
Study on Overturn Proof Monitoring System of Mobile Crane

Abstract
:1. Introduction
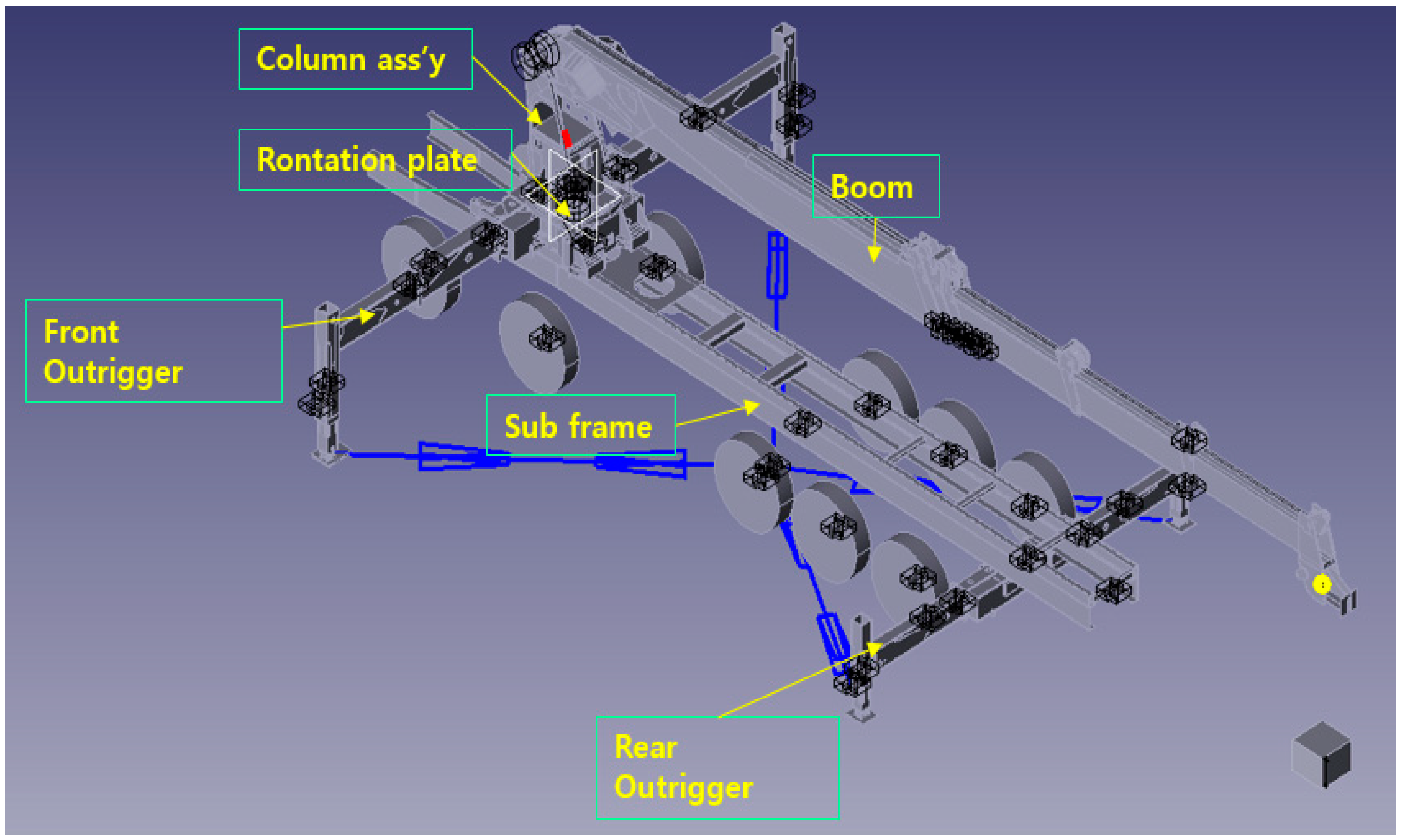
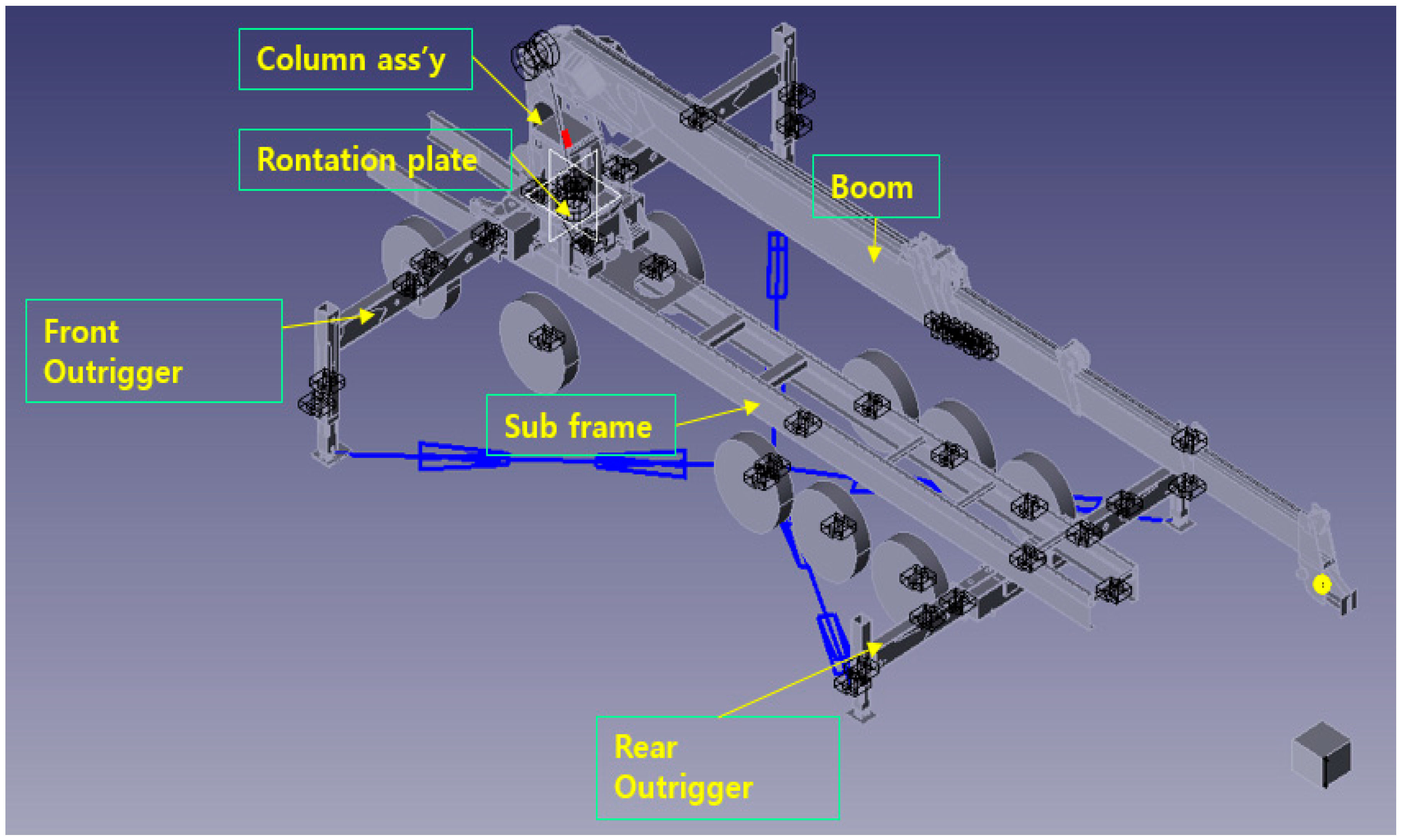
2. A Simulator of Mobile Crane
2.1. Zero Moment Point Theory
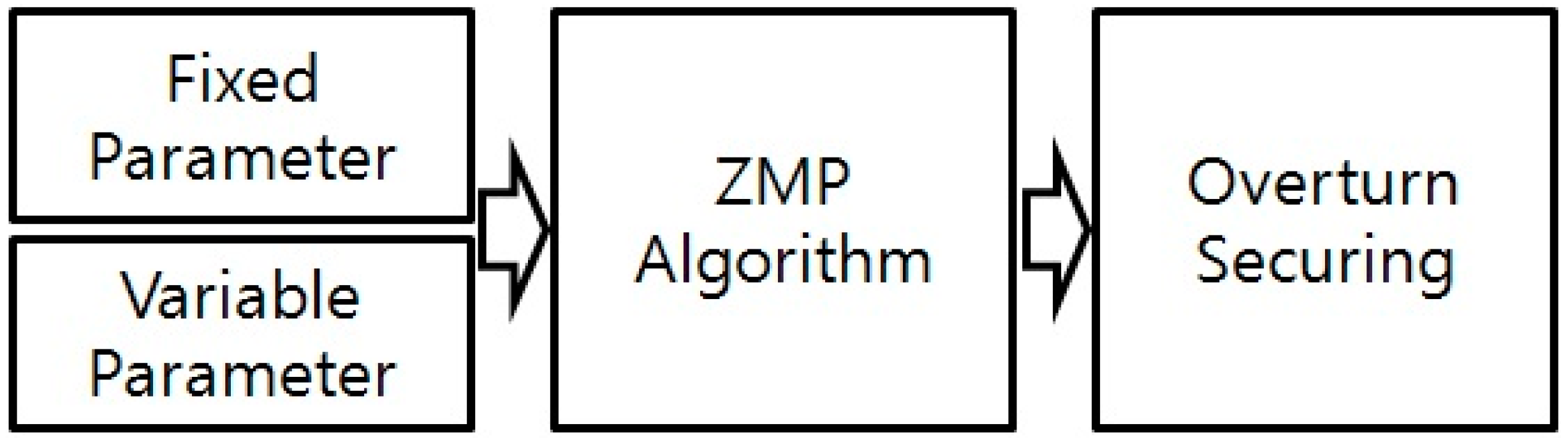
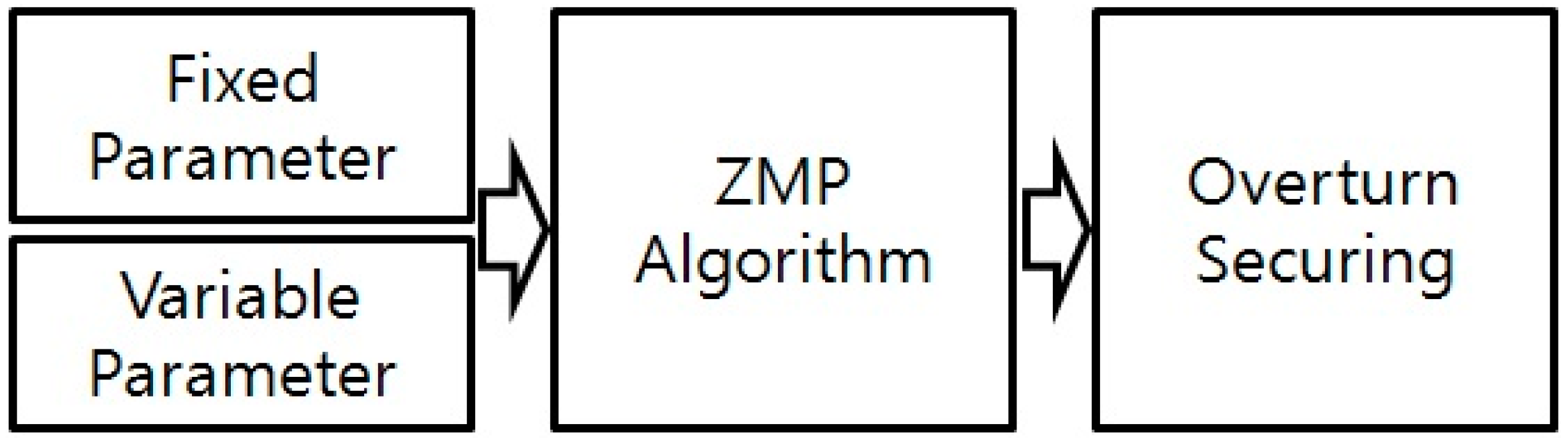
2.2. Overturn Securing Algorithm
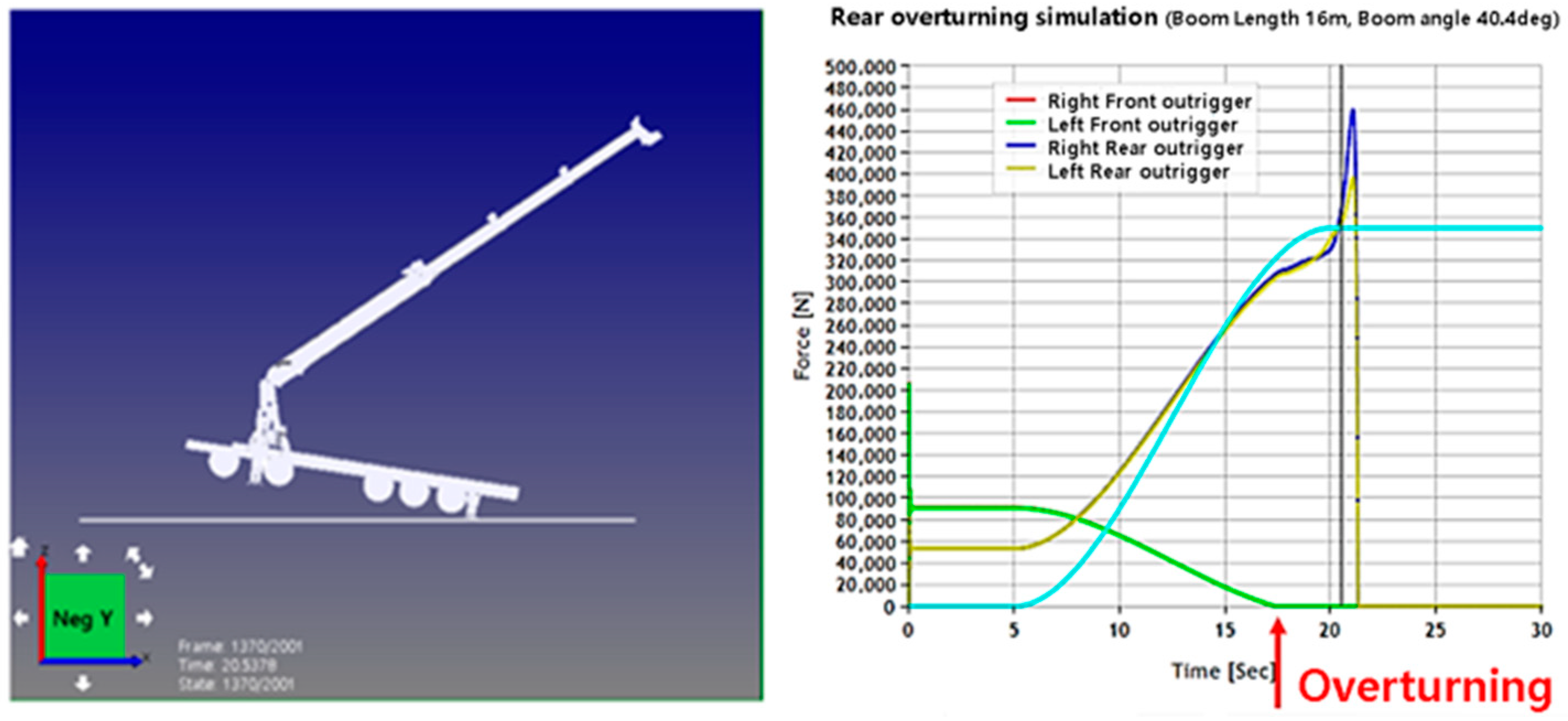
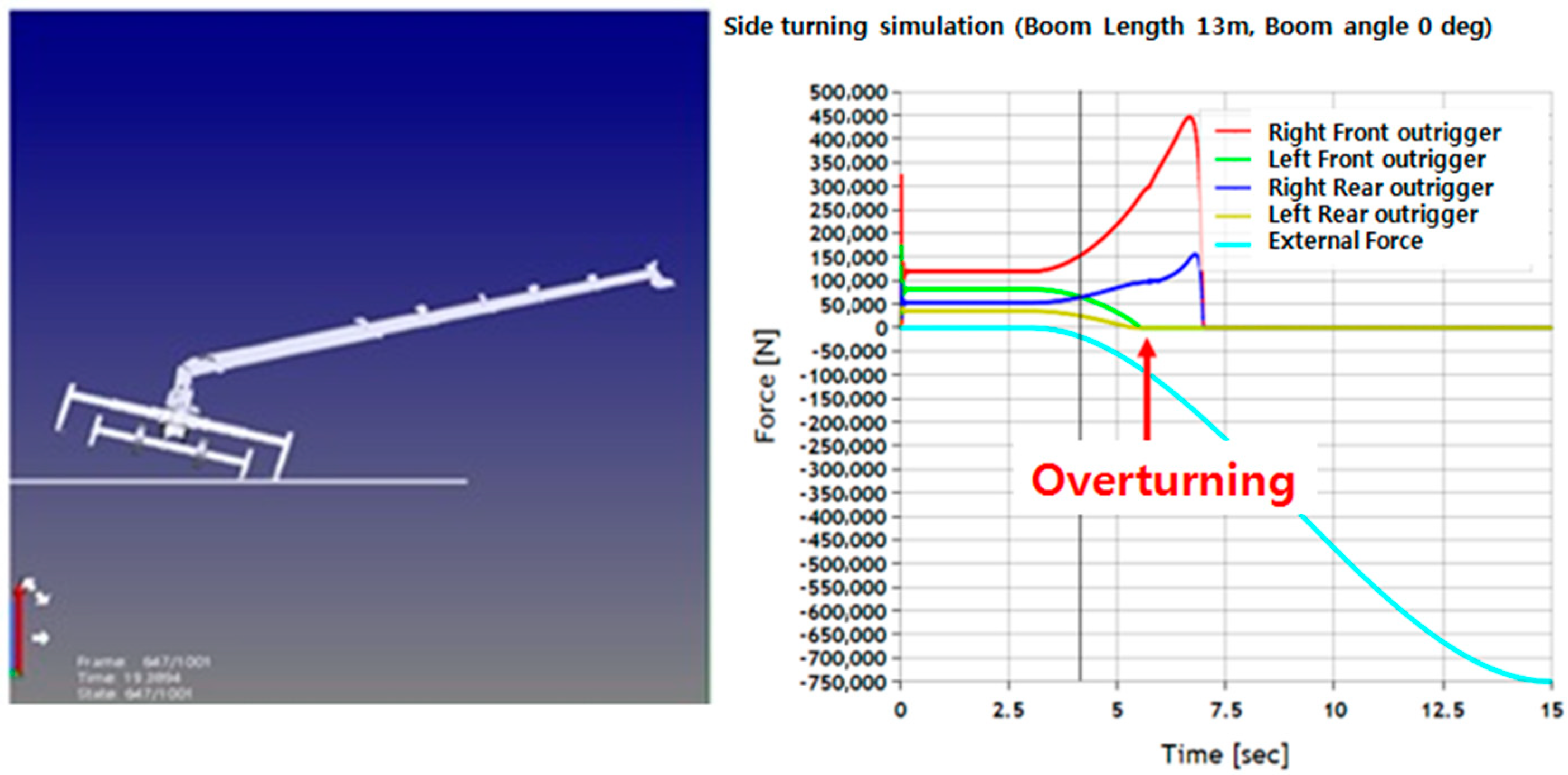
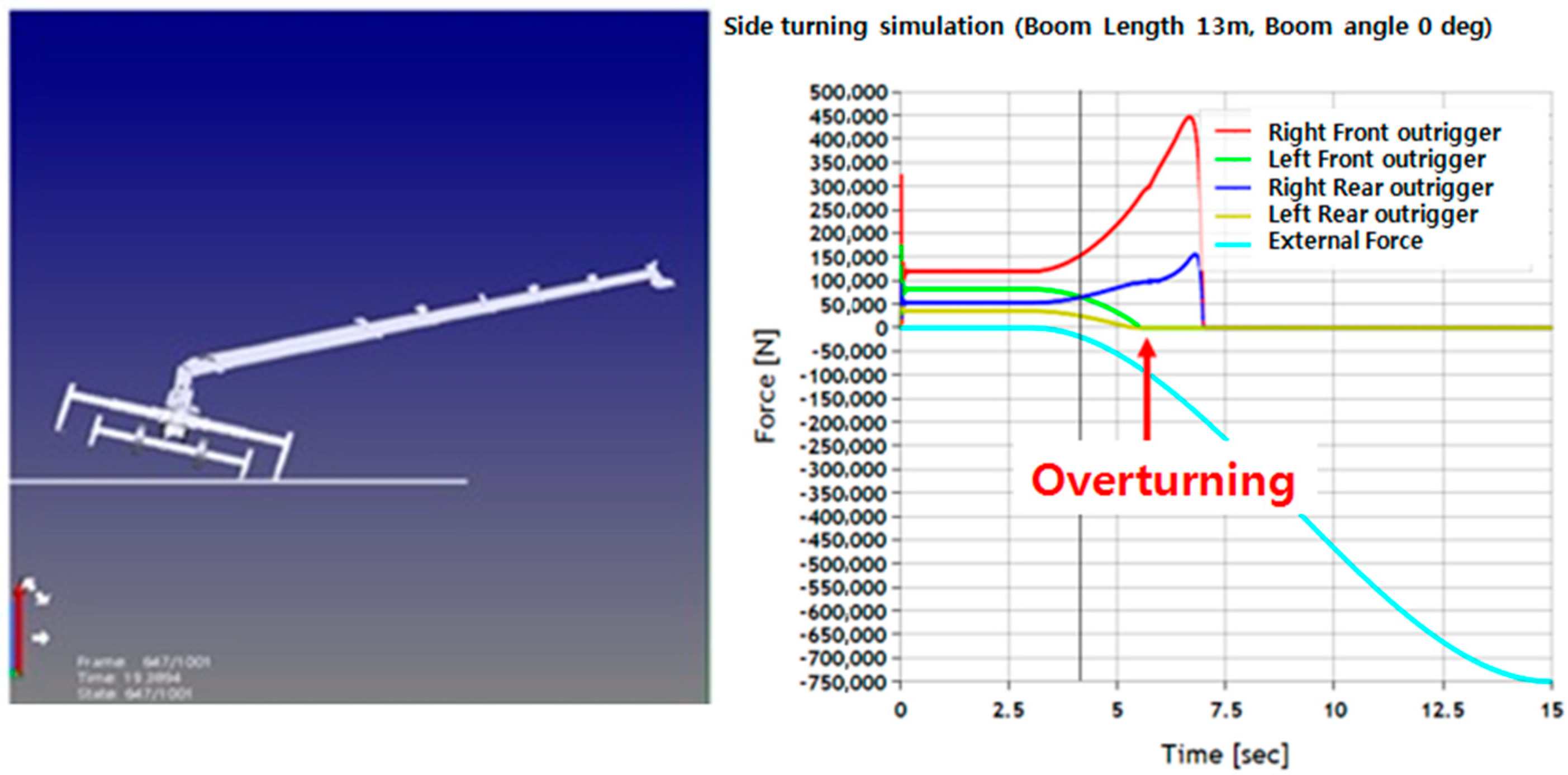
2.3. Dynamic Characteristic Analysis
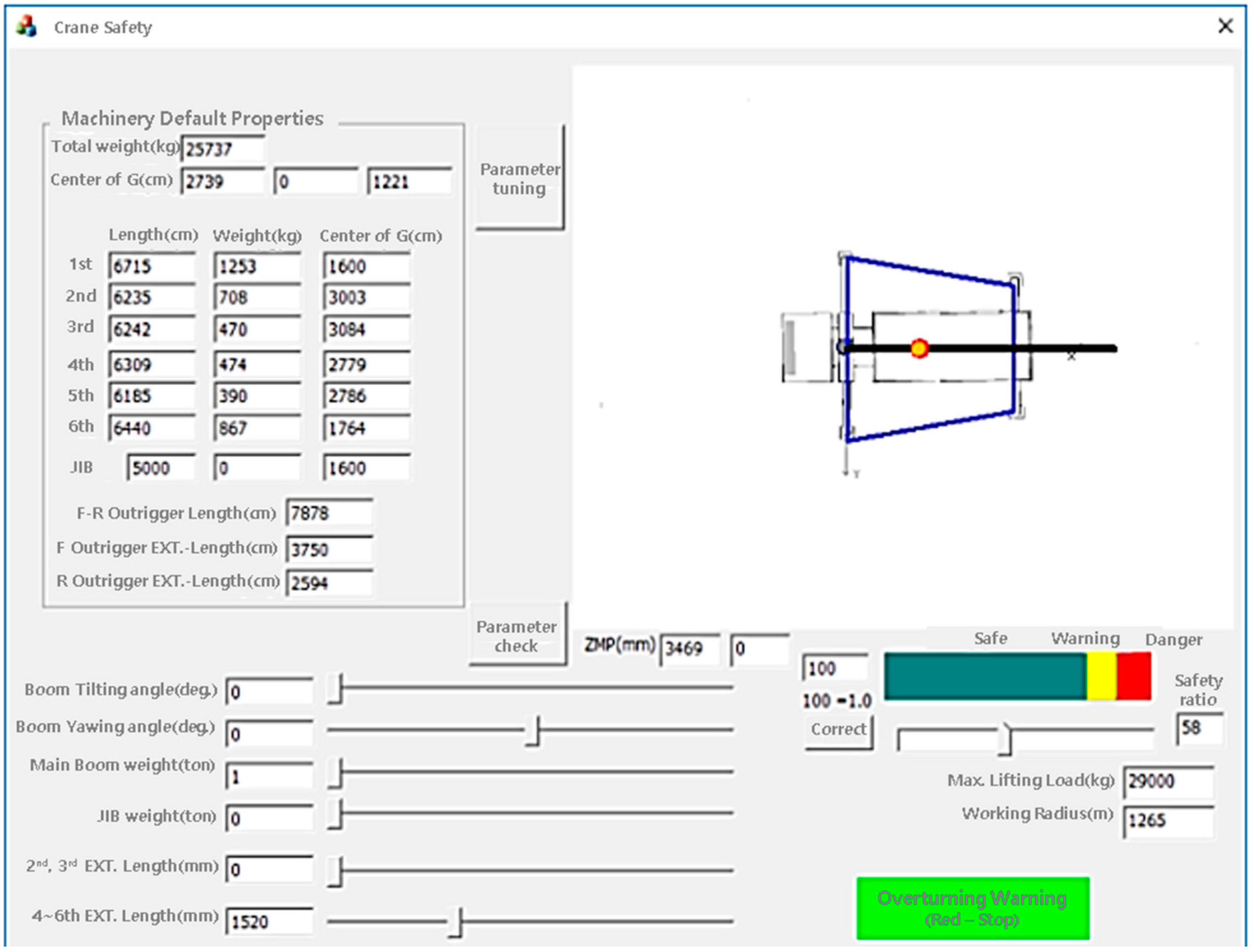
3. Performance Evaluation and Field Test
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Conflicts of Interest
References
- Irizarry, J.; Karan, E. Optimizing Location of Tower Cranes on Construction Sites through GIS and BIM Integration. J. Inf. Technol. Constr. (ITcon) 2012, 17, 351–366. [Google Scholar]
- Shapira, A.; Lyachin, B. Identification and Analysis of Factors Affecting Safety on Construction Sites with Tower Cranes. J. Constr. Eng. Manag. 2009, 135, 24–33. [Google Scholar] [CrossRef] [Green Version]
- Milazzo, M.F.; Ancione, G.; Spasojević-Brkić, V.; Valis, D. Investigation of crane operation safety by analysing main accident causes. Risk Reliab. Saf. Innov. Theory Pract. 2016, 74–80. [Google Scholar]
- Yu, Y.H. Forensic investigation on crane accidents. Int. J. Forensic Eng. 2017, 3, 319. [Google Scholar] [CrossRef]
- Tran, Q.H.; Huh, J.; Doan, N.S.; Mac, V.H.; Ahn, J.-H. Fragility Assessment of a Container Crane under Seismic Excitation Considering Uplift and Derailment Behavior. Appl. Sci. 2019, 9, 4660. [Google Scholar] [CrossRef] [Green Version]
- Ko, S.-H.; Lee, K.-H.; Lee, C.-H. Safety Verification of Gantry Cranes using Hydraulic Cylinders. J. Drive Control. 2019, 16, 8–14. [Google Scholar]
- Ma, X.; Bao, H. An Anti-Swing Closed-Loop Control Strategy for Overhead Cranes. Appl. Sci. 2018, 8, 1463. [Google Scholar] [CrossRef] [Green Version]
- Xiao, R.; Wang, Z.; Guo, N.; Wu, Y.; Shen, J.; Chen, Z. Multi-Objective Motion Control Optimization for the Bridge Crane System. Appl. Sci. 2018, 8, 473. [Google Scholar] [CrossRef] [Green Version]
- Gharaie, E.; Lingard, H.; Cooke, T. Causes of fatal accidents involving cranes in the Australian construction industry. Constr. Econ. Build. 2015, 15, 1–12. [Google Scholar] [CrossRef] [Green Version]
- Khodadadian, A.; Noii, N.; Parvizi, M.; Abbaszadeh, M.; Wick, T.; Heitzinger, C. Bayesian estimation method for variational phase-field fracture problems. Comput. Mech. 2020, 66, 827–849. [Google Scholar] [CrossRef] [PubMed]
- Brecher, C.; Japer, D.; Fey, M. Analysis of New, Energy-Efficient Hydraulic Unit for Machine Tools. Int. Précis. Eng. Manuf.-Green Technol. 2017, 4, 5–11. [Google Scholar] [CrossRef]
- Um, H.; Choi, J.; Kim, S.; Yang, S.; Lee, J. A Study on Reversal Stability of Hydraulic Excavator for Crane Work. Trans. Korean Soc. Mach. Tool Eng. 2004, 13, 64–72. [Google Scholar]
- Ghasempoor, A.; Sepehri, N. A Measure of Stability for Mobile Manipulators with Application to Heavy-Duty Hydraulic Machines. J. Dyn. Sys. Meas. Control. 1998, 120, 360–370. [Google Scholar] [CrossRef] [Green Version]
- Yoon, B.-J.; Lee, K.-S.; Lee, J.-H. A Novel Predictable Rock Breaker Using Intelligent Hydraulic Control with ICT Convergences. Appl. Sci. 2019, 9, 3333. [Google Scholar] [CrossRef] [Green Version]
- Nadar, M.A.; Awakian, C.A.; Khoury, H.K. An intelligent system for monitoring tower crane on construction site. In Proceedings of the 30th ISARC, Montréal, QC, Canada, 11–15 August 2013; pp. 1239–1246. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Nomenclature | Description |
|---|---|
| mass of particle | |
| gravitational acceleration | |
| position vector of particle | |
| position vector | |
| position vector where external force | |
| resultant torque acted on point | |
| external force | |
| external moment |
| Operation Radius (m) | Overturn Load (kN) | Initial Reaction Force Front Outrigger (kN) | Initial Reaction Force Rear Outrigger (kN) |
|---|---|---|---|
| 13 | 227 | 79.8 | 79.5 |
| 16 | 171 | 72.5 | 86.8 |
| 19 | 122.5 | 65.1 | 94.1 |
| Reaction Forces (kgf) | Right Front | Left Front | Right Rear | Right Rear |
|---|---|---|---|---|
| simulation | 7916 | 7961 | 4908 | 4913 |
| actual loads | 8120 | 8290 | 5320 | 5320 |
| Reaction Forces (kgf) | 7.7 (m) | 13 (m) | Lift 2 Tons | |
|---|---|---|---|---|
| simulation | 1 | 8090 | 7160 | 6890 |
| 2 | 8180 | 7320 | 6910 | |
| 3 | 5280 | 6180 | 7510 | |
| 4 | 5320 | 6230 | 7580 | |
| actual loads | 1 | 8240 | 1630 | 7059 |
| 2 | 8256 | 1645 | 7065 | |
| 3 | 5188 | 8489 | 7405 | |
| 4 | 5188 | 5745 | 7390 | |
| error (%) | 1 | 1.8 | 4.5 | 2.4 |
| 2 | 0.9 | 3.4 | 2.2 | |
| 3 | 1.7 | 4.8 | 1.3 | |
| 4 | 2.4 | 4.7 | 2.5 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yoon, B.-J.; Lee, K.-S.; Lee, J.-H. Study on Overturn Proof Monitoring System of Mobile Crane. Appl. Sci. 2021, 11, 6819. https://doi.org/10.3390/app11156819
Yoon B-J, Lee K-S, Lee J-H. Study on Overturn Proof Monitoring System of Mobile Crane. Applied Sciences. 2021; 11(15):6819. https://doi.org/10.3390/app11156819
Chicago/Turabian StyleYoon, Bok-Joong, Kil-Soo Lee, and Jae-Hak Lee. 2021. "Study on Overturn Proof Monitoring System of Mobile Crane" Applied Sciences 11, no. 15: 6819. https://doi.org/10.3390/app11156819
APA StyleYoon, B.-J., Lee, K.-S., & Lee, J.-H. (2021). Study on Overturn Proof Monitoring System of Mobile Crane. Applied Sciences, 11(15), 6819. https://doi.org/10.3390/app11156819