
A Study on the Manufacture of Permanent Magnet Traction Control Valve for Electronic Stability Control in Electric Vehicles




Abstract
:1. Introduction
2. Design of the Permanent Magnet TCV
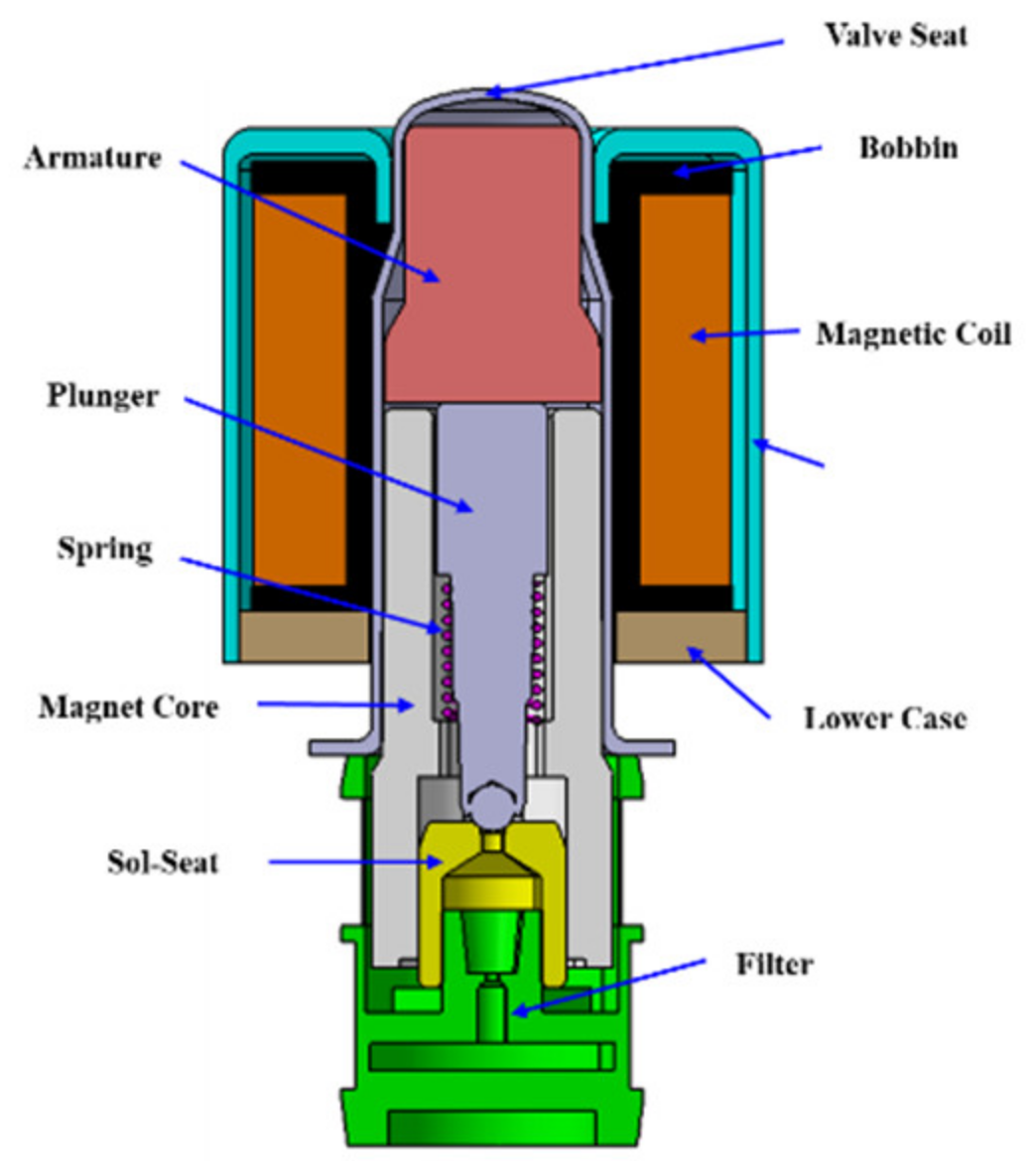
2.1. Schematic of the Conventional TCV
2.2. Required TCV Electromagnetic Force
2.3. Schematic of the Permanent Magnet TCV
2.4. Design of the Magnet Coil Winding
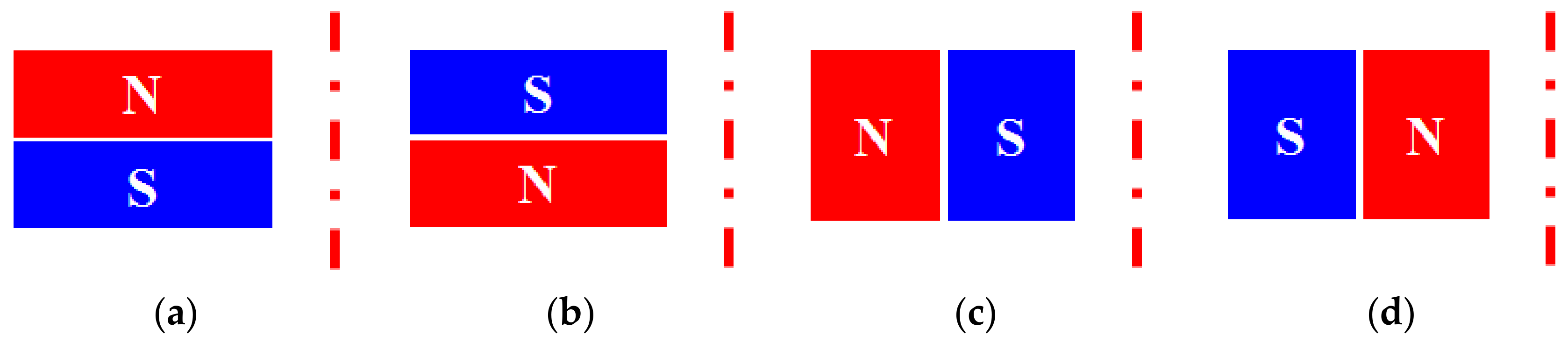
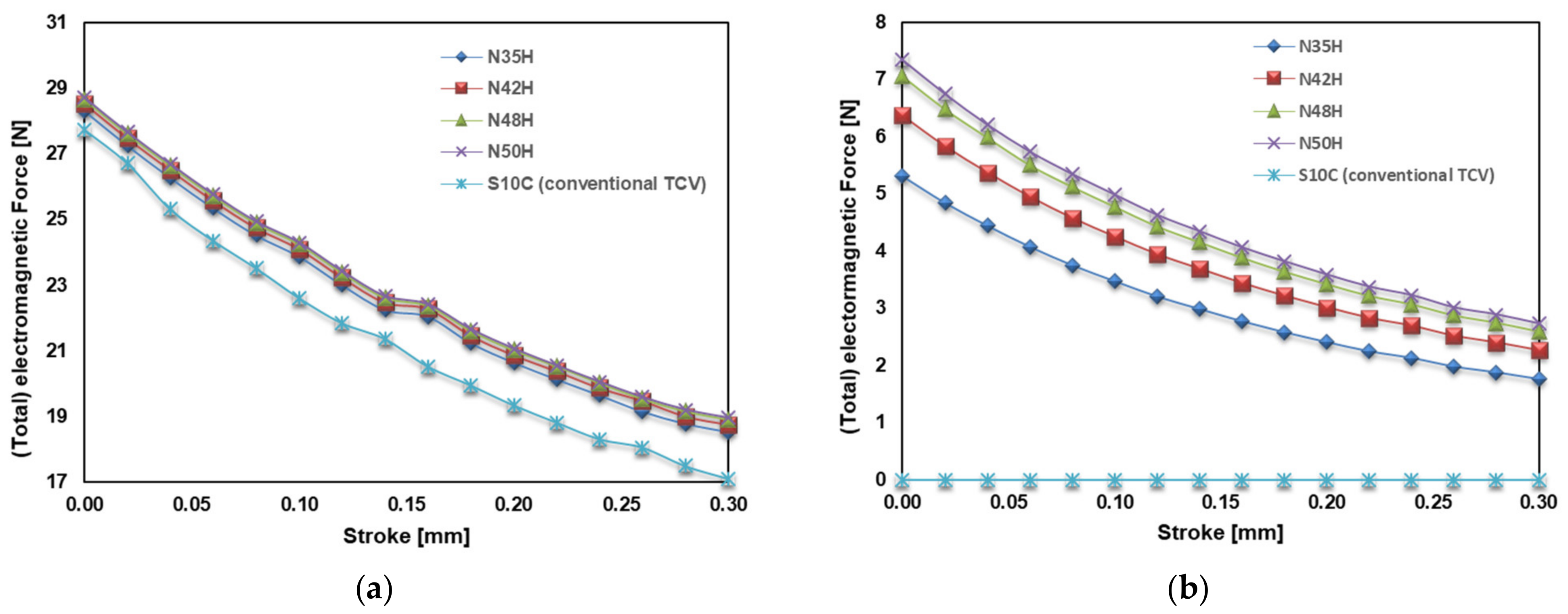
2.5. Design of the Permanent Magnet
- (1)
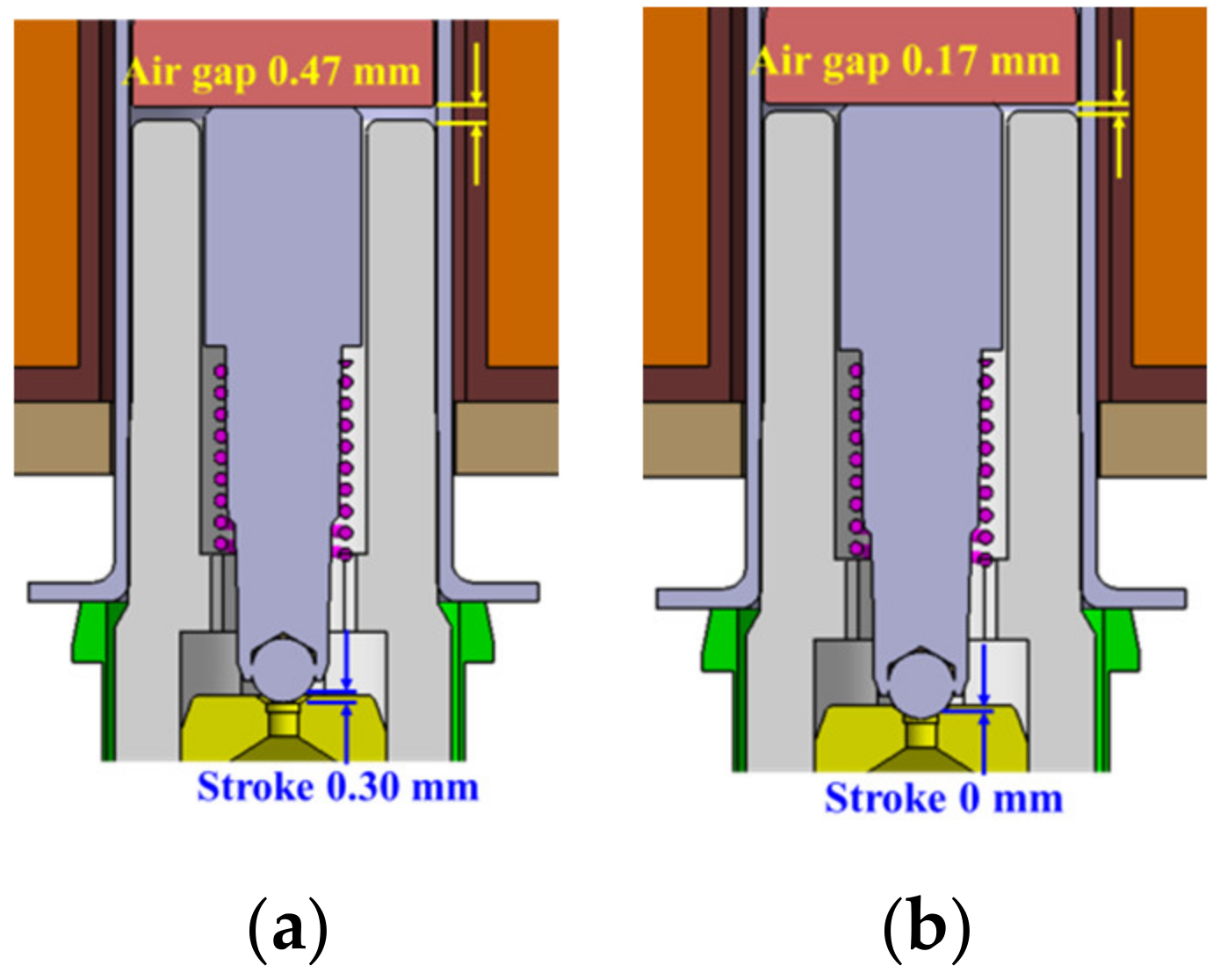
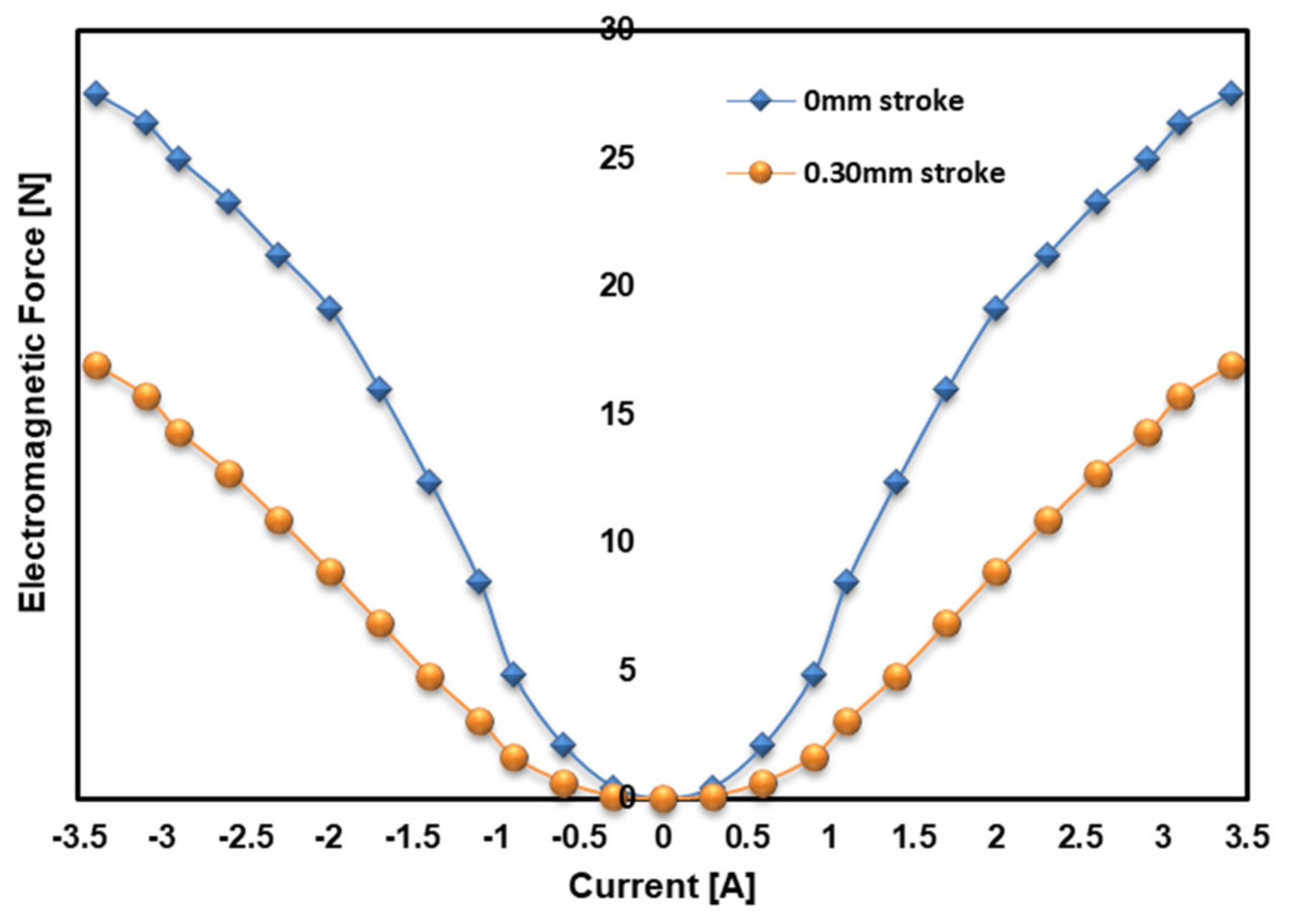
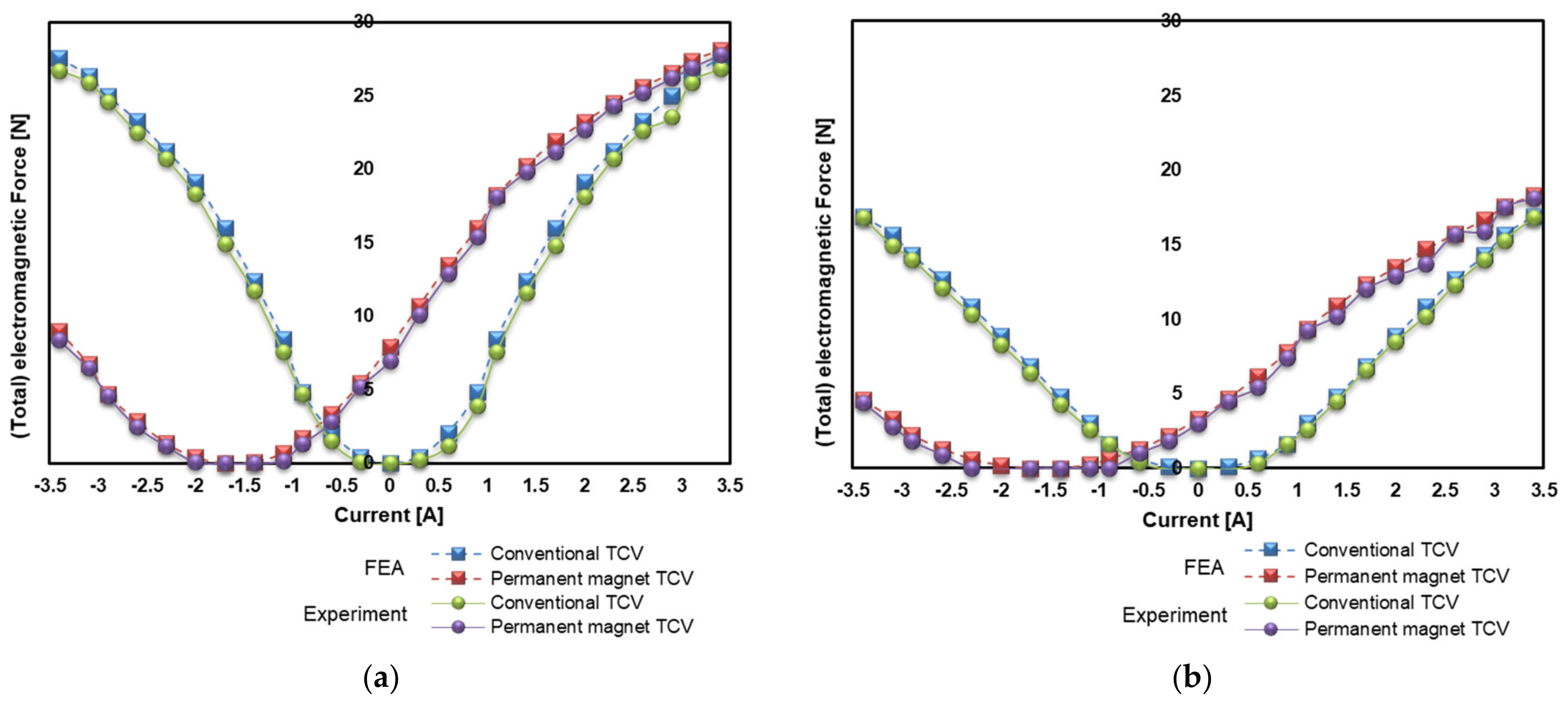
- Applying a current of 3.4 A to the permanent magnet TCV generates a total electromagnetic force of 20 N at 0.30 mm stroke, and the armature can move to the magnet core.
- (2)
- At stroke 0 mm, even if the current is cut off, the armature cannot return to its original position due to the magnetic force of the permanent magnet of 7.3 N.
- (3)
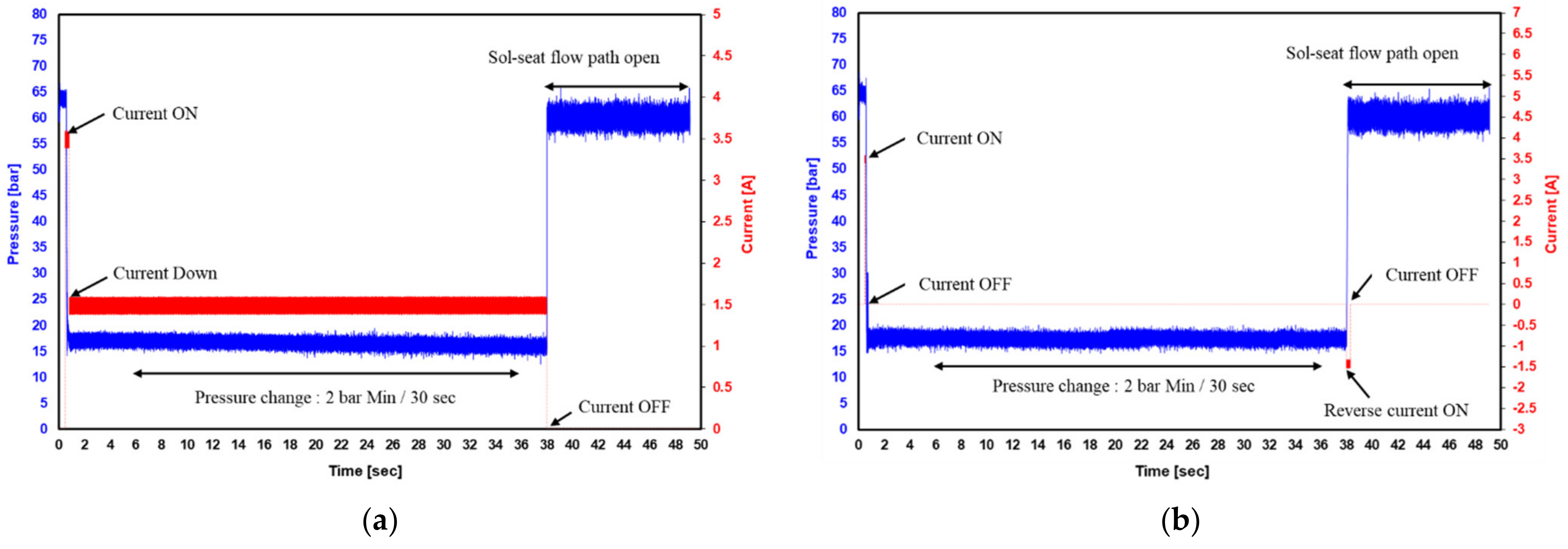
- A current of −1.4 A is supplied to make the total electromagnetic force between the armature and the magnet core close to 0 N.
- (4)
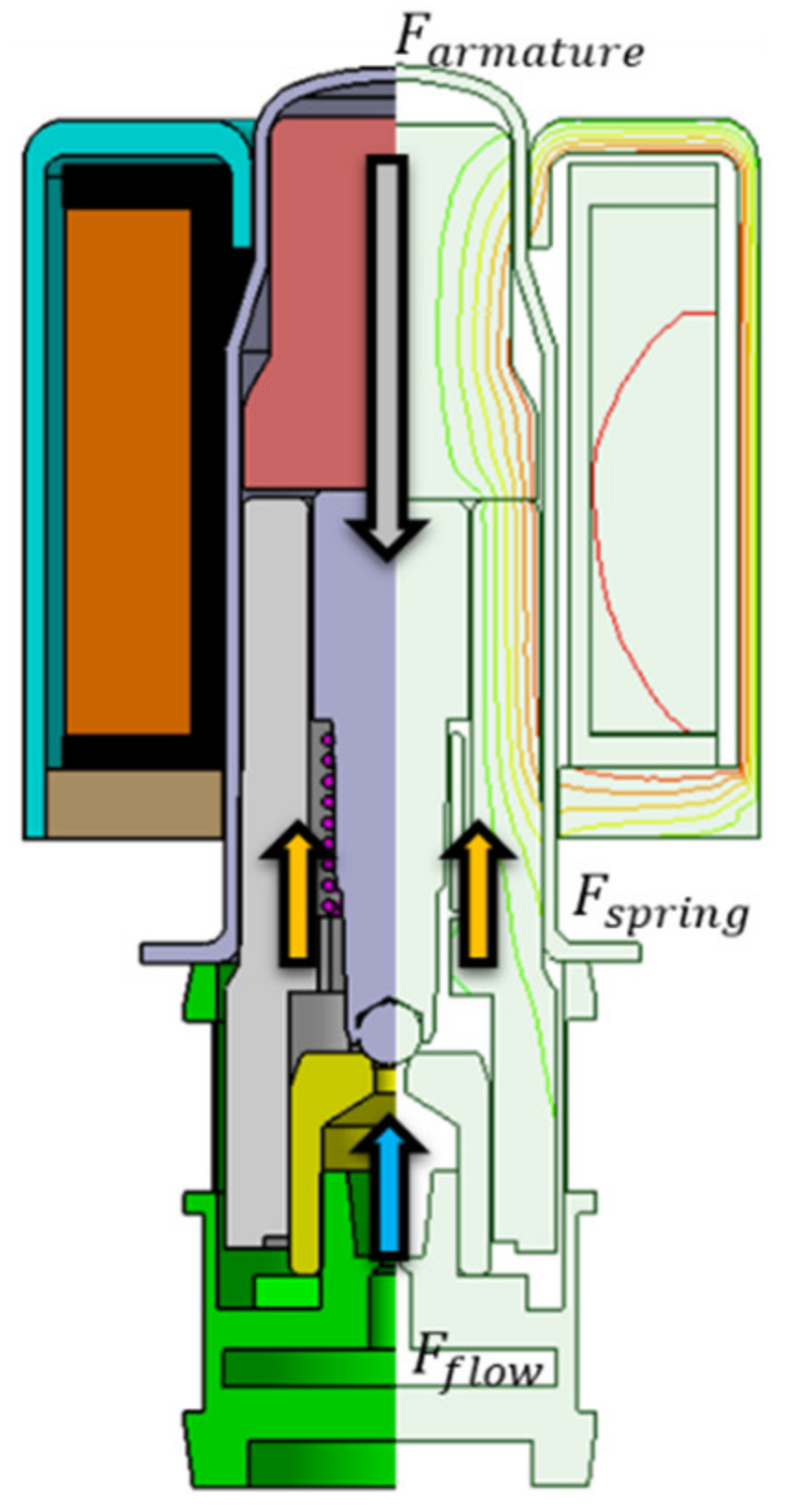
- At this time, the armature can return to the initial position by the spring reaction force, and when returning to the initial position, the reverse current is cut off.

3. Product Manufacturing and Performance Evaluation
4. Conclusions
- (1)
- Permanent magnet polarity direction and specifications were set through simulation. The TCV was designed by applying the set permanent magnet, and as a result of simulation analysis, the total electromagnetic force required for the TCV was satisfied. The total electromagnetic force showed similar results in simulation and product evaluation.
- (2)
- When a current of 3.4 A was applied, the total electromagnetic force of the permanent magnet TCV at 0.30 mm and 0 mm strokes was similar to that of the conventional TCV. These results show that there is no problem with the operation of the armature by total electromagnetic force when a current of 3.4 A is applied in each stroke. Therefore, there was no problem with the total electromagnetic force of TCV even if we replaced the low case with an N-50H permanent magnet in the conventional TCV.
- (3)
- Even after cutting off the current at the 0 mm stroke, which is the position where the sol-seat flow path is completely closed, a magnetic force of 7.3 N remains due to the permanent magnet. It was possible to close the flow path of the sol-seat and cut off the current for the time required to be maintained, and only the magnetic force of the permanent magnet could be used. Therefore, it was possible to reduce the temperature rise and power consumption of the magnetic coil.
- (4)
- A reverse current of −0.9 to −2.0 A was required to open the closed flow path of the sol-seat. It has the same function as power off in a conventional TCV. Thus, the permanent magnet solenoid valve was able to open the flow path with a reverse current and shut off the current (0 A) after the flow path was opened.
- (5)
- After the flow path of the sol-seat was completely opened (0.30 mm stroke), the magnetic force by the permanent magnet was about 2.75 N. However, there was no problem with the TCV function as there was not enough force to move the armature.
5. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chan, C.C. An overview of electric vehicle technology. Proc. IEEE 1993, 81, 1202–1213. [Google Scholar] [CrossRef]
- Jalil, N.; Kheir, N.A.; Salman, M. A rule-based energy management strategy for a series hybrid vehicle. In Proceedings of the 1997 American Control Conference, Albuquerque, NM, USA, 4–6 June 1997; pp. 689–693. [Google Scholar]
- Kutkut, N.H.; Wiegman, H.L.; Divan, D.M.; Novotny, D.W. Design considerations for charge equalization of an electric vehicle battery system. IEEE Trans. Ind. Appl. 1999, 35, 28–35. [Google Scholar] [CrossRef] [Green Version]
- Rodatz, P.; Paganelli, G.; Sciarretta, A.; Guzzella, L. Optimal power management of an experimental fuel cell/supercapacitor-powered hybrid vehicle. Control. Eng. Pract. 2005, 13, 41–53. [Google Scholar] [CrossRef]
- Chen, Q.; Shu, H.; Chen, L. Simulation analysis of cogging torque of permanent magnet synchronous motor for electric vehicle. J. Mech. Sci. Technol. 2012, 26, 4065–4071. [Google Scholar] [CrossRef]
- Do, H.T.; Ahn, K.K. Velocity control of a secondary controlled closed-loop hydrostatic transmission system using an adaptive fuzzy sliding mode controller. J. Mech. Sci. Technol. 2013, 27, 875–884. [Google Scholar] [CrossRef]
- Johannesson, L.; Asbogard, M.; Egardt, B. Assessing the Potential of Predictive Control for Hybrid Vehicle Powertrains Using Stochastic Dynamic Programming. IEEE Trans. Intell. Transp. Syst. 2007, 8, 71–83. [Google Scholar] [CrossRef]
- Wellstead, P.; Pettit, N. Analysis and redesign of an antilock brake system controller. IEE Proc. Control Theory Appl. 1997, 144, 413–426. [Google Scholar] [CrossRef]
- Gerum, E.; Palkovics, L.; Semsey, A. Roll-Over Prevention System for Commercial Vehicles ? Additional Sensorless Function of the Electronic Brake System. Veh. Syst. Dyn. 1999, 32, 285–297. [Google Scholar] [CrossRef]
- Margolis, D.; Shim, T. A bond graph model incorporating sensors, actuators, and vehicle dynamics for developing controllers for vehicle safety. J. Frankl. Inst. 2001, 338, 21–34. [Google Scholar] [CrossRef]
- Trivedi, M.M.; Gandhi, T.; McCall, J. Looking-In and Looking-Out of a Vehicle: Computer-Vision-Based Enhanced Vehicle Safety. IEEE Trans. Intell. Transp. Syst. 2007, 8, 108–120. [Google Scholar] [CrossRef] [Green Version]
- Bera, T.; Bhattacharya, K.; Samantaray, A. Evaluation of antilock braking system with an integrated model of full vehicle system dynamics. Simul. Model. Pr. Theory 2011, 19, 2131–2150. [Google Scholar] [CrossRef]
- Chung, W.S.; Song, H.S.; Jung, D.H.; Park, T.W. Development of a systematic process for hydraulic brake system design and for hot judder characteristic estimation. J. Mech. Sci. Technol. 2012, 26, 3893–3901. [Google Scholar] [CrossRef]
- Liebemann, E.; Meder, K.; Schuh, J.; Nenninger, G. Safety and Performance Enhancement: The Bosch Electronic Stability Control (ESP); Robert Bosch GmbH: Gerlingen, Germany, 2004. [Google Scholar]
- Kim, H.M.; Kang, I.-H.; Choi, K.-S.; Wang, H.-M.; Tae, H.-J. Computational Analysis of Pressure Control Characteristics in a VFS Solenoid Valve; Inje University: Gimhae, Korea, 2007. [Google Scholar] [CrossRef]
- Kim, N.; Kim, K.; Lee, W.; Hwang, I. Development of Mando ESP (Electronic Stability Program); Mando Corporation: Seongnam-si, Korea, 2003. [Google Scholar] [CrossRef]
- Sung, B.J. A design of on/off type solenoid actuator for valve operation. J. Drive Control 2009, 6, 24–32. [Google Scholar]
- Wu, S.; Zhao, X.; Li, C.; Jiao, Z.; Qu, F. Multiobjective Optimization of a Hollow Plunger Type Solenoid for High Speed On/Off Valve. IEEE Trans. Ind. Electron. 2018, 65, 3115–3124. [Google Scholar] [CrossRef]
- Branciforte, M.; Meli, A.; Muscato, G.; Porto, D. ANN and Non-Integer Order Modeling of ABS Solenoid Valves. IEEE Trans. Control. Syst. Technol. 2011, 19, 628–635. [Google Scholar] [CrossRef]
- Yun, S.; Yun, D. Performance improvement strategy of solenoid valve and magnetic material technique. J. Drive Control 2009, 6, 28–34. [Google Scholar]
- Yun, S.N.; Ham, Y.B.; Park, J.H. A Study on Response Improvement of a Proportional Solenoid Actuator. J. Drive Control 2016, 13, 47–52. [Google Scholar] [CrossRef] [Green Version]
- Yun, S. Design of Proportional Solenoid Actuator using Maxwell CAE Software. J. Drive Control 2012, 9, 32–36. [Google Scholar] [CrossRef]
- Tanaka, H. Proportional Solenoid. Fluid Power Syst. 2000, 31, 200–207. [Google Scholar]
- Lee, H.R.; Ahn, J.H.; Shin, J.O.; Kim, H.Y. Design of Solenoid Actuator for FCV Cylinder Valve Considering Structural Safety. J. Korean Soc. Manuf. Technol. Eng. 2016, 25, 157–163. [Google Scholar] [CrossRef] [Green Version]
- Liu, Q.; Bo, H.; Qin, B. Experimental study and numerical analysis on electromagnetic force of direct action solenoid valve. Nucl. Eng. Des. 2010, 240, 4031–4036. [Google Scholar] [CrossRef]
- Sun, Z.Y.; Li, G.X.; Wang, L.; Wang, W.H.; Gao, Q.X.; Wang, J. Effects of structure parameters on the static electromagnetic characteristics of solenoid valve for an electronic unit pump. Energy Convers. Manag. 2016, 113, 119–130. [Google Scholar] [CrossRef]
- Hung, N.B.; Lim, O. Improvement of Electromagnetic Force and Dynamic Response of a Solenoid Injector Based on the Effects of Key Parameters. Int. J. Automot. Technol. 2019, 20, 949–960. [Google Scholar] [CrossRef]
- Tao, G.; Chen, H.Y.; J, Y.Y.; He, Z. Optimal design of the magnetic field of a high-speed response solenoid valve. J. Mater. Process. Technol. 2002, 129, 555–558. [Google Scholar] [CrossRef]
- Bayat, F.; Tehrani, F.; Danesh, M. Finite element analysis of proportional solenoid characteristics in hydraulic valves. Int. J. Automot. Technol. 2012, 13, 809–816. [Google Scholar] [CrossRef]
- Wang, L.; Li, G.-X.; Xu, C.-L.; Xi, X.; Wu, X.-J.; Sun, S.-P. Effect of characteristic parameters on the magnetic properties of solenoid valve for high-pressure common rail diesel engine. Energy Convers. Manag. 2016, 127, 656–666. [Google Scholar] [CrossRef]
- Sung, B.J.; Lee, E.W.; Kim, H.E. Empirical Design of an On and Off Type Solenoid Actuator for Valve Operation. KIEE Int. Trans. Electr. Mach. Energy Convers. Syst. 2004, 4, 39–46. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Values |
|---|---|
| Voltage (V) | 12 |
| Resistance (Ohm) | 3.5 |
| Conduct diameter (Cd:Φ) | 0.3 |
| Overall diameter (Nd:Φ) | 0.345 |
| Bobbin inner diameter (Bi:Φ) | 8.5 |
| Bobbin outer diameter (Bo:Φ) | 16.1 |
| Bobbin height (h:mm) | 12.8 |
| Bobbin width (w:mm) | 3.3 |
| Specific resistance (Ohm-mm) | 1.7E−0.5 |
| Resistance per unit length (Ohm-mm) | 2.44E−0.4 |
| Layer (turns) | 36.5 |
| Step | 10 |
| Magnetic coil turns | 360 |
| Ampere turn | 1234 |
| Parameter | Values | |
|---|---|---|
| N-35H | Residual induction (T) | 1.16–1.22 |
| Coercive force (KA/m) | 845 MIN | |
| N-42H | Residual induction (T) | 1.28–1.34 |
| Coercive force (KA/m) | 938 MIN | |
| N-48H | Residual induction (T) | 1.36–1.43 |
| Coercive force (KA/m) | 1000 MIN | |
| N-50H | Residual induction (T) | 1.39–1.46 |
| Coercive force (KA/m) | 1035 MIN | |
| Air gap (mm) | 0.47 | |
| Stroke (mm) | 0.30 | |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lee, H.-S.; Park, S.-G.; Hong, M.-P.; Lee, H.-J.; Kim, Y.-S. A Study on the Manufacture of Permanent Magnet Traction Control Valve for Electronic Stability Control in Electric Vehicles. Appl. Sci. 2021, 11, 7794. https://doi.org/10.3390/app11177794
Lee H-S, Park S-G, Hong M-P, Lee H-J, Kim Y-S. A Study on the Manufacture of Permanent Magnet Traction Control Valve for Electronic Stability Control in Electric Vehicles. Applied Sciences. 2021; 11(17):7794. https://doi.org/10.3390/app11177794
Chicago/Turabian StyleLee, Hak-Sun, Sang-Gyun Park, Myoung-Pyo Hong, Han-Jin Lee, and Young-Suk Kim. 2021. "A Study on the Manufacture of Permanent Magnet Traction Control Valve for Electronic Stability Control in Electric Vehicles" Applied Sciences 11, no. 17: 7794. https://doi.org/10.3390/app11177794
APA StyleLee, H.-S., Park, S.-G., Hong, M.-P., Lee, H.-J., & Kim, Y.-S. (2021). A Study on the Manufacture of Permanent Magnet Traction Control Valve for Electronic Stability Control in Electric Vehicles. Applied Sciences, 11(17), 7794. https://doi.org/10.3390/app11177794