
Method and Test Course for the Evaluation of Industrial Exoskeletons


Abstract
:1. Introduction
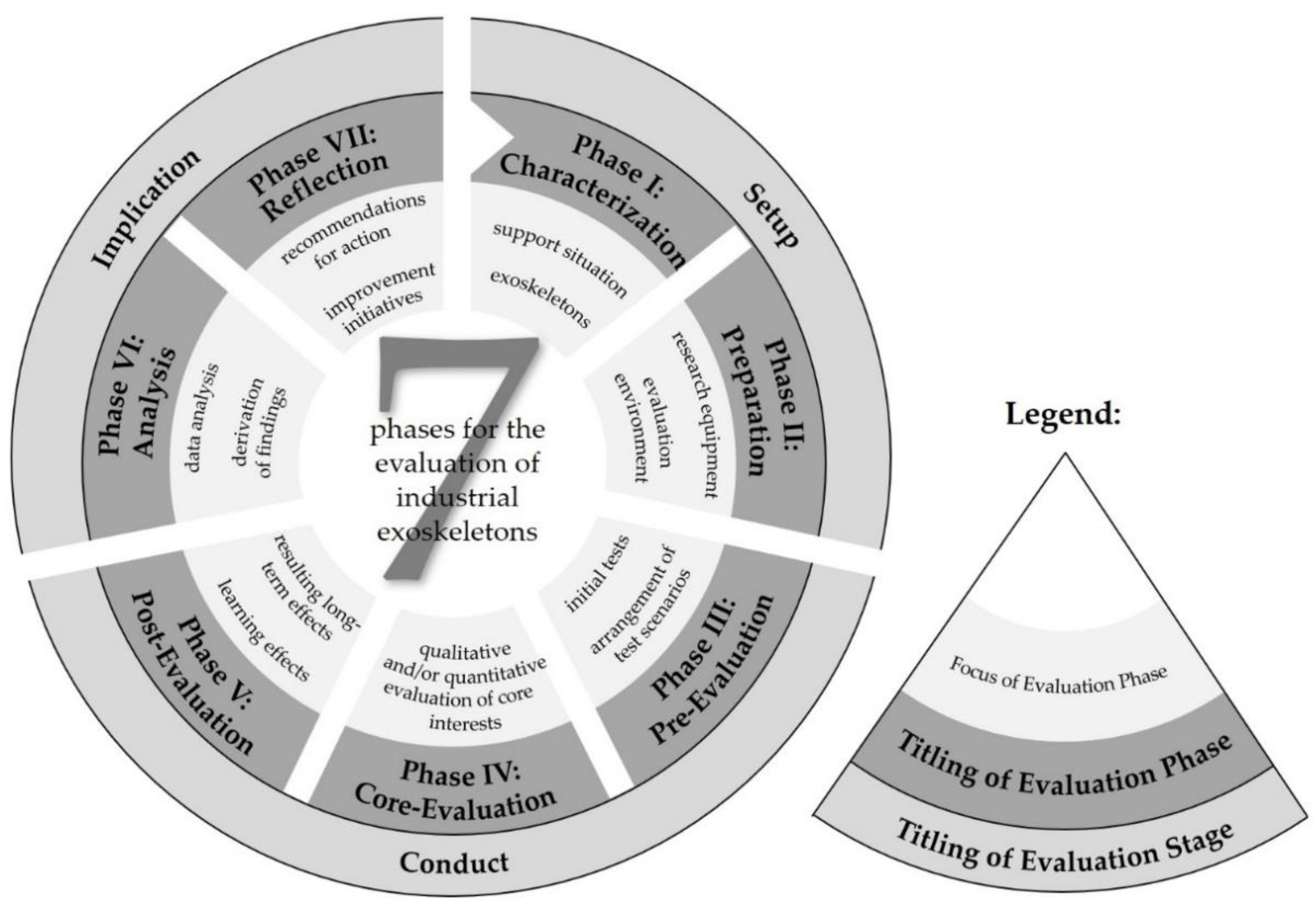
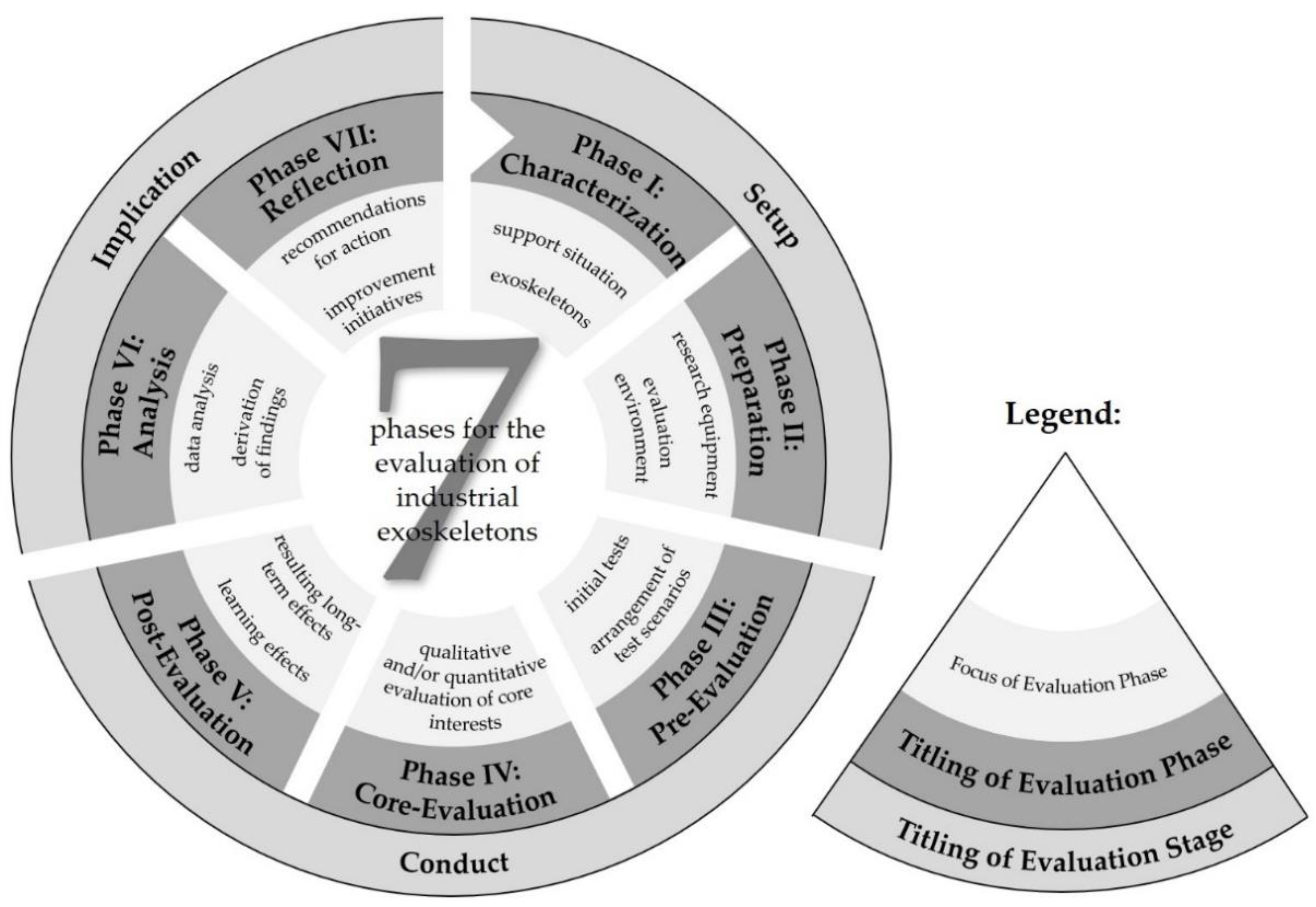
2. Method for the Evaluation of Industrial Exoskeletons
2.1. First Stage—Setup
2.1.1. Phase I—Characterization
2.1.2. Phase II—Preparation
2.2. Second Stage—Conduct
2.2.1. Phase III—Pre-Evaluation
2.2.2. Phase IV—Core-Evaluation
2.2.3. Phase V—Post-Evaluation
2.3. Third Stage—Implication
2.3.1. Phase VI—Analysis
2.3.2. Phase VII—Reflection
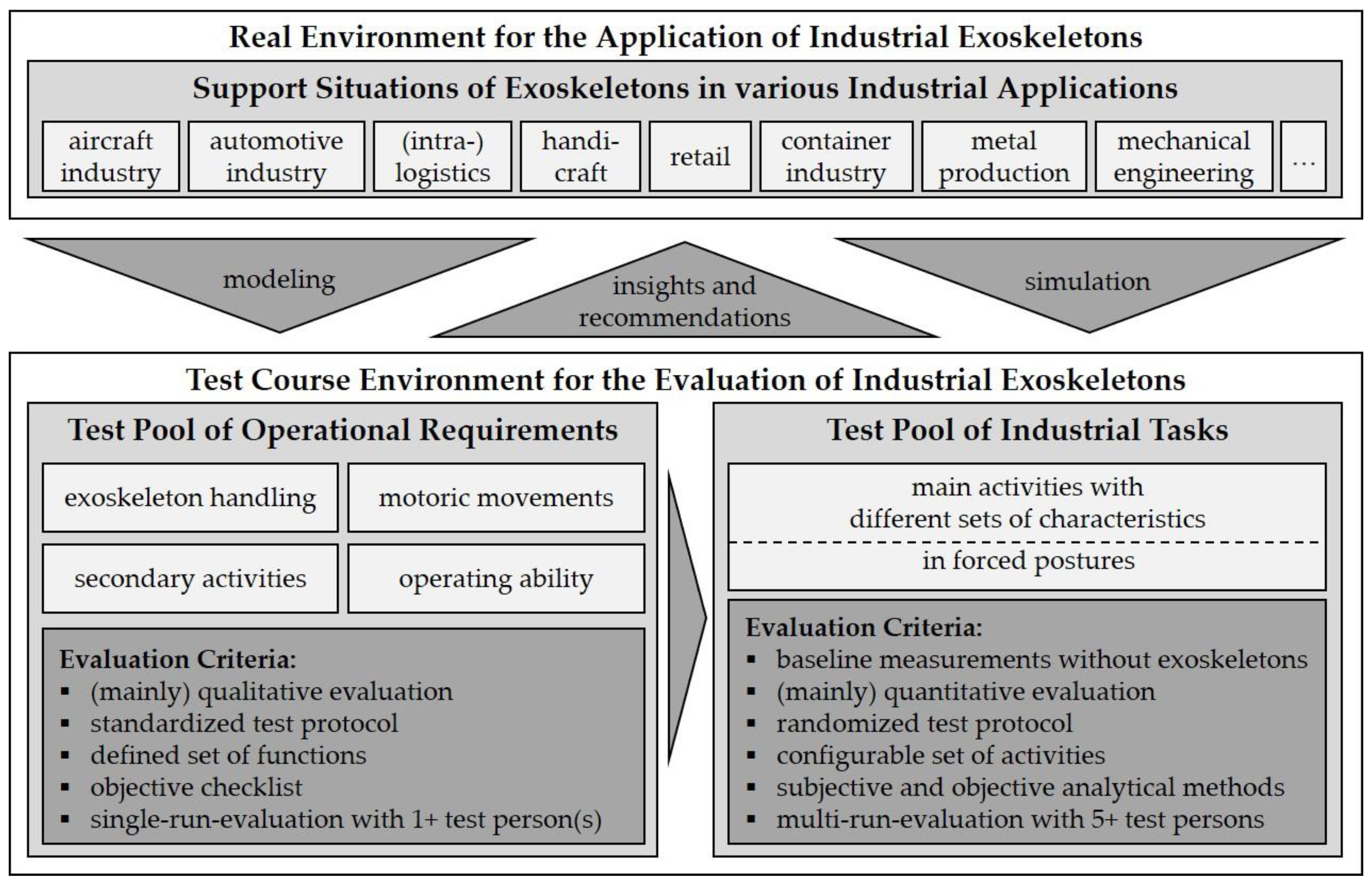
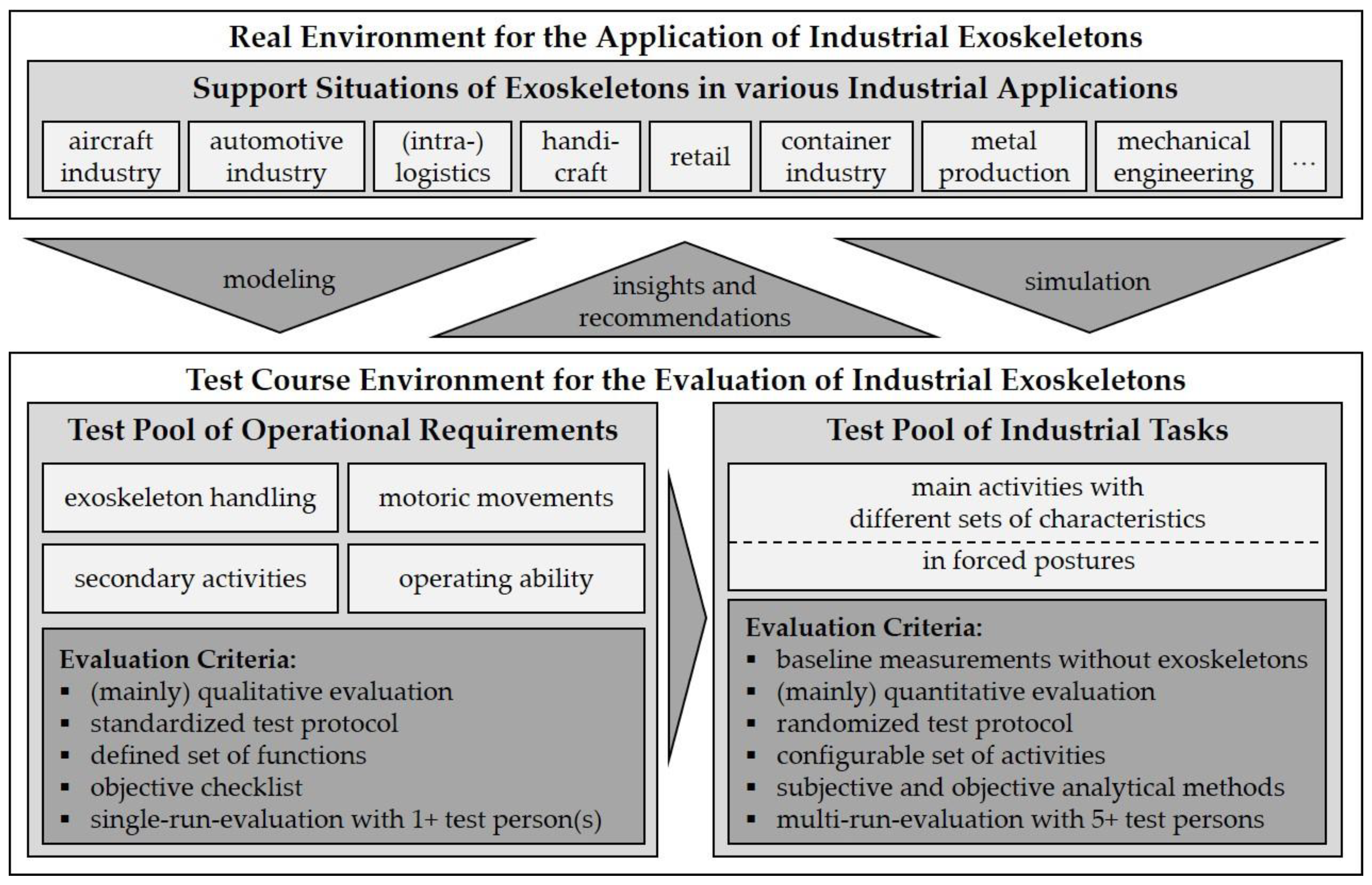
3. Test Course for the Evaluation of Exoskeletons
3.1. Conceptual Framework for the Setup of the Test Course
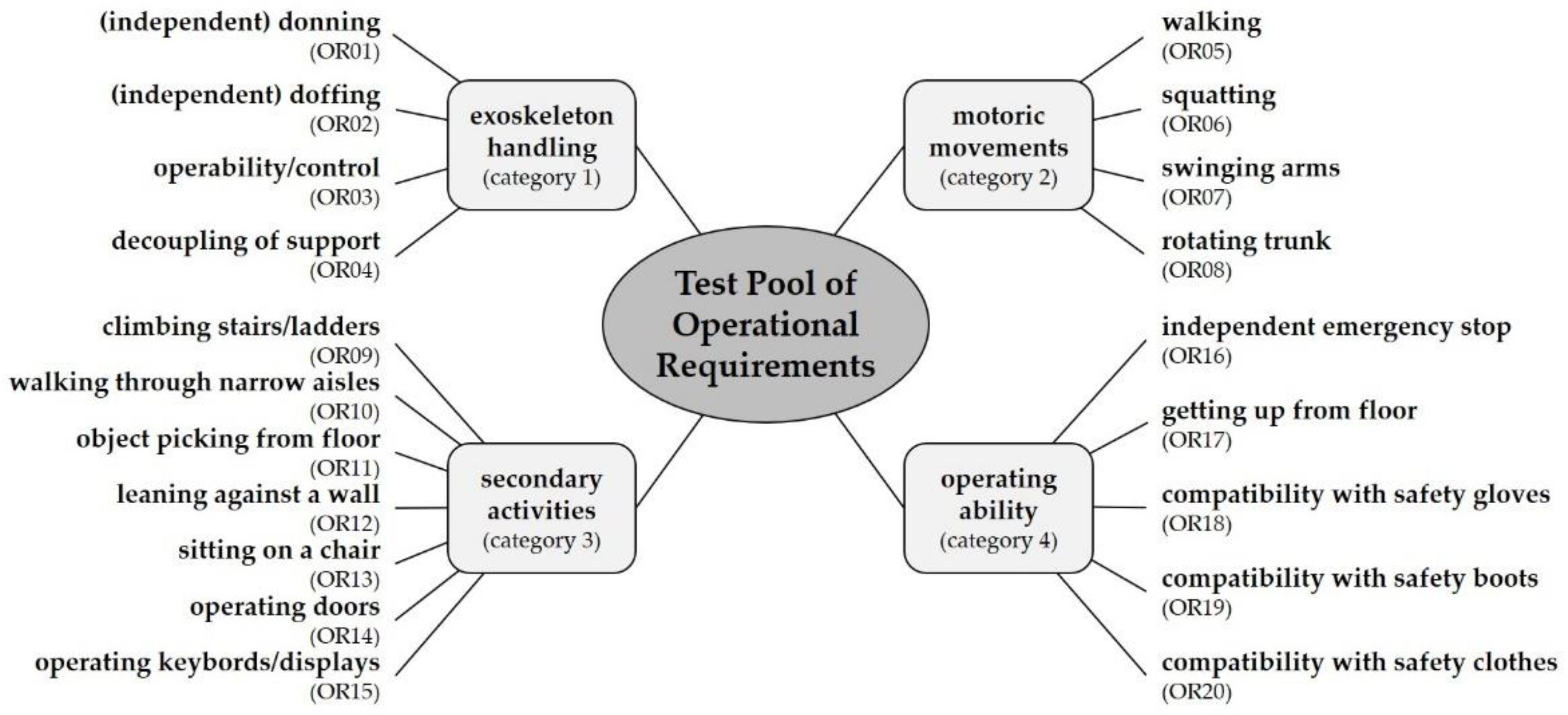
3.2. Evaluation of Operational Requirements
- -
- (Independent) Donning (OR01): System users need to don the exoskeleton. The duration and the possibility of independently donning the system are evaluated as these aspects influence workplace organizations.
- -
- (Independent) Doffing (OR02): System users need to doff the exoskeleton. Equivalent to the donning of the system, the duration and the possibility of independently doffing the system are of primary interest as these aspects influence workplace organizations and safety aspects.
- -
- Operability/Control (OR03): System users can operate the exoskeleton on their own. If system-sided possible, different support modes need to be easily adjustable to and applicable for the user, as these aspects influence the usability and time for familiarization.
- -
- Decoupling of support (OR04): Certain body postures in specific working tasks (e.g., hip flexion while walking underneath a lowered ceiling, shoulder abduction while lifting a box from the ground) might technically induce exoskeletal support, which disturbs the system user more than it helps. Thus, it might be necessary to decouple or block the system’s support in working situations.
- -
- Walking (OR05): System users can walk long distances while wearing the exoskeleton, as walking is an integral part of work profiles in industrial work.
- -
- Squatting (OR06): System users can squat while wearing the exoskeleton, as bending over and general mobility is highly affordable in industrial application scenarios of exoskeletons.
- -
- Swinging arms (OR07): As most industrial activities require using hands and arms to perform tasks, system users can flexibly swing their arms in a horizontal and vertical rotation around body axes. For instance, elementary movements of the shoulder need to remain possible (e.g., extension/flexion and abduction/adduction).
- -
- Rotating the trunk (OR08): System users can rotate their trunk and flexibly perform upper body movements even when wearing an exoskeleton.
- -
- Climbing stairs/ladders (OR09): Mobility while wearing the exoskeleton needs to be guaranteed, even during the use of climbing aids such as stairs or ladders.
- -
- Walking through narrow aisles (OR10): The maneuverability of an exoskeleton in narrow aisles (e.g., between two shelves) is crucial since it determines the user’s agility and a possible risk of getting stuck.
- -
- Picking up an object from the floor (OR11): As any object (e.g., tool, workpiece, pencil) can accidentally fall to the ground, the user should maintain the flexibility to grasp it again—even with an exoskeleton. A range of motion such as this also enables the user to bind open shoelaces.
- -
- Leaning against a wall (OR12): Due to the external body structure of an exoskeleton, the operability of work equipment such as forklift trucks needs to remain possible while wearing an exoskeleton.
- -
- Sitting on a chair (OR13): System users occasionally need to sit on a chair to rest, perform working tasks, or operate equipment. This function is also an addition to the operability check in OR10.
- -
- Operating doors (OR14): While wearing the exoskeleton, system users must remain capable of opening and closing doors for moving between rooms and in case of emergency.
- -
- Operating keyboards/displays (OR15): The ongoing digitalization in the industry leads to digital data processing with keyboards with more (touch) displays, so that a user of a (hand) exoskeleton should still be able to operate them. Typical hand-held devices are scanners, (mobile) phones, or other control panels of machines and devices.
- -
- Independent emergency stops (OR16): Although system manufacturers must guarantee the function, system users should test their ability to stop the exoskeleton independently and immediately in the possible case of an emergency.
- -
- Getting up from the floor (OR17): After falling to the ground, system users must be able to get up from the floor independently.
- -
- Compatibility with safety gloves (OR18): If safety gloves are compulsory for the workplace, system users must be capable of wearing them while performing the task. Besides, appropriate operation of the exoskeleton with gloves is to be ensured.
- -
- Compatibility with safety boots (OR19): Since some exoskeletons extend their path of force to feet or ankles, compatibility with (ankle-high) safety shoes can become relevant.
- -
- Compatibility with safety clothes (OR20): Independently from the external structure on the body, system users need to remain capable of wearing safety clothes (e.g., a safety vest). Additionally, the exoskeleton must neither hamper the visibility of the safety vest nor the movability of kinematic elements of the exoskeleton or of the system user itself.
3.3. Evaluation of Industrial Tasks
- -
- Overhead torquing (IT01): This test task focuses on the static or dynamic performance of activities above head level, where, e.g., activities require the use of additional tools. The task is performed dynamically if the arm is cyclically lowered vertically after each torquing and moved upwards again. If the arm remains in the same posture or only adjustably moves, the task is considered static. The torquing can be specified as, e.g., drilling or screwing. A possible modification is to perform the task in front of the body.
- -
- Grinding walls (IT02): The characteristic of this task is using a long-range tool with a higher dead weight, requiring a two-handed operation. The application focuses on large-scale, rotational, dynamic movements in vertical or horizontal directions.
- -
- Hanging objects (IT03): This task assesses dynamically hanging items in variable height ranges with pinpoint accuracy on defined fixtures. A possible modification is the hooking of objects at undefined spots. Depending on the design of the task, it allows testing varying levels of precision.
- -
- Clamping pipes (IT04): In this task, items are clamped in defined fixtures of different heights. The objects can have different shapes in terms of length, form, material, and weight. The tasks can be performed above head level or in front of the body.
- -
- Setting bolts (IT05): This static task tests fine motor skills and concentration. Objects such as bolts, nails, or screws must be precisely placed at predefined spots.
- -
- Relocating boxes (IT06): In this task, various objects with different properties (e.g., size, weight, shape) are moved horizontally in a static, bent-forward posture. Only a low stroke is required to lift the objects.
- -
- Sorting boxes (IT07): This dynamic task aims at the targeted sorting of objects at different heights. This activity requires a combined horizontal, vertical, and rotational sequence of movements. A typical application is the storage of boxes on a shelf.
- -
- Carrying boxes (IT08): This task involves first lifting an object, then carrying it over a distance, and finally placing it back in a fixed location. The core is dynamic movements in a horizontal dimension, carrying a varying weight in front of the body with bent arms.
- -
- Operating a material trolley (IT09): This dynamic task checks for possible limitations in operating assistive devices, such as material carts, mobile tool containers, or industrial trucks. The object is either pushed in front of or pulled behind the body.
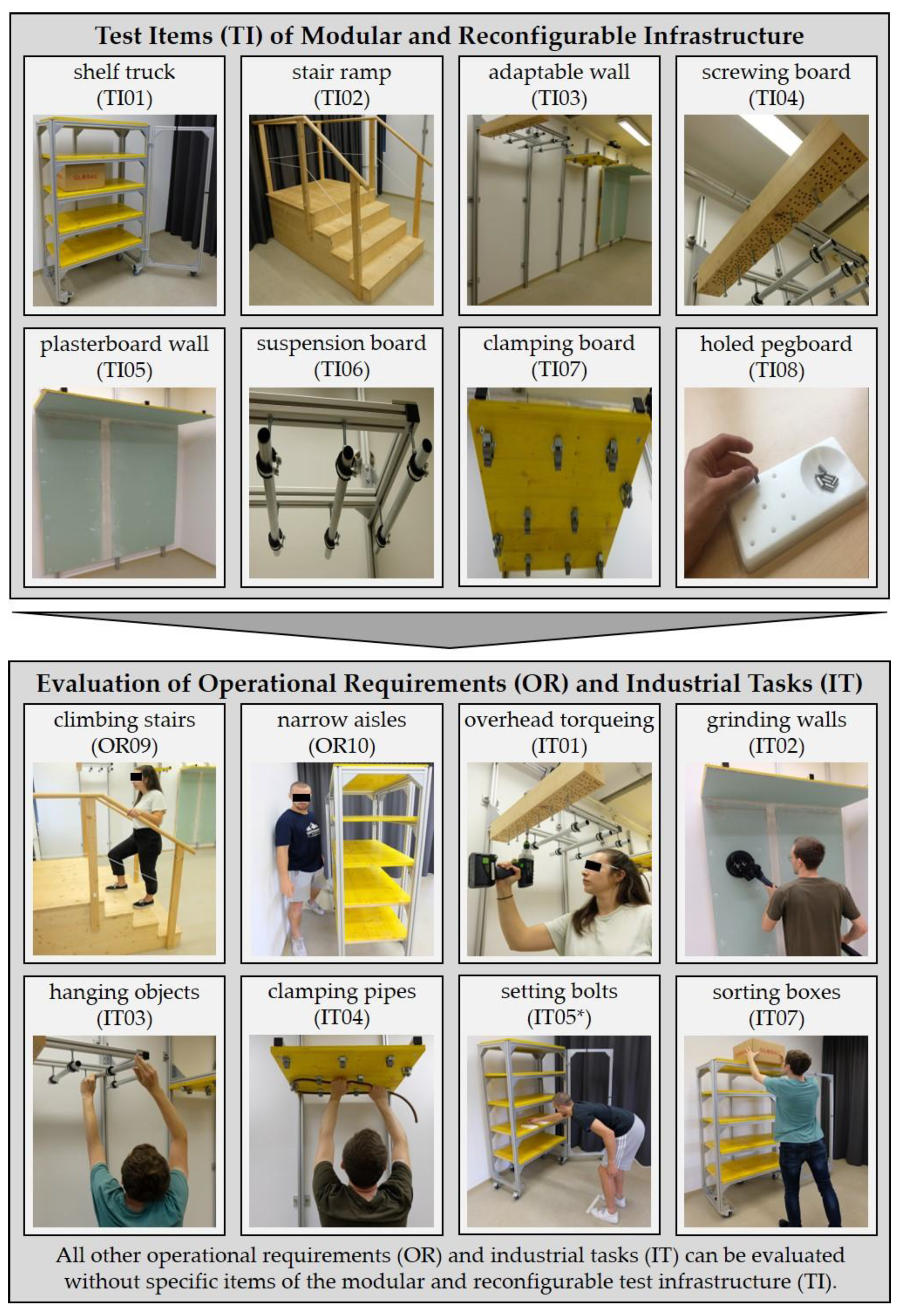
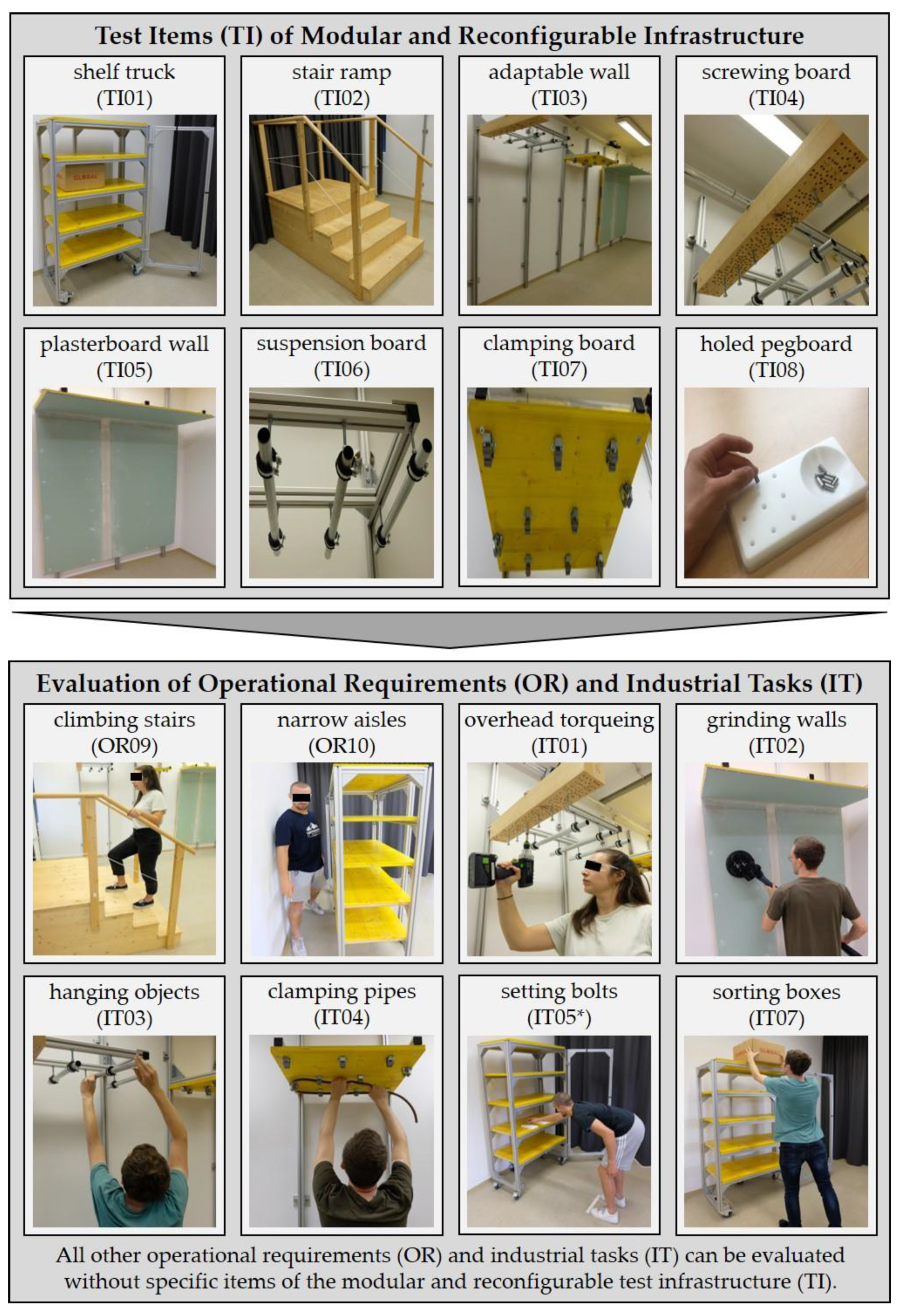
3.4. Practical Realization of an Exemplary Modular and Reconfigurable Test Infrastructure
- -
- Shelf truck (TI01): The movable truck serves as a shelving system, as the number and height of the shelves are easily adjustable. Placed near a wall, it can also simulate narrow aisles. The two angle pieces are foldable and fixable to stabilize the truck and prevent falling during loading tasks. Besides, the feature helps extend the long side for simulating longer aisles. Thus, it especially enables the evaluation of OR10, IT06, IT07, IT08, and ITXX*. Besides, it can also function as a backbone for the attachment of different working boards (TI04 to TI08).
- -
- Stair ramp (TI02): The stair ramp includes steps, a handrail, and a fenced plateau. An inner hollow reduces the total weight and helps the ramp remain easily movable. The plateau can be used as the reversal point or for simulating narrow working places, and the stairs to model tasks in forced postures (e.g., in a stooped posture, below floor level). Accordingly, the ramp enables the evaluation of exoskeletons regarding, e.g., OR09, IT05, IT06, and ITXX*.
- -
- Adaptable wall (TI03): The wall comprises several horizontal profiles for the placement and individual height adaption of different horizontal or vertical working boards (TI04 to TI08). The item provides a necessary basis for possible evaluations of, e.g., the tasks IT01, IT02, IT03, IT04, IT05, and ITXX*, and especially of activities performed above head level.
- -
- Screwing board (TI04): Depending on the working tool, the screwing board lays the foundation for two ways of evaluating IT01. First, pre-fixed screws can be torqued in a bar with a nut runner (single-handed). Second, several screws can be directly screwed (in a predefined way) with an electric screwdriver (both-handed).
- -
- Plasterboard wall (TI05): Several connected plasterboards allow simulating different working tasks on walls or the ceiling, e.g., grinding, cleaning, mounting, or painting tasks. Accordingly, coarse requirements of, e.g., task IT02 can be covered. After each test person, the initial situation can be restored since plasterboards can easily be repaired with priming material or replaced.
- -
- Suspension device (TI06): The suspension device uses pipe clamps tightened with a screwable strap. It fixes cylindrical, elongated tubes by being clamped into the corresponding holder. Due to its design, the item enables any possible variant of hanging objects (IT03).
- -
- Clamping board (TI07): The clamping board consists of object clamps with a snapping function when pressing the object (e.g., tube) inside. The clamping board has specifically been designed for task IT04.
- -
- Holed pegboard (TI08): The pegboard comprises drilled holes, cylindric pins (with a smaller diameter to precisely fit into the drilled holes), and a collecting pan. Due to installed permanent solenoids, the bolts also stick to the pegboard in vertical or upside-down orientations. Besides, the pegboard is easily mountable to the adaptable wall or working boards. The holed pegboard sets a necessary basis for task IT05.
4. Results
4.1. Suitability of the Test Course
4.1.1. Representativity
- -
- Due to the diverse mix of the exemplary tasks in terms of dynamics, granularity, and handedness, the test course is capable of mapping different application scenarios. Despite the aggregation of vast industrial application scenarios to nine characteristic tasks, several industrial application scenarios are evaluable due to the possibility of minor adjustments and parameter variations within the activities.
- -
- Characteristic activities from industrial operations are replicable and transformable to the adaptable framework of the modular test course, respectively. Thus, the test course can lay a foundation to evaluate the fundamental suitability and effectiveness of using exoskeleton types.
- -
- The derived results in the test course for certain exoskeletons are similar and in line with insights, observations, and feedback perceived during previous field tests with the same exoskeletons. Thus, the practical applicability and comparability of the test course for laboratory trials can be approved.
- -
- Not all exoskeletons passing the test course met the requirements to the same extent. Depending on the morphology and properties of the respective exoskeleton, each system shows the operational requirements and performances in different working contexts to a varying degree. Accordingly, the test course does not always lead to the same result but indicates different results and supportive effects for exoskeletons.
4.1.2. Applicability
- -
- The framework of the test course with a pool of considerable operational requirements and industrial tasks acts like a baseline to ease the comparison of different studies and a first step towards harmonizing and standardizing evaluations with several industrial exoskeletons.
- -
- The modular and reconfigurable test infrastructure is capable of realizing various test setups but keeps the amount of equipment to a manageable level. By the modular approach, the test course is suitable for evaluating different types of exoskeletons with regard to their requirements and usability for movement tasks (e.g., sitting down, picking up objects, walking in narrow aisles) and application contexts (e.g., personal protective equipment).
4.2. Applicability and Effectiveness of Exoskeleton Types
4.2.1. Mode of Actuation
- -
- In comparison to passive exoskeletons, active systems are more suitable for use in particular tasks with dynamic movement sequences and high variance due to the versatile adaptation of the support performance and its basic possibility, as the application of exoskeletons mainly in IT01, IT02, IT07, and IT08 shows.
- -
- Passive systems are mainly suitable for static holding and stabilization tasks with only minor variations (e.g., IT04 and IT05). Due to the passive drive (e.g., spring), the energy for force support must first be actively supplied to the system by the user. Accordingly, passive systems have proven to be especially suitable for activities without required load changes.
- -
- Both types often offer a possibility to deactivate the force support, whereby active systems can automatically switch off the support for selected movements (e.g., OR03, OR16). On the other hand, passive systems usually have to be manually unlocked, though not all exoskeletons possess this option (e.g., OR04, OR16).
4.2.2. Morphological Structure
- -
- Soft systems, so-called exosuits, are characterized by materials fitting close to the body. Thus, these systems are particularly suitable for working contexts requiring the (invisible) provision of a high level of wearer comfort (e.g., in narrow aisles (ITXX*) or underneath personal protective equipment (OR10)). Correspondingly, exosuits mainly provide support for holding and stabilization tasks (e.g., IT05, IT06). However, the level of support is generally limited to a low level.
- -
- Rigid exoskeletons offer a higher potential for force support than soft systems, but usually require a larger operation space (e.g., IT01, IT02, ITXX*). Thus, the adaptability with working or personal protective equipment can potentially be restricted (e.g., OR10).
4.2.3. Effectiveness
- -
- As the evaluation of all operational requirements assigned to the secondary activities (OR09 to OR15) as well as industrial tasks (IT01 to IT09) proves, exoskeletons are differently suited to support system users performing main and secondary activities (e.g., OR11, OR13) or to continue to operate working aids such as industrial trucks (e.g., IT09).
- -
- As the test course application of operational requirements and industrial tasks confirms, exoskeletons are primarily designed for one use case and to support the system user in one specific application, correspondingly. Secondary activities are often limited, e.g., the arms are still pushed up when bending forward in passive shoulder exoskeletons. If designed correctly, active systems with situation recognition have more far-reaching possibilities for adapting their support without hindering secondary activities.
- -
- Even though exoskeletons are capable of supporting system users by their functionality, the morphological structure or operating principle can potentially restrict the suitability (e.g., inertial active exoskeletons following or performing dynamic movements) of exoskeletons, as high-dynamic movements might be hindered (e.g., OR08, OR12, IT06, IT07).
5. Discussion
5.1. Seven-Phase Model
5.2. Test Course
5.3. Limitations
5.4. Future Work
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bogue, R. Exoskeletons—A Review of Industrial Applications. Ind. Robot Int. J. 2018, 45, 585–590. [Google Scholar] [CrossRef]
- Fox, S.; Aranko, O.; Heilala, J.; Vahala, P. Exoskeletons: Comprehensive, Comparative and Critical Manufacturing Performance. J. Manuf. Technol. Manag. 2019, 31. [Google Scholar] [CrossRef] [Green Version]
- Eurofound. Sixth European Working Conditions Survey—Overview Report (2017 Update); Publications Office of the European Union: Luxembourg, 2017. [Google Scholar] [CrossRef]
- Weidner, R.; Linnenberg, C.; Hoffmann, N.; Prokop, G.; Edwards, V. Exoskelette Für Den Industriellen Kontext: Systematisches Review Und Klassifikation. In Proceedings of the 66 Kongress der Gesellschaft für Arbeitswissenschaften, Berlin, Germany, 16–18 March 2020. [Google Scholar]
- Weidner, R.; Karafillidis, A. Distinguishing Support Technologies. A General Scheme and Its Application to Exoskeletons. In Developing Support Technologies. Biosystems and Biorobotics; Weidner, R., Karafillidis, A., Eds.; Springer: Cham, Switzerland, 2018; pp. 85–100. [Google Scholar] [CrossRef]
- Hoffmann, N.; Ralfs, L.; Weidner, R. Leitmerkmale und Vorgehen einer Implementierung von Exoskeletten. Z. Wirtsch. Fabr. 2021, 116, 525–528. [Google Scholar] [CrossRef]
- Ralfs, L.; Hoffmann, N.; Weidner, R. Approach of a Decision Support Matrix for the Implementation of Exoskeletons in Industrial Workplaces. In Annals of Scientific Society for Assembly, Handling and Industrial Robotics; Schüppstuhl, T., Tracht, K., Raatz, A., Eds.; Springer: Cham, Switzerland, 2022. [Google Scholar] [CrossRef]
- Hoffmann, N.; Argubi-Wollesen, A.; Linnenberg, C.; Weidner, R. Towards a Framework for Evaluating Exoskeletons. In Production at the Leading Edge of Technology; Wulfsberg, J.P., Hintze, W., Behrens, B.A., Eds.; Springer: Berlin/Heidelberg, Germany, 2019; pp. 441–450. [Google Scholar] [CrossRef]
- Glitsch, U. Analyse der Wirksamkeit von Exoskeletten. Aus Arbeit IFA 2019, 1, 1–2. [Google Scholar]
- Nabeshima, C.; Ayusawa, K.; Hochberg, C.; Yoshida, E. Standard Performance Test of Wearable Robots for Lumbar Support. IEEE Robot. Autom. Lett. 2018, 3, 2182–2189. [Google Scholar] [CrossRef]
- Hoffmann, N.; Prokop, G.; Weidner, R. Methodologies for Evaluating Exoskeletons with Industrial Applications. Ergonomics 2021, 1–38. [Google Scholar] [CrossRef] [PubMed]
- Alabdulkarim, S.; Nussbaum, M.A. Influences of Different Exoskeleton Designs and Tool Mass on Physical Demands and Performance in a Simulated Overhead Drilling Task. Appl. Ergon. 2019, 74, 55–66. [Google Scholar] [CrossRef]
- Hensel, R.; Keil, M. Subjective Evaluation of a Passive Industrial Exoskeleton for Lower-Back Support: A Field Study in the Automotive Sector. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 213–221. [Google Scholar] [CrossRef]
- Maurice, P.; Camernik, J.; Gorjan, D.; Schirrmeister, B.; Bornmann, J.; Tagliapietra, L.; Latella, C.; Pucci, D.; Fritzsche, L.; Ivaldi, S.; et al. Objective and Subjective Effects of a Passive Exoskeleton on Overhead Work. IEEE Trans. Neural Syst. Rehabil. Eng. 2020, 28, 152–164. [Google Scholar] [CrossRef] [Green Version]
- Pacifico, I.; Molteni, F.; Giovacchini, F.; Vitiello, N.; Crea, S.; Scano, A.; Guanziroli, E.; Moise, M.; Morelli, L.; Chiavenna, A.; et al. An Experimental Evaluation of the Proto-Mate: A Novel Ergonomic Upper-Limb Exoskeleton to Reduce Workers’ Physical Strain. IEEE Robot. Autom. Mag. 2020, 27, 54–65. [Google Scholar] [CrossRef]
- Luger, T.; Baer, M.; Seibt, R.; Rieger, M.A.; Steinhilber, B. Using a Back Exoskeleton During Industrial and Functional Tasks—Effects on Muscle Activity, Posture, Performance, Usability, and Wearer Discomfort in a Laboratory Trial. Hum. Factors J. Hum. Factors Ergon. Soc. 2021. [Google Scholar] [CrossRef]
- Theurel, J.; Desbrosses, K. Overview of Their Benefits and Limitations in Preventing Work-Related Musculoskeletal Disorders. IISE Trans. Occup. Ergon. Hum. Factors 2019, 7, 264–280. [Google Scholar] [CrossRef]
- ASTM International. Committee F48 on Exoskeletons and Exosuits. Available online: https://www.astm.org/COMMITTEE/F48.htm (accessed on 9 April 2021).
- European Committee for Standardization. Lower-Limb Wearable Devices—Performance Test Method for Walking on Uneven Terrain; CEN: Brussels, Belgium, 2021. [Google Scholar]
- Torricelli, D.; Pons, J.L. EUROBENCH: Preparing Robots for the Real World. In Wearable Robotics: Challenges and Trends; WeRob 2018. Biosystems & Biorobotics; Carrozza, M., Micera, S., Pons, J.L., Eds.; Springer: Cham, Switzerland, 2018; pp. 375–378. [Google Scholar] [CrossRef]
- Del Ferraro, S.; Falcone, T.; Ranavolo, A.; Molinaro, V. The Effects of Upper-Body Exoskeletons on Human Metabolic Cost and Thermal Response during Work Tasks—A Systematic Review. Int. J. Environ. Res. Public Health 2020, 17, 7374. [Google Scholar] [CrossRef]
- De Looze, M.P.; Bosch, T.; Krause, F.; Stadler, K.S.; O’Sullivan, L.W. Exoskeletons for Industrial Application and Their Potential Effects on Physical Work Load. Ergonomics 2016, 59, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Kermavnar, T.; De Vries, A.W.; De Looze, M.P.; Leonard, W.; Sullivan, O.; Kermavnar, T.; De Vries, A.W.; De Looze, M.P.; Leonard, W. Effects of Industrial Back-Support Exoskeletons on Body Loading and User Experience: An Updated Systematic Review. Ergonomics 2021, 64, 685–711. [Google Scholar] [CrossRef]
- Baer, M.; Steinhilber, B.; Rieger, M.A.; Luger, T. The Influence of Using Exoskeletons during Occupational Tasks on Acute Physical Stress and Strain Compared to No Exoskeleton—A Systematic Review and Meta-Analysis. Appl. Ergon. 2021, 94, 103385. [Google Scholar] [CrossRef]
- Hefferle, M.; Lechner, M.; Kluth, K.; Christian, M. Development of a Standardized Ergonomic Assessment Methodology for Exoskeletons Using Both Subjective and Objective Measurement Techniques. Adv. Intell. Syst. Comput. 2020, 962, 49–59. [Google Scholar] [CrossRef]
- Bostelman, R.; Li-Baboud, Y.S.; Virts, A.; Yoon, S.; Shah, M. Towards Standard Exoskeleton Test Methods for Load Handling. In Proceedings of the 2019 Wearable Robotics Association Conference WearRAcon, Scottsdale, AZ, USA, 26–28 March 2019. [Google Scholar] [CrossRef]
- Taborri, J.; Salvatori, S.; Mariani, G.; Rossi, S.; Patane, F. BEAT: Balance Evaluation Automated Testbed for the standardization of balance assessment in human wearing exoskeletons. In Proceedings of the IEEE International Workshop on Metrology for Industry & IoT, Roma, Italy, 3–5 June 2020. [Google Scholar] [CrossRef]
- Baltrusch, S.J.; van Dieën, J.H.; van Bennekom, C.A.M.; Houdijk, H. The Effect of a Passive Trunk Exoskeleton on Functional Performance in Healthy Individuals. Appl. Ergon. 2018, 72, 94–106. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kozinc, Ž.; Baltrusch, S.; Houdijk, H.; Šarabon, N. Reliability of a Battery of Tests for Functional Evaluation of Trunk Exoskeletons. Appl. Ergon. 2020, 86, 103117. [Google Scholar] [CrossRef]
- Torricelli, D.; Mizanoor, R.S.M.; Lippi, V.; Weckx, M.; Mathijssen, G.; Vanderborght, B.; Mergner, T.; Lefeber, D.; Pons, J.L. Benchmarking Human Likeness of Bipedal Robot Locomotion: State of the Art and Future Trends. In Metrics of Sensory Motor Coordination and Integration in Robots and Animals; Bonsignorio, F., Messina, E., del Pobil, A., Hallam, J., Eds.; Springer: Cham, Switzerland, 2020; pp. 147–166. [Google Scholar] [CrossRef]
- Fraunhofer IPA. Exoworkathlon. Available online: https://www.wearablerobotics.com/wearracon-europe-21/exoworkathalon/ (accessed on 16 September 2021).
- ETH Zürich. Race Description Cybathlon 2020 Global Edition. Available online: https://cybathlon.ethz.ch/documents/downloads/CYBATHLON_global_edition_Races_and_Rules.pdf (accessed on 16 September 2021).
- Weidner, R.; Kong, N.; Wulfsberg, J.P. Human Hybrid Robot: A New Concept for Supporting Manual Assembly Tasks. Prod. Eng. 2013, 7, 675–684. [Google Scholar] [CrossRef]
- Schroeter, F.; Kaehler, S.T.; Yao, Z.; Jacobsen, T.; Weidner, R. Cognitive Effects of Physical Support Systems: A Study of Resulting Effects for Tasks at and above Head Level Using Exoskeletons. In Annals of Scientific Society for Assembly, Handling and Industrial Robotics; Schüppstuhl, T., Tracht, K., Henrich, D., Eds.; Springer: Berlin/Heidelberg, Germany, 2020; pp. 149–159. [Google Scholar] [CrossRef]
- Wang, X.; Song, Q.; Wang, X.; Liu, P. Kinematics and Dynamics Analysis of a 3-DOF Upper-Limb Exoskeleton with an Internally Rotated Elbow Joint. Appl. Sci. 2018, 8, 464. [Google Scholar] [CrossRef] [Green Version]
- Madinei, S.; Alemi, M.M.; Kim, S.; Srinivasan, D.; Nussbaum, M.A. Biomechanical Evaluation of Passive Back-Support Exoskeletons in a Precision Manual Assembly Task: “Expected” Effects on Trunk Muscle Activity, Perceived Exertion, and Task Performance. Hum. Factors 2020, 62, 441–457. [Google Scholar] [CrossRef] [PubMed]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Characteristics | Task Description | Variation Parameters | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Dynamics (s, d) | Granularity (c, f) | Handedness (1, 2) | ID | Exemplary Task | Work Height | Spatial Orientation | Object Size/Weight | Electric Tool Use | Processing Sequence | Distance/Range | Number of Objects |
| s, d | f | 1, 2 | IT01 | Overhead torquing | X | X | X | X | |||
| d | c | 2 | IT02 | Grinding walls | X | X | X | X | |||
| s, d | c, f | 1, 2 | IT03 | Hanging objects | X | X | X | X | |||
| s, d | c, f | 1, 2 | IT04 | Clamping pipes | X | X | X | X | |||
| s | f | 1, 2 | IT05 | Setting bolts | X | X | X | X | X | ||
| s | f | 2 | IT06 | Relocating boxes | X | X | X | X | X | ||
| d | c, f | 2 | IT07 | Sorting boxes | X | X | X | X | |||
| d | c | 2 | IT08 | Carrying boxes | X | X | X | X | |||
| d | c | 1, 2 | IT09 | Operating a material trolley | X | X | X | ||||
| ITXX* | Tasks in forced postures | ||||||||||
| Mode of Actuation | Body Region | Total | ||
|---|---|---|---|---|
| Shoulder | Back | Hand | ||
| Active Exoskeleton | 1 | 1 | 1 | 3 |
| Passive Exoskeleton | 2 | 3 | - | 5 |
| Total | 3 | 4 | 1 | 8 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ralfs, L.; Hoffmann, N.; Weidner, R. Method and Test Course for the Evaluation of Industrial Exoskeletons. Appl. Sci. 2021, 11, 9614. https://doi.org/10.3390/app11209614
Ralfs L, Hoffmann N, Weidner R. Method and Test Course for the Evaluation of Industrial Exoskeletons. Applied Sciences. 2021; 11(20):9614. https://doi.org/10.3390/app11209614
Chicago/Turabian StyleRalfs, Lennart, Niclas Hoffmann, and Robert Weidner. 2021. "Method and Test Course for the Evaluation of Industrial Exoskeletons" Applied Sciences 11, no. 20: 9614. https://doi.org/10.3390/app11209614
APA StyleRalfs, L., Hoffmann, N., & Weidner, R. (2021). Method and Test Course for the Evaluation of Industrial Exoskeletons. Applied Sciences, 11(20), 9614. https://doi.org/10.3390/app11209614