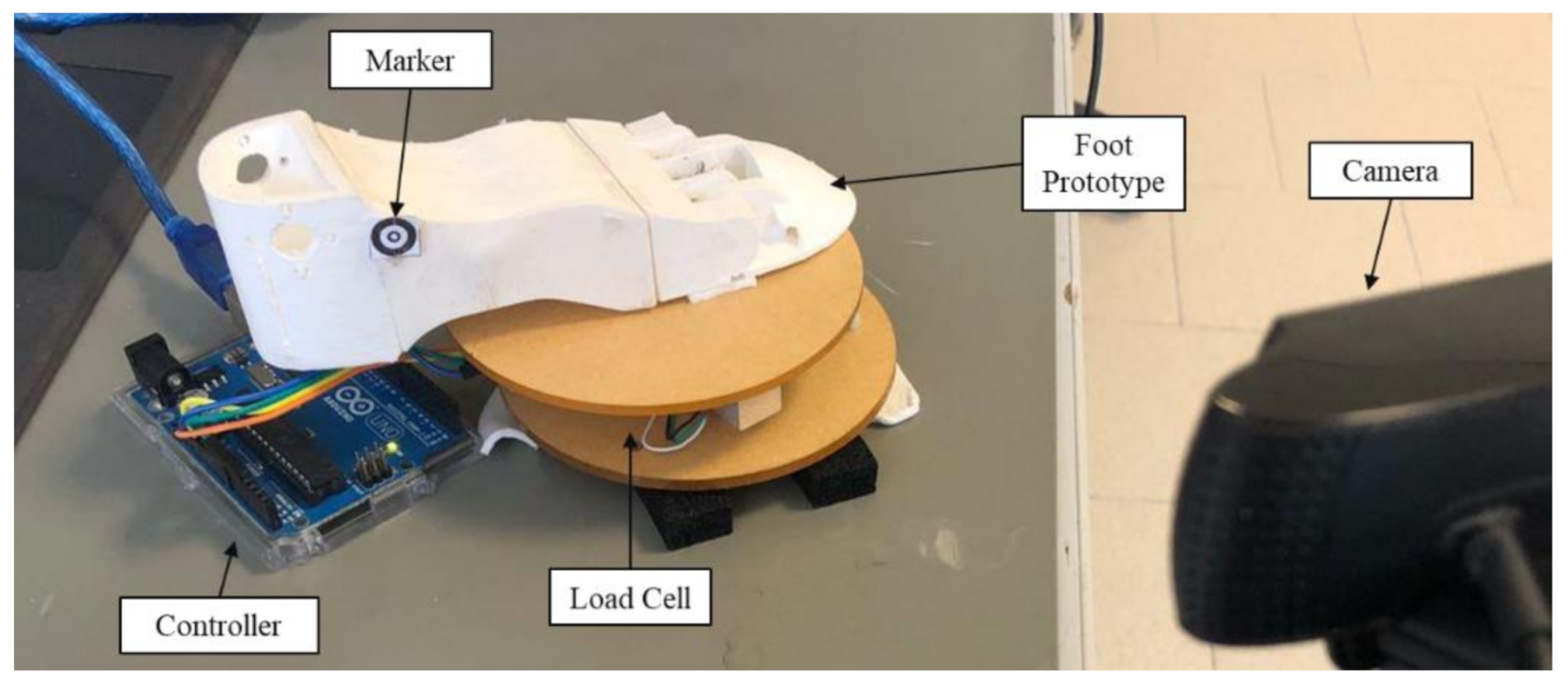
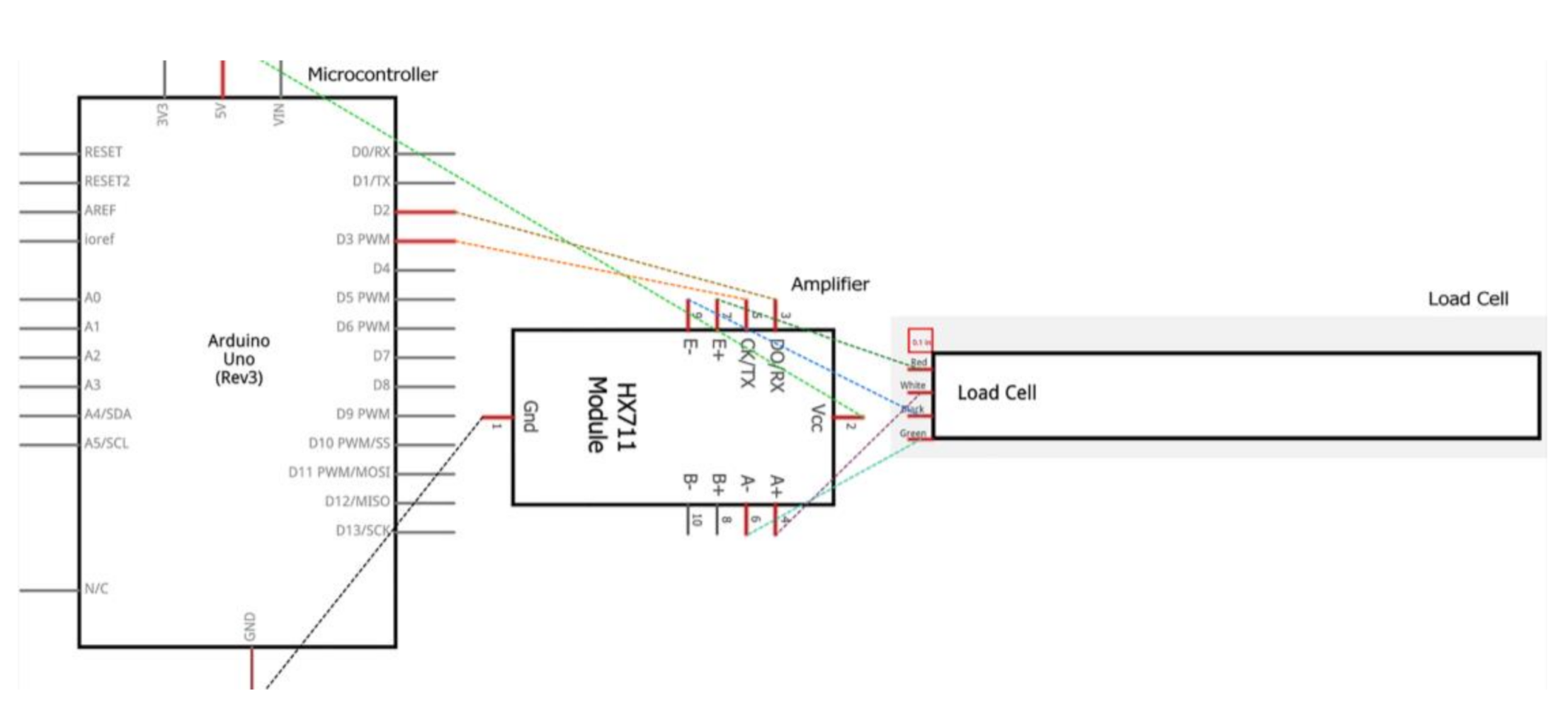
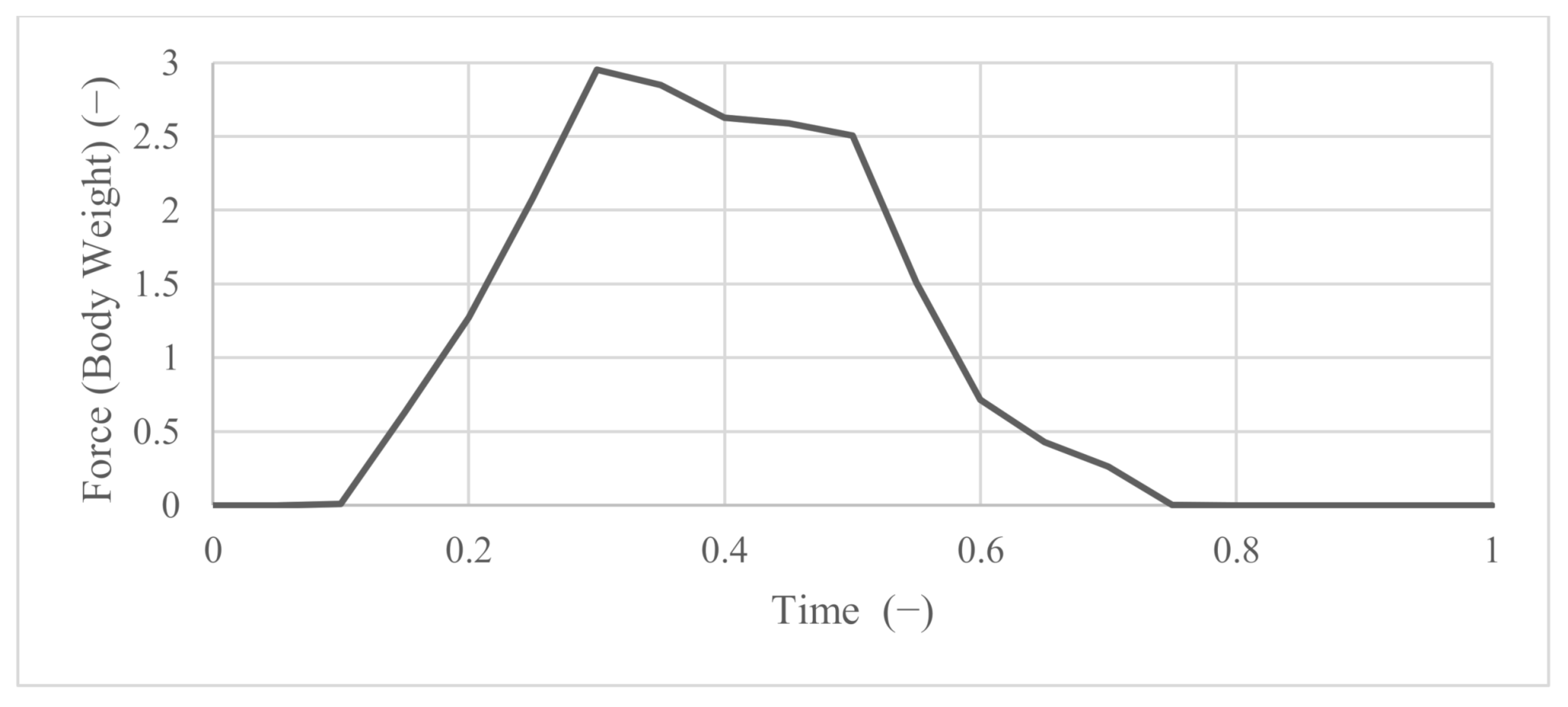
3.2. Experimental Tests
4. Discussion and Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Siciliano, B.; Khatib, O. Springer Handbook of Robotics; Springer: Berlin/Heidelberg, Germany, 2016. [Google Scholar]
- Lim, H.-O.; Takanishi, A. Biped walking robots created at waseda university: Wl and wabian family. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 49–64. [Google Scholar] [CrossRef] [PubMed]
- Hirose, M.; Ogawa, K. Honda humanoid robots development. Philos. Trans. R. Soc. A Math. Phys. Eng. Sci. 2007, 365, 11–19. [Google Scholar] [CrossRef] [PubMed]
- Kajita, S.; Nagasaki, T.; Kaneko, K.; Yokoi, K.; Tanie, K. A hop towards running humanoid biped. In Proceedings of the IEEE International Conference on Robotics and Automation, ICRA’04, New Orleans, LA, USA, 26 April–1 May 2004; Volume 1, pp. 629–635. [Google Scholar]
- Park, I.-W.; Kim, J.-Y.; Lee, J.; Oh, J.-H. Mechanical design of humanoid robot platform khr-3 (kaist humanoid robot 3: Hubo). In Proceedings of the 5th IEEE-RAS International Conference on Humanoid Robots, Tsukuba, Japan, 5–7 December 2005; pp. 321–326. [Google Scholar]
- Tajima, R.; Honda, D.; Suga, K. Fast running experiments involving a humanoid robot. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 1571–1576. [Google Scholar]
- Tsagarakis, N.G.; Li, Z.; Saglia, J.; Caldwell, D.G. The design of the lower body of the compliant humanoid robot iCub. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2035–2040. [Google Scholar]
- Zyu, H.Q.; Ma, G.; Chen, X.; Zhang, W.; Li, J.; Gao, J. Design and development of the humanoid robot bhr-5. Adv. Mech. Eng. 2014, 6, 852937. [Google Scholar]
- Gouaillier, D.; Hugel, V.; Blazevic, P.; Kilner, C.; Monceaux, J.; Lafourcade, P.; Marnier, B.; Serre, J.; Maisonnier, B. Mechatronic design of NAO humanoid. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 769–774. [Google Scholar]
- Russo, M.; Cafolla, D.; Ceccarelli, M. Design and experiments of a novel humanoid robot with parallel architectures. Robotics 2018, 7, 79. [Google Scholar] [CrossRef]
- Cafolla, D.; Wang, M.; Carbone, G.; Ceccarelli, M. Larmbot: A new humanoid robot with parallel mechanisms. In Proceedings of the Symposium on Robot Design, Dynamics and Control, Udine, Italy, 20–23 June 2016; Springer: Berlin/Heidelberg, Germany, 2016; pp. 275–283. [Google Scholar]
- Russo, M.; Ceccarelli, M. Dynamics of a humanoid robot with parallel architectures. In Proceedings of the IFToMM World Congress on Mechanism and Machine Science, Krakow, Poland, 15–18 July 2019; Springer: Berlin/Heidelberg, Germany, 2019; pp. 1799–1808. [Google Scholar]
- Li, J.; Huang, Q.; Zhang, W.; Yu, Z.; Li, K. Flexible foot design for a humanoid robot. In Proceedings of the 2008 IEEE International Conference on Automation and Logistics, Qingdao, China, 1–3 September 2008; pp. 1414–1419. [Google Scholar]
- Boston Dynamics. ATLAS. Available online: https://www.bostondynamics.com/atlas (accessed on 15 June 2020).
- Lapeyre, M.; Rouanet, P.; Oudeyer, P.-Y. The poppy humanoid robot: Leg design for biped locomotion. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; pp. 349–356. [Google Scholar]
- Piazza, C.; della Santina, C.; Gasparri, G.M.; Catalano, M.G.; Grioli, G.; Garabini, M.; Bicchi, A. Toward an adaptive foot for natural walking. In Proceedings of the 2016 IEEE-RAS 16th International Conference on Humanoid Robots (Humanoids), Cancun, Mexico, 15–17 November 2016; pp. 1204–1210. [Google Scholar]
- Nishiwaki, K.; Kagami, S.; Kuniyoshi, Y.; Inaba, M.; Inoue, H. Toe joints that enhance bipedal and full body motion of humanoid robots. In Proceedings of the Proceedings 2002 IEEE International Conference on Robotics and Automation (Cat. No. 02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 3, pp. 3105–3110. [Google Scholar]
- Buschmann, T.; Lohmeier, S.; Ulbrich, H. Humanoid robot lola: Design and walking control. J. Physiol. 2009, 103, 141–148. [Google Scholar] [CrossRef] [PubMed]
- Borovac, B.; Slavnic, S. Design of multi-segment humanoid robot foot. In Proceedings of the International Conference on Research and Education in Robotics, Heidelberg, Germany, 22–24 May2008; Springer: Berlin/Heidelberg, Germany, 2008; pp. 12–18. [Google Scholar]
- Agrawal, A.; Banala, S.K.; Agrawal, S.K.; Binder-Macleod, S.A. Design of a twodegree-of-freedom ankle-foot orthosis for robotic rehabilitation. In Proceedings of the 9th International Conference on Rehabilitation Robotics, ICORR, Chicago, IL, USA, 28 June–1 July 2005; pp. 41–44. [Google Scholar]
- Narioka, K.; Homma, T.; Hosoda, K. Humanlike ankle-foot complex for a bipedrobot. In Proceedings of the 2012 12th IEEE-RAS International Conference on Humanoid Robots (Humanoids 2012), Osaka, Japan, 29 November–1 December 2012; pp. 15–20. [Google Scholar]
- Hashimoto, K.; Motohashi, H.; Takashima, T.; Lim, H.; Takanishi, A. Shoes-wearable foot mechanism mimicking characteristics of human’s foot arch and skin. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 686–691. [Google Scholar]
- Torricelli, D.; Gonzalez, J.; Weckx, M.; Jimenez-Fabian, R.; Vanderborght, B.; Sartori, M.; Dosen, S.; Farina, D.; Lefeber, D.; Pons, J.L. Human-like compliant locomotion: State of the art of robotic implementations. Bioinspir. Biomim. 2016, 11, 051002. [Google Scholar] [CrossRef] [PubMed]
- Knudson, D. Fundamentals of Biomechanics; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Holowka, N.B.; Lieberman, D.E. Rethinking the evolution of the human foot: Insights from experimental research. J. Exp. Biol. 2018, 221, jeb174425. [Google Scholar] [CrossRef] [PubMed]
- Takahashi, Y.; Nishiwaki, K.; Kagami, S.; Mizoguchi, H.; Inoue, H. High-speed pressure sensor grid for humanoid robot foot. In Proceedings of the 2005 IEEE/RSJ International Conference on Intelligent Robots and Systems, Edmonton, AB, Canada, 2–6 August 2005; pp. 3909–3914. [Google Scholar]
- Kim, G.-S.; Shin, H.-J.; Yoon, J. Development of 6-axis force/moment sensor for a humanoid robot’s intelligent foot. Sens. Actuators A Phys. 2008, 141, 276–281. [Google Scholar] [CrossRef]
- Wu, B.; Luo, J.; Shen, F.; Ren, Y.; Wu, Z. Optimum design method of multi-axis force sensor integrated in humanoid robot foot system. Measurement 2011, 44, 1651–1660. [Google Scholar] [CrossRef]
- Yuan, C.; Luo, L.-P.; Yuan, Q.; Wu, J.; Yan, R.-J.; Kim, H.; Shin, K.-S.; Han, C.-S. Development and evaluation of a compact 6-axis force/moment sensor with a serial structure for the humanoid robot foot. Measurement 2015, 70, 110–122. [Google Scholar] [CrossRef]
- Nishiwaki, K.; Murakami, Y.; Kagami, S.; Kuniyoshi, Y.; Inaba, M.; Inoue, H. Asix-axis force sensor with parallel support mechanism to measure the ground reaction force of humanoid robot. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No. 02CH37292), Washington, DC, USA, 11–15 May 2002; Volume 3, pp. 2277–2282. [Google Scholar]
- Davis, R.B.; Ounpuu, S.; Tyburski, D.; Gage, J.R. A Gait Analysis Data Collection and Reduction Technique. Hum. Mov. Sci. 1991, 10, 575–587. [Google Scholar] [CrossRef]
- Gaitlab, B. Multifactorial Gait Analysis with Davis Protocol. Available online: https://www.btsbioengineering.com/products/bts-gaitlab-gait-analysis (accessed on 14 June 2020).
- Baker, R. Gait analysis methods in rehabilitation. J. Neuroeng. Rehabil. 2006, 3, 4. [Google Scholar] [CrossRef] [PubMed]
- Kressig, R.W.; Beauchet, O.; European GAITRite Network Group. Guidelines for clinical applications of spatiotemporal gait analysis in older adults. Aging Clin. Exp. Res. 2006, 18, 174–176. [Google Scholar] [CrossRef] [PubMed]
- Perry, J.; Burnfield, J.M. Gait analysis: Normal and pathological function. J. Pediatr. Orthop. 1992, 12, 815. [Google Scholar] [CrossRef]
- Cafolla, D.; Ceccarelli, M.; Wang, M.; Carbone, G. 3d printing for feasibility check of mechanism design. Int. J. Mech. Control 2016, 17, 3–12. [Google Scholar]
- Hall, S. Basic Biomechanics; McGraw-Hill Higher Education: New York, NY, USA, 2014. [Google Scholar]
- Munro, C.F.; Miller, D.I.; Fuglevand, A.J. Ground reaction forces in running: A reexamination. J. Biomech. 1987, 20, 147–155. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Subject | Age | Gender | Weight (kg) | Height (cm) | Pelvis Width (cm) | Pelvis Height (cm) | Right Leg Length (cm) | Left Leg Length (cm) | Right Knee Diameter (cm) | Left Knee Diameter (cm) | Right Ankle Diameter (cm) | Left Ankle Diameter (cm) |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 27 | F | 67 | 172 | 26.5 | 10 | 34 | 34 | 11 | 11 | 6 | 6 |
| 2 | 37 | M | 75 | 175 | 30 | 8 | 34 | 34 | 10 | 10 | 6 | 6 |
| 3 | 33 | M | 80 | 173 | 24.5 | 8 | 35 | 35 | 10 | 10 | 6.5 | 6.5 |
| 4 | 31 | F | 63 | 161 | 27.5 | 8.5 | 32 | 32 | 10.5 | 10.5 | 5 | 5 |
| 5 | 28 | F | 56 | 169 | 25 | 8 | 35 | 34 | 8 | 8.5 | 4.5 | 5 |
| 6 | 29 | M | 65 | 178 | 20 | 7 | 35 | 35 | 10 | 10 | 6.5 | 6.5 |
| 7 | 22 | F | 56 | 157 | 24.5 | 6 | 30 | 30 | 8.5 | 8.5 | 5 | 5 |
| 8 | 25 | F | 55 | 168 | 24 | 7.5 | 31 | 31 | 9 | 8.5 | 5 | 5 |
| 9 | 27 | M | 72 | 172 | 21.5 | 8 | 35 | 35 | 8 | 8 | 6 | 6 |
| 10 | 23 | M | 75 | 180 | 23 | 8.5 | 33 | 34 | 8.5 | 8.5 | 7 | 6.5 |
| 11 | 21 | M | 70 | 179 | 24 | 11 | 35 | 35 | 8.5 | 9 | 7 | 7 |
| Property | ABS | TPU | Alloy Steel |
|---|---|---|---|
| Yield strength | 4.50 × 107 N/m2 | 5.41 × 107 N/m2 | 2.76 × 107 N/m2 |
| Tensile strength | 7.30 × 107 N/m2 | 7.79 × 107 N/m2 | 6.89 × 107 N/m2 |
| Elastic modulus | 3.00 × 109 N/m2 | 1.48 × 107 N/m2 | 6.90 × 1010 N/m2 |
| Poisson’s ratio | 0.35 | 0.55 | 0.33 |
| Mass density | 1200.00 kg/m3 | 1217.00 kg/m3 | 2700.00 kg/m3 |
| Mesh information | Values |
|---|---|
| Jacobian points | 4 Points |
| Maximum element size | 2.00 mm |
| Tolerance | 0.10 mm |
| Total Nodes | 175,296 |
| Total Elements | 100,015 |
| Property | ABS | ABS Test Method | TPU | TPU Test Method |
|---|---|---|---|---|
| Specific gravity | 1.24 g/cc | ASTM D1505 | 1.14 g/cc | ISO 1183 |
| Flow rate | 6.0 g/10 min | - | 39 cm3/10 min | ISO 1133 |
| Tensile strength | 110 MPa (MD) | ASTM D882 | - | - |
| 145 MPa (TD) | ASTM D882 | - | - | |
| Strain at break | 160% (MD) | ASTM D882 | 530% | ISO 527 |
| 100% (TD) | ASTM D882 | - | - | |
| Tensile modulus | 3310 MPa (MD) | ASTM D882 | 95 MPa | ISO 527 |
| 3860 MPa (TD) | ASTM D882 | - | - | |
| Impact Strength | 7.5 KJ/m2 | - | Notched | ISO 179 |
| No break | Charpy 23C | |||
| Hardness | - | - | 45 Shore D | ISO 868 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Russo, M.; Chaparro-Rico, B.D.M.; Pavone, L.; Pasqua, G.; Cafolla, D. A Bioinspired Humanoid Foot Mechanism. Appl. Sci. 2021, 11, 1686. https://doi.org/10.3390/app11041686
Russo M, Chaparro-Rico BDM, Pavone L, Pasqua G, Cafolla D. A Bioinspired Humanoid Foot Mechanism. Applied Sciences. 2021; 11(4):1686. https://doi.org/10.3390/app11041686
Chicago/Turabian StyleRusso, Matteo, Betsy D. M. Chaparro-Rico, Luigi Pavone, Gabriele Pasqua, and Daniele Cafolla. 2021. "A Bioinspired Humanoid Foot Mechanism" Applied Sciences 11, no. 4: 1686. https://doi.org/10.3390/app11041686
APA StyleRusso, M., Chaparro-Rico, B. D. M., Pavone, L., Pasqua, G., & Cafolla, D. (2021). A Bioinspired Humanoid Foot Mechanism. Applied Sciences, 11(4), 1686. https://doi.org/10.3390/app11041686