
Bifurcation Flight Dynamic Analysis of a Strake-Wing Micro Aerial Vehicle



Abstract
1. Introduction
2. Bifurcation and Continuation Analysis
2.1. Bifurcation Theory and Bifurcation Types
- -
- trajectory x(t) fulfils the condition: |x(t)| < ε for t > 0;
- -
- |x(t)| → 0 for t → ∞.
- A.
- A saddle-node bifurcation, also called a saddle limit point, occurs when the real eigenvalue of a Jacobian matrix (5) estimated in a state of equilibrium, intersects the imaginary axis. There is no equilibrium on one side of the bifurcation point (locally), whereas there are two equilibrium branches on the other (e.g., one stable and one unstable) (Figure 1).
- B.
- Hopf bifurcation occurs, when a complex pair of Jacobian (5) eigenvalues, assessed at equilibrium, intersect the imaginary axis. In this case, the equilibrium changes stability and a periodic orbit is formed, which can be stable or unstable (Figure 1).
- C.
- The limit point or periodic orbit fold bifurcation occur when the real Floquet multiplier intersects the unit circle at 1; as for the states of equilibrium, then there are no periodic orbits on one side of the bifurcation (locally), whereas there are two periodic orbits on the other (Figure 1).
- D.
- A period-doubling bifurcation occurs when the real Floquet multiplier intersects the unit circle at −1. The periodic orbit loses stability when a new period orbit appears with a period (approximately) twice as long (Figure 1).
- E.
- The Neimark-Sacker bifurcation or torus bifurcation appears, when the periodic orbit becomes unstable, namely, when a pair of complex Floquet multipliers intersects the unit circle and an additional oscillation frequency is introduced. The outcome is a torus dynamic, which can be periodic (blocked) or quasi-periodic (Figure 1).
2.2. Continuation Software
- -
- numerical instabilities associated with calculations in close proximity to bifurcation points,
- -
- issues related to parametrization in close proximity to bifurcation points and limit points,
- -
- structures of bifurcation branches,
- -
- determination whether bifurcation actually takes place,
- -
- problems associated with the convergence of the Newton-Raphson method at singular points.
3. Micro Aerial Vehicle Mathematical Model
3.1. Reference Frames
3.2. Equations of Motion
4. Methodology of Bifurcation Tests in Aircraft Flight Dynamics
- The first stage involves determining all parameters of a dynamical system. The fundamental task is to study all possible equilibrium states and periodic orbits, and the analysis of their local stability. This test should be very thorough. The outcome of the attempted test should be a determined global structure of the state space (e.g., phase portraits) of all discovered attractors (steady states and closed orbits). Approximated graphic representations of the calculations are crucial in this case, since they enable diagnosing the obtained results.
- The second stage involves, based on information on the evolution of phase portraits together with parameter changes, predicting dynamical system behaviour. Next, based on the knowledge on the type of present bifurcations and the current position of system parameters relative to stable areas, further aircraft behaviour is predicted. Information on the range of parameter changes is also important for these analyses and predictions. Rapid parameter changes and higher differences between steady and transient states are also observed.
- The third step involves a numerical simulation, which enables verification of the expected aircraft behaviour. Waveforms of transient system characteristics for significant state parameter changes upon a dynamical system parameter change are obtained.
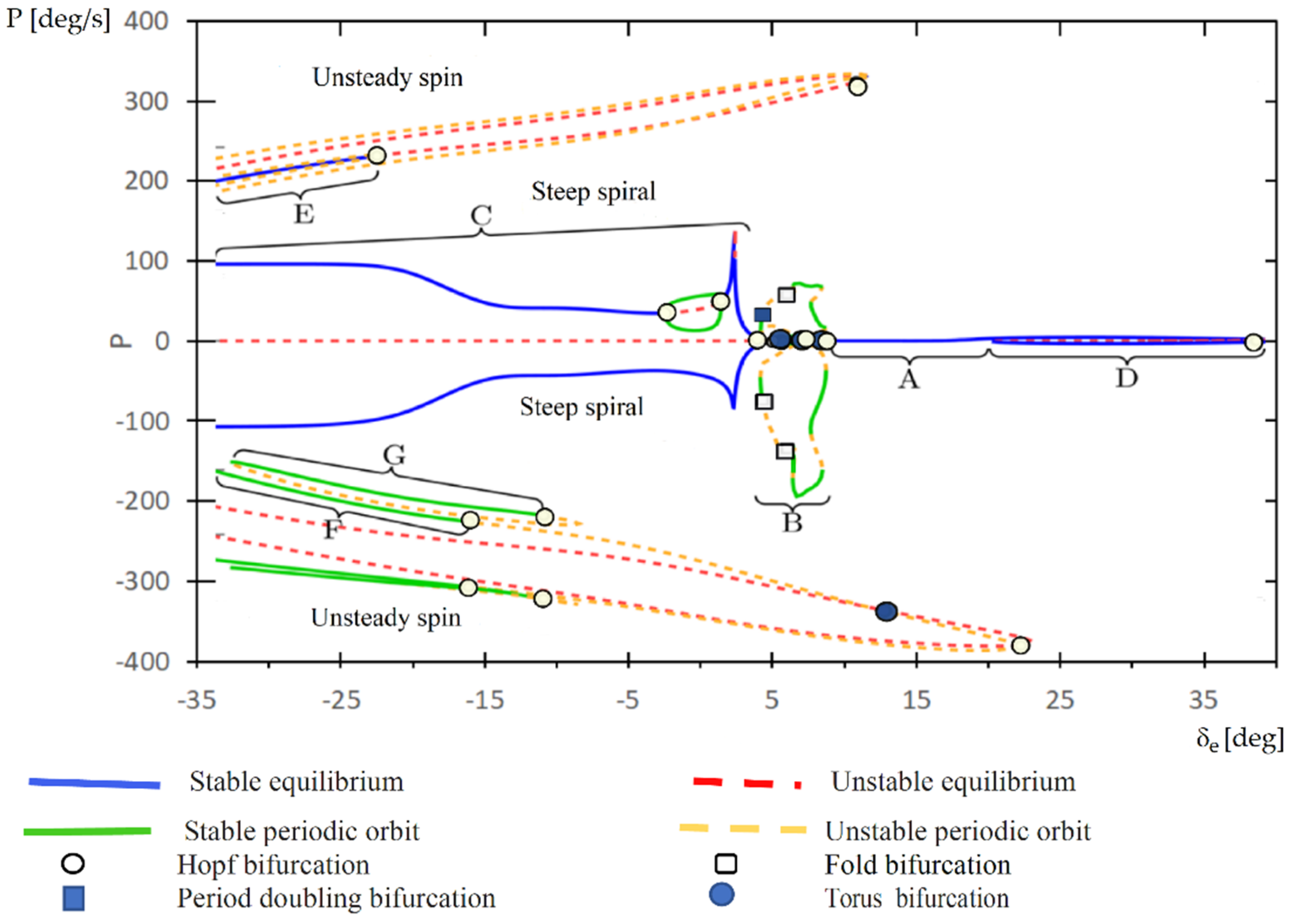
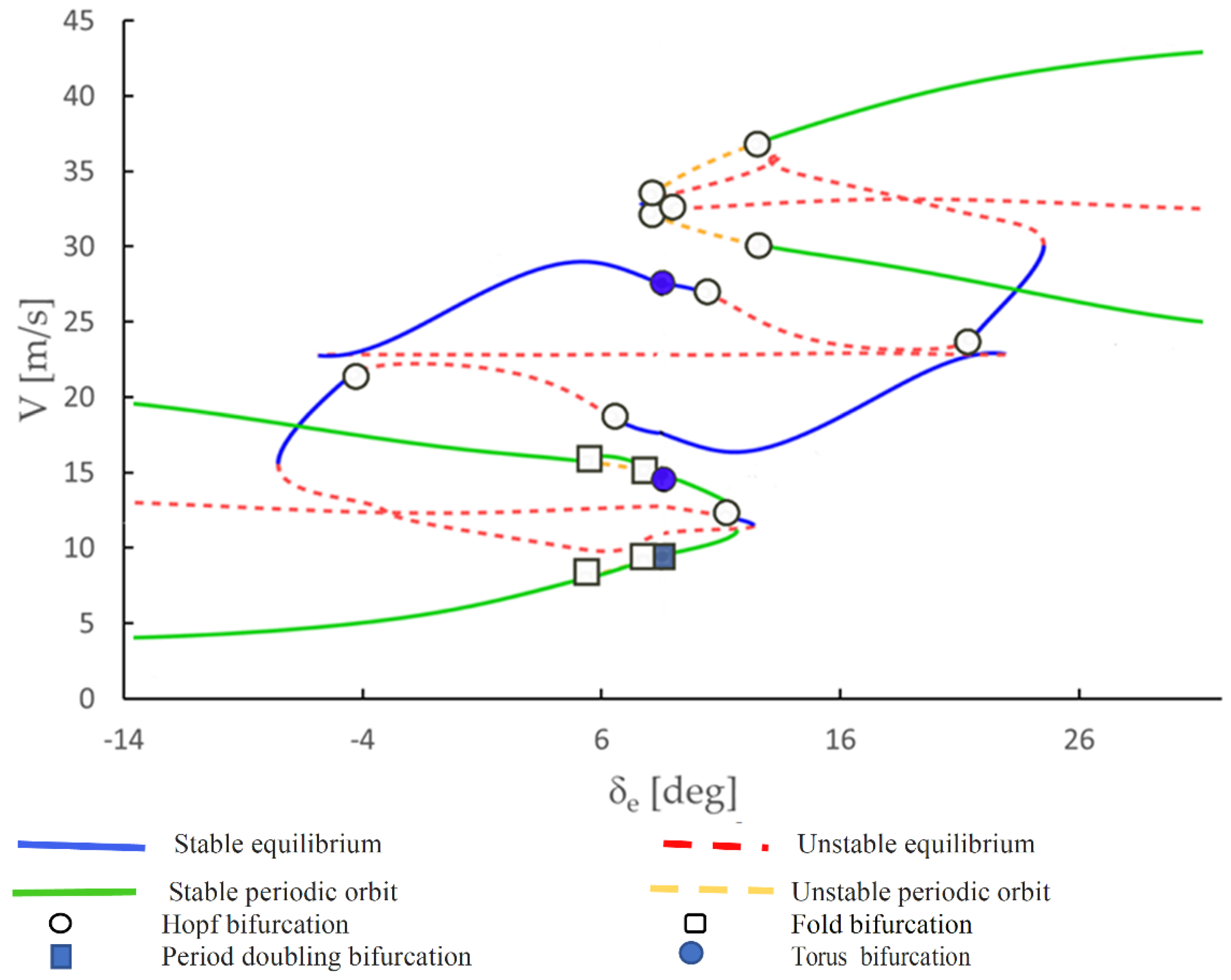
5. Bifurcation Flight Dynamic Analysis of a Micro Aerial Vehicle
6. Numerical Verification of Predicted MAV Behaviour
6.1. “Wing Rock” Oscillation Simulation
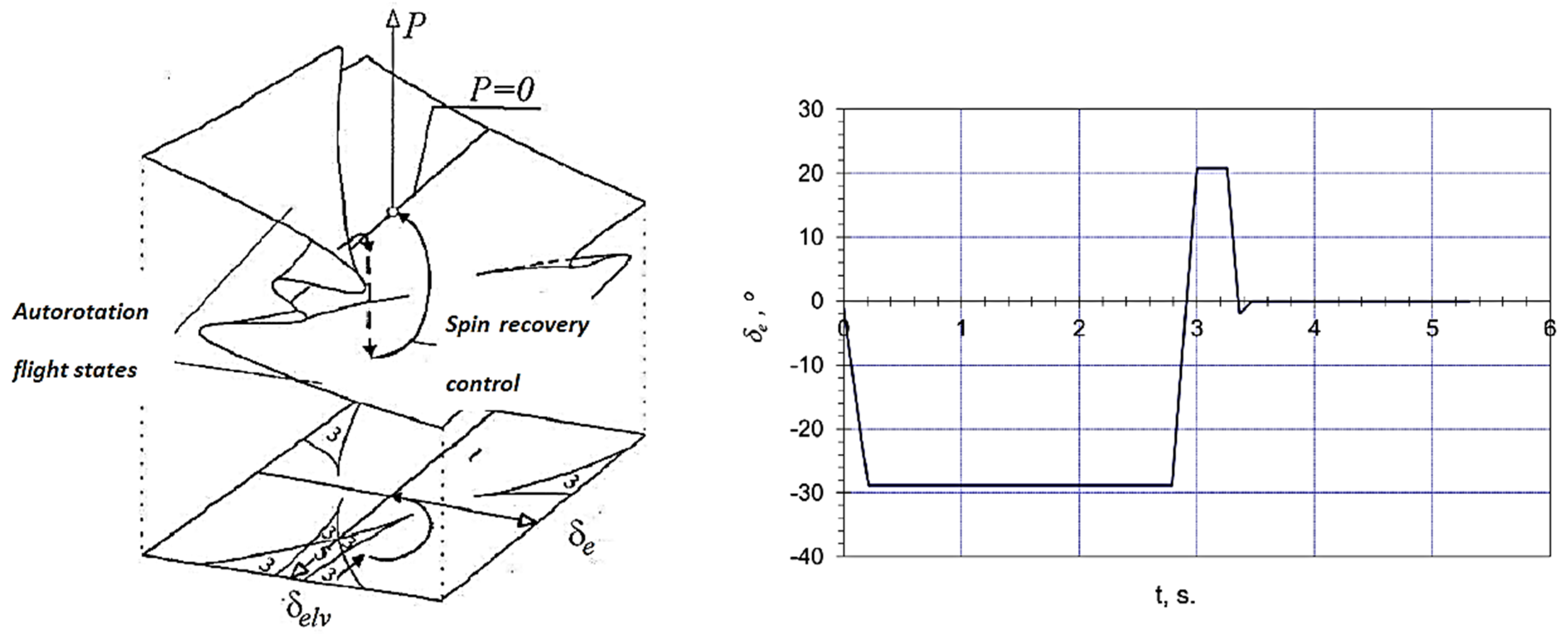
6.2. MAV Spin Simulation
6.3. “Cobra” Manoeuvre Simulation
- Transition from horizontal flight into the phase of increasing the aircraft pitch angle, due to very rapid increase in the elevator deflection angle (sudden pulling of the control stick to a maximum), while simultaneously throttling the engine or engines,
- manoeuvre phase in which, as a result of such action by the pilot, the aircraft nose rapidly rises up, until it reaches a very high angle of attack (even up to 120°),
- the exit phase, which involves increasing the thrust and releasing the control stick, leading to the aircraft rapidly increasing its pitch angle, while simultaneously accelerating and returning to horizontal flight, with a minor altitude loss.
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| Cl | body axis rolling moment coefficient |
| Clp | rolling moment coefficient derivative with respect to to rolling rate |
| Cm | body axis pitching moment coefficient |
| Cmα | pitching moment coefficient derivative with respect to angle of attack |
| Cmq | pitching moment coefficient derivative with respect to pitching angular rate |
| Cn | body axis yawing moment coefficient |
| Cnr | yawing moment coefficient derivative with respect to to yawing rate |
| f | reduced frequency of model oscillation in water tunnel |
| f | vector of generic nonlinear function |
| fi, i=1,…8 | components of f vector describing microdrone flight dynamics |
| g | acceleration of gravity |
| J | Jacobi matrix |
| JX, JY, JZ, JXZ | moments of inertia of microdrone |
| LT | body axis banking moment due to propulsion |
| m | mass of microdrone |
| MT | body axis pitching moment due to propulsion |
| NT | body axis yawing moment due to propulsion |
| V, V0 | flight velocity |
| P | body axia roll (banking) rate |
| PXa | x wind axis aerodynamic force component |
| PYa | y wind axis aerodynamic force component |
| PZa | z wind axis aerodynamic force component |
| q | dynamic pressure |
| Q | body axis pitching rate |
| R | body axis yawing rate |
| R | state matrix (Jacobian of linearised aircraft equations of motion) |
| S | wing area |
| T | propeller thrust |
| α | angle of attack |
| β | slip angle |
| δe | angle of symmetrical elevon deflection |
| δelv | angle of asymmetrical elevon deflection |
| Θ | pitch angle |
| λ | eigenvalue |
| μ | vector of bifurcation parameters (in this case microdrone control vector) |
| μ | single bifurcation parameter |
| ρ | air density |
| Ф | bank (roll) angle |
| Ψ | yaw (heading) angle |
| time derivative | |
| dimensionless quantity | |
| MAV | micro aerial vehicle, microdrone, micro aircraft |
References
- Abdulrahim, M.; Watkins, S.; Segal, R.; Sheridan, J. Dynamic sensitivity to atmospheric turbulence of Fixed-Wing UAV with varying configuration. J. Aircr. 2010, 47, 1873–1883. [Google Scholar] [CrossRef]
- Wróblewski, W.; Sibilski, K.; Garbowski, M.; Żyluk, A. The gust resistant MAV—Aerodynamic measurements, performance analysis, and flight tests (AIAA2015—1684 CP). In Proceedings of the AIAA SciTech Forum and AIAA Atmospheric Flight Mechanics Conference, Kissimmee, FL, USA, 5–9 January 2015. [Google Scholar] [CrossRef]
- Kowalski, M.; Sibilski, K.; Żyluk, A. Studies and tests of micro aerial vehicle during flight. J. KONES 2015, 22, 155–162. [Google Scholar] [CrossRef]
- Adams, W.W. SPINEQ: A Program for Determining Aircraft Equilibrium Spin Characteristics Including Stability, 1979, NASA TM 78759; The National Aeronautics and Space Administration: Washington, DC, USA, 1978. Available online: https://ntrs.nasa.gov/api/citations/19790002903/downloads/19790002903.pdf (accessed on 5 January 2021).
- Schy, A.A.; Hannaht, M.F. Prediction of Jump Phenomena in Roll-Coupled Maneuvers of Airplanes. J. Aircr. 1977, 14, 375–382. [Google Scholar] [CrossRef]
- Roberts, L.; Hamel, P.; Orlik-Ruckeman, K.J. (Eds.) AGARD CP-386 Unsteady Aerodynamics-Fundamental and Applications to Aircraft Dynamics; North Atlantic Treaty Organization Advisory Group for Aerospace Research and Development: Neuilly-sur-Seine, France, 1985; ISBN 92-835-0382-1. Available online: https://apps.dtic.mil/dtic/tr/fulltext/u2/a165045.pdf (accessed on 3 January 2021).
- Tobak, M.; Schiff, L.B. On the Formulation of the Aerodynamic Characteristics in Aircraft Dynamics, NASA TR-R-456; The National Aeronautics and Space Administration: Washington, DC, USA, 1976. Available online: https://ntrs.nasa.gov/api/citations/19760007994/downloads/19760007994.pdf (accessed on 5 January 2021).
- Tobak, M.; Schiff, L.B. The Role of Time-History Effects in the Formulation of the Aerodynamics of Aircraft Dynamics, NASA TM 78471; The National Aeronautics and Space Administration: Washington, DC, USA, 1978. Available online: https://ntrs.nasa.gov/citations/19780011113 (accessed on 5 January 2021).
- Hui, W.; Tobak, M. Bifurcation analysis of nonlinear stability of aircraft at high angles of attack, (AIAA 82-244 CP). In Proceedings of the 20th AIAA Aerospace Sciences Meeting, Orlando, FL, USA, 11–14 January 1982. [Google Scholar] [CrossRef]
- Carroll, J.V.; Mehra, R.K. Bifurcation analysis of non-linear aircraft dynamics. J. Guid. Contro Dyn. 1982, 5, 529–536. [Google Scholar] [CrossRef]
- Tobak, M.; Ünal, A. Bifurcation in Unsteady Aerodynamics, NASA TM 8316; The National Aeronautics and Space Administration: Washington, DC, USA, 1986. Available online: https://ntrs.nasa.gov/api/citations/19870002264/downloads/19870002264.pdf (accessed on 5 January 2021).
- Guicheteau, P. Bifurcation theory in flight dynamics and application to a real combat aircraft (ICAS-90-5.10.4 CP). In Proceedings of the 17th ICAS Congress, Stockholm, Sweden, 9–17 September 1990; Available online: https://www.icas.org/ICAS_ARCHIVE/ICAS1990/ICAS-90-5.10.4.pdf (accessed on 5 January 2021).
- Guicheteau, P. Bifurcation theory: A tool for nonlinear flight dynamics. Phil. Trans. R. Soc. Lond. A 1998, 356, 2181–2201. [Google Scholar] [CrossRef]
- Mehra, R.; Prasanth, R. Bifurcation and limit cycle analysis of nonlinear pilot induced oscillations (AIAA 98-4249 CP). In Proceedings of the 23rd AIAA Atmospheric Flight Mechanics Conference, Boston, MA, USA, 10–12 August 1998. [Google Scholar] [CrossRef]
- Wiggins, S. Introduction to Applied Nonlinear Dynamical Systems and Chaos, 2nd ed.; Springer: New York, NY, USA, 2003; ISBN 0-387-00177-8. Available online: https://www.springer.com/gp/book/9780387001777 (accessed on 5 January 2021).
- Tobak, M. On the Use of the Indicial Function Concept in the Analysis of Unsteady Motions of Wings and Wing-Tail Combinations; NACA Report 1188; The National Aeronautics and Space Administration: Washington, DC, USA, 1954. Available online: https://digital.library.unt.edu/ark:/67531/metadc65696/ (accessed on 5 January 2021).
- Kuznetsov, Y.A. Elements of Applied Bifurcation Theory; Springer: New York, NY, USA, 1998; ISBN 0-387-98382-1. Available online: https://www.springer.com/gp/book/9780387219066 (accessed on 5 January 2021).
- Ioos, G.; Joseph, D. Elementary Stability and Bifurcation Theory, 2nd ed.; Springer: New York, NY, USA, 2002; ISBN 978-1-4612-7020-2. Available online: https://link.springer.com/book/10.1007/978-1-4612-1140-2 (accessed on 5 January 2021).
- Keller, H.B.; Langford, W.F. Iterations, perturbations and multiplicities for nonlinear bifurcation problems. Arch. Ration. Mech. Anal. 1972, 48, 83–108. [Google Scholar] [CrossRef]
- Keller, H.B. Lecture Notes on Numerical Methods in Bifurcation Problems; Springer: New York, NY, USA, 1987; ISBN 3-540-20228-5. [Google Scholar]
- Abed, E.H.; Lee, H. Nonlinear Stabilization of High Angle-of-Attack Flight Dynamics using Bifurcation Control. In Proceedings of the 1990 American Control Conference, San Diego, CA, USA, 23–25 May 1990; pp. 2235–2238. [Google Scholar] [CrossRef]
- Avanzini, G.; de Matteis, G. Bifurcation analysis of a highly augmented aircraft model. J. Guid. Control Dyn. 1997, 20, 754–759. [Google Scholar] [CrossRef]
- Charles, G.; Lowenberg, M.; Stoten, D.; Wang, X.; di Bernardo, M. Aircraft Flight Dynamics Analysis and Controller Design Using Bifurcation Tailoring (AIAA-2002-4751 CP). In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Monterey, CA, USA, 5–8 August 2002. [Google Scholar] [CrossRef]
- Goman, M.G.; Khramtsovsky, A.V. Application of continuation and bifurcation methods to the design of control systems. Philos. Trans. R. Soc. Lond. A 1998, 356, 2277–2294. [Google Scholar] [CrossRef]
- Goman, M.G.; Zagainov, G.I.; Khramtsovsky, A.V. Application of bifurcation methods to nonlinear flight dynamics problems. Prog. Aerosp. Sci. 1997, 33, 9–10, 539–586. [Google Scholar] [CrossRef]
- Gill, S.J.; Lowenberg, M.H.; Neild, S.A.; Krauskopf, B.; Puyou, G.; Coetzee, E. Upset Dynamics of an Airliner Model: A Nonlinear Bifurcation Analysis. J. Aircr. 2013, 50, 1832–1842. [Google Scholar] [CrossRef]
- Gill, S.J.; Lowenberg, M.H.; Neild, S.A.; Crespo, L.G.; Krauskopf, B.; Puyou, G. Nonlinear Dynamics of Aircraft Controller Characteristics Outside the Standard Flight Envelope, J. Guid. Control Dyn. 2015, 38, 2301–2308. [Google Scholar] [CrossRef]
- Eaton, A.J.; Howcroft, C.; Coetzee, E.B.; Neild, S.A.; Lowenberg, M.H.; Cooper, J.E. Numerical Continuation of Limit Cycle Oscillations and Bifurcations in High-Aspect-Ratio Wings. Aerospace 2018, 5, 78. [Google Scholar] [CrossRef]
- Angiulli, G.; Calcagno, S.; De Carlo, D.; Laganá, F.; Versaci, M. Second-Order Parabolic Equation to Model, Analyze, and Forecast Thermal-Stress Distribution in Aircraft Plate Attack Wing–Fuselage. Mathematics 2020, 8, 6. [Google Scholar] [CrossRef]
- Awrejcewicz, J.; Pyryev, J.; Kudra, G.; Olejnik, P. Mathematical and Numerical Methods of Bifurcation and Chaotic Dynamics Analysis of Mechanical Systems with Friction and Impact; Publishing House of the Lodz University of Technology: Łódź, Poland, 2006; ISBN 83-7283-173-4. (In Polish) [Google Scholar]
- Guckenheimer, J.; Holmes, P. Non-Linear Oscillators, Dynamical Systems, and Bifurcations of Vector Fields; Springer: New York, NY, USA, 2002; ISBN 978-1-4612-7020-1. Available online: https://link.springer.com/book/10.1007/978-1-4612-1140-2 (accessed on 5 January 2021).
- Magnitskii, N.A.; Sidorov, S.V. New Methods for Chaotic Dynamics; World Scientific Series on Nonlinear Science Series A: Singapore, 2006; Volume 58, ISBN 978-981-256-817-5. [Google Scholar] [CrossRef]
- Available online: https://sourceforge.net/projects/matcont/files/matcont/ (accessed on 5 January 2021).
- Dhooge, A.W.; Govaerts, W.; Kuznetsov Yu, A. Matconta: Matlab Package for Numerical Bifurcation Analysis of ODEs. ACM Trans. Math. Softw. 2003, 29, 141–164. [Google Scholar] [CrossRef]
- Goman, M.G.; Khramtsovsky, A.V. Computational framework for investigation of aircraft nonlinear dynamics. Adv. Eng. Softw. 2008, 39, 167–177. [Google Scholar] [CrossRef][Green Version]
- Available online: http://indy.cs.concordia.ca/auto/ (accessed on 5 January 2021).
- Doedel, E.J.; Fairgrieve, T.F.; Champneys, A.R.; Sandstede, B.; Kuznetsov, Y.A.; Wang, X. Auto97: Continuation and Bifurcation Software for Ordinary Differential Equations (with HomCont); Technical Report for Concordia University: Montreal, QC, Canada, 1998; Available online: http://citeseerx.ist.psu.edu/viewdoc/summary?doi=10.1.1.44.9955 (accessed on 5 January 2021).
- Doedel, E.; Keller, H.B.; Kernevez, J.P. Numerical analysis and control of bifurcation problems. Int. J. Bifurc. Chaos 1991, 1, 493–520. [Google Scholar] [CrossRef]
- Doedel, E.J.; Oldeman, B.E. AUTO-07P: Continuation and Bifurcation Software for Ordinary Differential Equations; Technical Report for Concordia University: Montreal, QC, Canada, 2009; Available online: https://www.macs.hw.ac.uk/~gabriel/auto07/auto.html (accessed on 5 January 2021).
- Available online: http://www.math.pitt.edu/~bard/xpp/xpp.html (accessed on 5 January 2021).
- Ermentrout, B. Simulating, Analyzing, and Animating Dynamical Systems. A Guide to XPPAUT for Researchers and Students; SIAM: Philadephia, PA, USA, 2002; ISBN 978-0-89871-819-5. Available online: https://epubs.siam.org/doi/abs/10.1137/1.9780898718195 (accessed on 5 January 2021).
- Available online: https://www.mathworks.com/matlabcentral/fileexchange/32210-dynamical-systems-toolbox (accessed on 5 January 2021).
- Coetzee, E.B.; Krauskopf, B.; Lowenberg, M.H. The Dynamical Systems Toolbox: Integrating AUTO into MATLAB. In Proceedings of the 16th U.S. National Congress of Theoretical and Applied Mechanics, State College, PA, USA, 27 June–2 July 2010. [Google Scholar]
- Etkin, B.; Reid, L.D. Dynamics of Atmospheric Flight, 3rd ed.; John Willey & Sons Inc.: Hoboken, NJ, USA, 1996; ISBN 0-471-03418-5. [Google Scholar]
- Pamadi, B.N. Performance, Stability, Dynamics, and Control of Airplanes, 2nd ed.; AIAA: Reston, VA, USA, 2003; ISBN 978-1-62410-274-5. [Google Scholar] [CrossRef]
- Schmidt, L. Introduction to Flight Dynamics; AIAA, Ed.; Series AIAA: Reston, VA, USA, 1998; ISBN 1-56347-226-0. [Google Scholar] [CrossRef]
- Zipfel, P.H. Modeling and Simulation of Aerospace Vehicle Dynamics; AIAA, Ed.; Series AIAA: Reston, VA, USA, 2003; ISBN 978-1-62410-250-9. [Google Scholar] [CrossRef]
- Sibilski, K. Modeling and Simulation of Flying Vehicles Dynamics; MH Publishing House: Warsaw, Poland, 2004; ISBN 83-906620-8-6. [Google Scholar]
- Sibilski, K.; Lasek, M.; Sibilska-Mroziewicz, A.; Garbowski, M. Dynamics of Flight of Fixed Wings Micro Aerial Vehicle; Warsaw University of Technology Publishing House: Warsaw, Poland, 2020; ISBN 978-83-8156-124-2. [Google Scholar]
- Sibilski, K.; Nowakowski, M.; Rykaczewski, D.; Szczepaniak, P.; Żyluk, A.; Sibilska-Mroziewicz, A.; Garbowski, M.; Wróblewski, W. Identification of Fixed-Wing Micro Aerial Vehicle Aerodynamic Derivatives from Dynamic Water Tunnel Tests. Aerospace 2020, 7, 116. [Google Scholar] [CrossRef]
- Abramov, N.; Goman, M.; Khrabrov, A. Aircraft dynamics at high incidence flight with account of unsteady aerodynamic effects. In Proceedings of the AIAA Meeting Papers, AIAA Aymospheric Flight Mrchanics Conference and Exhibit, AIAA 2004-5274 CP, Providence, RI, USA, 16–19 August 2004. [Google Scholar] [CrossRef]
- Abramov, A.N.; Goman, M.; Khrabrov, A.; Kolesnikov, E.; Fucke, L.; Soemarwoto, B.; Smaili, H. Pushing Ahead—SUPRA Airplane Model for Upset Recovery. In Proceedings of the AIAA Modeling and Simulation Technologies Conference, (AIAA 2012-4631 CP), Minneapolis, MN, USA, 13–16 August 2012. [Google Scholar] [CrossRef]
- Pauck, S.; Jacobus Engelbrecht, J. Bifurcation Analysis of the Generic Transport Model with a view to Upset Recovery. In Proceedings of the AIAA Meeting Papers, AIAA Atmospheric Flight Mechanics Conference, AIAA 2012-4646, Minneapolis, MN, USA, 13–16 August 2012. [Google Scholar] [CrossRef]
- Cunis, T.; Condomines, J.-P.; Burlion, L.; la Cour-Harbo, A. Dynamic Stability Analysis of Aircraft Flight in Deep Stall. J. Aircr. 2020, 57, 143–155. [Google Scholar] [CrossRef]
- Jahnke, C.C.; Culick, F.E.C. Application of Bifurcation Theory to the High-Angle-of-Attack Dynamics of the F-14. J. Aircr. 1993, 31, 26–34. [Google Scholar] [CrossRef]
- Jahnke, C.C. On the Roll-Coupling Instabilities of High-Performance Aircraft. Phil. Trans. R. Soc. Lond. A 1998, 356, 2223–2239. [Google Scholar] [CrossRef]
- Dul, F.; Lichota, P.; Rusowicz, A. Generalized Linear Quadratic Control for Full Tracking Problem in Aviation. Sensors 2020, 20, 2955. [Google Scholar] [CrossRef] [PubMed]
- Lichota, P. Multi-Axis Inputs for Identification of a Reconfigurable Fixed-Wing UAV. Aerospace 2020, 7, 113. [Google Scholar] [CrossRef]
- Liebst, B.S. The dynamics, prediction, and control of wing rock in high-performance aircraft. Phil. Trans. R. Soc. Lond. A 1998, 356, 2257–2276. [Google Scholar] [CrossRef]
- Pietrucha, J. Modern Techniques for Active Modification of the Aircraft Dynamic Behaviour. J. Theor. Appl. Mech. 2000, 38, 132–156. Available online: http://www.ptmts.org.pl/jtam/index.php/jtam/article/view/v38n1p131 (accessed on 5 January 2021).
- Galiński, C.; Mieloszyk, J. Results of the Gust resistant MAV Programme. In Proceedings of the 28th International Congress of the International Council of the Aeronautical Sciences, Brisbane, Australia, 23–28 September 2012; Paper ICAS 2012-3.1.1. Available online: http://www.icas.org/ICAS_ARCHIVE/ICAS2012/PAPERS/186.PDF (accessed on 5 January 2021).
- Dżygadło, Z.; Kowaleczko, G.; Sibliski, K. Method of Control of a Straked Wing Aircraft for Cobra Manoeuvres. In Proceedings of the 20th Congress of International Council of Aeronautical Sciences, ICAS’96, Sorrento, Italy, 8–13 September 1996; Paper ICAS-96-3. 7.4. pp. 1566–1573, ISBN 1 56347-219-8. Available online: https://www.icas.org/ICAS_ARCHIVE/ICAS1996/ICAS-96-3.7.4.pdf (accessed on 5 January 2021).
- Sibilski, K. An Agile Aircraft Non-Linear Dynamics by Continuation Methods and Bifurcation Theory. In Proceedings of the 22nd Congress of International Council of Aeronautical Sciences, ICAS’2000, Harrogate, UK, 27 August–1 September 2000; Paper ICAS-2000-3. 11.2. ISBN 0 9533991 2 5. Available online: https://www.icas.org/ICAS_ARCHIVE/ICAS2000/ABSTRACTS/ICA3112.HTM (accessed on 5 January 2021).



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nowakowski, M.; Sibilski, K.; Sibilska-Mroziewicz, A.; Żyluk, A. Bifurcation Flight Dynamic Analysis of a Strake-Wing Micro Aerial Vehicle. Appl. Sci. 2021, 11, 1524. https://doi.org/10.3390/app11041524
Nowakowski M, Sibilski K, Sibilska-Mroziewicz A, Żyluk A. Bifurcation Flight Dynamic Analysis of a Strake-Wing Micro Aerial Vehicle. Applied Sciences. 2021; 11(4):1524. https://doi.org/10.3390/app11041524
Chicago/Turabian StyleNowakowski, Mirosław, Krzysztof Sibilski, Anna Sibilska-Mroziewicz, and Andrzej Żyluk. 2021. "Bifurcation Flight Dynamic Analysis of a Strake-Wing Micro Aerial Vehicle" Applied Sciences 11, no. 4: 1524. https://doi.org/10.3390/app11041524
APA StyleNowakowski, M., Sibilski, K., Sibilska-Mroziewicz, A., & Żyluk, A. (2021). Bifurcation Flight Dynamic Analysis of a Strake-Wing Micro Aerial Vehicle. Applied Sciences, 11(4), 1524. https://doi.org/10.3390/app11041524