
Multi-Sensor Fusion Positioning Method Based on Batch Inverse Covariance Intersection and IMM

Abstract
1. Introduction
2. Local Filter
3. Fusion Algorithms Considering Accuracy and Robustness
3.1. SICI Fusion Algorithm
3.2. BICI Fusion Algorithm
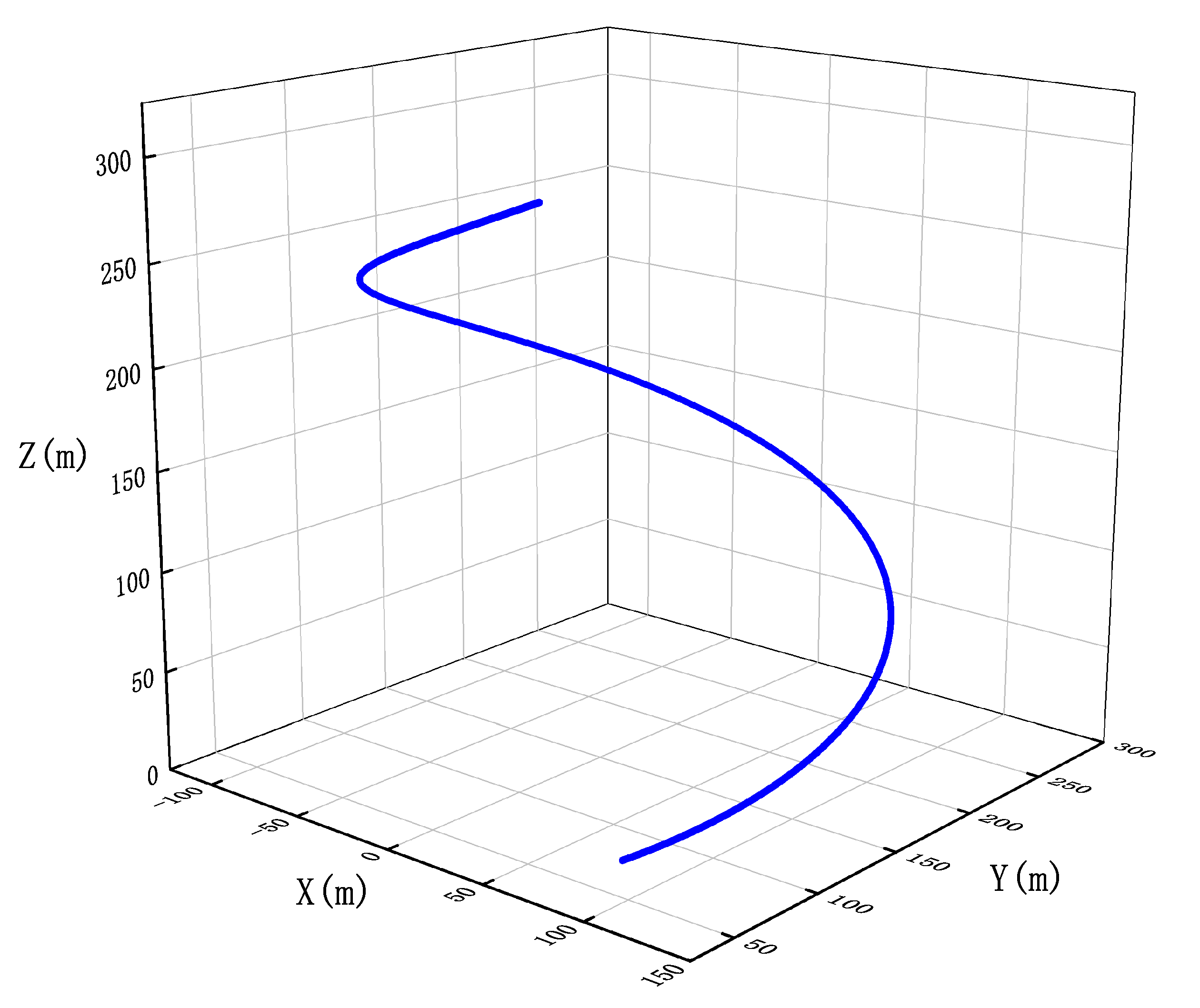
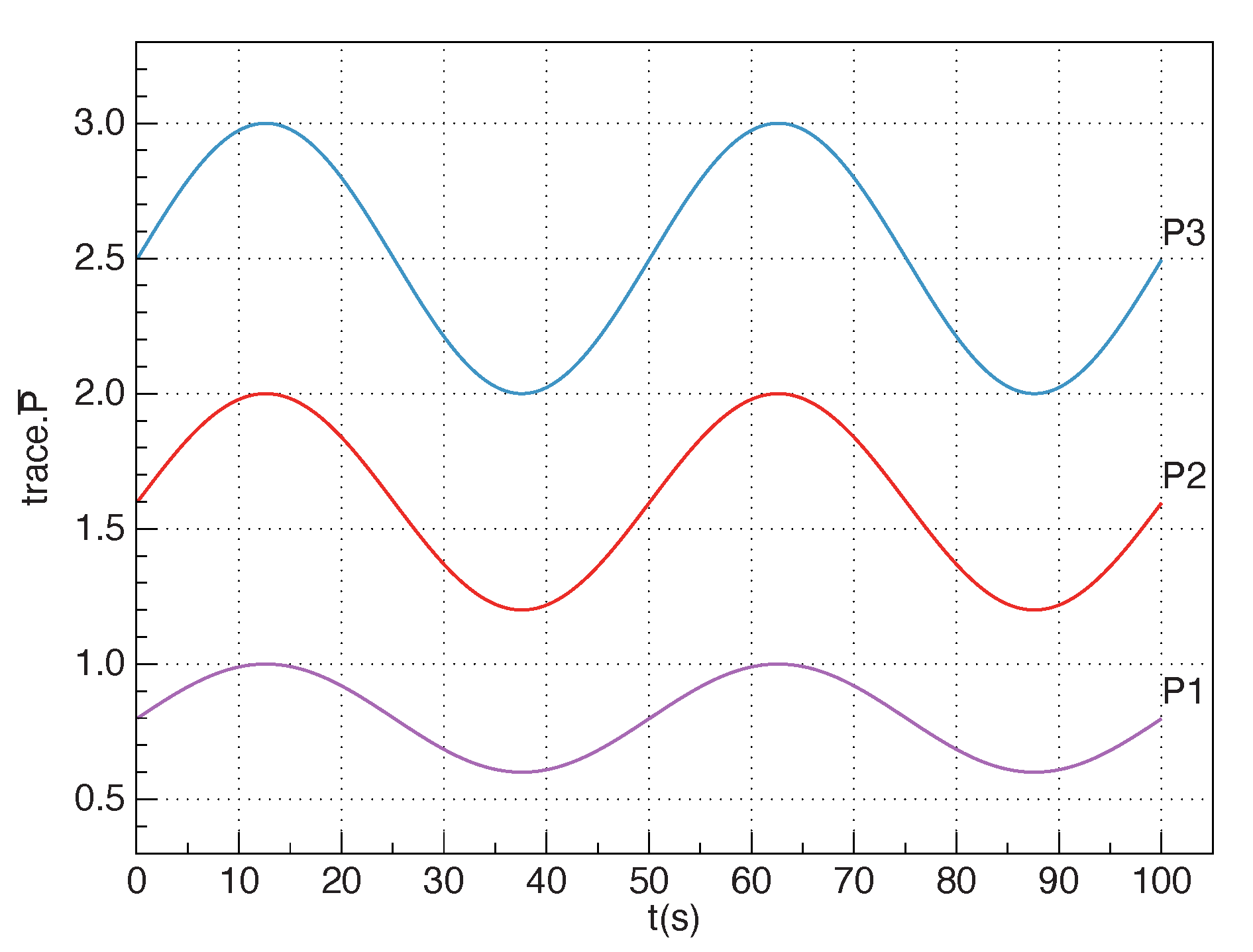
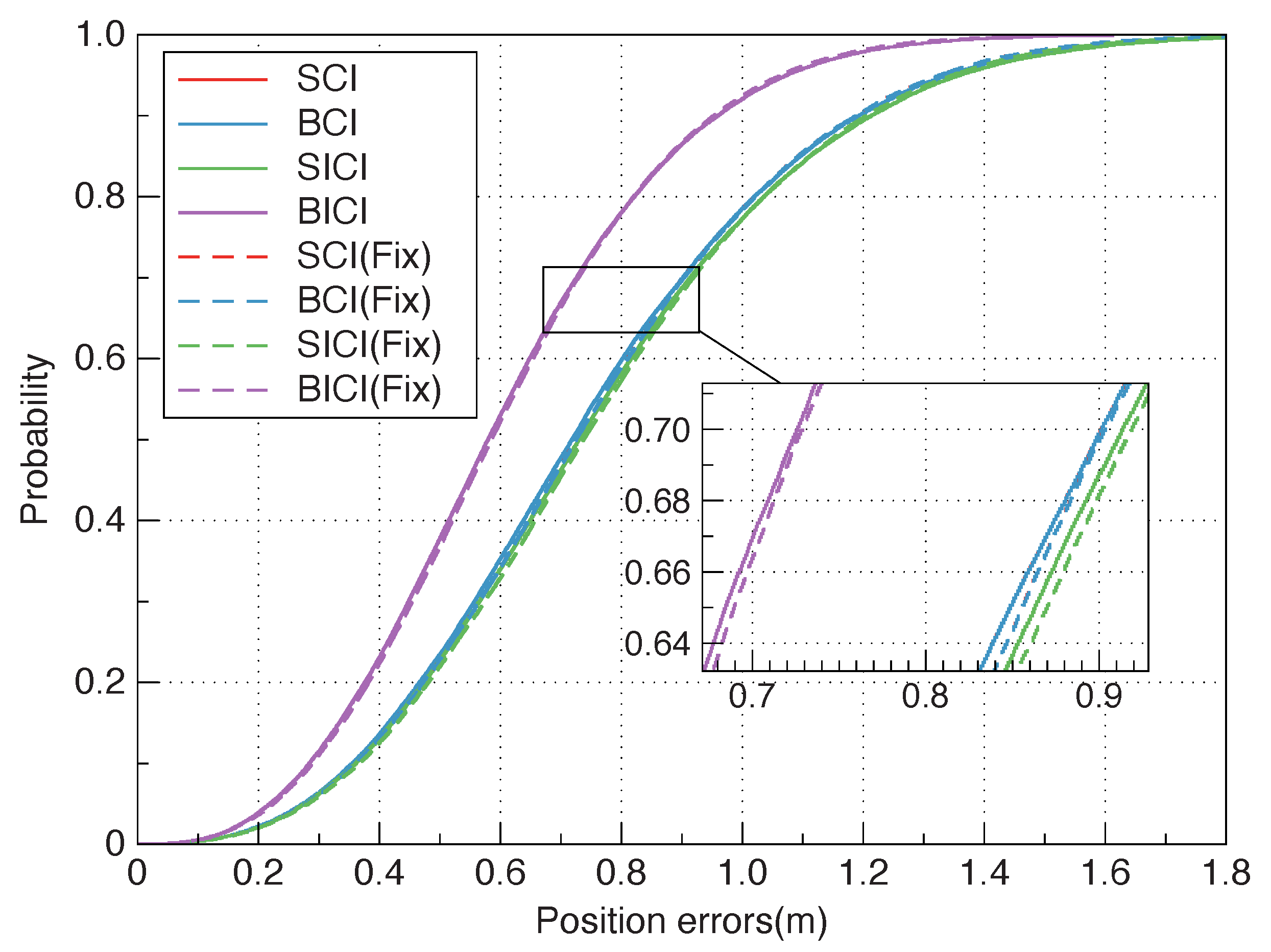
3.3. Simulation
4. Multi-Sensor Fusion Positioning Algorithm Based on BICI and IMM
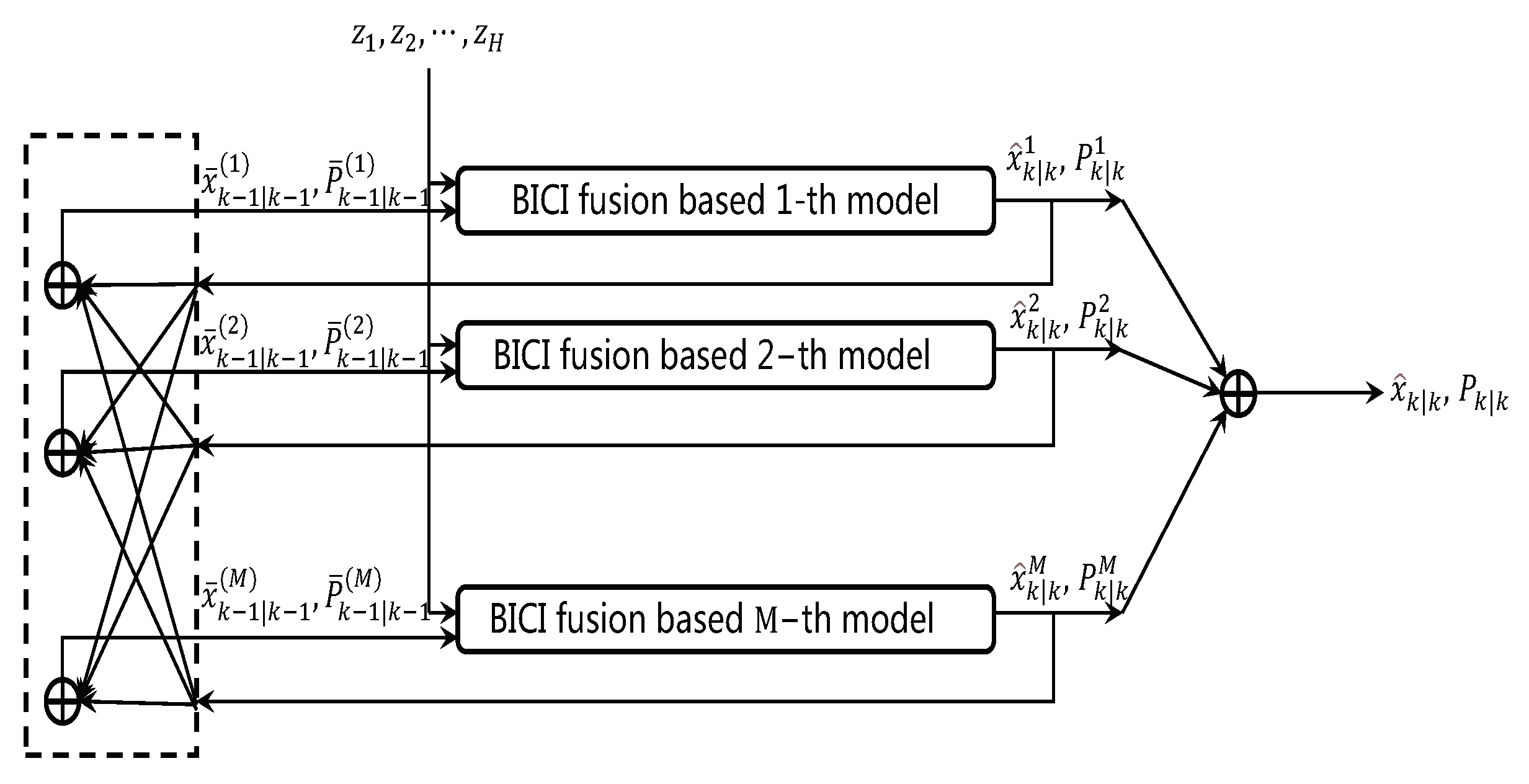
4.1. BICI-IMM Algorithm
4.2. Simulation
5. Experiment
5.1. Open Area Experiment
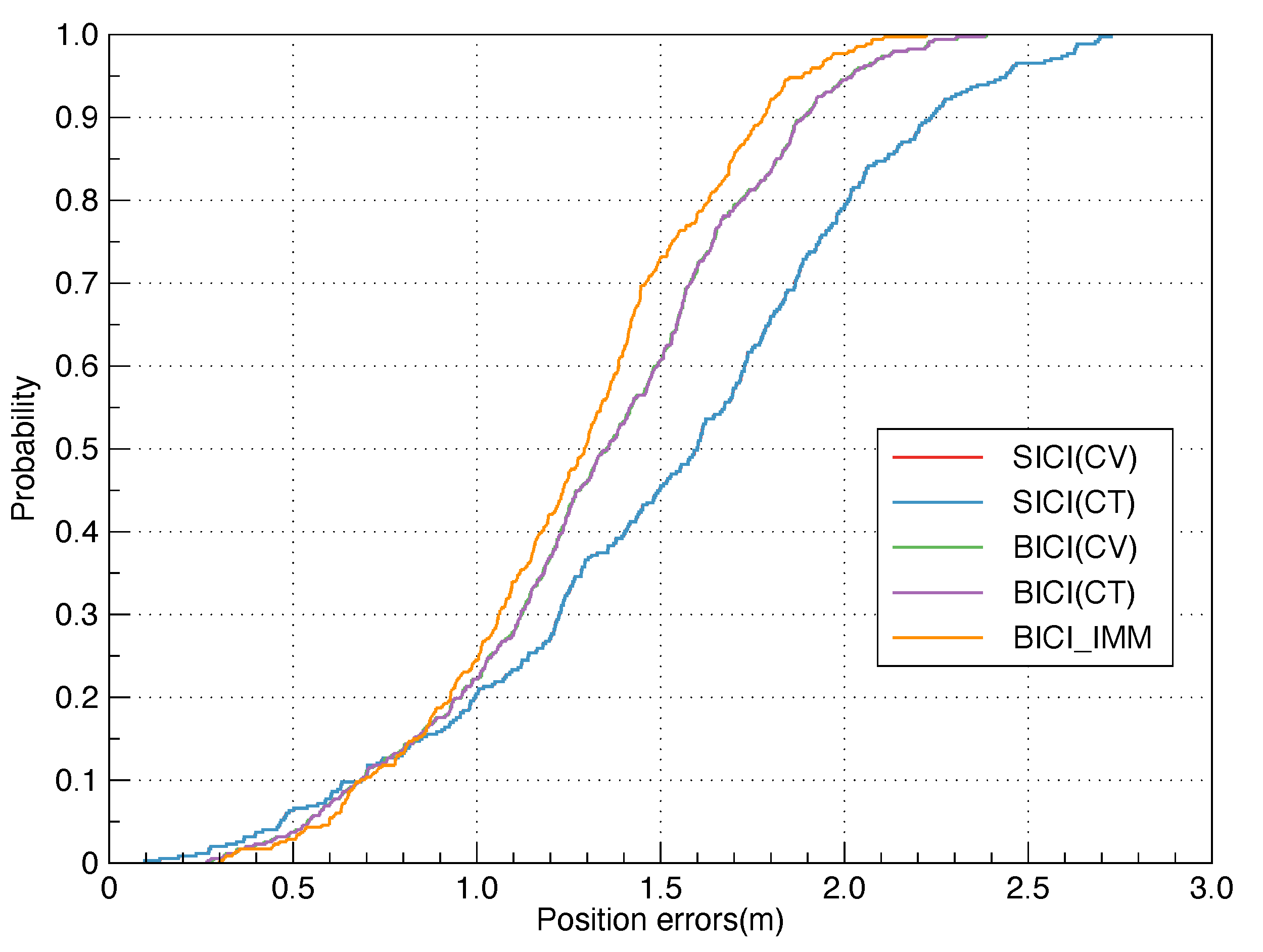
5.2. Semi-Open Area Experiment
6. Discussion
7. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| GNSS | Global Navigation Satellite Systems |
| CI | Covariance Intersection |
| CV | Constant Velocity |
| CT | Constant Turn |
| BCI | Batch Covariance Intersection |
| SCI | Sequential Covariance Intersection |
| PCI | Parallel Covariance Intersection |
| ICI | Inverse Covariance Intersection |
| SICI | Sequential Inverse Covariance Intersection |
| BICI | Batch Inverse Covariance Intersection |
| IMM | Interacting Multiple Model |
| RMS | Root Mean Square |
| CDF | Cumulative Distribution Function |
| RTK | Real-Time Kinematic |
References
- Cheng, L.; Huang, S.; Xue, M.; Bi, Y. A Robust Localization Algorithm Based on NLOS Identification and Classification Filtering for Wireless Sensor Network. Sensors 2020, 20, 6634. [Google Scholar] [CrossRef]
- Kułakowski, P.; Vales-Alonso, J.; Egea-López, E.; Ludwin, W.; García-Haro, J. Angle-of-arrival localization based on antenna arrays for wireless sensor networks. Comput. Electr. Eng. 2010, 36, 1181–1186. [Google Scholar] [CrossRef]
- Xue, W.; Qiu, W.; Hua, X.; Yu, K. Improved Wi-Fi RSSI measurement for indoor localization. IEEE Sens. J. 2017, 17, 2224–2230. [Google Scholar] [CrossRef]
- Wu, P.; Su, S.; Zuo, Z.; Guo, X.; Sun, B.; Wen, X. Time difference of arrival (TDoA) localization combining weighted least squares and firefly algorithm. Sensors 2019, 19, 2554. [Google Scholar] [CrossRef]
- Yu, X.M.; Wang, H.Q.; Wu, J.Q. A method of fingerprint indoor localization based on received signal strength difference by using compressive sensing. Eurasip. J. Wirel. Commun. Netw. 2020, 2020, 72. [Google Scholar] [CrossRef]
- Shirehjini, A.A.N.; Yassine, A.; Shirmohammadi, S. An RFID-Based Position and Orientation Measurement System for Mobile Objects in Intelligent Environments. IEEE Trans. Instrum. Meas. 2012, 61, 1664–1675. [Google Scholar] [CrossRef]
- Zhou, S.; Pollard, J.K. Position measurement using Bluetooth. IEEE Trans. Consum. Electr. 2006, 52, 555–558. [Google Scholar] [CrossRef]
- Qin, T.; Li, P.; Shen, S. VINS-Mono: A Robust and Versatile Monocular Visual-Inertial State Estimator. IEEE Trans. Robot 2018, 34, 1004–1020. [Google Scholar] [CrossRef]
- Xu, H.; Wang, L.; Zhang, Y.; Qiu, K.; Shen, S. Decentralized Visual-Inertial-UWB Fusion for Relative State Estimation of Aerial Swarm. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 8776–8782. [Google Scholar] [CrossRef]
- Han, Y. Optical Flow/INS Navigation System in Four-rotor. In Proceedings of the 2019 5th International Conference on Systems, Control and Communications, Wuhan, China, 21–23 December 2019; pp. 1–5. [Google Scholar]
- Fung, M.L.; Chen, M.Z.; Chen, Y.H. Sensor fusion: A review of methods and applications. In Proceedings of the 2017 29th Chinese Control And Decision Conference (CCDC), Chongqing, China, 28–30 May 2017; pp. 3853–3860. [Google Scholar]
- Hubert, M.; Debruyne, M.; Rousseeuw, P.J. Minimum covariance determinant and extensions. Wiley Interdiscip. Rev. Comput. Stat. 2018, 10, e1421. [Google Scholar] [CrossRef]
- Kalina, J. The minimum weighted covariance determinant estimator revisited. Commun. Stat. Simul. Comput. 2020, 1–13. [Google Scholar] [CrossRef]
- Julier, S.J.; Uhlmann, J.K. A non-divergent estimation algorithm in the presence of unknown correlations. Proc. Am. Control Conf. 1997, 4, 2369–2373. [Google Scholar]
- Munz, M.; Mahlisch, M.; Dietmayer, K. Generic Centralized Multi Sensor Data Fusion Based on Probabilistic Sensor and Environment Models for Driver Assistance Systems. IEEE Intell. Transp. Syst. Mag. 2010, 2, 6–17. [Google Scholar] [CrossRef]
- Deng, Z.; Zhang, P.; Qi, W.; Liu, J.; Gao, Y. Sequential covariance intersection fusion Kalman filter. Inf. Sci. Int. J. 2012, 189, 293–309. [Google Scholar] [CrossRef]
- Zhang, P.; Qi, W.J.; Deng, Z.L. Parallel Covariance Intersection Fusion Optimal Kalman Filter. Appl. Mech. Mater. 2013, 475, 436–441. [Google Scholar] [CrossRef]
- Sijs, J.; Lazar, M. State fusion with unknown correlation: Ellipsoidal intersection. Automatica 2012, 48, 1874–1878. [Google Scholar] [CrossRef]
- Zarei-Jalalabadi, M.; Malaek, S.M.B.; Kia, S.S. A Track-to-Track Fusion Method for Tracks With Unknown Correlations. IEEE Control Syst. Lett. 2017, 2, 189–194. [Google Scholar] [CrossRef]
- Noack, B.; Sijs, J.; Hanebeck, U.D. Algebraic analysis of data fusion with ellipsoidal intersection. In Proceedings of the IEEE International Conference on Multisensor Fusion & Integration for Intelligent Systems, Baden-Baden, Germany, 19–21 September 2017. [Google Scholar]
- Noack, B.; Sijs, J.; Reinhardt, M.; Hanebeck, U.D. Decentralized data fusion with inverse covariance intersection. Automatica 2017, 79, 35–41. [Google Scholar] [CrossRef]
- Chen, L.; Yu, K.; Wu, K.; Gao, Y.; Huo, Y.; Ran, C.; Dou, Y. Sequential Inverse Covariance Intersection Fusion Kalman Filter for Multi-sensor Systems with Packet Dropouts and Multiplicative Noise. In Proceedings of the 2020 Chinese Automation Congress (CAC), Shanghai, China, 6–8 November 2020; pp. 1335–1340. [Google Scholar]
- Tang, M.; Rong, Y.; Zhou, J.; Li, X.R. Information geometric approach to multisensor estimation fusion. IEEE Trans. Signal Process. 2018, 67, 279–292. [Google Scholar] [CrossRef]
- Blom, H.A. An efficient filter for abruptly changing systems. In Proceedings of the 23rd IEEE Conference on Decision and Control, Las Vegas, NV, USA, 12–14 December 1984; pp. 656–658. [Google Scholar]
- Visina, R.; Bar-Shalom, Y.; Willett, P.; Dey, D. On-demand track-to-track fusion using local IMM inside information. In Proceedings of the Signal Processing, Sensor/Information Fusion, and Target Recognition XXVIII, Baltimore, MD, USA, 15–17 April 2019; International Society for Optics and Photonics: Bellingham, WA, USA, 2019; Volume 11018, p. 1101804. [Google Scholar]
- Li, W.; Jia, Y. An information theoretic approach to interacting multiple model estimation. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1811–1825. [Google Scholar] [CrossRef]
- Li, L.; Wu, S.; Li, X. Multi-Object Tracking Based on Deep Probability Fusion with Holistic Feature Reprentation and IMM-JIPDA. In Proceedings of the 2019 16th International Computer Conference on Wavelet Active Media Technology and Information Processing, Chengdu, China, 14–15 December 2019; pp. 295–302. [Google Scholar]
- Ma, Y.; Zhao, S.; Huang, B. Multiple-model state estimation based on variational Bayesian inference. IEEE Trans. Autom. Contrl 2018, 64, 1679–1685. [Google Scholar] [CrossRef]
- Wang, N.; Li, Y.; Cong, J.; Sheng, A. Sequential covariance intersection-based Kalman consensus filter with intermittent observations. IET Signal Process 2020, 14, 624–633. [Google Scholar] [CrossRef]
- Huber, P.J. Robust Statistics; John Wiley & Sons: Hoboken, NJ, USA, 2004; Volume 523. [Google Scholar]
- Qi, W.J.; Zhang, P.; Nie, G.H.; Deng, Z.L. Robust weighted fusion Kalman predictors with uncertain noise variances. Digit. Signal Process. 2014, 30, 37–54. [Google Scholar] [CrossRef]
- Kailath, T.; Sayed, A.H.; Hassibi, B. Linear Estimation; Number Book; Prentice Hall: Hoboken, NJ, USA, 2000. [Google Scholar]
- Zhu, C.; Xia, Y.; Xie, L.; Yan, L. Optimal linear estimation for systems with transmission delays and packet dropouts. IET Signal Process 2013, 7, 814–823. [Google Scholar] [CrossRef]
- Kirubarajan, T.; Bar-Shalom, Y.; Pattipati, K.R.; Kadar, I. Ground target tracking with variable structure IMM estimator. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 26–46. [Google Scholar] [CrossRef]
- Niehsen, W. Information fusion based on fast covariance intersection filtering. In Proceedings of the Fifth International Conference on Information Fusion, FUSION 2002 (IEEE Cat. No. 02EX5997), Annapolis, MD, USA, 8–11 July 2002; Volume 2, pp. 901–904. [Google Scholar]
- Buscarino, A.; Fortuna, L.; Frasca, M.; Rizzo, A. Dynamical network interactions in distributed control of robots. Chaos Interdiscip. J. Nonlinear Sci. 2006, 16, 015116. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Algorithms | Positioning Error (m) |
|---|---|
| SCI | 0.88 |
| BCI | 0.88 |
| SICI | 0.90 |
| BICI | 0.71 |
| SCI (fix) | 0.88 |
| BCI (fix) | 0.88 |
| SICI (fix) | 0.90 |
| BICI (fix) | 0.71 |
| Time (s) | Motion Model |
|---|---|
| CV | |
| CT | |
| CV | |
| CT | |
| CV | |
| CT |
| Algorithm | RMS Positioning Error (m) |
|---|---|
| BICI-IMM | 0.47 |
| BICI (CV) | 0.53 |
| BICI (CT) | 0.56 |
| SICI (CV) | 0.70 |
| SICI (CT) | 0.71 |
| Algorithms | Positioning Error (m) |
|---|---|
| BICI-IMM | 1.27 |
| BICI (CV) | 1.49 |
| BICI (CT) | 1.484 |
| SICI (CV) | 1.559 |
| SICI (CT) | 1.561 |
| Algorithms | Positioning Error (m) |
|---|---|
| BICI-IMM | 1.44 |
| BICI (CV) | 1.564 |
| BICI (CT) | 1.563 |
| SICI (CV) | 1.838 |
| SICI (CT) | 1.839 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Liu, Y.; Deng, Z.; Hu, E. Multi-Sensor Fusion Positioning Method Based on Batch Inverse Covariance Intersection and IMM. Appl. Sci. 2021, 11, 4908. https://doi.org/10.3390/app11114908
Liu Y, Deng Z, Hu E. Multi-Sensor Fusion Positioning Method Based on Batch Inverse Covariance Intersection and IMM. Applied Sciences. 2021; 11(11):4908. https://doi.org/10.3390/app11114908
Chicago/Turabian StyleLiu, Yanxu, Zhongliang Deng, and Enwen Hu. 2021. "Multi-Sensor Fusion Positioning Method Based on Batch Inverse Covariance Intersection and IMM" Applied Sciences 11, no. 11: 4908. https://doi.org/10.3390/app11114908
APA StyleLiu, Y., Deng, Z., & Hu, E. (2021). Multi-Sensor Fusion Positioning Method Based on Batch Inverse Covariance Intersection and IMM. Applied Sciences, 11(11), 4908. https://doi.org/10.3390/app11114908