
Homogenized Balance Equations for Nonlinear Poroelastic Composites


{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
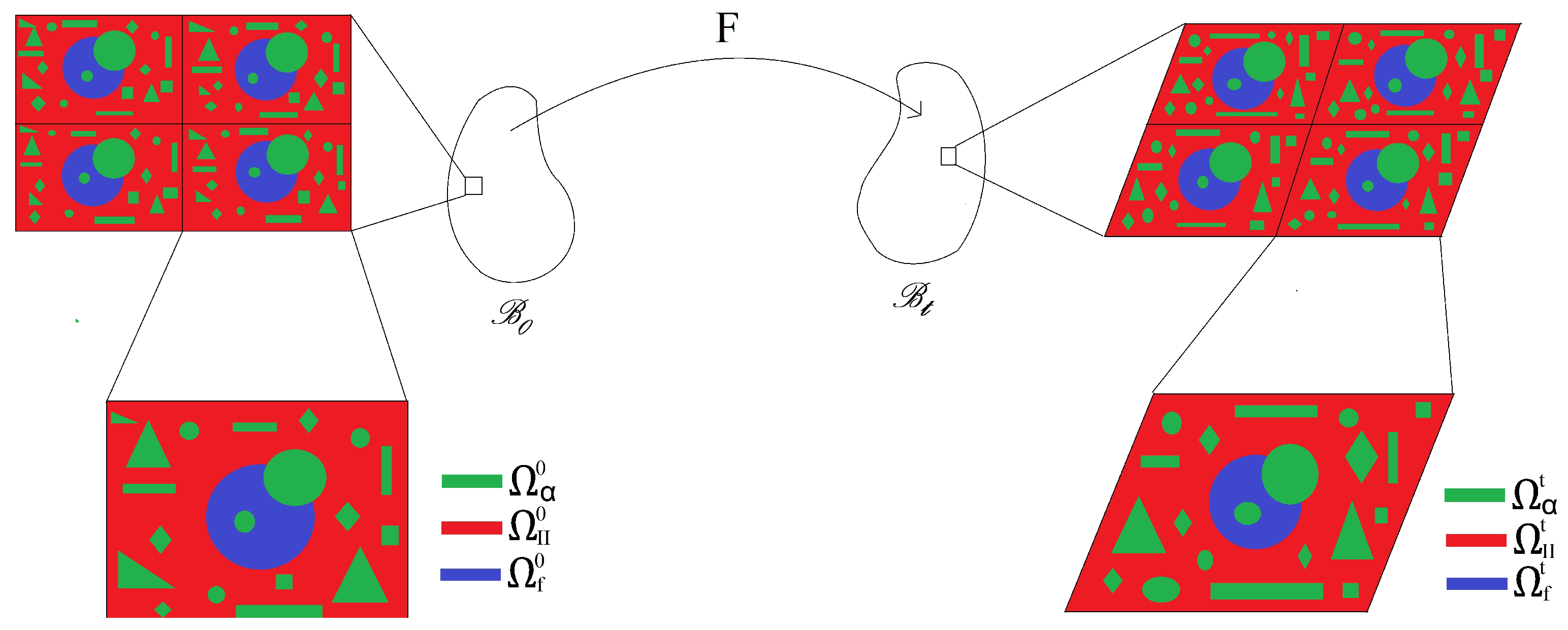
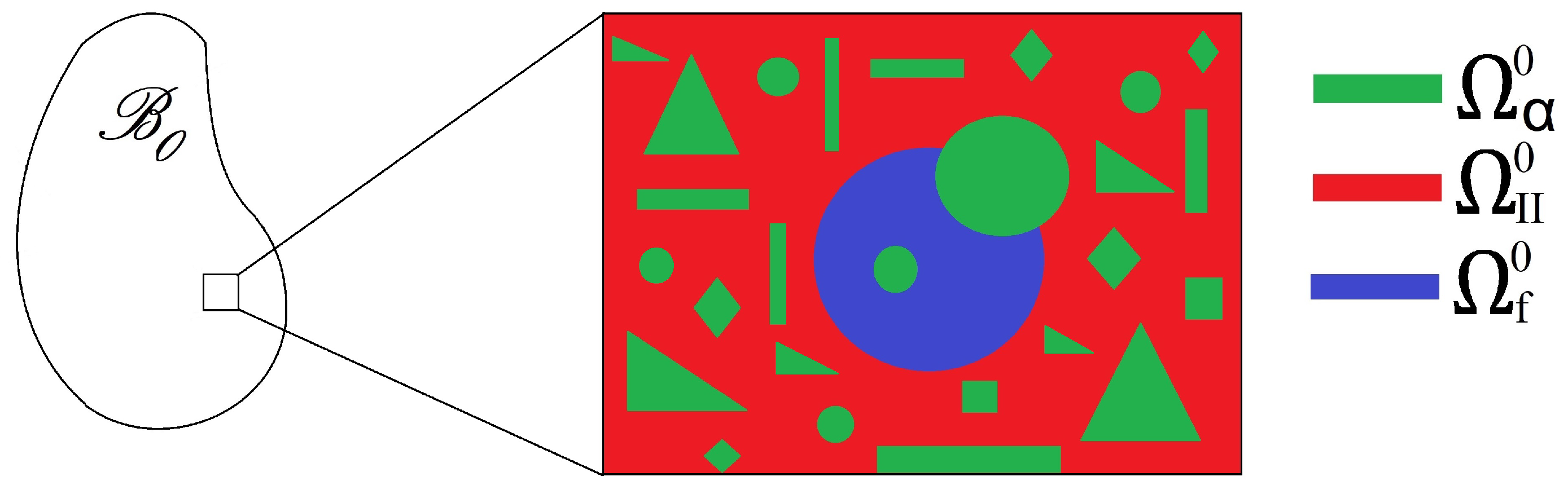
2. Formulation of the Fluid–Structure Interaction Problem
2.1. Fluid–Structure Interaction in Lagrangian Coordinates
3. The Asymptotic Homogenization Method
3.1. Nondimensionalisation
3.2. The Two-Scale Asymptotic Homogenization Method
3.3. The Macroscale Results
3.4. The Macroscale Fluid Flow
3.5. The Macroscale Poroelastic Relationships
4. The Macroscale Model and Particular Cases
4.1. Constitutive Law
4.2. Comparison with Linear Poroelastic Composites
4.3. Comparison with Nonlinear Poroelasticity
4.4. Comparison with Nonlinear Elastic Composites
5. Concluding Remarks
Author Contributions
Funding
Conflicts of Interest
References
- Biot, M.A. Theory of elasticity and consolidation for a porous anisotropic solid. J. Appl. Phys. 1955, 26, 182–185. [Google Scholar] [CrossRef]
- Biot, M.A. General solutions of the equations of elasticity and consolidation for a porous material. J. Appl. Mech 1956, 23, 91–96. [Google Scholar] [CrossRef]
- Biot, M.A. Theory of propagation of elastic waves in a fluid-saturated porous solid. II. Higher frequency range. J. Acoust. Soc. Am. 1956, 28, 179–191. [Google Scholar] [CrossRef]
- Biot, M.A. Mechanics of deformation and acoustic propagation in porous media. J. Appl. Phys. 1962, 33, 1482–1498. [Google Scholar] [CrossRef]
- Berryman, J.G.; Thigpen, L. Nonlinear and semilinear dynamic poroelasticity with microstructure. J. Mech. Phys. Solids 1985, 33, 97–116. [Google Scholar] [CrossRef]
- Bemer, E.; Boutéca, M.; Vincké, O.; Hoteit, N.; Ozanam, O. Poromechanics: From Linear to Nonlinear Poroelasticity and Poroviscoelasticity. Oil Gas Sci. Technol. Rev. IFP 2001, 56, 531–544. [Google Scholar] [CrossRef] [Green Version]
- Norris, A.N.; Grinfeld, M.A. Nonlinear poroelasticity for a layered medium. J. Acoust. Soc. Am. 1995, 98, 1138. [Google Scholar] [CrossRef] [Green Version]
- Zakerzadeh, R.; Zunino, P. A computational framework for fluid–porous structure interaction with large structural deformation. Meccanica 2019, 54, 101–121. [Google Scholar] [CrossRef]
- Berger, L.; Kay, D.; Burrowes, K.; Grau, V.; Tavener, S.; Bordas, R. A Poroelastic Model Coupled to a Fluid Network with Applications in Lung Modelling. 2015. Available online: http://xxx.lanl.gov/abs/1411.1491 (accessed on 4 April 2019).
- Chapelle, D.; Gerbeau, J.F.; Sainte-Marie, J.; Vignon-Clementel, I.E. A poroelastic model valid in large strains with applications to perfusion in cardiac modeling. Comput. Mech. 2010, 46, 91–101. [Google Scholar] [CrossRef] [Green Version]
- May-Newman, K.; McCulloch, A.D. Homogenization modeling for the mechanics of perfused myocardium. Prog. Biophys. Mol. Biol. 1998, 69, 463–481. [Google Scholar] [CrossRef]
- Zakerzadeh, R.; Zunino, P. Fluid-structure interaction in arteries with a poroelastic wall model. In Proceedings of the 2014 21th Iranian Conference on Biomedical Engineering (ICBME), Tehran, Iran, 26–28 November 2014; pp. 35–39. [Google Scholar]
- Auton, L.C.; MacMinn, C.W. From arteries to boreholes: Steady-state response of a poroelastic cylinder to fluid injection. Proc. R. Soc. A Math. Phys. Eng. Sci. 2017, 473, 20160753. [Google Scholar] [CrossRef] [Green Version]
- Fraldi, M.; Carotenuto, A.R. Cells competition in tumour growth poroelasticity. J. Mech. Phys. Solids 2018, 112, 345–367. [Google Scholar] [CrossRef]
- Babaniyi, O.; Jadamba, B.; Khan, A.A.; Richards, M.; Sama, M.; Tammer, C. Three optimization formulations for an inverse problem in saddle point problems with applications to elasticity imaging of locating tumour in incompressible medium. J. Nonlinear Var. Anal. 2020, 4, 301–318. [Google Scholar]
- Guesmia, A.; Kafini, M.; Tatar, N. General stability results for the translational problem of memory-type in porous thermoelasticity of type III. J. Nonlinear Funct. Anal. 2020. Available online: http://jnfa.mathres.org/issues/JNFA202049.pdf (accessed on 4 April 2019).
- Dormieux, L.; Kondo, D.; Ulm, F.J. Microporomechanics; John Wiley and Sons, Ltd.: Hoboken, NJ, USA, 2006. [Google Scholar]
- Hori, M.; Nemat-Nasser, S. On two micromechanics theories for determining micro-macro relations in heterogeneous solid. Mech. Mater. 1999, 31, 667–682. [Google Scholar] [CrossRef]
- Davit, Y.; Bell, C.G.; Byrne, H.M.; Chapman, L.A.; Kimpton, L.S.; Lang, G.E.; Leonard, K.H.; Oliver, J.M.; Pearson, N.C.; Shipley, R.J. Homogenization via formal multiscale asymptoticsand volume averaging:how do the two techniques compare? Adv. Water Resour. 2013, 62, 178–206. [Google Scholar] [CrossRef]
- Auriault, J.L.; Boutin, C.; Geindreau, C. Homogenization of Coupled Phenomena in Heterogenous Media; John Wiley & Sons: Hoboken, NJ, USA, 2010; Volume 149. [Google Scholar]
- Holmes, M.H. Introduction to Perturbation Methods; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012; Volume 20. [Google Scholar]
- Mei, C.C.; Vernescu, B. Homogenization Methods for Multiscale Mechanics; World Scientific: Singapore, 2010. [Google Scholar]
- Penta, R.; Gerisch, A. An Introduction to Asymptotic Homogenization. In Multiscale Models in Mechano and Tumor Biology; Springer: Berlin/Heidelberg, Germany, 2017; pp. 1–26. [Google Scholar]
- Lévy, T. Propagation of waves in a fluid-saturated porous elastic solid. Int. J. Eng. Sci. 1979, 17, 1005–1014. [Google Scholar] [CrossRef]
- Burridge, R.; Keller, J.B. Poroelasticity equations derived from microstructure. J. Acoust. Soc. Am. 1981, 70, 1140–1146. [Google Scholar] [CrossRef]
- Penta, R.; Merodio, J. Homogenized modeling for vascularized poroelastic materials. Meccanica 2017, 52, 3321–3343. [Google Scholar] [CrossRef] [Green Version]
- Miller, L.; Penta, R. Effective balance equations for poroelastic composites. Contin. Mech. Thermodyn. 2020, 32, 1533–1557. [Google Scholar] [CrossRef] [Green Version]
- Parnell, W.J.; Vu, M.B.; Grimal, Q.; Naili, S. Analytical methods to determine the effective mesoscopic and macroscopic elastic properties of cortical bone. Biomech. Model. Mechanobiol. 2012, 11, 883–901. [Google Scholar] [CrossRef]
- Castañeda, P. The effective mechanical properties of nonlinear isotropic composites. J. Mech. Phys. Solids 1991, 39, 45–71. [Google Scholar] [CrossRef]
- Castañeda, P.; Zaidman, M. Constitutive models for porous materials with evolving microstructure. J. Mech. Phys. Solids 1994, 42, 1459–1497. [Google Scholar] [CrossRef]
- Brown, D.L.; Popov, P.; Efendiev, Y. Effective equations for fluid–structure interaction with applications to poroelasticity. Appl. Anal. Int. J. 2014, 93, 771–790. [Google Scholar] [CrossRef]
- Collis, J.; Brown, D.; Hubbard, M.; O’Dea, R. Effective equations governing an active poroelastic medium. Proc. R. Soc. A Math. Phys. Eng. Sci. 2017, 473, 20160755. [Google Scholar] [CrossRef]
- Ramírez-Torres, A.; Stefano, S.D.; Grillo, A.; Rodríguez-Ramos, R.; Merodio, J.; Penta, R. An asymptotic homogenization approach to the microstructural evolution of heterogeneous media. Int. J. Non-Linear Mech. 2018, 106, 245–257. [Google Scholar] [CrossRef] [Green Version]
- Jayaraman, G. Water transport in the arterial wall—A theoretical study. J. Biomech. 1983, 16, 833–840. [Google Scholar] [CrossRef]
- Klanchar, M.; Tarbell, J.M. Modeling water flow through arterial tissue. Bull. Math. Biol. 1987, 49, 651–669. [Google Scholar] [CrossRef]
- Holzapfel, G.; Ogden, R.W. Constitutive modelling of arteries. Proc. R. Soc. A Math. Phys. Eng. Sci. 2010, 466, 1551–1597. [Google Scholar]
- Bukac, M.; Yotov, I.; Zakerzadeh, R.; Zunino, P. Effects of Poroelasticity on Fluid-Structure Interaction in Arteries: A Computational Sensitivity Study. In Modeling the Heart and the Circulatory System; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; pp. 197–220. [Google Scholar]
- Cookson, A.; Lee, J.; Michler, C.; Chabiniok, R.; Hyde, E.; Nordsletten, D.; Sinclair, M.; Siebes, M.; Smith, N. A novel porous mechanical framework for modelling the interaction between coronary perfusion and myocardial mechanics. J. Biomech. 2012, 45, 850–855. [Google Scholar] [CrossRef] [Green Version]
- Penta, R.; Ambrosi, D.; Shipley, R. Effective governing equations for poroelastic growing media. Q. J. Mech. Appl. Math. 2014, 67, 69–91. [Google Scholar] [CrossRef] [Green Version]
- Dehghani, H.; Penta, R.; Merodio, J. The role of porosity and solid matrix compressibility on the mechanical behavior of poroelastic tissues. Mater. Res. Express 2018, 6, 035404. [Google Scholar] [CrossRef] [Green Version]
- Dehghani, H.; Noll, I.; Penta, R.; Menzel, A.; Merodio, J. The role of microscale solid matrix compressibility on the mechanical behaviour of poroelastic materials. Eur. J. Mech. A/Solids 2020, 83, 103996. [Google Scholar] [CrossRef]
- Dalwadi, M.P.; Griffiths, I.M.; Bruna, M. Understanding how porosity gradients can make a better filter using homogenization theory. Proc. R. Soc. A Math. Phys. Eng. Sci. 2015, 471, 20150464. [Google Scholar] [CrossRef] [Green Version]
- Penta, R.; Ambrosi, D.; Quarteroni, A. Multiscale homogenization for fluid and drug transport in vascularized malignant tissues. Math. Model. Methods Appl. Sci. 2015, 25, 79–108. [Google Scholar] [CrossRef]
- Penta, R.; Gerisch, A. Investigation of the potential of asymptotic homogenization for elastic composites via a three-dimensional computational study. Comput. Vis. Sci. 2015, 17, 185–201. [Google Scholar] [CrossRef]
- Dehghani, H.; Zilian, A. ANN-aided incremental multiscale-remodelling-based finite strain poroelasticity. Comput. Mech. 2021, 68, 131–154. [Google Scholar] [CrossRef]
- Penta, R.; Gerisch, A. The asymptotic homogenization elasticity tensor properties for composites with material discontinuities. Contin. Mech. Thermodyn. 2017, 29, 187–206. [Google Scholar] [CrossRef] [Green Version]
- Weiner, S.; Wagner, H.D. The material bone: Structure-mechanical function relations. Annu. Rev. Mater. Sci. 1998, 28, 271–298. [Google Scholar] [CrossRef]
- Siklosi, M.; Jensen, O.E.; Tew, R.H.; Logg, A. Multiscale modeling of the acoustic properties of lung parenchyma. ESAIM 2008, 23, 78–97. [Google Scholar] [CrossRef]
- Ramírez-Torres, A.; Penta, R.; Rodríguez-Ramos, R.; Merodio, J.; Sabina, F.; Bravo-Castillero, J.; Guinovart-Díaz, R.; Preziosi, L.; Grillo, A. Three scales asymptotic homogenization and its application to layered hierarchical hard tissues. Int. J. Solids Struct. 2018, 130, 190–198. [Google Scholar] [CrossRef]
- Ramírez-Torres, A.; Penta, R.; Rodríguez-Ramos, R.; Grillo, A.; Preziosi, L.; Merodio, J.; Guinovart-Díaz, R.; Bravo-Castillero, J. Homogenized out-of-plane shear response of three-scale fibre-reinforced composites. Comput. Vis. Sci. 2019, 20, 85–93. [Google Scholar] [CrossRef] [Green Version]

Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Miller, L.; Penta, R. Homogenized Balance Equations for Nonlinear Poroelastic Composites. Appl. Sci. 2021, 11, 6611. https://doi.org/10.3390/app11146611
Miller L, Penta R. Homogenized Balance Equations for Nonlinear Poroelastic Composites. Applied Sciences. 2021; 11(14):6611. https://doi.org/10.3390/app11146611
Chicago/Turabian StyleMiller, Laura, and Raimondo Penta. 2021. "Homogenized Balance Equations for Nonlinear Poroelastic Composites" Applied Sciences 11, no. 14: 6611. https://doi.org/10.3390/app11146611
APA StyleMiller, L., & Penta, R. (2021). Homogenized Balance Equations for Nonlinear Poroelastic Composites. Applied Sciences, 11(14), 6611. https://doi.org/10.3390/app11146611