
Design of and Experiment on a Film Removal Device of an Arc-Toothed Residual Film Recovery Machine before Sowing


Abstract
:1. Introduction
2. Materials and Methods
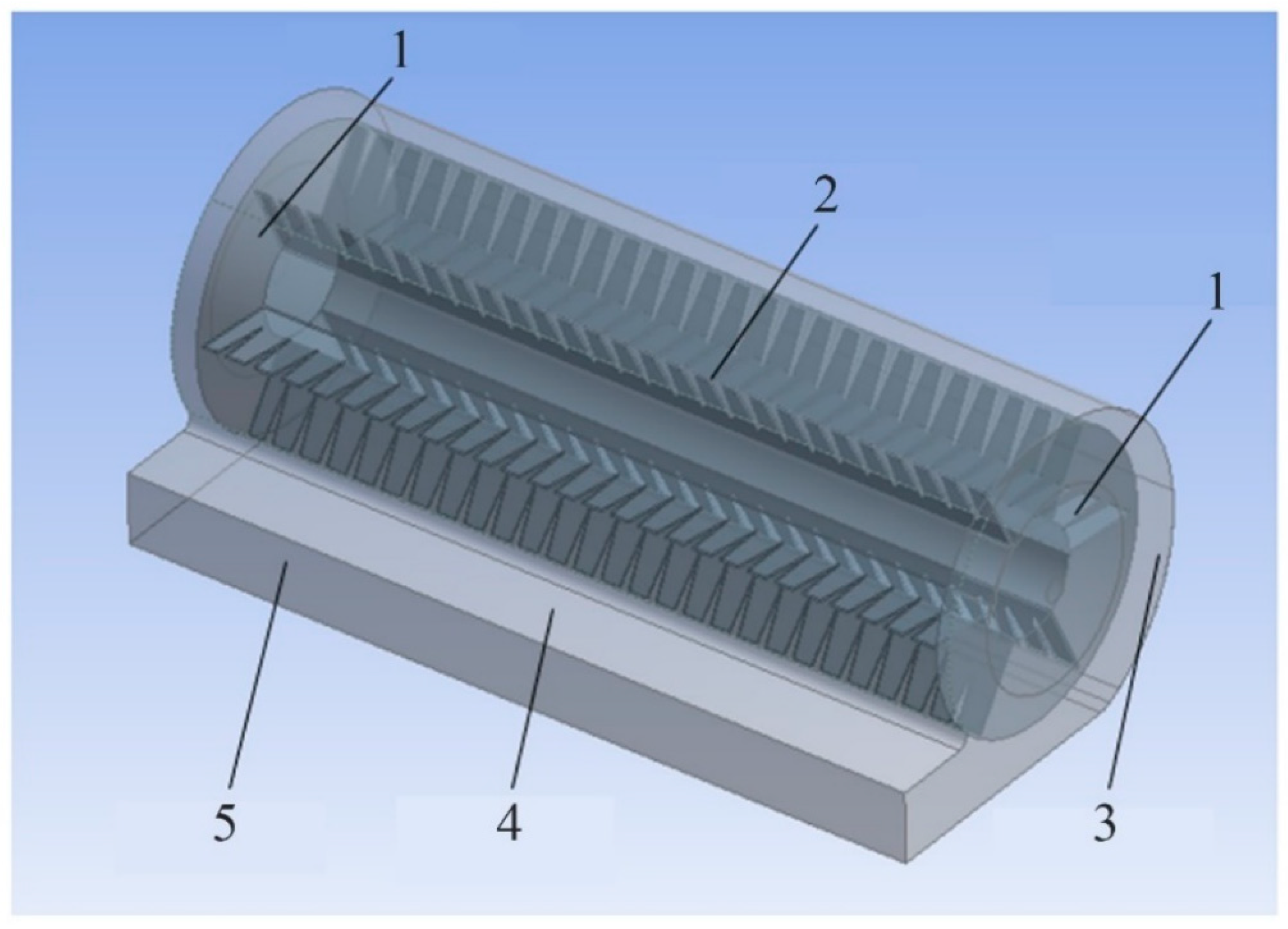
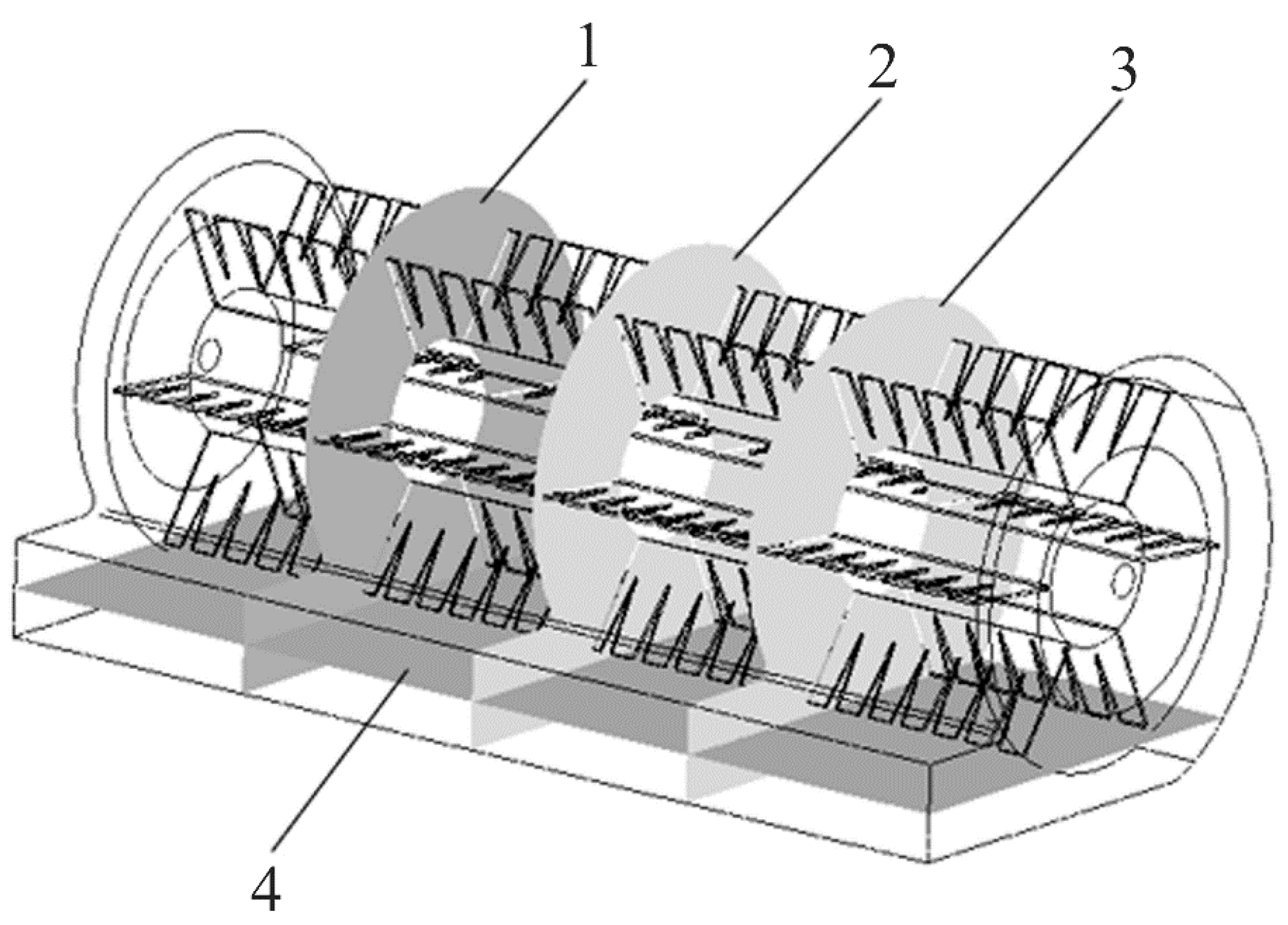
2.1. Structure and Working Principle of the Whole Machine
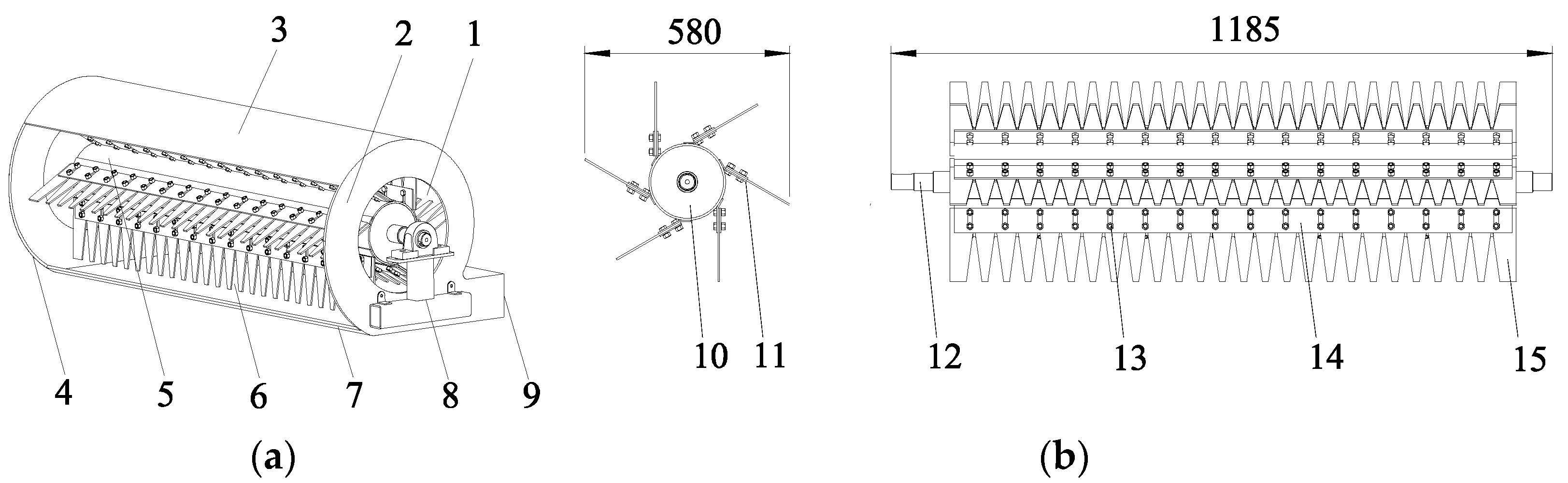
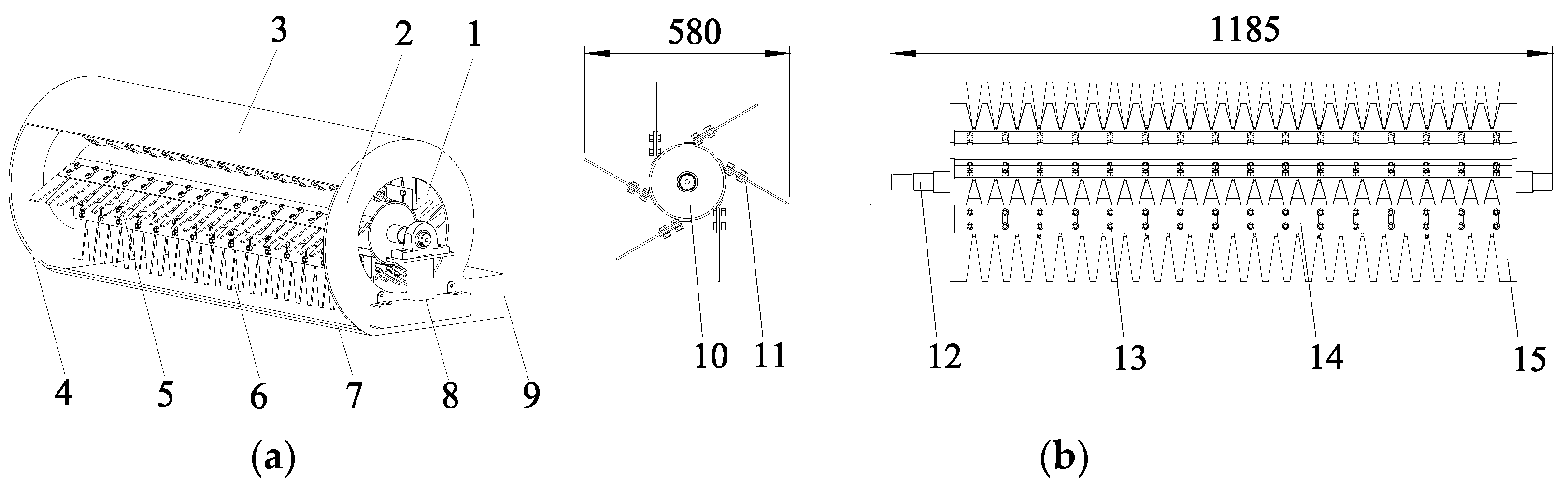
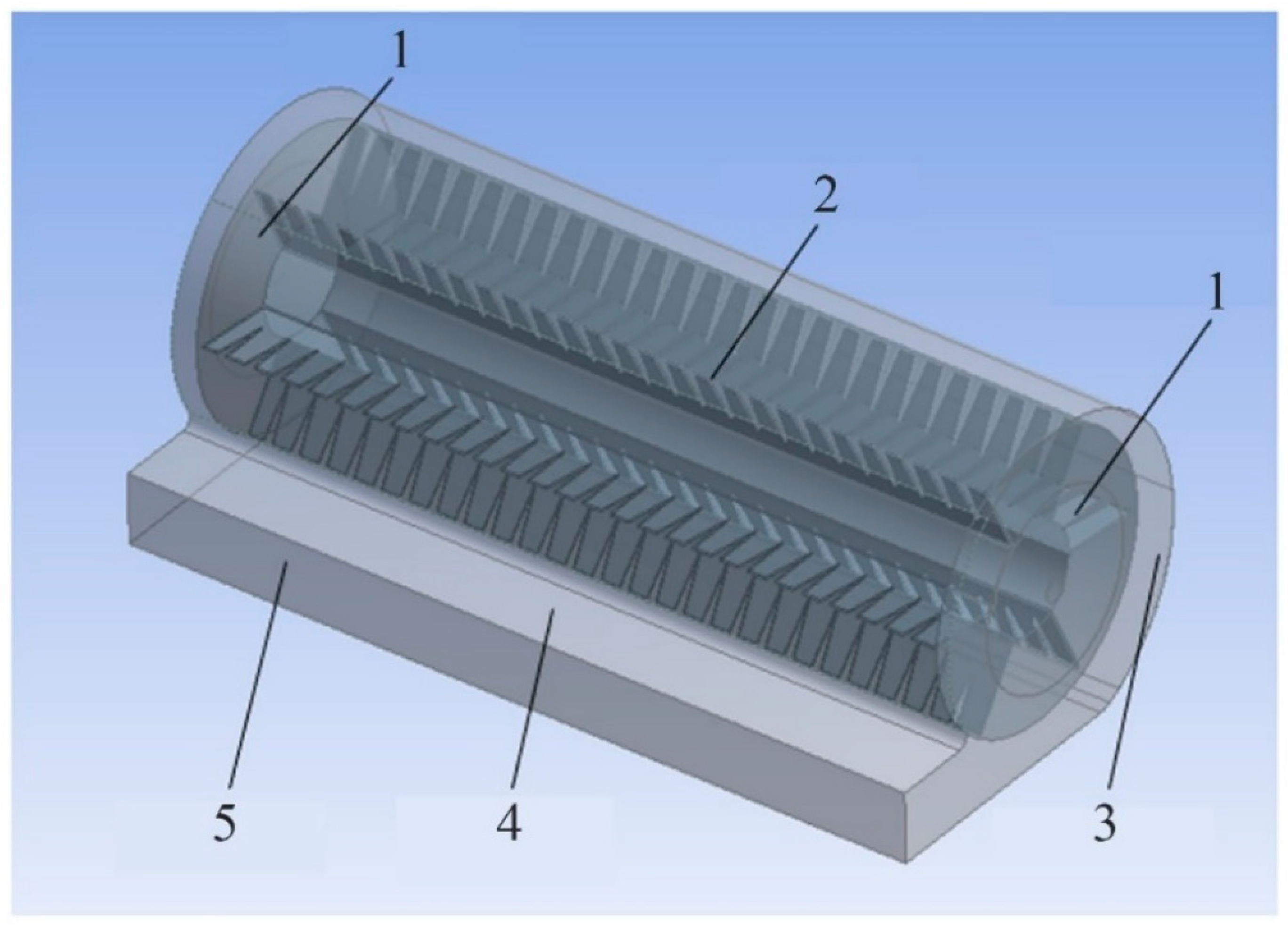
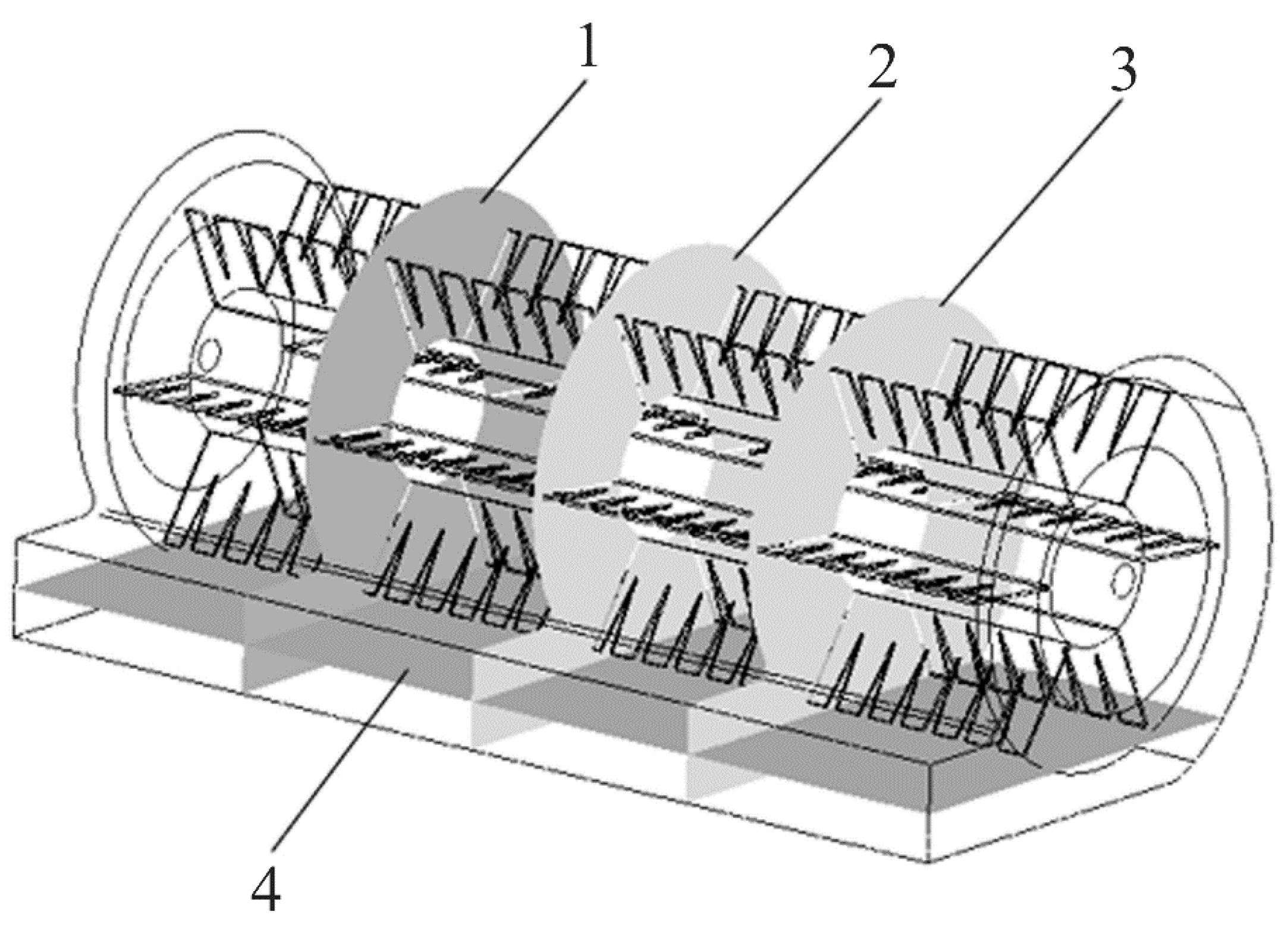
2.2. Design of Film Removal Device
2.3. Design of Blade
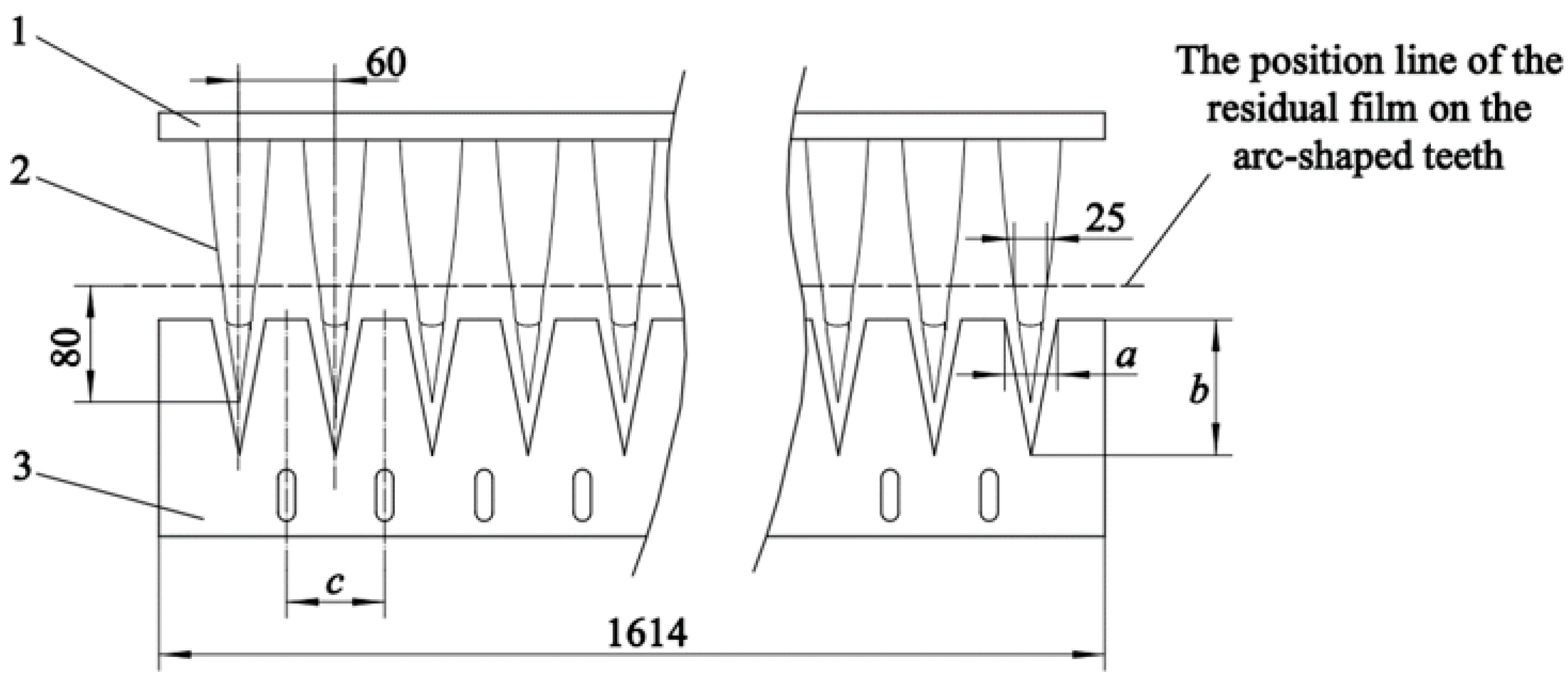
2.3.1. Design of Tooth Profile of Blade
2.3.2. Determination of the Number and Inclination Angle of the Blade
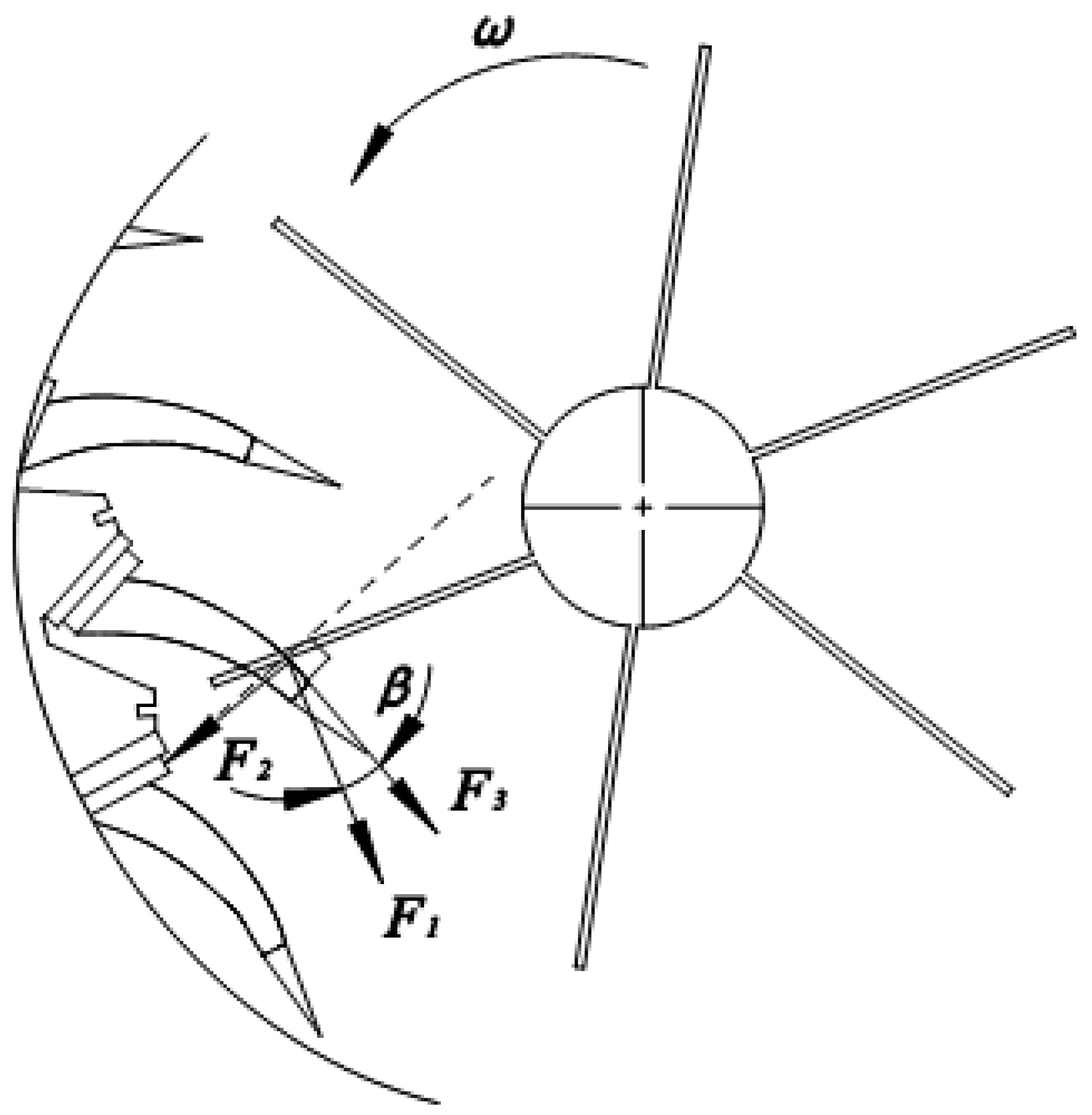
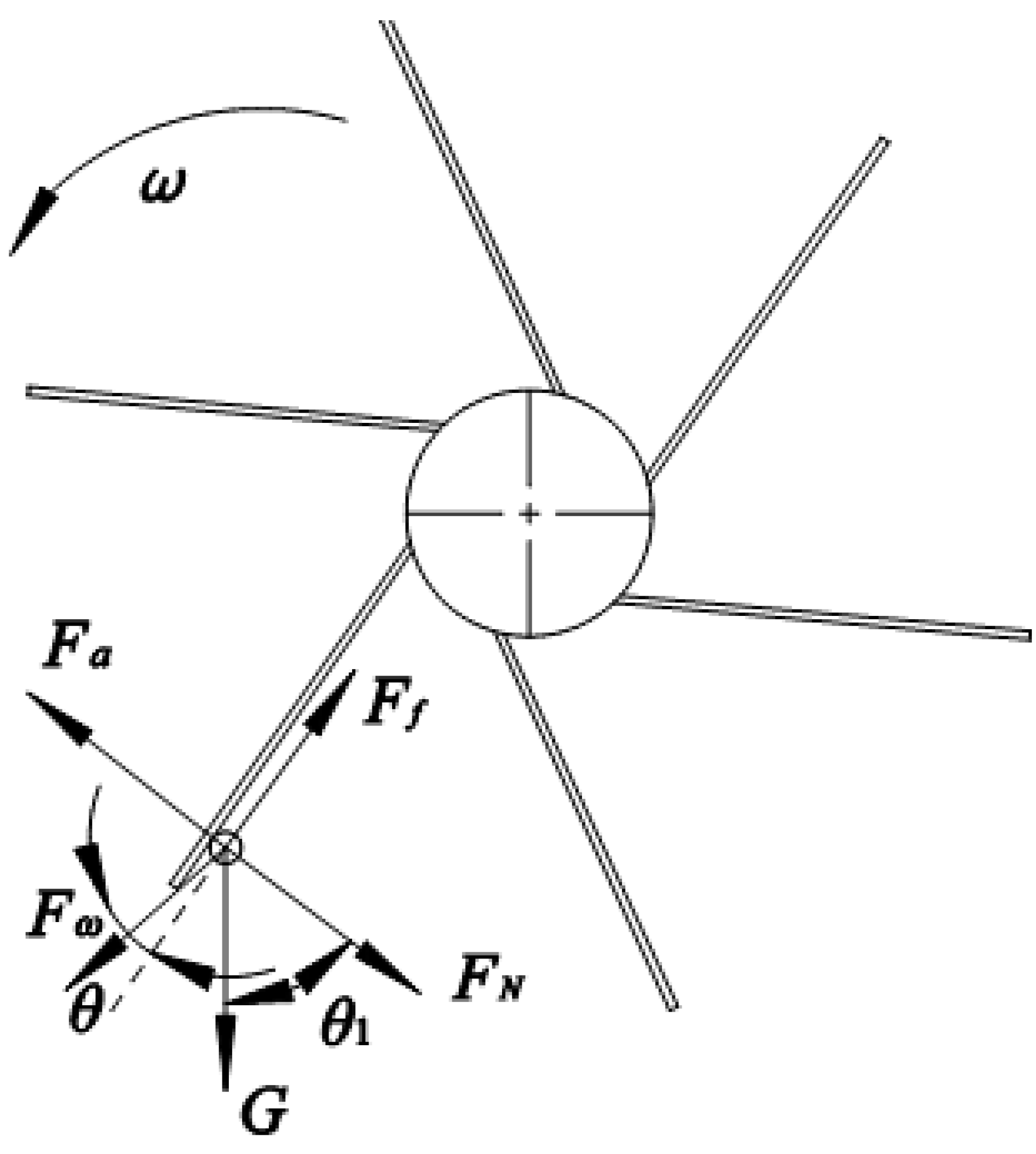
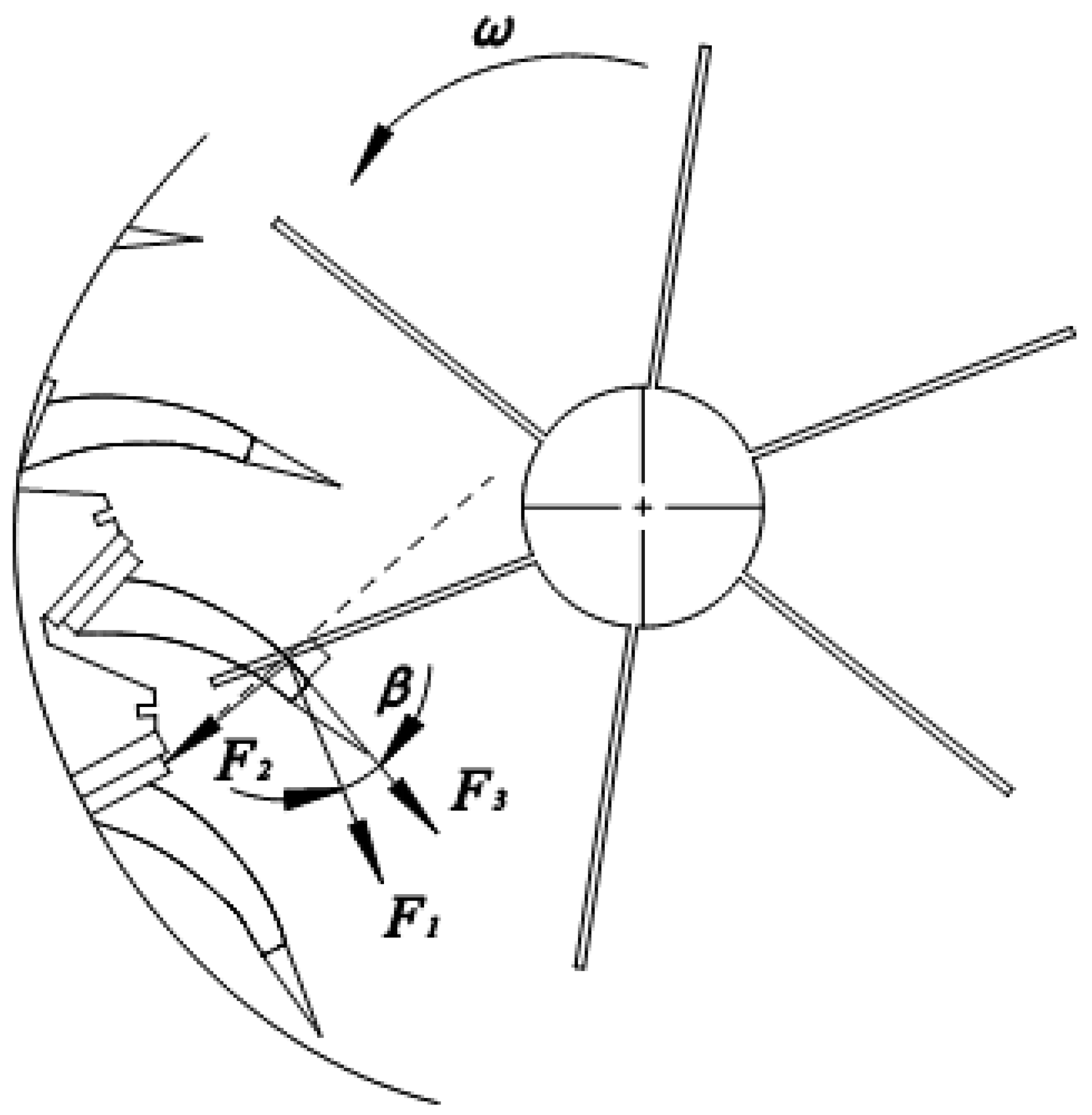
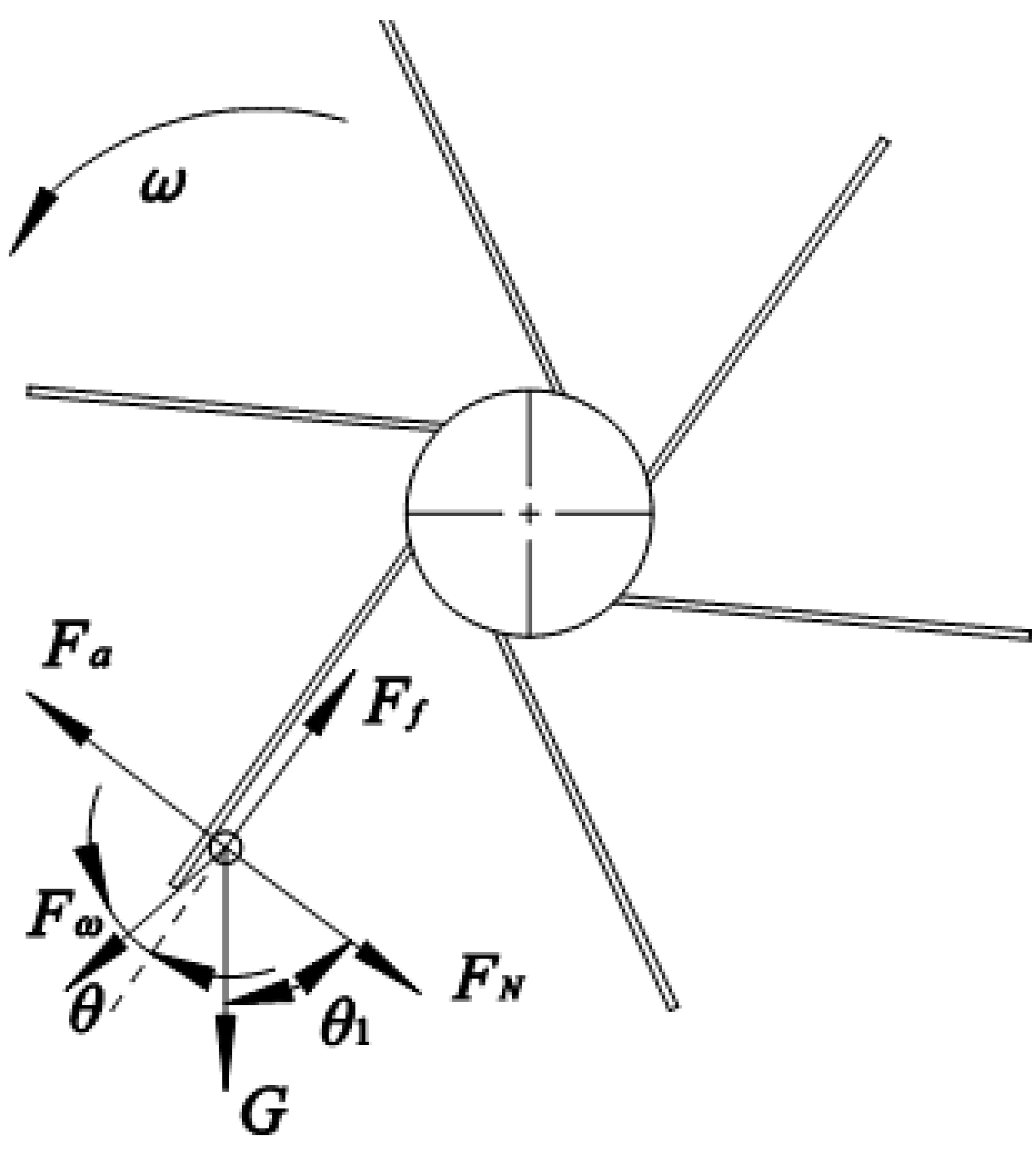
2.3.3. Analysis of the Conditions of Film Removal
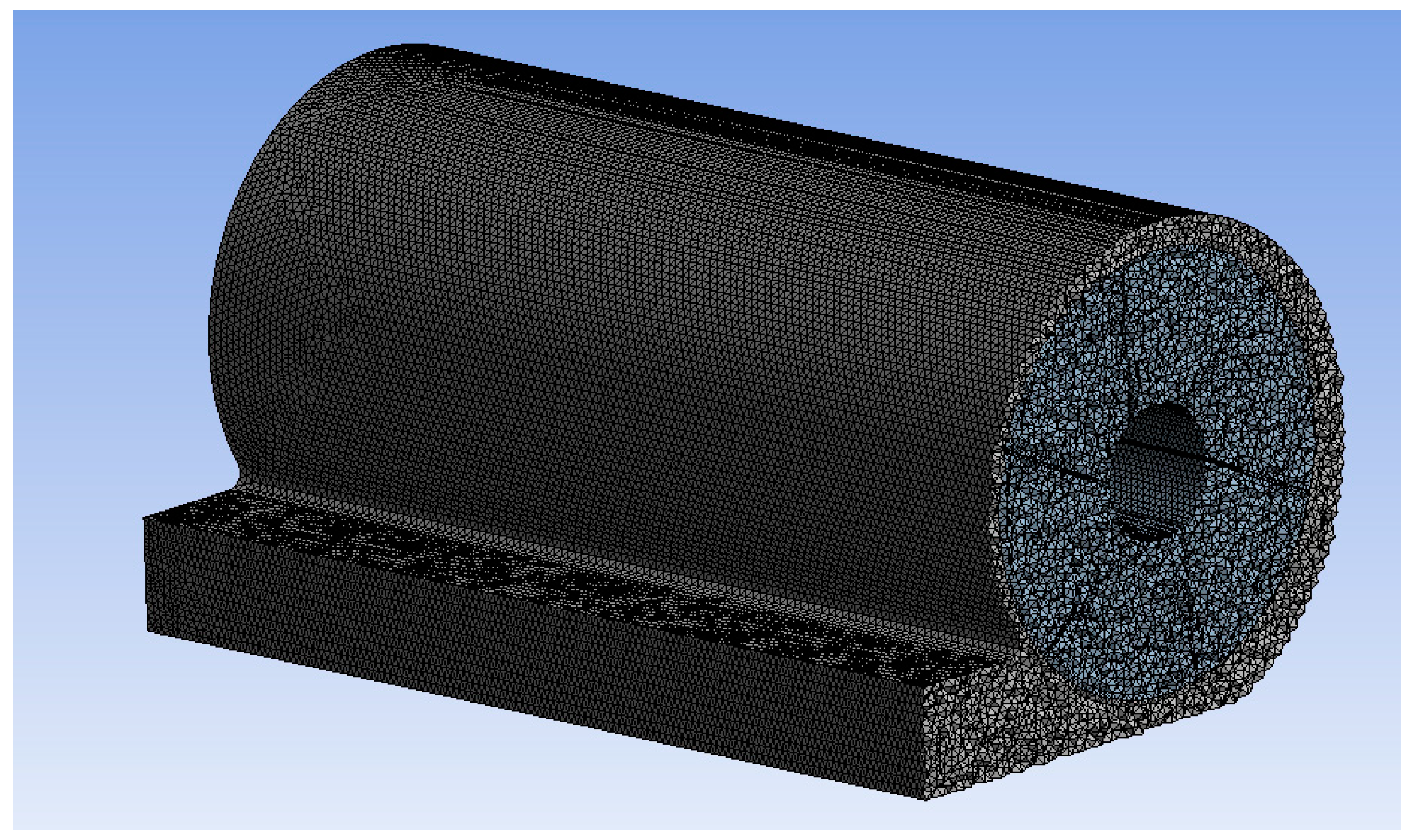
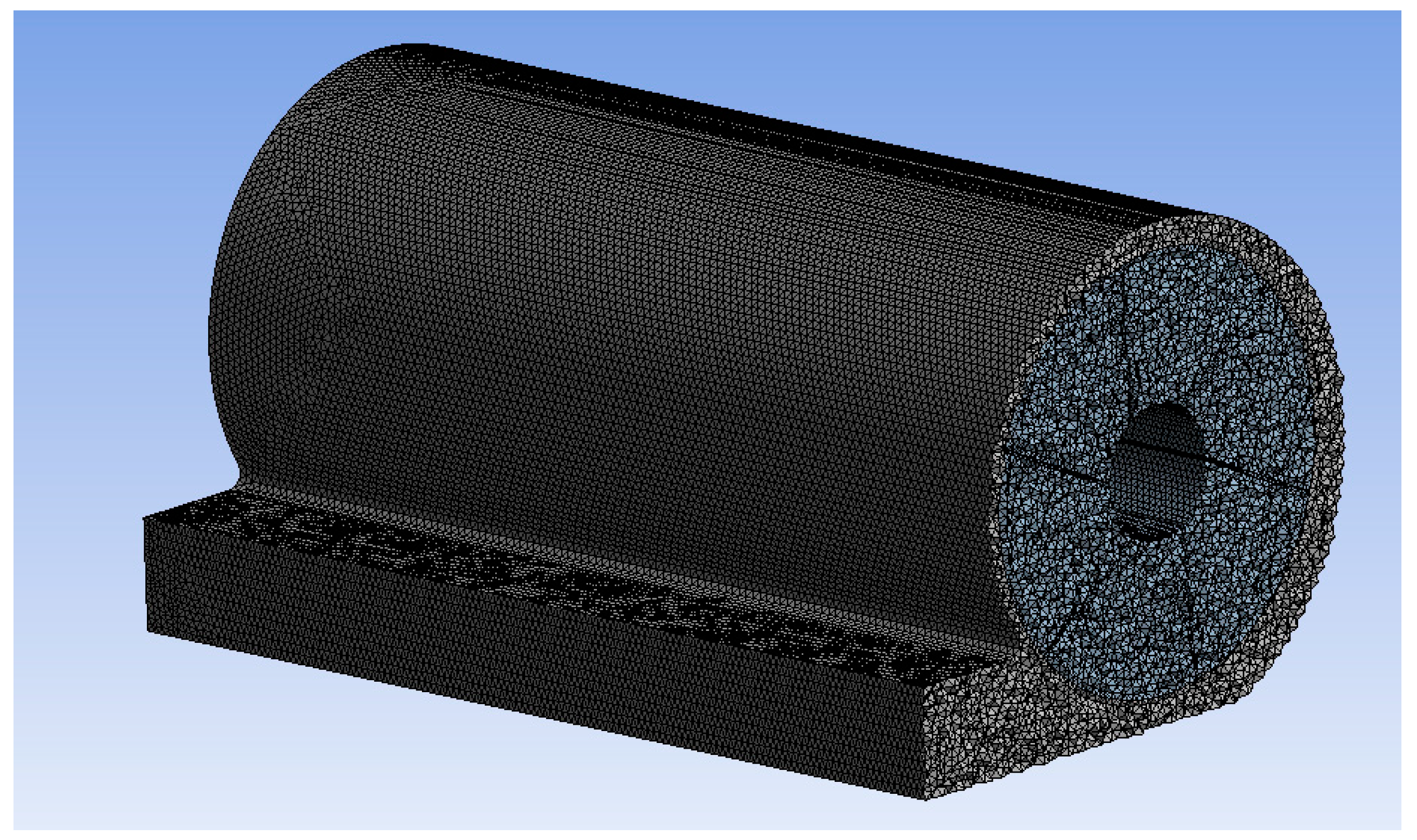
2.4. Simulation Model and Setting of Simulation Parameters
2.5. Test Verification
2.5.1. Test Condition
2.5.2. Test Methods
3. Results
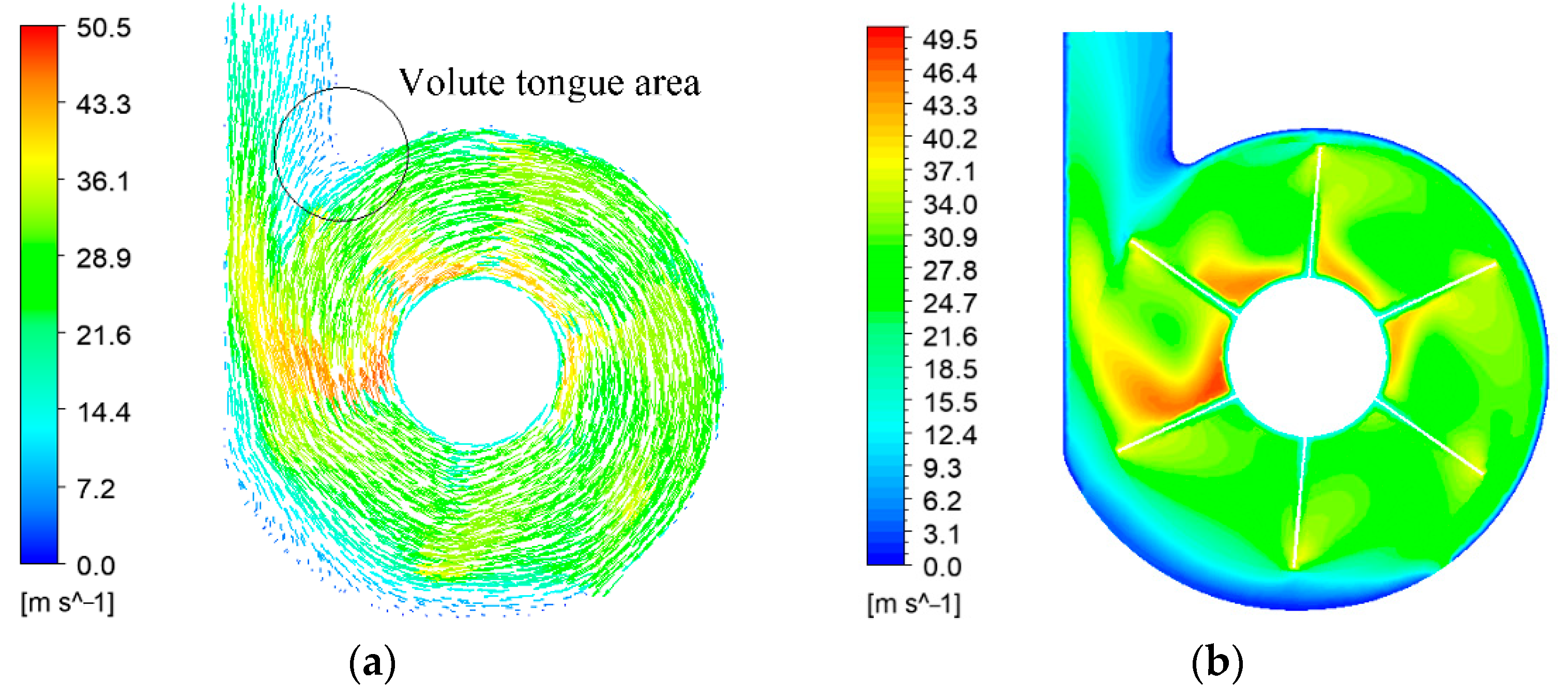
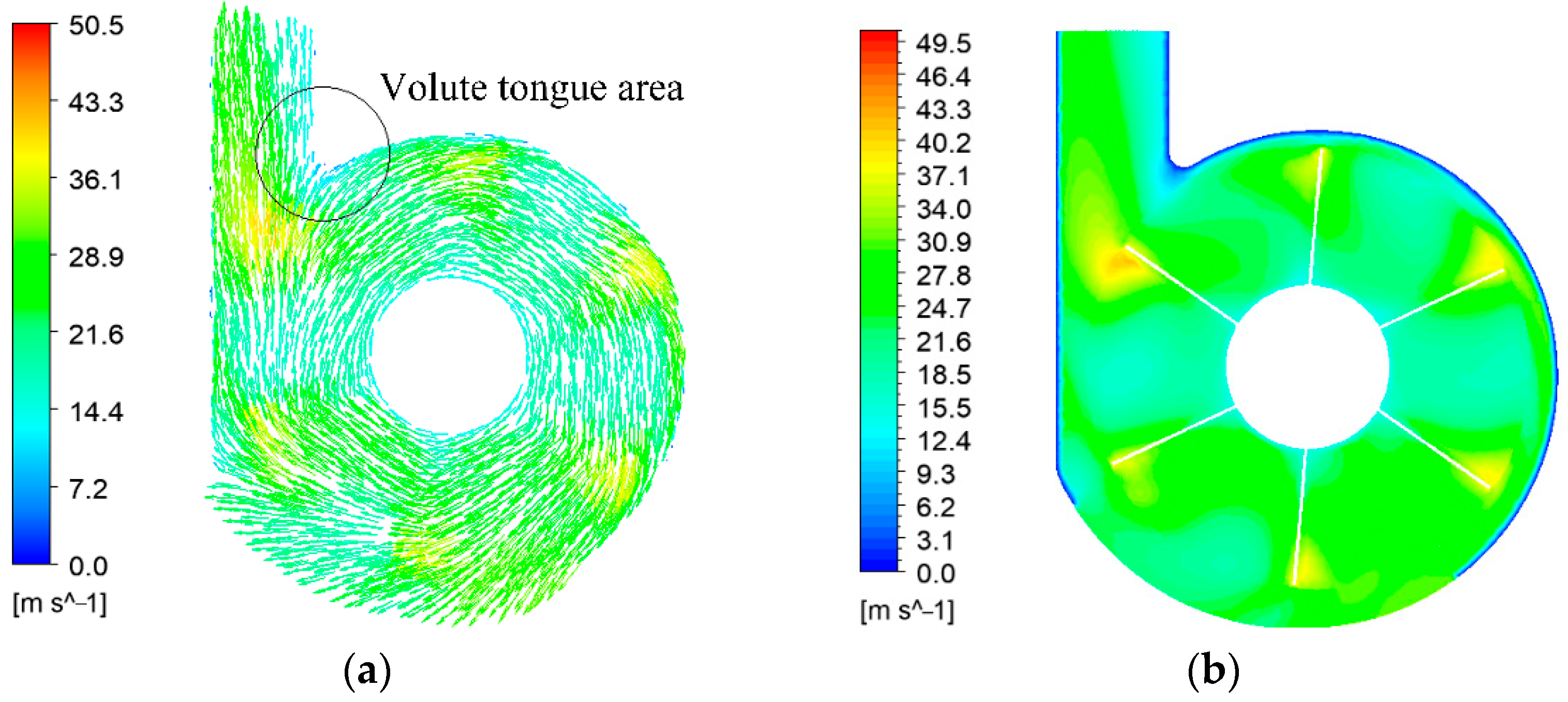
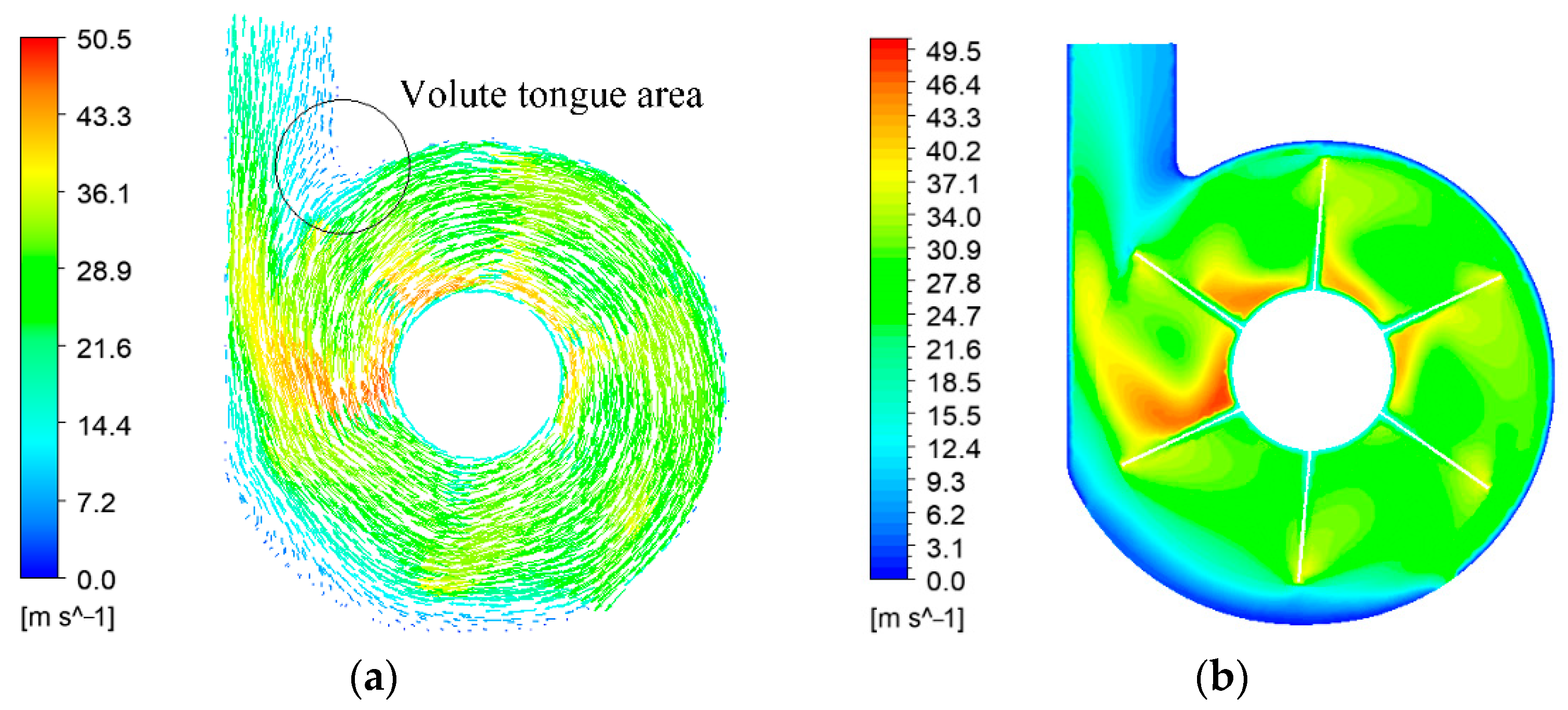
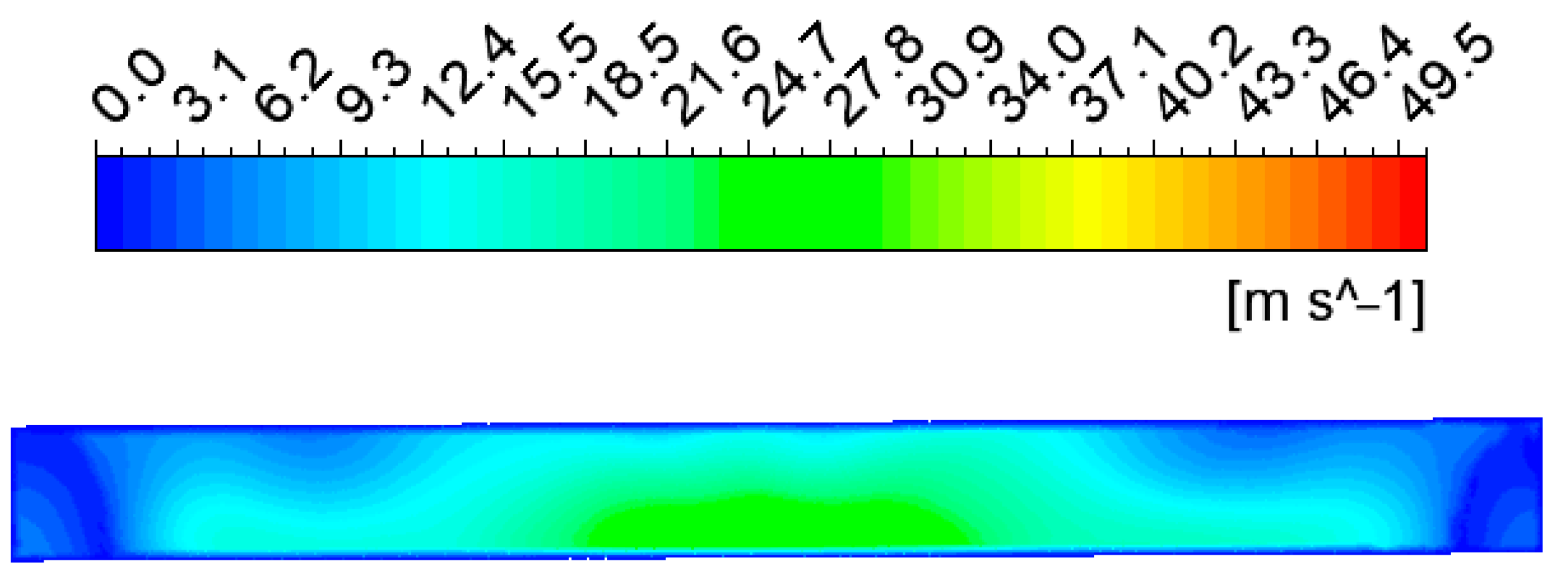
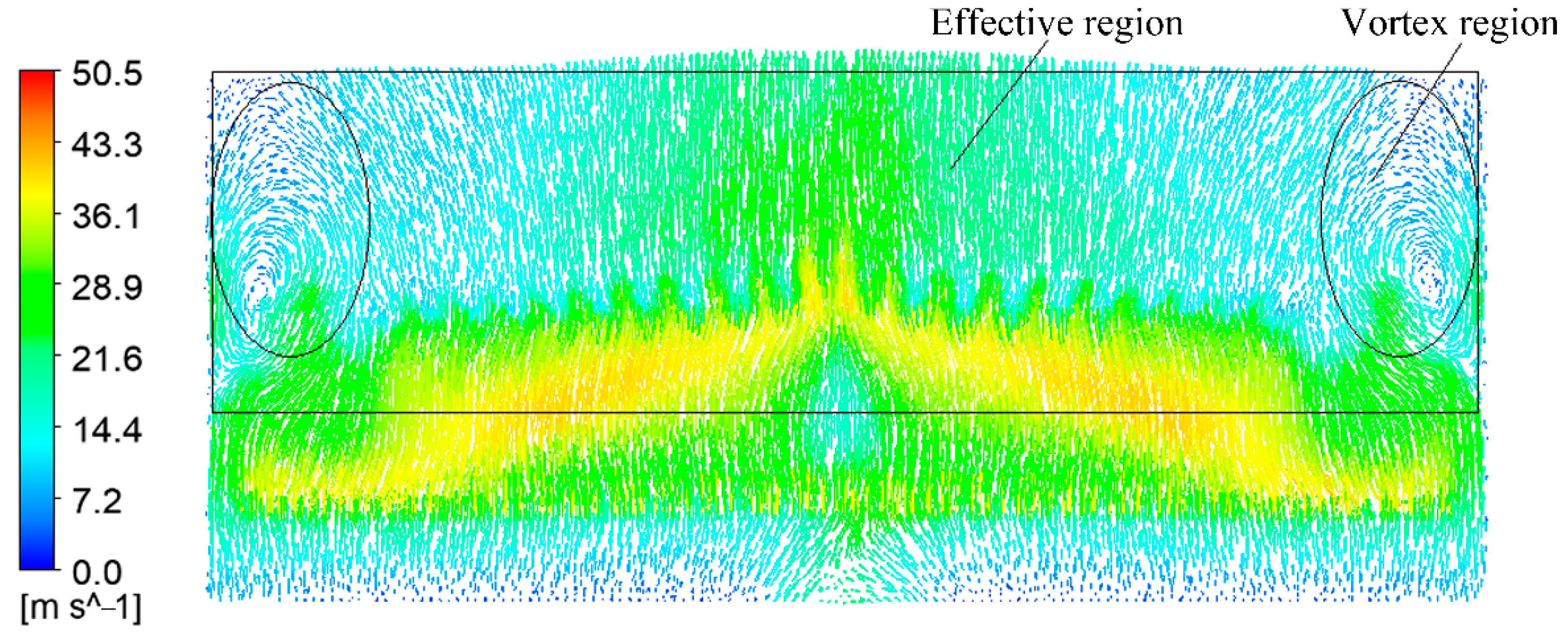
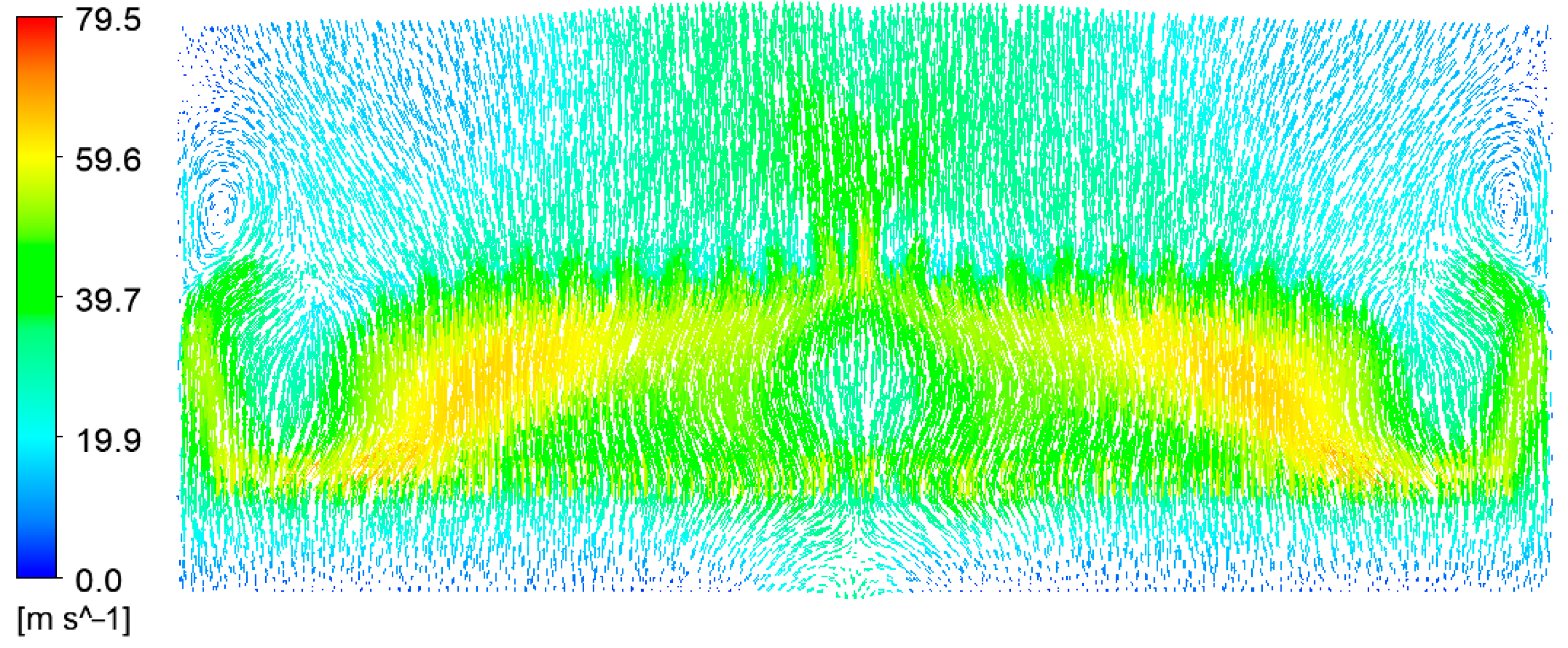
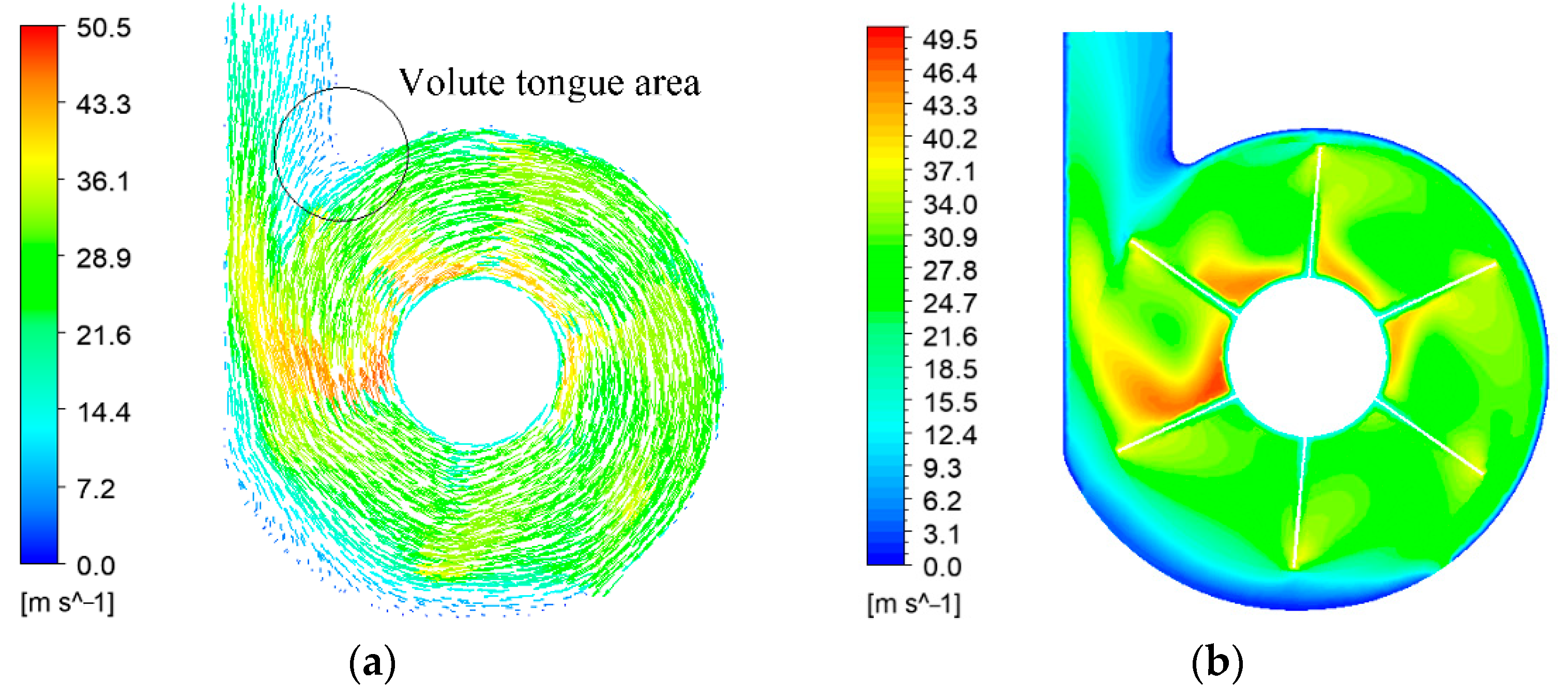
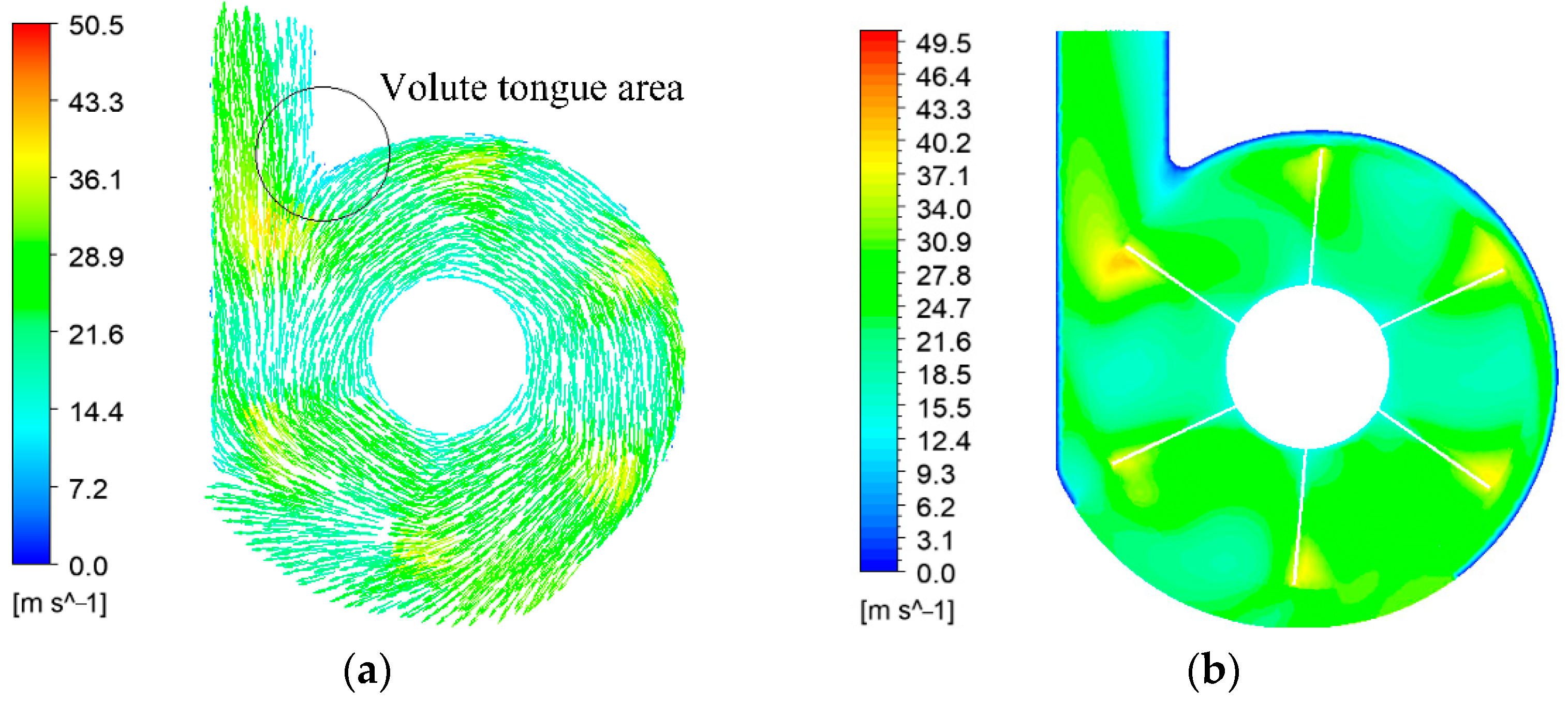
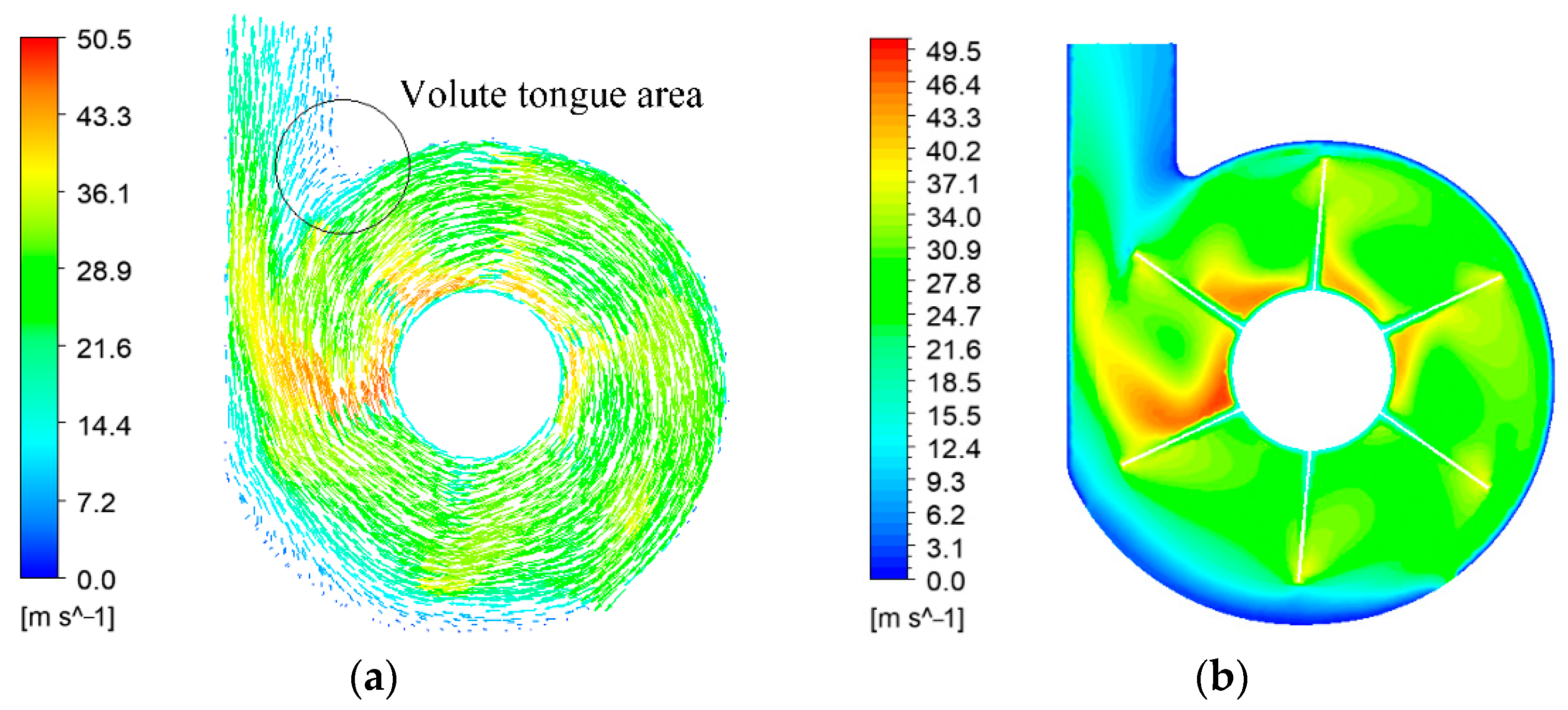
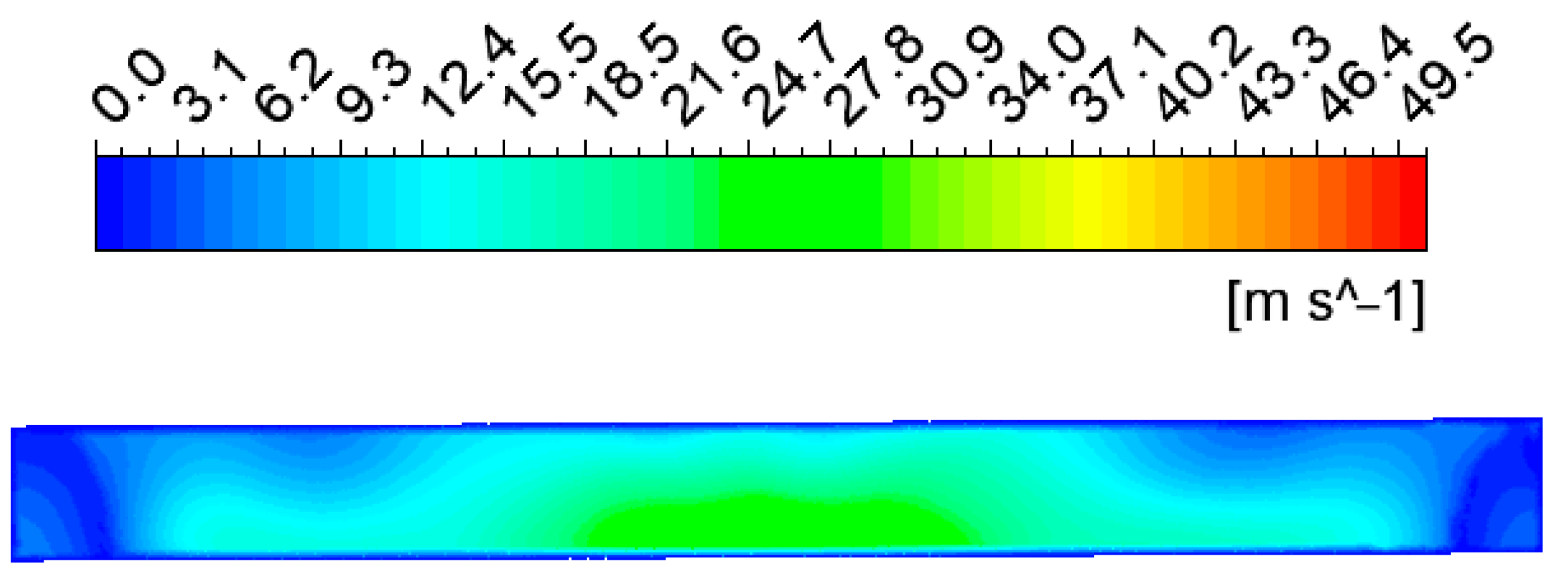
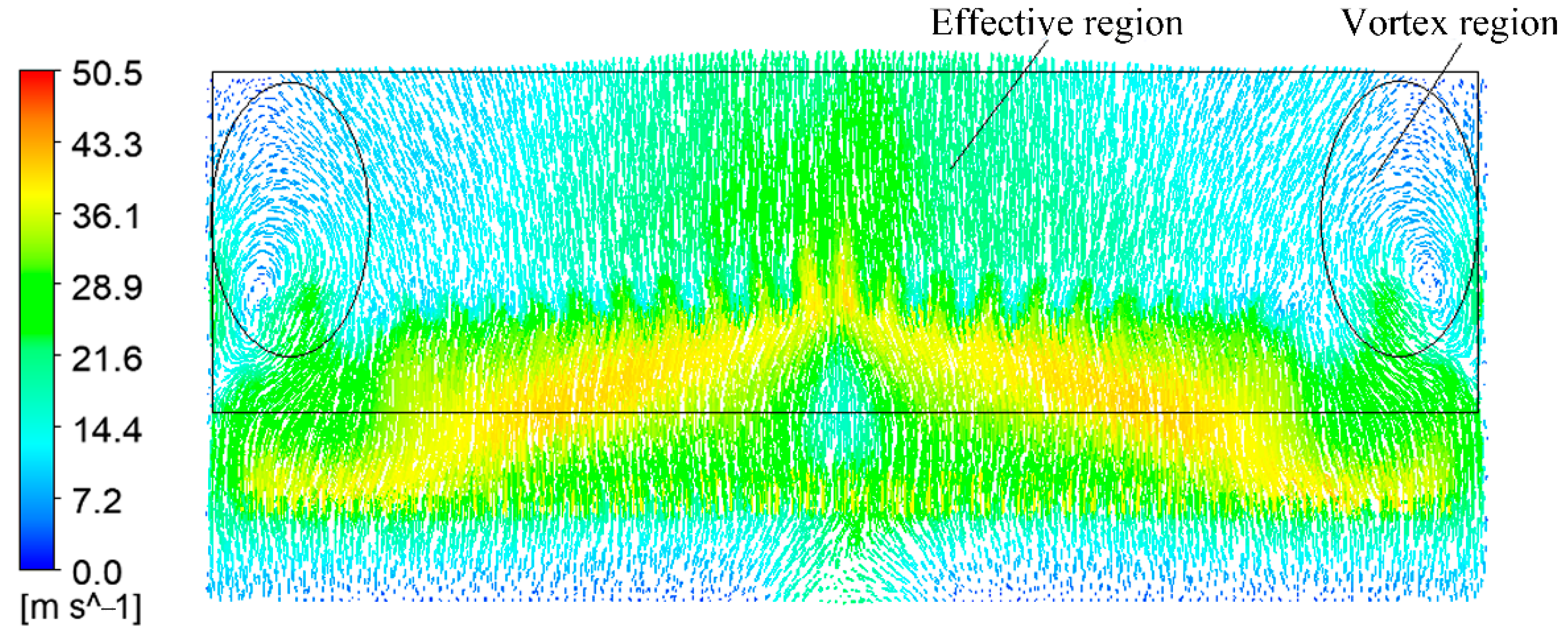
3.1. Analysis of Simulation Results
3.2. Design and Analysis of Orthogonal Test
3.2.1. Establishment of the Regression Equation and Significance Analysis of the Model
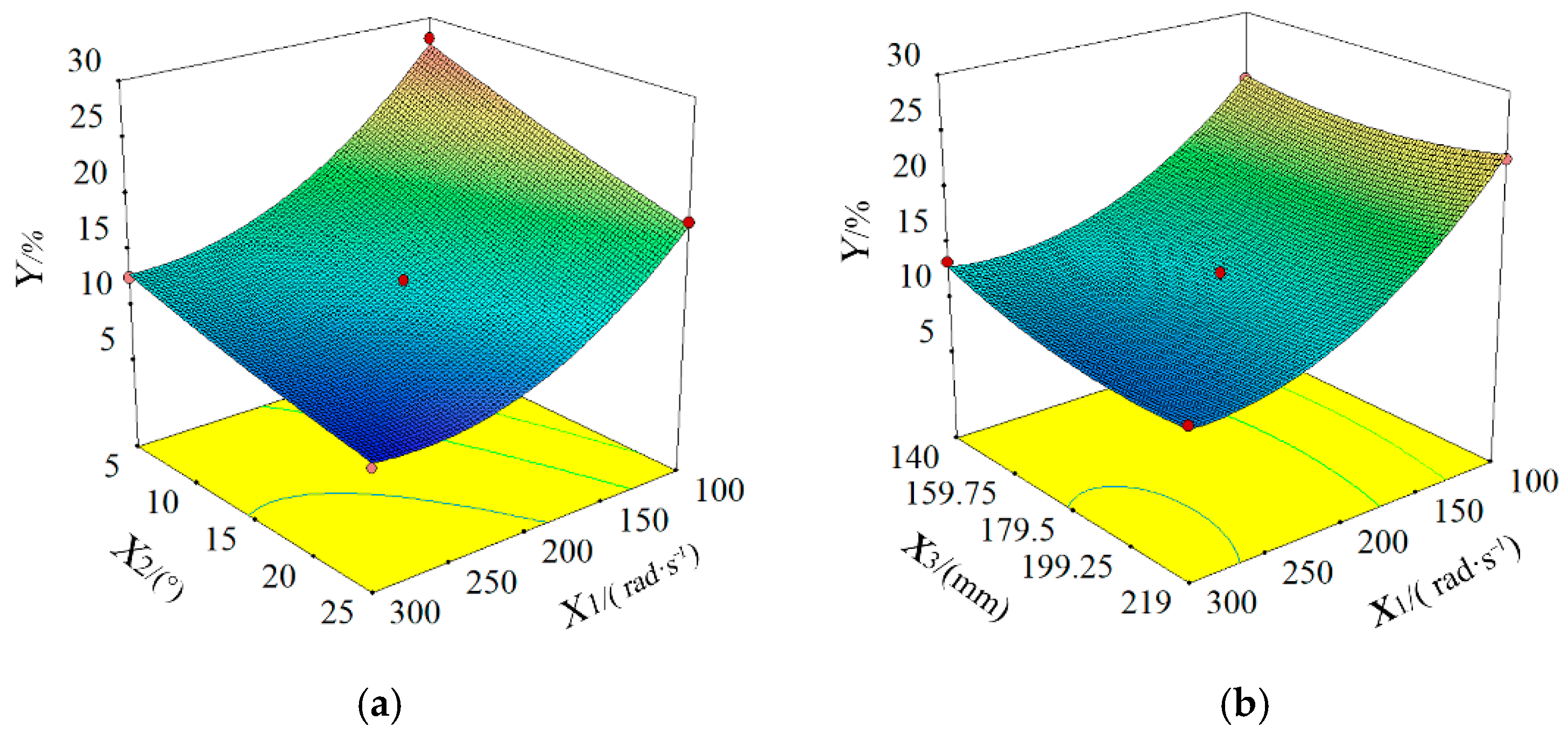
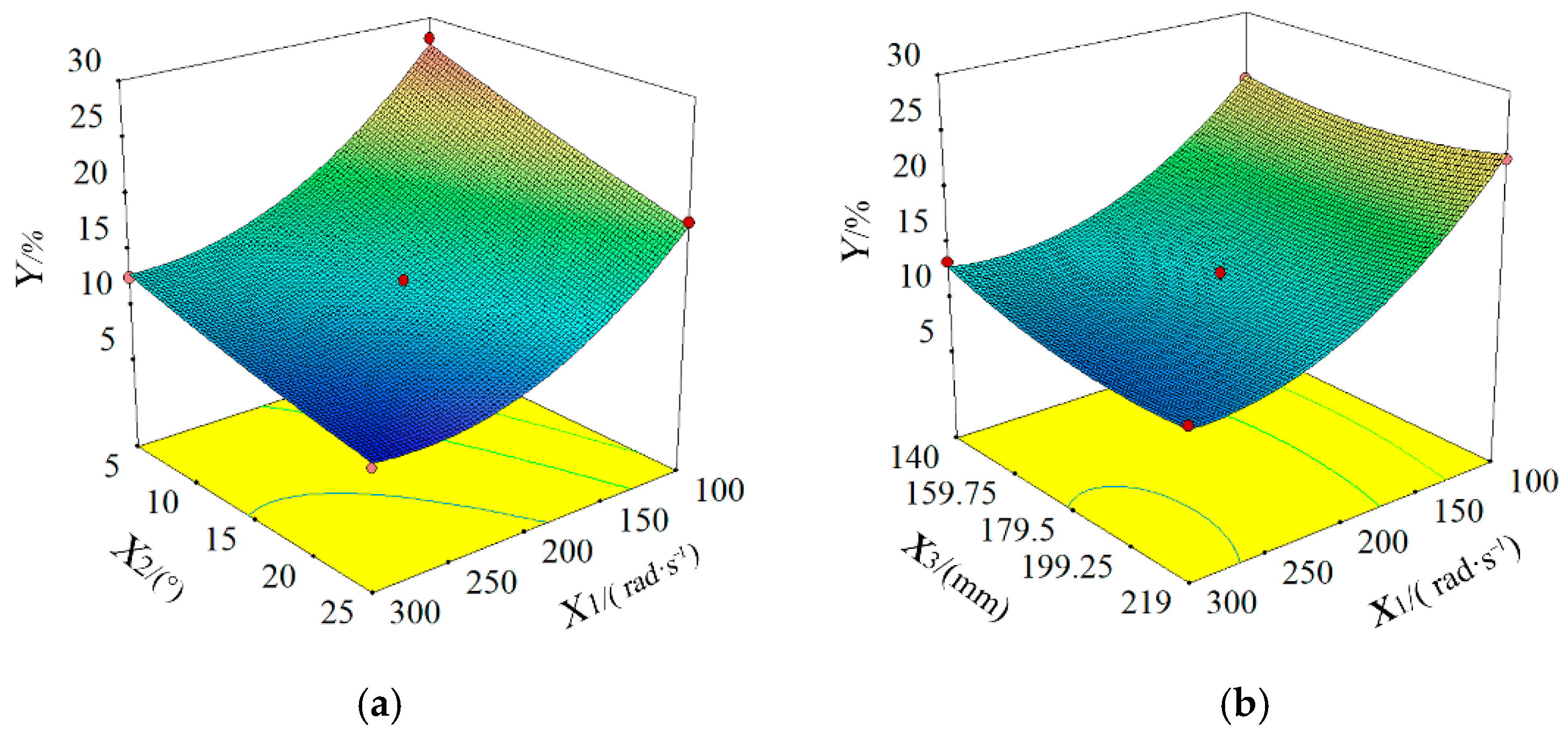
3.2.2. Analysis of the Influence of Test Factors on the Evaluation Index
3.2.3. Parameter Optimization
3.3. The Result of Test Verification
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Nomenclature
| a | the maximum distance between the teeth of adjacent blades: mm. |
| b | the tooth height of the blade, mm. |
| c | the distance between adjacent teeth, mm. |
| F1 | the force of the blade on the residual film when blades interact with arc-shaped teeth. |
| F2 | the decomposition force of F1 along the tip of the arc-shaped tooth, N. |
| F3 | the decomposition force of F1 along arc-shaped tooth’s normal direction, N. |
| β | the angle between and , . |
| the air resistance of the residual film, . | |
| the centrifugal force on the residual film, . | |
| the gravity of the residual film, . | |
| the supporting force of blade to residual film, . | |
| the friction force of the residual film, . | |
| the inclination angle of the detached blade, (°). | |
| the angle between the gravity of the residual film and the vertical direction of the detached blade, (°). | |
| the resistance coefficient. | |
| the air density, 1.29 kg/m3. | |
| the windward area of the residual film, m2. | |
| the linear velocity of the blade, m/s. | |
| the mass of the residual film, kg. | |
| the static friction coefficient of the detached blade. | |
| the distance between the residual film and the rotating center of the vane-type film removal roller, m. | |
| the linear velocity of the arc-shaped tooth, m/s. | |
| the distance of film removal, m. | |
| the average force of the blade to the residual film on the arc-shaped tooth, . | |
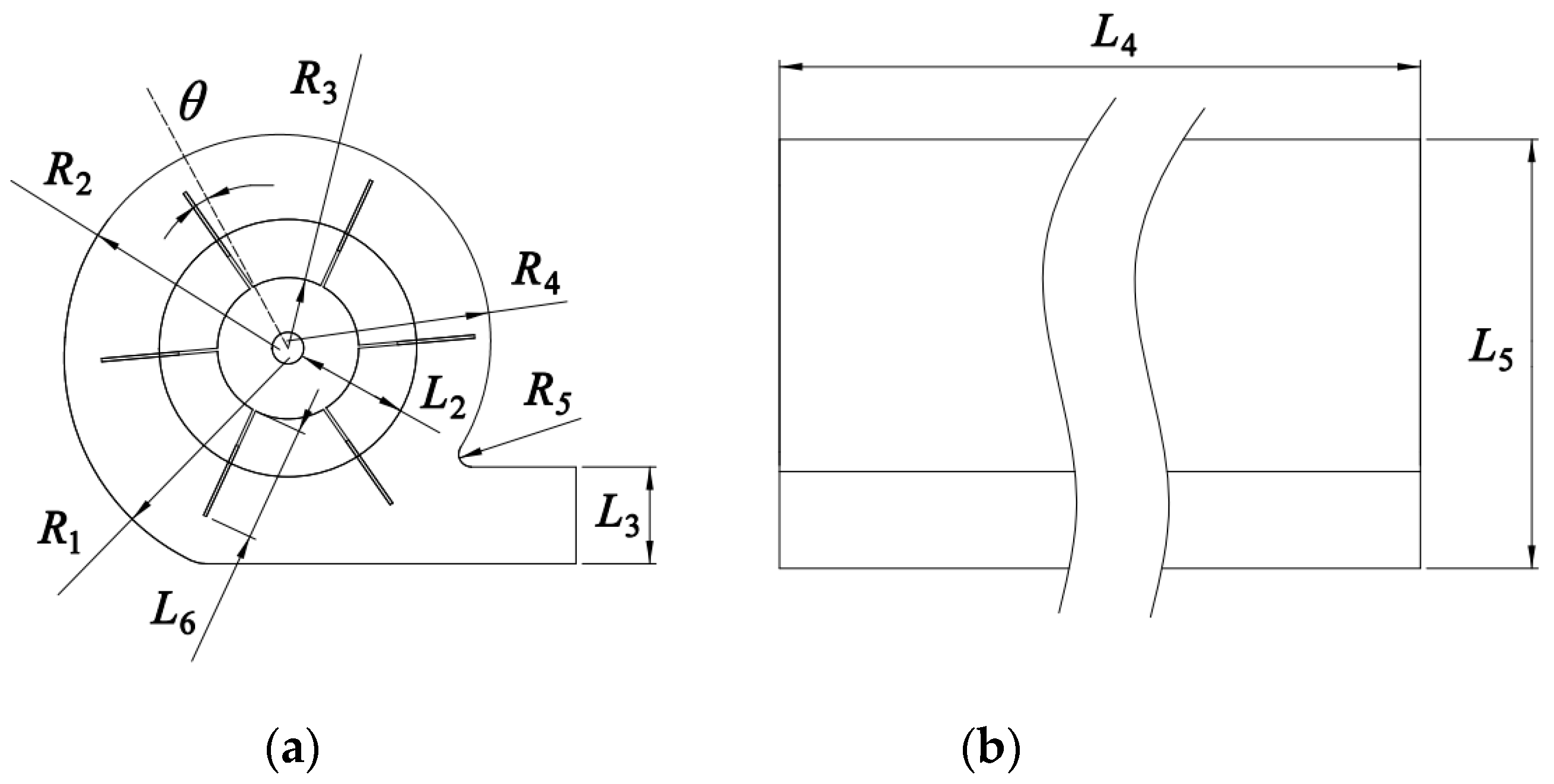
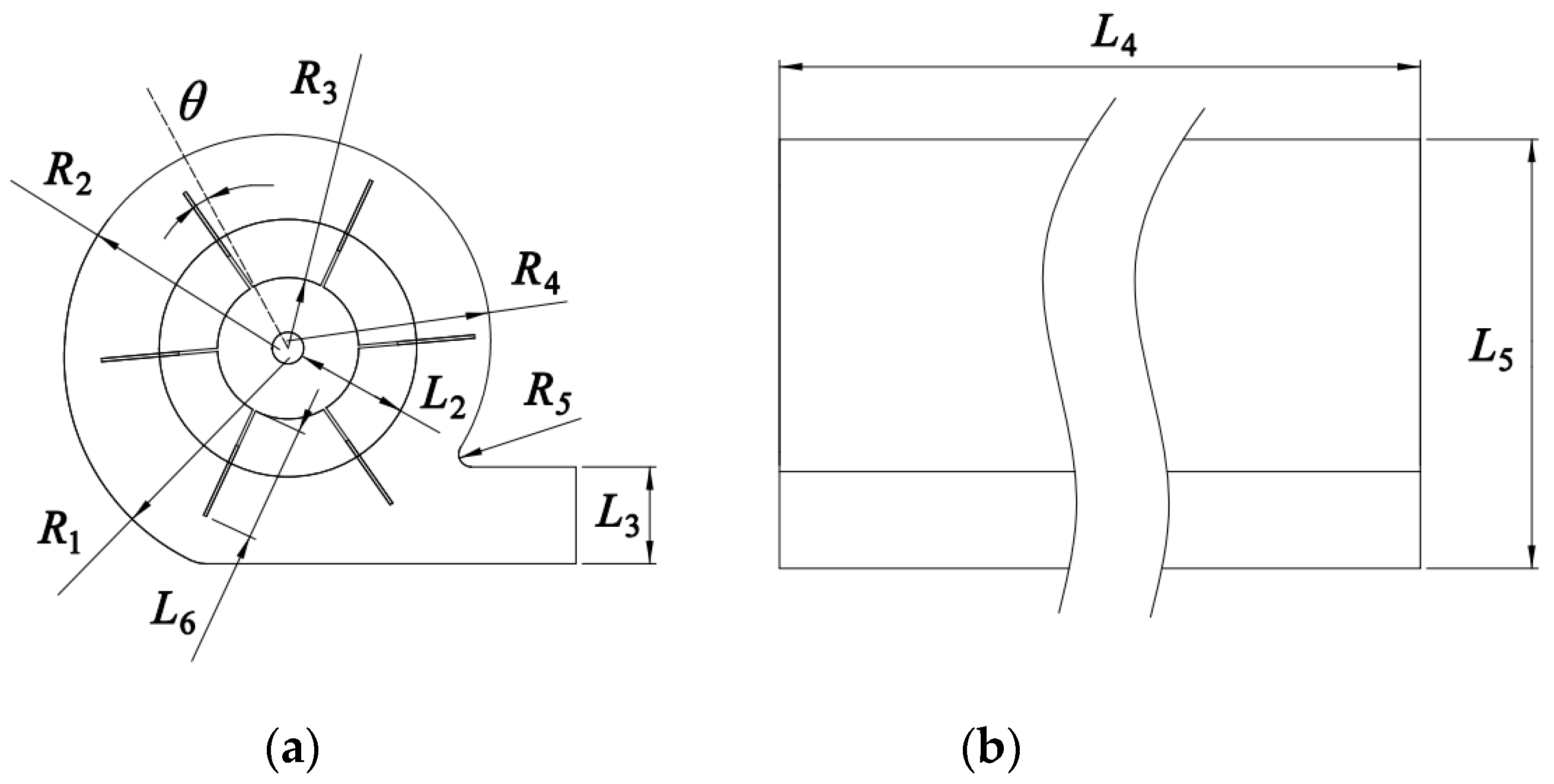
| R1, R2, R4, R5 | curve radius of diversion shell, mm. |
| R3 | the radius of roller, mm. |
| L2 | the size of inlet, mm. |
| L3 | the height of film conveying port, mm. |
| L4 | the length of simplified model L4, mm. |
| L5 | the width of simplified model L5, mm. |
| L6 | The length of blade L6. |
| the film removal rate, %. | |
| the weight of residual film in the residual film recovery box, g. | |
| the quality of the residual film that is picked up but does not enter the residual film recovery box, g. |
References
- Wen, L.; Song, Y. Pollution and prevention of waste plastic film on cultivated land in Xinjiang. In Agricultural Outlook; Agricultural Information Institute of CAAS: Beijing, China, 2020; Volume 16, pp. 103–106. [Google Scholar]
- Liu, E.K.; He, W.Q.; Yan, C.R. ‘White revolution’ to ‘white pollution’-agricultural plastic film mulch in China. Environ. Res. Lett. 2014, 9, 091001. [Google Scholar] [CrossRef] [Green Version]
- Picuno, P. Innovative material and improved technical design for a sustainable exploitation of agricultural plastic film. Polym. Plast. Technol. Eng. 2014, 53, 1000–1011. [Google Scholar] [CrossRef]
- Mendonca, S.R.; Avila, M.C.R.; Vital, R.G.; Evangelista, Z.R.; Pontes, N.D.; Nascimento, A.D. The effect of different mulching on tomato development and yield. Sci. Hortic. 2021, 275, 109657. [Google Scholar] [CrossRef]
- Jin, T.; Xue, Y.; Zhang, M.; Zhou, T.; Liu, H.; Zhang, K.; Xi, B. Application policies, implementation standards and recycling of agricultural plastic film at home and abroad. Ecol. Environ. Sci. 2020, 29, 411–420. [Google Scholar]
- Koskei, K.; Munyasya, A.N.; Wang, Y.B.; Zhao, Z.Y.; Zhou, R.; Indoshi, S.N.; Wang, W.; Cheruiyot, W.K.; Mburu, D.M.; Nyende, A.B.; et al. Effects of increased plastic film residues on soil properties and crop productivity in agro-ecosystem. J. Hazard. Mater. 2021, 414, 125521. [Google Scholar] [CrossRef]
- Zhou, X.; Wu, N.; Yan, W.; You, Z.; Shi, L.; Hu, Z. Optimization design of automatic film removal mechanism of rake tooth residual film recovery machine. J. Agric. Mech. Res. 2018, 40, 171–177. [Google Scholar]
- Yan, C.; Liu, E.; Shu, F.; Liu, Q.; Liu, S. Characteristics and prevention and control technology of plastic film mulching and residual pollution in China. J. Agric. Resour. Environ. 2014, 31, 95–102. [Google Scholar]
- He, W.; Yan, C.; Liu, S.; Chang, R.; Wang, X. Study on the application and pollution of plastic film in typical cotton areas. J. Agric. Resour. Environ. 2009, 28, 1618–1622. [Google Scholar]
- Wang, J.; Zhang, W.; Liu, X.; Dai, F.; Xin, S. Optimum design and experiment of corn full film double ridge and ditch residual film recovery machine. Trans. Chin. Soc. Agric. Mach. 2021, 52, 119–128. [Google Scholar]
- Jang, D.; Chen, X.; Yan, L.; Zhang, R.; Wang, Z. Study on technology and equipment for resource utilization of farmland residual film. J. Chin. Agric. Mech. 2020, 41, 179–190. [Google Scholar]
- Zhao, Y.; Chen, X.; Wen, H.; Zheng, X.; Niu, Q. Research status and Prospect of farmland residual film pollution control technology. Trans. Chin. Soc. Agric. Mach. 2017, 48, 1–14. [Google Scholar]
- Mu, D.; Yang, W. Design, and experimental study of elastic tooth pick up mechanism of residual film Reclaimer. J. Agric. Mech. Res. 2015, 37, 91–94. [Google Scholar]
- Li, M.; Ma, S. Research status and suggestions of residual film recycling machine in China. J. Agric. Mech. Res. 2014, 36, 242–245, 252. [Google Scholar]
- Jin, Z.; Zhang, R.; Qi, H.; Yang, X. Simulation, and test of the collection device of the residual film cleaning machine before sowing. J. Agric. Mech. Res. 2018, 40, 132–138. [Google Scholar]
- Xie, J.; Hou, S.; Zhang, X.; Fu, Y. Optimal design of residual film ejection mechanism based on predetermined trajectory. J. Agric. Mech. Res. 2015, 37, 89–92. [Google Scholar]
- Li, T.; Ding, S.; Gao, M.; Wang, J.; Hu, K. Flow field analysis of pneumatic film removal device based on flow simulation. J. Agric. Mech. Res. 2015, 37, 40–43. [Google Scholar]
- Kang, X.; Chen, X.; Zhao, Y.; Wang, D.; He, X.; Gou, H.; Zhou, D. Design, and test of stripping device of toothed belt type residual film recovery machine. J. Agric. Mech. Res. 2021, 43, 161–166. [Google Scholar]
- Jin, W.; Zhang, X.; Zhang, Z.; Shu, D.; Yan, J. Design and experimental study of stripping device of nail type residual film recovery machine. J. Agric. Mech. Res. 2014, 36, 172–175. [Google Scholar]
- Ming, G.; Bi, X.; Wang, X.; Hu, K.; Tang, Z.; He, Y. Study on pneumatic film stripping mechanism of clamping and conveying residual film pickup. J. Chin. Agric. Mech. 2016, 37, 1–5. [Google Scholar]
- Duan, W.; Wang, J.; Ming, G.; Li, Y.; Gong, H.; Niu, H.; Luo, W. Study on the relationship between pneumatic film removal and the characteristics of residual film materials. J. Agric. Mech. Res. 2017, 39, 51–54, 61. [Google Scholar]
- Xu, N.; Kang, J.; Zhang, H.; Peng, J.; Zhang, C. Experimental study on air suction residual film recovery and impurity removal machine. J. Chin. Agric. Mech. 2021, 42, 14–19. [Google Scholar]
- Li, D.; Zhao, W.; Xin, S.; Liu, X.; Xu, H.; Xu, Y. Research status and prospect of farmland residual film recovery technology. J. Chin. Agric. Mech. 2020, 41, 204–209. [Google Scholar]
- Zheng, S.; Cao, S.; Wang, M.; Lu, Y.; Ying, Y.; Sun, B.; Zhao, Y. Design and test of rotary film stripping residual film recovery machine. J. Northwest A F Univ. 2020, 48, 146–154. [Google Scholar]
- Cai, H. Design and Research on Mechanical and Pneumatic Composite Film Removal Device of Clamping Residual Film Recovery Machine. Master’s Thesis, Shihezi University, Shihezi, China, 2017. [Google Scholar]
- Meng, H.; Li, J.; Wang, N.; Kan, Z. Design of comb drum residual film recovery machine. J. Agric. Mech. Res. 2012, 34, 145–148. [Google Scholar]
- Tang, Y.; Zhang, Y.; Wang, J.; Wang, Z. Design, and test of stripping device for finger chain residual film recovery machine. Trans. Chin. Soc. Agric. Eng. 2020, 36, 11–19. [Google Scholar]
- Chen, X. Study on the Recovery Device of shallow Residual Film before Sowing Equipped with Land Preparation Machine. Master’s Thesis, Shihezi University, Shihezi, China, 2020. [Google Scholar]
- Zheng, S. Design and Experimental Study of Rake Type Rotary Stripping Residual Film Recovery Machine. Master’s Thesis, Shihezi University, Shihezi, China, 2020. [Google Scholar]
- Zhen, J. Design and Experimental Study of Comb Type Plough Layer Residual Film Recovery Machine. Master’s Thesis, Tarim University, Alar, China, 2019. [Google Scholar]
- Zhang, J.; Yang, C.; Guo, J.; Jiang, Y.; Zhang, H. Design and test of hob type silage corn stubble and residual film recovery combined operation machine. Trans. Chin. Soc. Agric. Eng. 2018, 34, 25–34. [Google Scholar]
- Wang, X.; Li, C.; Shi, J.; Chen, F.; Dong, Y. Wind field simulation of throwing straw crushing and returning machine. Trans. Chin. Soc. Agric. Mach. 2007, 8, 67–69. [Google Scholar]
- Zhai, Z.; Wu, Y.; Wang, C. Motion simulation and high-speed camera analysis of material along throwing blade. Trans. Chin. Soc. Agric. Eng. 2012, 28, 23–28. [Google Scholar]
- Niu, Q.; Ji, C.; Zhao, Y.; Chen, X.; Zheng, X.; Li, H. Design and test of pick-up and cleaning device for strip collecting residual film packer. Trans. Chin. Soc. Agric. Mach. 2017, 48, 101–107. [Google Scholar]
- Zhang, X.; Liu, J.; Shi, Z.; Jin, W.; Yan, J.; Yu, M. Design, and parameter optimization of reverse membrane soil separation device for residual membrane reclaimer. Trans. Chin. Soc. Agric. Eng. 2019, 35, 46–55. [Google Scholar]
- Guo, W.; He, X.; Wang, L.; Zhao, P.; Hu, C.; Hou, S.; Wang, X. Development of comb tooth film lifting and pneumatic film stripping residual film recovery machine for plough layer. Trans. Chin. Soc. Agric. Eng. 2020, 36, 1–10. [Google Scholar]
- Chen, X.; Chen, X.; Li, J.; Li, C.; Yang, Y. Design, and test of the nail-tooth drum-type residual film recovery device before sowing. Trans. Chin. Soc. Agric. Eng. 2020, 36, 30–39. [Google Scholar]
- Hu, R. Analysis of particle motion on a plane blade rotating at constant speed around the horizontal axis. Trans. Chin. Soc. Agric. Mach. 1980, 4, 62–72. [Google Scholar]
- Zhang, Z.; He, J.; Li, H.; Wang, Q.; Ju, J.; Yan, X. Design and test of adjustable straw crushing, throwing and returning machine. Trans. Chin. Soc. Agric. Mach. 2017, 48, 76–87. [Google Scholar]
- Zhao, M.; Huang, Q. Design, and performance test of key components of forage harvester. Trans. Chin. Soc. Agric. Mach. 2013, 44, 91–95. [Google Scholar]
- Ding, H.; Chang, T.; Lin, F. The Influence of the Blade Outlet Angle on the Flow Field and Pressure Pulsation in a Centrifugal Fan. Processes 2020, 8, 1422. [Google Scholar] [CrossRef]
- Hu, K.; Wang, J.; Li, B.; Jiang, P.; Ding, S.; Li, T. Development, and test of combined operation machine for cotton stalk crushing and returning to field and residual film recovery. Trans. Chin. Soc. Agric. Eng. 2013, 29, 24–32. [Google Scholar]
- Li, B.; Wang, J.; Hu, K.; Jiang, P. Mechanism analysis and test of forward film removal of residual film recovery machine. Trans. Chin. Soc. Agric. Eng. 2012, 28, 23–28. [Google Scholar]
- Xie, J.; Zhang, F.; Chen, X.; Han, Y.; Tang, W. Design and parameter optimization of arc tooth rolling residual film recovery machine. Trans. Chin. Soc. Agric. Eng. 2019, 35, 26–37. [Google Scholar]
- Kang, J.; Zhang, H.; Zhang, G.; Du, H.; Peng, Q.; Du, Y. Aerodynamic characteristics of residual film materials and test of membrane impurity separation device. J. Chin. Agric. Mech. 2020, 41, 167–172. [Google Scholar]
- Dong, Q.; Feng, X. Parameter optimization of airflow lint cleaning machine based on CFD discrete phase model. Trans. Chin. Soc. Agric. Eng. 2014, 30, 9–16. [Google Scholar]
- Ding, H. Application of “calculating the area of irregular figure by pixel method” in experiment. Phys. Teach. 2014, 35, 49–50. [Google Scholar]
- Kang, J.; Peng, Q.; Wang, S.; Song, Y.; Cao, S.; He, L. Improved design, and test of pickup device of elastic tooth residual film reclaimer. Trans. Chin. Soc. Agric. Mach. 2018, 49, 295–303. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| Curve radius of diversion shell R1, R2, R4, R5, | 349 mm, 333 mm, 316 mm, 20 mm |
| The radius of roller R3 | 109.5 mm |
| The inclination angle of the blade θ | 5° |
| The size of inlet L2 | 175 mm |
| The height of film conveying port L3 | 150 mm |
| The length of simplified model L4 | 1700 mm |
| The width of simplified model L5 | 665 mm |
| The length of blade L6 | 180 mm |
| Parameters | Value |
|---|---|
| The average firmness of the soil (depth: 0~100 mm) | 171 kPa |
| The average moisture content of the soil (depth: 0~100 mm) | 13% |
| Residual film content in soil (depth: 0~100 mm, area: 1 m2) | 7 g |
| Levels | Test Factors | ||
|---|---|---|---|
| Rotating Speed of the Vane Type Film Removal Roller X1/(rad·min−1) | Inclination Angle of the Blade X2/(°) | Diameter of the Roller X3/(mm) | |
| −1 | 100 | 5 | 140 |
| 0 | 200 | 15 | 179.5 |
| 1 | 300 | 25 | 219 |
| Test Number | Rotating Speed of the Vane Type Film Removal Roller x1 | Inclination Angle of the Blade x2 | Diameter of the Roller x3 | Evaluation Index |
|---|---|---|---|---|
| Area Ratio Y/% | ||||
| 1 | −1 | −1 | 0 | 28.04 |
| 2 | 1 | −1 | 0 | 12.61 |
| 3 | −1 | 1 | 0 | 19.31 |
| 4 | 1 | 1 | 0 | 7.29 |
| 5 | −1 | 0 | −1 | 23.65 |
| 6 | 1 | 0 | −1 | 13.34 |
| 7 | −1 | 0 | 1 | 24.19 |
| 8 | 1 | 0 | 1 | 10.12 |
| 9 | 0 | −1 | −1 | 18.65 |
| 10 | 0 | 1 | −1 | 10.87 |
| 11 | 0 | −1 | 1 | 16.36 |
| 12 | 0 | 1 | 1 | 10.84 |
| 13 | 0 | 0 | 0 | 12.09 |
| 14 | 0 | 0 | 0 | 12.52 |
| 15 | 0 | 0 | 0 | 13.32 |
| 16 | 0 | 0 | 0 | 12.56 |
| 17 | 0 | 0 | 0 | 12.38 |
| Source of Variance | ||||
|---|---|---|---|---|
| Sum of Squares | Degree of Freedom | F Value | p Value | |
| Model | 516.74 | 9 | 191.74 | <0.0001 ** |
| X1 | 335.79 | 1 | 1121.37 | <0.0001 ** |
| X2 | 93.50 | 1 | 312.25 | <0.0001 ** |
| X3 | 3.13 | 1 | 10.44 | 0.0144 * |
| X1 X2 | 2.91 | 1 | 9.71 | 0.0169 * |
| X1 X3 | 3.53 | 1 | 11.80 | 0.0109 * |
| X2 X3 | 1.28 | 1 | 4.26 | 0.0778 |
| 65.42 | 1 | 218.47 | <0.0001 ** | |
| 0.37 | 1 | 1.24 | 0.3026 | |
| 7.22 | 1 | 24.10 | 0.0017 ** | |
| Residual | 2.10 | 7 | ||
| Lack of fit | 1.26 | 3 | 2.03 | 0.2526 |
| Pure error | 0.83 | 4 | ||
| Cor total | 518.84 | 16 | ||
| Test Number | Film Removal Rate/% |
|---|---|
| 1 | 97.15 |
| 2 | 98.20 |
| 3 | 98.78 |
| Mean value | 98.04 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xue, S.; Chen, X.; Li, J.; Wang, X.; Zhang, Z. Design of and Experiment on a Film Removal Device of an Arc-Toothed Residual Film Recovery Machine before Sowing. Appl. Sci. 2021, 11, 8551. https://doi.org/10.3390/app11188551
Xue S, Chen X, Li J, Wang X, Zhang Z. Design of and Experiment on a Film Removal Device of an Arc-Toothed Residual Film Recovery Machine before Sowing. Applied Sciences. 2021; 11(18):8551. https://doi.org/10.3390/app11188551
Chicago/Turabian StyleXue, Shuaikang, Xuegeng Chen, Jingbin Li, Xianfei Wang, and Zhiyuan Zhang. 2021. "Design of and Experiment on a Film Removal Device of an Arc-Toothed Residual Film Recovery Machine before Sowing" Applied Sciences 11, no. 18: 8551. https://doi.org/10.3390/app11188551
APA StyleXue, S., Chen, X., Li, J., Wang, X., & Zhang, Z. (2021). Design of and Experiment on a Film Removal Device of an Arc-Toothed Residual Film Recovery Machine before Sowing. Applied Sciences, 11(18), 8551. https://doi.org/10.3390/app11188551