
An Efficient Approach for Detecting Driver Drowsiness Based on Deep Learning



Abstract
:1. Introduction
2. Background
2.1. Drowsiness
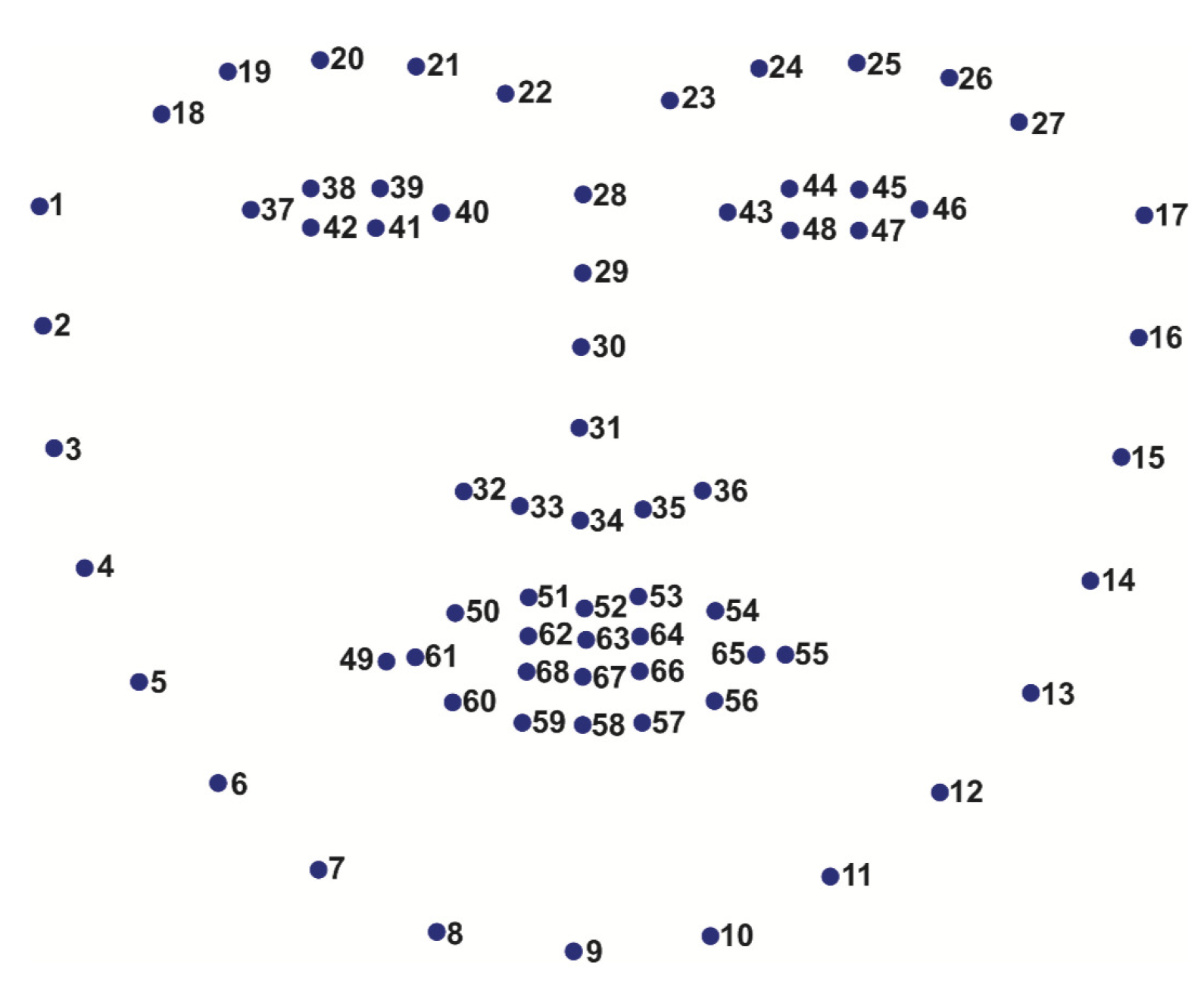
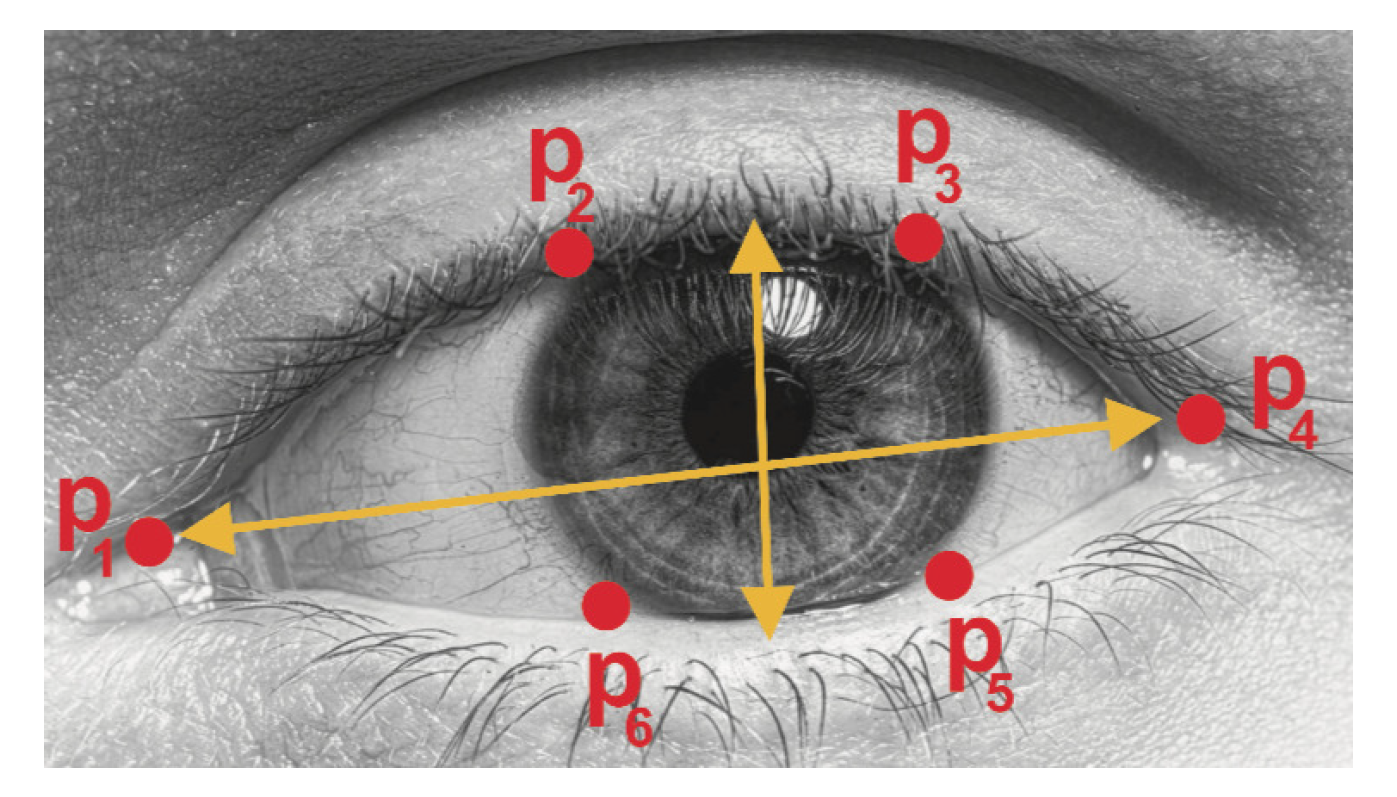
2.2. Identification of Facial Landmarks
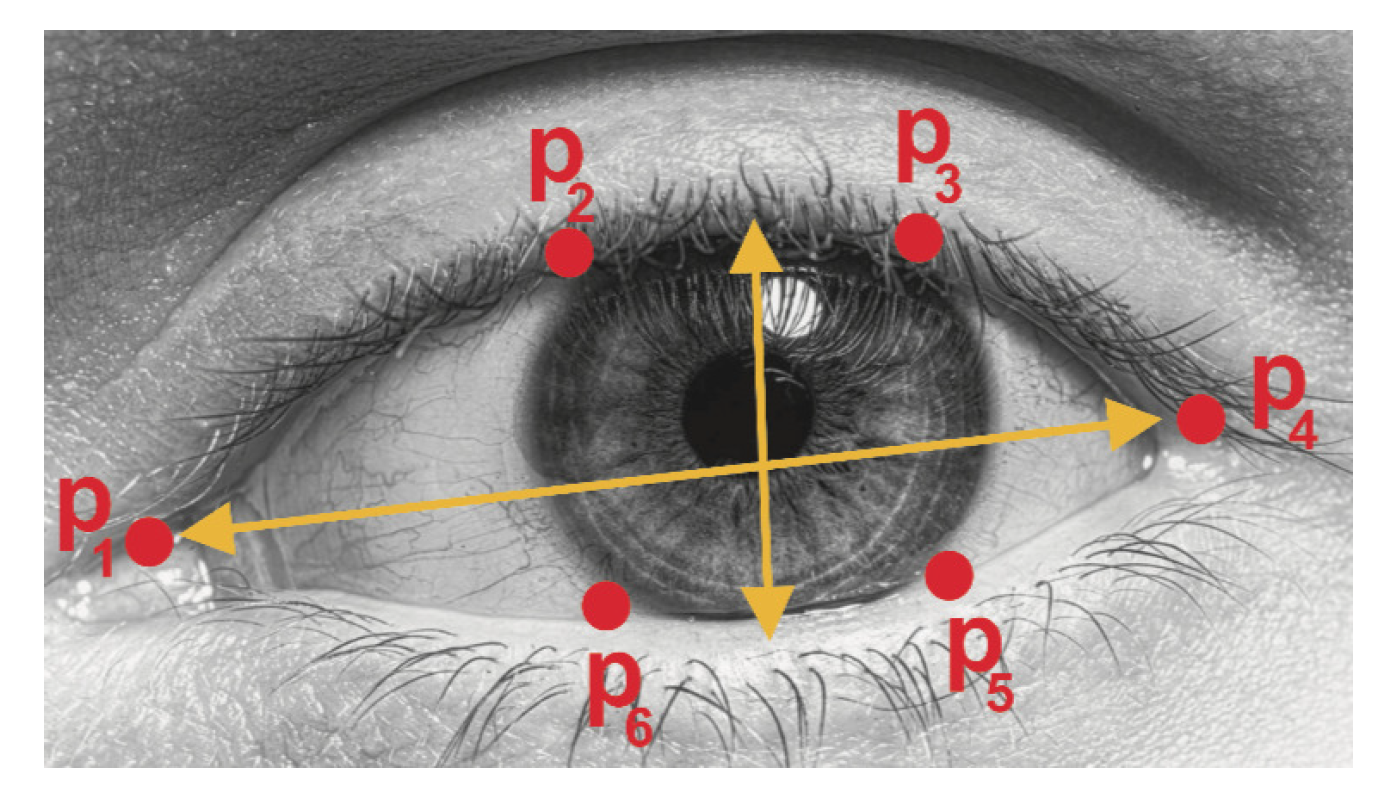
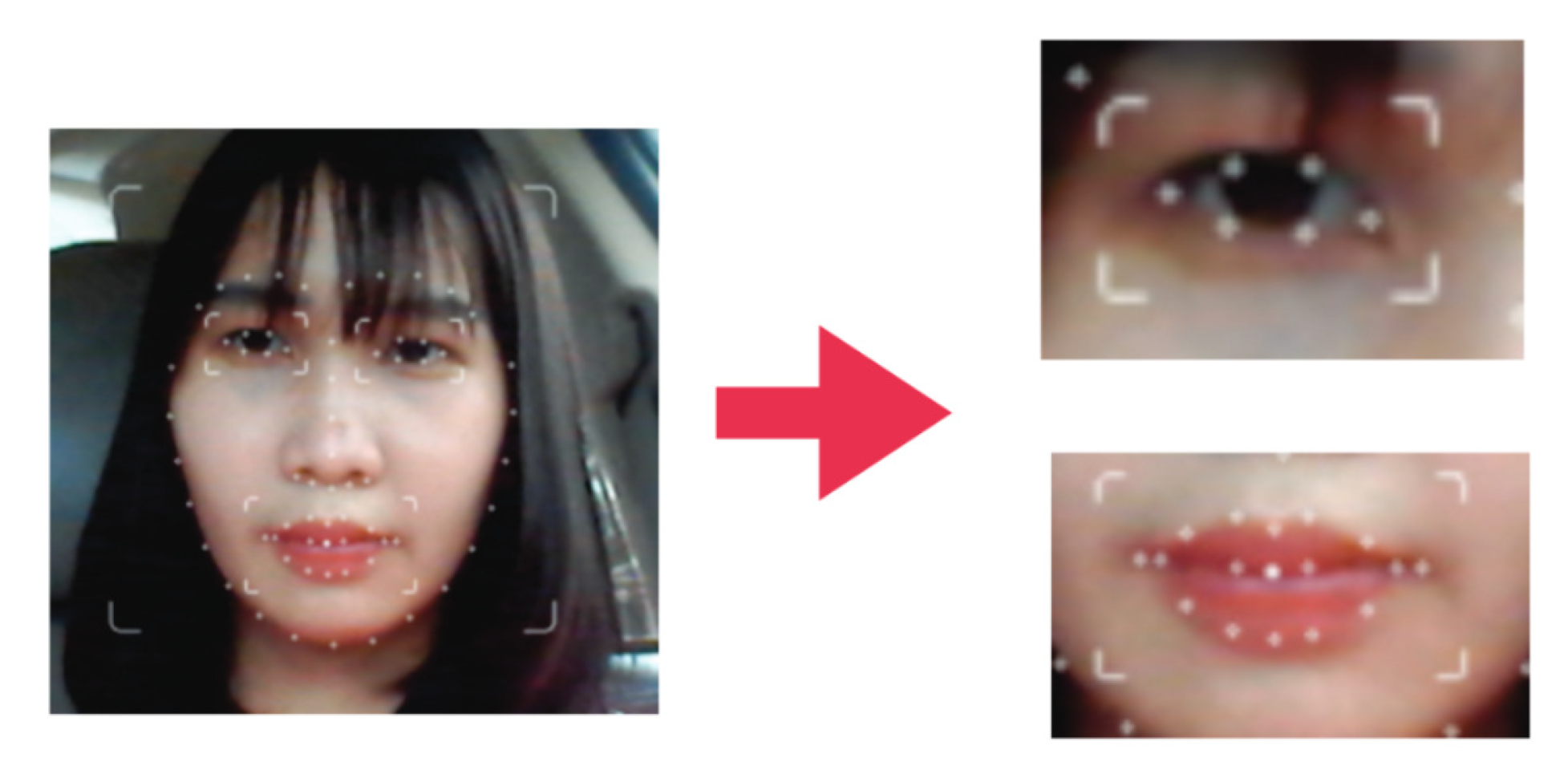
2.2.1. Blink Detection
2.2.2. Yawning Detection
2.3. Deep Neural Networks for Drowsiness Prediction
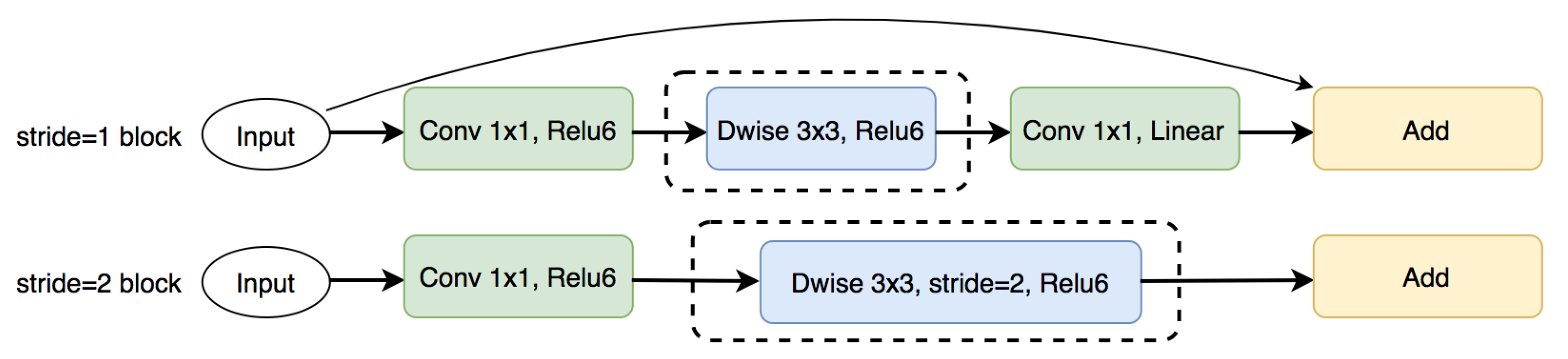
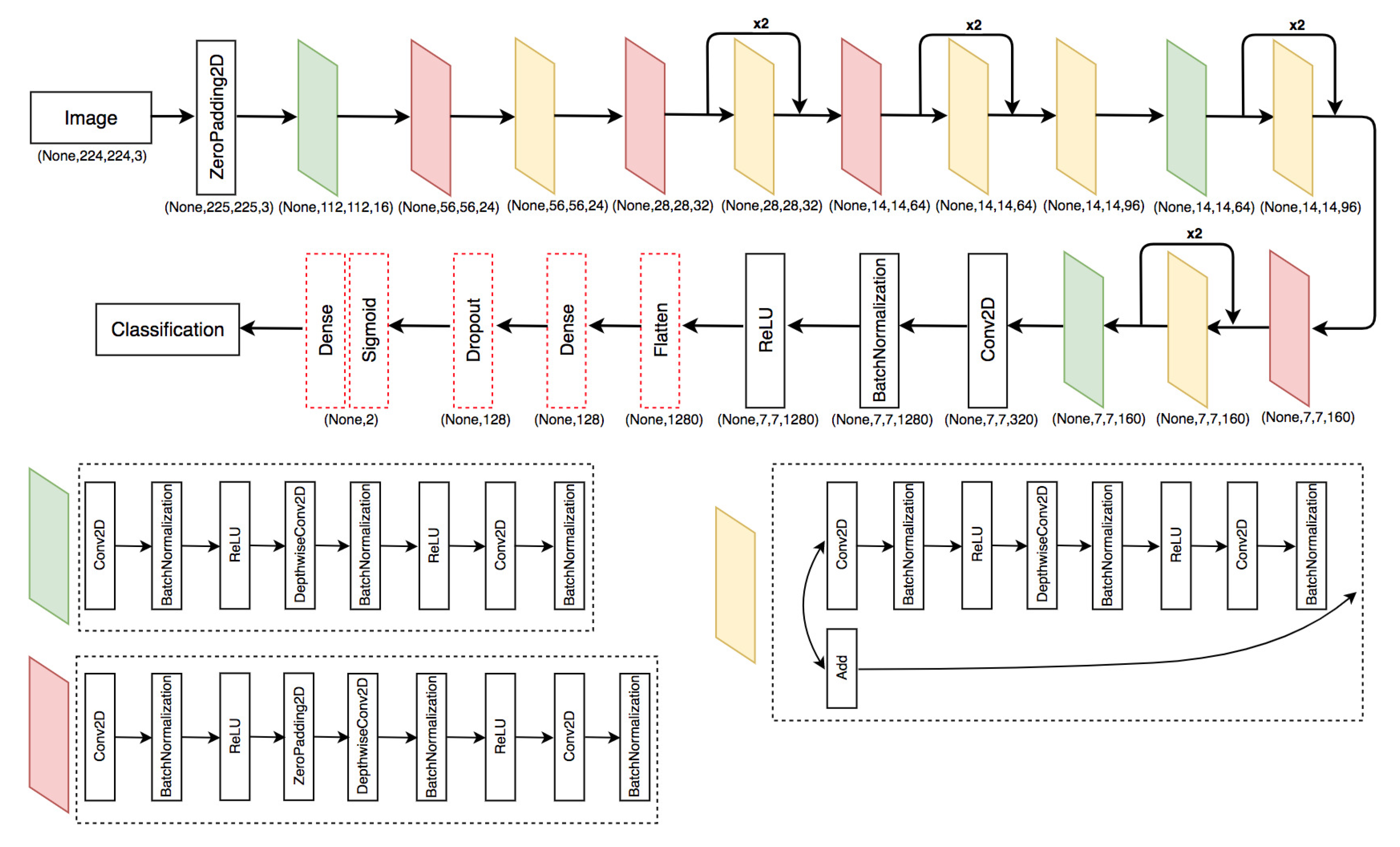
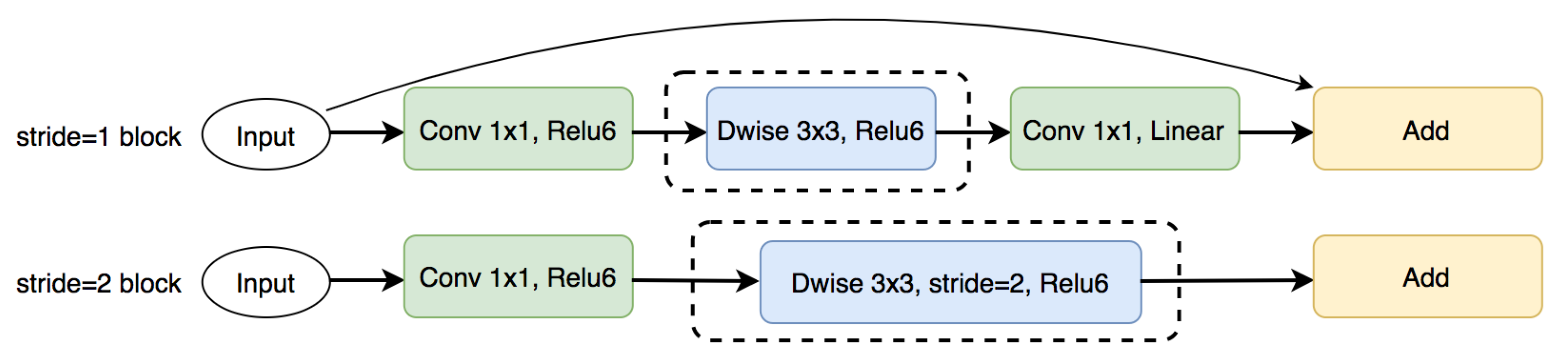
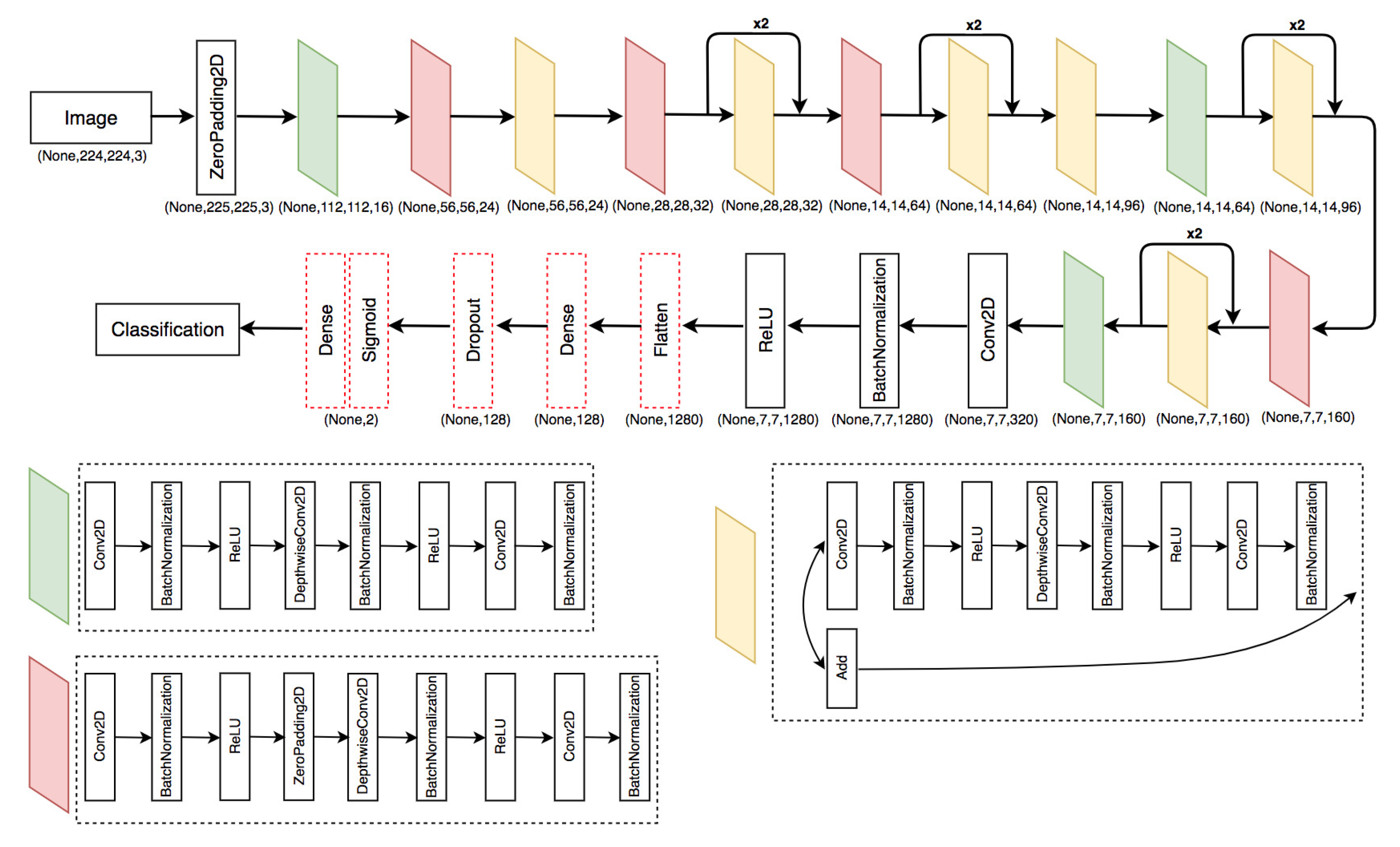
2.3.1. MobileNet-V2 Network
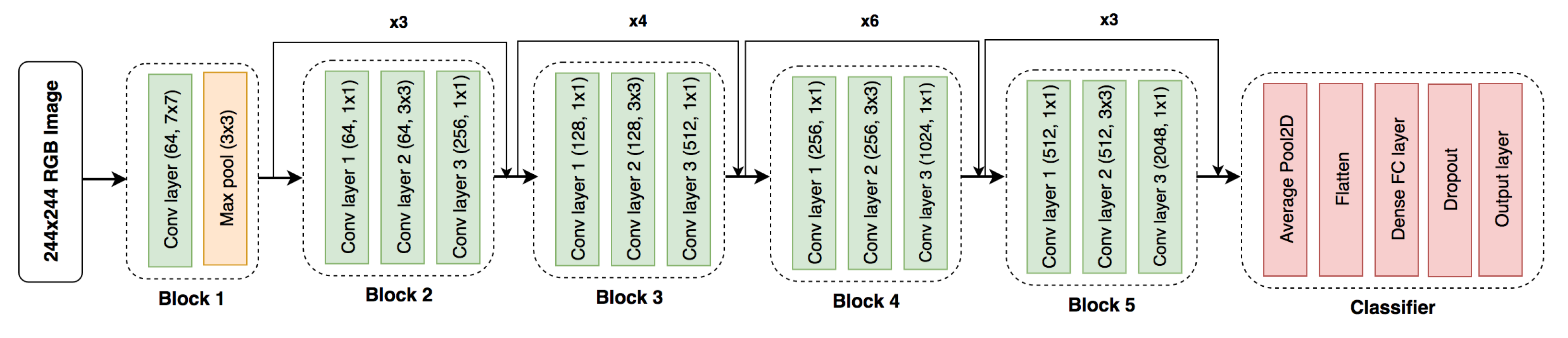
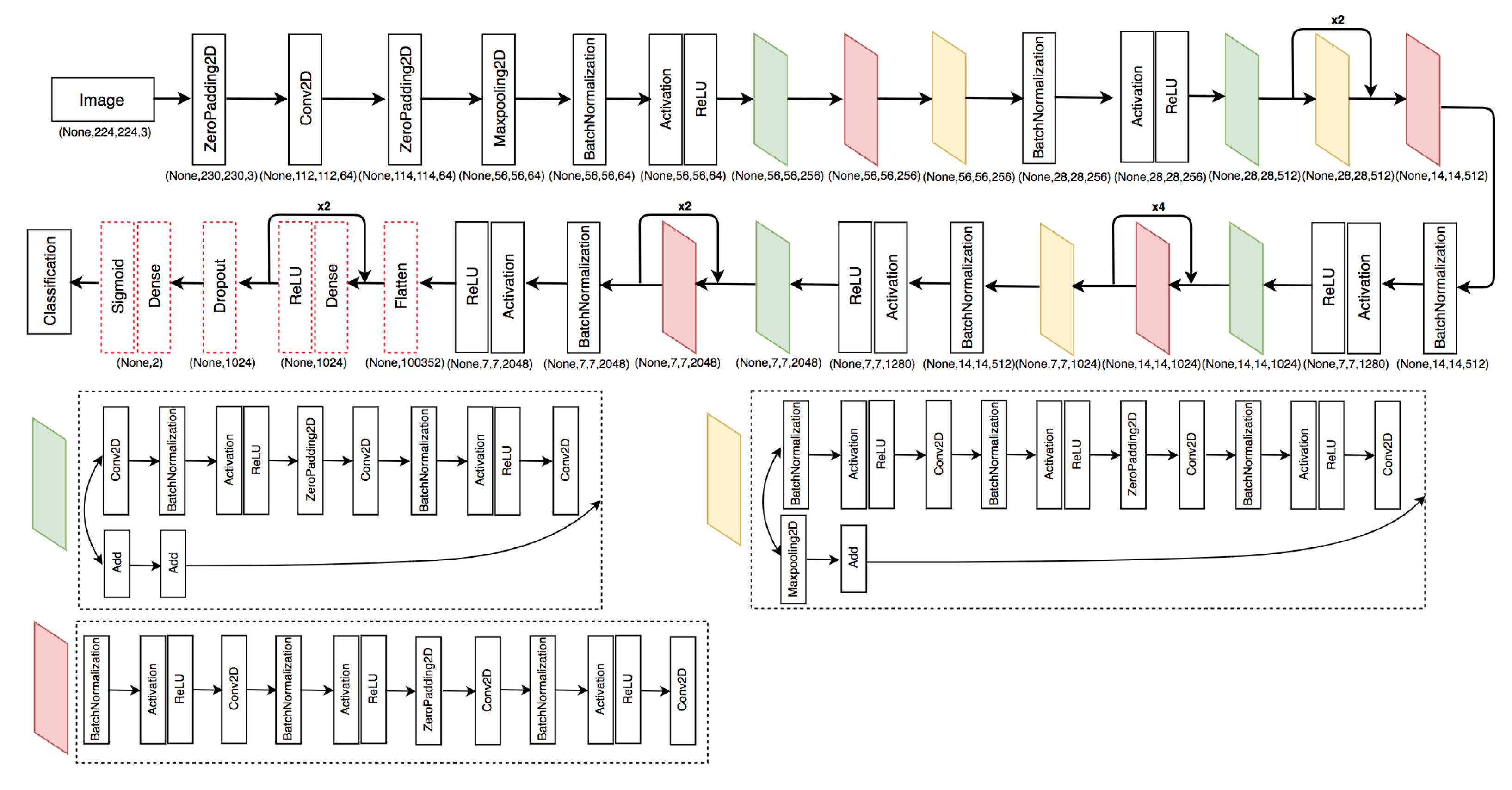
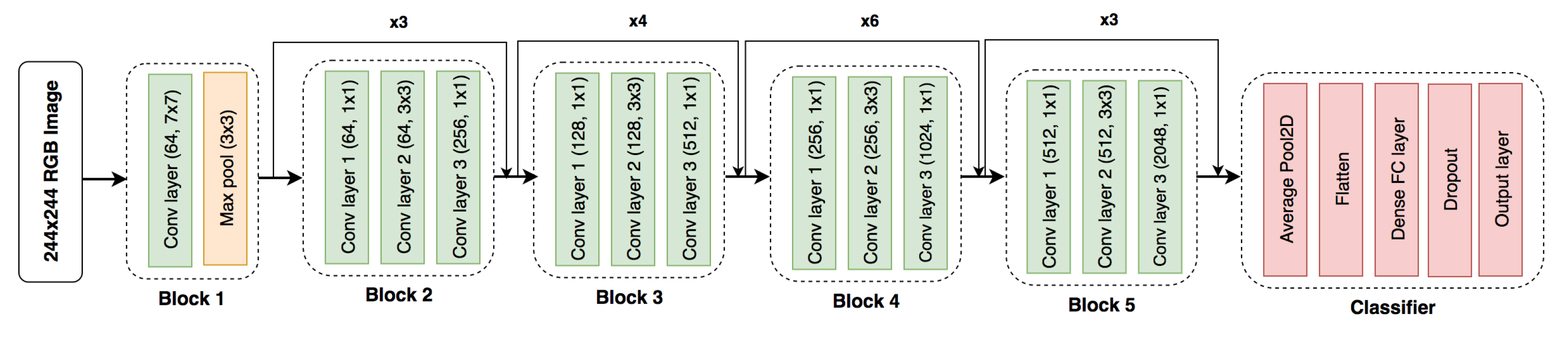
2.3.2. ResNet Network
2.4. Model Evaluation Metrics
2.4.1. Accuracy
2.4.2. Precision, Recall and F1
3. Proposed Methods
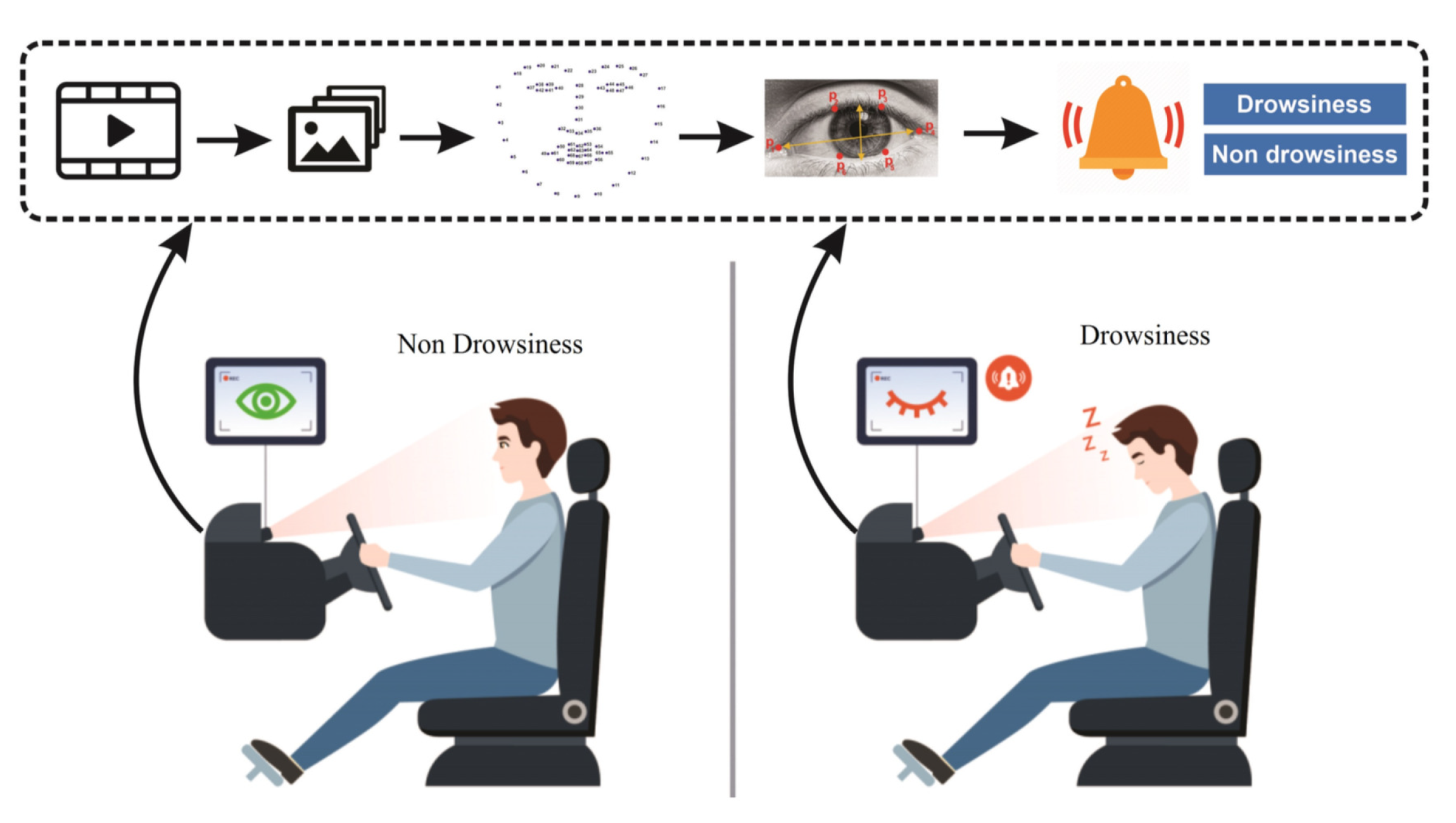
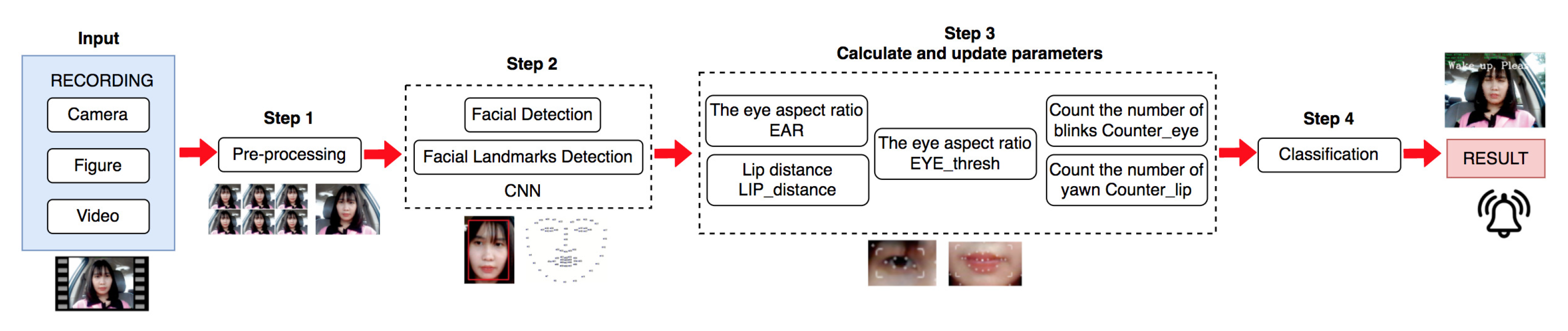
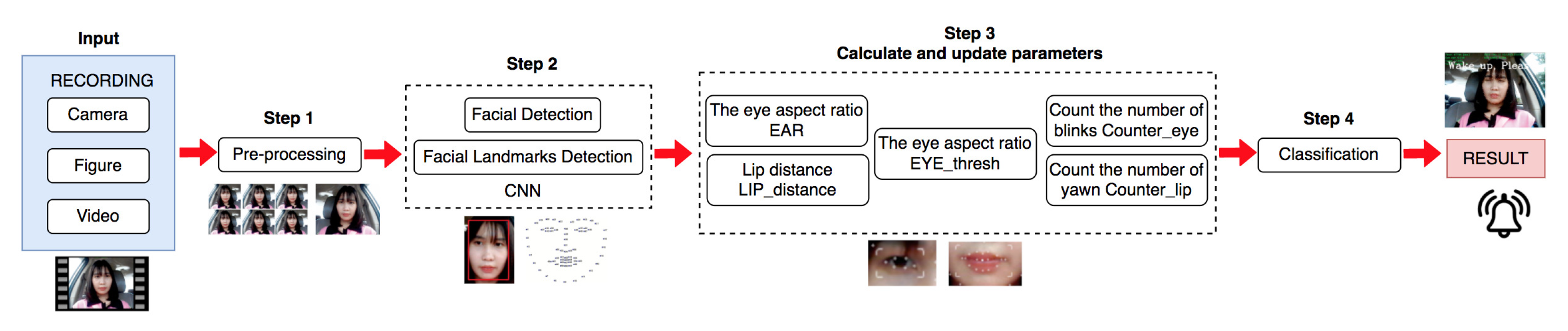
3.1. Method 1: Drowsiness Detection and Prediction Based on Facial Landmarks
3.1.1. Step 1: Pre-Processing
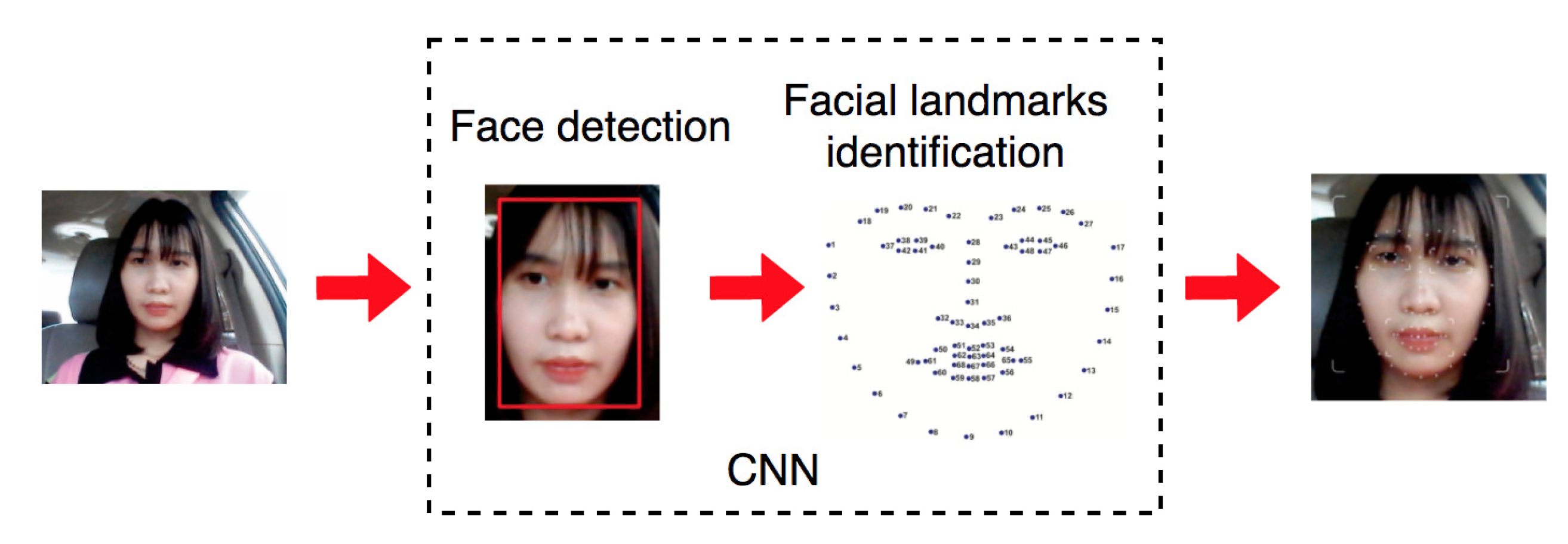
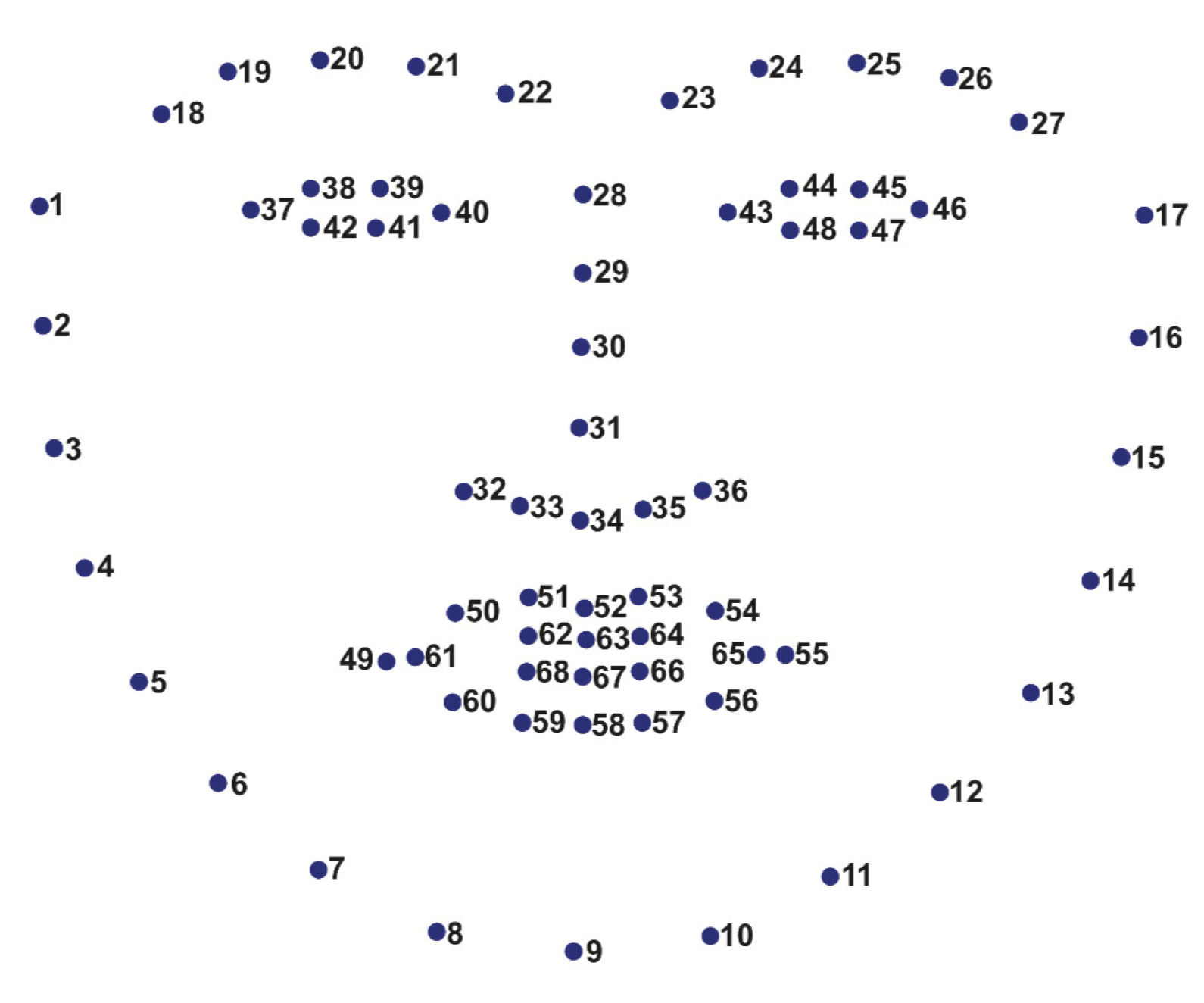
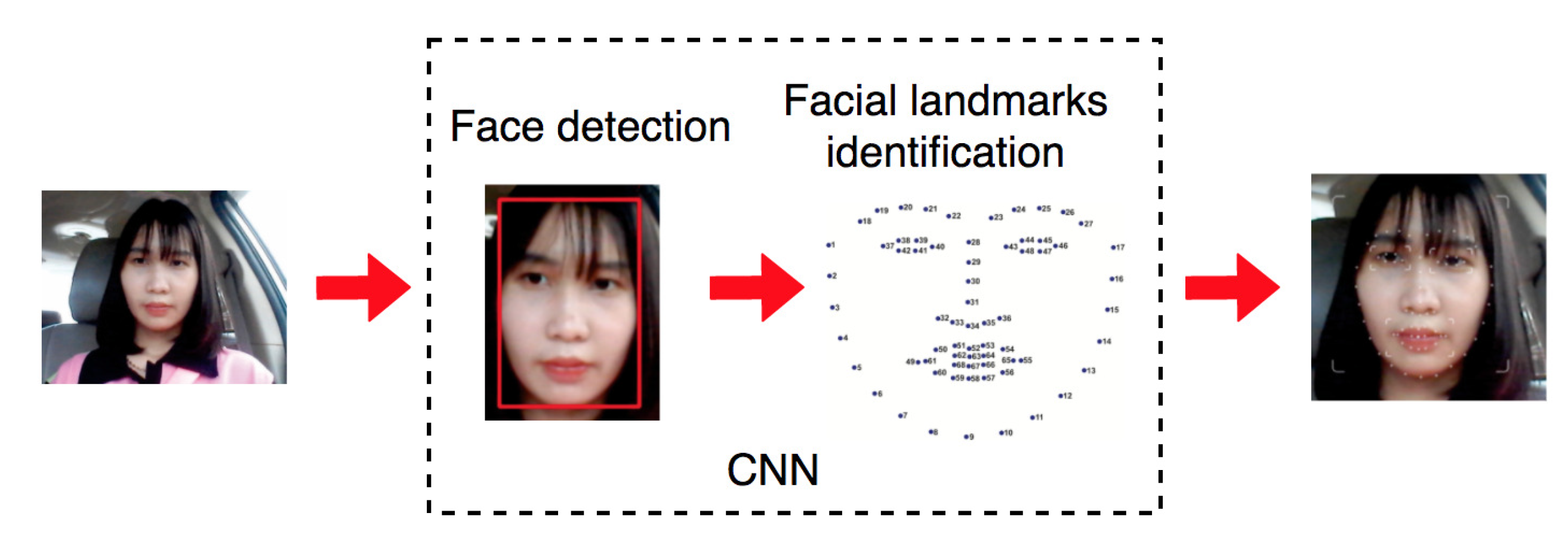
3.1.2. Step 2: Detection of Facial Landmarks
3.1.3. Step 3: Determination of the Eye-Opening Threshold for Each Driver
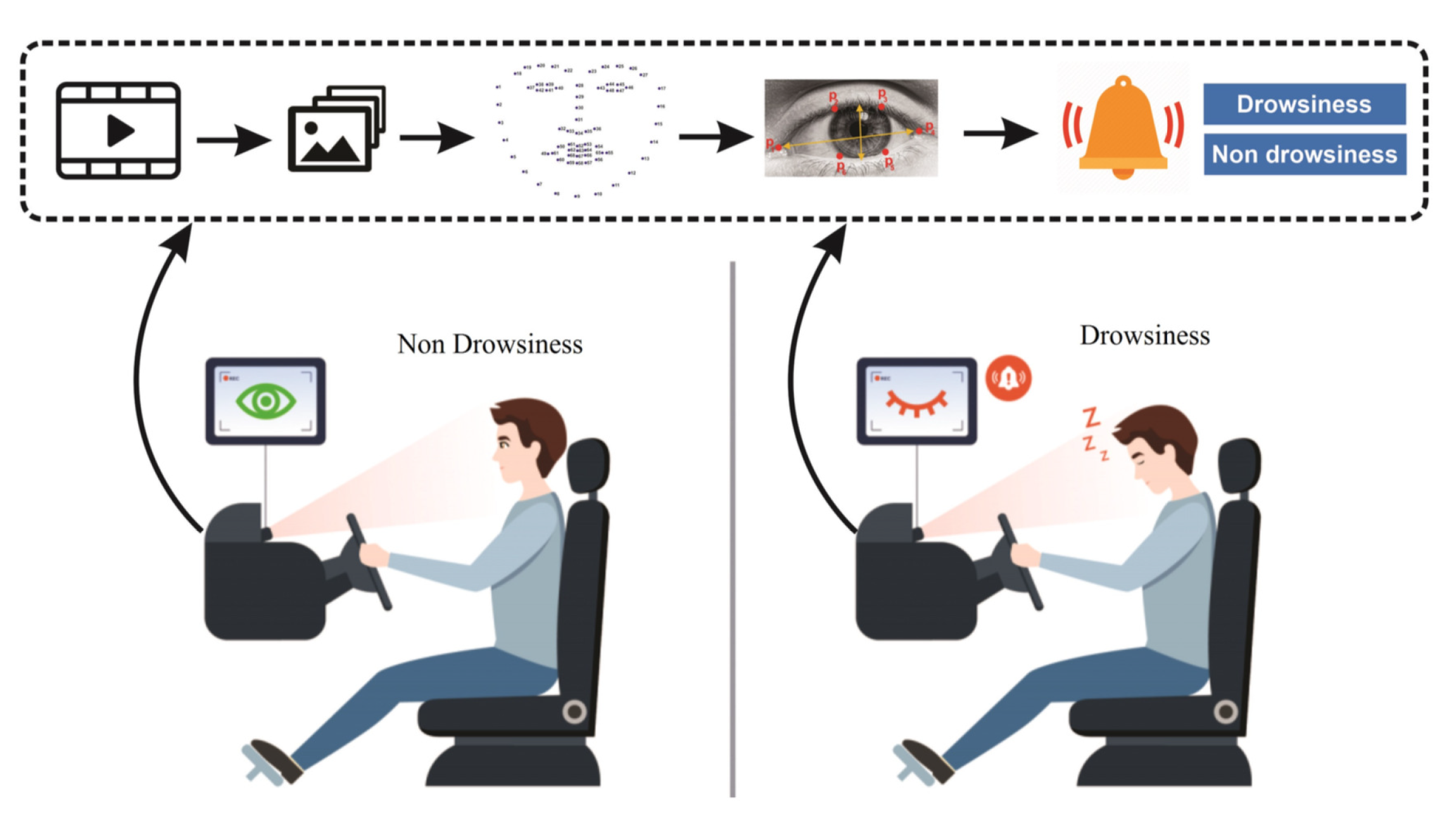
3.1.4. Step 4: Drowsiness Detection and Prediction
| Algorithm 1 Drowsiness Detection and Prediction |
| Input: Input video monitored from a camera |
| Output: Drowsiness_Detection = True/False (state of drowsiness or non-drowsiness) |
| Begin |
| ▹ video is split into clips with lengths of 300 s |
| for each clip in video do |
| ▹ initialize variables to count blinks and yawns respectively. |
| = False; |
| for each do ▹ n is the number of image frames extracted from clip |
| Calculate by Equation (1); |
| Calculate by Equation (2); |
| end for |
| ▹ compute an adaptive eye-opening threshold for each driver |
| Calculate ; |
| for each do ▹ Count blinks and yawns |
| if then |
| += 1 ; |
| end if |
| if then |
| += 1; |
| end if |
| end for |
| ▹ and are thresholds of blinks and yawns |
| if then |
| = True; ▹ Turn on a driver drowsiness alarm: Wake up, please! |
| end if |
| if then |
| = True; ▹ Turn on a driver drowsiness alarm: Wake up, please! |
| end if |
| end for |
| End. |
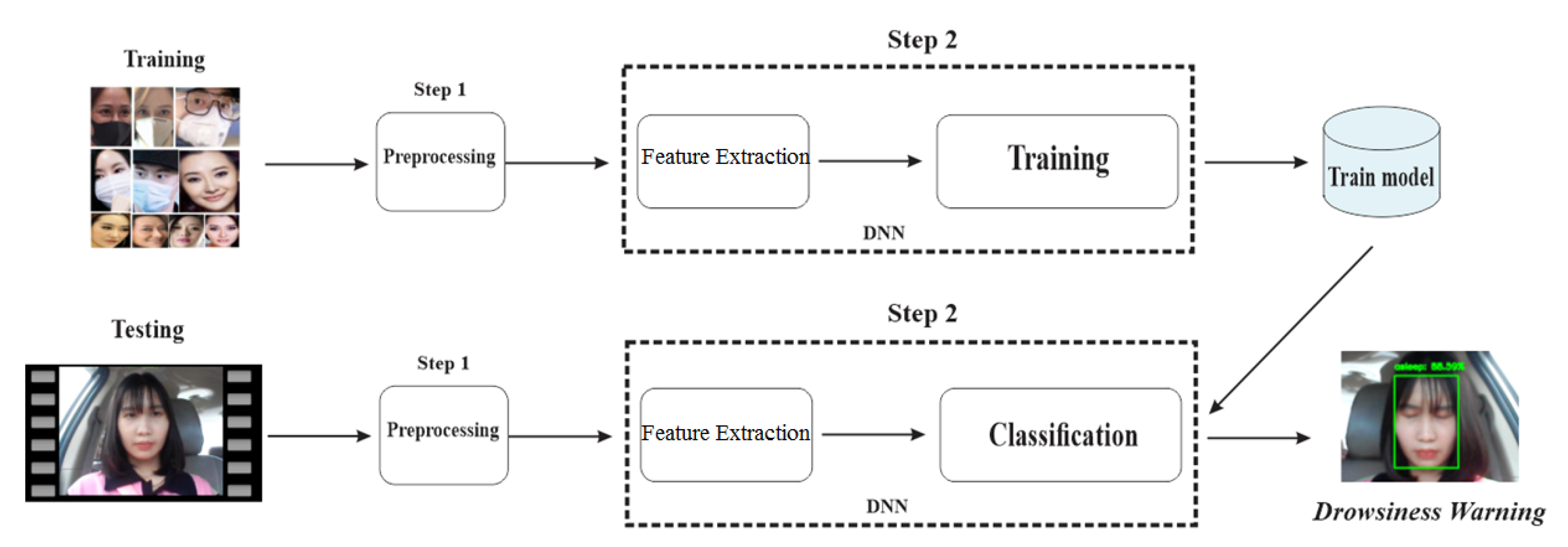
3.2. Method 2: Drowsiness Detection and Prediction Using Deep Learning
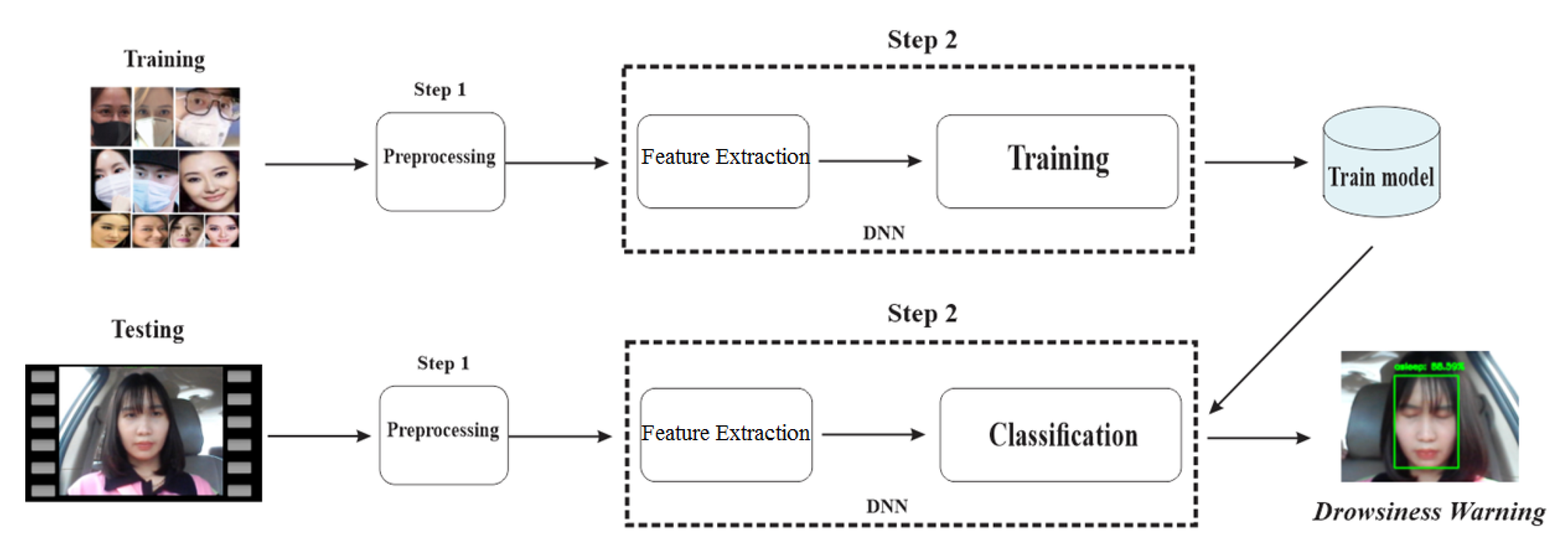
3.2.1. Phase 1: Training
Step 1: Pre-Processing
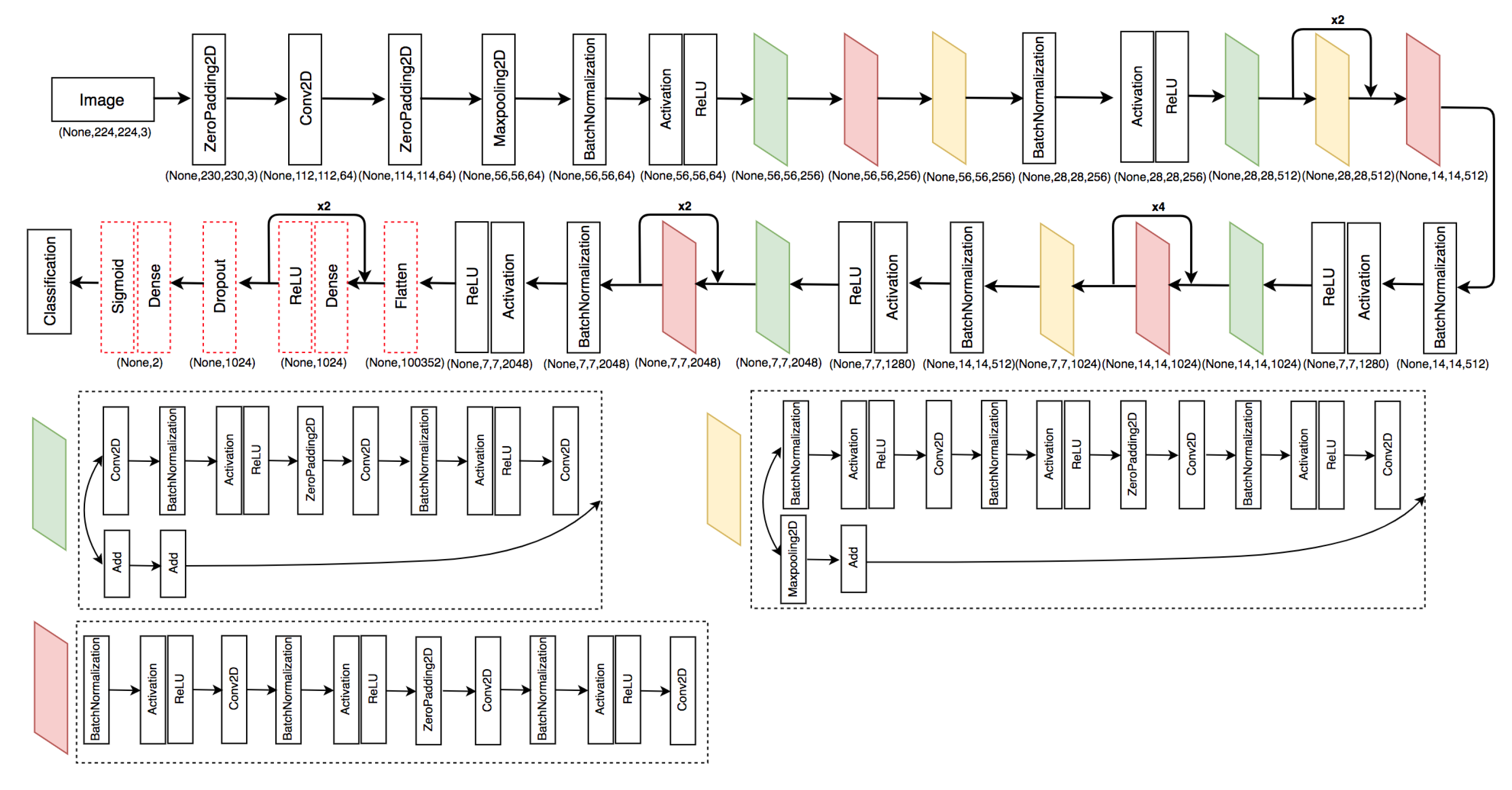
Step 2: Feature Extraction and Training
3.2.2. Phase 2: Testing
4. Experiments
4.1. Dataset and Installation Environment
4.1.1. Dataset Description
4.1.2. Installation Environment
4.2. Scenarios and Parameters
4.2.1. Scenarios
4.2.2. Experimental Parameters
4.3. Experimental Results
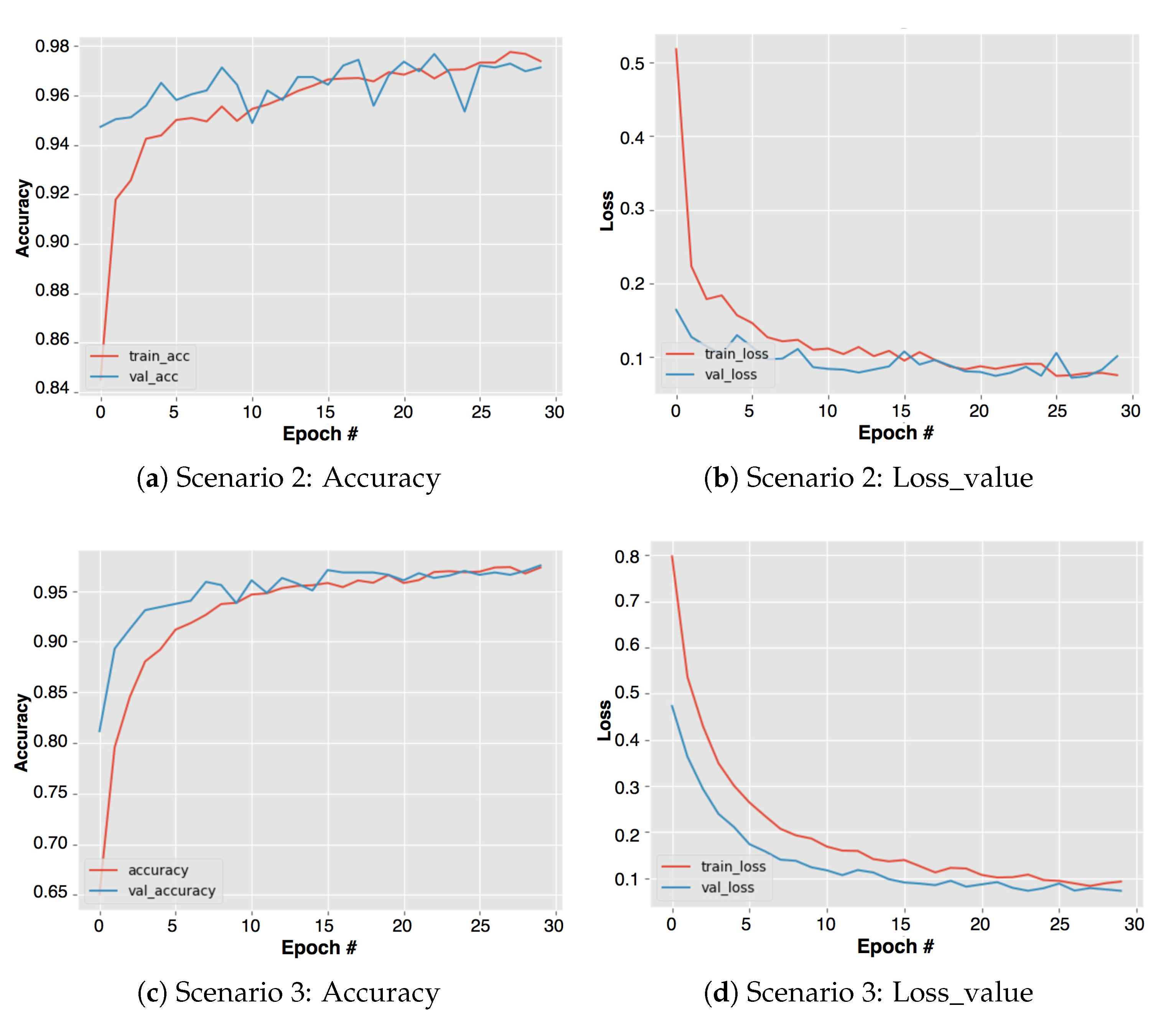
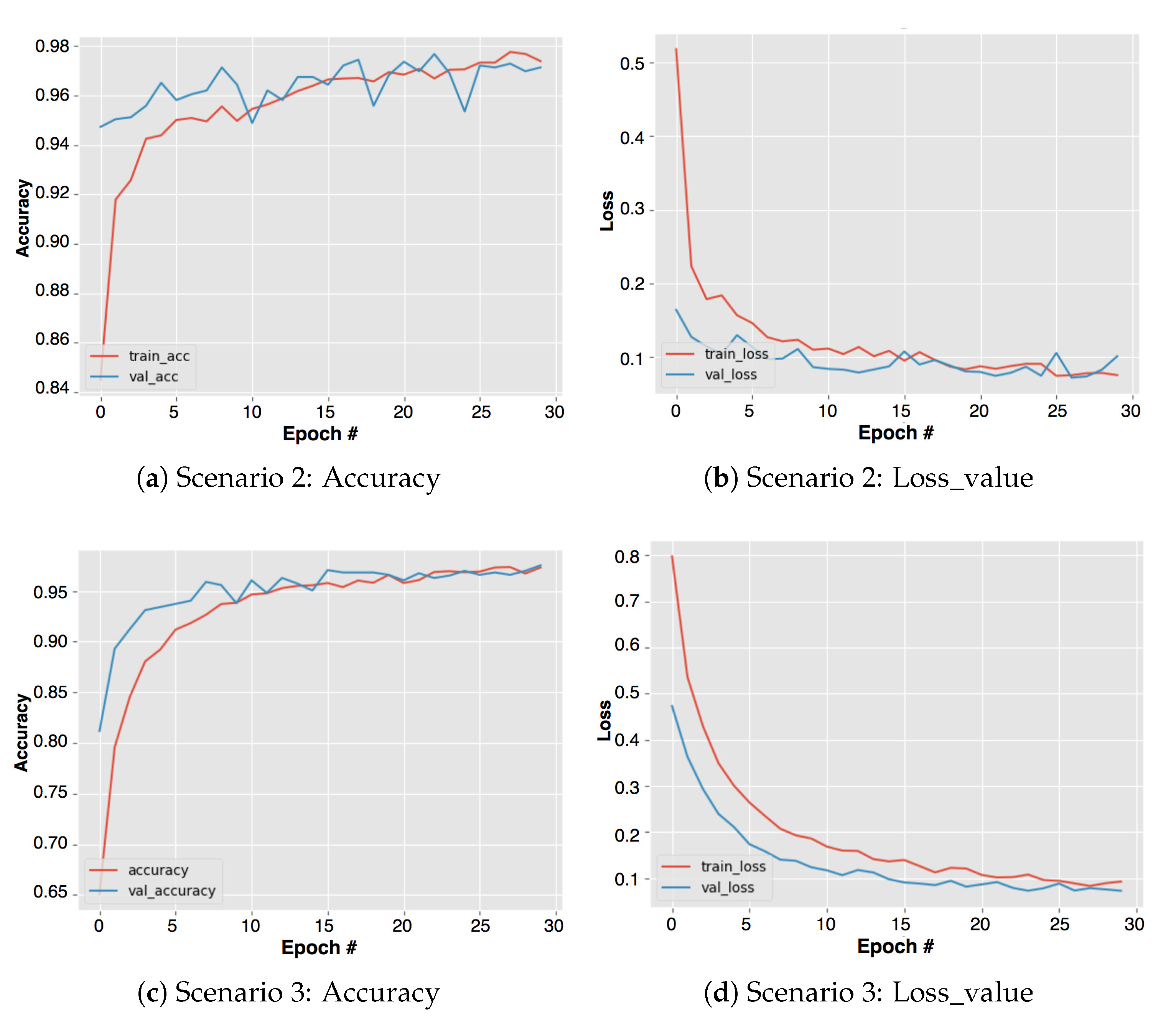
4.3.1. Training Model Evaluation
Metrics of Precision, Recall, and Accuracy
Metrics of Loss_Value
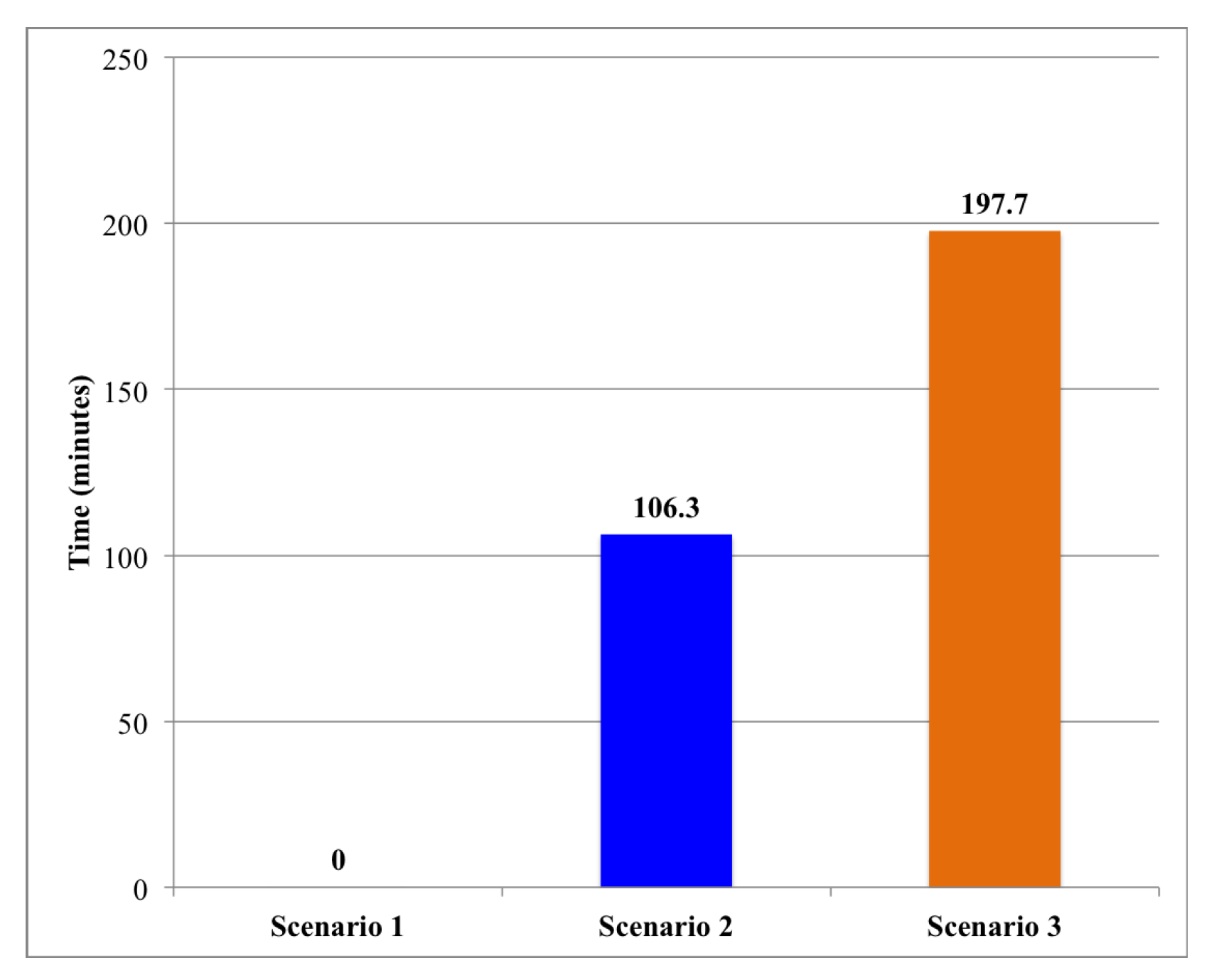
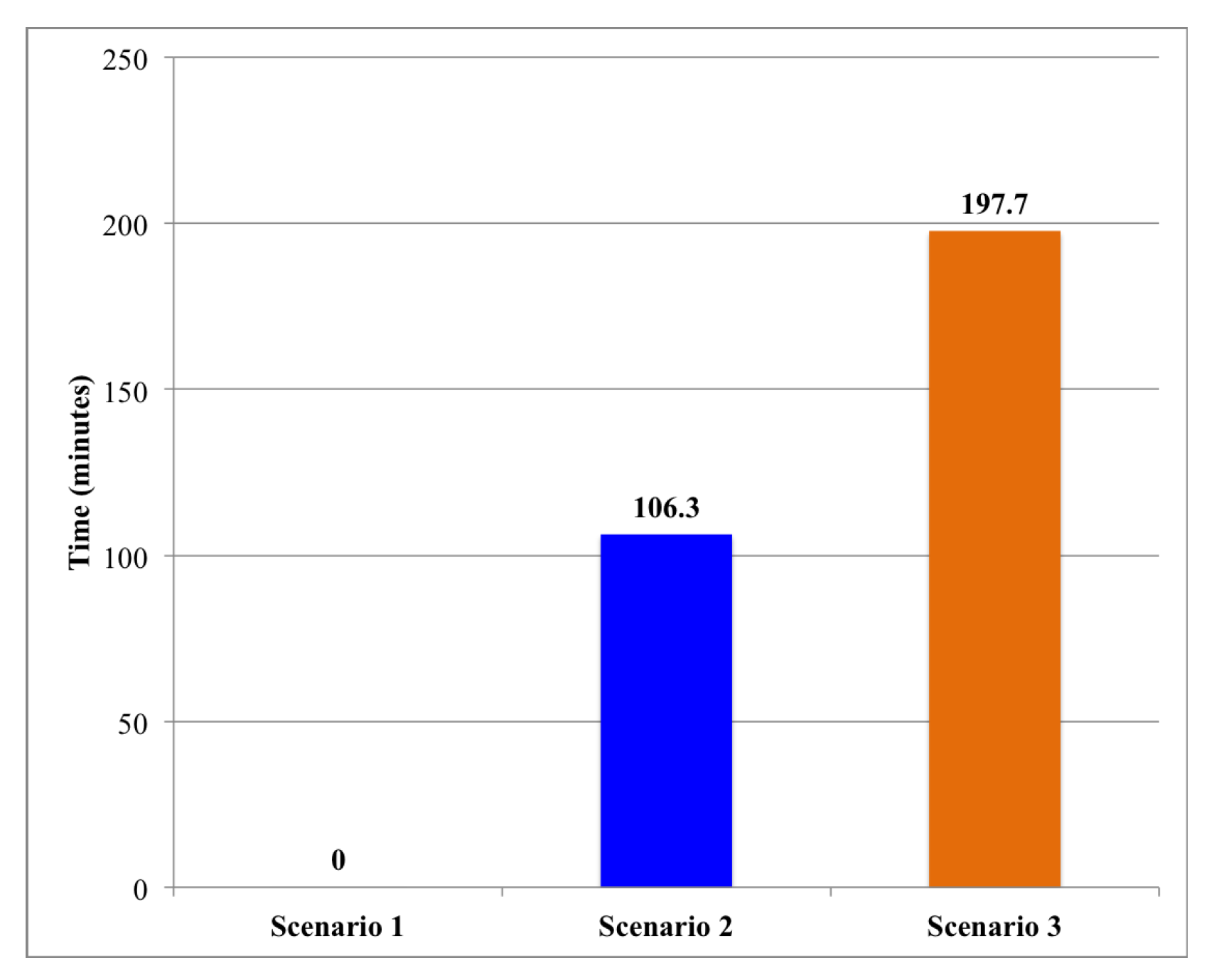
Training Time
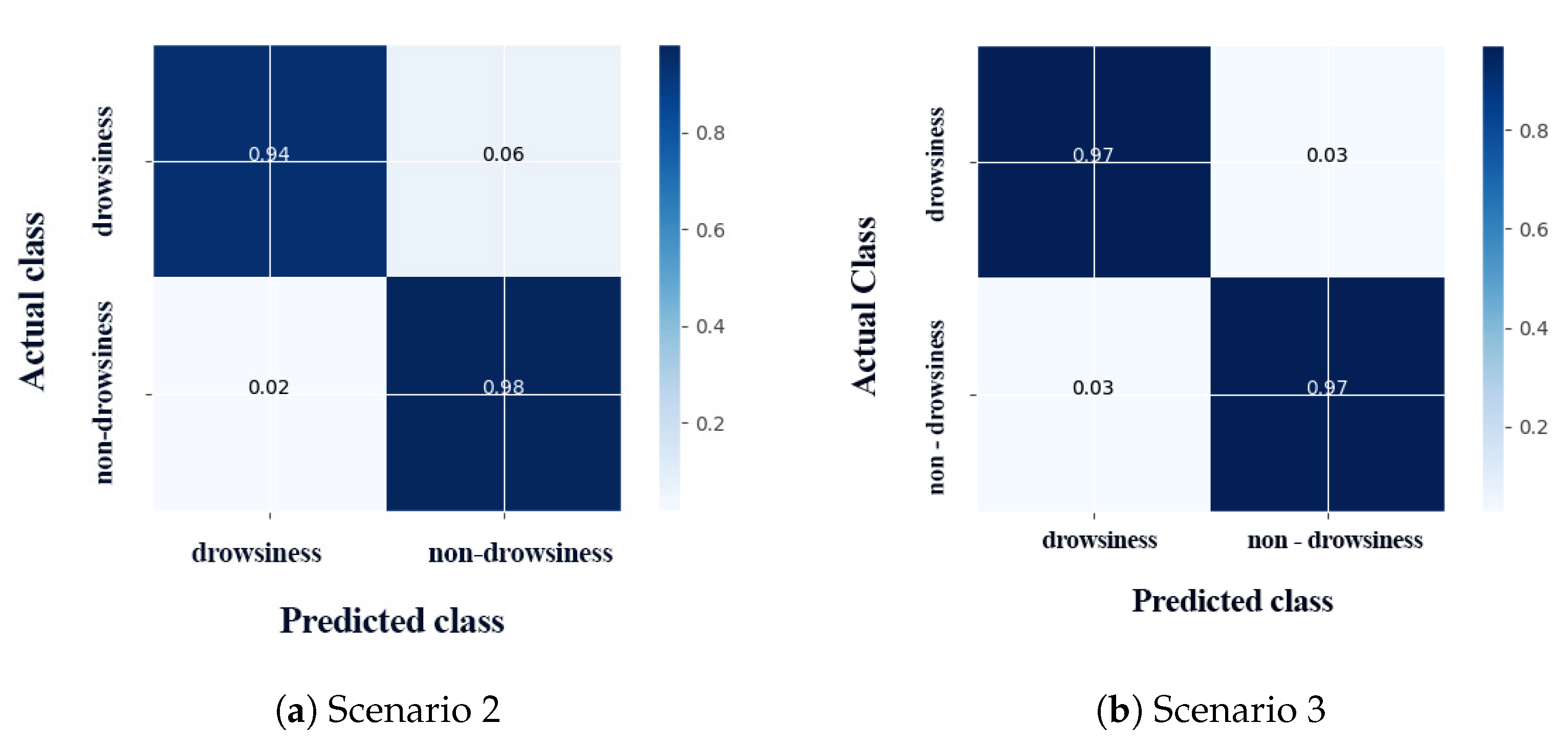
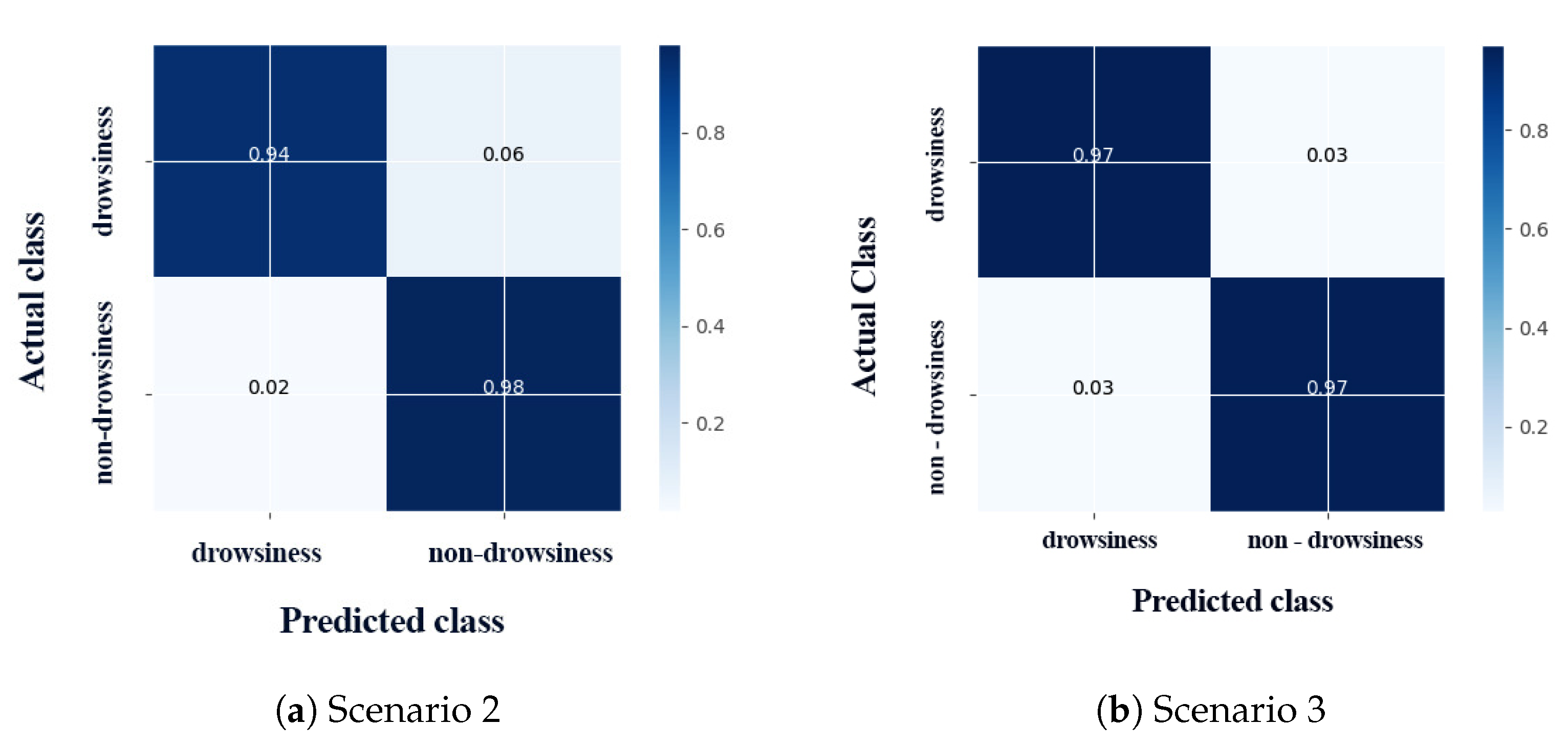
4.3.2. Testing Results
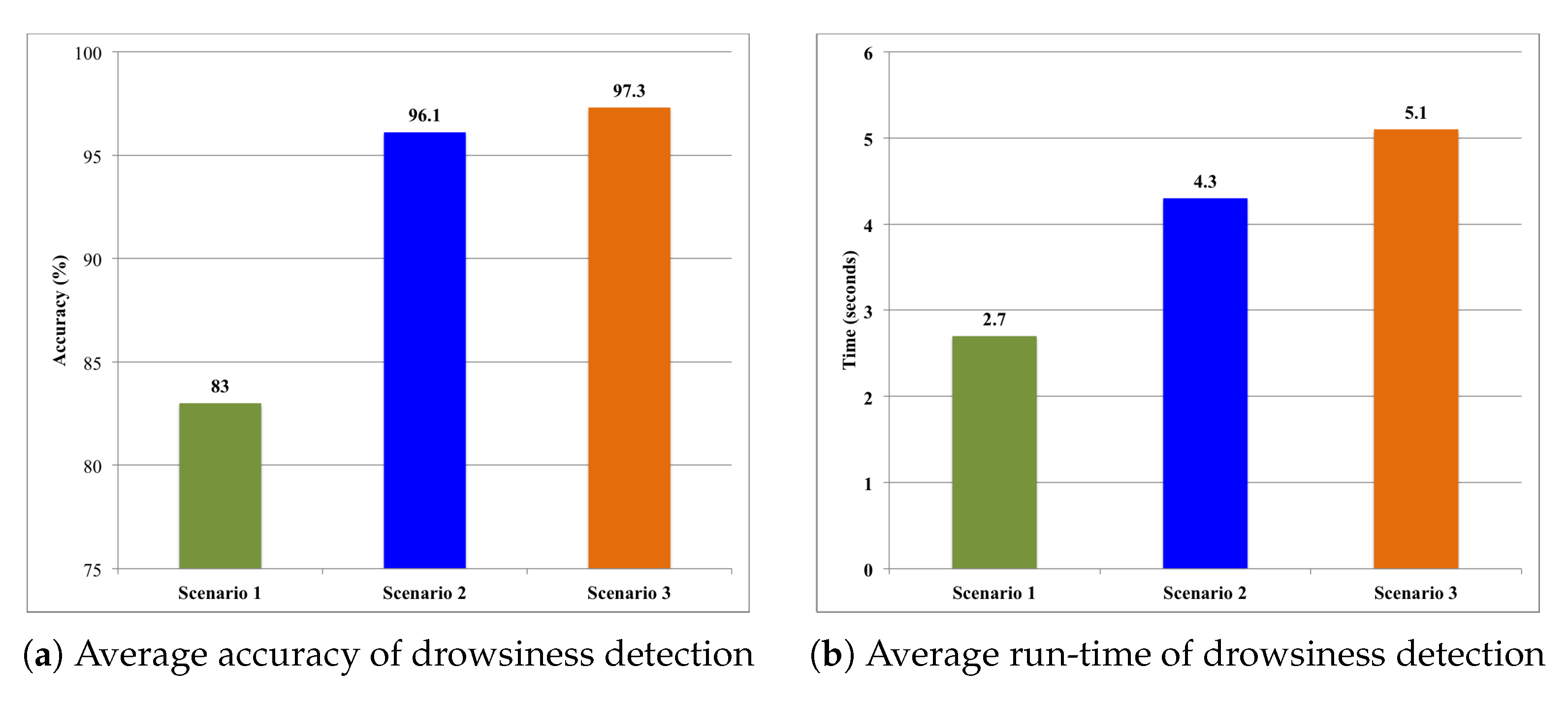
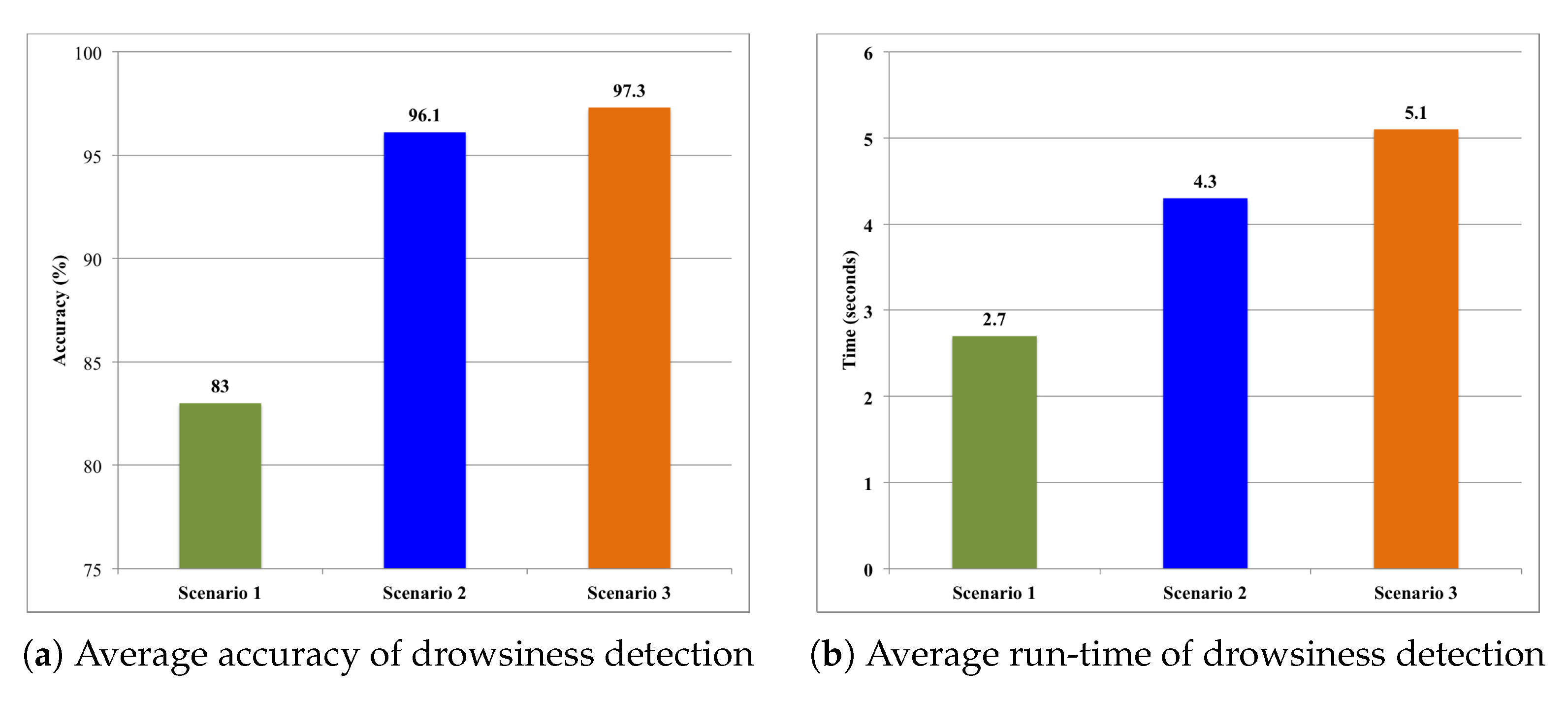
4.3.3. Drowsiness Detection and Prediction
4.3.4. Comparison and Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Morgenthaler, T.I.; Lee-Chiong, T.; Alessi, C.; Friedman, L.; Aurora, R.N.; Boehlecke, B.; Brown, T.; Chesson, A.L., Jr.; Kapur, V.; Maganti, R.; et al. Practice parameters for the clinical evaluation and treatment of circadian rhythm sleep disorders. Sleep 2007, 30, 1445–1459. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marjorie, V.; Heather, M.E.; Neil, J.D. Sleepiness and sleep-related accidents in commercial bus drivers. Sleep Breath. 2009, 14, 39–42. [Google Scholar]
- Jabbar, R.; Al-Khalifa, K.; Kharbeche, M.; Alhajyaseen, W.K.M.; Jafari, M.; Jiang, S. Real-time Driver Drowsiness Detection for Android Application Using Deep Neural Networks Techniques. Procedia Comput. Sci. 2018, 130, 400–407. [Google Scholar] [CrossRef]
- Chellappa, A.; Reddy, M.S.; Ezhilarasie, R.; Suguna, S.K.; Umamakeswari, A. Fatigue Detection Using Raspberry Pi 3. Int. J. Eng. Technol. 2018, 7, 29–32. [Google Scholar] [CrossRef] [Green Version]
- Mohana, B.; Sheela Rani, C.M. Drowsiness Detection Based on Eye Closure and Yawning Detection. Int. J. Recent Technol. Eng. 2019, 8, 1–13. [Google Scholar]
- Wong, J.Y.; Lau, P.Y. Real-Time Driver Alert System Using Raspberry Pi. ECTI Trans. Electr. Eng. Electron. Commun. 2019, 17, 193–203. [Google Scholar] [CrossRef]
- Ramos, A.L.A.; Erandio, J.C.; Mangilaya, D.H.T.; Carmen, N.D.; Enteria, E.M.; Enriquez, L.J. Driver Drowsiness Detection Based on Eye Movement and Yawning Using Facial Landmark Analysis. Int. J. Simul. Syst. Sci. Technol. 2019, 20, 1–8. [Google Scholar] [CrossRef]
- Mehta, S.; Dadhich, S.; Gumber, S.; Bhatt, A.J. Real-Time Driver Drowsiness Detection System Using Eye Aspect Ratio and Eye Closure Ratio. In Proceedings of the International Conference on Sustainable Computing in Science, Technology and Management (SUSCOM), Jaipur, India, 26–28 February 2019; pp. 1333–1339. [Google Scholar]
- Sheth, S.; Singhal, A.; Ramalingam, V.V. Driver Drowsiness Detection System using Machine Learning Algorithms. Int. J. Recent Technol. Eng. 2020, 8, 990–993. [Google Scholar]
- Jabbar, R.; Shinoy, M.; Kharbeche, M.; Al-Khalifa, K.; Krichen, M.; Barkaoui, K. Driver Drowsiness Detection Model Using Convolutional Neural Networks Techniques for Android Application. In Proceedings of the 2020 IEEE International Conference on Informatics, IoT, and Enabling Technologies, Doha, Qatar, 2–5 February 2020. [Google Scholar]
- Zhao, Z.; Zhou, N.; Zhang, L.; Yan, H.; Xu, Y.; Zhang, Z. Driver Fatigue Detection Based on Convolutional Neural Networks Using EM-CNN. Comput. Intell. Neurosci. 2020, 2020, 7251280. [Google Scholar] [CrossRef] [PubMed]
- Biswal, A.K.; Singh, D.; Pattanayak, B.K.; Samanta, D.; Yang, M.H. IoT-Based Smart Alert System for Drowsy Driver Detection. Wirel. Commun. Mob. Comput. 2021, 2021, 1–13. [Google Scholar] [CrossRef]
- Ajinkya Rajkar, N.K.; Raut, A. Driver Drowsiness Detection Using Deep Learning. In Applied Information Processing Systems: Proceedings of ICCET 2021; Springer: Singapore, 2021; pp. 73–82. [Google Scholar]
- Tibrewal, M.; Srivastava, A.; Kayalvizhi, R. A Deep Learning Approach To Detect Driver Drowsiness. Int. J. Eng. Res. Technol. 2021, 10, 183–189. [Google Scholar]
- Kingman, P.S.; Jesse, B.; Forrest, C.; Kate, G.; James, K.; Roger, K.; Anne, T.M.; Sharon, L.M.; Allan, I.P.; Susan, R.; et al. Drowsy driving and automobile crashes. In Ncsdr/nhtsa Expert Panel on Driver Fatigue and Sleepiness; National Highway Traffic Safety Administration: Rockville, MD, USA, 1999. [Google Scholar]
- Kazemi, V.; Sullivan, J. One millisecond face alignment with an ensemble of regression trees. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Columbus, OH, USA, 23–28 June 2014; pp. 1867–1874. [Google Scholar]
- Sagonas, C.; Tzimiropoulos, G.; Zafeiriou, S.; Pantic, M. 300 faces in-the-wild challenge: The first facial landmark localization challenge. In Proceedings of the IEEE International Conference on Computer Vision Workshops, Sydney, Australia, 3–8 December 2013; pp. 397–403. [Google Scholar]
- Cech, J.; Soukupova, T. Real-time eye blink detection using facial landmarks. In Proceedings of the 21st Computer Vision Winter Workshop, Rimske Toplice, Slovenia, 3–5 February 2016; pp. 1–8. [Google Scholar]
- Kumar, C.P.; Thamanam, S.; Karthik, M.; Likitha, S. Driver Drowsiness Monitoring System Using Visual Behavior and Machine Learning. Ann. Rom. Soc. Cell Biol. 2021, 25, 19969–19977. [Google Scholar]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. Mobilenets: Efficient convolutional neural networks for mobile vision applications. arXiv 2017, arXiv:1704.04861. [Google Scholar]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. Mobilenetv2: Inverted residuals and linear bottlenecks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–23 June 2018; pp. 4510–4520. [Google Scholar]
- Xiang, Q.; Wang, X.; Li, R.; Zhang, G.; Lai, J.; Hu, Q. Fruit image classification based on Mobilenetv2 with transfer learning technique. In Proceedings of the 3rd International Conference on Computer Science and Application Engineering, Sanya, China, 22–24 October 2019; pp. 1–7. [Google Scholar]
- Dai, W.; Dai, Y.; Hirota, K.; Jia, Z. A Flower Classification Approach with MobileNetV2 and Transfer Learning. In Proceedings of the 9th International Symposium on Computational Intelligence and Industrial Applications (ISCIIA2020), Beijing, China, 31 October–3 November 2020. [Google Scholar]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep residual learning for image recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 770–778. [Google Scholar]
- Rahimzadeh, M.; Attar, A. A modified deep convolutional neural network for detecting COVID-19 and pneumonia from chest X-ray images based on the concatenation of Xception and ResNet50V2. Inform. Med. Unlocked 2020, 19, 100360. [Google Scholar] [CrossRef] [PubMed]
- Joshi, R. Accuracy, precision, recall & f1 score: Interpretation of performance measures. Retrieved April 2016, 1, 2016. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Actual Class | P—Positive | N—Negative | |
|---|---|---|---|
| Predicted Class | |||
| P—Positive | TP | FP | |
| N—Negative | FN | TN | |
| Status | Type | Number | Num Faces | Size |
|---|---|---|---|---|
| Drowsy | Image | 2659 | 2659 | 229 MB |
| Non-drowsy | Image | 3789 | 3789 | 64 MB |
| Both | Video | 21 | 10,129 | 1316 MB |
| Scenario | Method | Technique of Feature Extraction and Prediction |
|---|---|---|
| 1 | 1 | Facial landmarks |
| 2 | 2 | Adaptive deep neural network developed from MobileNet-V2 |
| 3 | 2 | Adaptive deep neural network developed from ResNet-50V2 |
| Scenario | Time (s) | |||||
|---|---|---|---|---|---|---|
| 1 | 60 | 0 | 25 | 0 | 15 | 300 |
| Scenario | Batch Size | Learning Rate | Epoch | Score Converter | Image Size | Additional Layers | Removed Layers |
|---|---|---|---|---|---|---|---|
| 2 | 30 | 1 × | 30 | sigmoid | 224 × 224 | Densen (Relu) Dropout (0.5) Dense (Sigmoid) | Average Pooling2D |
| 3 | 250 | 1 × | 30 | sigmoid | 224 × 224 | 2 Densen (Relu) Dropout (0.5) Dense (Sigmoid) | None |
| Scenario | Label | Precision | Recall | F1-Score | Support | Accuracy |
|---|---|---|---|---|---|---|
| 2 | Drowsy | 0.93 | 0.97 | 0.95 | 532 | 0.96 |
| Non-drowsy | 0.98 | 0.96 | 0.97 | 758 | ||
| 3 | Drowsy | 0.96 | 0.97 | 0.97 | 532 | 0.97 |
| Non-drowsy | 0.98 | 0.97 | 0.98 | 758 |
| Scenario | 1 | 2 | 3 |
|---|---|---|---|
| a. | No detection | 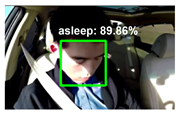 |  |
| b. |  | 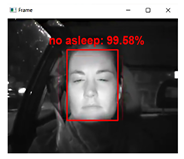 |  |
| c. |  | 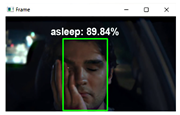 | 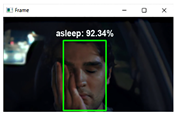 |
| d. |  |  |  |
| e. | No detection |  |  |
| Scenario | 1 | 2 | 3 |
|---|---|---|---|
| a. |  | 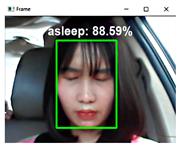 | 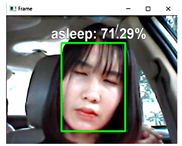 |
| b. |  | 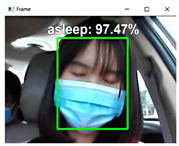 | 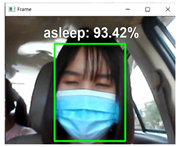 |
| c. | 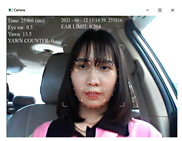 | 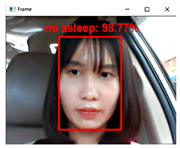 | 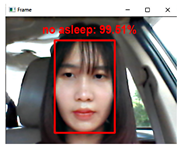 |
| d. |  |  |  |
| Authors | Method | Accuracy |
|---|---|---|
| Mohana and Sheela [5] | Drowsiness detection based on eye closure and yawning using facial landmarks and Haar cascade classifiers. | 85% |
| Jie and Lau [6] | Facial landmark detector and Raspberry Pi for a real-time driver alert system. | 83.39% |
| Ramos et al. [7] | Driver drowsiness detection based on eye movement and yawning using facial landmark analysis. | 85% |
| Mohammed Shinoy et al. [10] | Driver drowsiness detection model using convolutional neural network techniques for android application. | 83.33% |
| Zuopeng Zhao et al. [11] | Driver fatigue detection based on convolutional neural networks using EM-CNN. | 93.623% |
| Biswal et al. [12] | Facial landmark predictor and Raspberry Pi3 Model B Module. | 97.1% |
| Ajinkya Rajkar et al. [13] | Driver drowsiness detection using deep learning. | 96% |
| Madhav Tibrewal et al. [14] | A deep learning approach to detect driver drowsiness. | 94% |
| The proposed method with scenario 1 | Facial landmark detection. | 83% |
| The proposed method with scenario 2 | Deep learning network developed from MobileNet-V2. | 96% |
| The proposed method with scenario 3 | Deep learning network developed from ResNet-50V2. | 97% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Phan, A.-C.; Nguyen, N.-H.-Q.; Trieu, T.-N.; Phan, T.-C. An Efficient Approach for Detecting Driver Drowsiness Based on Deep Learning. Appl. Sci. 2021, 11, 8441. https://doi.org/10.3390/app11188441
Phan A-C, Nguyen N-H-Q, Trieu T-N, Phan T-C. An Efficient Approach for Detecting Driver Drowsiness Based on Deep Learning. Applied Sciences. 2021; 11(18):8441. https://doi.org/10.3390/app11188441
Chicago/Turabian StylePhan, Anh-Cang, Ngoc-Hoang-Quyen Nguyen, Thanh-Ngoan Trieu, and Thuong-Cang Phan. 2021. "An Efficient Approach for Detecting Driver Drowsiness Based on Deep Learning" Applied Sciences 11, no. 18: 8441. https://doi.org/10.3390/app11188441
APA StylePhan, A.-C., Nguyen, N.-H.-Q., Trieu, T.-N., & Phan, T.-C. (2021). An Efficient Approach for Detecting Driver Drowsiness Based on Deep Learning. Applied Sciences, 11(18), 8441. https://doi.org/10.3390/app11188441