1. Introduction
Metal cutting is one of the essential processes throughout engineering designs and manufacturing industries. In order to reduce costs and increase productivity, it is necessary to improve understanding of the metal cutting problem. As there is a wide range of design variables (e.g., tool wear, workpiece temperature, process forces, chip shape, or surface quality) and diverse physical phenomena; nonetheless, the reliability of empirical and analytical models for metal cutting is limited. In this view, computer-based simulations using numerical methods appear as an invaluable alternative to study metal cutting problems with deeper insights.
In addition to the well-known Finite Element Method (FEM), the family of particle-based methods is another numerical approach frequently used for cutting simulations. Unlike FEM, however, these methods do not require re-meshing as they are mesh-free. This interesting feature of particle methods makes them a suitable choice for metal cutting applications. In particular, the Smoothed Particle Hydrodynamics (SPH) method, introduced independently by Gingold et al. [
1] and Lucy [
2] in 1977, sees a broader spectrum of applications in this context. SPH is known as a well-established numerical tool for modeling fluid dynamics. Examples include the application in impact [
3] and shockwave [
4] simulations, complex free-surface problems [
5], and thermal simulation of multiphase flows by [
6,
7]. The utilization of SPH in more industrially-oriented fields of application can also be found in the literature. Examples in laser-based manufacturing problems are the modeling of material removal in [
8,
9] and pulsed-laser ablation of aluminum in [
10].
Between 2007 and 2015, numerous researchers applied SPH to metal cutting and the chip formation, including the high-speed cutting [
11,
12] and 3D single-grain [
13] models using commercial software packages, as well as the developments in [
14,
15] using an in-house code. These papers do not consider the heat transfer from the workpiece to the tool, while the experimental evidence has shown that a significant proportion of heat in metal machining operations transfers from the chipping zone to the cutting tool [
16]. More recently, the concept of parallel computing on Graphics Processing Units (GPU) has been introduced to both 2D [
17] and 3D [
18] SPH cutting simulations to boost the computational performance. Afrasiabi et al. [
19] employed this GPU-accelerated approach for inverse parameter identification and proposed a temperature-dependent coefficient of friction in SPH cutting models. Furthermore, a tailor-made framework for the multi-resolution SPH simulation of orthogonal cutting tests was published by [
20]. It is worth mentioning that the computer codes utilized by these recent works are open source.
Although previous studies have demonstrated some excellent results in the capability of SPH to simulate metal cutting processes, none of them accounts for heat loss boundary conditions in their thermal model. More specifically, the issue with ignoring the heat transfer from the workpiece to the tool in SPH models (e.g., in [
13,
20]) was addressed by some recent works in [
17,
19]. However, the thermal modeling approach in these papers also suffers from two shortcomings: (1) Utilizing an inconsistent Laplacian operator that deteriorates the solution accuracy near the boundaries. (2) Neglecting the convective and radiative heat loss from the system. Consequently, we intend to develop a comprehensive thermal model for SPH cutting simulations that resolve these issues and account for all these effects.
In this work, a numerical simulation framework is developed that can increase the reliability of available mesh-free cutting models in their thermal modeling approach. As the first task, boundary particles are identified by a robust surface detection algorithm [
5] borrowed from the CFD community. The present thermal model contains (1) heat generation due to the plastic and frictional work, (2) heat transfer from the workpiece to the tool, (3) heat conduction in the whole system, and (4) both Dirichlet and von Neumann boundary conditions. To address the inconsistency issue of SPH formulations, an adaptation of Fatehi’s scheme [
21] (FMFS) is additionally used, which introduces an approximation of the Laplace operator of second-order consistency. This method is implemented here for the first time in solid mechanics problems with large deformations. For an application of FMFS in 3D heat conduction problems with no deformations, see in [
22]. Please note that the results presented here are produced by the open-source codes for SPH metal cutting, which are available online and given in the “
Supplementary Materials” section of this article.
2. Governing Equations
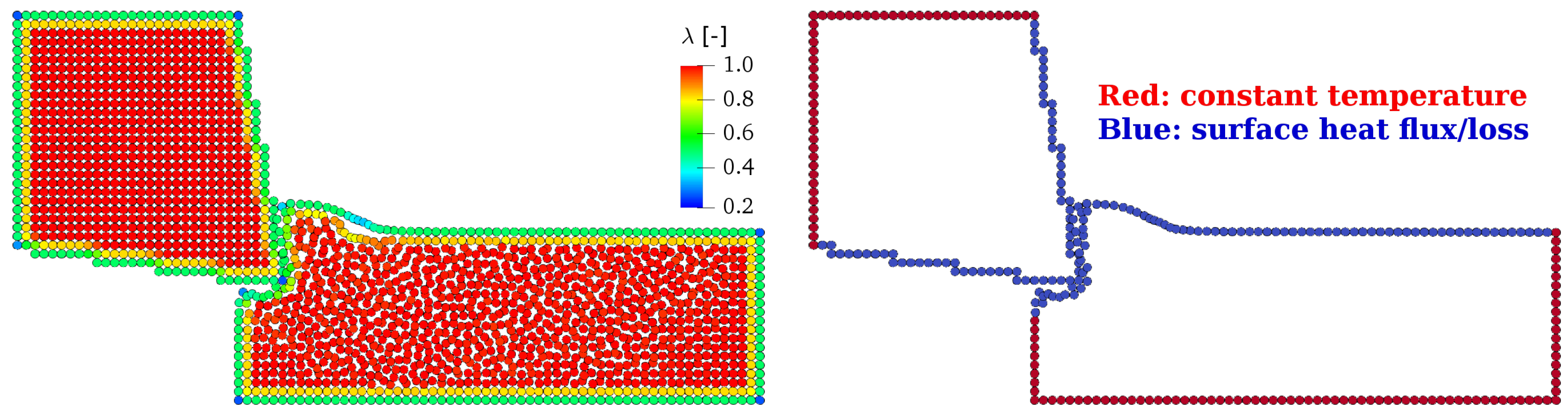
Before presenting the numerical framework for modeling of a cutting process, we provide an overview of the underlying physics in this section. The drawings in
Figure 1 show a graphical illustration of the key thermal aspects of metal cutting. In these figures, the main heat sources associated with each deformation zone are shown, as well as a representation of the thermal boundary conditions.
The continuum mechanical equations in a Lagrangian formalism are expressed by the field equations:
where
is the density,
the position vector,
the velocity,
the Cauchy stress tensor, and
the volumetric body forces. It is worth mentioning that all numerical simulations in this work are based on single-resolution SPH formulations; thus, a uniform constant mass is allocated to each computational node and the momentum equation (i.e., Equation (2)) does not require the utilization of mass scaling. An elaboration of this subject, as well as further details on the numerical stabilization procedure, can be found in [
19,
20]. This mechanical system is coupled with thermal effects by solving the heat conduction equation:
in which
k is the heat conductivity assuming an isotropic heat conduction,
the specific isobaric heat capacity, including the source terms
and
due to the conversion of the plastic and frictional work. According to the works in [
17,
23], these heat sources are computed from
if
and
are dimensionless parameters specifying the fraction of plastic and frictional work converted into heat (see in [
23,
24]). According to the illustration in
Figure 1, the boundary conditions of Equation (
4) are given by
with
denoting the heat convection coefficient,
and
the surface and background temperatures, respectively;
the emissivity factor; and
the Stefan–Boltzmann constant.
For material modeling, the Johnson–Cook (JC) flow stress according to [
25] is used to define the plastic response of the workpiece material. This model calculates the flow stress of the material,
, and incorporates three effects: strain hardening, strain rate hardening, and thermal softening. The JC flow stress is computed from
where
is the equivalent plastic strain and
and
are the reference temperature and melting point, respectively. In
Section 5, the values of five JC parameters (
, and
n) will be provided for the titanium alloy under consideration.
For friction modeling, Coulomb’s law with a constant coefficient of
is considered as a typical choice in LS-DYNA [
13] and other SPH cutting models like [
17], unless otherwise mentioned. As the magnitude of
has a significant impact on the force prediction of numerical cutting models (see in [
19,
26] for more details), a sensitivity analysis will be presented to provide further insights into the influence of the friction coefficient on simulation results.
3. SPH Formulation
The partial differential equations (PDEs) outlined in Equations (
1), (2), and (
4) need to be discretized in space and time. The spatial discretization is performed by applying an stabilized SPH scheme. Liu et al. [
27] provide a good overview of the SPH formulations and its derivation details. The time discretization is then carried out using an explicit second-order leapfrog stepping. Monaghan [
28] provides the implementation procedure of this time integration scheme for SPH models.
Using a modified SPH approach expressed in [
29,
30], the mass, momentum, and heat equations for particle
i can be written in the following discrete forms:
where
is the integration volume of particle
j and
is a kernel function with the smoothing length
h, chosen to be the cubic B-spline function [
31] in this work. Furthermore,
and
are the artificial viscosity term [
32] and the artificial stress tensor [
33] with the parameters taken similarly as in [
17,
19]. For the heat equation expressed in Equation (12), the method suggested by Brookshaw [
30] is considered to discretize the Laplacian operator, where
is a unit vector in the inter-particle direction. After computing these equations for each particle, the particles position
is updated with a smoothed velocity instead of the actual velocity. This smoothing scheme was introduced by Monaghan [
34] and is called the X-SPH correction. The same X-SPH parameter as [
17,
19] is used for the numerical simulations of this work.
5. Results & Discussion
Before applying the higher-order SPH method (i.e., FMFS) to a metal cutting problem, we showcase a simple mathematical function to validate the implementation of Equation (
13) and examine its improvement versus the Brookshaw SPH expressed in Equation (12).
5.1. Preliminary Study
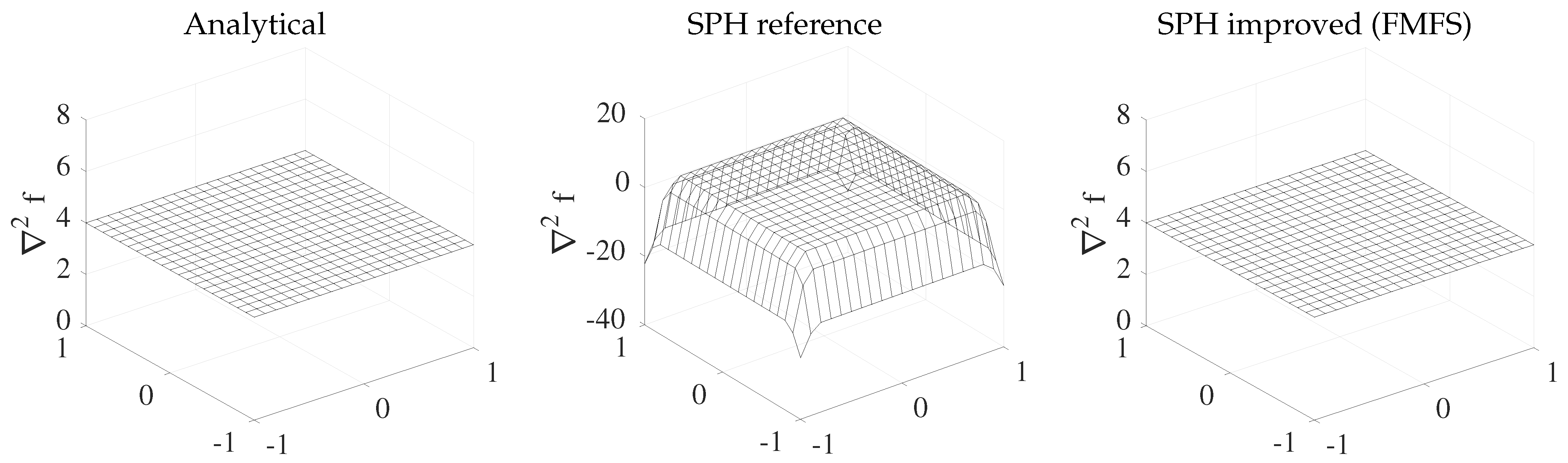
In this example, the Laplacian of is computed in a domain of discretized by uniformly spaced particles, for which the analytical answer is given by . This choice was made to verify the second-order consistency of the FMFS approximation. As mentioned before, the cubic B-spline kernel with a smoothing length of is used.
Figure 3 demonstrates the surface plots of numerical solutions, where FMFS recovers second-order consistency by producing exact results throughout the domain. In the case of using the reference SPH method, as shown in the middle plot of
Figure 3, severe inconsistencies resulting from the boundary deficiency of SPH exist outside the range of
. The computations show that the Laplacian result using the reference SPH model is approximately +4.027 within
. Outside this range, the approximation error of
increases drastically and reaches its maximum value at four corners. The approximate value of Laplacian at these points is −22.12, corresponding to a relative error of 453%. As discussed already, the FMFS method employed by the proposed thermal model resolves this issue by incorporating higher-order terms and kernel renormalization, giving exact results with no error.
This preliminary investigation indicates that boundary effects can deteriorate the accuracy of the SPH Laplacian operator. Indeed, this situation occurs in metal cutting problems, where the thermal boundary conditions are associated with high surface temperatures, especially in the chip formation zone. By applying FMFS in the proposed thermal model, the heat equation in SPH metal cutting simulations is solved more accurately at the price of a higher computational cost.
5.2. Application: Orthogonal Metal Cutting
After validating the implementation of the higher-order Laplacian model, a 2D simulation of the orthogonal cutting of a Ti6Al4V titanium alloy is carried out using the process parameters and problem dimension listed in
Table 1. For this material, the JC parameters
MPa,
MPa,
,
, and
are chosen, according to the works in [
17,
19,
25] for very similar applications.
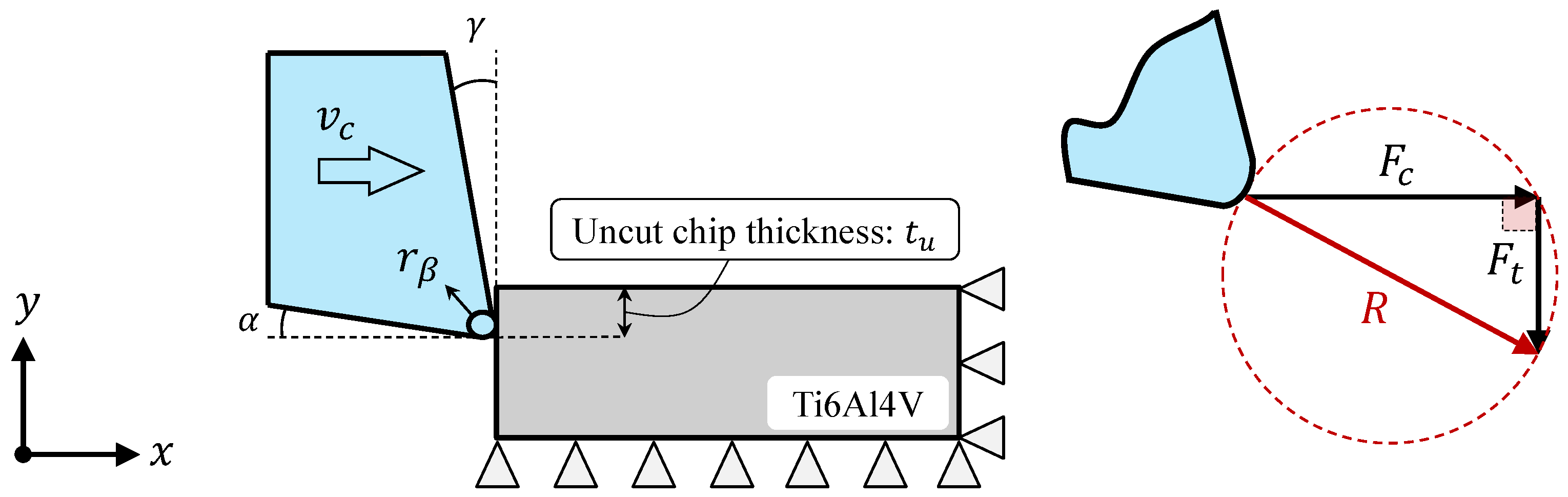
Figure 4 shows the geometry and boundary conditions for this problem, where a Dirichlet temperature boundary condition of
K is imposed on the fixed layers (see
Figure 2). The SPH simulation runs until 2/3 of the workpiece length is cut with a speed of
m/min. This choice of the cut distance is made to ensure that the solution is not affected by the fixed boundary condition (see the right side of the Ti6Al4V workpiece in
Figure 4). Moreover, it leads to a cut distance of 2 mm, which is much longer than what is needed to reach the steady-state forces at this high cutting speed [
37].
A total of 41 particles (with regular spacing) along are used to discretize the workpiece. Clearly, using SPH particles of different sizes leads to computationally more efficient discretizations. Due to the ease of computer implementation and for more simplicity, however, the present work considers a uniform spacing of SPH particles in all simulations. For implementing the thermal model throughout the system, it is necessary to discretize the cutting tool as well. In this paper, the size of SPH particles in the tool is set to be equal to the size of SPH particles in the workpiece. It is important to note that the heat equation on the tool side can also be solved by the finite-difference or finite-element methods. While these mesh-based approaches are generally more efficient than SPH in thermal modeling, they are not implemented here as the utilization of a hybrid particle-element technique is beyond the scope of this paper.
5.2.1. Force Prediction and Chip Shape
Among the provided experimental dataset, the highest cutting speed of
m/min was chosen for the SPH models of this paper to attain the shortest simulation time. The elapsed time per 2 mm cut distance is in the range of 29 h for this cutting speed, with a single core of Intel
® i5-4690 at 3.50 GHz. Furthermore, the orthogonal cutting experiment was conducted by setting a rake angle of
° in order to obtain a state, where the thrust force (
in
Figure 4) is mainly caused by the friction between the rake face and the sliding chip.
For the experimentation, we conducted turning operations as orthogonal cutting tests on a Ti6Al4V cylinder with a diameter of about 70 mm and a wall thickness of 2 mm. The insert in its holder was held on the tool turret of the CNC turning machine. Both cutting and feed forces ( and ) were measured with a 3D Kistler piezoelectric force sensor.
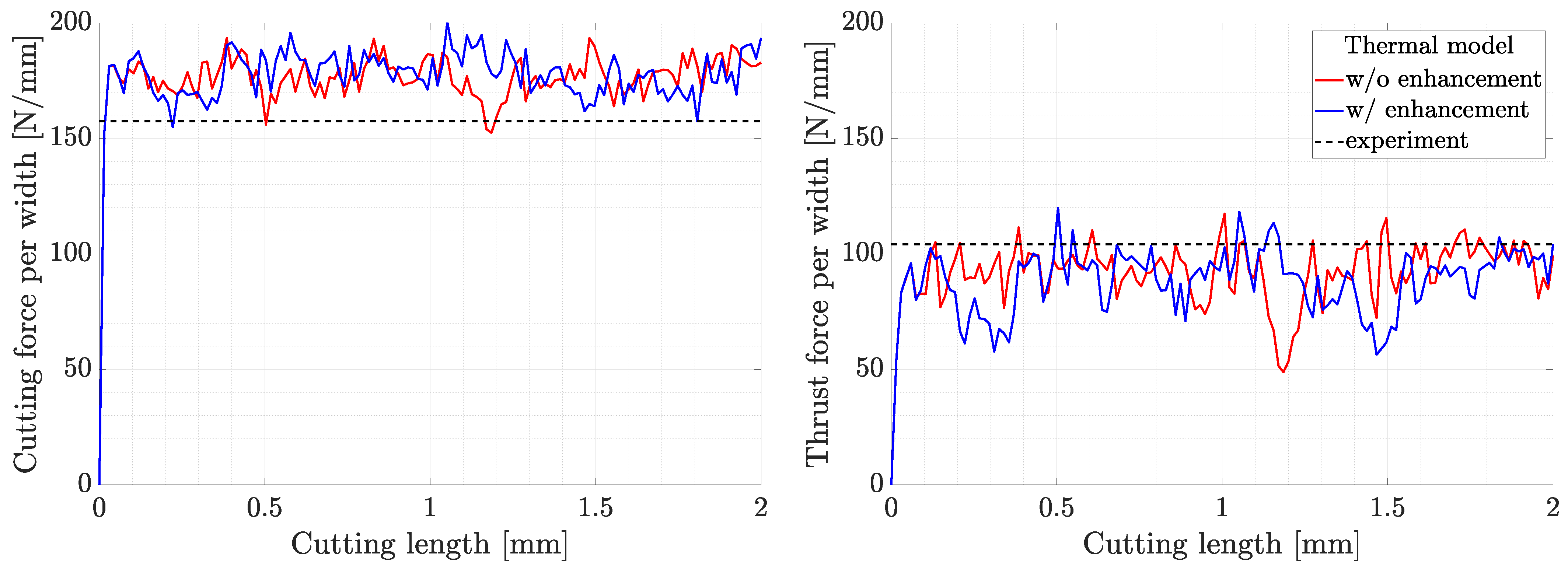
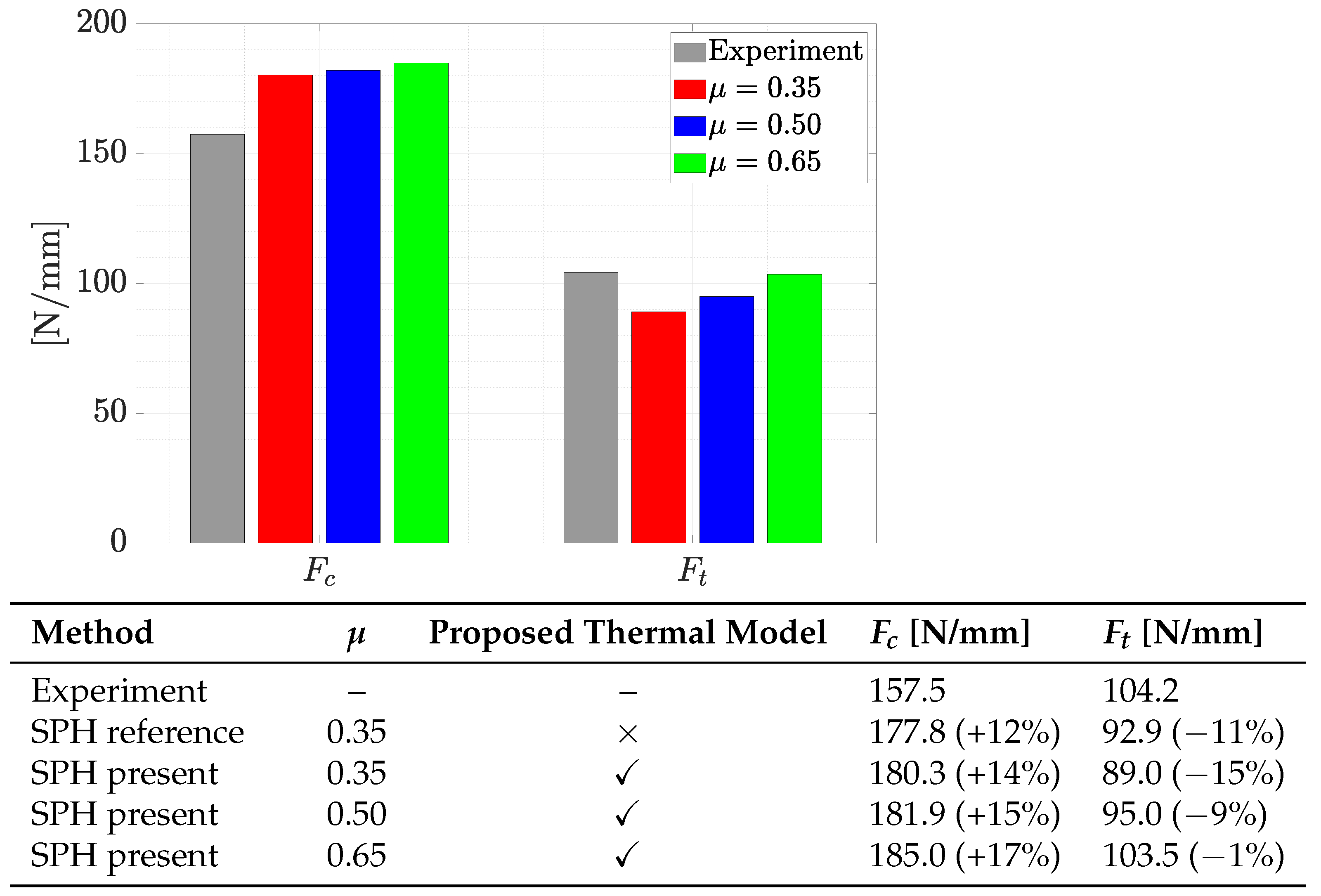
The numerical simulation is first validated by comparing the predicted forces with the experimental measurements.
Figure 5 plots the evolution of these forces during 2 mm of this cutting process. An average of the predicted forces is calculated at the stationary zone, after almost 10% of the simulation time is elapsed. These average forces are listed in
Figure 6, showing that both
and
computed from the simulation compare very well with the experimental data. The percent errors given in parentheses in this table shows an average of approximately 14% overprediction for
and 9% underprediction for
.
According to the thrust force plot in
Figure 5, the overall maximum discrepancy between the experimental and numerical results produces an error of 53% underprediction for SPH with the reference model (see the red line at about 1.2 mm cutting length). When using the proposed model, this value is reduced to 45% and occurs slightly before 1.5 mm of the cutting length. At first glance, this discrepancy may not be within an acceptable range for some applications such as precision machining. Nevertheless, the community of SPH cutting simulations typically consider an average error of force prediction to verify their numerical results and not the maximum value, see, e.g., in [
17,
20,
39].
One way to rectify this situation is increasing the spatial resolution (i.e., decreasing the discretization size), as shown in [
19]. High-resolution SPH simulations of metal cutting are (arguably) only possible with high-performance computing and parallel processing. This topic is outside the scope of this paper, thus not taken into consideration here. Another way to mitigate this issue in predicting the thrust force is to enhance the contact and friction model. This is because the thrust force is mainly affected by the frictional behavior at the rake face (particularly if
°). The following sensitivity analysis will provide some deeper insight into this subject matter.
Previous studies such as those in [
19,
40] have already shown that the force prediction in metal cutting simulations is mainly affected by the choice of the flow stress parameters (e.g., the five unknown constants in
in Equation (
9)) and friction coefficients. This statement justifies the marginal difference between the SPH reference and the SPH present data provided in
Figure 6, where all material and friction parameters are the same, and only the thermal modeling approach is different (Please note that the signed percent errors displayed between parentheses in the table of
Figure 6 are obtained by comparing the simulated forces against the experimental values given on the first row). It also clarifies the reason why increasing
from 0.35 to 0.65 decreases the average error of thrust force from 15% to only 1%.
Given the measured forces in
Figure 6, the friction coefficient corresponding to the experimental
and
is equal to 0.66, whereas
was initially taken for the SPH simulation. Therefore, two additional simulations are carried out using
and
to gain further insights.
Figure 6 shows a quantitative comparison of these simulated forces in a bar chart, where the present thermal model is used. As expected, the effect of
on
is higher than
, resulting in the best prediction of
when
. It is because the friction model in this cutting geometry with a rake angle of 0 degrees has the most significant influence on the magnitude of
. Although not very significant, the choice of
was found to have impact also on the simulated chip shapes.
5.2.2. Temperature Distribution
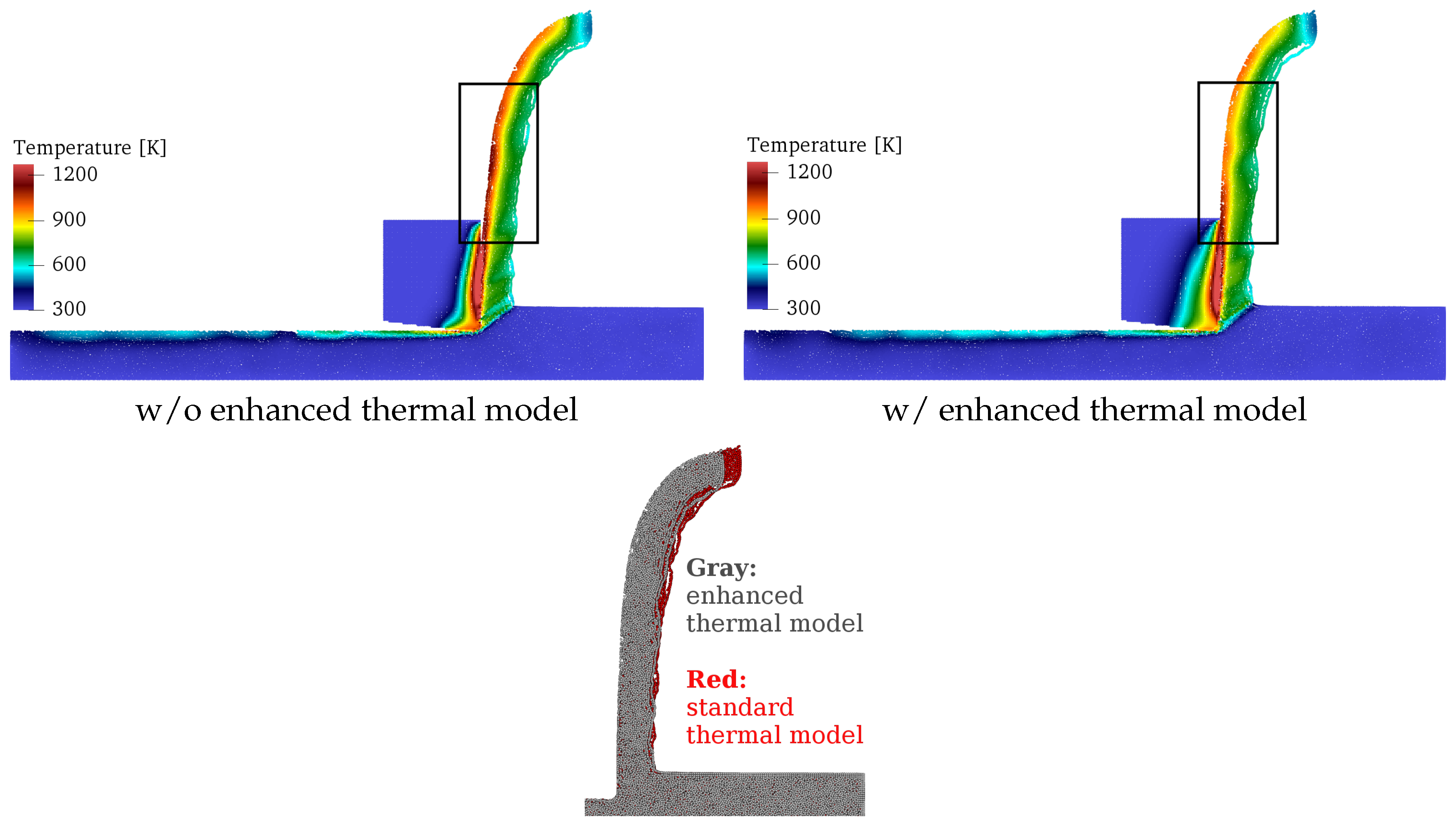
The temperature distribution after
mm is displayed in
Figure 7 to provide some qualitative insights into the thermal aspects of this metal cutting simulation. The left image of this figure is produced by running a simulation with the standard thermal model expressed in Equation (12), where no heat loss boundary condition is included. The middle image in
Figure 7 is the result of a simulation including the proposed enhancements outlined in Equations (8) and (
13). The chip temperature computed by the enhanced model is slightly lower than the standard model. This is because the open boundaries in the standard thermal model are perfectly isolated and the surface heat loss is ignored. More fundamentally, the essence of this marginal difference between the temperature distributions in
Figure 7 can be associated with the constitutive modeling parameters and thermo-physical aspects of Ti6Al4V. To better show the impact of the enhanced thermal model on simulation results, therefore, cutting experiments at lower speeds and/or materials with higher thermal conductivity (e.g., AISI 1045) need to be considered. It is conjectured that running high-resolution SPH simulation of cutting chip formation can also help improve this issue.
Next, the chip shapes of these two models are superimposed with two solid colors for a visual comparison. Ignoring the heat loss boundary condition by the standard model (i.e., the red particles in
Figure 7) is the source of slightly more chip curling compared to the present enhanced model (i.e., the gray particles in
Figure 7). Clearly, the chip becomes hotter when heat is not lost through its open surfaces.
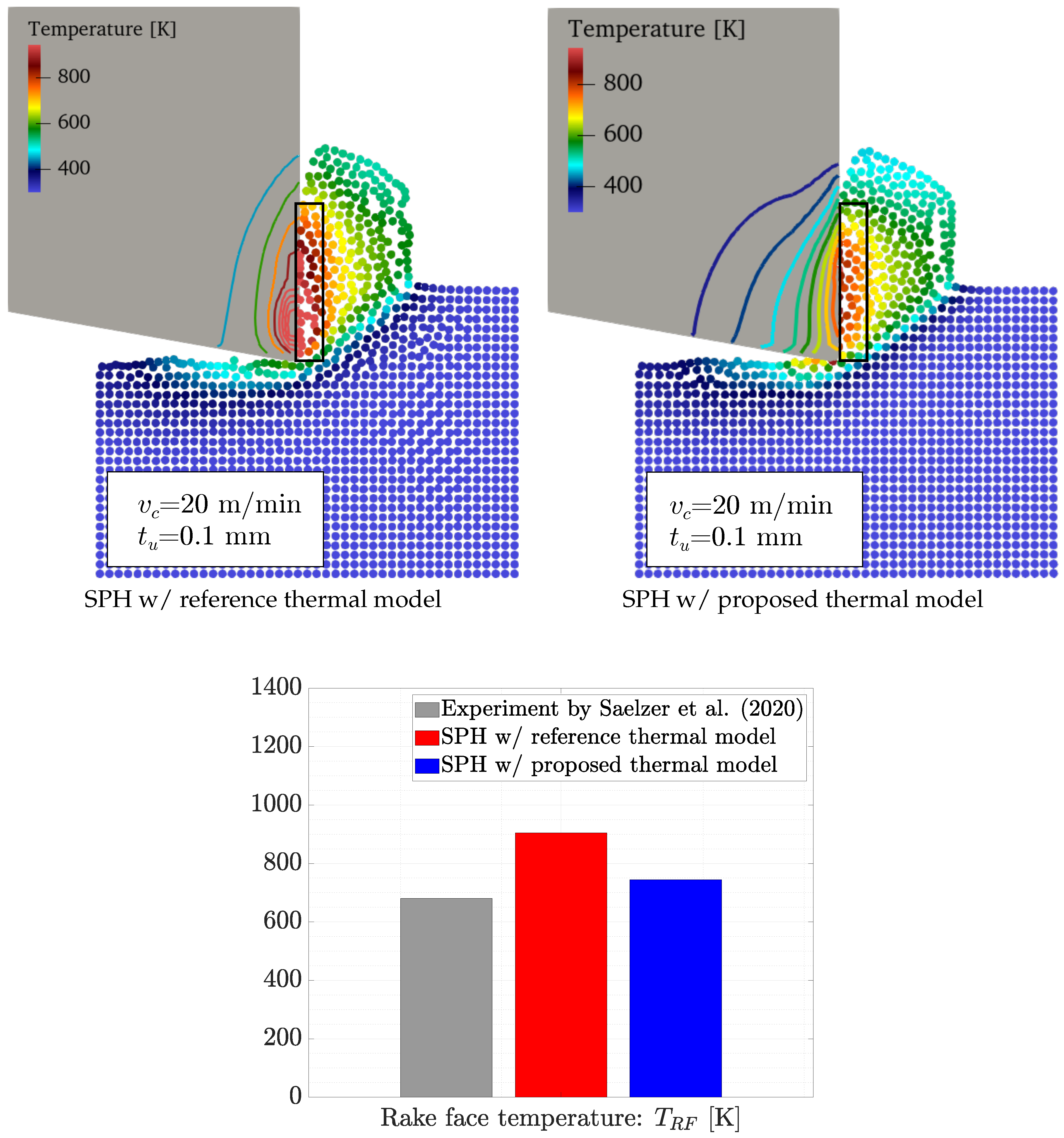
The thermal model in metal cutting has an indirect effect on force prediction, while its impact on the temperature field is direct, and perhaps more significant. Therefore, it is beneficial to demonstrate the improvements gained by the proposed model via a quantitative comparison. For this purpose, an orthogonal cutting experiment conducted by Saelzer et al. [
41] is taken into account, where temperature measurements are available. The case study pertains to machining a Ti6Al4V workpiece at a cutting speed of
m/min, an uncut chip thickness of
mm, and a rake angle of
°. The rake face temperature (
) in this setting is about 680 K. Please note that
m/min is the lowest speed available in [
41], deliberately chosen here to provide more time for thermal conduction in the chip formation zone. As the runtime associated with this relatively low cutting speed is almost 16× longer than the previous test at
m/min, these SPH simulations are carried out at a lower resolution and terminated after a cut distance of
mm.
Shown in
Figure 8 are the SPH results employing different thermal models, as well as a comparison of the rake face temperatures. The bar chart in this figure compares the predicted temperatures with the experimentally measured data from [
41], which can, in turn, verify the correctness of the proposed thermal model. The red and blue bars are the arithmetic mean temperature of particles located inside the indicated black frames at the rake face, corresponding to 905 K and 744 K, respectively. Using the enhanced thermal model decreases the overprediction error of
from 33% to 9% and leads to a more accurate simulation. This improvement is gained by the more realistic thermal boundary conditions in the proposed model and the utilization of a higher-order Laplacian operator.
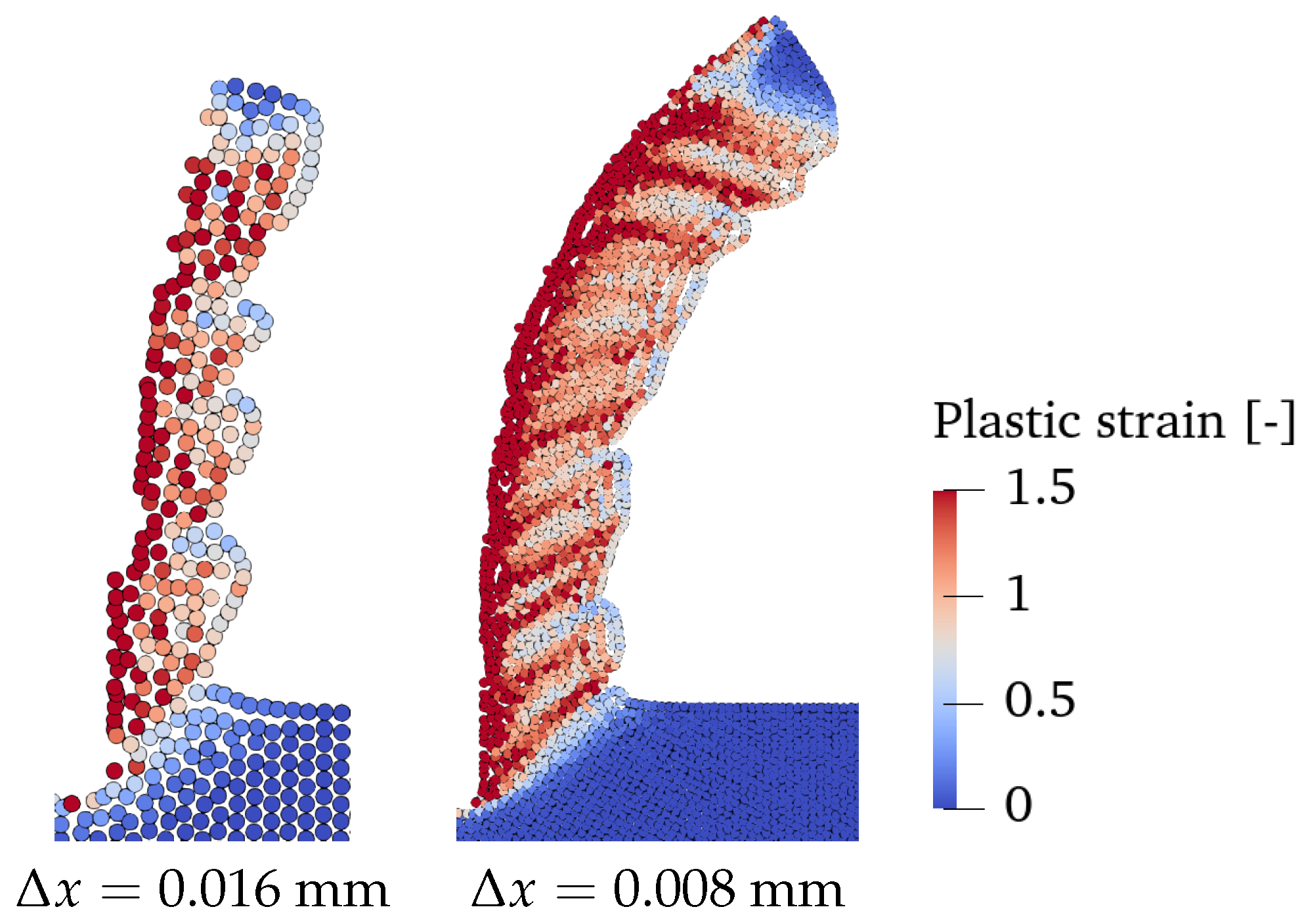
5.2.3. Effect of SPH Particles Size
Before closing this section, the effect of resolution (i.e., the size of SPH particles) on the accuracy of the model is briefly discussed. For this purpose, a cutting geometry with
and the parameters listed in
Table 1 is considered.
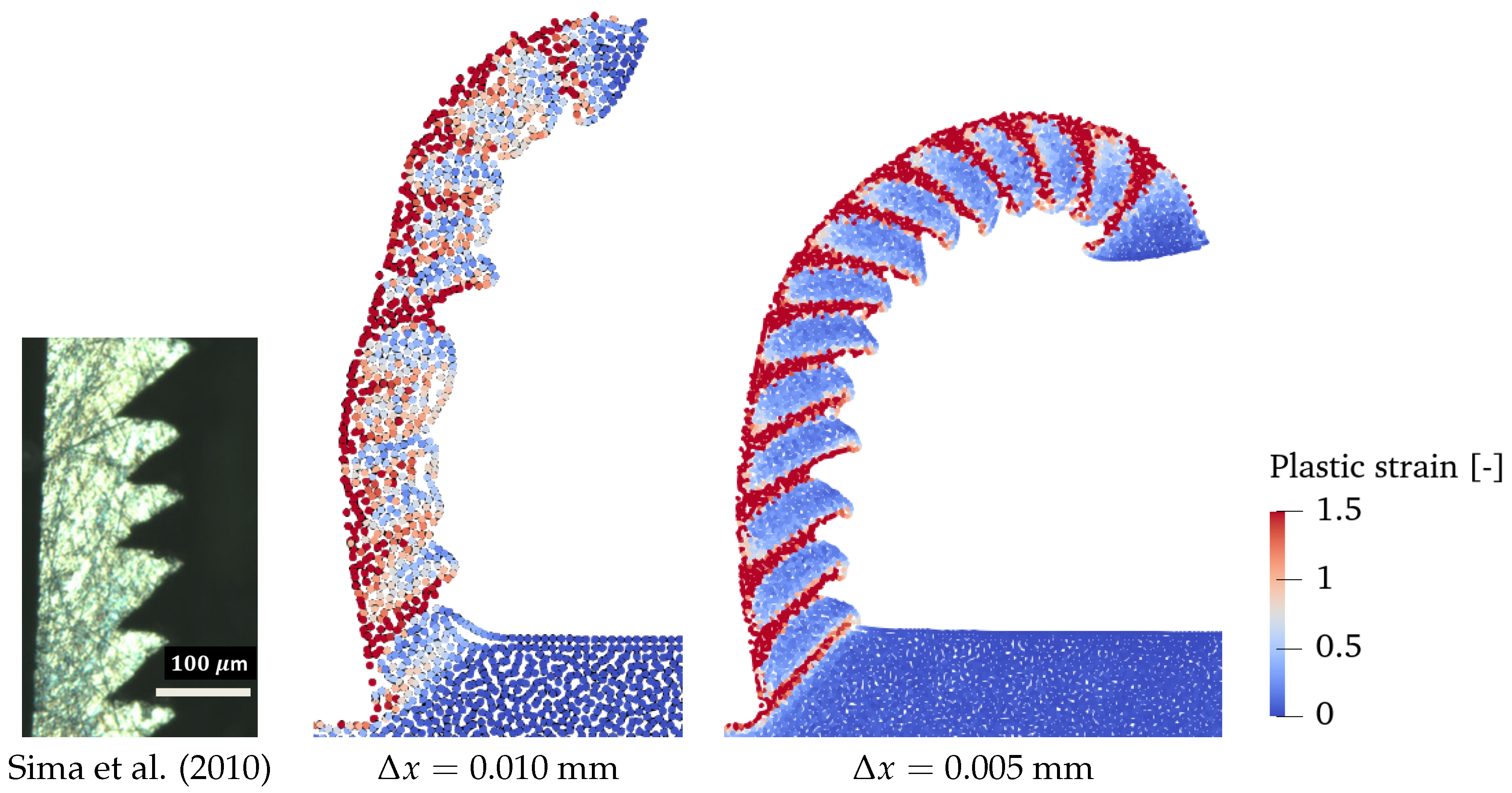
Figure 9 shows the equivalent plastic strain distribution for two similar simulations in different resolutions. As seen in this comparison, the high-resolution model (i.e.,
mm) performs better in capturing the shear bands and chip curling. It can be concluded that reducing the size of SPH particles increases the accuracy of the predicted chip shape.
Previous studies have also investigated the influence of discretization size on SPH metal cutting results. For instance, the authors of [
20] focused on this subject and presented a new framework for SPH metal cutting models with variable particle size. They showed that the size of SPH particles has a significant impact on the predicted chip shapes.
Figure 10 demonstrates this finding, where the chip shape produced by smaller size SPH particles (i.e., the high-resolution case with
mm) is much closer to the serrated chip shape observed in the experiment. This, in turn, serves as a qualitative measure of convergence of the method for chip prediction.
6. Conclusions
This paper presented a stabilized SPH framework for numerical simulation of orthogonal metal cutting with an enhanced thermal model. The numerical analysis consists of both thermal and mechanical effects by solving the heat equation in the whole system and considering the elasto-plastic behavior of the material. We found the agreement between the forces measured in the experiment and those predicted by SPH satisfactory, where the average error of force prediction (in both and ) was smaller than 14% by comparing the numerical and experimental results. It was also shown that the temperature values obtained from the SPH simulation agree with the experimental measurement, leading to more accurate results with the proposed thermal model. The main contributions of this work to the SPH cutting models are summarized in the following.
- -
To account for the heat loss boundary condition in SPH cutting models, a new approach was proposed and subsequently applied to an orthogonal cutting problem. This approach incorporates an efficient surface detection algorithm, which was initially proposed for fluid flow applications [
5]. An improved thermal model representing more realistic boundary conditions was presented as a result of this development. In addition to the constant temperature at fixed boundaries, heat loss in the forms of thermal convection and radiation was included.
- -
To ensure a second-order Laplacian operator in SPH, a corrected formulation (see the FMFS scheme in Equation (
13)) was implemented for the first time in a metal cutting problem. This higher-order method allows us to solve the heat equation more accurately, especially in the presence of free surfaces.
Future work opportunities can go in different directions. First, it would be necessary to conduct more experiments for temperature measurements in high-speed cutting. Another enhancement to this study, and perhaps applicable to much of the simulation literature, is determining all material and friction data by a unified numerical-experimental investigation (instead of assuming them from other work). Furthermore, the computational performance of the code needs to be enhanced by high-performance and parallel computing. This consideration is essential for high-resolution simulations of chipping and the 3D implementation of the present code.















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}