
Vehicle Routing Optimization System with Smart Geopositioning Updates


Abstract
:1. Introduction
2. Problem Description and Related Works
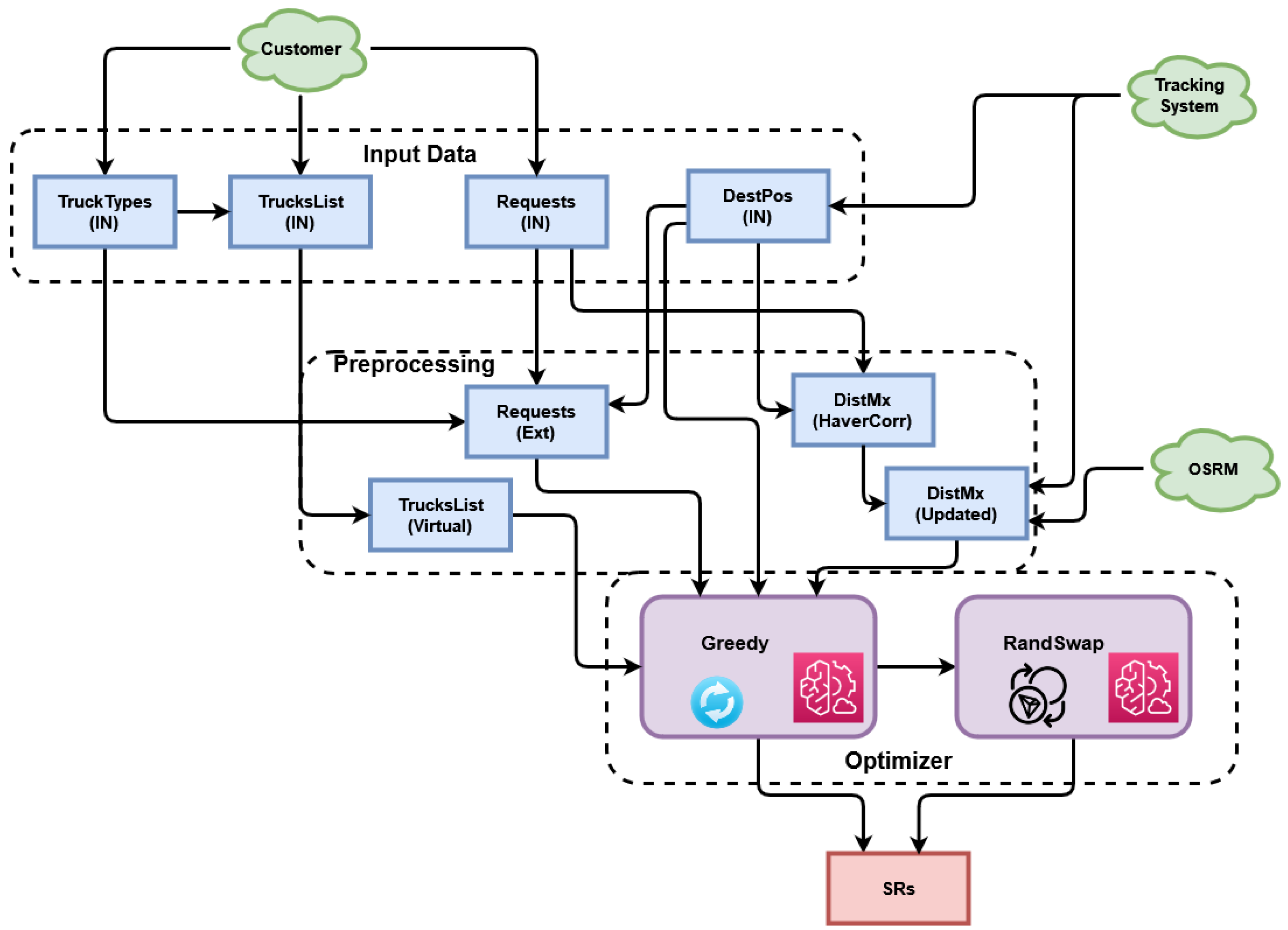
3. Materials and Methods
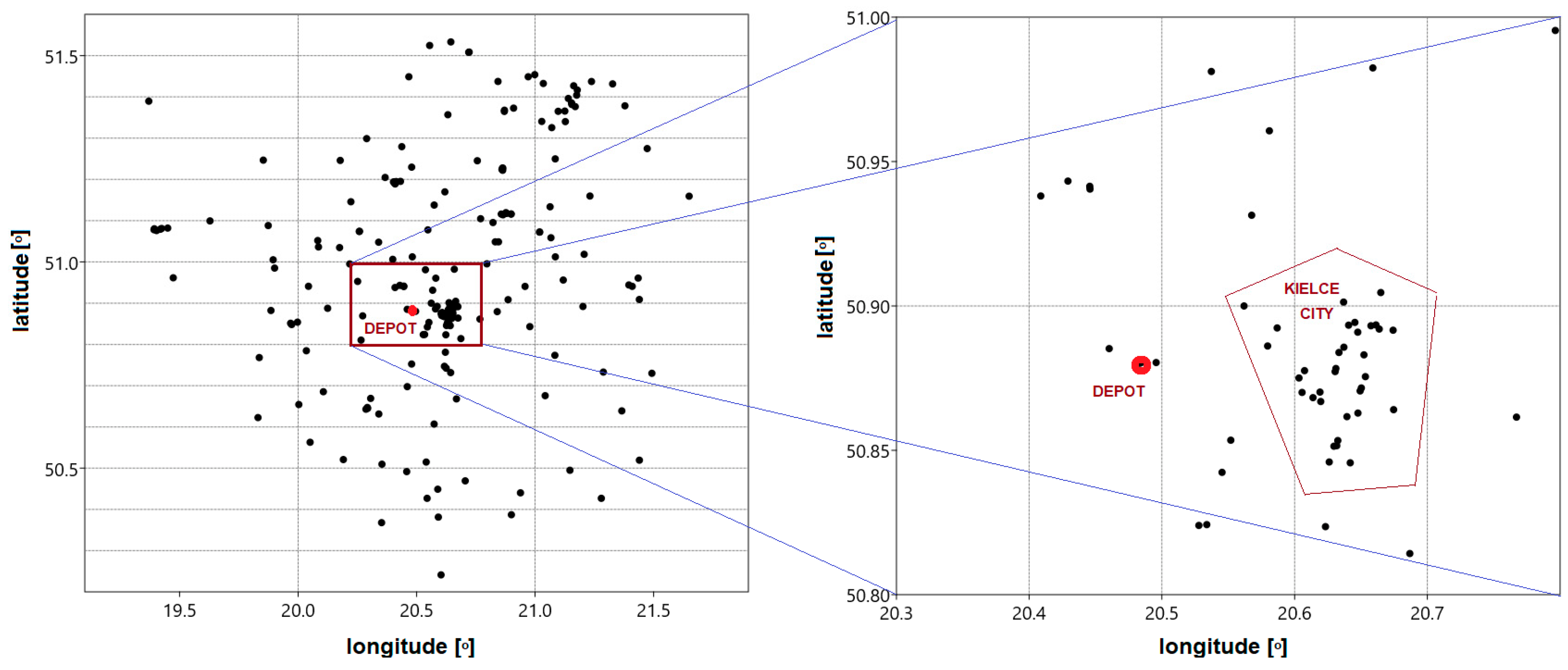
- pointId—unique identifier of the point.
- pointName—point name.
- pointLatitude—the latitude of the point.
- pointLongitude—the longitude of the point.
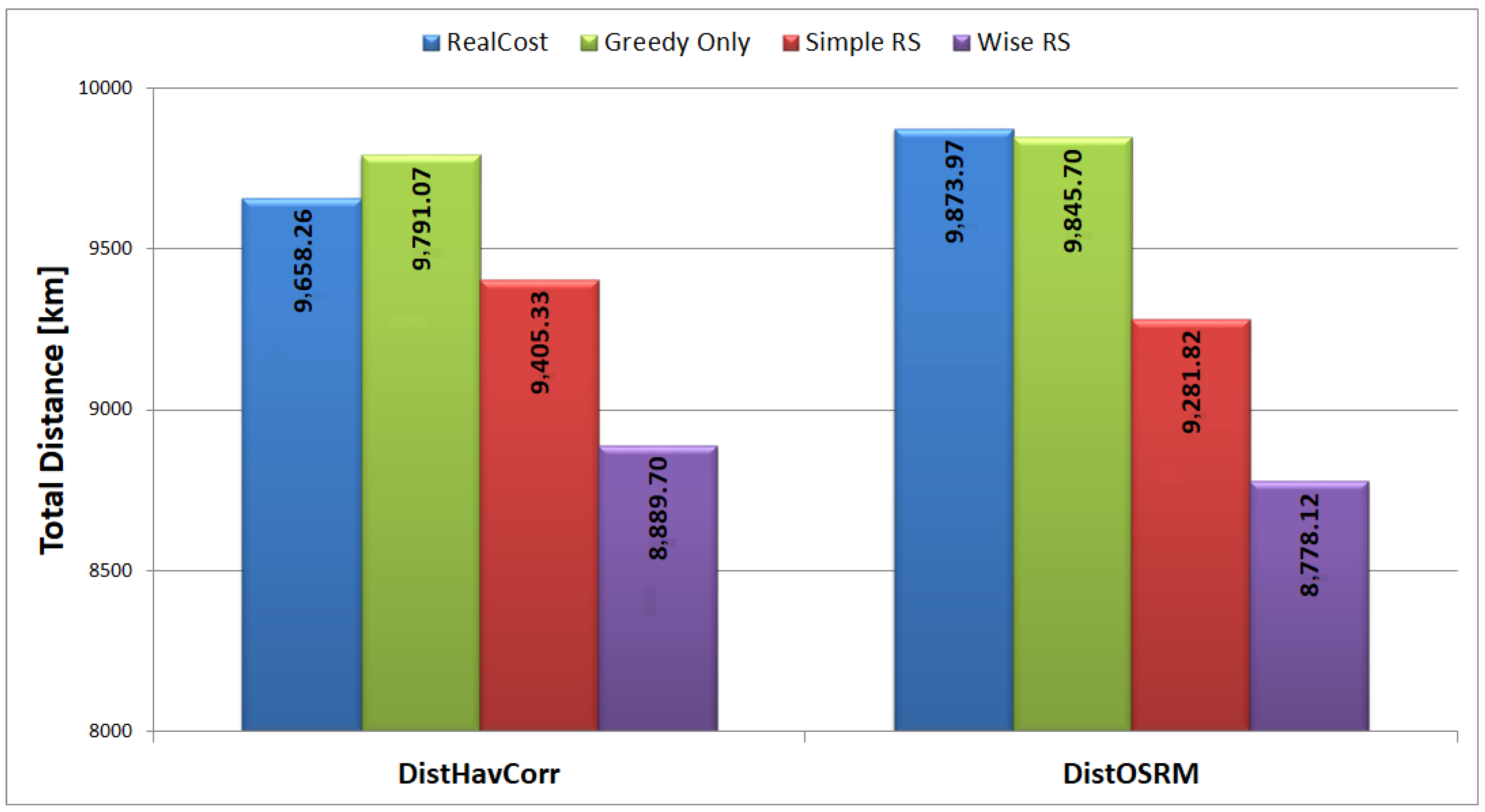
- Greedy only
- Greedy + Simple RandSwap and,
- Greedy + Wise RandSwap
4. Results
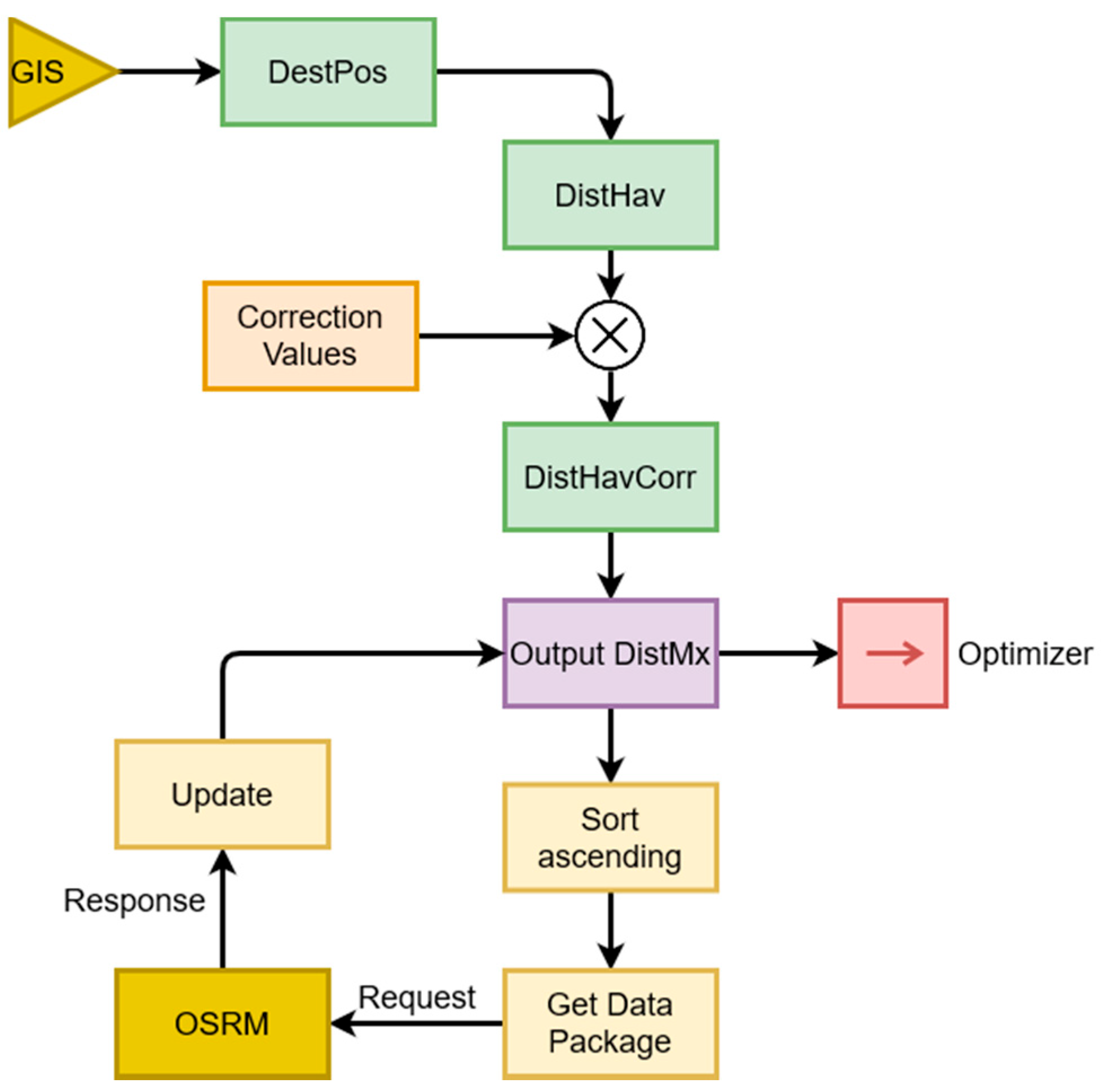
4.1. Getting the DestPos and DistMx
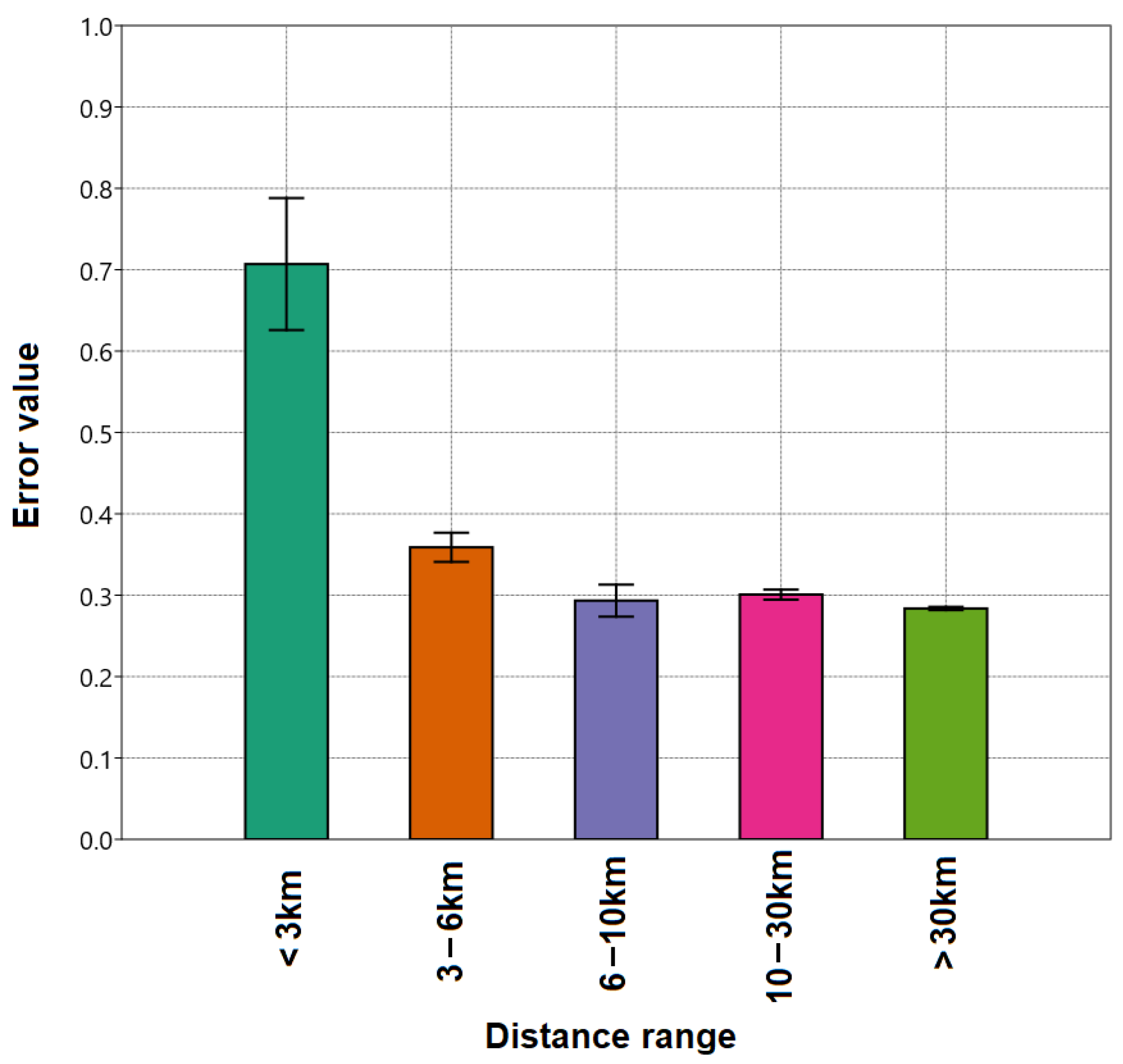
4.2. Temporary DistMx Calculation
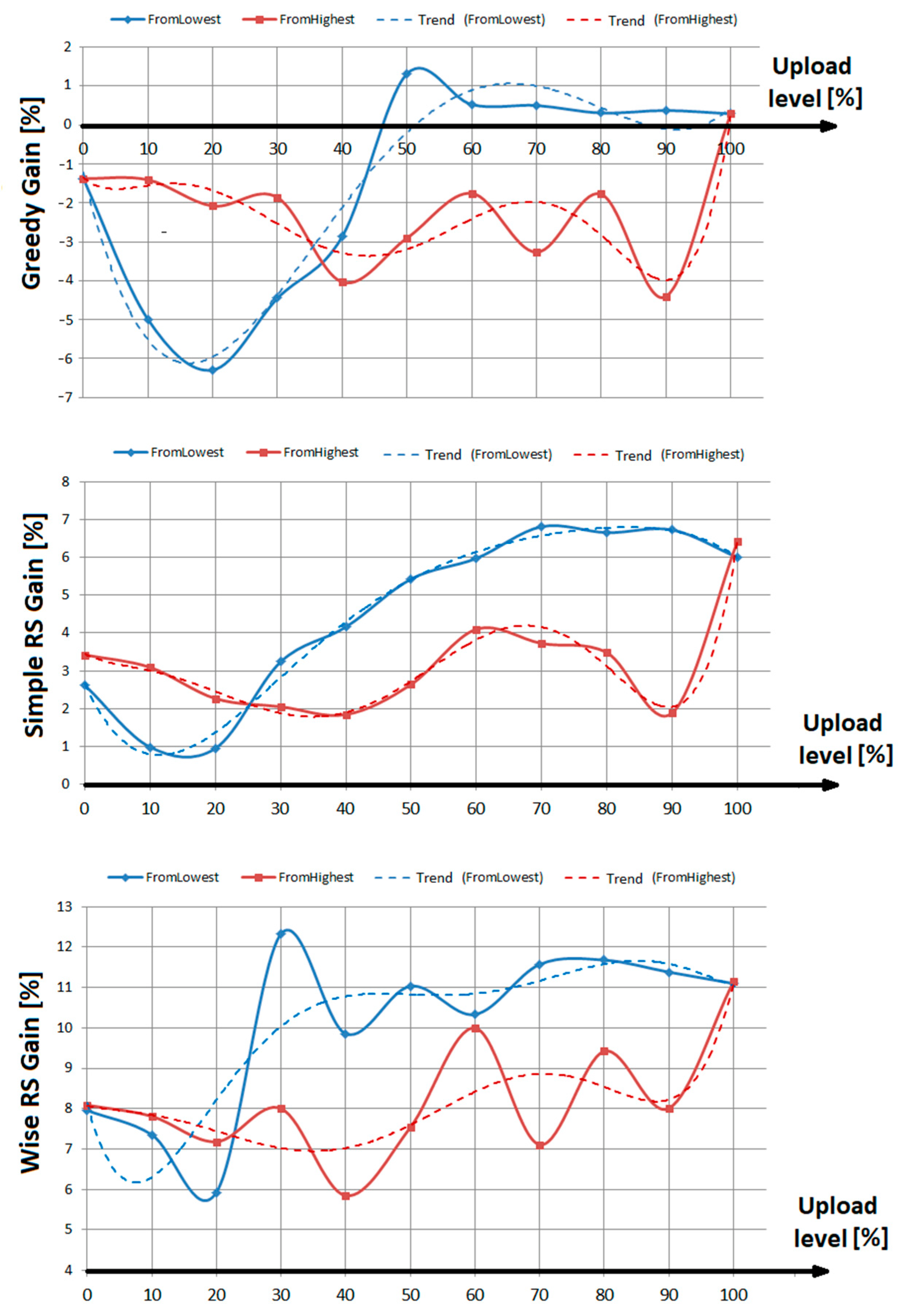
4.3. Infuence of Distance Matrix Upload on Optimizer Cost Reduction
5. Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Dantzig, G.; Ramser, J. The truck dispatching problem. Manag. Sci. 1959, 6, 80–91. [Google Scholar] [CrossRef]
- Clarke, G.; Wright, J.W. Scheduling of vehicles from central depot to a number of delivery points. Oper. Res. 1964, 12, 568–582. [Google Scholar] [CrossRef]
- Hota, J.; Ghosh, D. Workforce Analytics Approach: An Emerging Trend of Workforce Management. AIMS Int. J. Manag. 2013, 7, 167–179. Available online: https://ssrn.com/abstract=2332713 (accessed on 5 September 2021).
- Workforce Management: How to Optimize Team Productivity. Available online: https://asana.com/pl/resources/workforce-management (accessed on 5 September 2021).
- Konstantakopoulos, G.D.; Gayialis, S.P.; Kechagias, E.P. Vehicle routing problem and related algorithms for logistics distribution: A literature review and classification. Oper. Res. Int. J. 2020, 1–30. [Google Scholar] [CrossRef]
- Zhang, H.; Ge, H.; Yang, J.; Tong, Y. Review of Vehicle Routing Problems: Models, Classification and Solving Algorithms. Arch. Comput. Method Eng. 2021, 1–27. [Google Scholar] [CrossRef]
- Psaraftis, H.S.; Wen, M.; Kontovas, C.A. Dynamic vehicle routing problems: Three decades and counting. Networks 2016, 67, 3–31. [Google Scholar] [CrossRef] [Green Version]
- Braekers, K.; Ramaekers, K.; Van Nieuwenhuyse, I. The vehicle routing problem: State of the art classification and review. Comput. Ind. Eng. 2016, 99, 300–313. [Google Scholar] [CrossRef]
- Katoch, S.; Chauhan, S.S.; Kumar, V. A review on genetic algorithm: Past, present, and future. Multimed. Tools Appl. 2021, 80, 8091–8126. [Google Scholar] [CrossRef]
- Guilmeau, T.; Chouzenoux, E.; Elvira, V. Simulated annealing: A review and a new scheme. In Proceedings of the SSP 2021—IEEE Statistical Signal Processing Workshop, Rio de Janeiro, Brazil, 11–14 July 2021; pp. 1–5. Available online: https://hal.inria.fr/hal-03275401 (accessed on 12 November 2021).
- Suman, B.; Kumar, P. A Survey of Simulated Annealing as a Tool for Single and Multiobjective Optimization. J. Operl. Res. Soc. 2006, 57, 1143–1160. Available online: http://www.jstor.org/stable/4102365 (accessed on 12 November 2021). [CrossRef]
- Coronado de Koster, O.A.; Domínguez-Navarro, J.A. Multi-Objective Tabu Search for the Location and Sizing of Multiple Types of FACTS and DG in Electrical Networks. Energies 2020, 13, 2722. [Google Scholar] [CrossRef]
- Chen, J.; Gui, P.; Ding, T.; Na, S.; Zhou, Y. Optimization of Transportation Routing Problem for Fresh Food by Improved Ant Colony Algorithm Based on Tabu Search. Sustainability 2019, 11, 6584. [Google Scholar] [CrossRef] [Green Version]
- Cordon, O.; Herrera, F.; Stützle, T. A review on the ant colony optimization metaheuristic: Basis, models and new trends. Mathw. Soft Comput. 2003, 9, 141–175. [Google Scholar]
- Jain, N.K.; Nangia, U.; Jain, J. A Review of Particle Swarm Optimization. J. Inst. Eng. India Ser. 2018, 99, 407–411. [Google Scholar] [CrossRef]
- Lopes Silva, M.A.; de Souza, S.R.; Freitas Souza, M.J.; de França Filho, M.F. Hybrid metaheuristics and multi-agent systems for solving optimization problems: A review of frameworks and a comparative analysis. Appl. Soft Comput. 2018, 71, 433–459. [Google Scholar] [CrossRef]
- Talbi, E.G. Hybrid Metaheuristics for Multi-Objective Optimization. J. Algorithms Comput. Technol. 2015, 9, 41–63. [Google Scholar] [CrossRef] [Green Version]
- Boelaert, M.; Arbyn, M.; Van der Stuyft, P. Geographical information systems (GIS), gimmick or tool for health district management. Trop. Med. Int. Health 1998, 3, 163–165. [Google Scholar] [CrossRef]
- Gatrell, A.C.; Elliot, S.J. Geographies of Health: An Introduction, 2nd ed.; Wiley-Blackwell: Malden, MA, USA, 2009. [Google Scholar]
- Shen, L.; Stopher, P.R. Review of GPS Travel Survey and GPS, Data-Processing Methods. Transp. Rev. 2014, 34, 316–334. [Google Scholar] [CrossRef]
- Tsakiri, M.; Stewart, M.; Forward, T.; Sandison, D.; Walker, J. Urban Fleet Monitoring with GPS and GLONASS. J. Navig. 1998, 51, 382–393. [Google Scholar] [CrossRef]
- Hu, Y.; Chiu, Y.; Hsu, C.; Chang, Y. Identifying Key Factors for Introducing GPS-Based Fleet Management Systems to the Logistics Industry. Math. Probl. Eng. 2015, 2015, 413203. [Google Scholar] [CrossRef] [Green Version]
- Pluvinet, P.; Gonzalez-Feliu, J.; Ambrosini, C. GPS data analysis for understanding urban goods movement. Procedia Soc. Behav. Sci. 2012, 39, 450–462. [Google Scholar] [CrossRef] [Green Version]
- Rojas, B.; Bolaños, C.; Salazar-Cabrera, R.; Ramírez-González, G.; Pachón de la Cruz, A.; Madrid Molina, J.M. Fleet Management and Control System for Medium-Sized Cities Based in Intelligent Transportation Systems: From Review to Proposal in a City. Electronics 2020, 9, 1383. [Google Scholar] [CrossRef]
- Zambrano-Martinez, J.L.; Calafate, C.T.; Soler, D.; Lemus-Zúñiga, L.G.; Cano, J.C.; Manzoni, P.; Gayraud, T. A centralized route-management solution for autonomous vehicles in urban areas. Electronics 2019, 8, 722. [Google Scholar] [CrossRef] [Green Version]
- Weyns, D.; Holvoet, T.; Helleboogh, A. Anticipatory vehicle routing using delegate multi-agent systems. In Proceedings of the 2007 IEEE Intelligent Transportation Systems Conference, Seattle, WA, USA, 30 September–3 October 2007; pp. 87–93. [Google Scholar]
- Adewara, K.A. An Evaluation of Open Source Geographic Information Systems Routing Tools in Vaccine Delivery in Kano State, Northern Nigeria. In Proceedings of the Free and Open Source Software for Geospatial (FOSS4G) Conference, Seoul, Korea, 14–19 September 2015; Volume 15. [Google Scholar] [CrossRef]
- Lovelace, R. Open source tools for geographic analysis in transport planning. J. Geogr. Syst. 2021, 23, 547–578. [Google Scholar] [CrossRef]
- Rauf, I.; Troubitsyna, E.; Porres, I. A systematic mapping study of API usability evaluation methods. Comp. Sci. Rev. 2019, 33, 49–68. [Google Scholar] [CrossRef]
- Jambu, M. Exploratory and Multivariate Data Analysis; Academic Press: Paris, France, 1991. [Google Scholar]
- Archetti, C.; Speranza, M.G. The Split Delivery Vehicle Routing Problem: A Survey. In The Vehicle Routing Problem: Latest Advances and New Challenges; Operations Research/Computer Science Interfaces 43; Golden, B., Raghavan, S., Wasil, E., Eds.; Springer: Boston, MA, USA, 2008. [Google Scholar]
- Zhang, Q.; Wei, L.R.; Hu, R.; Yan, R.; Li, L.H.; Zhu, X.N. A Review on the Bin Packing Capacitated Vehicle Routing Problem. Adv. Mater. Res. 2013, 853, 668–673. [Google Scholar] [CrossRef]
- Kritikos, M.N.; Ioannou, G. The heterogeneous fleet vehicle routing problem with overloads and time windows. Int. J. Prod. Econ. 2013, 144, 68–75. [Google Scholar] [CrossRef]
- Sitek, P.; Wikarek, J. Capacitated vehicle routing problem with pick-up and alternative delivery (CVRPPAD): Model and implementation using hybrid approach. Ann. Oper. Res. 2019, 273, 257–277. [Google Scholar] [CrossRef] [Green Version]
- Dijkstra, E.W. A note on two problems in connexion with graphs. Numer. Math. 1959, 1, 269–271. [Google Scholar] [CrossRef] [Green Version]
- Bruniecki, K.; Chybicki, A.; Moszyński, M.; Bonecki, M. Towards solving heterogeneous fleet vehicle routing problem with time windows and additional constraints: Real use case study. In Proceedings of the 2016 Federated Conference on Computer Science and Information Systems (FedCSIS), Gdansk, Poland, 11–14 September 2016. [Google Scholar]
- Panicker, V.V.; Mohammed, I.O. Solving a Heterogeneous Fleet Vehicle Routing Model—A practical approach. In Proceedings of the IEEE International Conference on System, Computation, Automation and Networking (ISCAN), Pondicherry, India, 6–7 July 2018; pp. 1–5. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, M.; Feng, Q.; Leng, L.; Zhao, Y. Data-Driven Robust Optimization for Solving the Heterogeneous Vehicle Routing Problem with Customer Demand Uncertainty. Complexity 2021, 2021, 6634132. [Google Scholar] [CrossRef]
- Ioannou, G.; Kritikos, M.; Prastacos, G. A Greedy Look-Ahead Heuristic for the Vehicle Routing Problem with Time Windows. J. Oper. Res. Soc. 2001, 52, 523–537. [Google Scholar] [CrossRef]
- Dondo, R.; Cerda, J. A cluster-based optimization approach for the multi-depot heterogeneous fleet vehicle routing problem with time windows. Eur. J. Oper. Res. 2007, 176, 1478–1507. [Google Scholar] [CrossRef]
- Mehrjerdi, Y.Z.; Nadizadeh, A. Using greedy clustering method to solve capacitated location-routing problem with fuzzy demands. Eur. J. Oper. Res. 2013, 229, 75–84. [Google Scholar] [CrossRef]
- Karner, T.; Weninger, B.; Schuster, B.; Fleck, S.; Kaminger, I. Improving Road Freight Transport Statistics by Using a Distance Matrix. Aust. J. Stat. 2017, 46, 65–80. [Google Scholar] [CrossRef]
- Zgonc, B.; Tekavčič, M.; Jakšič, M. The impact of distance on mode choice in freight transport. Eur. Trans. Res. Rev. 2019, 11, 10. [Google Scholar] [CrossRef]
- Kuehnel, N.; Ziemke, D.; Moeckel, R.; Nagel, K. The end of travel time matrices: Individual travel times in integrated land use/transport models. J. Trans. Geogr. 2020, 88, 1–12. [Google Scholar] [CrossRef]
- Henzinger, M.; Paz, A.; Schmid, S. On the Complexity of Weight-Dynamic Network Algorithms. In Proceedings of the IFIP Networking Conference, Espoo and Helsinki, Finland, 21–24 June 2021; pp. 1–9. [Google Scholar] [CrossRef]
- Gutenberg, M.P.; Wulff-Nilsen, C. Fully-Dynamic All-Pairs Shortest Paths: Improved Worst-Case Time and Space Bounds. arXiv 2020, arXiv:2001.10801. [Google Scholar]
- The Distance Matrix API for Transport Logistics and Freight. Available online: https://distancematrix.ai/logistics-solutions (accessed on 5 September 2021).
- TravelTime Distance Matrix API. Available online: https://traveltime.com/features/distance-matrix (accessed on 5 September 2021).
- Time-Distance Matrix and Three Ways to Use It. Available online: https://www.geoapify.com/time-distance-matrix-and-three-ways-to-use-it (accessed on 5 September 2021).
- Google Maps Platform. Available online: https://developers.google.com/maps/documentation/distance-matrix/overview (accessed on 5 September 2021).
- Open Routing Source Machine—Modern C++ Routing Engine for Shortest Paths in Road Networks. Available online: http://project-osrm.org/ (accessed on 5 September 2021).
- Akanbi, A.K.; Agunbiade, O.Y. Integration of a city GIS data with Google Map API and Google Earth API for a web based 3D Geospatial Application. arXiv 2013, arXiv:1312.0130. [Google Scholar]
- Favretto, A. API, Cloud computing, WebGIS and cartography. Netcom 2010, 24-3/4, 245–260. [Google Scholar] [CrossRef]
- Karagul, K.; Aydemir, E.; Tokat, S. Using 2-Opt based evolution strategy for travelling salesman problem. Int. J. Optim. Control Theor. Appl. 2016, 6, 103–113. [Google Scholar] [CrossRef] [Green Version]
- Facó, J.L.D. A Generalized Reduced Gradient Algorithm for Solving Large-Scale Discrete-Time Nonlinear Optimal Control Problems. IFAC Proc. Vol. 1989, 22, 45–50. [Google Scholar] [CrossRef]
- Cooper, J.C. The use of straight line distances in solutions to the vehicle scheduling problem. J. Oper. Res. Soc. 1983, 34, 419. [Google Scholar] [CrossRef]
- Kim, N.S.; Van Wee, B. The relative importance of factors that influence the break-even distance of intermodal freight transport systems. J. Transp. Geogr. 2011, 19, 859–875. [Google Scholar] [CrossRef]
- Barthélemy, M. Spatial networks. Phys. Rep. 2011, 499, 1–101. [Google Scholar] [CrossRef] [Green Version]
- Domínguez-Caamaño, P.; Benavides, J.A.C.; Prado, J.C.P. An improved methodology to determine the wiggle factor: An application for Spanish road transport. Braz. J. Oper. Prod. Manag. 2016, 1, 52. [Google Scholar] [CrossRef] [Green Version]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms: | DistEuclCorr | Mixed-Matrix (50% from Lowest) | Mixed-Matrix (50% from Highest) | DistOSRM |
|---|---|---|---|---|
| Greedy Only | −1.38% | 1.31% | −2.90% | 0.29% |
| Simple RS | 2.62% | 5.43% | 2.64% | 6.00% |
| Wise RS | 7.96% | 11.03% | 7.54% | 11.10% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Belka, R.; Godlewski, M. Vehicle Routing Optimization System with Smart Geopositioning Updates. Appl. Sci. 2021, 11, 10933. https://doi.org/10.3390/app112210933
Belka R, Godlewski M. Vehicle Routing Optimization System with Smart Geopositioning Updates. Applied Sciences. 2021; 11(22):10933. https://doi.org/10.3390/app112210933
Chicago/Turabian StyleBelka, Radosław, and Mateusz Godlewski. 2021. "Vehicle Routing Optimization System with Smart Geopositioning Updates" Applied Sciences 11, no. 22: 10933. https://doi.org/10.3390/app112210933
APA StyleBelka, R., & Godlewski, M. (2021). Vehicle Routing Optimization System with Smart Geopositioning Updates. Applied Sciences, 11(22), 10933. https://doi.org/10.3390/app112210933