A Novel Way to Automatically Plan Cellular Networks Supported by Linear Programming and Cloud Computing

 , , , and
, , , and
Abstract
1. Introduction
2. Materials and Methods
2.1. Cellular Planning
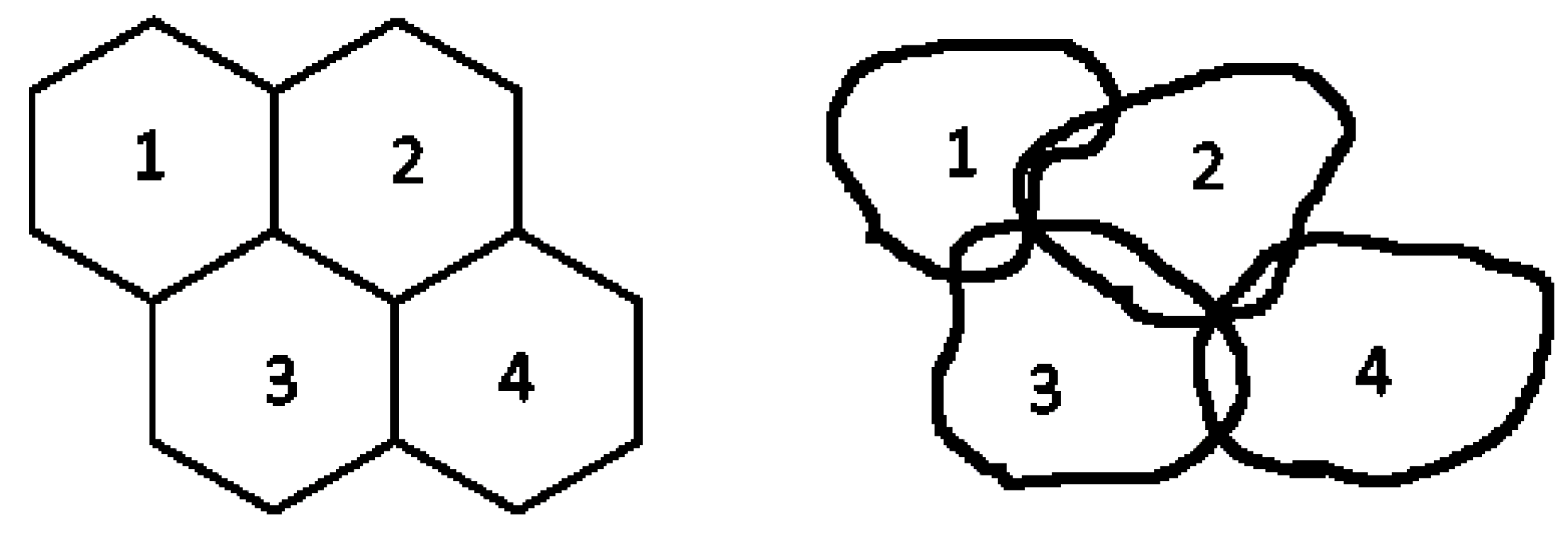
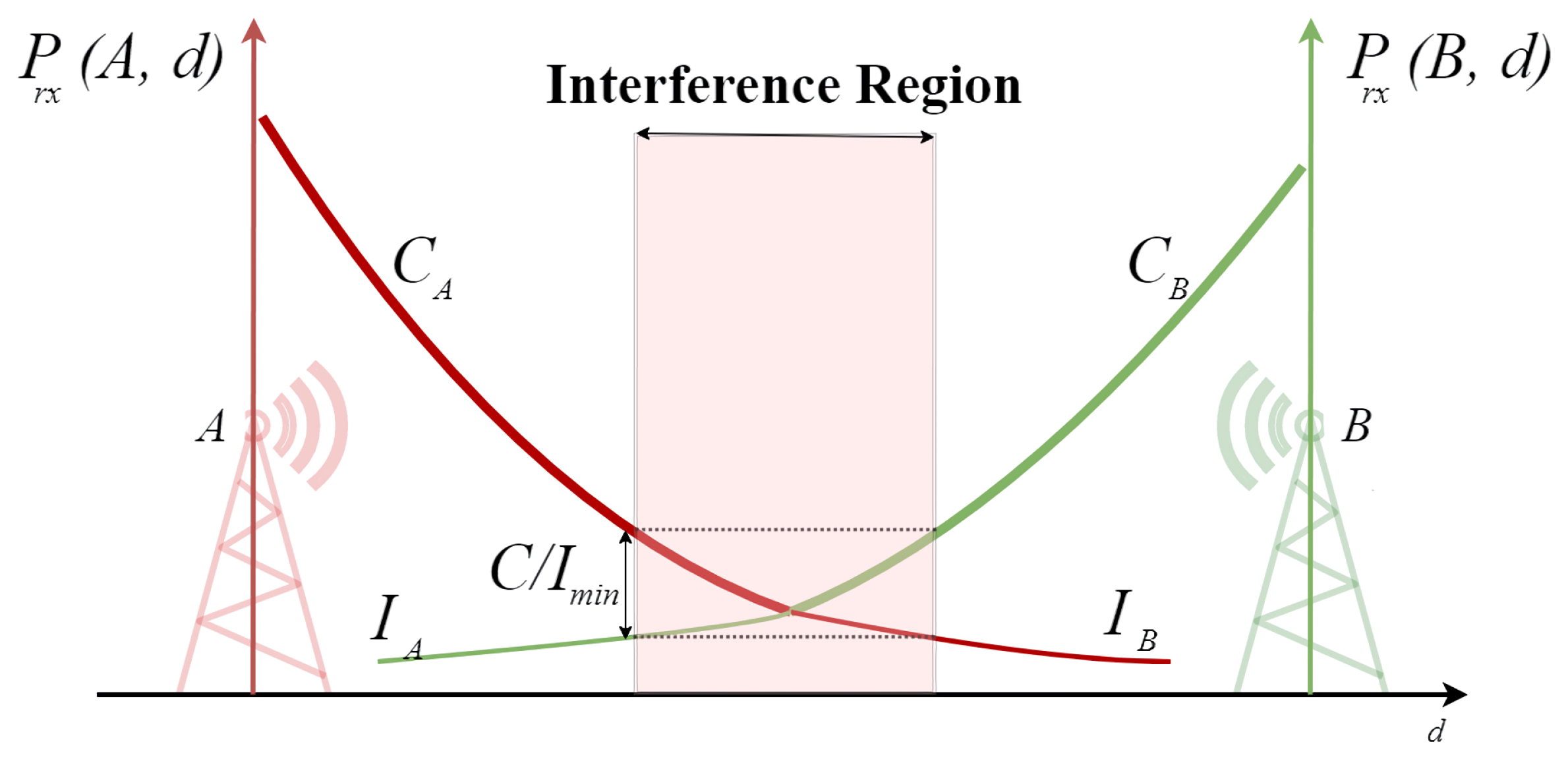
- Co-channel interference: The interference created from other cells with the same frequency. This is solved by spacing cells with the same frequency and splitting the cell in sectors (sectorization).
- Adjacent Interference: The interference coming from adjacent channels in adjacent cells. This is easily solved with quality filters and making sure there are sufficient differences between the frequencies used in those cells.
- Self interference: A consequence from a cell’s signal reflecting from obstacles (buildings, mountains, etc.). Solved by correctly splitting downlink and uplink frequencies.
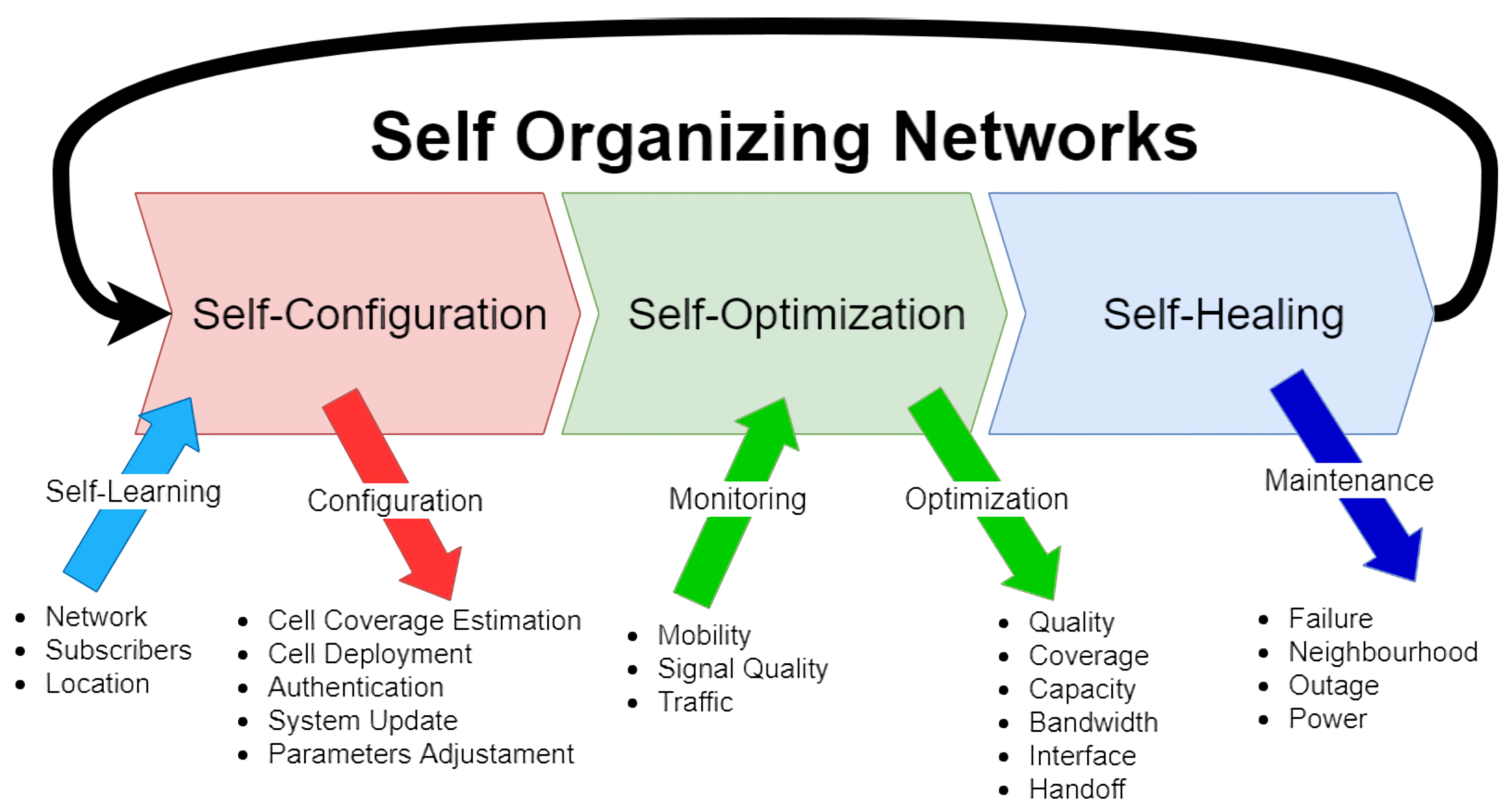
2.2. Self-Organizing Networks
- Self-configuration: Following the idea of “plug and play,” this section is responsible for configuring a new node in a network, not only in connectivity but also for transferring the network parameters to that node.
- Self-optimization: Responsible for important factors in the network, such as topology, propagation, and interference (the one which is covered in this paper).
- Self-healing: In case some nodes fail. This section is responsible for warning the other nodes of that failure in order to reduce the impacts on the network’s services.
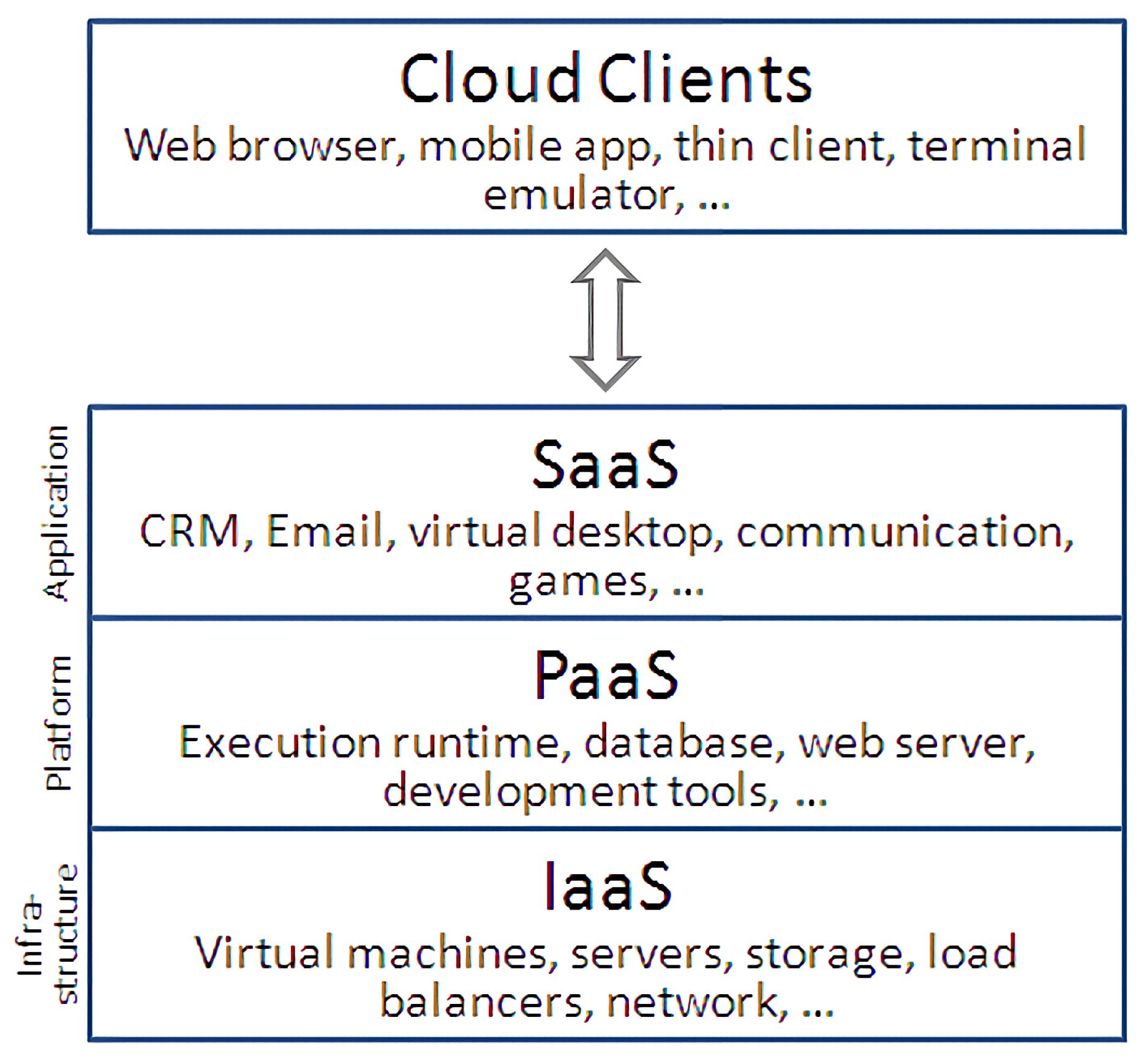
2.3. Cloud Services
- Infrastructure as a service (IaaS): Where the consumer is able to deploy and run arbitrary software, which can include operating systems and applications. The consumer does not manage or control the underlying cloud infrastructure but has control over operating systems, storage, and deployed applications; and possibly limited control of select networking components (e.g., host firewalls).
- Platform as a service (PaaS): The capability provided to the consumer is to deploy onto the cloud infrastructure consumer-created or acquired applications created using programming languages, libraries, services, and tools supported by the provider. The consumer does not manage or control the underlying cloud infrastructure including network, servers, operating systems, or storage, but has control over the deployed applications and possibly configuration settings for the application-hosting environment.
- Software as a service (SaaS): The capability provided to the consumer is to use the provider’s applications running on a cloud infrastructure. The applications are accessible from various client devices through either a thin client interface, such as a web browser (e.g., web-based email), or a program interface. The consumer does not manage or control the underlying cloud infrastructure including network, servers, operating systems, storage, or even individual application capabilities, with the possible exception of limited user-specific application configuration settings.
2.4. Metric SaaS and Other Commercial Tools
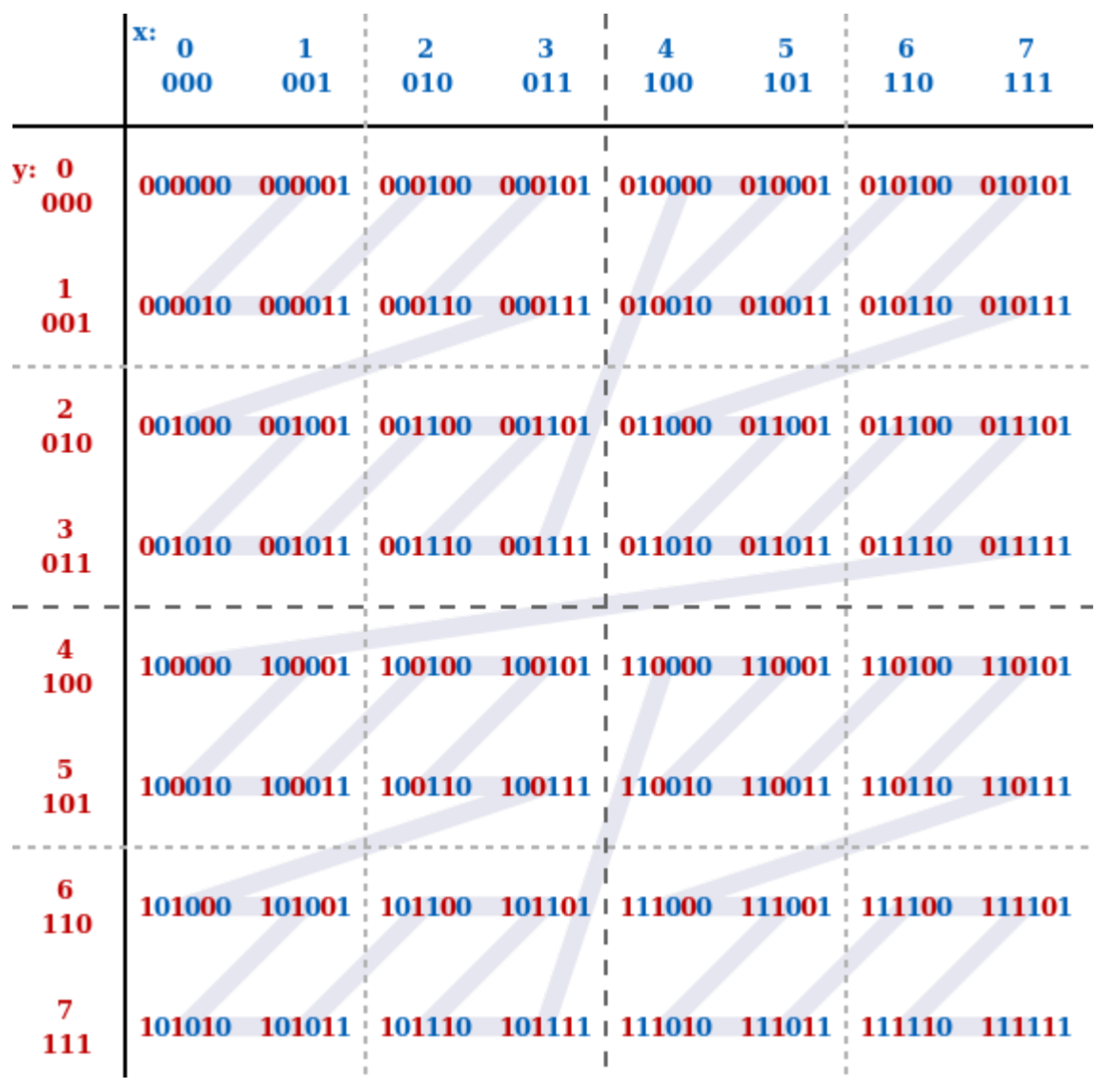
2.5. Z-Order Curve and Geohash
2.6. Linear Programming
- CPLEX-LP: Used in IBM ILOG CPLEX Optimization Studio, a commercially available optimization software package. More user-friendly than the others.
- MPS: Mathematical Programming System is a file format used in both linear programming and mixed integer programming problems. There are some limitations though; for example, numeric fields limited to 12 characters. Modern extensions of this format, without those limitations, are also accepted by GLPK.
- GLPK: A custom format, similar to DINAMICS format, a format created by the Center for Discrete Mathematics and Theoretical Computer Science;
- MathProg—High level modelling language. GLPK MathProg translator is not appropriate for large models, due to its taking a considerable amount of time with big problems. This happens because the translator is not able to recognize shortcuts on the optimization.
2.7. Optimization Algorithm for Planning
2.8. Architecture
- Cell coverage estimation module: Responsible for estimating a cell power around its location.
- Cell grid intersections module: Responsible for understanding which cell coverage intersects.
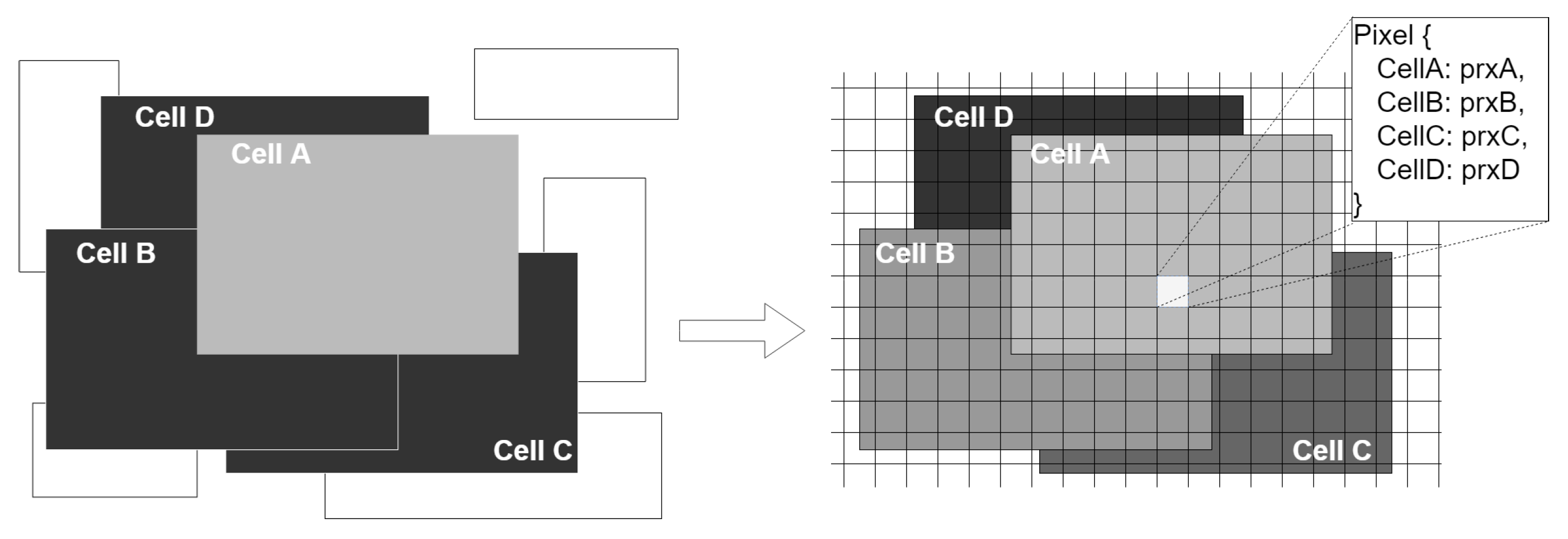
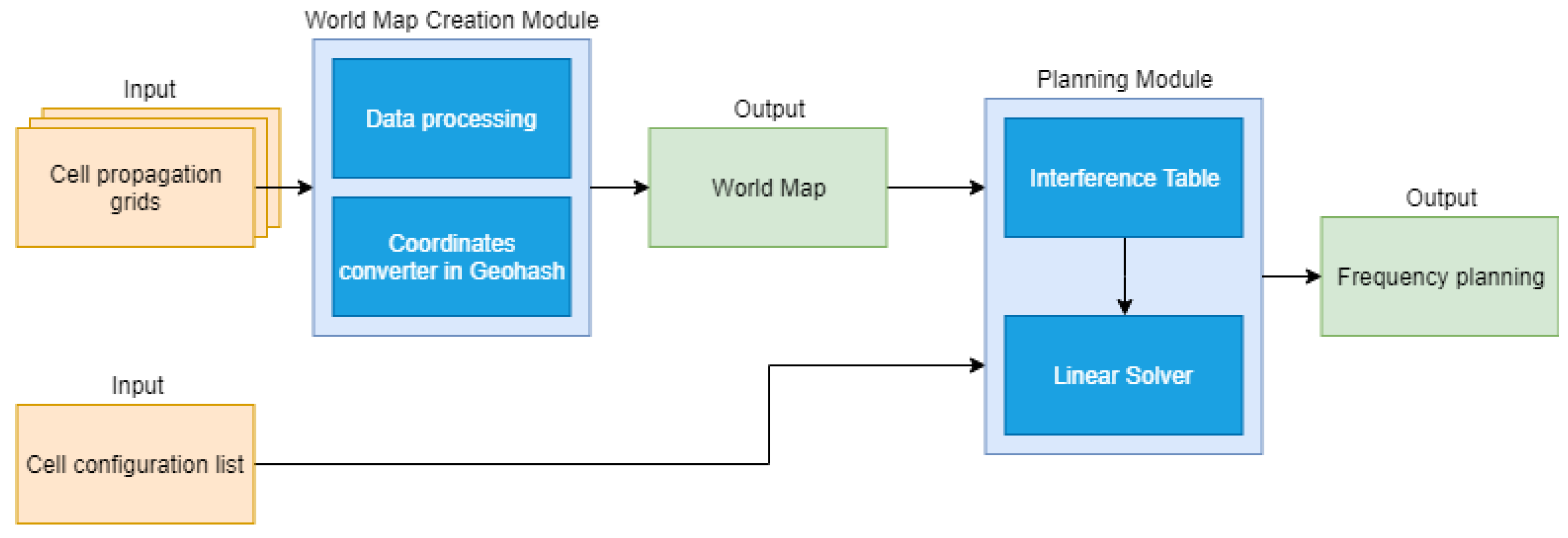
- World map creation module: Responsible for creating a world map, which is a data structure containing a set of pixels identified by their hashes—in this case, Geohashes. Each pixel will have an undefined number of pairs of cell/power.
- Planning module: Responsible for applying a linear optimization and its defined rules to the data generated by the previous modules.
2.9. Cell Coverage Estimation Module
2.10. Cell Grid Intersection Module
2.11. World Map Creation Module
2.12. Planning Module
2.13. Technology Used
2.14. Implementation of the Work Pattern
- Maximum memory allocated is 3008 MB;
- Timeout of 900 s (15 min);
- Virtual storage is limited to 500 MB.
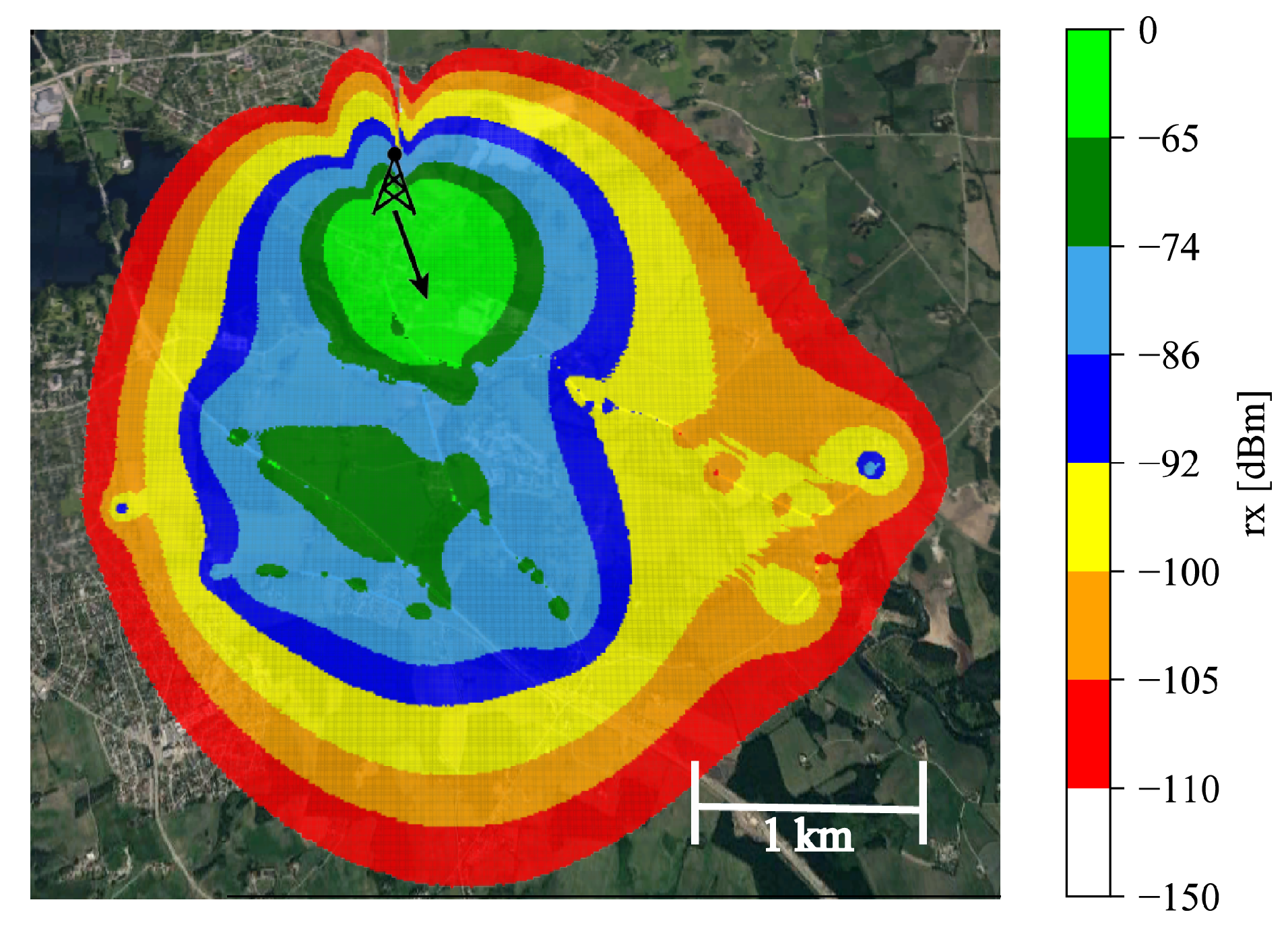
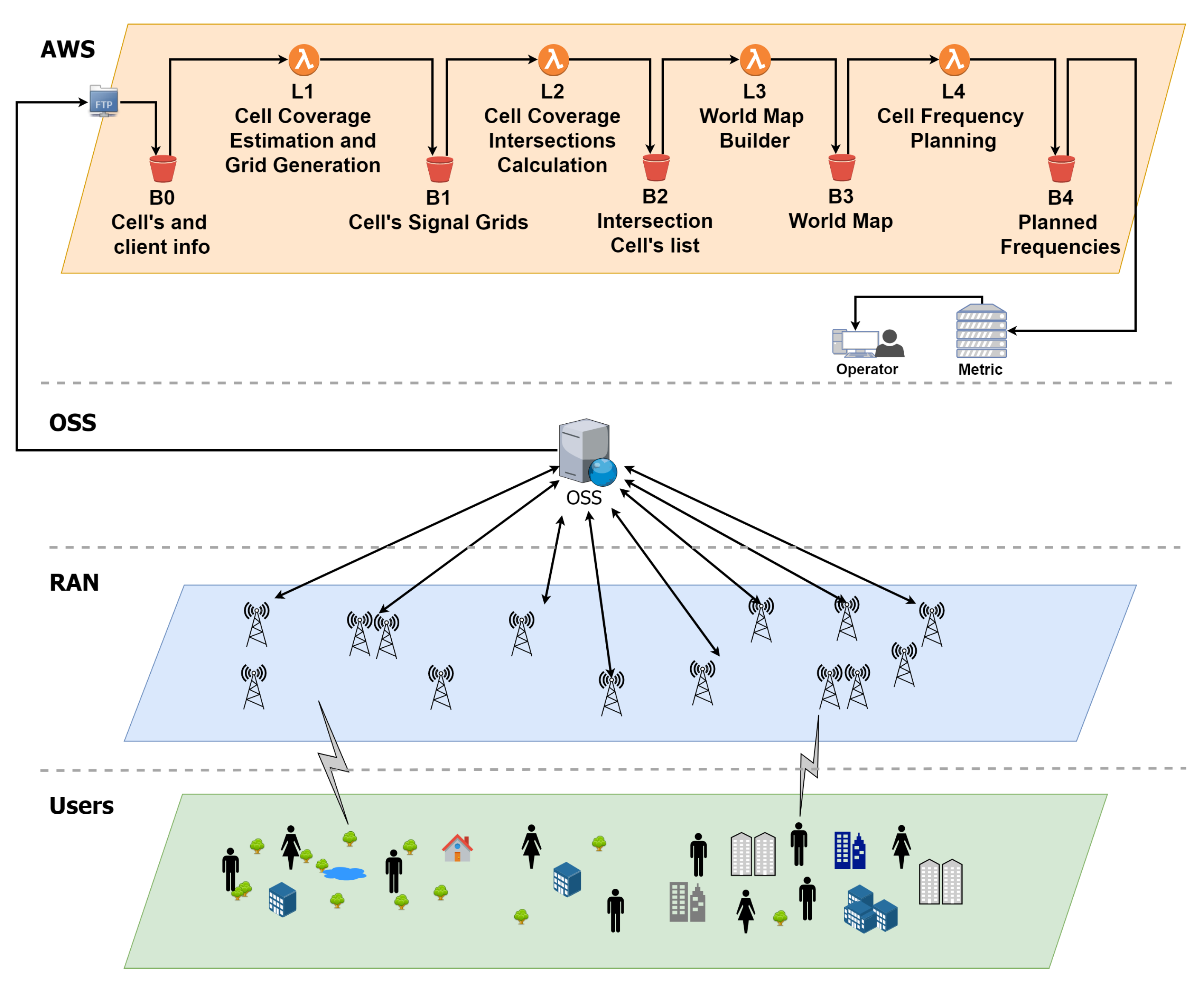
- Cell coverage estimation and grid generationAWS Lambda (L1): Using client information imported from a S3 bucket (B0), this lambda creates a pixelized grid with coverage information around an antenna. This coverage is calculated using propagation modules, drive tests, and other cell parameters, such as elevation, azimuth, and tilt [32]. Those grids will be saved in an S3 bucket (B1);
- IntersectionsAWS Lambda (L2): Using a metadata file imported from B1, L2 compiles that data verifying which cells’ coverage intersects, by getting two opposite max distance corners. Finally, it outputs that data in a CSV file to B2.
- World MapAWS Lambda (L3): This lambda is responsible for creating a TSV file with Geohash keys and pairs of cell/power, which we call a “World Map.” Both those grids and the map must have the same Geohash precision (BitSet size) in order to avoid scale/localization incoherence. First, we use the intersection files from B2 to iterate trough the set of cells that we are trying to plan and find the corresponding intersection files. A new set of cells is created that includes all the cells that intersect the ones we are trying to plan. We use the propagation grids of those cells (imported from B1) to compile and create a world map containing all those cells. At first, we tried to use a Json file, but its size ended up being too large to read in a reasonable amount of time.
- PlanningAWS Lambda (L4): First, we count both the amount of interference in the world map, and the amount of possible interference in the case in which the unplanned cells end up with the same frequency. Reminder that interference is defined by Equation (1). All data are written and sent to the GLPSOl module from GLPK library [33], a linear solver, in a “mathProg” file. In that file is also written the solver’s objective (Equation (2)) and all rules (Equations (3)–(7)). The outputted solution should have multiple where x equals either 1 or 0. In case of the former, it means that frequency f should be attributed to cell c. That data are exported using a regex—“(\d+),(\w*)\s?\W*1”—computed, and sent back to the user.
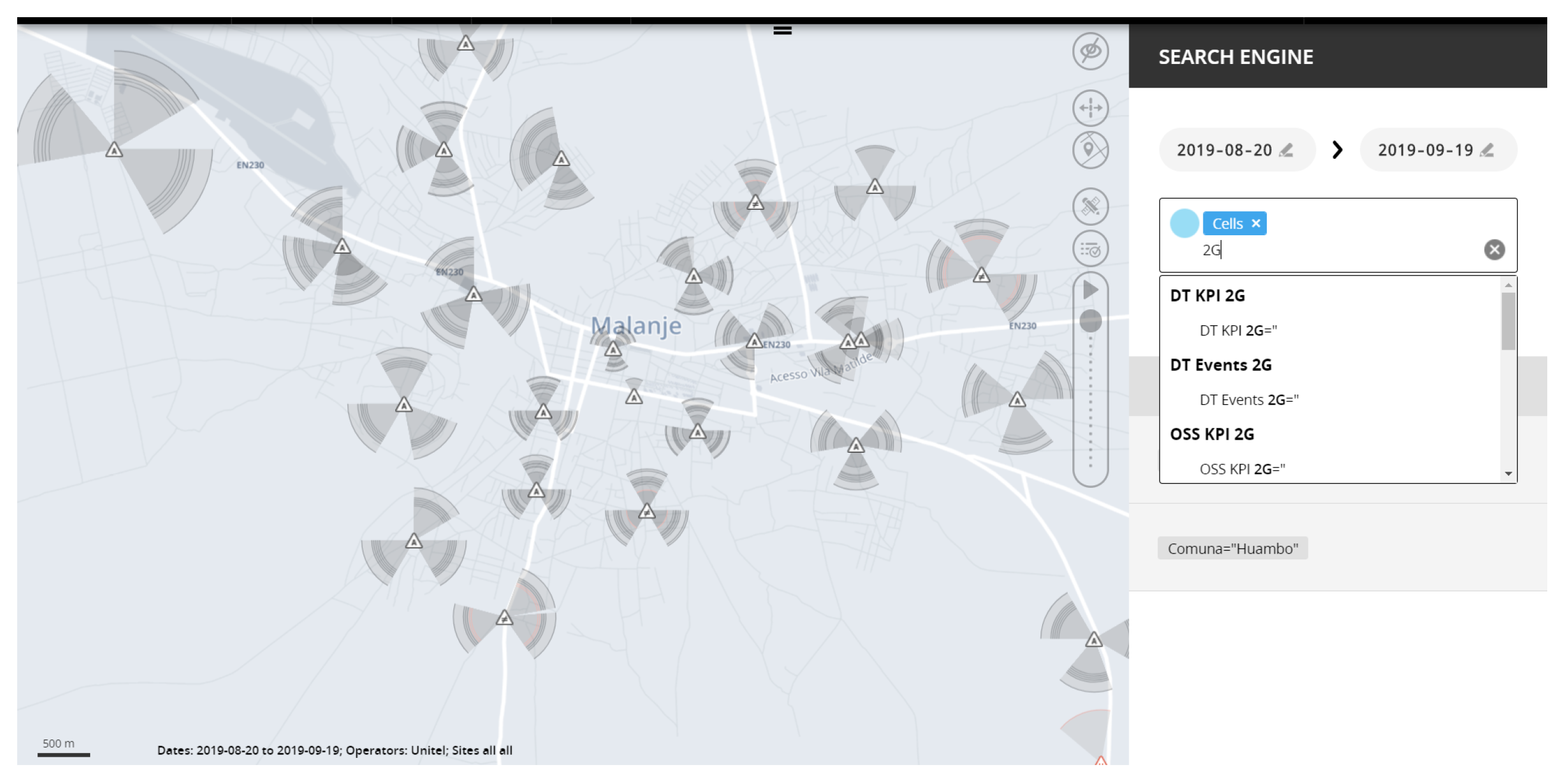
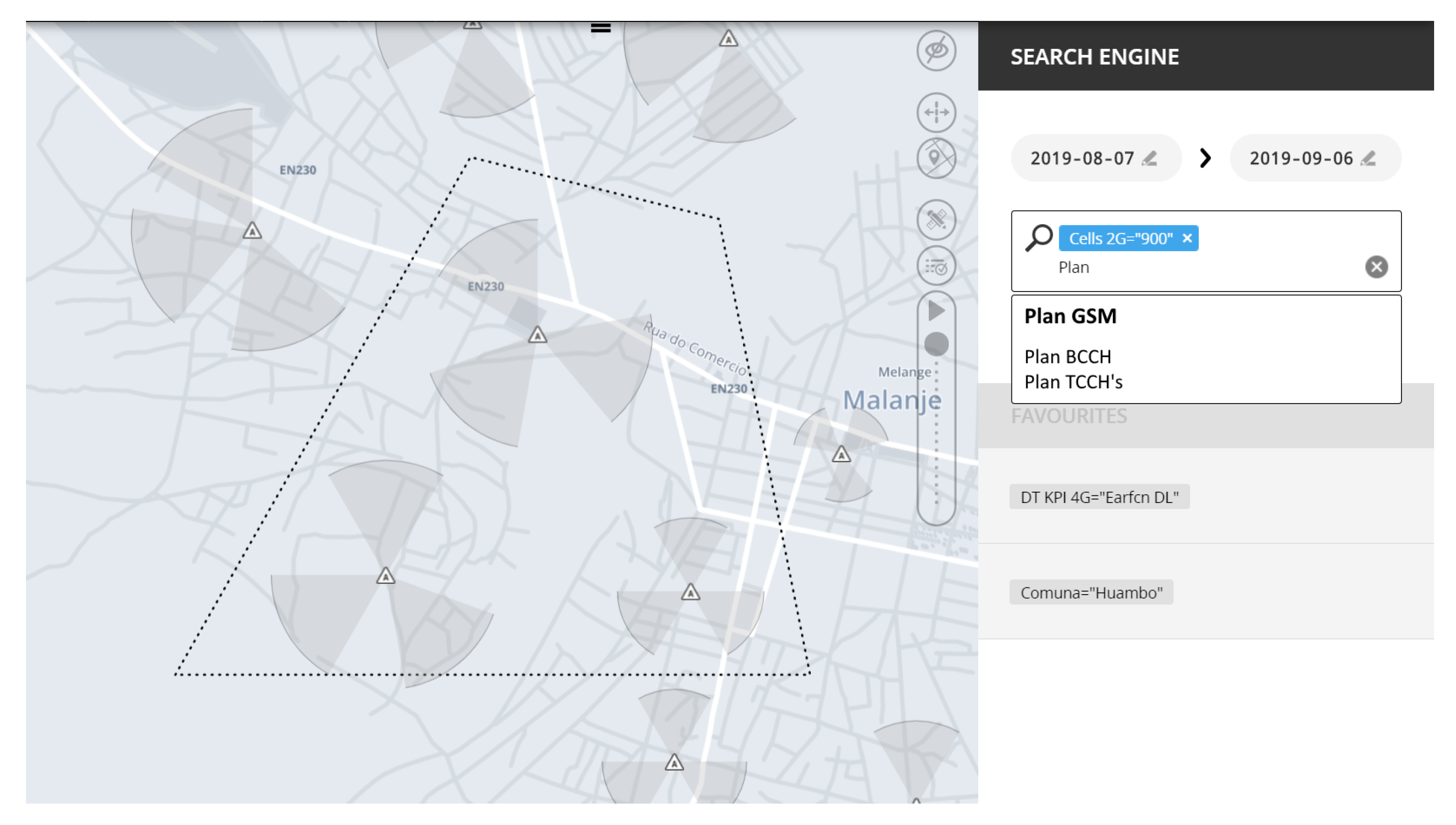
2.15. Integration in Metric
3. Experiment, Results, and Discussion
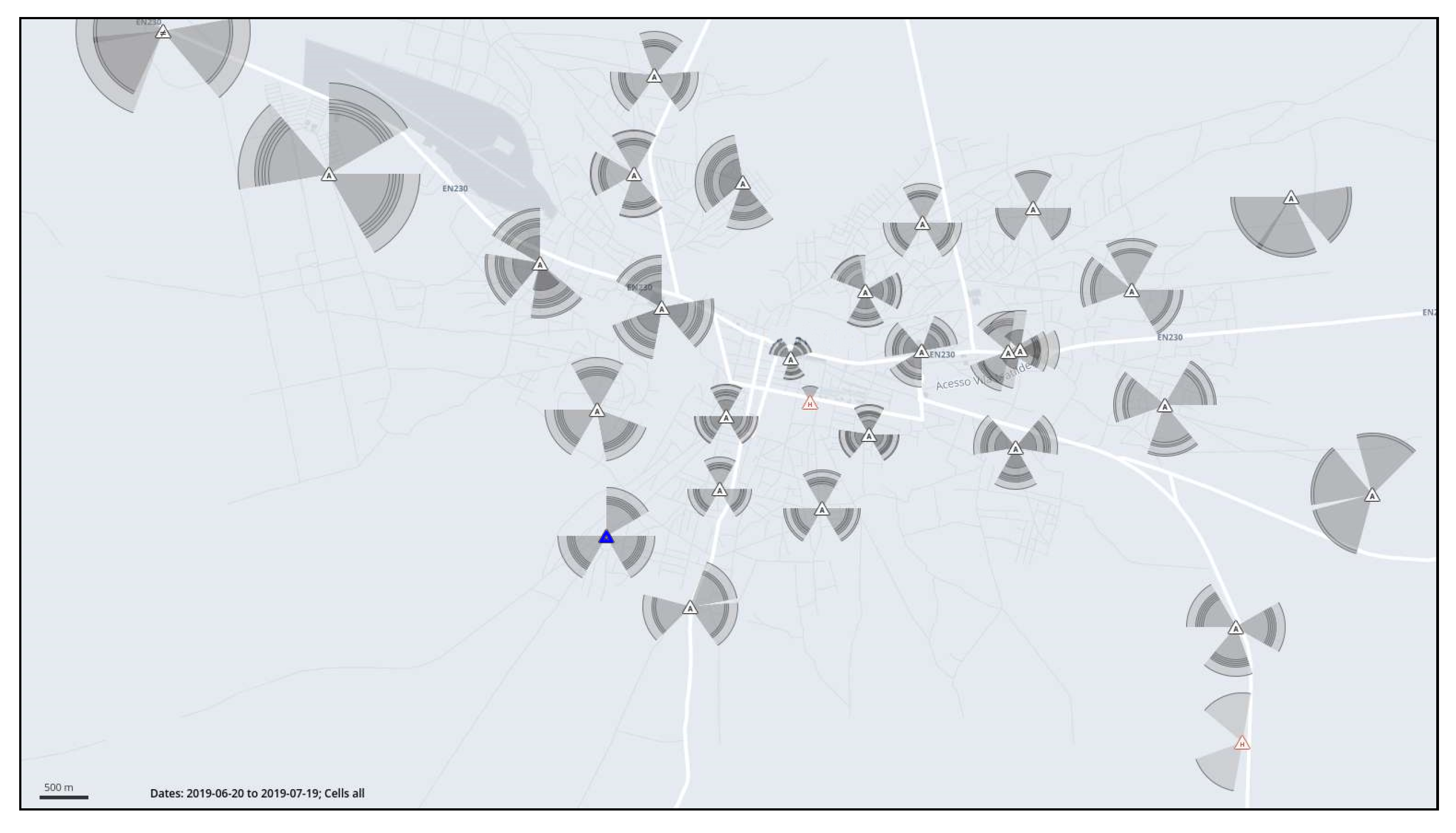
3.1. Evaluation Scenario
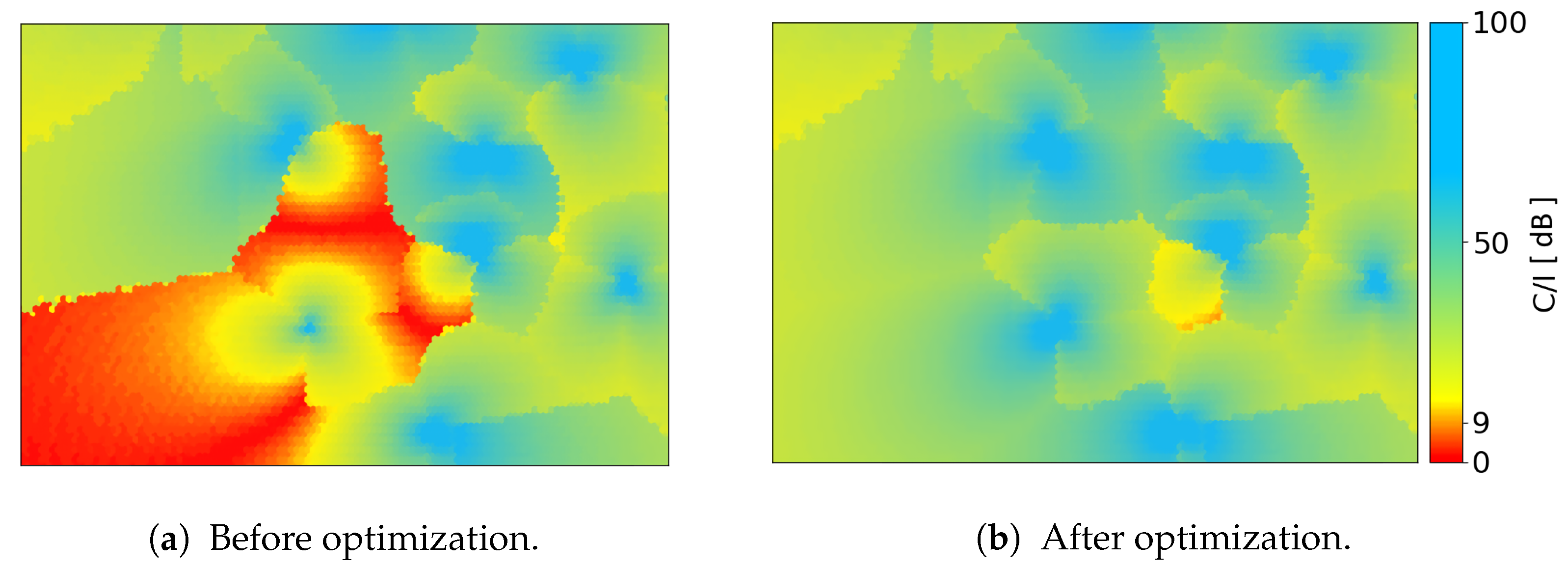
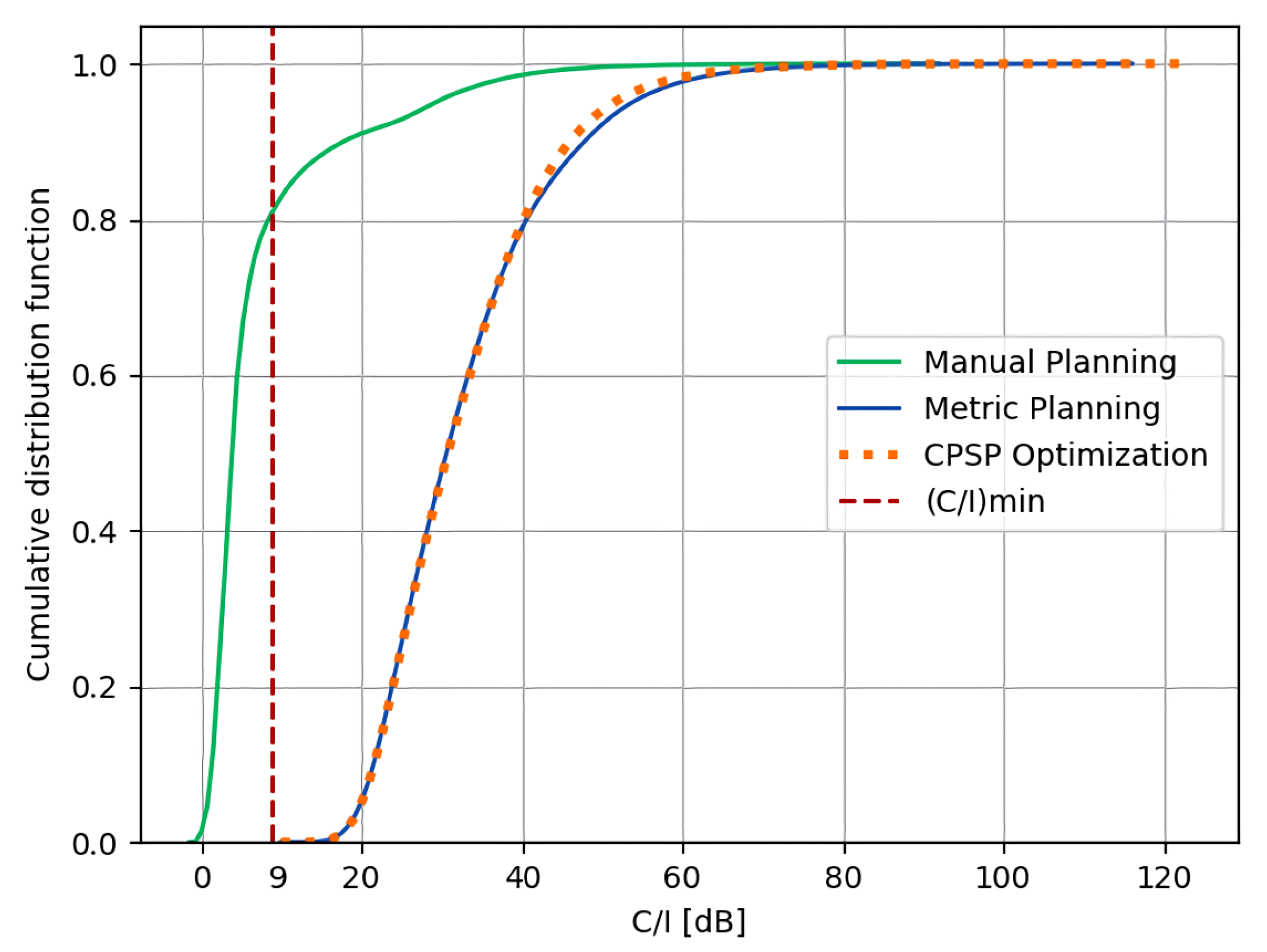
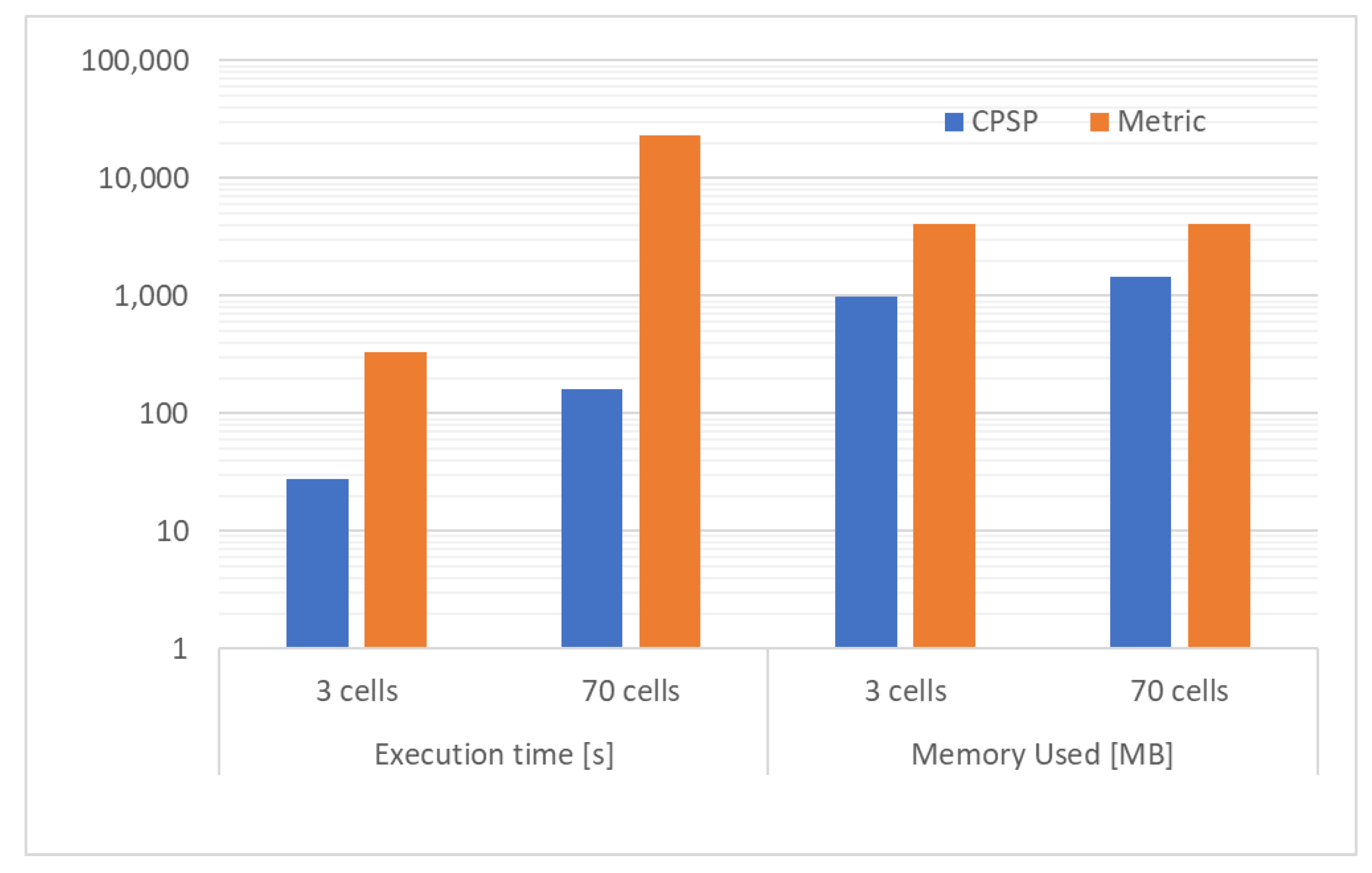
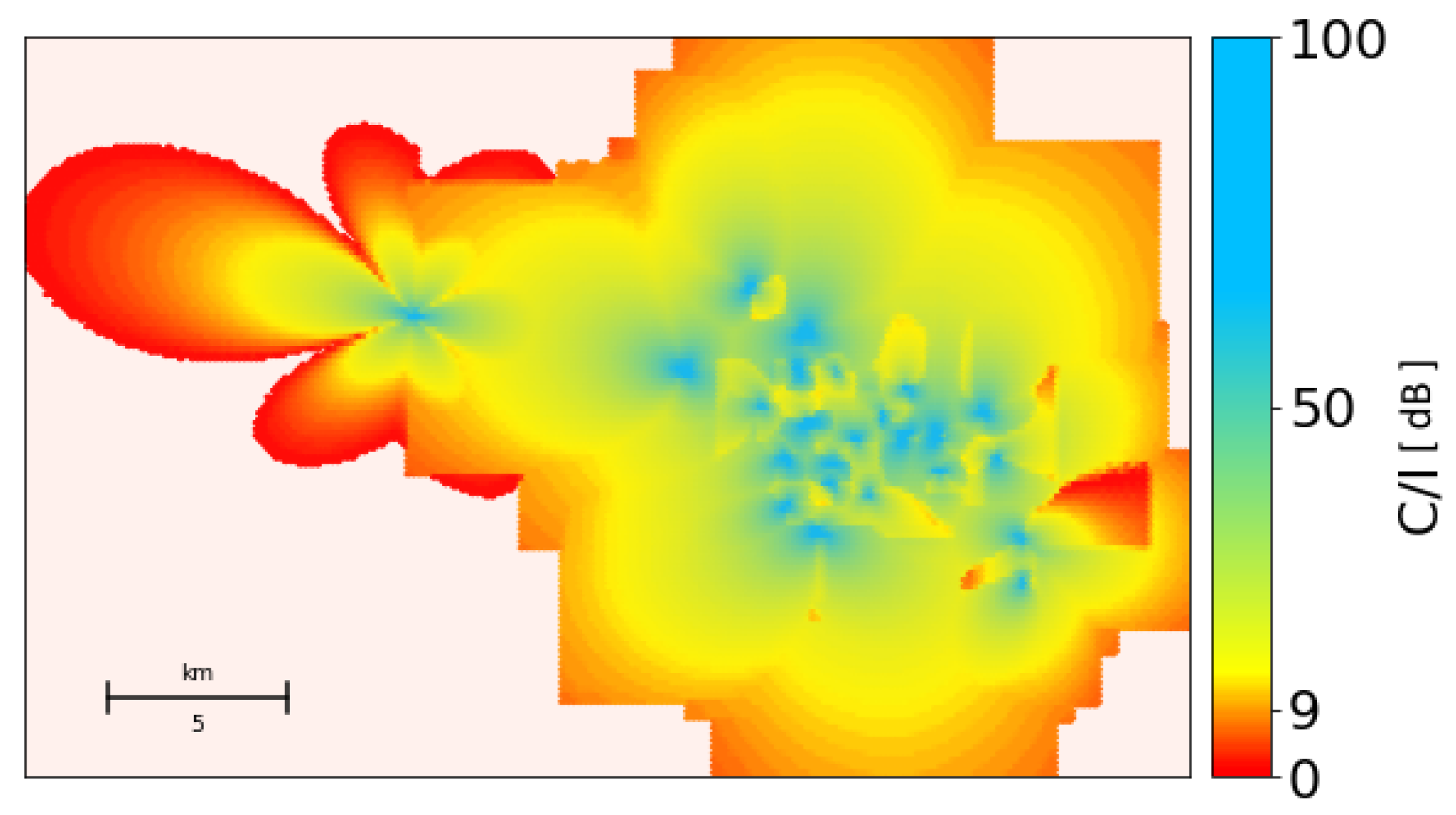
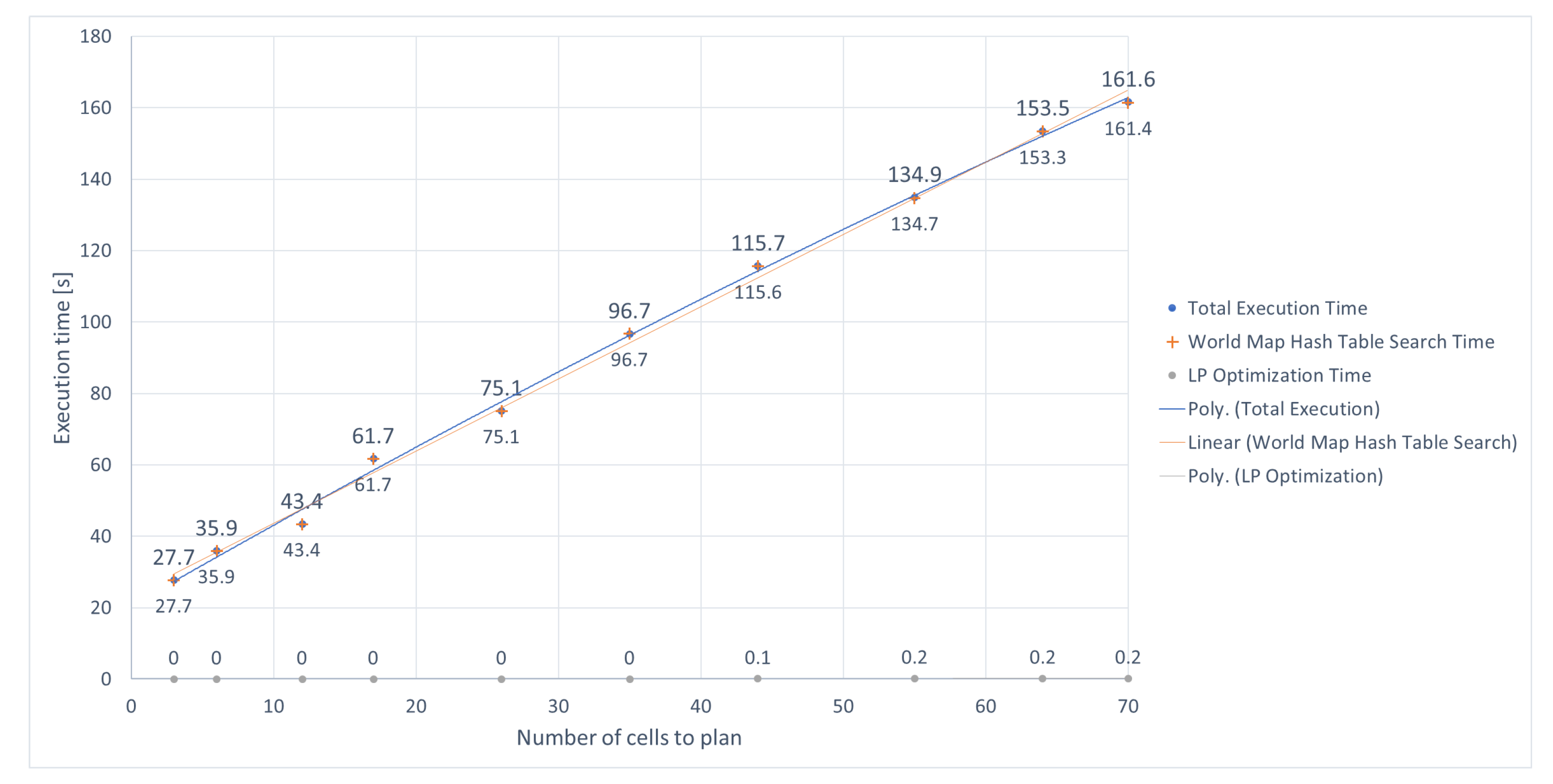
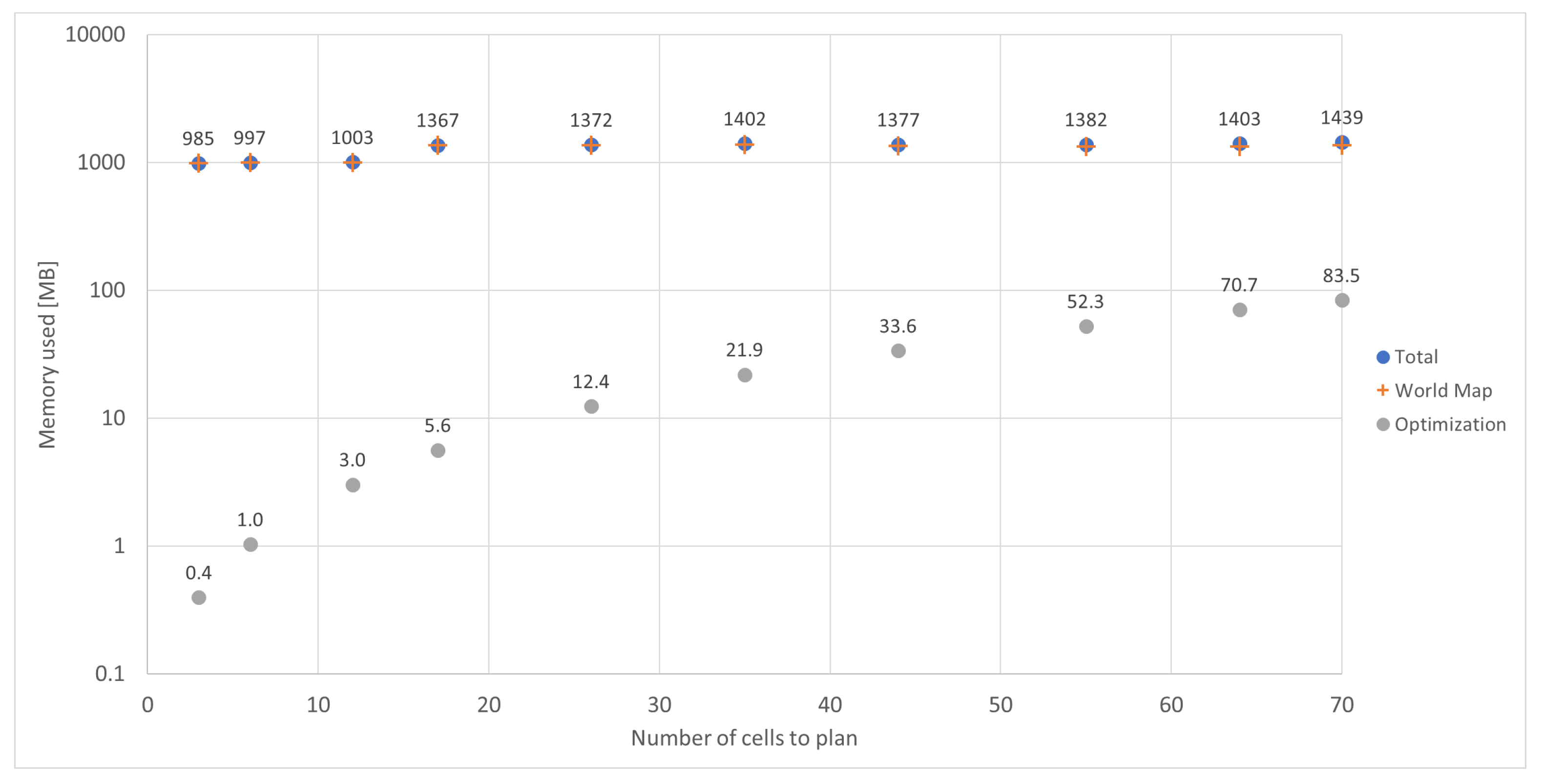
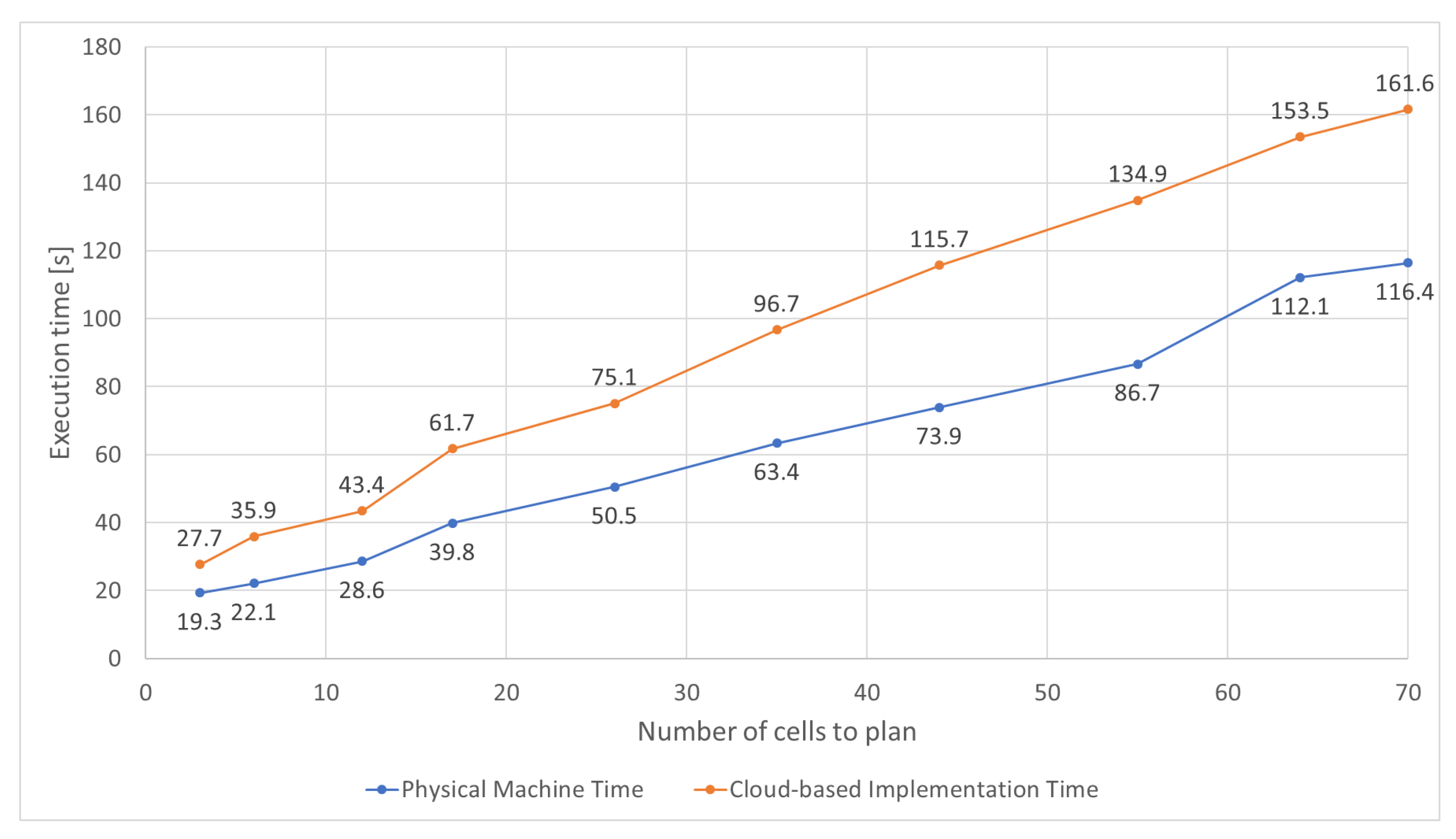
3.2. Implementation Results and Discussion
4. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Ericsson. Ericsson Mobility Report November 2019; Technical Report; Ericsson: Stockholm, Sweden, 2019. [Google Scholar]
- Mishra, A.R. Advanced Cellular Network Planning and Optimisation: 2G/2.5G/3G—Evolution to 4G; John Wiley: Hoboken, NJ, USA, 2007; p. 521. [Google Scholar]
- Huurdeman, A.A. The Worldwide History of Telecommunications; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2003. [Google Scholar] [CrossRef]
- Multivision. Metric Software-as-a-Service; Multivision: Lisbon, Portugal, 2019. [Google Scholar]
- Godinho, A.; Fernandes, D.; Clemente, D.; Soares, G.; Sebastião, P.; Ferreira, L. Cloud-based Cellular Network Planning System: Proof-of-Concept Implementation for GSM in AWS. In Proceedings of the 22nd International Symposium on Wireless Personal Multimedia Communications, Lisbon, Portugal, 24–27 November 2019. [Google Scholar]
- Freeman, R.L. Fundamentals of Telecommunications, 2nd ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2005. [Google Scholar]
- Su, C.; Lan, L.; Yu, C.; Gou, X.; Zhang, X. A new method of frequency planning for new cells in GSM. In Proceedings of the 2010 2nd Conference on Environmental Science and Information Application Technology, ESIAT 2010, Wuhan, China, 17–18 July 2010; Volume 3, pp. 420–423. [Google Scholar] [CrossRef]
- Avram, M. Advantages and Challenges of Adopting Cloud Computing from an Enterprise Perspective. Procedia Technol. 2014, 12, 529–534. [Google Scholar] [CrossRef]
- Ghani, A.; Badshah, A.; Shamshirband, S.; Aceto, G.; Pescape, A. Performance-based Service LevelAgreement in Cloud Computing to OptimizePenalties and Revenue. IET Commun. 2020. [Google Scholar] [CrossRef]
- Amazon. Amazon Web Services; Amazon: Seattle, WA, USA, 2019. [Google Scholar]
- Mell, P.M.; Grance, T. The NIST Definition of Cloud Computing. Recommendations of the National Institute of Standards and Technology; Technical Report; National Institute of Standards and Technology: Gaithersburg, MD, USA, 2011. [Google Scholar] [CrossRef]
- Uenlue, M. Amazon Business Model: Amazon Web Services; Innovation Tactics: Sydney, Australia, 2018. [Google Scholar]
- Roberts, M. Serverless Architectures. Martinfowler.Com. 2016. Available online: https://martinfowler.com/articles/serverless.html (accessed on 4 April 2020).
- AWS. AWS Lambda—Serverless Compute—Amazon Web Services; AWS: Seattle, WA, USA, 2018. [Google Scholar]
- Altair. WinProp Software for Wave Propagation and Radio Planning. Available online: https://altairhyperworks.com/product/Feko/WinProp-Propagation-Modeling (accessed on 4 April 2020).
- Forsk. Atoll Radio Planning Software Overview; Forsk: Toulouse, France, 2020. [Google Scholar]
- Infovista. Mentum Planet 5.7 Streamlines Network Planning, Provides Immediate Gains for Mobile Operators; Infovista: Paris, France, 2013. [Google Scholar]
- Morton, G.M. A Computer Oriented Geodetic Data Base and A New Technique in File Sequencing; Technical Report; IBM Ltd: Ottawa, ON, Canada, 1966. [Google Scholar]
- Gilbert, J.R.; Leiserson, C.E.; Street, C. Parallel Sparse Matrix-Vector and Matrix-Transpose-Vector Multiplication Using Compressed Sparse Blocks Categories and Subject Descriptors. In Proceedings of the Twenty-First Annual Symposium on PARALLELISM in Algorithms and Architectures, Calgary, AB, Canada, 11–13 August 2009. [Google Scholar]
- Valsalam, V.; Skjellum, A. A framework for high-performance matrix multiplication based on hierarchical abstractions, algorithms and optimized low-level kernels. Concurr. Comput. Pract. Exp. 2002, 14, 805–839. [Google Scholar] [CrossRef]
- Bern, M.; Eppslein, D.; Teng, S.H. Parallel construction of quadtrees and quality triangulations. Lect. Notes Comput. Sci. Incl. Subser. Lect. Notes Artif. Intell. Lect. Notes Bioinform. 1993, 709, 188–199. [Google Scholar]
- Niemeyer, G. Geohash| Labix Blog. Available online: https://web.archive.org/web/20080305223755/http://blog.labix.org:80/#post-85 (accessed on 21 June 2019).
- MongoDB. MongoDB Manual—2d Index Internals; MongoDB: New York, MY, USA, 2019. [Google Scholar]
- Hellebrandt, M.; Lambrecht, F.; Mathar, R.; Niessen, T.; Starke, R. Frequency allocation and linear programming. In Proceedings of the IEEE VTS 50th Vehicular Technology Conference, VTC 1999-Fall, Amsterdam, The Netherlands, 19–22 September 1999; Volume 1, pp. 617–621. [Google Scholar]
- Gearhart, J.L.; Adair, K.L.; Detry, R.J.; Durfee, J.D.; Katherine, A.; Martin, N. Comparison of Open-Source Programming Solvers Linear; Technical Report; Sandia National Laboratories: Albuquerque, NM, USA, 2013. [Google Scholar]
- Meindl, B.; Templ, M. Analysis of Commercial and Free and Open Source Solvers for Linear Optimization Problems; Technical Report 1; Institut, F., Statistik, U., Eds.; Wahrscheinlichkeitstheorie: Wien, Austria, 2012. [Google Scholar]
- Tempusenergy. GitHub—Tempusenergy/glpk-Lambda-layer: Use an LP Solver in Your AWS Lambda Functions. Available online: https://github.com/tempusenergy/glpk-lambda-layer (accessed on 21 January 2020).
- Fernandes, D.; Ferreira, L.S.; Nozari, M.; Sebastiao, P.; Cercas, F.; Dinis, R. Combining Drive Tests and Automatically Tuned Propagation Models in the Construction of Path Loss Grids. In Proceedings of the IEEE International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Bologna, Italy, 9–12 September 2018; pp. 1161–1162. [Google Scholar] [CrossRef]
- Forsk. Atoll 3.3.0 Technical Reference Guide for Radio Networks; Technical Report; Forsk: Blagnac, France, 1997. [Google Scholar]
- Java. Java | Oracle; Java: Redwood City, CF, USA, 2019. [Google Scholar]
- The Apache Software Foundation. Maven—Welcome to Apache Maven; The Apache Software Foundation: Forest Hill, MD, USA, 2016. [Google Scholar]
- Fernandes, D.; Ferreira, S.; Soares, G.; Sebasti, P.; Cercas, F.; Dinis, R.; Clemente, D.; Cortes, R. Combining Measurements and Propagation Models for Estimation of Coverage in Wireless Networks. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC-Fall), Honolulu, HI, USA, 22–25 September 2019. [Google Scholar]
- Makhorin, A.M.A.I. GLPK-GNU Project-Free Software Foundation (FSF). Available online: https://www.gnu.org/software/glpk/ (accessed on 17 October 2019).
- Jain, R.; Yao, P. A parallel approximation algorithm for positive semidefinite programming. In Proceedings of the Annual IEEE Symposium on Foundations of Computer Science (FOCS), Palm Springs, CA, USA, 22–25 October 2011; pp. 463–471. [Google Scholar] [CrossRef]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Geohash Length | Cell Width [km] | Cell Height [km] |
|---|---|---|
| 1 | 5000 | 5000 |
| 2 | 1250 | 625 |
| 3 | 156 | 156 |
| 4 | 39.1 | 19.5 |
| 5 | 4.89 | 4.89 |
| 6 | 1.22 | 0.61 |
| 7 | 0.153 | 0.153 |
| 8 | 0.0382 | 0.0191 |
| 9 | 0.00477 | 0.00477 |
| 10 | 0.00119 | 0.000595 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Godinho, A.; Fernandes, D.; Soares, G.; Pina, P.; Sebastião, P.; Correia, A.; Ferreira, L.S. A Novel Way to Automatically Plan Cellular Networks Supported by Linear Programming and Cloud Computing. Appl. Sci. 2020, 10, 3072. https://doi.org/10.3390/app10093072
Godinho A, Fernandes D, Soares G, Pina P, Sebastião P, Correia A, Ferreira LS. A Novel Way to Automatically Plan Cellular Networks Supported by Linear Programming and Cloud Computing. Applied Sciences. 2020; 10(9):3072. https://doi.org/10.3390/app10093072
Chicago/Turabian StyleGodinho, André, Daniel Fernandes, Gabriela Soares, Paulo Pina, Pedro Sebastião, Américo Correia, and Lucio S. Ferreira. 2020. "A Novel Way to Automatically Plan Cellular Networks Supported by Linear Programming and Cloud Computing" Applied Sciences 10, no. 9: 3072. https://doi.org/10.3390/app10093072
APA StyleGodinho, A., Fernandes, D., Soares, G., Pina, P., Sebastião, P., Correia, A., & Ferreira, L. S. (2020). A Novel Way to Automatically Plan Cellular Networks Supported by Linear Programming and Cloud Computing. Applied Sciences, 10(9), 3072. https://doi.org/10.3390/app10093072