
Scaled Experiment of the Detonation Control System for the High-Speed Penetration on Concrete



Abstract
1. Introduction
2. Characteristics Analysis of the High-Speed Deep Penetration
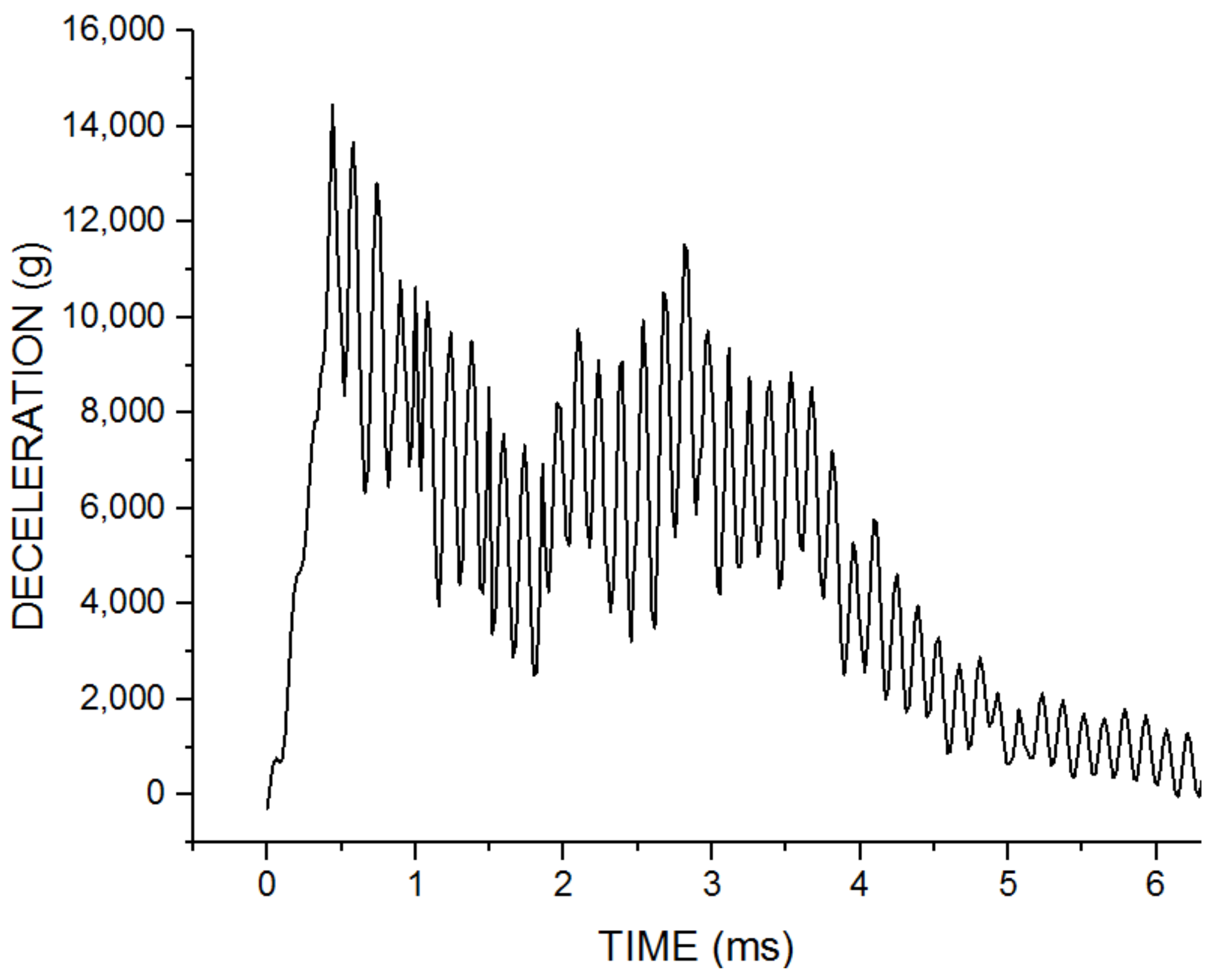
- The deceleration peak is very high, which can reach orders of magnitude;
- The time history of deceleration is very long, and the significantly large oscillation time is usually at the millisecond level;
- The attenuation of deceleration signal is obvious in the middle and rear section of the curve, and the deceleration can decay to orders of magnitude.
3. Parameter Analysis of the Deceleration
3.1. The Deceleration Model of the Deep Penetration
3.2. Parameter Analysis of the Projectile
3.2.1. The Nose Shape of the Projectile
3.2.2. The Diameter and Length of the Projectile
3.3. The Compressive Strength of the Target
3.4. The Impact Velocity
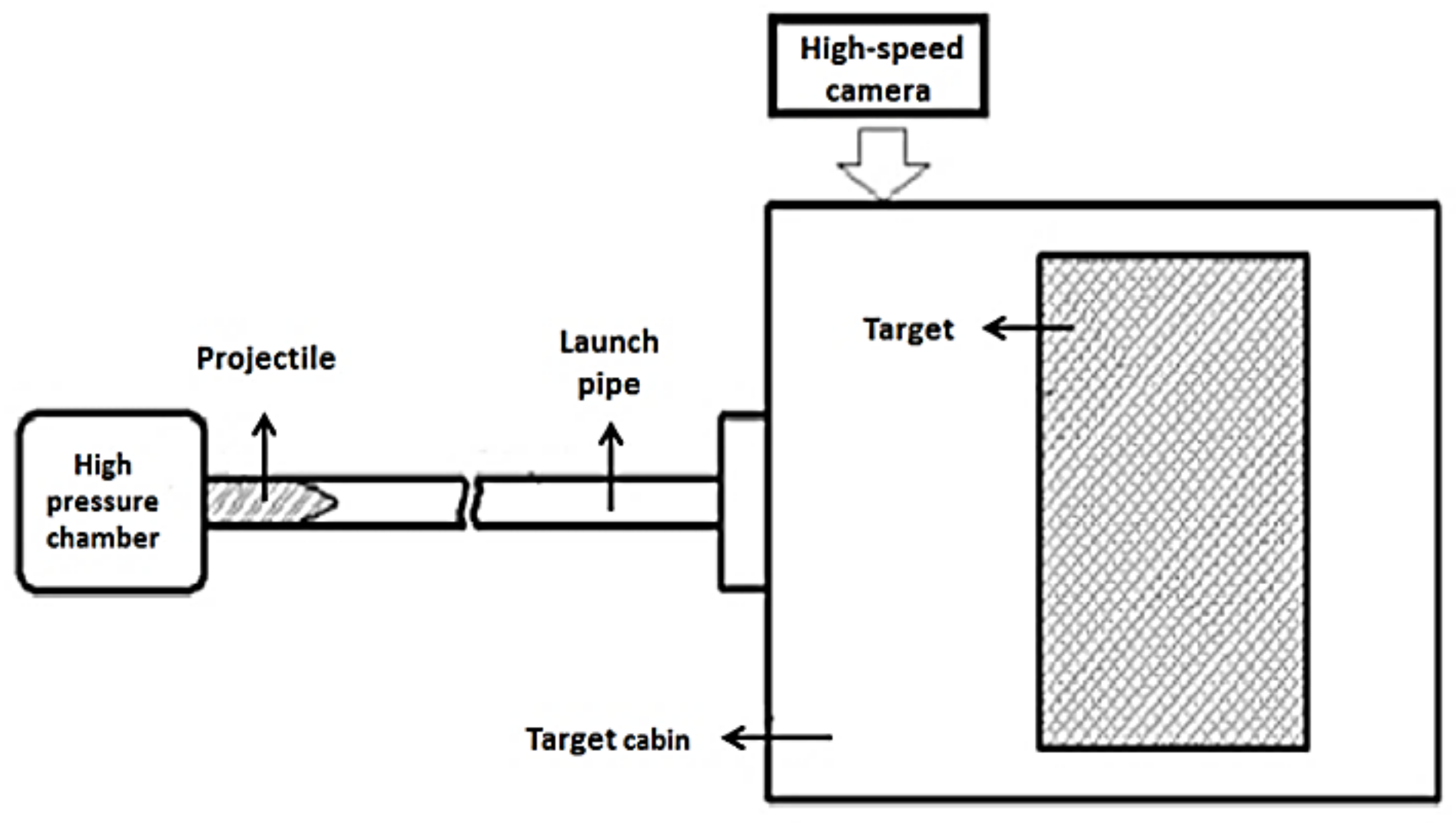
4. The FE Simulation Scheme of the Scaled Experiment
4.1. Description FEM
4.2. Material Model
4.3. Results
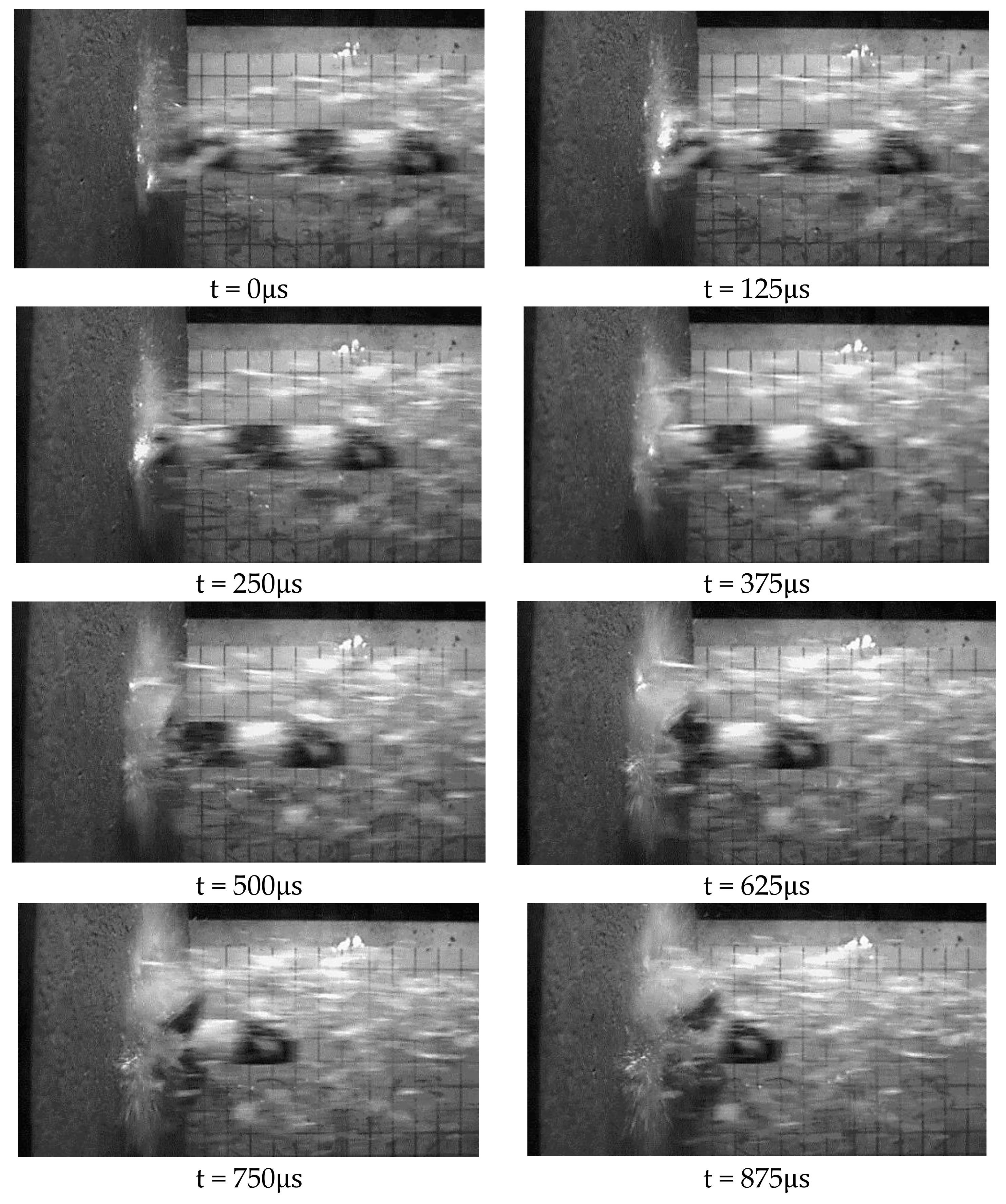
5. The Verification Experiment: The Scaled Experiment
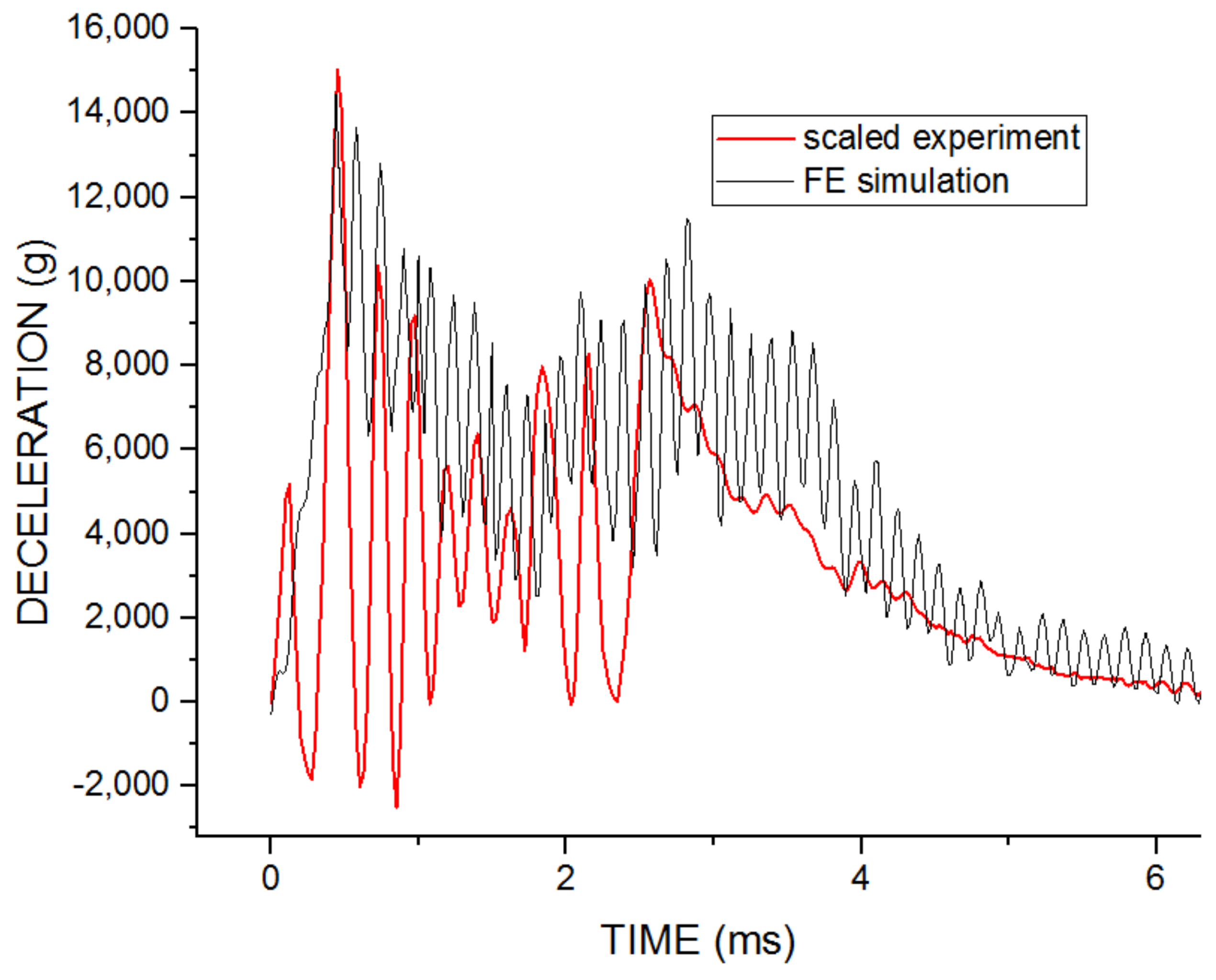
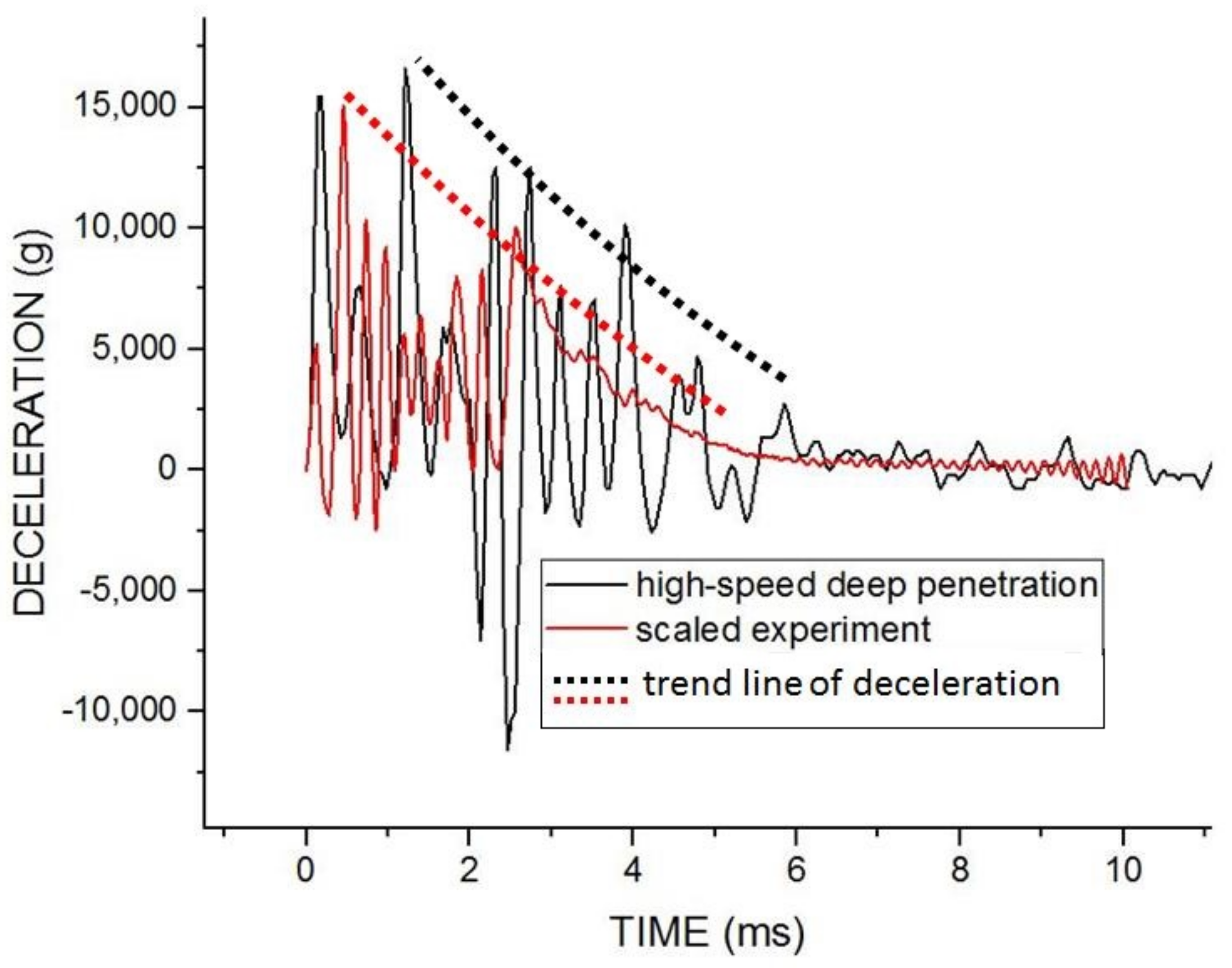
- The deceleration peaks of these two curves are in the same order of magnitude, with a difference of only 9.4%. The deceleration oscillates greatly before 5 ms. This shows that the detonation control system can experience extremely complex working environments in the scaled experiment.
- The time history of the two deceleration curves is similar before the large attenuation, and then they are in a small oscillation for a long time in the later stage. This shows that in the scaled experiment, it can create a long-time complex working environment for the detonation control system.
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Mahesh, V.; Joladarashi, S.; Kulkarni, S.M. Damage mechanics and energy absorption capabilities of natural fiber reinforced elastomeric based bio composite for sacrificial structural applications. Def. Technol. 2021, 17, 161–176. [Google Scholar] [CrossRef]
- Kennedy, R.P. A review of procedures for the analysis and design of concrete structures to resist missile impact effect. Nucl. Eng. Des. 1976, 37, 183–203. [Google Scholar] [CrossRef]
- Chen, X.W.; Li, Q.M. Deep penetration of a non-deformable projectile with different geometrical characteristics. Int. J. Impact Eng. 2002, 27, 619–637. [Google Scholar] [CrossRef]
- Li, Q.M.; Chen, X.W. Dimensionless formulae for penetration depth of concrete target impacted by a non-deformable projectile. Int. J. Impact Eng. 2003, 28, 93–116. [Google Scholar] [CrossRef]
- He, L.L.; Chen, X.W.; Wang, Z.H. Study on the penetration performance of concept projectile for high-speed penetration (CPHP). Int. J. Impact Eng. 2016, 94, 1–12. [Google Scholar] [CrossRef]
- Peng, Y.; Wu, H.; Fang, Q.; Gong, Z.M. Geometrical scaling effect for penetration depth of hard projectiles into concrete targets. Int. J. Impact Eng. 2018, 120, 46–59. [Google Scholar] [CrossRef]
- Huang, M.; Ou, Z.C.; Tong, Y.; Duan, Z.P.; Huang, F.L. Similarity analysis of Projectile Penetration into Concrete. Def. Sci. J. 2018, 120, 46–59. [Google Scholar] [CrossRef]
- Me-Bar, Y. A method for scaling ballistic penetration phenomena. Int. J. Impact Eng. 1997, 19, 821–829. [Google Scholar] [CrossRef]
- Canfield, J.; Clator, I. Development of a scaling law and techniques to investigate penetration in concrete. In NWL Report No 2057; US Naval Weapons Laboratory: Dahlgren, VA, USA, 1966. [Google Scholar]
- Li, M.Y.; Jing, H.S.; Liu, Q.; Wu, P. Penetration Fuze Scaling Test Method of Using Small Projectile Simulating Big Ones. J. Detect. Control. 2017, 39, 21–24. [Google Scholar]
- Yin, H. Kriging Model Approach to Modeling Study on Relationship between Molecular Quantitative Structures and Chemical Properties; Hong Kong Baptist University: Hong Kong, China, 2005. [Google Scholar]
- Zheng, H.; He, Y.; Guo, L.; Zhang, X.F.; Zhang, N.S. Numerical simulations of normal penetration of concrete target with ogive-nose steel projectile by high-speed. J. Syst. Simul. 2013, 25, 1508–1512. [Google Scholar]
- Huang, M.R.; Gu, X.H.; Gao, Y.H. The Experimental and Numerical Studies on the Penetrating into Concrete Targets with Kinetic Energy Projectiles. ICMEM 2009, 2, 1237–1241. [Google Scholar]
- Forrestal, M.J.; Tzou, D.Y. A spherical cavity-expansion penetration model for concrete targets. Int. J. Solids Struct. 1997, 34, 4127–4146. [Google Scholar] [CrossRef]
- Forrestal, M.J.; Altman, B.S.; Cargile, J.D. An empirical equation for penetration depth of ogive-nose projectiles into concrete targets. Int. J. Impact Eng. 1994, 15, 395–405. [Google Scholar] [CrossRef]
- Forrestal, M.J.; Frew, D.J.; Hanchak, S.J. Penetration of grout and concrete targets with ogive-nose steel projectiles. Int. J. Impact Eng. 1996, 18, 465–476. [Google Scholar] [CrossRef]
- Gao, S.Q.; Liu, H.P.; Jin, L.; Niu, S.H. Mechanics of Concrete Penetration; China Science and Technology Press: Beijing, China, 2012. [Google Scholar]
- Chen, S.Y.; Huang, C.G. A semi-empirical equation of penetration depth on concrete target impacted by ogive-nose projectiles. J. Phys. IV 2006, 134, 403–408. [Google Scholar] [CrossRef]
- Siddiqui, N.A.; Choudhury, M.A.; Abbas, H. Reliability analysis of projectile penetration into geological targets. Reliab. Eng. Syst. Safe. 2002, 78, 13–19. [Google Scholar] [CrossRef]
- Baldwin, J.L. Vertical Water Entry of Some Ogives, Cones, and Cusps; Naval Surface Weapons Center, White Oak Lab: Silver Spring, MD, USA, 1975. [Google Scholar]
- He, L.L.; Chen, X.W. Analyses of the penetration process considering mass loss. Eur. J. Mech. A Solids 2011, 30, 145–157. [Google Scholar] [CrossRef]
- Chen, X.W.; He, L.L.; Yang, S.Q. Modeling on mass abrasion of kinetic energy penetrator. Eur. J. Mech. A Solids 2010, 26, 585–597. [Google Scholar] [CrossRef]
- He, L.L.; Chen, X.W. Simulation of shape variation of projectile nose during high-speed penetration into concrete. Theor. Appl. Mech. Lett. 2012, 2, 29–32. [Google Scholar] [CrossRef][Green Version]
- Xiao, Q.Q.; Huang, Z.X.; Zu, X.D.; Jia, X.; Zhu, Q.F.; Cai, W. Shaped charge penetration into high- and ultrahigh-strength Steel—Fiber reactive powder concrete targets. Def. Technol. 2020, 16, 217–224. [Google Scholar] [CrossRef]
- Shi, C.C.; Wang, M.Y.; Li, M.S. A model of depth calculation for projectile penetration into dry sand and comparison with experiments. Int. J. Impact Eng. 2014, 73, 112–122. [Google Scholar] [CrossRef]
- Borg, J.P.; Morrissey, M.P.; Perich, C.A.; Vogler, T.J.; Chhabildas, L.C. In Situ velocity and stress characterization of a projectile penetrating a sand target: Experimental measurements and continuum simulations. Int. J. Impact Eng. 2013, 51, 23–35. [Google Scholar] [CrossRef]
- An, X.Y.; Tian, C.; Sun, Q.T.; Dong, Y.X. Effects of material of metallic frame on the penetration resistances of ceramic-metal hybrid structures. Def. Technol. 2019, 16, 77–87. [Google Scholar] [CrossRef]
- Landi, L.; Stecconi, A.; Pera, F.; Prete, E.D. Calibration of an Air Cannon for Safety Penetration Tests. In Proceedings of the 29th European Safety and Reliability Conference (ESREL), Hannover, Germany, 22–26 September 2019. [Google Scholar]
- Xu, X.; Gao, S.Q.; Zhang, D.M.; Niu, S.H.; Jin, L.; Ou, Z.C. Mechanical behavior of liquid nitrile rubber-modified epoxy resin: Experiments, constitutive model and application. Int. J. Mech. Sci. 2019, 151, 46–60. [Google Scholar] [CrossRef]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Independent Parameters | |
|---|---|
| Projectile | (equivalent density) |
| (diameter) | |
| (projectile body length) | |
| (caliber-radius-head) | |
| Target | (initial density) (compressive strength) |
| Design Variable | Value |
|---|---|
| (mm) | 67, 77, 87 |
| 6, 8, 10 |
| Density ) | Young’s Modulus (GPa) | Tangent Modulus (GPa) | Yield Stress (GPa) |
|---|---|---|---|
| 210 | 2.1 | 0.5 |
| Density () | Shear Modulus (GPa) | Young’s Modulus (GPa) | Yield Stress Constant (GPa) | Strain Hardening Constant (GPa) |
|---|---|---|---|---|
| 7850 | 85 | 211 | 1.327 | 51.186 |
| strain hardening exponent | Strain rate correlation coefficient | temperature correlation coefficient | Melt temperature (k) | Failure parameter |
| 0.232 | 0.0034 | 1.27 | 1793 | 0.8 |
| Density ) | Quasi-Static Uniaxial Compressive Strength (MPa) | Maximum Tensile Hydrostatic Pressure (MPa) | Locking Volumetric Strain |
|---|---|---|---|
| 2440 | 30 | 3.19 | 0.1 |
| Normalized cohesive strength | Normalized pressure hardening | Strain rate coefficient | Pressure hardening exponent |
| 0.89 | 1.65 | 0.007 | 0.76 |
| Crushing pressure (MPa) | Shear modulus (GPa) | ||
| 16 | 18 |
| High-Speed Deep Penetration | Scaled Experiment | The Difference | |
|---|---|---|---|
| Deceleration Peak | 16,598 g | 15,033 g | 9.4% |
| Time (Back to 0) | about 6 ms | 5.5 ms | about 8% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yan, H.; Gao, S.; Jin, L. Scaled Experiment of the Detonation Control System for the High-Speed Penetration on Concrete. Appl. Sci. 2021, 11, 11556. https://doi.org/10.3390/app112311556
Yan H, Gao S, Jin L. Scaled Experiment of the Detonation Control System for the High-Speed Penetration on Concrete. Applied Sciences. 2021; 11(23):11556. https://doi.org/10.3390/app112311556
Chicago/Turabian StyleYan, Huan, Shiqiao Gao, and Lei Jin. 2021. "Scaled Experiment of the Detonation Control System for the High-Speed Penetration on Concrete" Applied Sciences 11, no. 23: 11556. https://doi.org/10.3390/app112311556
APA StyleYan, H., Gao, S., & Jin, L. (2021). Scaled Experiment of the Detonation Control System for the High-Speed Penetration on Concrete. Applied Sciences, 11(23), 11556. https://doi.org/10.3390/app112311556