Zero-Dynamics Attack on Wind Turbines and Countermeasures Using Generalized Hold and Generalized Sampler




Abstract
1. Introduction
2. Dynamic Model of Wind Turbine
2.1. Dynamic Model of Wind Turbine
2.2. Discrete-Time Linear Model
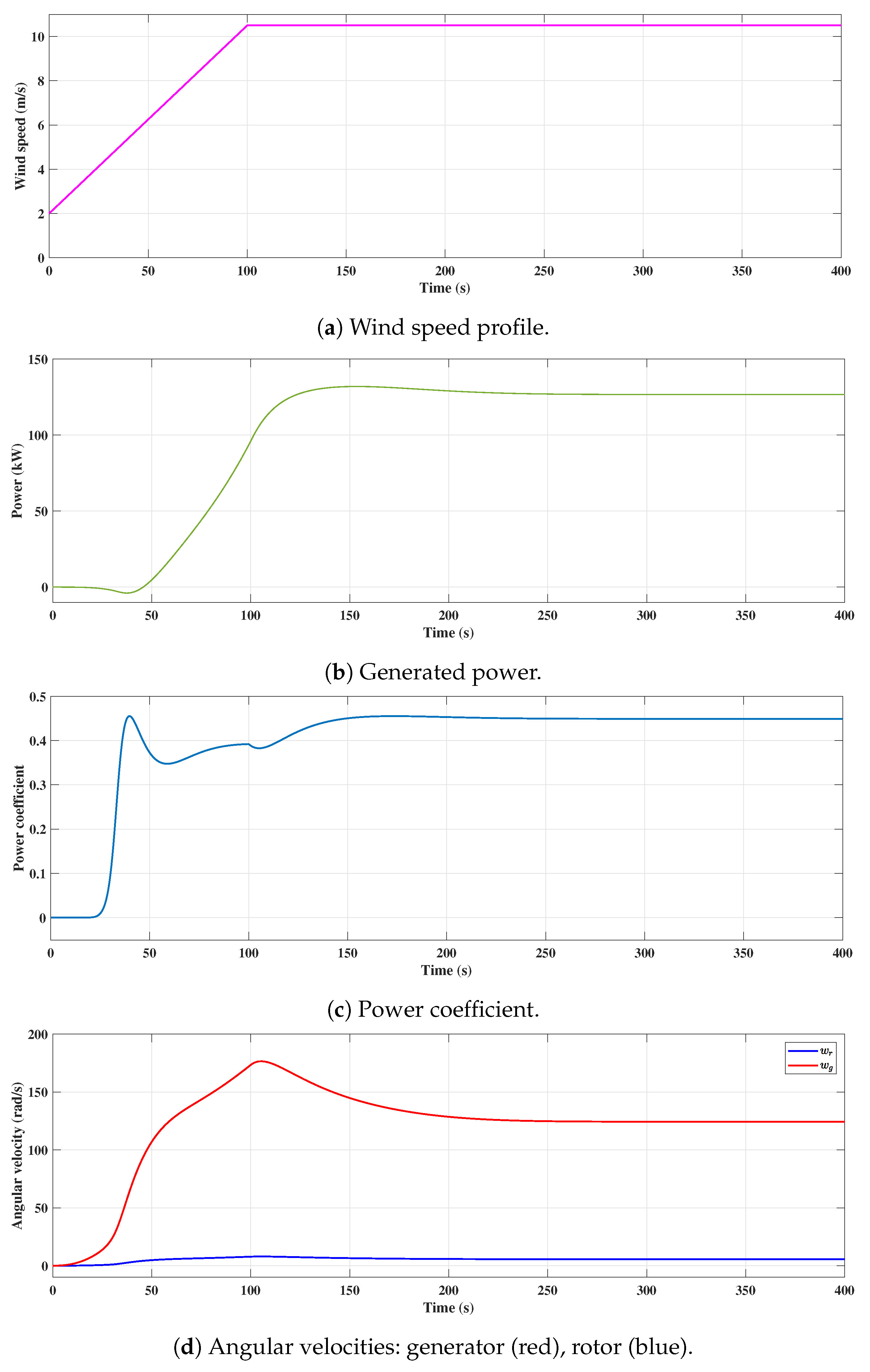
2.3. Wind Turbine Simulation Model and Its Behavior under Normal Condition
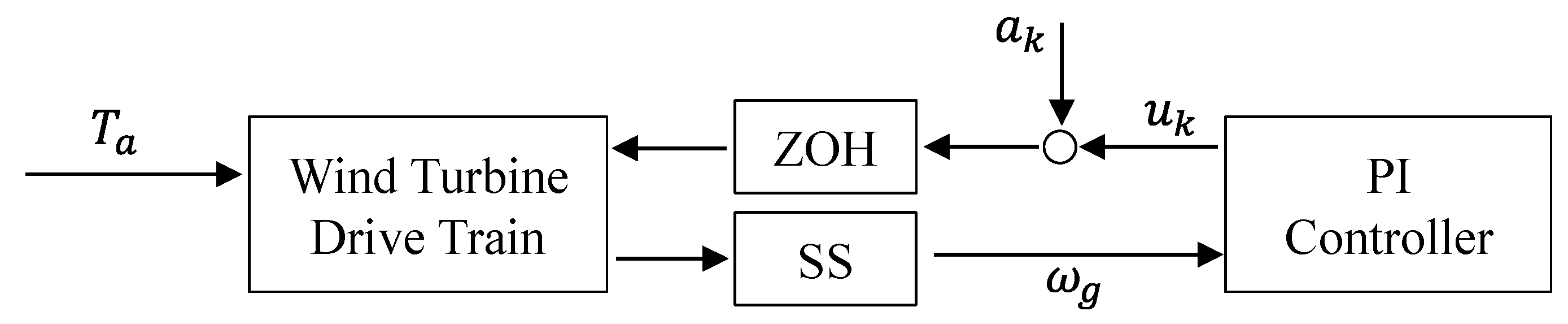
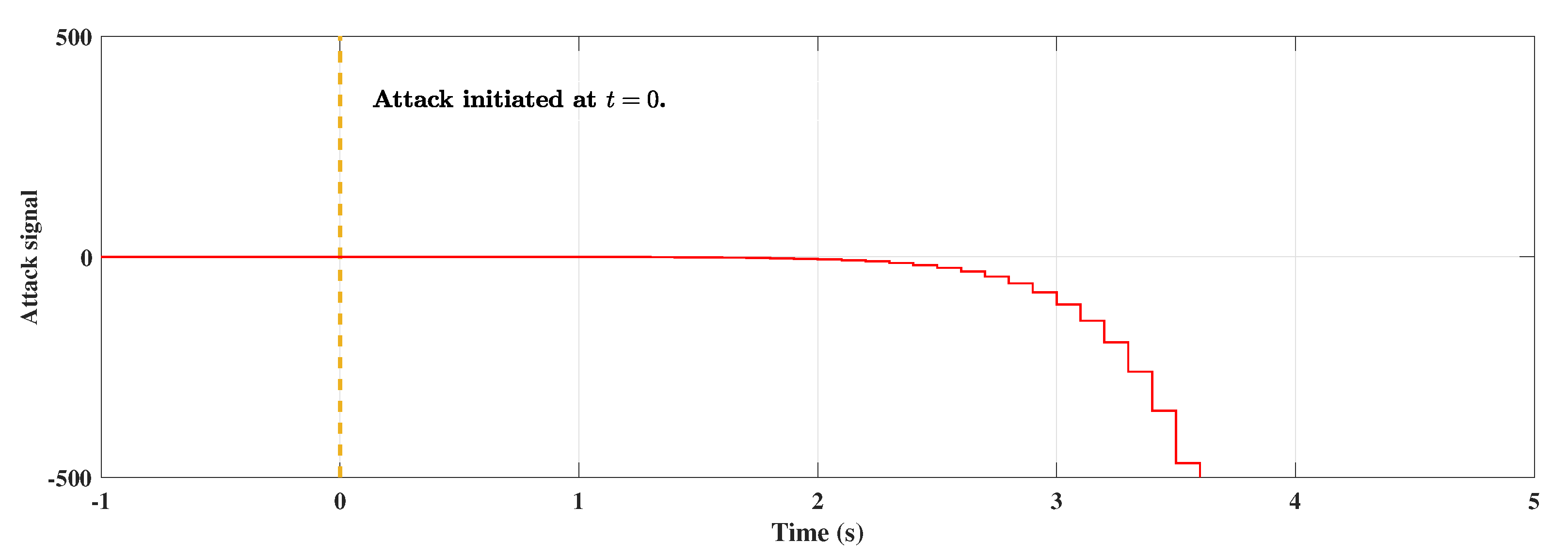
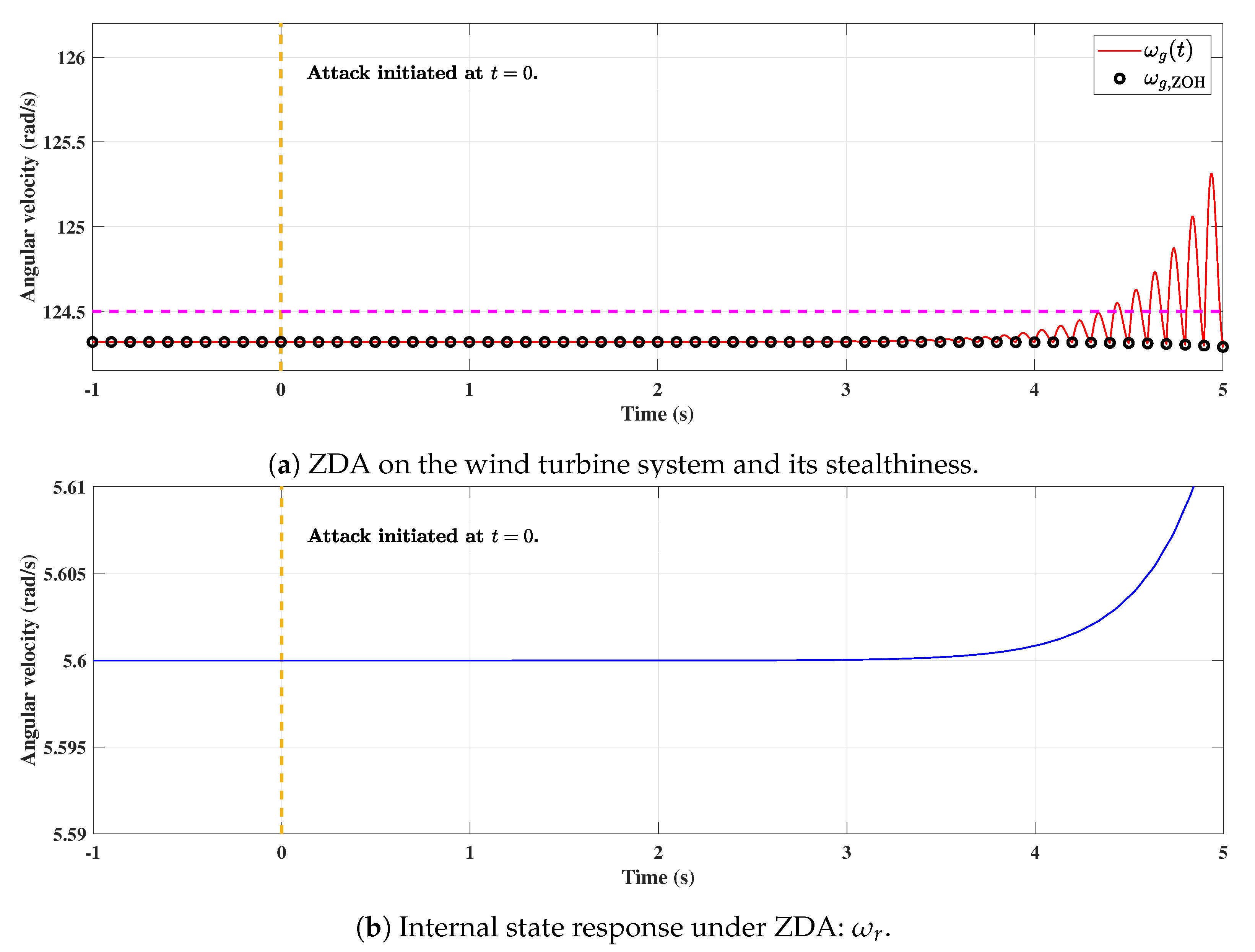
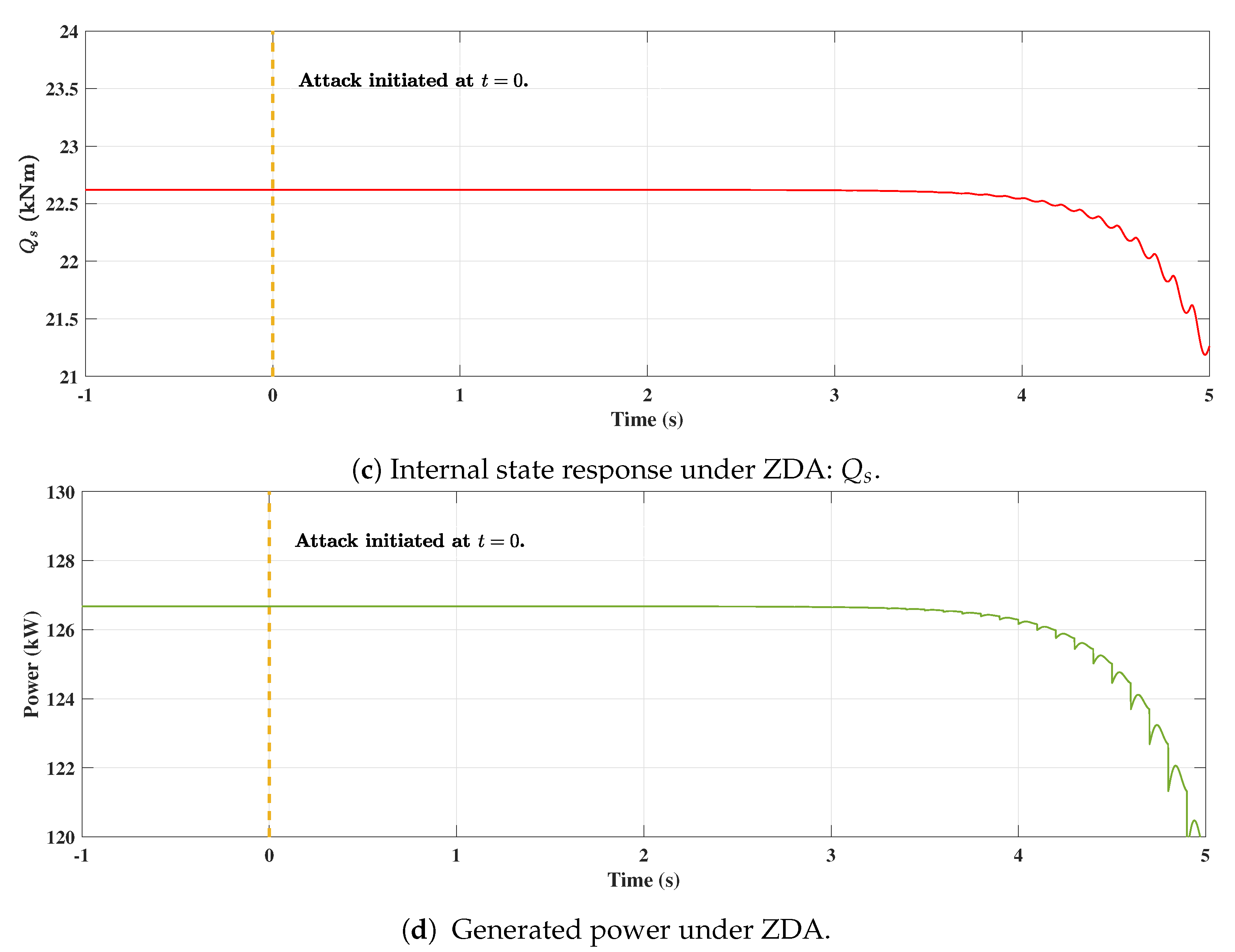
3. Zero-Dynamics Attack on Wind Turbine
4. Two Countermeasures against Zero-Dynamics Attack
4.1. Generalized-Hold-Based Strategy
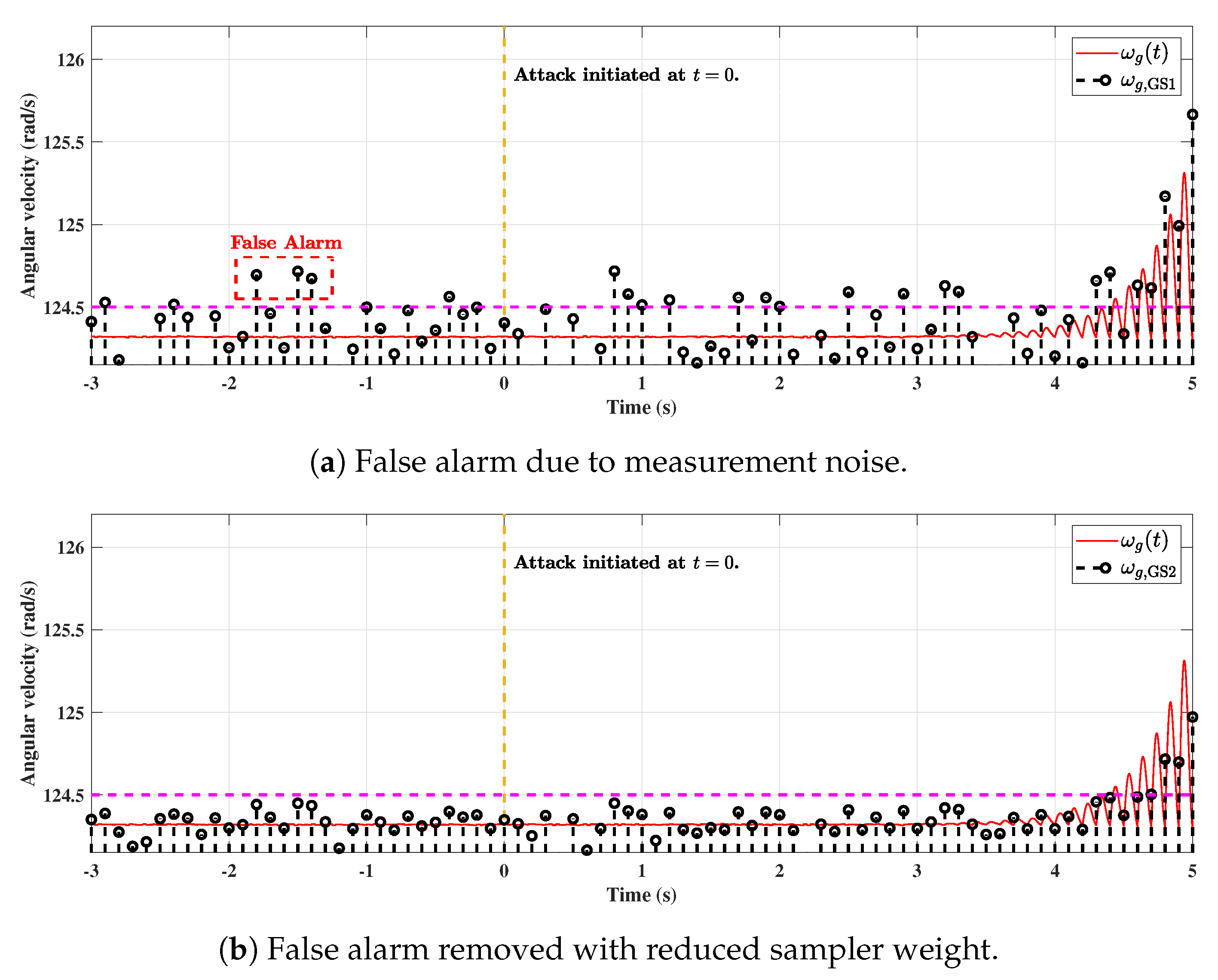
4.2. Generalized-Sampler-Based Approach
5. Evaluation of Countermeasures against ZDA
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- International Renewable Energy Association. Future of Wind: Deployment, Investment, Technology, Grid Integration and Socio-Economic Aspects (A Global Energy Transformation Paper); International Renewable Energy Agency: Abu Dhabi, United Arab Emirates, 2017. [Google Scholar]
- Lee, R.M.; Assante, M.J.; Conway, T. German steel mill cyber attack. Ind. Control. Syst. 2014, 30, 62. [Google Scholar]
- Kesler, B. The vulnerability of nuclear facilities to cyber attack. Strateg. Insights 2011, 10, 15–25. [Google Scholar]
- Alert, I.C. Cyber-Attack against Ukrainian Critical Infrastructure; Tech. Rep. ICS Alert (IR-ALERT-H-16-056-01); Cybersecurity Infrastruct. Secur. Agency: Washington, DC, USA, 2016. [Google Scholar]
- Cárdenas, A.A.; Amin, S.; Lin, Z.S.; Huang, Y.L.; Huang, C.Y.; Sastry, S. Attacks Against Process Control Systems: Risk Assessment, Detection, and Response. In Proceedings of the 6th ACM Symposium on Information, Computer and Communications Security (ASIACCS ’11), Hong Kong, China, 22–24 March 2011; pp. 355–366. [Google Scholar]
- Sridhar, S.; Manimaran, G. Data integrity attacks and their impacts on SCADA control system. In Proceedings of the IEEE PES General Meeting, Providence, RI, USA, 25–29 July 2010; pp. 1–6. [Google Scholar] [CrossRef]
- Teixeira, A.; Shames, I.; Sandberg, H.; Johansson, K.H. Revealing stealthy attacks in control systems. In Proceedings of the 2012 50th Annual Allerton Conference on Communication, Control, and Computing (Allerton), Monticello, IL, USA, 1–5 October 2012; pp. 1806–1813. [Google Scholar]
- Teixeira, A.; Shames, I.; Sandberg, H.; Johansson, K.H. A secure control framework for resource-limited adversaries. Automatica 2015, 51, 135–148. [Google Scholar] [CrossRef]
- Ding, D.; Han, Q.L.; Ge, X.; Wang, J. Secure state estimation and control of cyber-physical systems: A survey. IEEE Trans. Syst. Man Cybern. Syst. 2020, 51, 176–190. [Google Scholar] [CrossRef]
- Mahmoud, M.S.; Hamdan, M.M.; Baroudi, U.A. Modeling and control of cyber-physical systems subject to cyber attacks: A survey of recent advances and challenges. Neurocomputing 2019, 338, 101–115. [Google Scholar] [CrossRef]
- Giraldo, J.; Urbina, D.; Cardenas, A.; Valente, J.; Faisal, M.; Ruths, J.; Tippenhauer, N.O.; Sandberg, H.; Candell, R. A survey of physics-based attack detection in cyber-physical systems. ACM Comput. Surv. (CSUR) 2018, 51, 1–36. [Google Scholar] [CrossRef]
- Wood, A.D.; Stankovic, J.A. Denial of service in sensor networks. Computer 2002, 35, 54–62. [Google Scholar] [CrossRef]
- Mallikarjunan, K.N.; Muthupriya, K.; Shalinie, S.M. A survey of distributed denial of service attack. In Proceedings of the 2016 10th International Conference on Intelligent Systems and Control (ISCO), Coimbatore, India, 7–8 January 2016; pp. 1–6. [Google Scholar]
- Agarwal, M.; Purwar, S.; Biswas, S.; Nandi, S. Intrusion detection system for PS-Poll DoS attack in 802.11 networks using real time discrete event system. IEEE/CAA J. Autom. Sin. 2016, 4, 792–808. [Google Scholar] [CrossRef]
- Li, X.; Wang, Q.; Dai, H.N.; Wang, H. A novel friendly jamming scheme in industrial crowdsensing networks against eavesdropping attack. Sensors 2018, 18, 1938. [Google Scholar] [CrossRef]
- Malladi, S.; Alves-Foss, J.; Heckendorn, R.B. On Preventing Replay Attacks on Security Protocols; Technical Report; Idaho University Moscow Department of Computer Science: Moscow, Idaho, 2002. [Google Scholar]
- Schellenberger, C.; Zhang, P. Detection of covert attacks on cyber-physical systems by extending the system dynamics with an auxiliary system. In Proceedings of the 2017 IEEE 56th Annual Conference on Decision and Control (CDC), Melbourne, Australia, 12–15 December 2017; pp. 1374–1379. [Google Scholar] [CrossRef]
- Park, G.; Shim, H.; Lee, C.; Eun, Y.; Johansson, K.H. When adversary encounters uncertain cyber-physical systems: Robust zero-dynamics attack with disclosure resources. In Proceedings of the 2016 IEEE 55th Conference on Decision and Control (CDC), Las Vegas, NV, USA, 12–14 December 2016; pp. 5085–5090. [Google Scholar]
- Jeon, H.; Eun, Y. A Stealthy Sensor Attack for Uncertain Cyber-Physical Systems. IEEE Internet Things J. 2019, 6, 6345–6352. [Google Scholar] [CrossRef]
- Yuz, J.I.; Goodwin, G.C. Sampled-Data Models for Linear and Nonlinear Systems; Springer: London, UK, 2014. [Google Scholar]
- Hoehn, A.; Zhang, P. Detection of covert attacks and zero dynamics attacks in cyber-physical systems. In Proceedings of the 2016 American Control Conference (ACC), Boston, MA, USA, 6–8 July 2016; pp. 302–307. [Google Scholar]
- Naghnaeian, M.; Hirzallah, N.; Voulgaris, P.G. Dual rate control for security in cyber-physical systems. In Proceedings of the 2015 54th IEEE Conference on Decision and Control (CDC), Osaka, Japan, 15–18 December 2015; pp. 1415–1420. [Google Scholar] [CrossRef]
- Kim, J.; Back, J.; Park, G.; Lee, C.; Shim, H.; Voulgaris, P.G. Neutralizing zero dynamics attack on sampled-data systems via generalized holds. Automatica 2020, 113, 108778. [Google Scholar] [CrossRef]
- Kim, D.; Ryu, K.; Back, J. Security Enhancement of Sampled-Data Systems: Zero Assignment via Generalized Sampler. In Proceedings of the 21st IFAC World Congress 2020, Berlin, Germany, 12–17 July 2020. [Google Scholar]
- Naghnaeian, M.; Hirzallah, N.; Voulgaris, P.G. Security via multirate control in cyber–physical systems. Syst. Control. Lett. 2019, 124, 12–18. [Google Scholar] [CrossRef]
- Mao, Y.; Jafarnejadsani, H.; Zhao, P.; Akyol, E.; Hovakimyan, N. Novel stealthy attack and defense strategies for networked control systems. IEEE Trans. Autom. Control. 2020, 65, 3847–3862. [Google Scholar] [CrossRef]
- Gallo, A.J.; Turan, M.S.; Boem, F.; Parisini, T.; Ferrari-Trecate, G. A distributed cyber-attack detection scheme with application to DC microgrids. IEEE Trans. Autom. Control. 2020, 65, 3800–3815. [Google Scholar] [CrossRef]
- Singh, M.; Santoso, S. Dynamic Models for Wind Turbines and Wind Power Plants; Technical Report; National Renewable Energy Laboratory (NREL): Golden, CO, USA, 2011. [Google Scholar]
- Lubosny, Z.; Lubosny, Z. Wind Turbine Operation in Electric Power Systems: Advanced Modeling; Springer: Berlin/Heidelberg, Germany, 2003. [Google Scholar]
- Bianchi, F.D.; De Battista, H.; Mantz, R.J. Wind Turbine Control Systems: Principles, Modelling and Gain Scheduling Design; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2006. [Google Scholar]
- Georg, S.; Schulte, H.; Aschemann, H. Control-oriented modelling of wind turbines using a Takagi-Sugeno model structure. In Proceedings of the 2012 IEEE International Conference on Fuzzy Systems, Brisbane, Australia, 10–15 June 2012; pp. 1–8. [Google Scholar]
- Simani, S. Overview of modelling and advanced control strategies for wind turbine systems. Energies 2015, 8, 13395–13418. [Google Scholar] [CrossRef]
- Ansoategui, I.; Zulueta, E.; Fernandez-Gamiz, U.; Lopez-Guede, J.M. Mechatronic Modeling and Frequency Analysis of the Drive Train of a Horizontal Wind Turbine. Energies 2019, 12, 613. [Google Scholar] [CrossRef]
- Novak, P. On the Modelling and Partial-Load Control of Variable-Speed Wind Turbines; Technical Report; Chalmers University of Technology: Göteborg, Sweden, 19 August 1995. [Google Scholar]
- Kim, K.H.; Van, T.L.; Lee, D.C.; Song, S.H.; Kim, E.H. Maximum output power tracking control in variable-speed wind turbine systems considering rotor inertial power. IEEE Trans. Ind. Electron. 2012, 60, 3207–3217. [Google Scholar]
- Manyonge, A.W.; Ochieng, R.; Onyango, F.; Shichikha, J. Mathematical modelling of wind turbine in a wind energy conversion system: Power coefficient analysis. Appl. Math. Sci. 2012, 6, 4527–4536. [Google Scholar]
- Dai, J.; Hu, Y.; Liu, D.; Wei, J. Modelling and analysis of direct-driven permanent magnet synchronous generator wind turbine based on wind-rotor neural network model. Proc. Inst. Mech. Eng. Part A J. Power Energy 2012, 226, 62–72. [Google Scholar] [CrossRef]
- Available online: https://www.argolabe.es/100kw-windturbine.html (accessed on 28 January 2021).
- Maldonado-Correa, J.; Martín-Martínez, S.; Artigao, E.; Gómez-Lázaro, E. Using SCADA Data for Wind Turbine Condition Monitoring: A Systematic Literature Review. Energies 2020, 13, 3132. [Google Scholar] [CrossRef]
- Pandit, R.; Infield, D. Gaussian process operational curves for wind turbine condition monitoring. Energies 2018, 11, 1631. [Google Scholar] [CrossRef]
- Yang, W.; Court, R.; Jiang, J. Wind turbine condition monitoring by the approach of SCADA data analysis. Renew. Energy 2013, 53, 365–376. [Google Scholar] [CrossRef]
- Sun, P.; Li, J.; Wang, C.; Lei, X. A generalized model for wind turbine anomaly identification based on SCADA data. Appl. Energy 2016, 168, 550–567. [Google Scholar] [CrossRef]
- Zaher, A.; McArthur, S.; Infield, D.; Patel, Y. Online wind turbine fault detection through automated SCADA data analysis. Wind. Energy Int. J. Prog. Appl. Wind. Power Convers. Technol. 2009, 12, 574–593. [Google Scholar] [CrossRef]
- Qiu, Y.; Feng, Y.; Tavner, P.; Richardson, P.; Erdos, G.; Chen, B. Wind turbine SCADA alarm analysis for improving reliability. Wind Energy 2012, 15, 951–966. [Google Scholar]
- Tautz-Weinert, J.; Watson, S.J. Using SCADA data for wind turbine condition monitoring—A review. IET Renew. Power Gener. 2016, 11, 382–394. [Google Scholar] [CrossRef]
- Smith, R.S. Covert misappropriation of networked control systems: Presenting a feedback structure. IEEE Control. Syst. Mag. 2015, 35, 82–92. [Google Scholar]
- Mo, Y.; Weerakkody, S.; Sinopoli, B. Physical authentication of control systems: Designing watermarked control inputs to detect counterfeit sensor outputs. IEEE Control. Syst. Mag. 2015, 35, 93–109. [Google Scholar]
- Canaan, B.; Colicchio, B.; Ould Abdeslam, D. Microgrid Cyber-Security: Review and Challenges toward Resilience. Appl. Sci. 2020, 10, 5649. [Google Scholar] [CrossRef]
- Pasqualetti, F.; Dörfler, F.; Bullo, F. Attack detection and identification in cyber-physical systems. IEEE Trans. Autom. Control. 2013, 58, 2715–2729. [Google Scholar] [CrossRef]
- Teixeira, A.; Dán, G.; Sandberg, H.; Johansson, K.H. A cyber security study of a SCADA energy management system: Stealthy deception attacks on the state estimator. IFAC Proc. Vol. 2011, 44, 11271–11277. [Google Scholar] [CrossRef]
- Park, G.; Lee, C.; Shim, H.; Eun, Y.; Johansson, K.H. Stealthy adversaries against uncertain cyber-physical systems: Threat of robust zero-dynamics attack. IEEE Trans. Autom. Control. 2019, 64, 4907–4919. [Google Scholar] [CrossRef]
- Teixeira, A.; Pérez, D.; Sandberg, H.; Johansson, K.H. Attack models and scenarios for networked control systems. In Proceedings of the 1st International Conference on High Confidence Networked Systems, Beijing, China, 17–18 April 2012; pp. 55–64. [Google Scholar]
- Khalil, H.K. Nonlinear Systems, 3rd ed.; Prentice-Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Chen, C.T. Linear System Theory and Design, 4th ed.; Oxford University Press: New York, NY, USA, 2013. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| R | |||||
|---|---|---|---|---|---|
| 30,375 kg | 151 kg | 0.31 N·m/rad | 11.25 m | 6 | 47.24% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, D.; Ryu, K.; Back, J. Zero-Dynamics Attack on Wind Turbines and Countermeasures Using Generalized Hold and Generalized Sampler. Appl. Sci. 2021, 11, 1257. https://doi.org/10.3390/app11031257
Kim D, Ryu K, Back J. Zero-Dynamics Attack on Wind Turbines and Countermeasures Using Generalized Hold and Generalized Sampler. Applied Sciences. 2021; 11(3):1257. https://doi.org/10.3390/app11031257
Chicago/Turabian StyleKim, Daehan, Kunhee Ryu, and Juhoon Back. 2021. "Zero-Dynamics Attack on Wind Turbines and Countermeasures Using Generalized Hold and Generalized Sampler" Applied Sciences 11, no. 3: 1257. https://doi.org/10.3390/app11031257
APA StyleKim, D., Ryu, K., & Back, J. (2021). Zero-Dynamics Attack on Wind Turbines and Countermeasures Using Generalized Hold and Generalized Sampler. Applied Sciences, 11(3), 1257. https://doi.org/10.3390/app11031257