
The Influence of the Abduction Joints of Four Fingers to Grasp: Experimental and Simulated Verification


Abstract
:1. Introduction
2. Materials and Methods
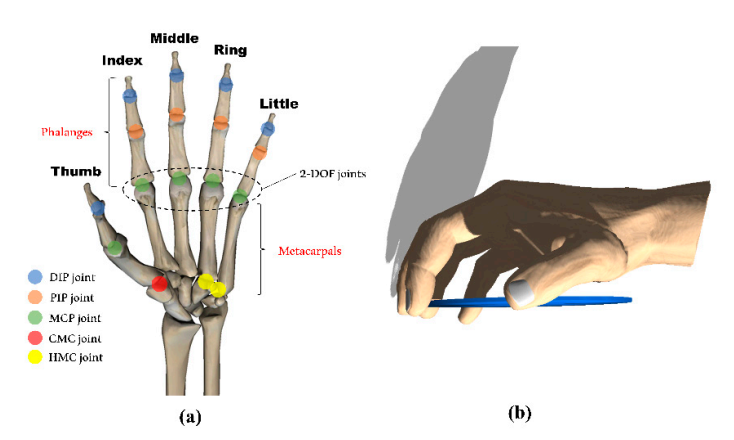
2.1. Constrained Conditions of ab/d Joints
- (1)
- All four fingers have ab/d DOF, namely, the hand is free (Free);
- (2)
- Only the ring finger and little finger have ab/d DOF, namely, the ab/d DOF of the index finger and middle finger are locked (IM-L);
- (3)
- Only the index finger has ab/d DOF, namely, the ab/d DOF of the middle finger, ring finger and little finger are locked (MRL-L);
- (4)
- None of the four fingers had ab/d DOF, namely, the index finger, middle finger, ring finger and little finger were locked (IMRL-L).
2.2. Design of the Joint Restrictor
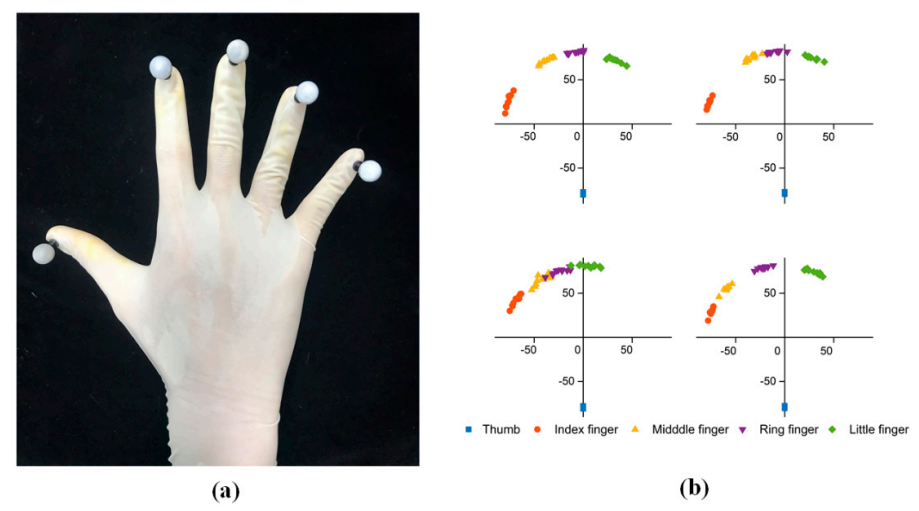
2.3. Grasping with the Human Hand
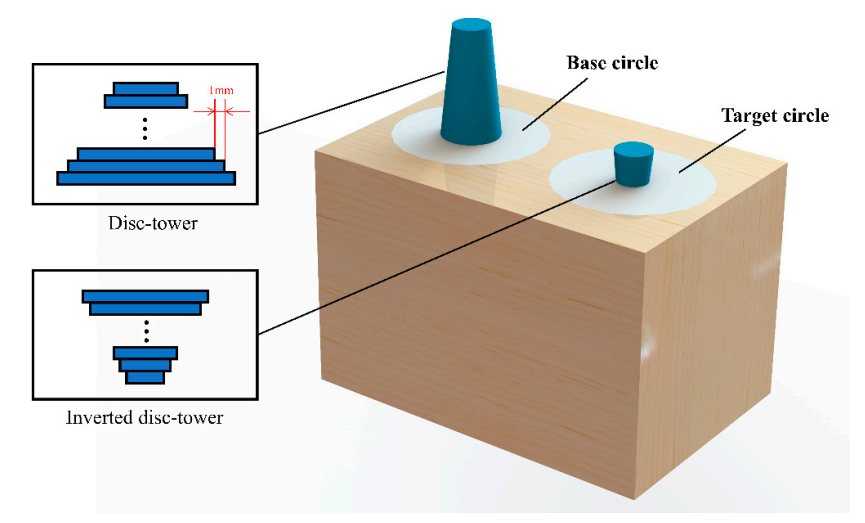
2.3.1. Grasp Size by Disk-Tower Test
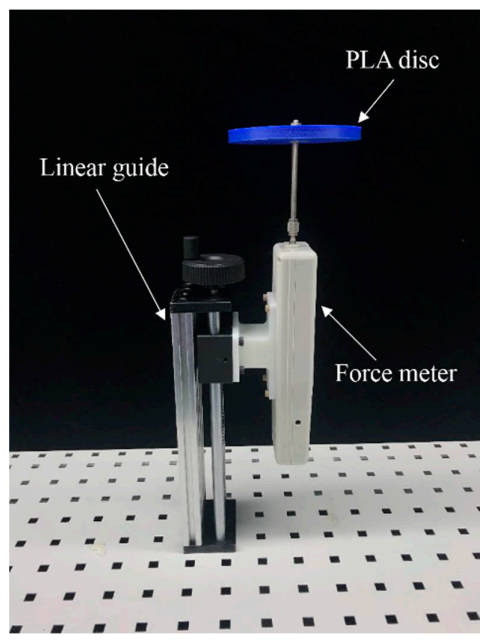
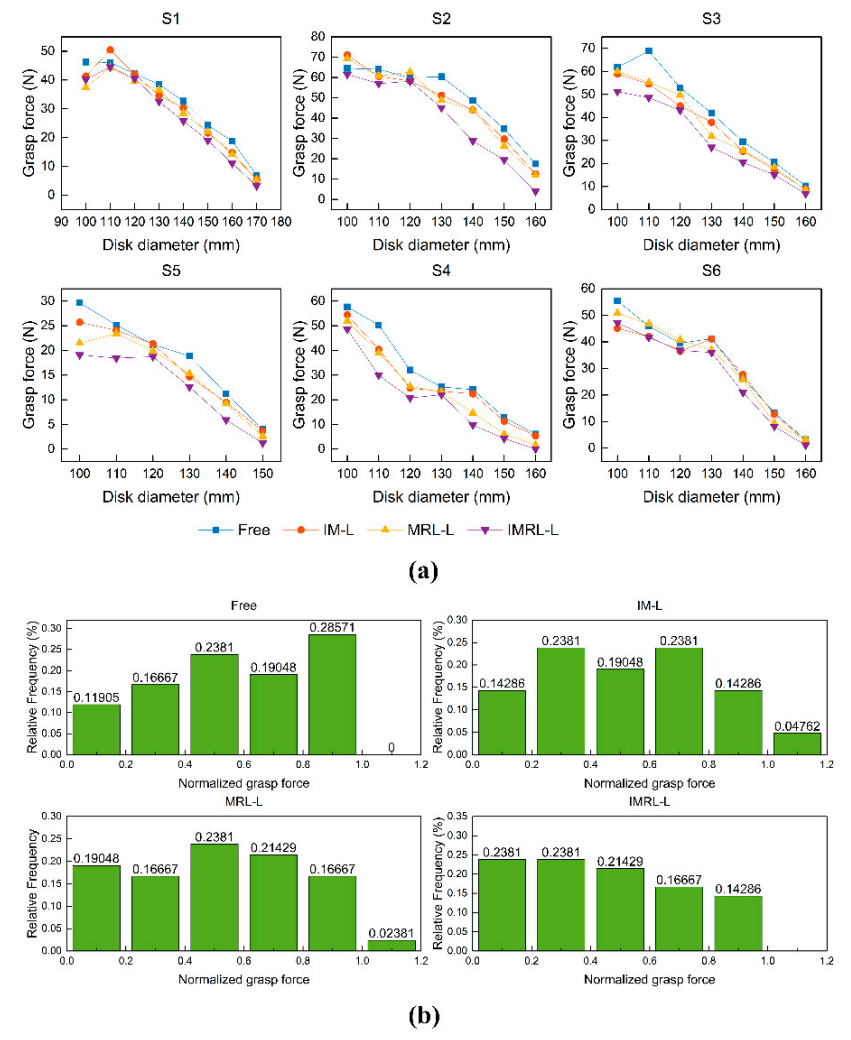
2.3.2. Grasp Force
2.4. Grasping with a Simulator
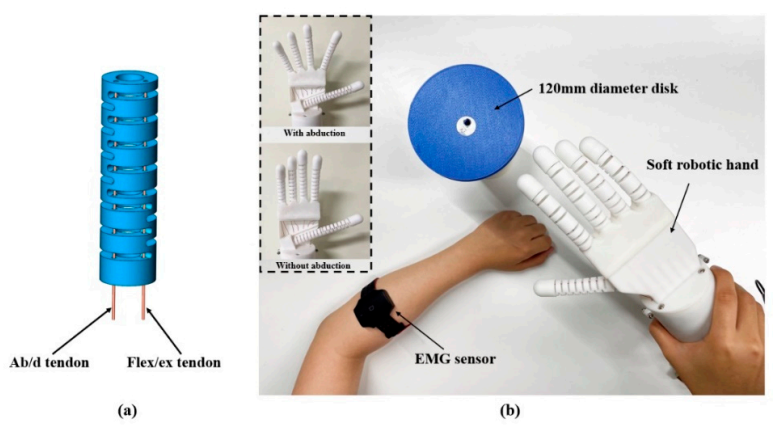
2.5. Grasping with a Soft Robotic Hand
3. Results
3.1. Grasping with the Human Hand
3.1.1. Grasp Size
3.1.2. Grasp Force
3.2. Grasping with a Simulator
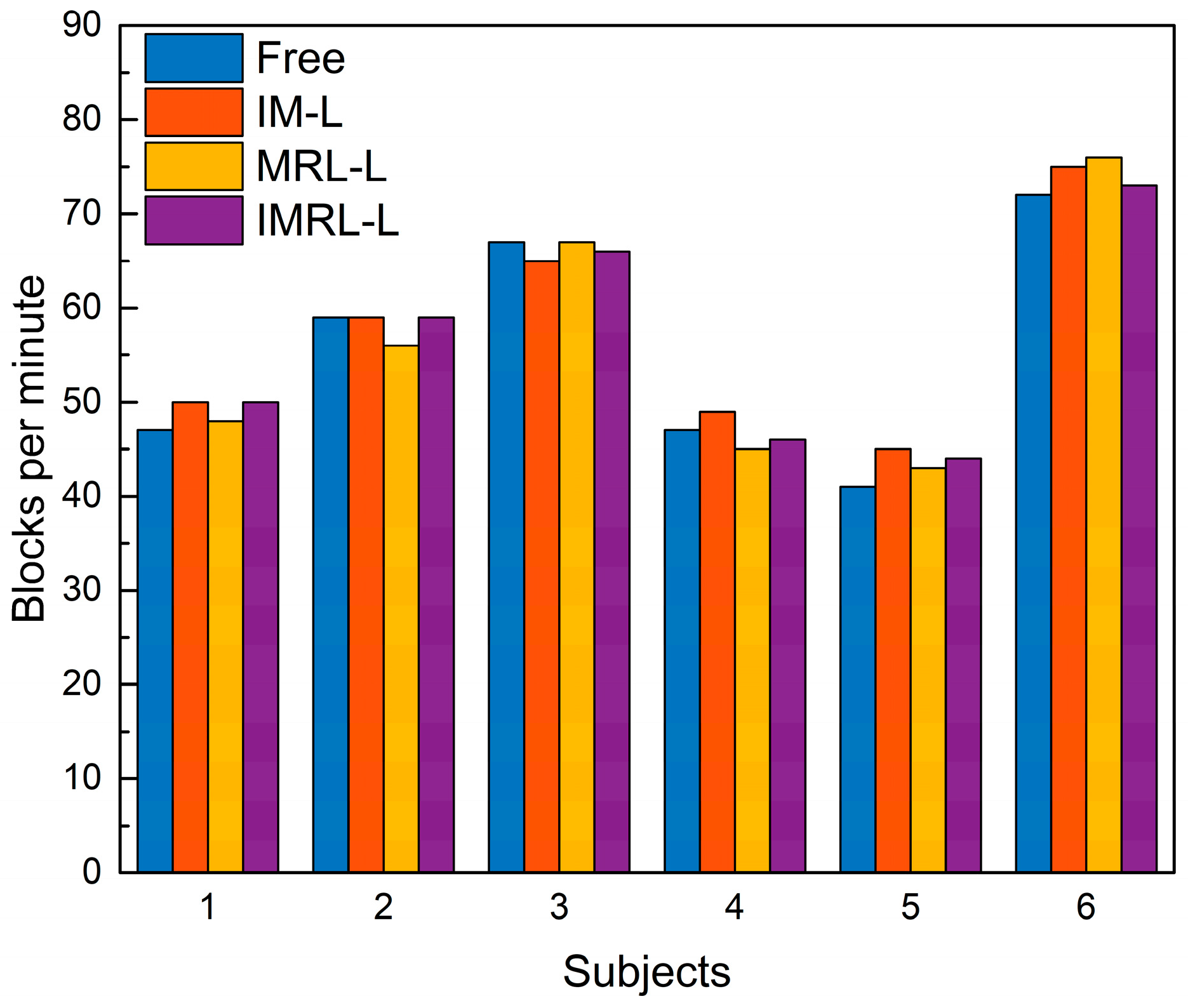
3.3. Grasping with a Soft Robotic Hand
4. Discussion and Conclusions
5. Limitations and Future Work
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Napier, J.; Tuttle, R.H. Hands; Princeton University Press: Princeton, NJ, USA, 1993. [Google Scholar]
- Bullock, I.; Ma, R.; Dollar, A. A Hand-Centric Classification of Human and Robot Dexterous Manipulation; IEEE Computer Society Press: Los Alamitos, CA, USA, 2013. [Google Scholar]
- Cooney, W.P.; Chao, E. Biomechanical analysis of static forces in the thumb during hand function. J. Bone Jt. Surg. Am. Vol. 1977, 59, 27–36. [Google Scholar] [CrossRef]
- Li, Z.M.; Jie, T. Coordination of thumb joints during opposition. J. Biomech. 2007, 40, 502–510. [Google Scholar] [CrossRef] [PubMed]
- Lin, H.T.; Kuo, L.C.; Liu, H.Y.; Wu, W.L.; Su, F.C. The three-dimensional analysis of three thumb joints coordination in activities of daily living. Clin. Biomech. 2011, 26, 371–376. [Google Scholar] [CrossRef] [PubMed]
- Grebenstein, M. Approaching Human Performance: The Functionality-Driven Awiwi Robot Hand; Springer: Berlin/Heidelberg, German, 2014. [Google Scholar]
- Youm, Y.; Gillespie, T.E.; Flatt, A.E.; Sprague, B. Kinematic investigation of normal MCP joint. J. Biomech. 1978, 11, 109–118. [Google Scholar] [CrossRef]
- Gillespie, T.E.; Flatt, A.E.; Youm, Y.; Sprague, B.L. Biomechanical evaluation of metacarpophalangeal joint prosthesis designs. J. Hand Surg. 1979, 4, 508–521. [Google Scholar] [CrossRef]
- Yuan, L.; Li, J.; Yang, D.; Yu, L.; Hong, L. Analysis on the joint independence of hand and wrist. In Proceedings of the 2016 IEEE International Conference on Advanced Intelligent Mechatronics, Banff, AB, Cananda, 12–15 July 2016. [Google Scholar]
- Vinjamuri, R.; Mao, Z.H.; Sclabassi, R.; Sun, M.; Medicine, B.; Conference, B.S. Time-Varying Synergies in Velocity Profiles of Finger Joints of the Hand during Reach and Grasp. In Proceedings of the 2007 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France, 23–26 August 2007; pp. 4846–4849. [Google Scholar]
- Ergen, H.I.; Oksuz, C. Evaluation of Load Distributions and Contact Areas in 4 Common Grip Types Used in Daily Living Activities. J. Hand Surg. 2019, 45, 251-e1. [Google Scholar] [CrossRef]
- Montagnani, F.; Controzzi, M.; Cipriani, C. Independent Long Fingers are not Essential for a Grasping Hand. Sci. Rep. 2016, 6, 35545. [Google Scholar] [CrossRef] [Green Version]
- Zarzoura, M.; Del Moral, P.; Awad, M.I.; Tolbah, F.A. Investigation into reducing anthropomorphic hand degrees of freedom while maintaining human hand grasping functions. Proc. Inst. Mech. Eng. Part H J. Eng. Med. 2019, 233, 279–292. [Google Scholar] [CrossRef]
- ShadowRobotCompany. Design of a Dextrous Hand for Advanced CLAWAR Applications; Shadow Robot Company: London, UK, 2003. [Google Scholar]
- Deshpande, A.D.; Xu, Z.; Weghe, M.J.V.; Brown, B.H.; Ko, J.; Chang, L.Y.; Wilkinson, D.D.; Bidic, S.M.; Matsuoka, Y. Mechanisms of the Anatomically Correct Testbed Hand. IEEE ASME Trans. Mechatron. 2013, 18, 238–250. [Google Scholar] [CrossRef]
- Belter, J.T.; Segil, J.L.; Dollar, A.M.; Weir, R.F. Mechanical design and performance specifications of anthropomorphic prosthetic hands: A review. J. Rehabil. Res. Dev. 2013, 50, 599–618. [Google Scholar] [CrossRef]
- Cordella, F.; Ciancio, A.L.; Sacchetti, R.; Davalli, A.; Cutti, A.G.; Guglielmelli, E.; Zollo, L. Literature Review on Needs of Upper Limb Prosthesis Users. Front. Neurosci. 2016, 10, 209. [Google Scholar] [CrossRef]
- Biddiss, E.A.; Chau, T.T. Upper limb prosthesis use and abandonment: A survey of the last 25 years. Prosthet. Orthot. Int. 2007, 31, 236–257. [Google Scholar] [CrossRef]
- Liu, X.; Zhao, Y.; Geng, D.; Chen, S.; Tan, X.; Cao, C. Soft Humanoid Hands with Large Grasping Force Enabled by Flexible Hybrid Pneumatic Actuators. Soft Robot. 2021, 8, 175–185. [Google Scholar] [CrossRef]
- Scharff, R.B.N.; Doubrovski, E.L.; Poelman, W.A.; Jonker, P.P.; Wang, C.C.L.; Geraedts, J.M.P. Towards Behavior Design of a 3D-Printed Soft Robotic Hand. In Soft Robotics: Trends, Applications and Challenges; Biosystems & Biorobotics; Springer: Cham, Switzerland, 2017; pp. 23–29. [Google Scholar]
- Zhou, J.; Yi, J.; Chen, X.; Liu, Z.; Wang, Z. BCL-13: A 13-DOF Soft Robotic Hand for Dexterous Grasping and In-Hand Manipulation. IEEE Robot. Autom. Lett. 2018, 3, 3379–3386. [Google Scholar] [CrossRef]
- Deimel, R.; Brock, O. A novel type of compliant and underactuated robotic hand for dexterous grasping. Int. J. Robot. Res. 2015, 35, 161–185. [Google Scholar] [CrossRef] [Green Version]
- Zhao, H.; O’Brien, K.; Li, S.; Shepherd, R.F. Optoelectronically innervated soft prosthetic hand via stretchable optical waveguides. Sci. Robot. 2016, 7, eaai7529. [Google Scholar] [CrossRef] [Green Version]
- She, Y.; Li, C.; Cleary, J.; Su, H.-J. Design and Fabrication of a Soft Robotic Hand with Embedded Actuators and Sensors. J. Mech. Robot. 2015, 7, 021007. [Google Scholar] [CrossRef]
- Xu, Z.; Todorov, E. Design of a Highly Biomimetic Anthropomorphic Robotic Hand towards Artificial Limb Regeneration. In Proceedings of the 2016 IEEE International Conference on Robotics and Automation (ICRA), Stockholm, Sweden, 16–21 May 2016. [Google Scholar]
- Ficuciello, F.; Pisani, G.; Marcellini, S.; Siciliano, B. The PRISMA Hand I: A novel underactuated design and EMG/voice-based multimodal control. Eng. Appl. Artif. Intell. 2020, 93, 103698. [Google Scholar] [CrossRef]
- Festo. Festo_BionicSoftHand_en. Available online: https://www.festo.com/PDF_Flip/corp/Festo_BionicSoftHand/en/2-3/ (accessed on 10 October 2021).
- Gracia-Ibáñez, V.; Sancho-Bru, J.L.; Vergara, M. Relevance of grasp types to assess functionality for personal autonomy. J. Hand Ther. 2018, 31, 102–110. [Google Scholar] [CrossRef] [Green Version]
- Cutkosky, M. On grasp choice, grasp models, and the design of hands for manufacturing tasks. IEEE Trans. Robot. Autom. 1989, 5, 269–279. [Google Scholar] [CrossRef]
- Feix, T.; Romero, J.; Schmiedmayer, H.-B.; Dollar, A.M.; Kragic, D. The GRASP Taxonomy of Human Grasp Types. IEEE Trans. Hum.-Mach. Syst. 2016, 46, 66–77. [Google Scholar] [CrossRef]
- Cini, F.; Ortenzi, V.; Corke, P.; Controzzi, M.J.S.R. On the choice of grasp type and location when handing over an object. Sci. Robot. 2019, 4, eaau9757. [Google Scholar] [CrossRef]
- Demers, L.A.A.; Gosselin, C. Kinematic Design of a Planar and Spherical Mechanism for the Abduction of the Fingers of an Anthropomorphic Robotic Hand. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011. [Google Scholar]
- Hill, W.; Kyberd, P.; Hermansson, L.N.; Hubbard, S.; Stavdahl, Ø.; Swanson, S. Upper Limb Prosthetic Outcome Measures (ULPOM): A Working Group and Their Findings. J. Prosthet. Orthot. 2009, 21, 69–82. [Google Scholar] [CrossRef]
- Mathiowetz, V.; Volland, G.; Kashman, N.; Weber, K. Adult Norms for the Box and Block Test of Manual Dexterity. Am. J. Occup. Ther. Off. Publ. Am. Occup. Ther. Assoc. 1985, 39, 386–391. [Google Scholar] [CrossRef] [Green Version]
- Miller, A.; Allen, P. GraspIt!: A versatile simulator for robotic grasping. IEEE Robot. Autom. Mag. 2005, 11, 110–122. [Google Scholar] [CrossRef]
- Ciocarlie, M.; Goldfeder, C.; Allen, P. Dimensionality reduction for hand-independent dexterous robotic grasping. In Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots & Systems, San Diego, CA, USA, 29 October–2 November 2007. [Google Scholar]
- Ciocarlie, M.T.; Allen, P.K. Hand Posture Subspaces for Dexterous Robotic Grasping. Int. J. Robot. Res. 2009, 28, 851–867. [Google Scholar] [CrossRef]
- Ingber, L. Very fast simulated re-annealing. Math. Comput. Model. 1989, 12, 967–973. [Google Scholar] [CrossRef] [Green Version]
- Yan, Y.; Wang, Y.; Chen, X.; Shi, C.; Yu, J.; Cheng, C. A tendon-driven prosthetic hand using continuum structure. In Proceedings of the 2020 42nd Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Montreal, QC, Canada, 20–24 July 2020; IEEE: Manhattan, NY, USA, 2020; Volume 2020, pp. 4951–4954. [Google Scholar]
- Montagnani, F.; Controzzi, M.; Cipriani, C. Is it Finger or Wrist Dexterity That is Missing in Current Hand Prostheses? IEEE Trans. Neural Syst. Rehabil. Eng. 2015, 23, 600–609. [Google Scholar] [CrossRef] [PubMed]
- Bain, G.I.; Polites, N.; Higgs, B.G.; Heptinstall, R.J.; Mcgrath, A.M. The functional range of motion of the finger joints. J. Hand Surg. 2015, 40, 406–411. [Google Scholar] [CrossRef]
- Seo, N.J.; Armstrong, T.J. Investigation of grip force, normal force, contact area, hand size, and handle size for cylindrical handles. Hum. Factors 2008, 50, 734–744. [Google Scholar] [CrossRef]
- Edgren, C.S.; Radwin, R.G.; Irwin, C.B. Grip Force Vectors for Varying Handle Diameters and Hand Sizes. J. Hum. Factors Ergon. Soc. 2004, 46, 244. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Age | Gender | L1 | L2 | L3 | D1 | D2 | D3 | D4 | H | Hand Length | Hand Strength | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Subject 1 (S1) | 24 | M | 22.3 | 20.4 | 20.1 | 19.2 | 18.3 | 18.3 | 17.2 | 8.2 | 188 | 48.33 |
| Subject 2 (S2) | 26 | M | 20.8 | 20.6 | 20.9 | 19.1 | 18.4 | 18.4 | 16.5 | 7.4 | 187 | 65.42 |
| Subject 3 (S3) | 21 | M | 21.5 | 20.0 | 20.5 | 17.5 | 17.9 | 17.2 | 15.7 | 8.2 | 170 | 73.28 |
| Subject 4 (S4) | 29 | M | 22.5 | 21.4 | 20.0 | 19.3 | 19.4 | 18.9 | 18.0 | 9.8 | 162 | 62.0 |
| Subject 5 (S5) | 30 | F | 20.0 | 19.6 | 19.5 | 17.8 | 17.6 | 16.4 | 14.2 | 5.6 | 156 | 43.8 |
| Subject 6 (S6) | 38 | F | 22.5 | 20.5 | 19.3 | 17.8 | 17.5 | 16.5 | 15.2 | 6.4 | 164 | 61.63 |
| IM-L versus Free | MRL-L versus Free | IMRL-L versus Free | ||
|---|---|---|---|---|
| Grasping with human hand | Normalized grasp size | p = 0.335 | p = 0.619 | p = 0.009 * |
| Normalized grasp force | p = 0.335 | p = 0.295 | p = 0.039 * | |
| Grasping with simulator | Average grasp quality | p = 0.3095 | p = 0.0931 | p = 0.0649 |
| Grasping with robotic hand | Success rate | —— | —— | p = 0.0043 * |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, Y.; Cheng, C.; Guan, M.; Zhang, J.; Wang, Y. The Influence of the Abduction Joints of Four Fingers to Grasp: Experimental and Simulated Verification. Appl. Sci. 2021, 11, 11960. https://doi.org/10.3390/app112411960
Yan Y, Cheng C, Guan M, Zhang J, Wang Y. The Influence of the Abduction Joints of Four Fingers to Grasp: Experimental and Simulated Verification. Applied Sciences. 2021; 11(24):11960. https://doi.org/10.3390/app112411960
Chicago/Turabian StyleYan, Yadong, Chang Cheng, Mingjun Guan, Jianan Zhang, and Yu Wang. 2021. "The Influence of the Abduction Joints of Four Fingers to Grasp: Experimental and Simulated Verification" Applied Sciences 11, no. 24: 11960. https://doi.org/10.3390/app112411960
APA StyleYan, Y., Cheng, C., Guan, M., Zhang, J., & Wang, Y. (2021). The Influence of the Abduction Joints of Four Fingers to Grasp: Experimental and Simulated Verification. Applied Sciences, 11(24), 11960. https://doi.org/10.3390/app112411960