
Evaluating Levels of Automation in Human–Robot Collaboration at Different Workload Levels


Abstract
:1. Introduction
2. Materials and Methods
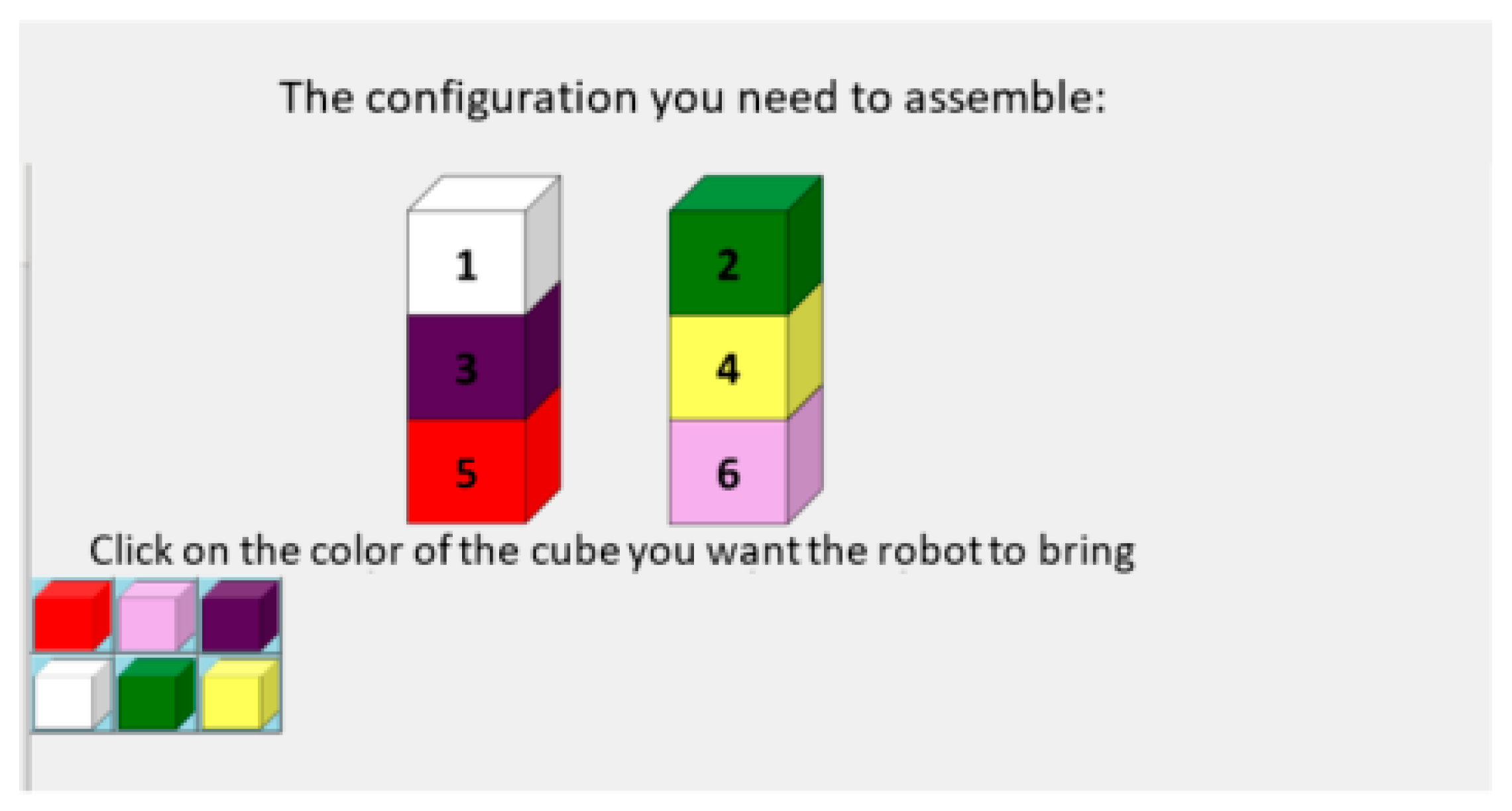
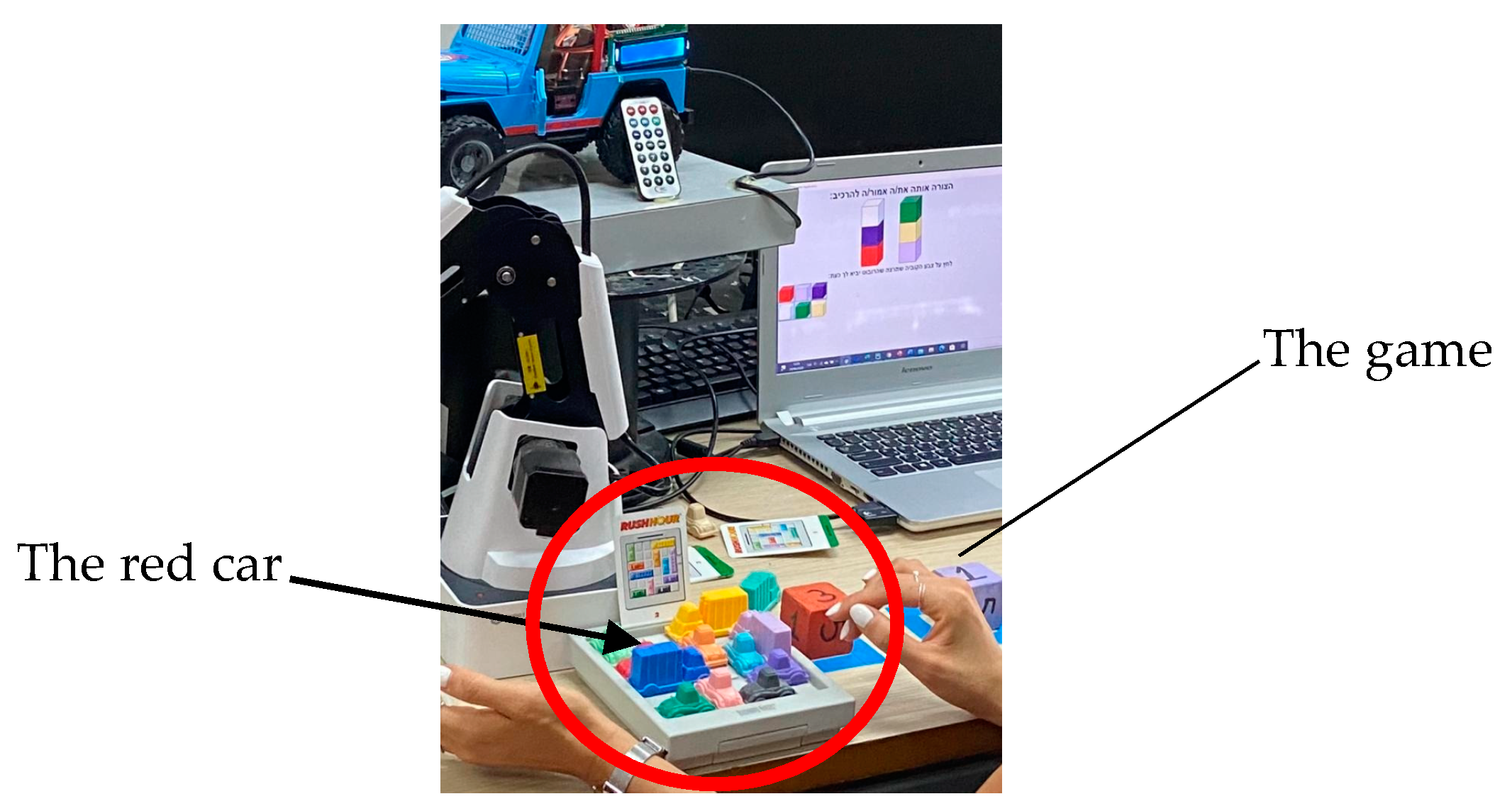
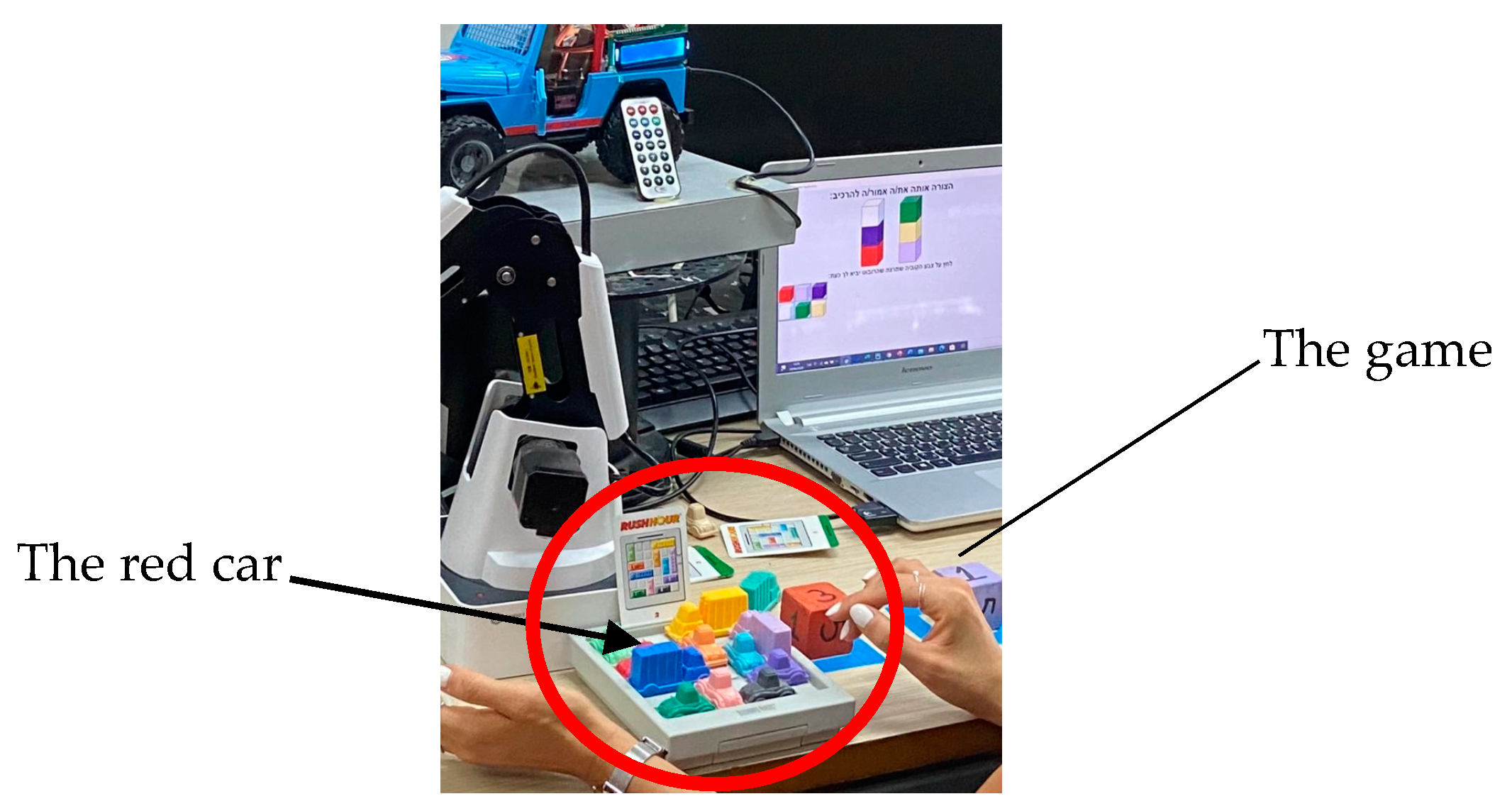
2.1. Experimental System
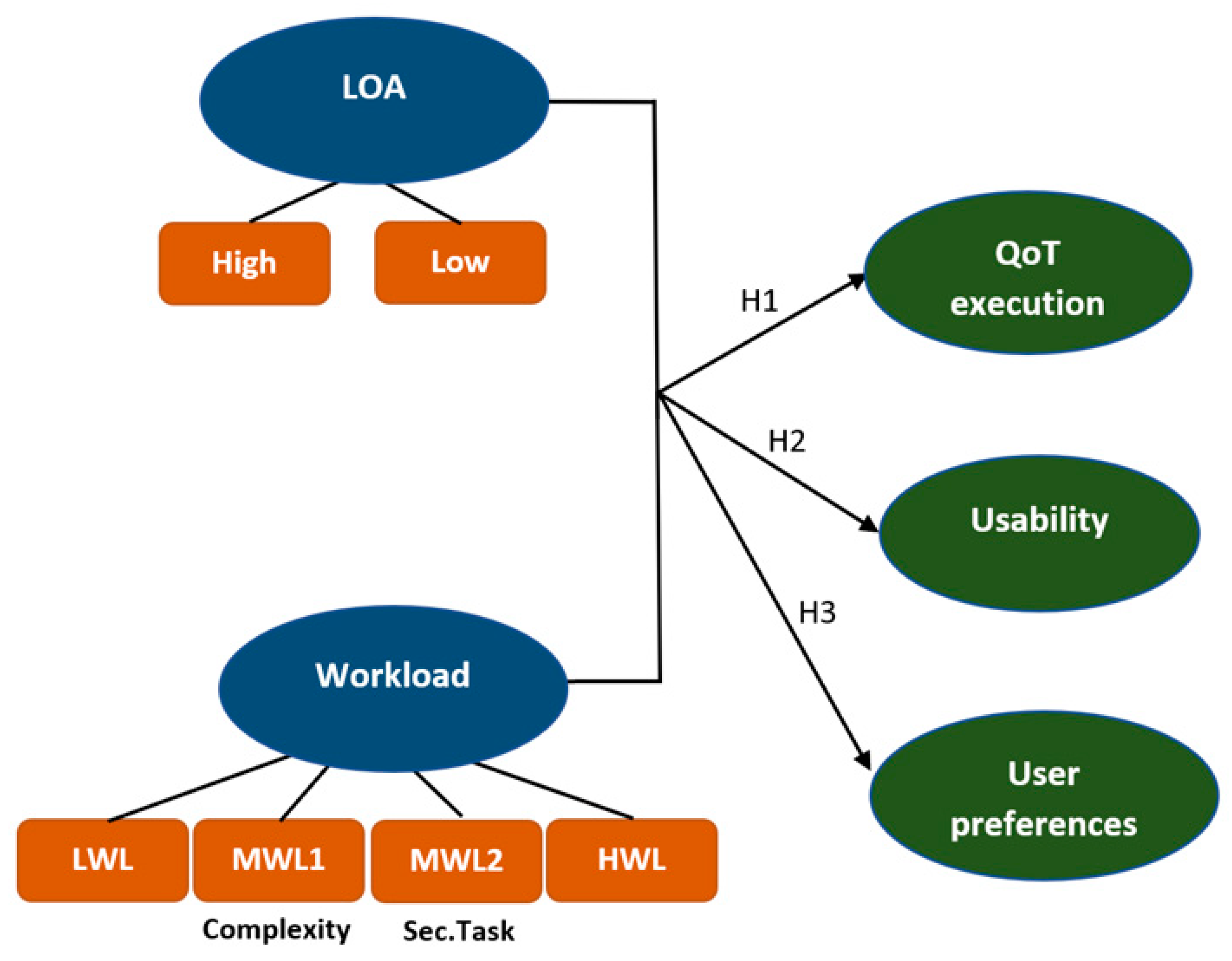
2.2. Design of the Experimental Conditions
2.2.1. Levels of Automation (LOA) Modes
- (a)
- Low LOA—the user has autonomy to select the type and order of cubes. The robot supports the user by bringing the type of cube the user selected via the user interface.
- (b)
- High LOA—the robot has autonomy to bring the specific type of cube and in the order preprogrammed in its operation. The user simply demands for a cube through the user interface and the robot brings the type of cube suitable for the specific configuration assembled.
2.2.2. Levels of Workload
- (a)
- Low workload (LWL)—the users perform only the main task, assembling cubes (without reference to the numbers on the cubes) to match the specific configuration required. The workload involves some physical demand of arranging the cubes, mental demand of thinking about the type of cube that would match the required configuration and some temporal demand related to completing the task in the shortest possible time.
- (b)
- Medium workload 1 (MWL1)—the users perform only the main task of assembling the cubes but with reference to the numbers on the cubes. It depicts the LWL level with increased task complexity (or high workload without secondary task).
- (c)
- Medium workload 2 (MWL2)—the users perform the main task of assembling (without references to the numbers on the cubes) simultaneously with the secondary task. It depicts the high workload level without complexity included (or the LWL with a secondary task).
- (d)
- High workload (HWL)—the users perform the main task of assembling the cubes (with reference to the numbers on the cubes) along with a secondary task. This combines both secondary task and increased task complexity.
2.3. Experimental Design
2.4. Study Hypotheses
2.5. Participants
2.6. Experimental Procedure
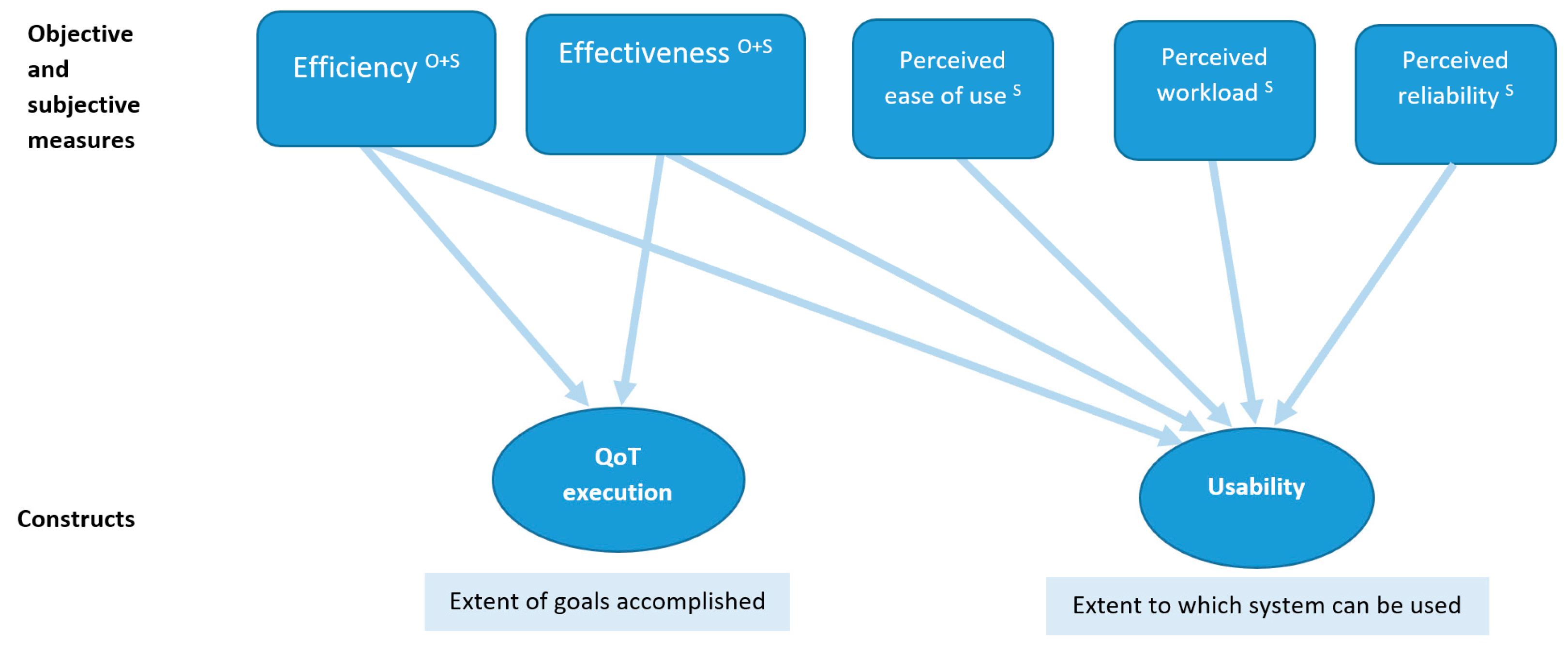
2.7. Dependent Variables
2.7.1. Objective Measures
2.7.2. Subjective Measures
2.7.3. Constructs
2.8. Analysis
3. Results
3.1. QoT Execution
3.1.1. Effectiveness
3.1.2. Efficiency
3.2. Usability
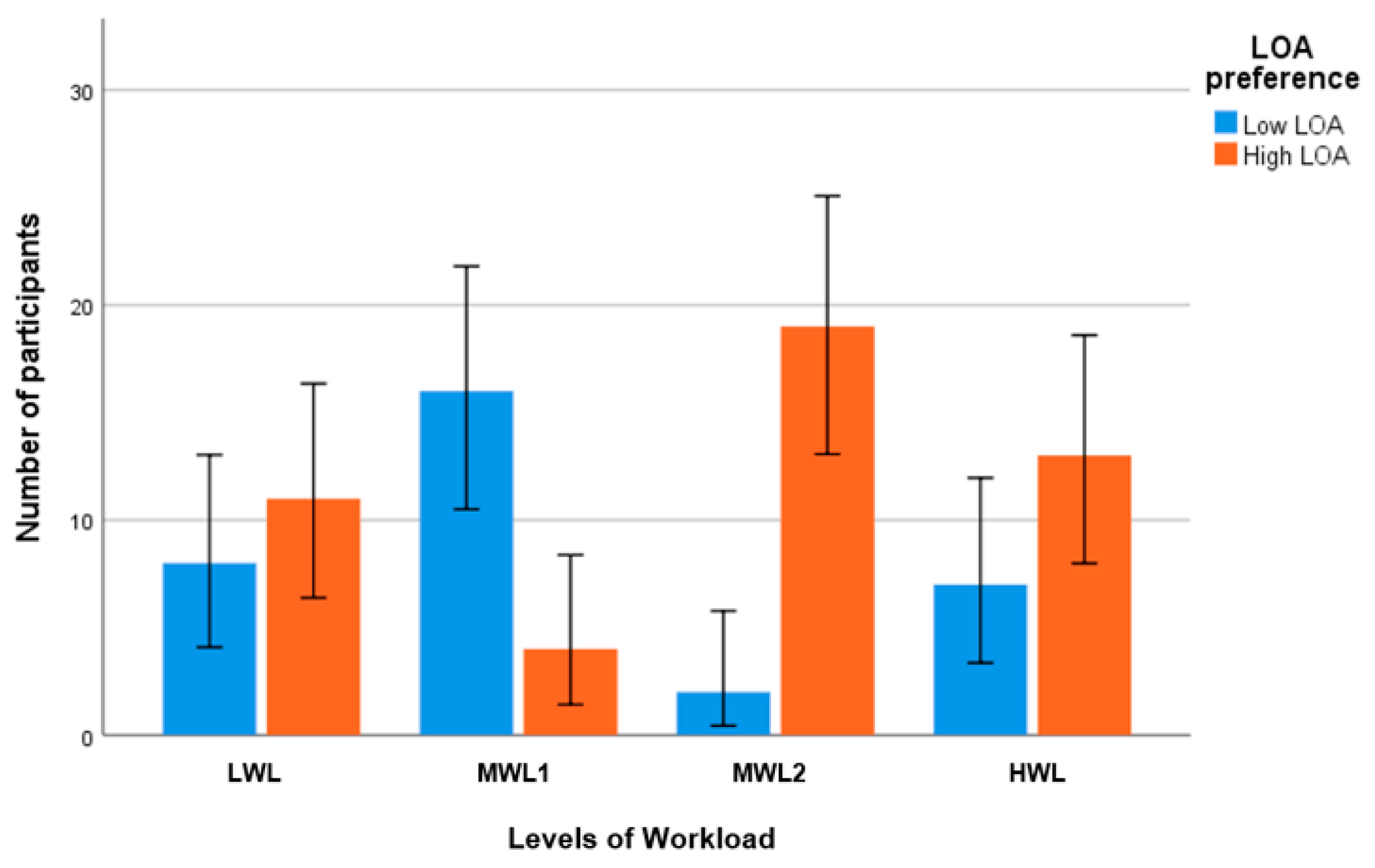
3.3. User Preferences
3.4. Comparison between Workload Groups for Different LOA Modes
4. Discussion
4.1. Influence of LOA
4.2. Workload Considerations
4.3. Limitations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bauer, A.; Wollherr, D.; Buss, M.D. Human-Robot collaboration: A survey. Int. J. Humanoid Robot. 2008, 5, 47–66. [Google Scholar] [CrossRef]
- Goodrich, M.A.; Schultz, A.C. Human-Robot Interaction: A Survey; Now Publishers Inc: Hanover, MA, USA, 2007. [Google Scholar]
- Hentout, A.; Aouache, M.; Maoudj, A.; Akli, I. Human-robot interaction in industrial collaborative robotics: A literature review of the decade 2008–2017. Adv. Robot. 2019, 33, 764–799. [Google Scholar] [CrossRef]
- Bonarini, A. Communication in human-robot interaction. Curr. Robot. Rep. 2020, 1, 279–285. [Google Scholar] [CrossRef]
- Mohebbi, A. Human-Robot interaction in rehabilitation and assistance: A review. Curr. Robot. Rep. 2020, 1, 131–144. [Google Scholar] [CrossRef]
- Prati, E.; Peruzzini, M.; Pellicciari, M.; Raffaeli, R. How to include user experience in the design of human-robot interaction. Robot. Comput. Integr. Manuf. 2021, 68, 102072. [Google Scholar] [CrossRef]
- Johnson, G.I.; Wilson, J.R. Future directions and research issues for ergonomics and advanced manufacturing technology (AMT). Appl. Ergon. 1988, 19, 3–8. [Google Scholar] [CrossRef]
- Kaber, D.; Endsley, M.R. Out-of-the-loop performance problems and the use of intermediate levels of automation for improved control system functioning and safety. Am. Inst. Chem. Eng. 1997, 16, 126–131. [Google Scholar] [CrossRef]
- Kaber, D.; Endsley, M.R. Level of automation effects on performance, situation awareness and workload in a dynamic control task. Ergonomics 1999, 42, 462–492. [Google Scholar] [CrossRef] [Green Version]
- Lindström, V.; Winroth, M.; Stahre, J. Levels of automation in manufacturing. Int. J. Ergon. Hum. Factors 2008, 30, 1–29. [Google Scholar]
- Shi, J.; Jimmerson, G.; Pearson, T.; Menassa, R. Levels of human and robot collaboration for automotive manufacturing. In Proceedings of the Workshop on Performance Metrics for Intelligent Systems, College Park, MD, USA, 20–22 March 2012; pp. 95–100. [Google Scholar] [CrossRef]
- Olatunji, S.; Markfed, N.; Gutman, D.; Givati, S.; Sarne-Fleischman, V.; Oron-Gilad, T.; Edan, Y. Improving the interaction of older adults with a socially assistive table setting robot. In Lecture Notes of Artificial Intelligence, Proceedings of the 11th Interna-tional Conference on Social Robotics, Madrid, Spain, 26–29 November 2019; Springer: Berlin/Heidelberg, Germany, 2019; Volume 11876, pp. 568–577. [Google Scholar]
- Wang, W.; Chen, Y.; Li, R.; Jia, Y. Learning and comfort in human-robot interaction: A review. Appl. Sci. 2019, 9, 5152. [Google Scholar] [CrossRef] [Green Version]
- Xu, J.; Anders, S.; Pruttianan, A.; France, D.; Lau, N.; Adams, A.J.; Weigner, M.B. Human performance measures for the evaluation of process control human-system interfaces in high-fidelity simulations. Appl. Ergon. 2018, 73, 151–165. [Google Scholar] [CrossRef] [PubMed]
- Hart, S.G.; Wickens, C.D. Workload assessment and prediction. In Manprint; Springer: Amsterdam, The Netherlands, 1990; pp. 257–296. [Google Scholar]
- Hart, S.G. NASA-Task load index (NASA-TLX); 20 years later. Proc. Hum. Factors Ergon. Soc. 2006, 50, 904–908. [Google Scholar] [CrossRef] [Green Version]
- Hart, S.G.; Staveland, L.E. Development of NASA-TLX (Task Load Index): Results of empirical and theoretical research. Adv. Psychol. 1988, 52, 139–183. [Google Scholar] [CrossRef]
- Hilburn, D.; Jorna, P.G. Workload and air traffic control. In Human Factors in Transportation. Stress, Workload, and Fatigue; Hancock, P.A., Desmond, P.A., Eds.; Lawrence Erlbaum Associates Publishers: Mahwah, NJ, USA, 2001; pp. 384–394. [Google Scholar]
- Yeh, Y.-Y.; Wickens, C.D. Dissociation of performance and subjective measures of workload. Hum. Factors J. Hum. Factors Ergon. Soc. 1988, 30, 111–120. [Google Scholar] [CrossRef]
- Wood, R.E. Task complexity: Definition of the construct. Organ. Behav. Hum. Decis. Process 1986, 37, 60–82. [Google Scholar] [CrossRef]
- Rasmussen, M.; Standal, M.I.; Laumann, K. Task complexity as a performance shaping factor: A review and recommendations in standardized plant analysis risk-human reliability analysis (SPAR-H) adaption. Saf. Sci. 2015, 76, 228–238. [Google Scholar] [CrossRef]
- Olsen, D.R.; Goodrich, M.A. Metrics for Evaluating Human-Robot Interactions. 2003. Available online: https://faculty.cs.byu.edu/~mike/mikeg/papers/OlsenGoodrichPERMIS2003.pdf (accessed on 9 August 2021).
- Campbell, D.J. Task complexity: A review and analysis. Acad. Manag. Rev. 1988, 13, 40–52. [Google Scholar] [CrossRef]
- Braarud, P.Ø. Subjective task complexity and subjective workload: Criterion validity for complex team tasks. Int. J. Cogn. Ergon. 2001, 5, 261–273. [Google Scholar] [CrossRef]
- Neill, T.A.O.; Mcneese, N.J.; Carolina, S.; Barron, A. Human—Autonomy teaming: A Review and analysis of the empirical literature. J. Hum. Factors Ergon. Soc. 2017. [Google Scholar] [CrossRef]
- Kolbeinsson, A.; Lagerstedt, E. Lindblom, J. Foundation for a classification of collaboration levels for human-robot cooperation in manufacturing. Prod. Manuf. Res. 2019, 7, 448–471. [Google Scholar] [CrossRef]
- Lindström, V.; Winroth, M. Aligning manufacturing strategy and levels of automation: A case study. J. Eng. Technol. Manag. 2010, 27, 148–159. [Google Scholar] [CrossRef] [Green Version]
- Steinfeld, A.; Fong, T.; Kaber, D.; Lewis, M.; Scholtz, J.; Schultz, A.; Goodrich, M. Common metrics for human-robot interaction. In Proceedings of the 1st ACM SIGCHI/SIGART Conference on Human-Robot Interaction (H 06), Salt Lake City, UT, USA, 2–3 March 2006; pp. 33–40. [Google Scholar] [CrossRef] [Green Version]
- Aly, A.; Griffiths, S.; Stramandinoli, F. Metrics and benchmarks in human-robot interaction: Recent advances in cognitive robotics. Cogn. Syst. Res. 2017, 43, 313–323. [Google Scholar] [CrossRef] [Green Version]
- Bensch, S.; Jevtíc, A.; Hellström, T. On interaction quality in human-robot interaction. In Proceedings of the 9th International Conference on Agents and Artificial Intelligence (ICAART 2017), Porto, Portugal, 24–26 February 2017; pp. 182–189. [CrossRef] [Green Version]
- Efthimiou, E.; Papageorgiou, X.S.; Fotinea, S.E.; Karavasili, A.; Vacalopoulou, A.; Goulas, T. User centered design in practice adapting HRI to real user needs. In Proceedings of the 12th ACM International Conference on Pervasive Technologies Related to Assistive Environments, Rhodes, Greece, 5–7 June 2019; pp. 425–429. [Google Scholar] [CrossRef]
- Lindblom, J.; Alenljung, B.; Billing, E. Evaluating the User Experience of Human-Robot Interaction; Springer: Cham, Switzerland, 2020; pp. 231–256. [Google Scholar]
- Honig, S.S.; Oron-Gilad, T.; Serna-Fleischmann, V.; Olatunji, S.; Edan, Y. A user-needs based approach for designing human-robot interactions. In Proceedings of the Workshop on Robotic Co-Workers 4.0: Human Safety and Comfort in Human-Robot Interactive Social Environments, IEEE/RSJ International Conference on Intelligent Robots and Systems, Madrid, Spain, 1–5 October 2018. [Google Scholar]
- Parasuraman, R. Designing automation for human use: Empirical studies and quantitative models. Ergonomics 2000, 43, 931–951. [Google Scholar] [CrossRef] [PubMed]
- Bröhl, C.; Nelles, J.; Brandl, C.; Mertens, A.; Nitsch, V. Human-Robot collaboration acceptance model: Development and comparison for Germany, Japan, China and the USA. Int. J. Soc. Robot. 2019, 11, 709–726. [Google Scholar] [CrossRef] [Green Version]
- Renner, P.; Pfeiffer, T. Model-based acquisition and analysis of multimodal interactions for improving human-robot interaction. In Proceedings of the Symposium on Eye Tracking Research and Applications, Safety Harbor, FL, USA, 26–28 March 2014; pp. 361–362. [Google Scholar] [CrossRef] [Green Version]
- Wickens, C.D. Multiple resources and mental workload. J. Hum. Factors Ergon. Soc. 2008, 50, 449–455. [Google Scholar] [CrossRef] [Green Version]
- Wickens, C.D.; Li, H.; Santamaria, A.; Sebok, A.; Sarter, N.B. Stages and levels of automation: An integrated meta-analysis. Proc. Hum. Factors Ergon. Soc. Ann. Meet. 2010, 4, 389–393. [Google Scholar] [CrossRef]
- Onnasch, L.; Wickens, C.D.; Li, H.; Manzey, D. Human performance consequences of stages and levels of automation: An integrated meta-analysis. J. Hum. Factors Ergon. Soc. 2014, 56. [Google Scholar] [CrossRef]
- ISO. ISO 9241-11:2018(en). ERGONOMICS of Human-System Interaction—Part 11: Usability: Definitions and Concepts. 2018. Available online: https://www.iso.org/obp/ui/#iso:std:iso:9241:-11:ed-2:v1:en (accessed on 29 February 2020).
- Ashcraft, C.C.; Goodrich, M.A.; Crandall, J.W. Moderating operator influence in human-swarm systems. In Proceedings of the IEEE International Conference on Systems, Man and Cybernetics (SMC), Bari, Italy, 6–9 October 2019; pp. 4275–4282. [Google Scholar] [CrossRef]
- Endsley, M.; Kiris, E.O. The Out-of-the-loop performance problem and level of control in automation. J. Hum. Factors Ergon. Soc. 1995, 37, 381–394. [Google Scholar] [CrossRef]
- Syrdal, D.S.; Dautenhahn, K.; Koay, K.; Walters, M.L. The negative attitudes towards robots scale and reactions to robot behaviour in a live human-robot interaction study. In Proceedings of the 23rd Convention of the Society for the Study of Artificial Intelligence and Simulation of Behaviour, Edinburgh, UK, 6–9 April 2009; pp. 109–115. [Google Scholar]
- Davis, F.D. Perceived usefulness, perceived ease of use, and user acceptance of information technology. MIS Q. 1989, 13, 319–340. [Google Scholar] [CrossRef] [Green Version]
- Ekşioǧlu, M.; Kiriş, E.; Çakir, T.; Güvendik, M.; Koyutürk, E.D.; Yilmaz, M. Design, user experience and usability. Web, mobile, and product design. In Lecture Notes on Computer Science, Proceedings of the 2nd International Conference, DUXU 2013 (Part of the HCI International), Las Vegas, NV, USA, 21–26 July 2013; Springer: Berlin/Heidelberg, Germany, 2013; Volume 8015, pp. 173–182. [Google Scholar]
- International Organization for Standardization (ISO). 9000 Store. ISO 9001 Processes, Procedures and Work Instructions. 2020. Available online: https://the9000store.com/iso-9001-2015-requirements/iso-9001-2015-context-of-the-organization/processes-procedures-work-instructions/ (accessed on 5 October 2020).
- Baraglia, M.; Cakmak, Y.; Nagai, R.; Rao, R.; Asada, M. Initiative in robot assistance during collaborative task execution. In Proceedings of the 11th ACM/IEEE International Conference on Human-Robot Interaction (HRI), Christchurch, New Zealand, 7–10 March 2016; pp. 67–74. [CrossRef]
- Parasuraman, R.; Riley, V. Humans and automation: Use, misuse, disuse, abuse. J. Hum. Factors Ergon. Soc. 1997, 39, 230–253. [Google Scholar] [CrossRef]
- Hærem, T.; Pentland, B.T.; Miller, K.D. Task complexity: Extending a core concept. Acad. Manag. Rev. 2015, 40, 446–460. [Google Scholar] [CrossRef] [Green Version]
- Monostori, L.; Váncza, J.; Kumara, S.R.T. Agent-based systems for manufacturing. CIRP Ann. 2006, 55, 697–720. [Google Scholar] [CrossRef] [Green Version]
- Wang, X.V.; Kemény, Z.; Váncza, J.; Wang, L. Human-Robot collaborative assembly in cyber-physical production: Classification framework and implementation. CIRP Ann. 2017, 66, 5–8. [Google Scholar] [CrossRef] [Green Version]
- Kaber, D.B. Issues in human-automation interaction modeling: Presumptive aspects of frameworks of types and levels of automation. J. Cogn. Eng. Decis. Mak. 2018, 12, 7–24. [Google Scholar] [CrossRef]
- Murthy, D.N.P. Confiabilidade e garantia de produto: Visão geral e pesquisas futuras. Product reliability and warranty: An overview and future research. SciELO Braz. 2007, 17, 426–434. [Google Scholar]
- Niu, J.; Geng, H.; Zhang, Y.; Du, X. Relationship between automation trust and operator performance for the novice and expert in spacecraft rendezvous and docking (RVD). Appl. Ergon. 2017, 71, 1–8. [Google Scholar] [CrossRef] [PubMed]
- Kaber, D.B.; Endsley, M.R. The effects of level of automation and adaptive automation on human performance, situation awareness and workload in a dynamic control task. Theor. Issues Ergon. Sci. 2004, 5, 113–153. [Google Scholar] [CrossRef]
- Brynjolfsson, E.; McAfee, A. The Second Machine Age: Work, Progress, and Prosperity in a Time of Brilliant Technologies; WW. Norton & Company: New York, NY, USA; London, UK, 2016; pp. 15–25. [Google Scholar]
- Giuliani, M.; Lenz, C.; Müller, T.; Rickert, M.; Knoll, A. Design principles for safety in human-robot interaction. Int. J. Soc. Robot. 2010, 2, 253–274. [Google Scholar] [CrossRef]
- Lenz, A.; Skachek, S.; Hamann, K.; Steinwender, J.; Pipe, A.G.; Melhuish, C. The BERT2 infrastructure: An integrated system for the study of human-robot interaction. In Proceedings of the 10th IEEE-RAS International Conference on Humanoid Robots, Nashville, TN, USA, 6–8 December 2010; pp. 346–351. [Google Scholar] [CrossRef]
- Moniz, A.B.; Krings, B.-J. Robots Working with humans or humans working with robots? Searching for social dimensions in new human-robot interaction in industry. Societies 2016, 6, 23. [Google Scholar] [CrossRef] [Green Version]
- Moniz, A.B. Human Resource Management and Technological Challenges; Springer: Berlin/Heidelberg, Germany, 2014; pp. 123–131. [Google Scholar] [CrossRef]
- Gutman, D. Levels of Automation in Human-Robot Collaboration. Master’s Thesis, Industrial Engineering and Management, Ben-Gurion University of the Negev, Beer Sheva, Israel, 2020. [Google Scholar]
- Markfeld, N. Feedback for Human-Robot Collaboration. Master’s Thesis, Industrial Engineering and Management, Ben-Gurion University of the Negev, Beer Sheva, Israel, 2020. [Google Scholar]
- Broadbent, E. Interactions with robots: The truths we reveal about ourselves. Annu. Rev. Psychol. 2017, 68, 627–652. [Google Scholar] [CrossRef] [Green Version]
- Acemoglu, D.; Restrepo, P. Demographics and Robots. 2018. Available online: http://www.nber.org/papers/w24421 (accessed on 9 August 2021).




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Workload | |||||
|---|---|---|---|---|---|
| Low Workload | Medium Workload 1 Task Complexity | Medium Workload 2 Secondary Task | High Workload | ||
| Level of Automation (LOA) | Low LOA | Condition 1a The user chooses via a GUI screen which color of cube the robot will bring him. The user concentrates only on the main task, without reference to the numbers written on the cubes. | Condition 2a The user chooses via a GUI screen which color of cube the robot will bring him. The user concentrates only on the main task, which has increased complexity (through the numbers written on the cubes). | Condition 3a The user chooses via a GUI screen which color of cube the robot will bring him. The user performs a main + secondary task simultaneously, without reference to the numbers written on the cubes. | Condition 4a The user chooses via a GUI screen which color of cube the robot will bring him. The user concentrates on performing a main + secondary task simultaneously, with an increased task complexity (must refer to the numbers written on the cubes). |
| High LOA | Condition 1b The robot brings the cubes to the user in a predefined order. The user concentrates only on the main task, without reference to the numbers written on the cubes. | Condition 2b The robot brings the cubes to the user in a predefined order. The user concentrates only on the main task, which has increased complexity (through the numbers written on the cubes). | Condition 3b The robot brings the cubes to the user in a predefined order. The user concentrates on performing a main + secondary task simultaneously, without reference to the numbers written on the cubes. | Condition 4b The robot brings the cubes to the user in a predefined order. The user concentrates on performing a main + secondary task simultaneously, with increased task complexity (must refer to the numbers written on the cubes). | |
| Groups | QoT Execution | Usability | User Preferences |
|---|---|---|---|
| LWL|MWL1 | 0.858 | 0.297 | 0.038 * Low LOA > High LOA |
| LWL|MWL2 | 0.88 | 0.03 * Low LOA: Low < MWL2 High LOA: Low < MWL2 | 0.089 |
| LWL|High | 0.004 * Low LOA: LWL > HWL High LOA: LWL = HWL | 0.059 | 0.956 |
| MWL1|MWL2 | 0.1 | 0 < 0.001 * Low LOA: MWL1 < MWL2 High LOA: MWL1 < MWL2 | 0 < 0.001 * Low LOA < High LOA |
| MWL1|HWL | 0.042 * Low LOA: MWL1 > HWL High LOA: MWL1 < HWL | 0 < 0.001 * Low LOA: MWL1 < HWL High LOA: MWL1 < HWL | 0.008 * Low LOA > High LOA |
| MWL2|HWL | 0.033 * Low LOA: MWL2 > HWL High LOA: MWL2 = HWL | 0.782 | 0.242 |
| Metrics | Constituent Measures | Significant Effects | Finding |
|---|---|---|---|
| QoT execution | Efficiency; effectiveness | LOA (p < 0.001); workload (p < 0.001); LOA*workload (p = 0.002) | LOA and workload had significant effect on the QoT execution. The QoT execution was higher at the high LOA. |
| Usability | QoT execution measures; perceived ease of use, perceived reliability, perceived workload | LOA (p < 0.001); Workload (p < 0.001) | The usability was higher at high LOA. The workload had more influence on the constituent variables, with the LWL resulting in higher usability. |
| User preferences | User choices regarding LOA modes | Workload (p < 0.001) | Most of the participants preferred the high LOA for both LWL and HWL. In the medium workload levels, the low LOA was preferred for the MWL1 where some task complexity was involved |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gutman, D.; Olatunji, S.; Edan, Y. Evaluating Levels of Automation in Human–Robot Collaboration at Different Workload Levels. Appl. Sci. 2021, 11, 7340. https://doi.org/10.3390/app11167340
Gutman D, Olatunji S, Edan Y. Evaluating Levels of Automation in Human–Robot Collaboration at Different Workload Levels. Applied Sciences. 2021; 11(16):7340. https://doi.org/10.3390/app11167340
Chicago/Turabian StyleGutman, Dana, Samuel Olatunji, and Yael Edan. 2021. "Evaluating Levels of Automation in Human–Robot Collaboration at Different Workload Levels" Applied Sciences 11, no. 16: 7340. https://doi.org/10.3390/app11167340
APA StyleGutman, D., Olatunji, S., & Edan, Y. (2021). Evaluating Levels of Automation in Human–Robot Collaboration at Different Workload Levels. Applied Sciences, 11(16), 7340. https://doi.org/10.3390/app11167340