
Actuator-Integrated Fault Estimation and Fault Tolerant Control for Electric Power Steering System of Forklift


Abstract
:1. Introduction
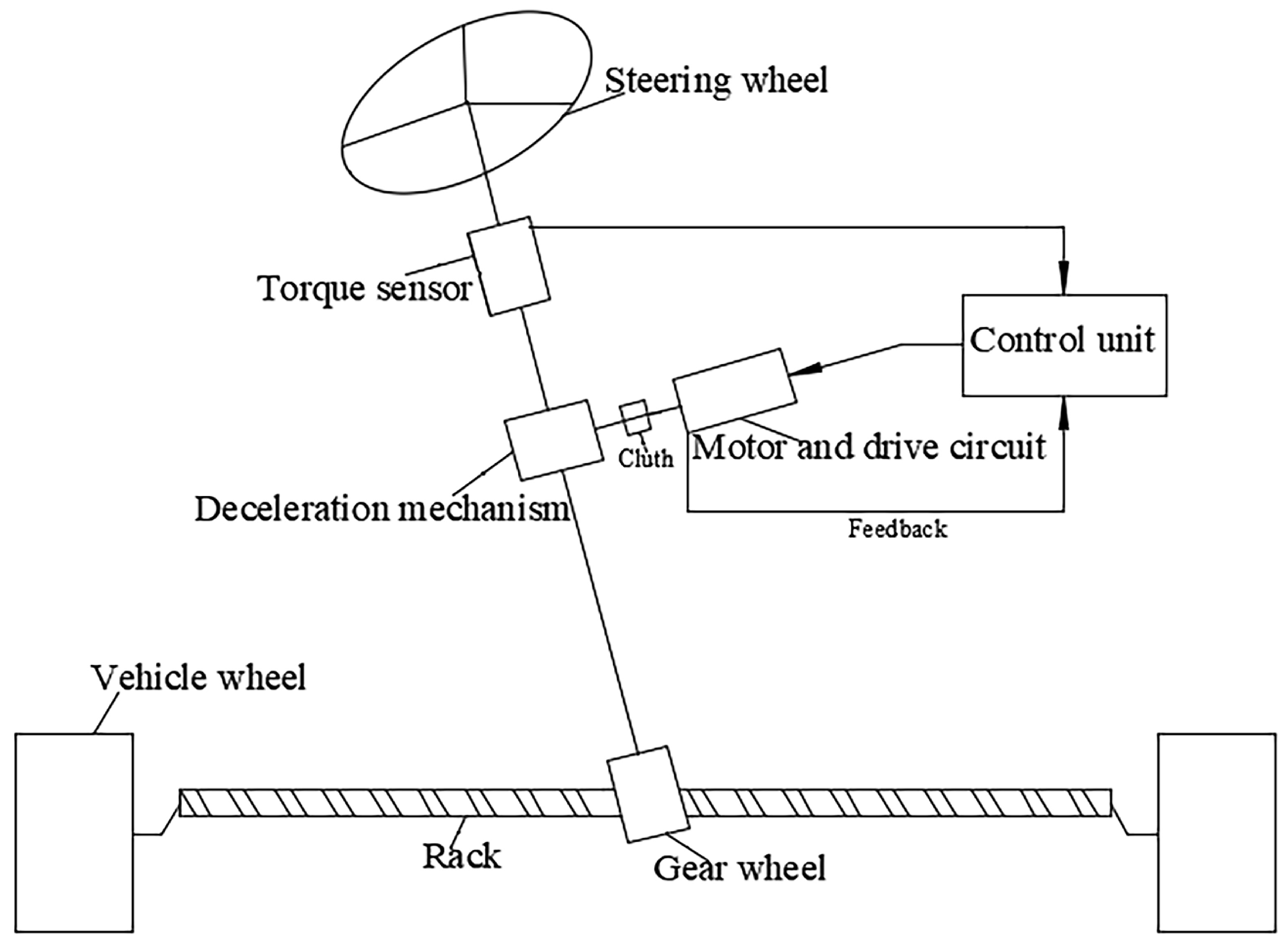
2. Dynamics Model of Forklift EPS System
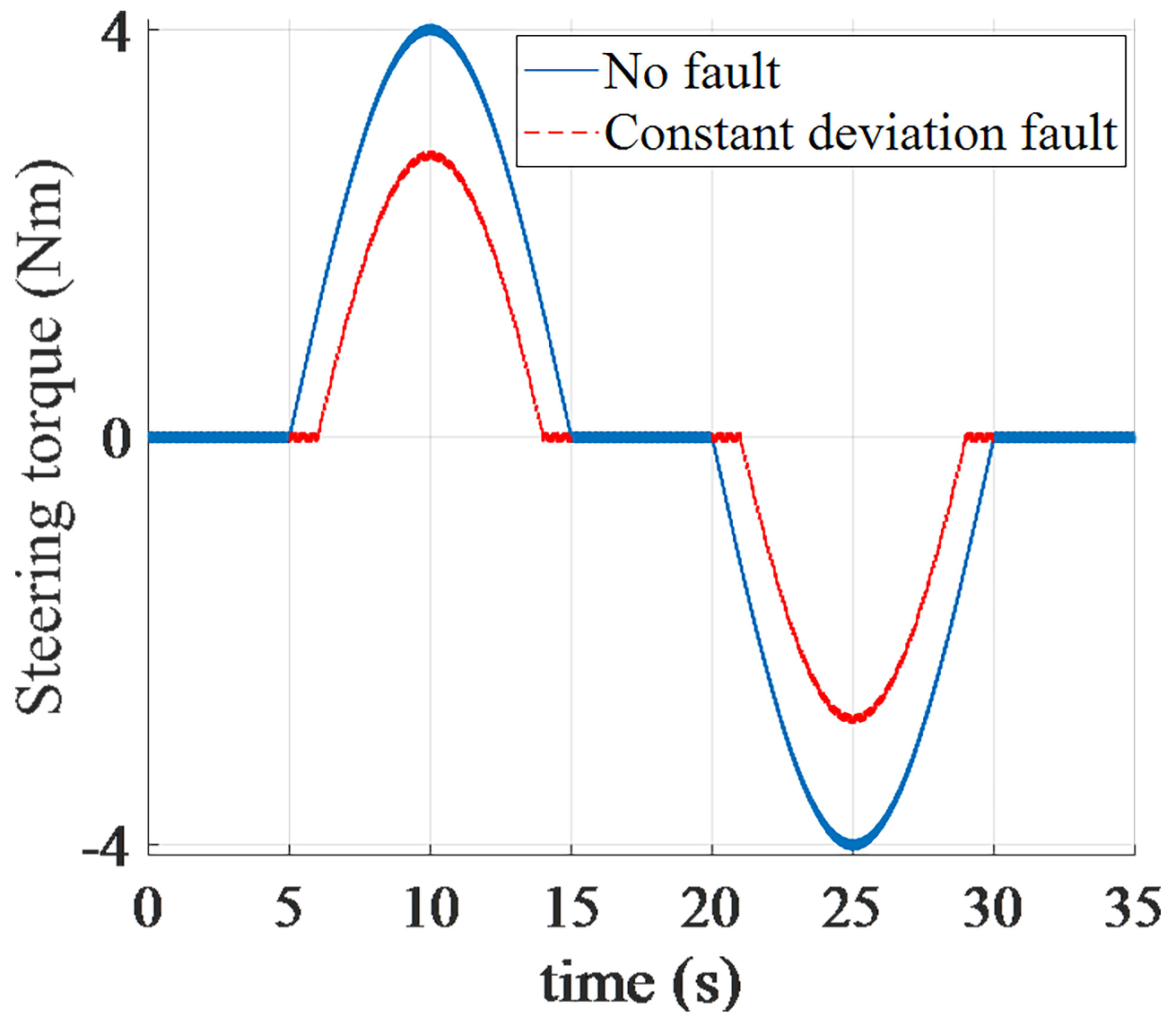
3. Actuator Fault Model of EPS System
- if the motor temperature is too high, it may lead to partial faults or stuck faults;
- if the air is damp, dusty and polluted, it may lead to partial faults or stuck faults;
- if there is no plug, the motor is broken, the motor is locked, it will lead to stuck faults;
- if the connection shorts between the wire harness end line and the ground, it will lead to stuck faults;
- if the converter is short circuited or open circuited, it will lead to stuck faults;
- if the clearance of the turbine worm is too large, it will lead to partial faults;
- if the tooth surface of the turbine worm is worn and the gear and rack are worn, it will lead to partial faults.
- when, it is in a normal state and the actuator has no failure;
- when, it is a constant deviation fault and belongs to partial failure;
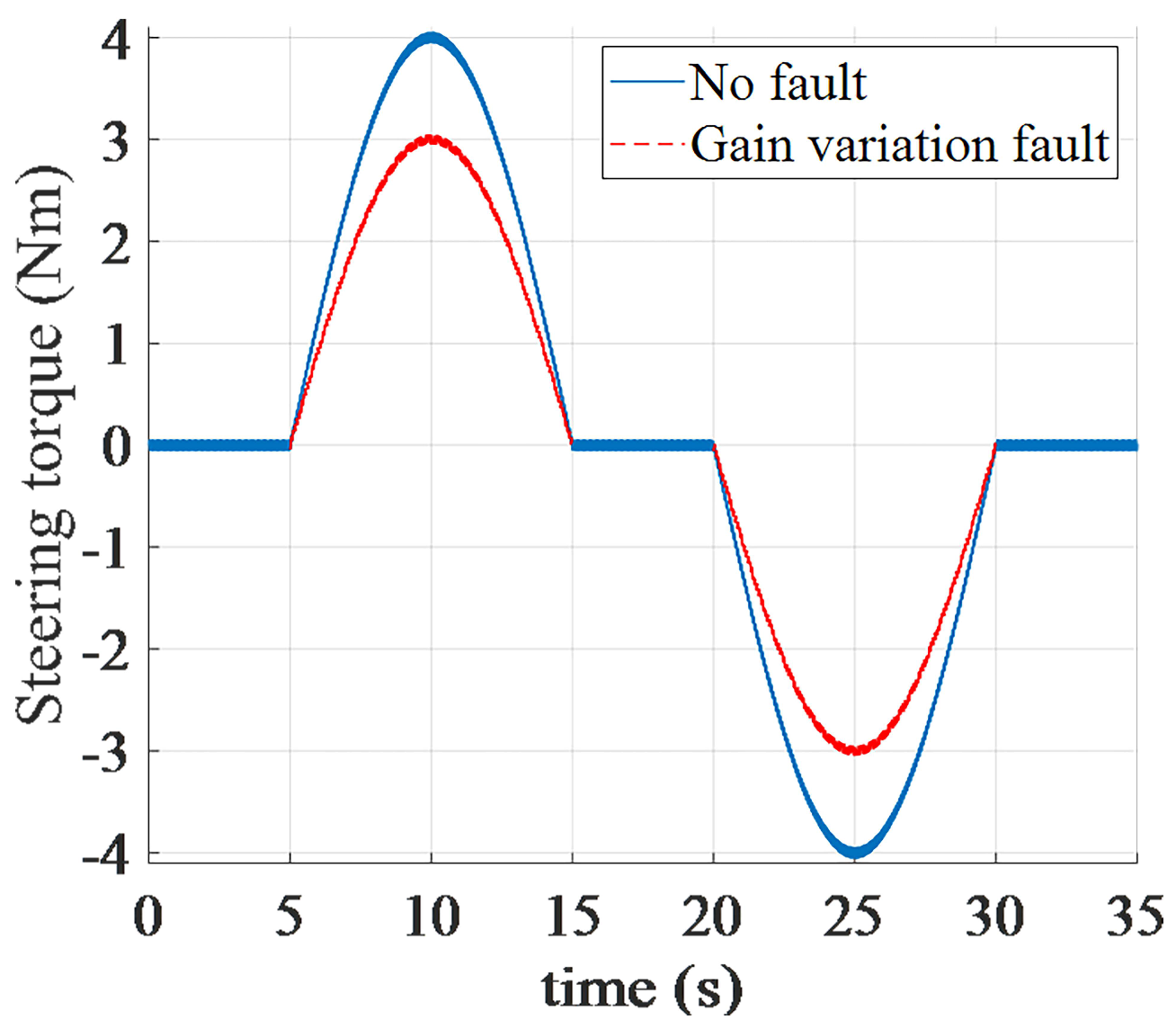
- when, in this case, it is a gain variation fault and belongs to a partial failure;
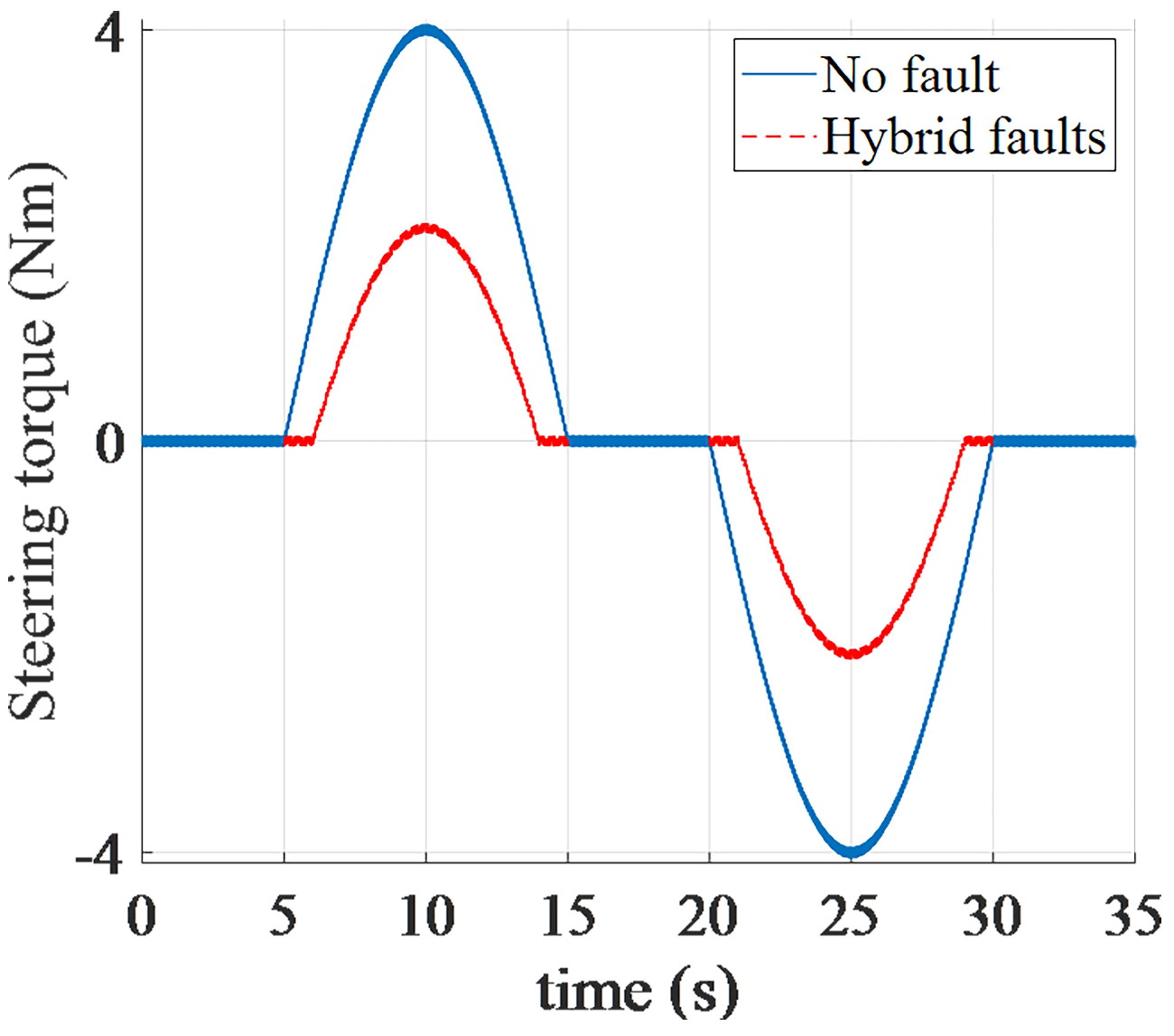
- when , in this case, it is a mixed fault with constant deviation and gain variation and belonging to partial failure;
- when, then the actuator has no output and is in a complete failure;
- when, the output of the actuator is a constant.
4. Integrated FE/FTC
4.1. System Description
4.2. FE Design
4.3. Adaptive Sliding Mode FTC Design
4.4. Integrated Synthesis of FE/FTC
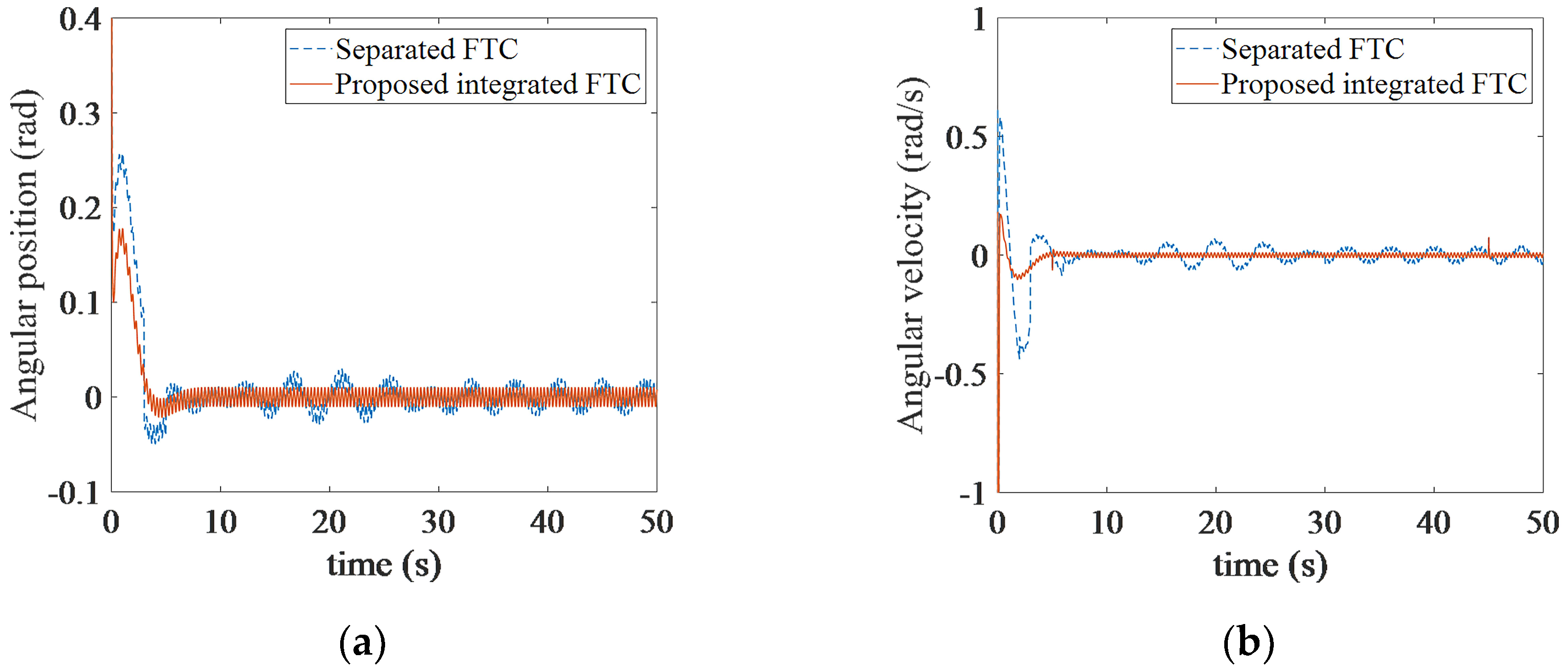
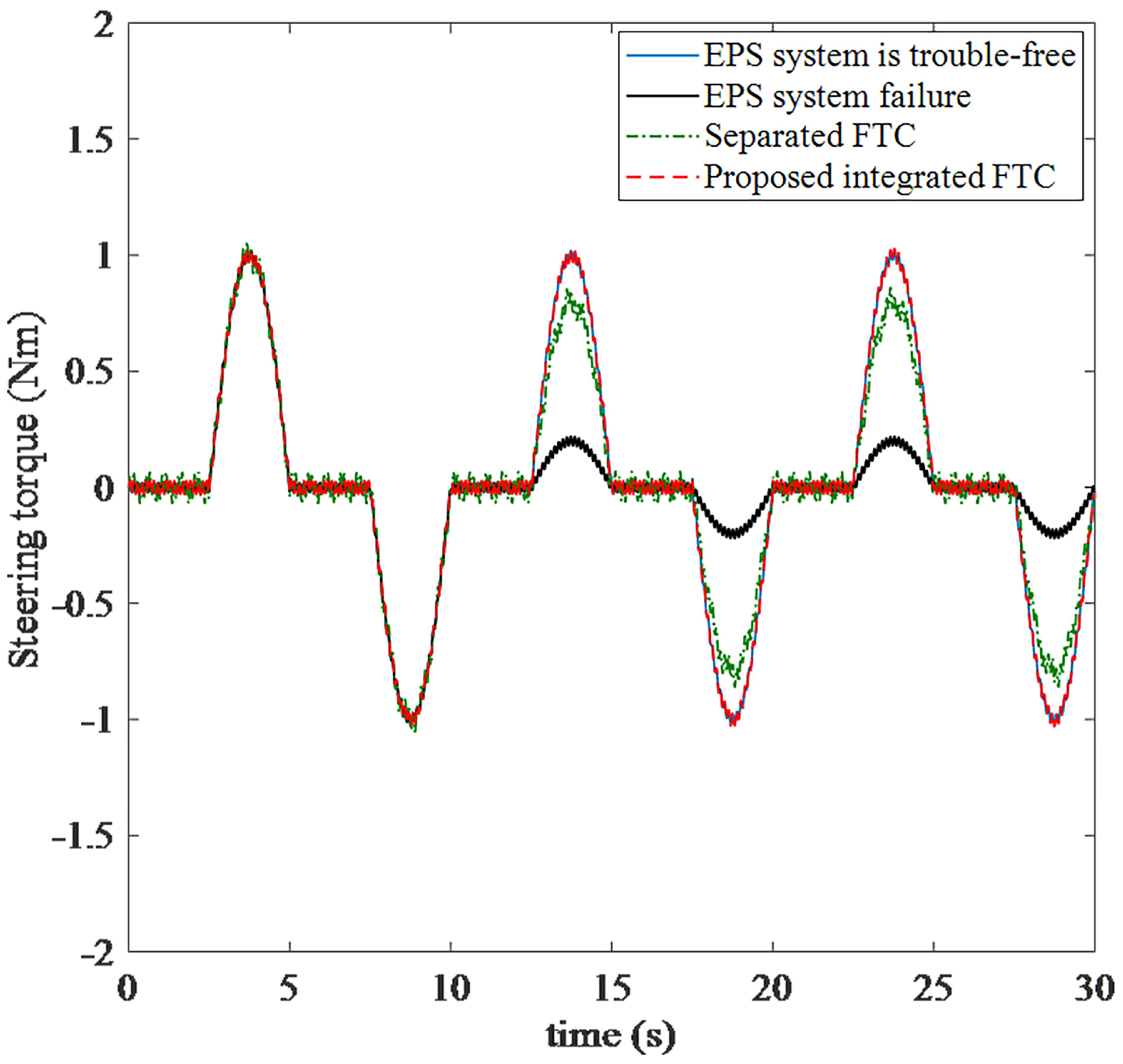
5. Experimental Verification
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Joubaneh Eshagh, F.; Oumar, B. A comprehensive study of vibration suppression and optimization of an electric power steering system. SAE Int. J. Veh. Dyn. Stab. NVH 2021, 5, 81–97. [Google Scholar] [CrossRef]
- Zhang, Z.L.; Xiao, B.X. Sensor Fault diagnosis and fault tolerant control for forklift based on sliding mode theory. IEEE Access 2020, 8, 84858–84866. [Google Scholar] [CrossRef]
- Tao, J.; Xiao, B.X. Fault tolerant control of actuator and sensor in EPS system of electric forklift. J. Electron. Meas. Instrum. 2019, 33, 85–93. [Google Scholar]
- Lan, J.L.; Patton, R.J. Integrated fault estimation and fault-tolerant control for Lipschitz nonlinear systems. Int. J. Robust Nonlinear Control 2017, 27, 761–780. [Google Scholar] [CrossRef]
- Lan, J.L.; Patton, R.J. A new strategy for integration of fault estimation within fault-tolerant control. Automatica 2016, 69, 48–59. [Google Scholar] [CrossRef]
- Zhao, X.Y.; Zong, Q.; Tian, B.; Liu, W.J. Integrated fault estimation and fault-tolerant tracking control for Lipschitz nonlinear Multiagent Systems. IEEE Trans. Cybern. 2020, 50, 678–688. [Google Scholar] [CrossRef]
- Ghimire, R.; Sankavaram, C.; Ghahari, A.; Pattipati, K. Integrated model-based and data-driven fault detection and diagnosis approach for automotive electric power steering system. IEEE Autotestcon 2011, 70–77. [Google Scholar] [CrossRef]
- Gao, Z.F.; Zhou, Z.P.; Jiang, G.P.; Qian, M.S.; Lin, J.X. Active fault tolerant control scheme for satellite attitude systems: Multiple Actuator Faults Case. Int. J. Control. Autom. Syst. 2018, 16, 1794–1804. [Google Scholar] [CrossRef]
- Yuan, Y.; Zhang, T.H.; Lin, Z.L.; Zhao, Z.W.; Zhang, X.L. Actuator fault tolerant control of variable cycle engine using sliding mode control scheme. Actuators 2021, 10, 24. [Google Scholar] [CrossRef]
- Liu, C.; Qian, K.; Li, Y.H.; Ding, Q. Design of integrated robust active fault tolerant controller based on LMI. Control. Decis. 2018, 33, 53–59. [Google Scholar]
- Navarbaf, A.; Javad Khosrowjerdi, M. Fault-tolerant controller design with fault estimation capability for a class of nonlinear systems using generalized Takagi-Sugeno fuzzy model. Trans. Inst. Meas. Control. 2019, 41, 4218–4229. [Google Scholar] [CrossRef]
- Qin, Y.F.; Shi, X.J.; Zhai, Y.Y.; Han, L.; Long, Y.F. Based on the ASTSMO and UIO the method of fault estimation. J. Beijing Univ. Aeronaut. Astronaut. 2020, 46, 2253–2263. [Google Scholar]
- Mousavi, A.; Markazi, M.; Amir, H.D. A predictive approach to adaptive fuzzy sliding-mode control of under-actuated nonlinear systems with input saturation. Int. J. Syst. Sci. 2021, 52, 1599–1617. [Google Scholar] [CrossRef]
- Liu, Y.; Wang, Z.D.; Zhou, D.H. State estimation and fault reconstruction with integral measurements under partially decoupled disturbances. IET Control. Theory Appl. 2017, 12, 1520–1526. [Google Scholar] [CrossRef]
- Huang, C.; Naghdy, F.; Du, H. Observer-based fault-tolerant controller for uncertain steer-by-wire systems using the delta operator. IEEE Trans. Mechatron. 2018, 23, 2587–2598. [Google Scholar] [CrossRef]
- Garramiola, F.; del Olmo, J.; Poza, J.; Madina, P.; Almandoz, G. Integral sensor fault detection and isolation for railway traction drive. Sensors 2018, 18, 1543. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Djeziri, M.A.; Merzouki, R.; Bouamama, B.O.; Ouladsine, M. Fault diagnosis and fault-tolerant control of an electric vehicle overactuated. IEEE Trans. Veh. Technol. 2013, 62, 986–994. [Google Scholar] [CrossRef]
- Wang, Z.H.; Shen, Y.; Zhang, X.L. Actuator fault estimation for a class of nonlinear descriptor systems. Int. J. Syst. Sci. 2014, 45, 487–496. [Google Scholar] [CrossRef]
- Yan, Y.; Wu, L.B.; Zhao, N.N.; Zhang, R.Y. Adaptive asymptotic tracking fault-tolerant control of uncertain nonlinear systems with Actuator Failures and Event-triggered Inputs. Int. J. Control. Autom. Syst. 2021, 19, 1241–1251. [Google Scholar] [CrossRef]
- Tavasolipour, E.; Poshtan, J.; Shamaghdari, S. A new approach for robust fault estimation in nonlinear systems with state-coupled disturbances using dissipativity theory. ISA Trans. 2021, 114, 31–43. [Google Scholar] [CrossRef]
- Yang, J.Q.; Zhu, F.L.; Wang, X.; Bu, X.H. Robust sliding-mode observer-based sensor fault estimation, actuator fault detection and isolation for uncertain nonlinear systems. Int. J. Control. Autom. Syst. 2015, 13, 1037–1046. [Google Scholar] [CrossRef]
- Ljaz, S.; Chen, F.Y.; Tariq Hamayun, M. A New Actuator Fault-Tolerant Control for Lipschitz Nonlinear System Using Adaptive Sliding Mode Control Strategy; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2021; Volume 31, pp. 2305–2333. [Google Scholar]
- Odgaard, P.F.; Stoustrup, J. Fault Tolerant Control of Wind Turbines using Unknown Input Observers. IFAC Proc. Vol. 2012, 45, 313–318. [Google Scholar] [CrossRef] [Green Version]
- Witczak, M.; Buciakowski, M.; Aubrun, C. Predictive actuator fault-tolerant control under ellipsoidal bounding. Int. J. Adapt. Control Signal Process. 2016, 30, 375–392. [Google Scholar] [CrossRef]
- Kheloufi, H.; Zemouche, A.; Bedouhene, F.; Souley-Ali, H. A robust H∞ observer-based stabilization method for systems with uncertain parameters and Lipschitz nonlinearities. Int. J. Robust Nonlinear Control. 2016, 26, 1962–1979. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Description | Values or Units |
|---|---|---|
| Steering column angle | rad | |
| Motor angle | rad | |
| DC motor torque constant | 0.0506 (N∙m)/A | |
| Back electromotive force constant | 0.051 (V∙s/rad) | |
| The mass of the steering rack | 32 kg | |
| The damping of the steering rack | 3620 (N∙m)/rad | |
| The stiffness of the steering rack | 46,000 N/m | |
| The rotational inertia of the steering column | 0.089 kg | |
| The damping of the steering column | 0.361 (N∙m∙s)/rad | |
| The stiffness of the steering column | 115 (N∙m)/rad | |
| The rotational inertia of the DC motor | 0.00045 kg∙m2 | |
| The damping of the DC motor | 0.0033 (N∙m∙s)/rad | |
| The current of the DC motor | A | |
| The resistance of the DC motor | 0.345 Ω | |
| The inductance of the DC motor | 0.00023 H | |
| DC motor voltage | V | |
| Steering wheel torque | N∙m | |
| Steering resistance moment | N∙m | |
| The radius of steering gear wheel | 0.4 m | |
| The transmission ratio of deceleration mechanism | 16.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Su, X.; Xiao, B. Actuator-Integrated Fault Estimation and Fault Tolerant Control for Electric Power Steering System of Forklift. Appl. Sci. 2021, 11, 7236. https://doi.org/10.3390/app11167236
Su X, Xiao B. Actuator-Integrated Fault Estimation and Fault Tolerant Control for Electric Power Steering System of Forklift. Applied Sciences. 2021; 11(16):7236. https://doi.org/10.3390/app11167236
Chicago/Turabian StyleSu, Xiangxiang, and Benxian Xiao. 2021. "Actuator-Integrated Fault Estimation and Fault Tolerant Control for Electric Power Steering System of Forklift" Applied Sciences 11, no. 16: 7236. https://doi.org/10.3390/app11167236
APA StyleSu, X., & Xiao, B. (2021). Actuator-Integrated Fault Estimation and Fault Tolerant Control for Electric Power Steering System of Forklift. Applied Sciences, 11(16), 7236. https://doi.org/10.3390/app11167236