
Remaining Useful Life Prediction of Broken Rotor Bar Based on Data-Driven and Degradation Model




Abstract
:1. Introduction
2. Related Works
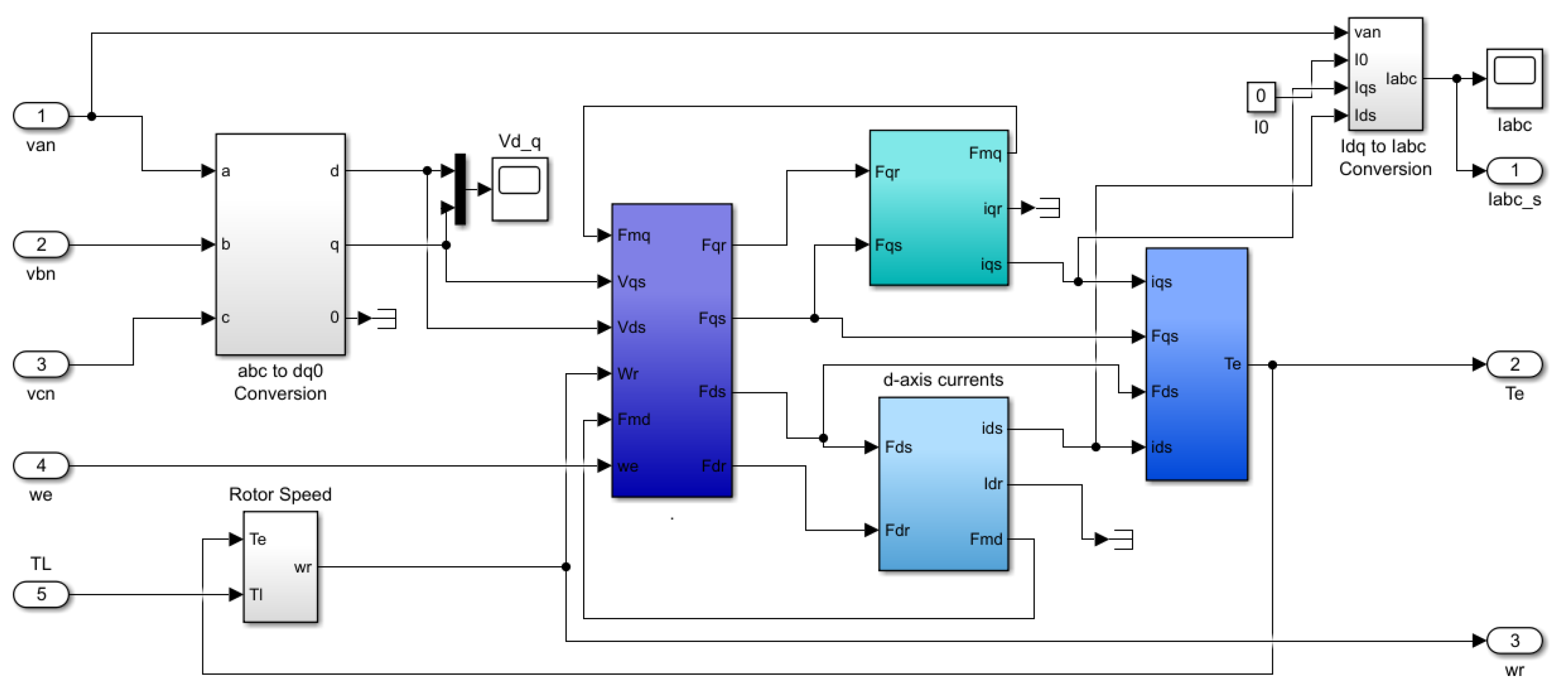
3. Synthetic Failure Data Sets Using Matlab/Simulink
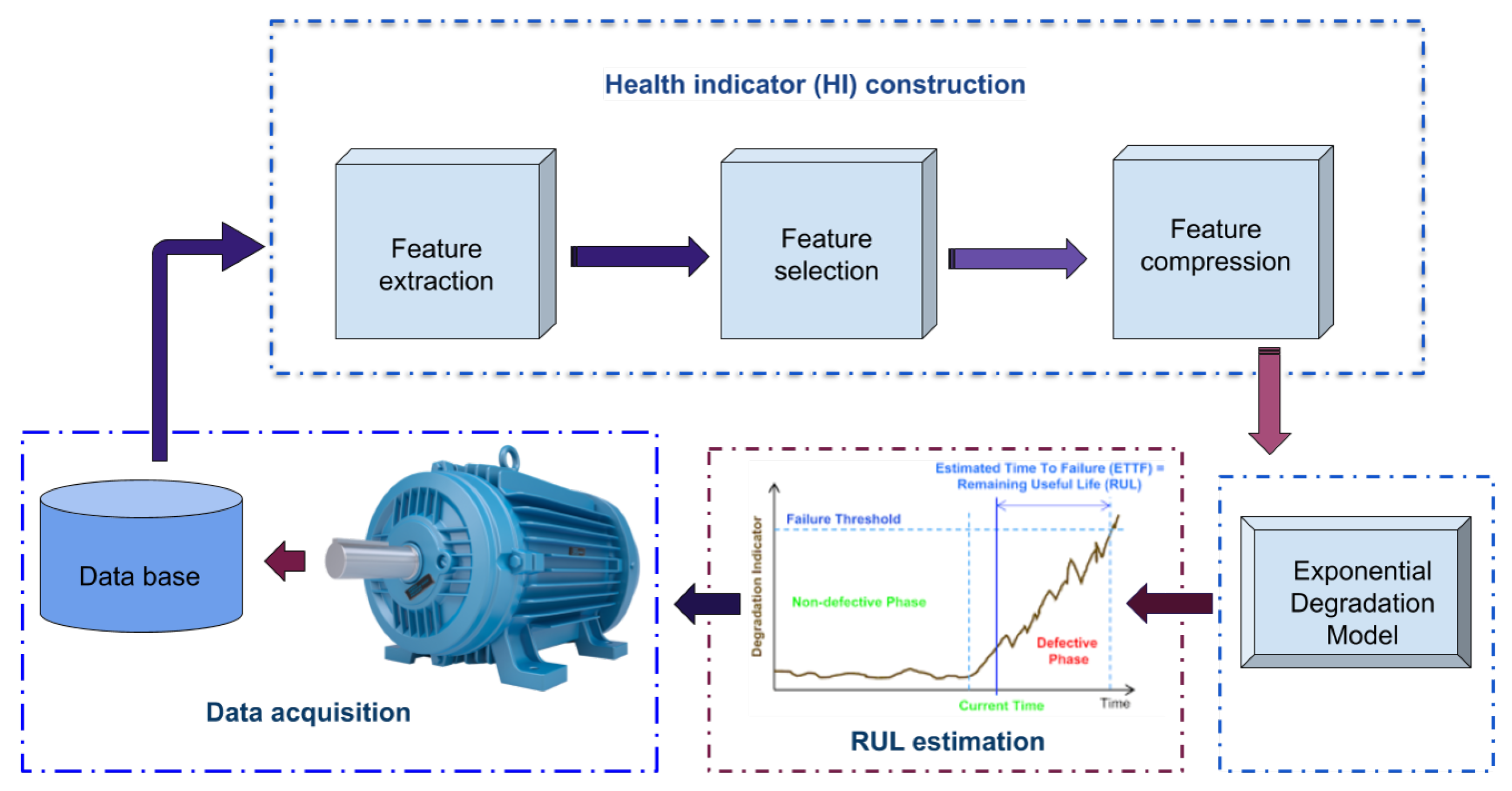
4. Proposed Prognostics Methodology
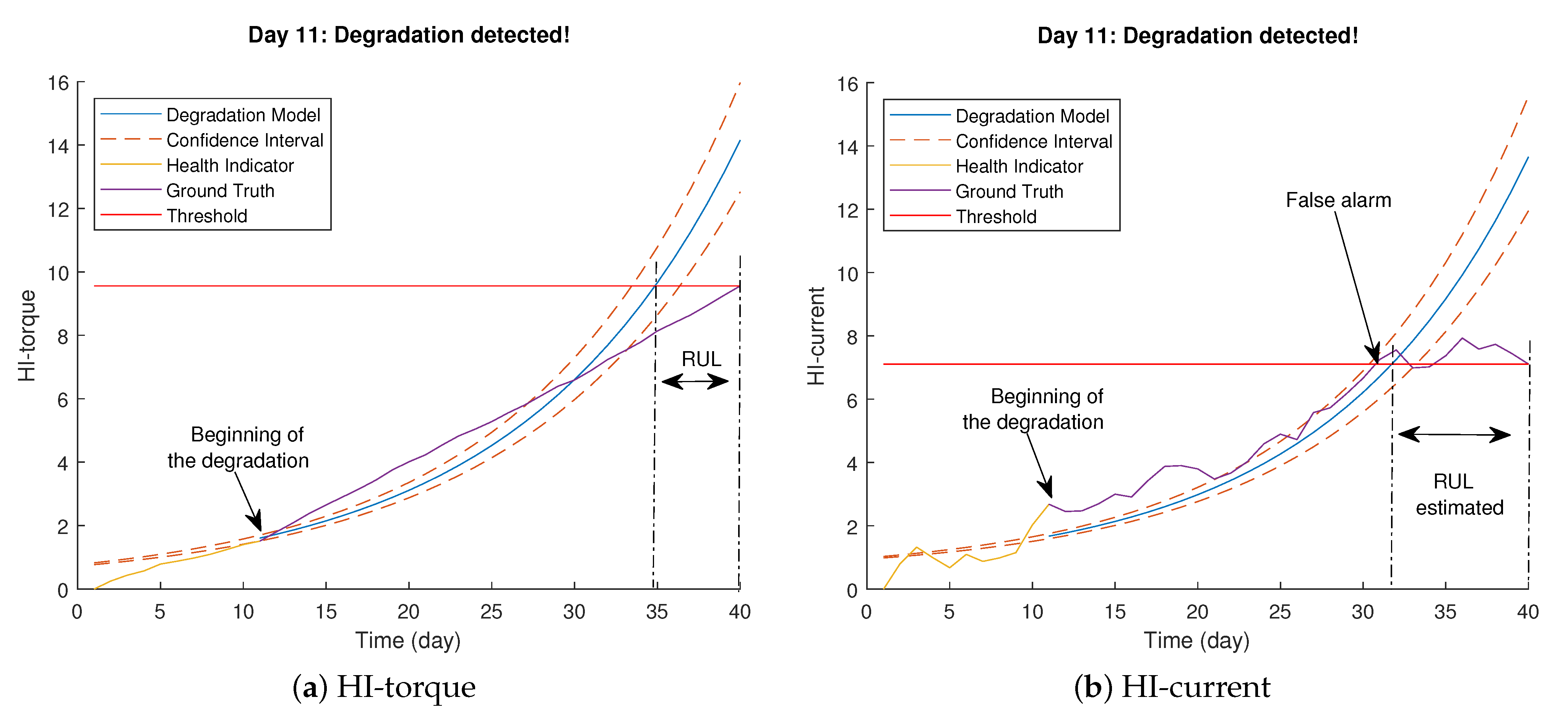
RUL Estimation Based on the Exponential Degradation Model
5. Synthetic Data Manipulation
5.1. Data Acquisition
5.2. Feature Extraction
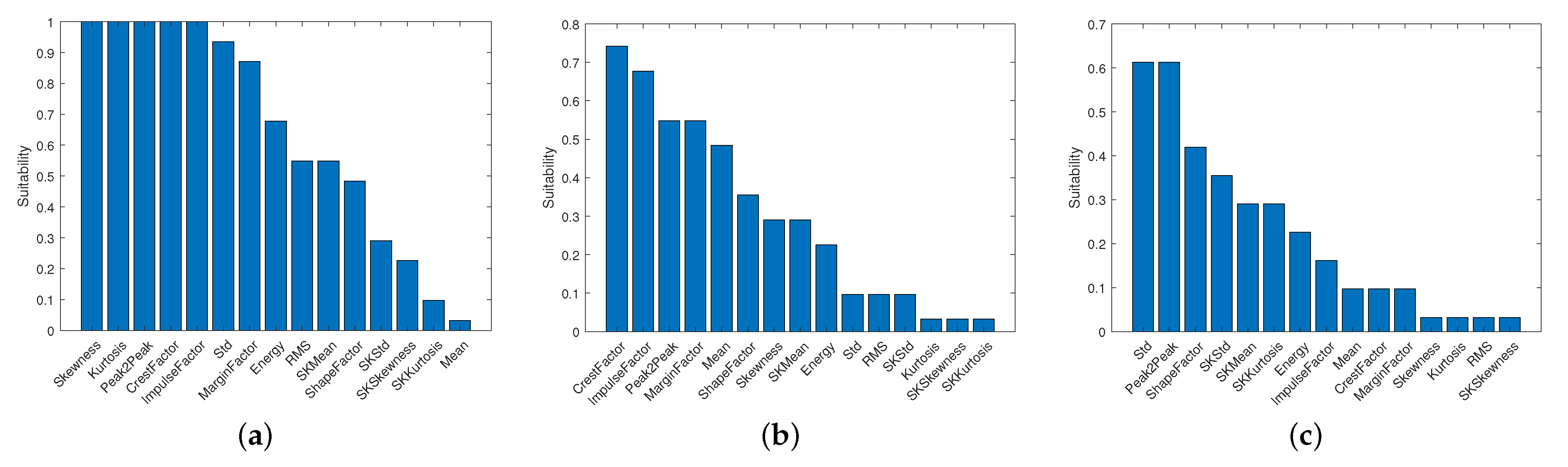
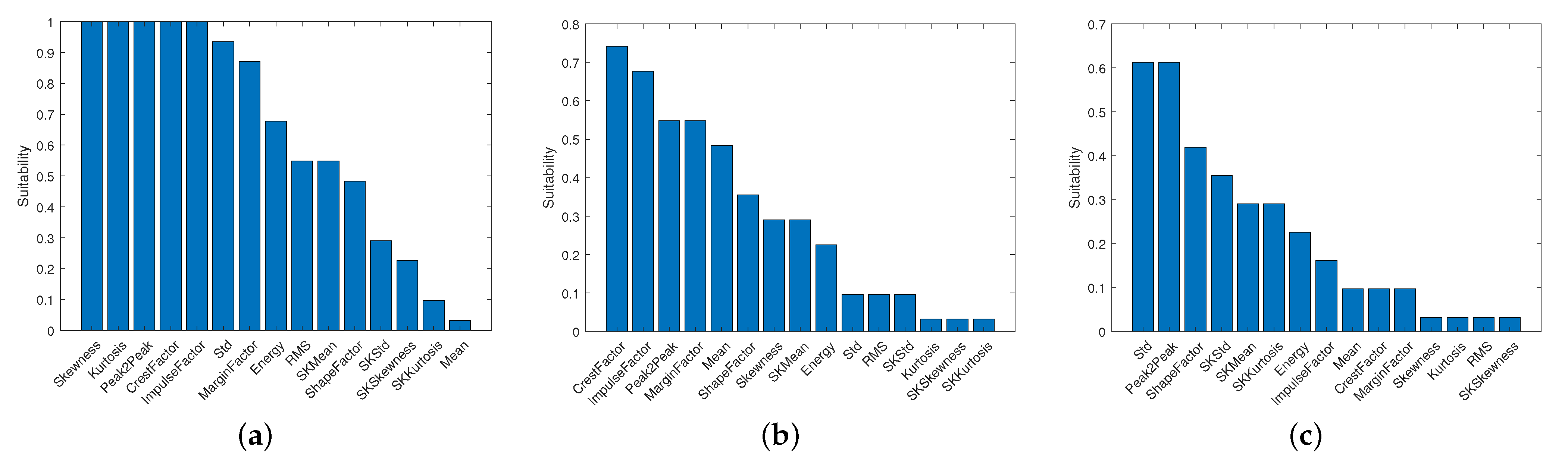
5.3. Feature Selection
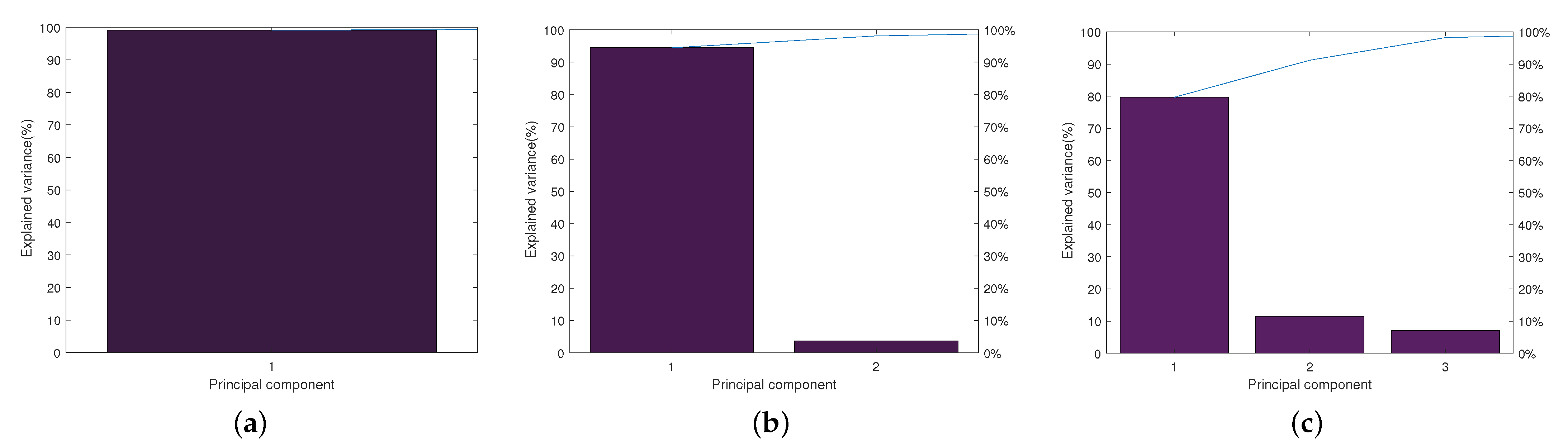
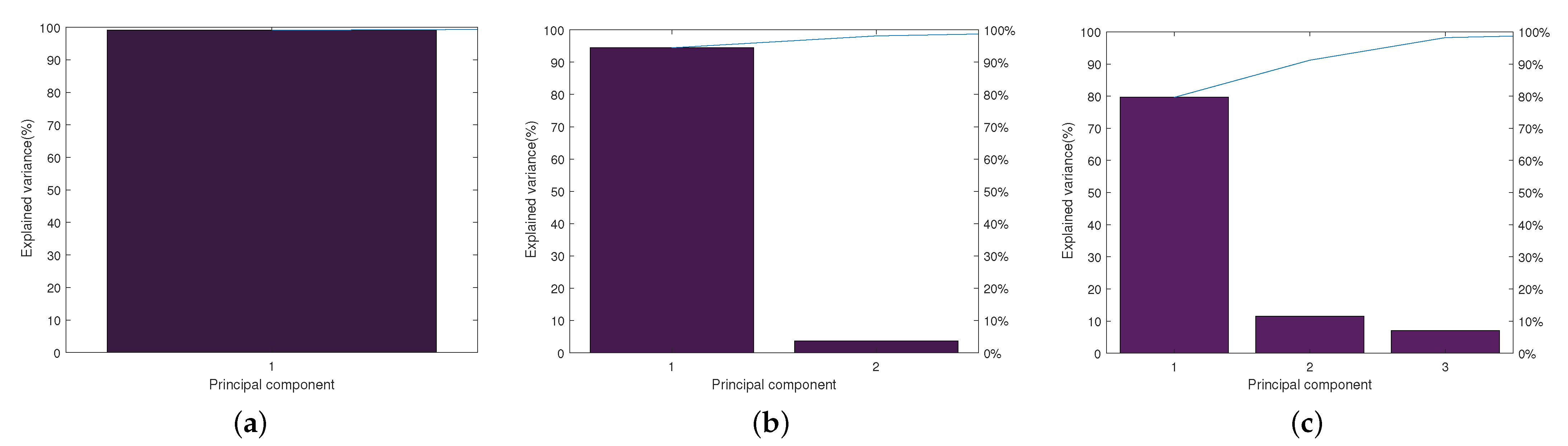
5.4. Feature Compression
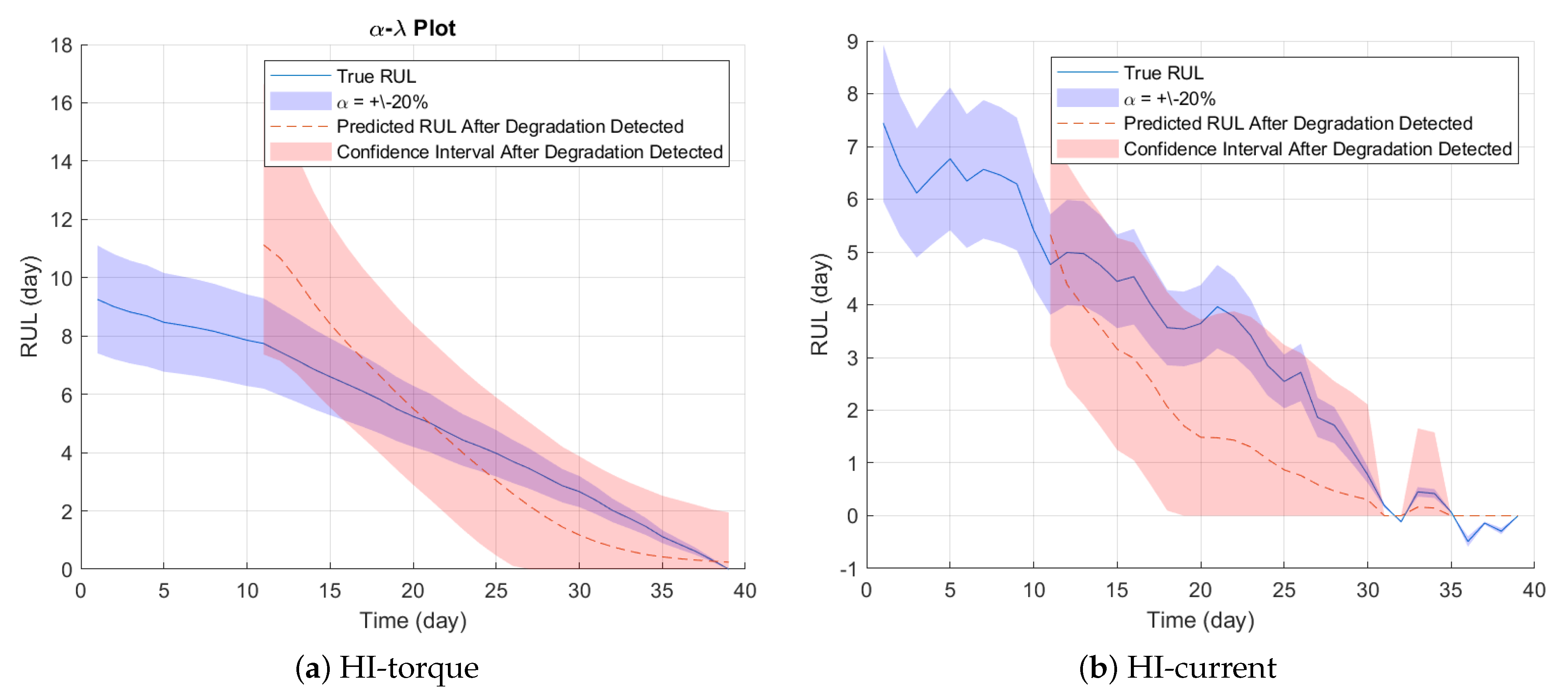
6. Prognosis Results
7. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Krolczyk, G.; Li, Z.; Antonino Daviu, J.A. Fault diagnosis of rotating machine. Appl. Sci. 2020, 10, 1961. [Google Scholar] [CrossRef] [Green Version]
- Glowacz, A. Recognition of acoustic signals of loaded synchronous motor using FFT, MSAF-5 and LSVM. Arch. Acoust. 2015, 40, 197–203. [Google Scholar] [CrossRef] [Green Version]
- Glowacz, A.; Glowacz, W.; Kozik, J.; Piech, K.; Gutten, M.; Caesarendra, W.; Liu, H.; Brumercik, F.; Irfan, M.; Faizal Khan, Z. Detection of Deterioration of Three-phase Induction Motor using Vibration Signals. Meas. Sci. Rev. 2019, 19, 241–249. [Google Scholar] [CrossRef] [Green Version]
- He, C.; Li, H.; Li, Z.; Zhao, X. An improved bistable stochastic resonance and its application on weak fault characteristic identification of centrifugal compressor blades. J. Sound Vib. 2019, 442, 677–697. [Google Scholar] [CrossRef]
- Cao, L.; Qian, Z.; Zareipour, H.; Wood, D.; Mollasalehi, E.; Tian, S.; Pei, Y. Prediction of remaining useful life of wind turbine bearings under non-stationary operating conditions. Energies 2018, 11, 3318. [Google Scholar] [CrossRef] [Green Version]
- Zhao, Z.; Liang, B.; Wang, X.; Lu, W. Remaining useful life prediction of aircraft engine based on degradation pattern learning. Reliab. Eng. Syst. Saf. 2017, 164, 74–83. [Google Scholar] [CrossRef]
- Li, Z.; Wu, D.; Hu, C.; Terpenny, J. An ensemble learning-based prognostic approach with degradation-dependent weights for remaining useful life prediction. Reliab. Eng. Syst. Saf. 2019, 184, 110–122. [Google Scholar] [CrossRef]
- Ahmadzadeh, F.; Lundberg, J. Remaining useful life estimation. Int. J. Syst. Assur. Eng. Manag. 2014, 5, 461–474. [Google Scholar] [CrossRef]
- Jiang, Y.; Zhu, H.; Li, Z.; Peng, Z. The nonlinear dynamics response of cracked gear system in a coal cutter taking environmental multi-frequency excitation forces into consideration. Nonlinear Dyn. 2016, 27, 65–103. [Google Scholar] [CrossRef]
- Yang, K.; Hu, B.; Malekian, R.; Li, Z. An improved control-limit-based principal component analysis method for condition monitoring of marine turbine generators. J. Mar. Eng. Technol. 2016, 19, 249–256. [Google Scholar] [CrossRef]
- Yan, X.; Xu, X.; Sheng, C.; Yuan, C.; Li, Z. Intelligent wear mode identification system for marine diesel engines based on multi-level belief rule base methodology. Meas. Sci. Technol. 2017, 29, 015110. [Google Scholar] [CrossRef]
- Zhang, C.; Peng, Z.; Chen, S.; Li, Z.; Wang, J. A gearbox fault diagnosis method based on frequency-modulated empirical mode decomposition and support vector machine. Proc. Inst. Mech. Eng. Part C 2018, 29, 369–380. [Google Scholar] [CrossRef]
- Krolczyk, J.B.; Krolczyk, G.M.; Legutko, S.; Napiorkowski, J.; Hloch, S.; Foltys, J.; Tama, E. Material Flow Optimization—A Case Study in Automotive Industry. Teh. Vjesn. 2015, 22, 1447–1456. [Google Scholar]
- Coro, A.; Macareno, L.M.; Aguirrebeitia, J.; López de Lacalle, L.N. A Methodology to Evaluate the Reliability Impact of the Replacement of Welded Components by Additive Manufacturing Spare Parts. Metals 2019, 9, 932. [Google Scholar] [CrossRef] [Green Version]
- Dominguez, S.; Solomon, L.; Baggott, S.; Gray, S.; Ireland, A. Electrical Rotating Machine APM Overview; GE Power White Paper; General Electric Company: Boston, MA, USA, 2018. [Google Scholar]
- Coro, A.; Abasolo, M.; Aguirrebeitia, J.; López de Lacalle, L.N. Inspection scheduling based on reliability updating of gas turbine welded structures. Adv. Mech. Eng. 2019, 11, 1. [Google Scholar] [CrossRef] [Green Version]
- Bellini, A.; Filippetti, F.; Tassoni, C.; Capolino, G.A. Advances in diagnostic techniques for induction machines. IEEE Trans. Ind. Electron. 2008, 55, 4109–4126. [Google Scholar] [CrossRef]
- Choudhary, A.; Goyal, D.; Shimi, S.L.; Akula, A. Condition monitoring and fault diagnosis of induction motors: A review. Arch. Comput. Methods Eng. 2019, 26, 1221–1238. [Google Scholar] [CrossRef]
- Zolfaghari, S.; Noor, S.B.M.; Rezazadeh Mehrjou, M.; Marhaban, M.H.; Mariun, N. Broken rotor bar fault detection and classification using wavelet packet signature analysis based on fourier transform and multi-layer perceptron neural network. Appl. Sci. 2018, 8, 25. [Google Scholar] [CrossRef] [Green Version]
- Mehrjou, M.R.; Mariun, N.; Marhaban, M.H.; Misron, N. Rotor fault condition monitoring techniques for squirrel-cage induction machine—A review. Mech. Syst. Signal Process. 2011, 25, 2827–2848. [Google Scholar] [CrossRef]
- Caponetto, R.; Rizzo, F.; Russotti, L.; Xibilia, M.G. Deep learning algorithm for predictive maintenance of rotating machines through the analysis of the orbits shape of the rotor shaft. In Proceedings of the International Conference on Smart Innovation, Ergonomics and Applied Human Factors, SEAHF 2019, Madrid, Spain, 22–24 January 2019; Smart Innovation, Systems and Technologies. Springer: Cham, Switzerland, 2019; Volume 150, pp. 245–250. [Google Scholar]
- Santos, P.M.; Correa, M.B.R.; Jacobina, C.B.; Da Silva, E.R.C.; Lima, A.M.N.; Didiery, G.; Raziky, H.; Lubiny, T. A simplified induction machine model to study rotor broken bar effects and for detection. In Proceedings of the 37th IEEE Power Electronics Specialists Conference, Jeju, Korea, 18–22 June 2006; pp. 1–7. [Google Scholar]
- Ismail, A.; Saidi, L.; Sayadi, M.; Benbouzid, M. Remaining useful lifetime prediction of thermally aged power insulated gate bipolar transistor based on Gaussian process regression. Trans. Inst. Meas. Control 2020, 42, 2507–2518. [Google Scholar] [CrossRef]
- Mishra, M.; Saari, J.; Galar, D.; Leturiondo, U. Hybrid Models for Rotating Machinery Diagnosis and Prognosis: Estimation of Remaining Useful Life; Technical Report; Lulea University of Technology: Lulea, Sweden, 2014. [Google Scholar]
- Si, X.S.; Zhang, Z.X.; Hu, C.H. Data-Driven Remaining Useful Life Prognosis Techniques; Springer Series in Reliability Engineering; National Defense Industry Press and Springer: Beijing, China, 2017. [Google Scholar]
- Wang, Y.; Guo, R.; Liu, G. Remaining Useful Life Prognostics for the Rolling Bearing Based on a Hybrid Data-Driven Method. In Proceedings of the 3rd International Conference on Intelligent Robotic and Control Engineering (IRCE), Oxford, UK, 10–12 August 2020; pp. 123–127. [Google Scholar]
- Bittencourt, A.C.; Saarinen, K.; Sander-Tavallaey, S.; Gunnarsson, S.; Norrlöf, M. A data-driven approach to diagnostics of repetitive processes in the distribution domain–applications to gearbox diagnostics in industrial robots and rotating machines. Mechatronics 2014, 24, 1032–1041. [Google Scholar] [CrossRef] [Green Version]
- Zheng, Y. Predicting remaining useful life based on Hilbert–Huang entropy with degradation model. J. Electr. Comput. Eng. 2019, 99, 1–11. [Google Scholar] [CrossRef] [Green Version]
- Antonino-Daviu, J.A.; Riera-Guasp, M.; Folch, J.R.; Palomares, M.P.M. Validation of a new method for the diagnosis of rotor bar failures via wavelet transform in industrial induction machines. IEEE Trans. Appl. Ind. 2006, 42, 990–996. [Google Scholar] [CrossRef]
- Riera-Guasp, M.; Antonino-Daviu, J.A.; Pineda-Sanchez, M.; Puche-Panadero, R.; Pérez-Cruz, J. A general approach for the transient detection of slip-dependent fault components based on the discrete wavelet transform. IEEE Trans. Ind. Electron. 2008, 55, 4167–4180. [Google Scholar] [CrossRef]
- Siddiqui, K.M.; Giri, V.K. Broken rotor bar fault detection in induction motors using wavelet transform. In Proceedings of the International Conference on Computing, Electronics and Electrical Technologies (ICCEET), Nagercoil, India, 21–22 March 2012; pp. 1–6. [Google Scholar]
- Gritli, Y.; Di Tommaso, A.O.; Miceli, R.; Filippetti, F.; Rossi, C. Vibration signature analysis for rotor broken bar diagnosis in double cage induction motor drives. In Proceedings of the 4th International Conference on Power Engineering, Energy and Electrical Drives, Istanbul, Turkey, 13–17 May 2013; pp. 1814–1820. [Google Scholar]
- Hsu, J.S.; Woodson, H.H.; Weldon, W.F. Possible errors in measurement of air-gap torque pulsations of induction motors. IEEE Trans. Power Appar. Syst. 1992, 7, 202–208. [Google Scholar] [CrossRef]
- Ellison, A.J.; Yang, S.J. Effects of rotor eccentricity on acoustic noise from induction machines. Proc. Inst. Electr. Eng. 1971, 118, 174–184. [Google Scholar] [CrossRef]
- Cipollini, F.; Oneto, L.; Coraddu, A.; Savio, S.; Anguita, D. Unintrusive monitoring of induction motors bearings via deep learning on stator currents. Procedia Comput. 2018, 144, 42–51. [Google Scholar] [CrossRef]
- Ahmad, W.; Khan, S.A.; Kim, J.M. A hybrid prognostics technique for rolling element bearings using adaptive predictive models. IEEE Trans. Ind. Electron. 2017, 65, 1577–1584. [Google Scholar] [CrossRef]
- Li, P.; Jia, X.; Feng, J.; Davari, H.; Qiao, G.; Hwang, Y.; Lee, J. Prognosability study of ball screw degradation using systematic methodology. Mech. Syst. Signal Process. 2018, 109, 45–57. [Google Scholar] [CrossRef]
- Chen, S.; Živanović, R. Modelling and simulation of stator and rotor fault conditions in induction machines for testing fault diagnostic techniques. Int. Trans. Electr. Energy Syst. 2010, 20, 611–629. [Google Scholar] [CrossRef]
- Bejaoui, I.; Bruneo, D.; Xibilia, M.G. A Data-Driven Prognostics Technique and RUL Prediction of Rotating Machines Using an Exponential Degradation Model. In Proceedings of the 7th International Conference on Control, Decision and Information Technologies (CoDIT), Prague, Czech Republic, 29 June–2 July 2020; pp. 703–708. [Google Scholar]
- Gebraeel, N.Z.; Lawley, M.A.; Li, R.; Ryan, J.K. Residual-life distributions from component degradation signals: A Bayesian approach. IISE Trans. 2005, 37, 543–557. [Google Scholar] [CrossRef]
- Si, X.S.; Wang, W.; Chen, M.Y.; Hu, C.H.; Zhou, D.H. A degradation path-dependent approach for remaining useful life estimation with an exact and closed-form solution. Eur. J. Oper. Res. 2013, 226, 53–66. [Google Scholar] [CrossRef]
- Ali, J.B.; Saidi, L.; Harrath, S.; Bechhoefer, E.; Benbouzid, M. Online automatic diagnosis of wind turbine bearings progressive degradations under real experimental conditions based on unsupervised machine learning. Appl. Acoust. 2018, 132, 167–181. [Google Scholar]
- Saidi, L.; Ali, J.B.; Bechhoefer, E.; Benbouzid, M. Wind turbine high-speed shaft bearings health prognosis through a spectral Kurtosis-derived indices and SVR. Appl. Acoust. 2017, 120, 1–8. [Google Scholar] [CrossRef]
- Mosallam, A.; Medjaher, K.; Zerhouni, N. Unsupervised trend extraction for prognostics and condition assessment. IFAC Proc. Vol. 2012, 45, 97–102. [Google Scholar] [CrossRef] [Green Version]
- Xibilia, M.G.; Latino, M.; Marinković, Z.; Atanasković, A.; Donato, N. Soft sensors based on deep neural networks for applications in security and safety. IEEE Trans. Instrum. Meas. 2020, 69, 7869–7876. [Google Scholar] [CrossRef]
- Lei, Y.; Li, N.; Guo, L.; Li, N.; Yan, T.; Lin, J. Machinery health prognostics: A systematic review from data acquisition to RUL prediction. Mech. Syst. Signal Process. 2018, 104, 799–834. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Feature | Expression |
|---|---|
| Peak-To-Peak | |
| Root Mean Square (RMS) | ( |
| Mean | |
| Kurtosis | |
| Skewness | |
| Std | ( |
| Energy | |
| Crest factor | |
| Shape factor | |
| Margin factor | |
| Impulse factor |
| Metrics | HIs | Averages | |
|---|---|---|---|
| HI-Torque | HI-Current | ||
| RMSE | 2.2 | 1.638 | 1.919 |
| NRMSE | 0.2371 | 0.2885 | 0.2628 |
| 0.8377 | 0.4782 | 0.6579 | |
| MAPE | 15% | 1.5263% | 8.26315% |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bejaoui, I.; Bruneo, D.; Xibilia, M.G. Remaining Useful Life Prediction of Broken Rotor Bar Based on Data-Driven and Degradation Model. Appl. Sci. 2021, 11, 7175. https://doi.org/10.3390/app11167175
Bejaoui I, Bruneo D, Xibilia MG. Remaining Useful Life Prediction of Broken Rotor Bar Based on Data-Driven and Degradation Model. Applied Sciences. 2021; 11(16):7175. https://doi.org/10.3390/app11167175
Chicago/Turabian StyleBejaoui, Islem, Dario Bruneo, and Maria Gabriella Xibilia. 2021. "Remaining Useful Life Prediction of Broken Rotor Bar Based on Data-Driven and Degradation Model" Applied Sciences 11, no. 16: 7175. https://doi.org/10.3390/app11167175
APA StyleBejaoui, I., Bruneo, D., & Xibilia, M. G. (2021). Remaining Useful Life Prediction of Broken Rotor Bar Based on Data-Driven and Degradation Model. Applied Sciences, 11(16), 7175. https://doi.org/10.3390/app11167175