Bidirectional Sliding Window for Boundary Recognition of Pavement Construction Area Using GPS-RTK


Abstract
:1. Introduction
2. Boundary Recognition of Pavement Construction Area Using Global Positioning System—Real Time Kinematic (GPS-RTK)
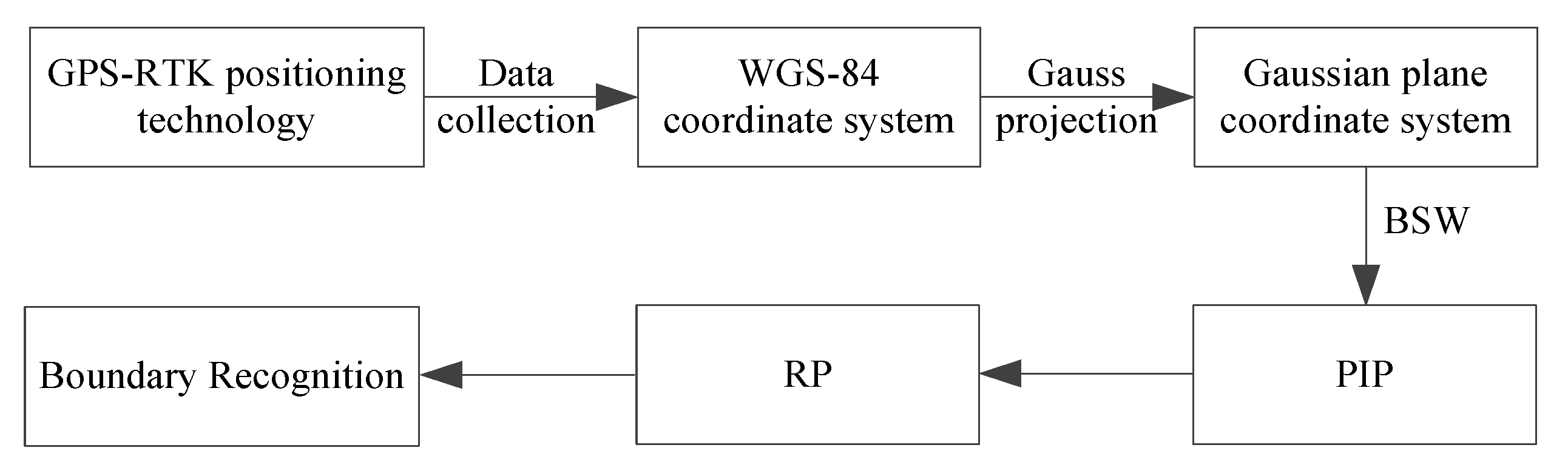
2.1. GPS-RTK Positioning Technology
2.2. WGS-84 Coordinate System to Gaussian Plane Coordinate System
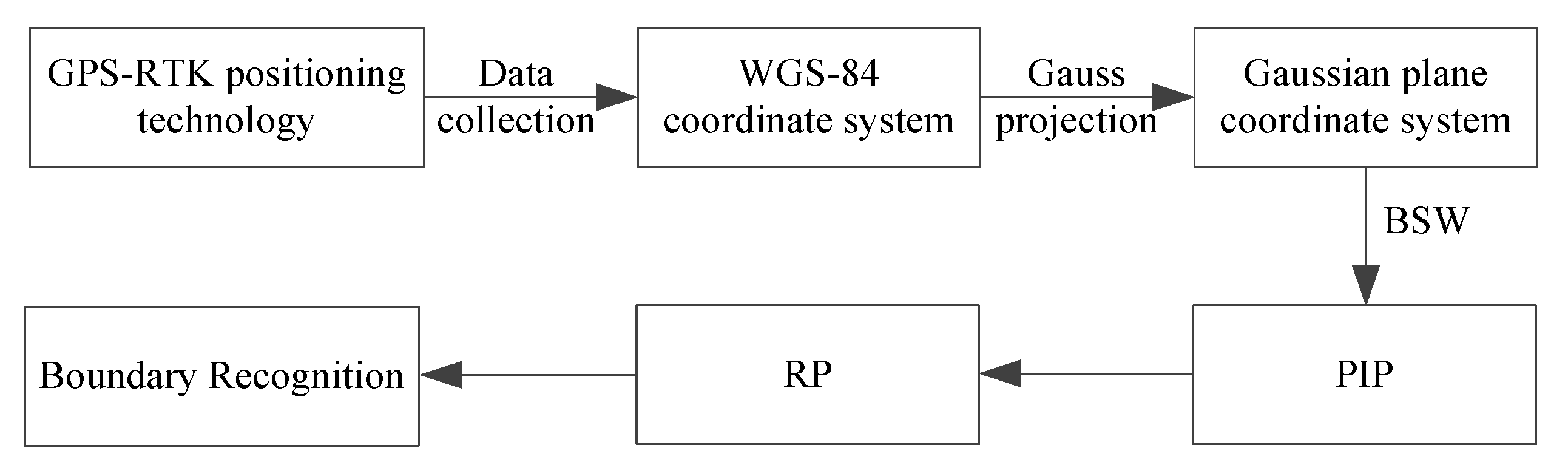
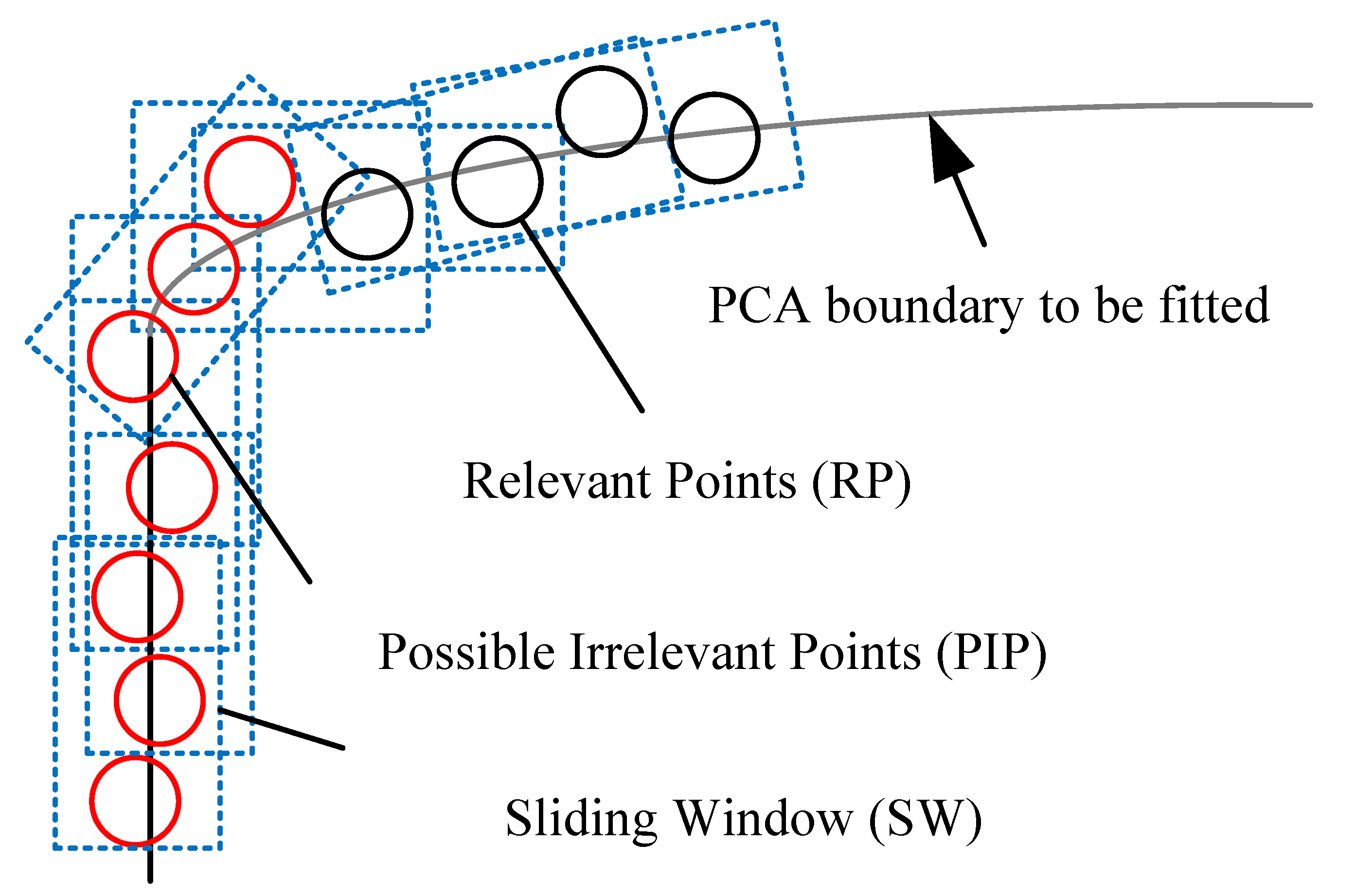
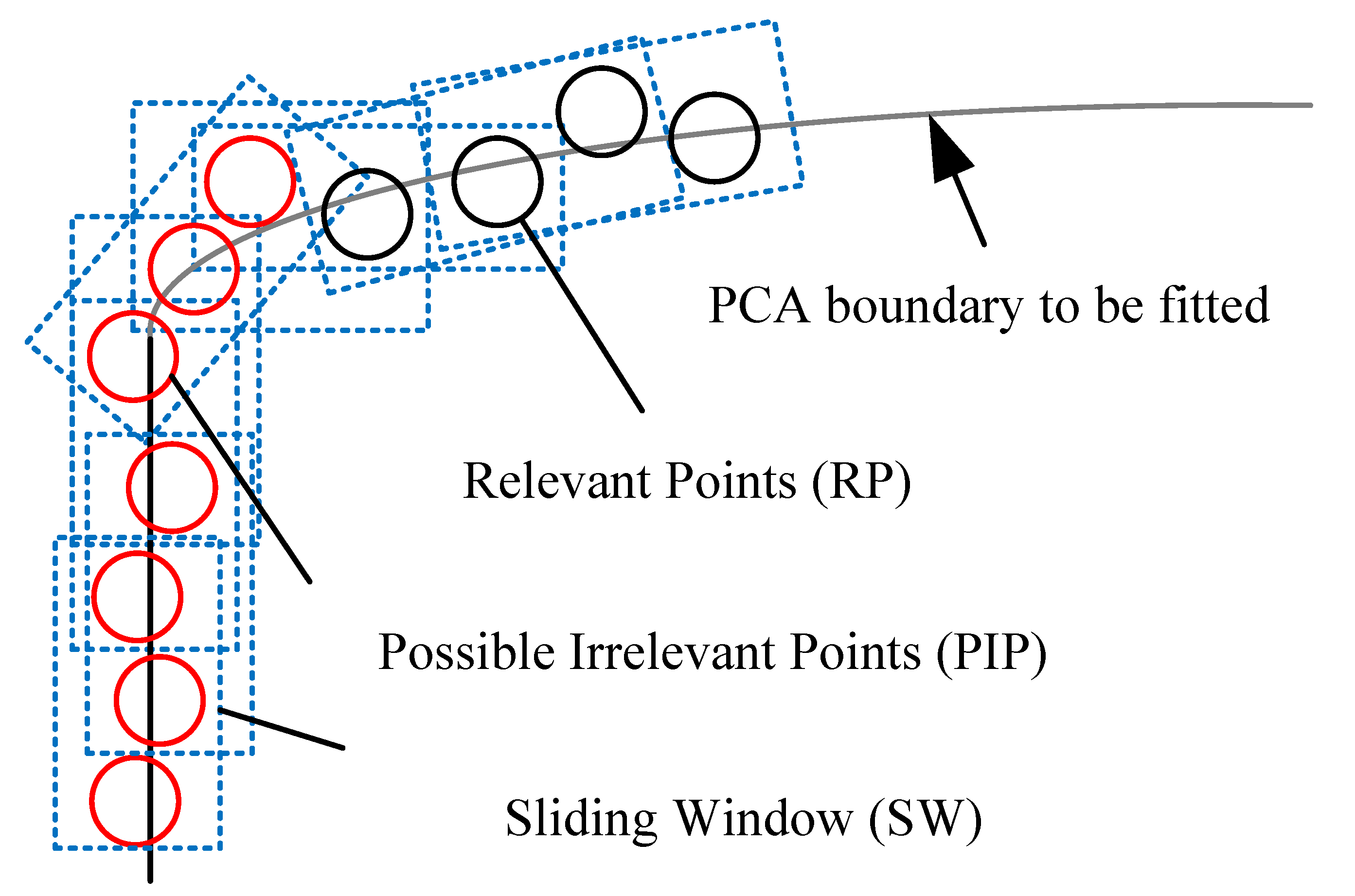
2.3. PCA Boundary Recognition with BSW
| Algorithm 1: Boundary Recognition with BSW |
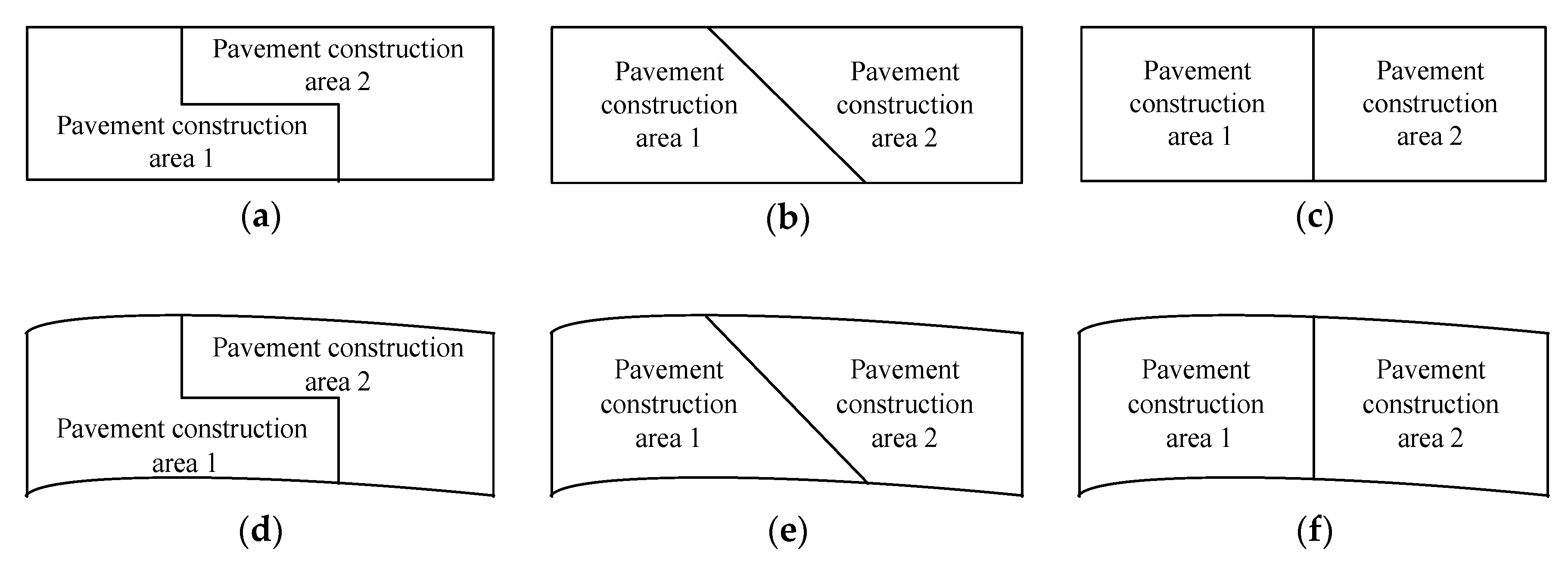
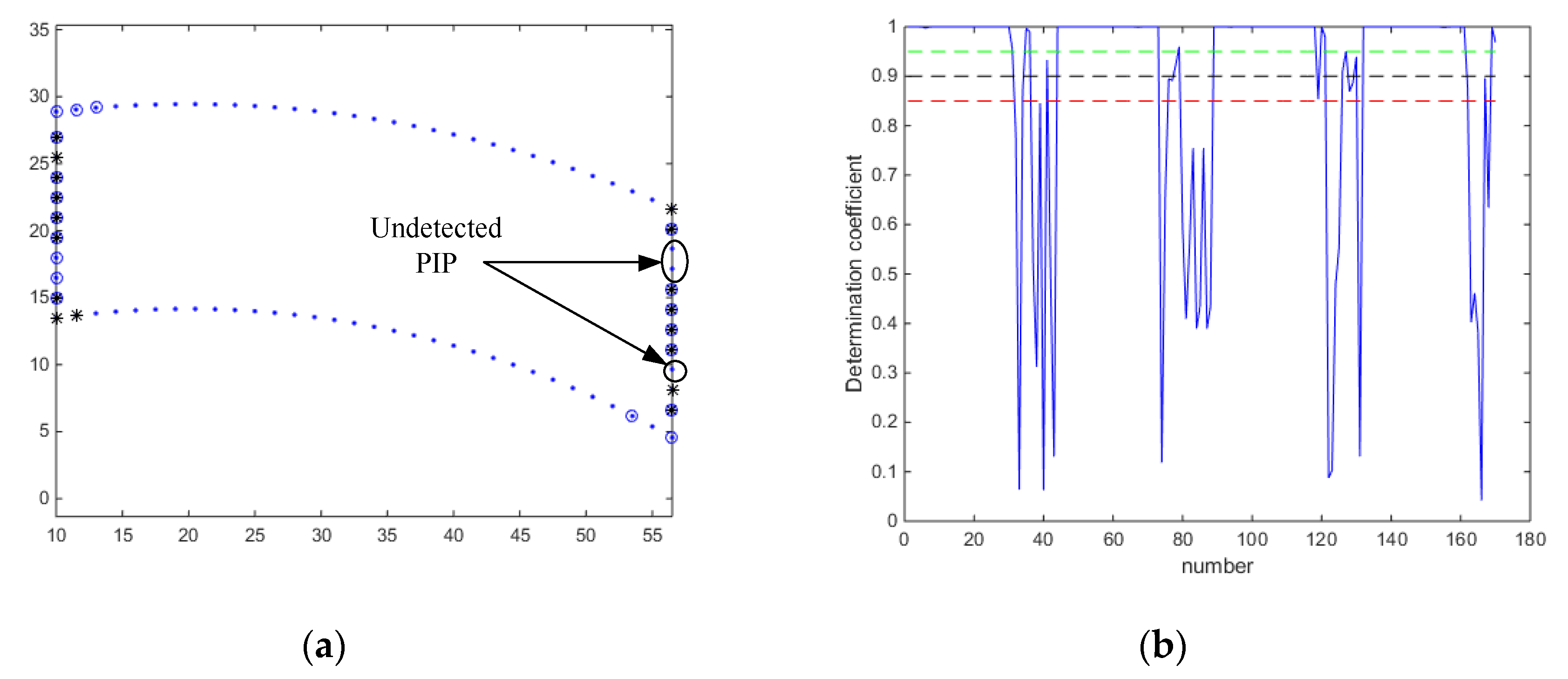
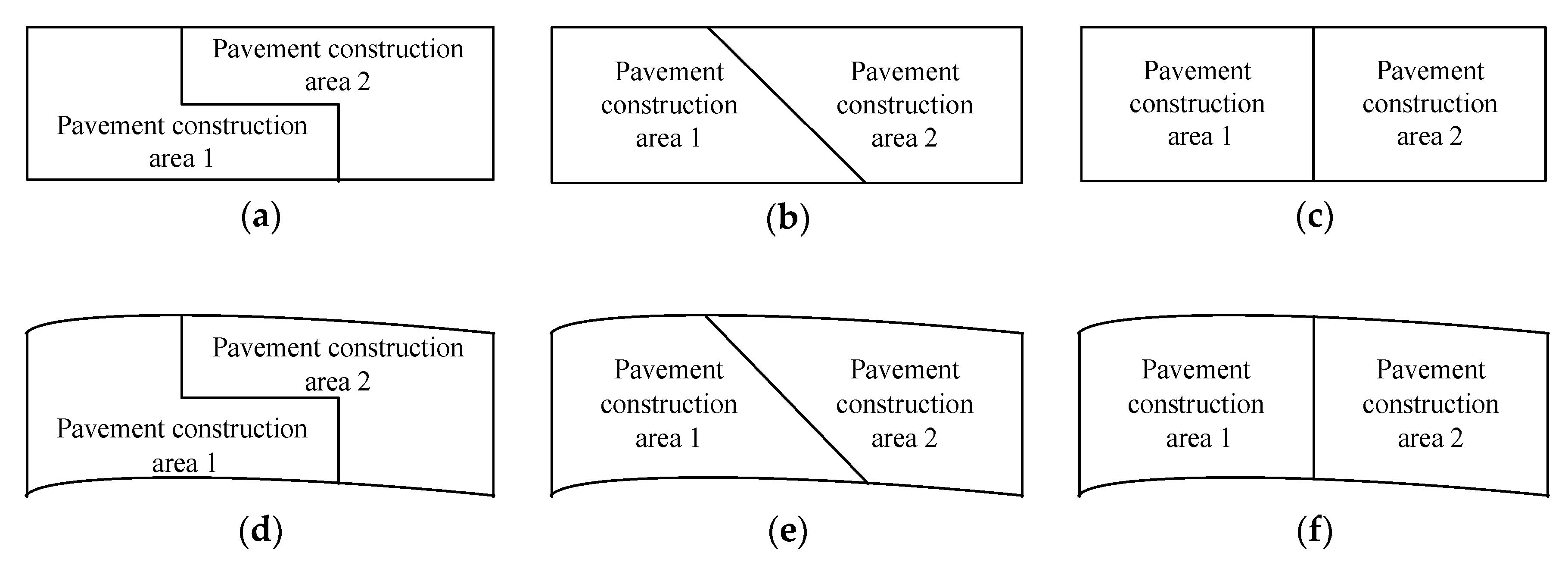
| Input: WindowWidth Output: FittingError, WindowWidth Design a curved quadrilateral as shown in Figure 1f that meets the curvature constraints of the articulated road roller. Sample the curved quadrilateral and add the GPS-RTK measurement error distribution to simulate the acquired boundary data. To avoid data overflow in the experiment, double the boundary data and define variable DoubleBoundaryData as DBD. SWC ← 0, SWA ← 0, PIP ← {Ø}, RP ← {Ø}, While SWC == 0 do | PIPc ← {Ø} | for k ← 1 to K do | | Cofc ← SlidingWindowC (DBD, WindowWidth, k) | | if Cofc > 1 or Cofc <= 0 then | | └ WindowWidth ← WindowWidth + 1, break | | if Cofc < Thresholdc and Cofc > 0 then | | └ PIPc ← PIPc ∪ {DBD.k} | | Extract the set of more than two consecutive PIPc and mark them as C.a,C.b,… C | | if k == K and length(C) == 2 then └ └ └ SWC ← 1 While SWA == 0 do | PIPa ← {Ø} | for k ← 2K to K + 1 do | | Cofa ← SlidingWindowA (DBD, WindowWidth, k) | | if Cofa > 1 or Cofa <= 0 then | | └ WindowWidth ← WindowWidth + 1, break | | if Cofa < Thresholda and Cofa > 0 then | | └ PIPa ← PIPa ∪ {DBD.k} | | Extract the set of more than two consecutive PIPa and mark them as A.a,A.b,… A | | if k == K + 1 and length(A) == 2 then └ └ └ SWA ← 1 PIP ← PIPc ∪ PIPa RP ← DBD \ PIP FittingError ← BoundaryRecognition(RP) |
3. Experiments
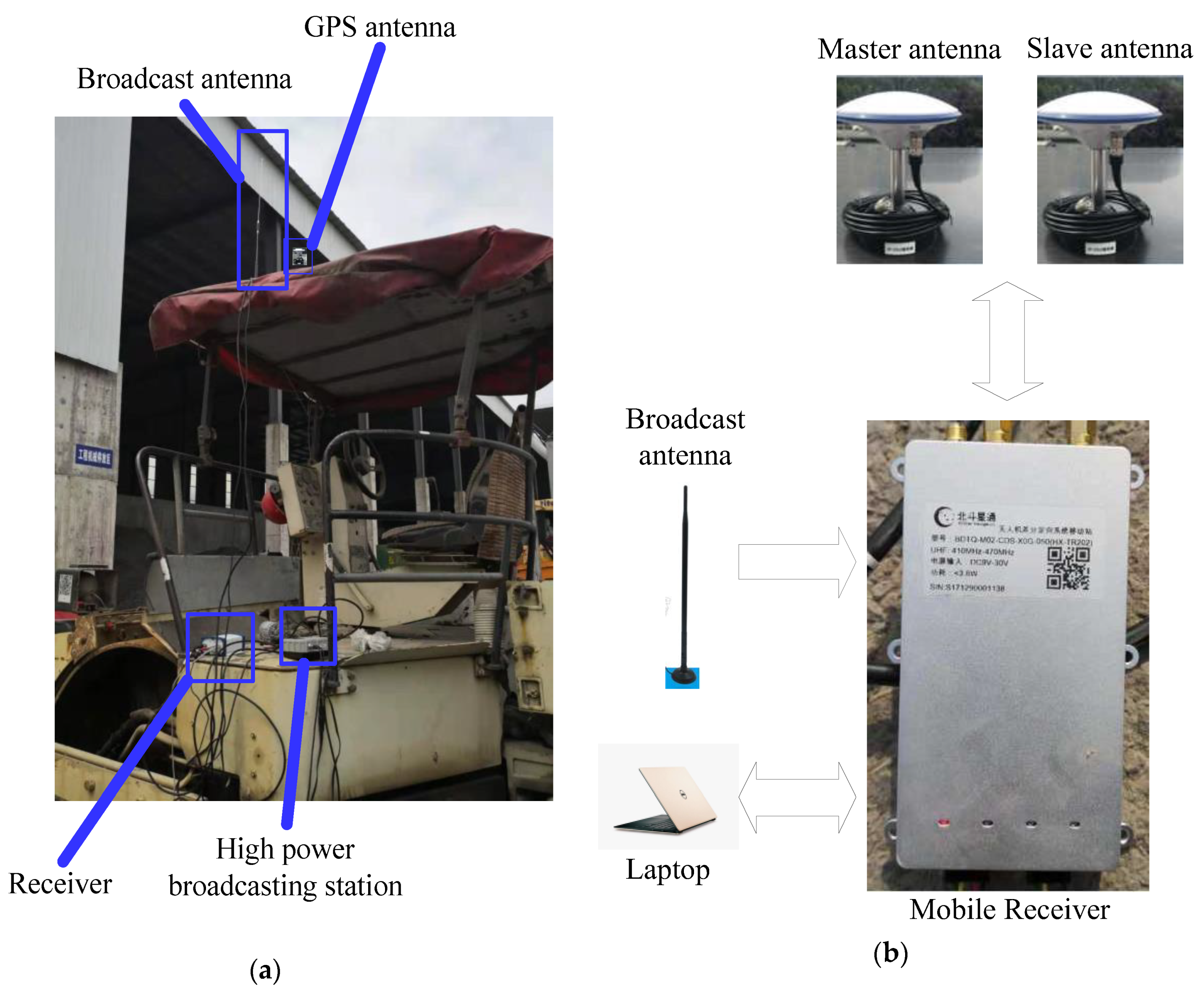
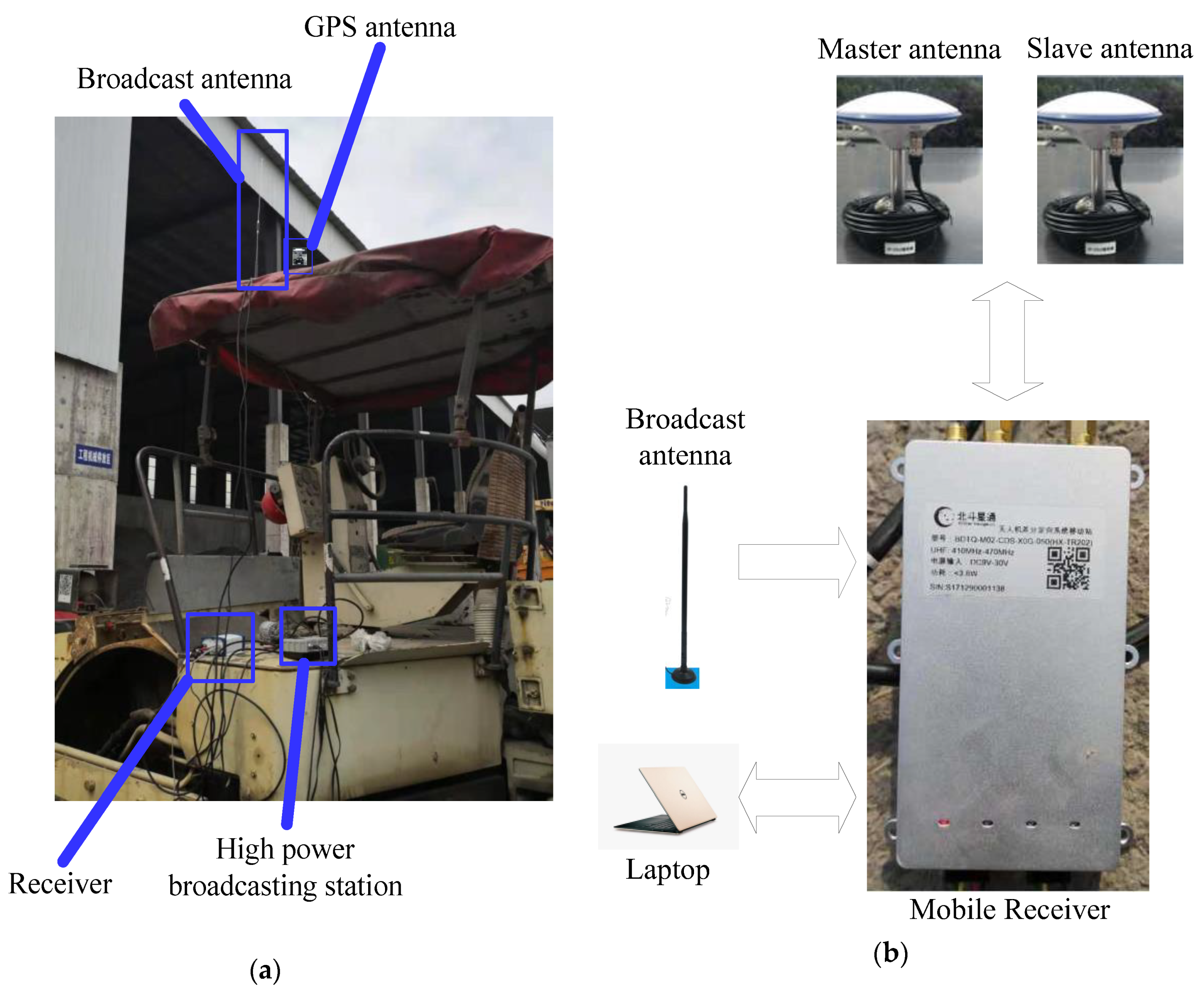
3.1. Experimental Platform
3.2. Single-Point Positioning Accuracy and the Measurement Error Distribution Model
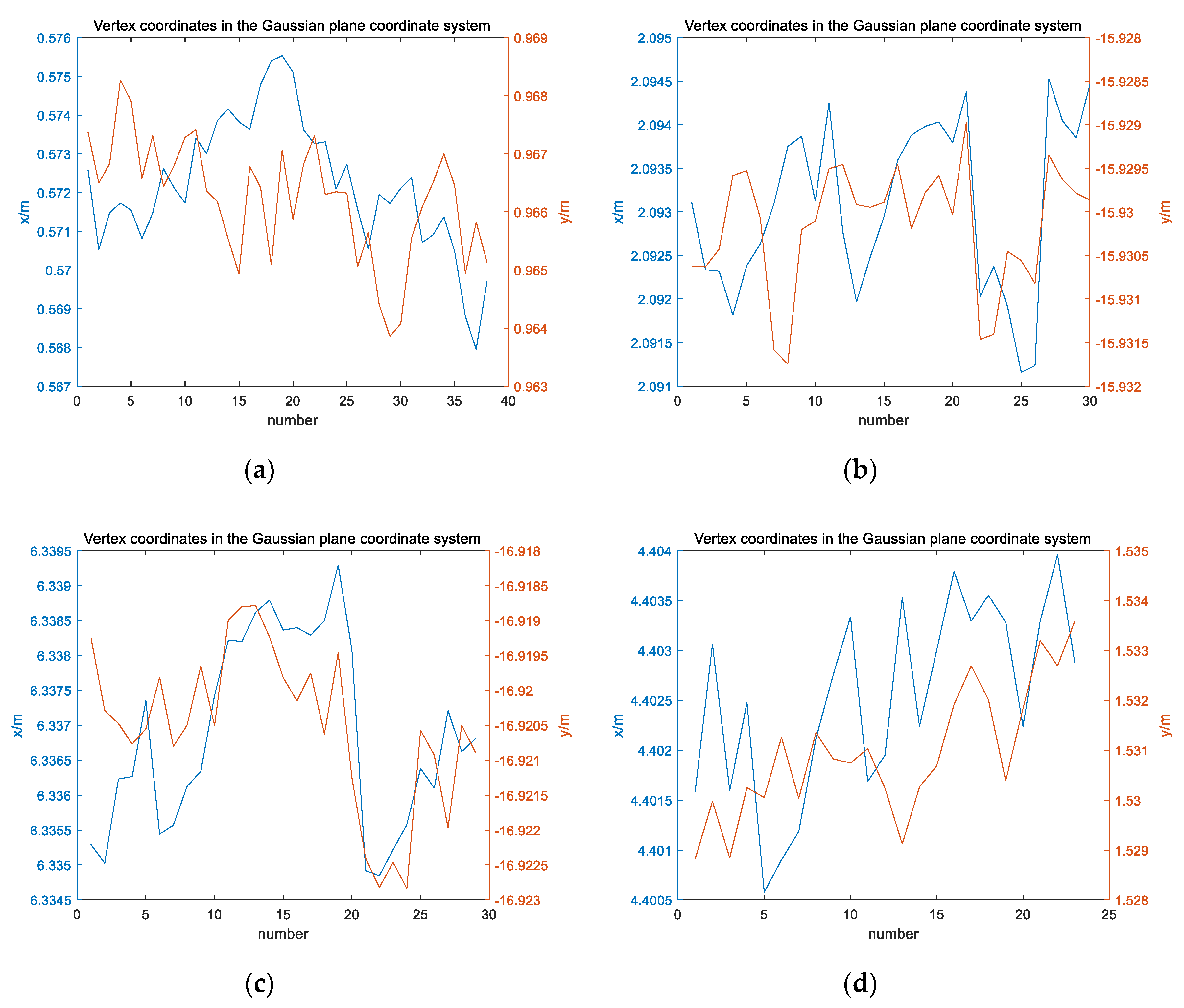
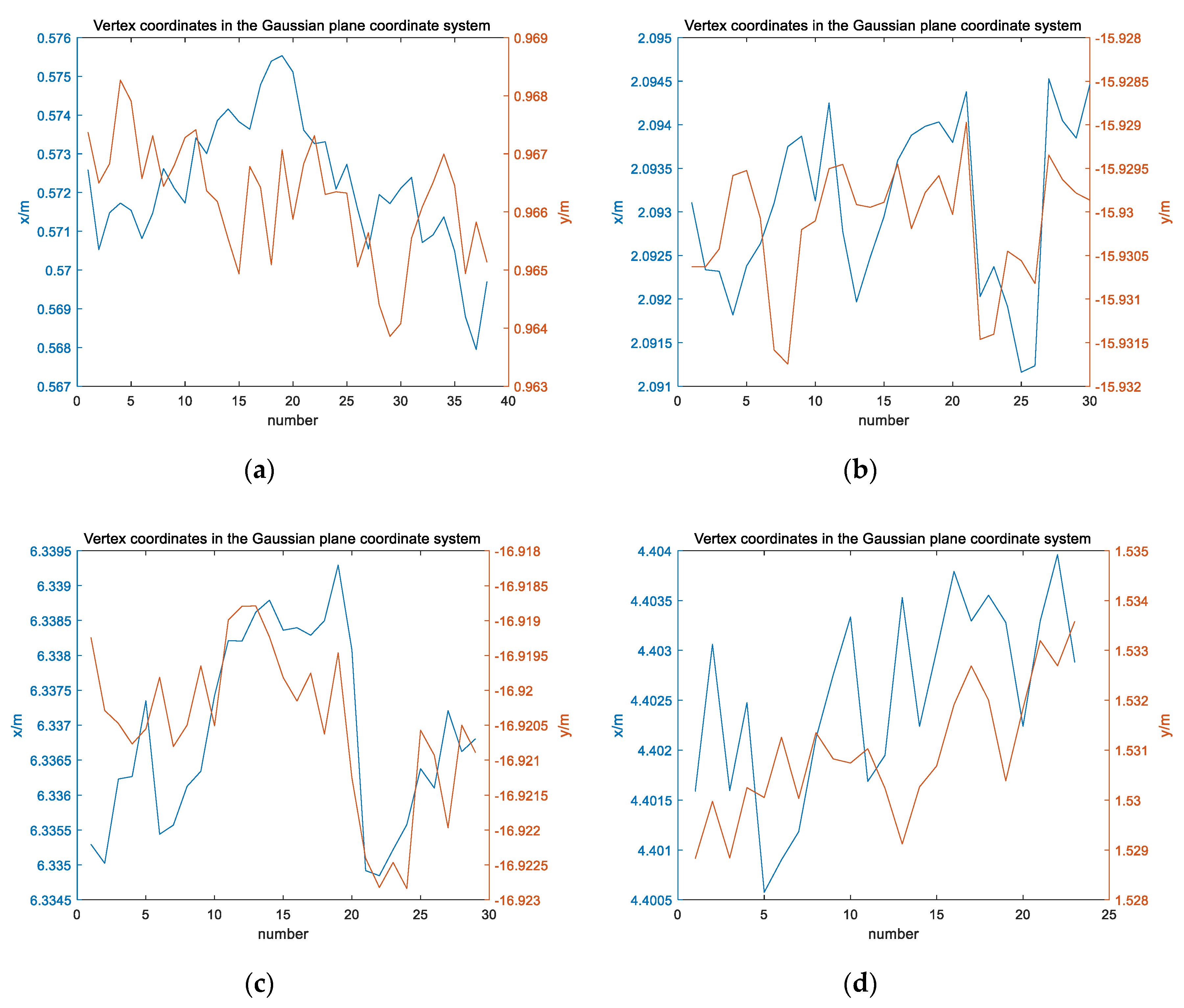
3.2.1. Single-Point Positioning Accuracy
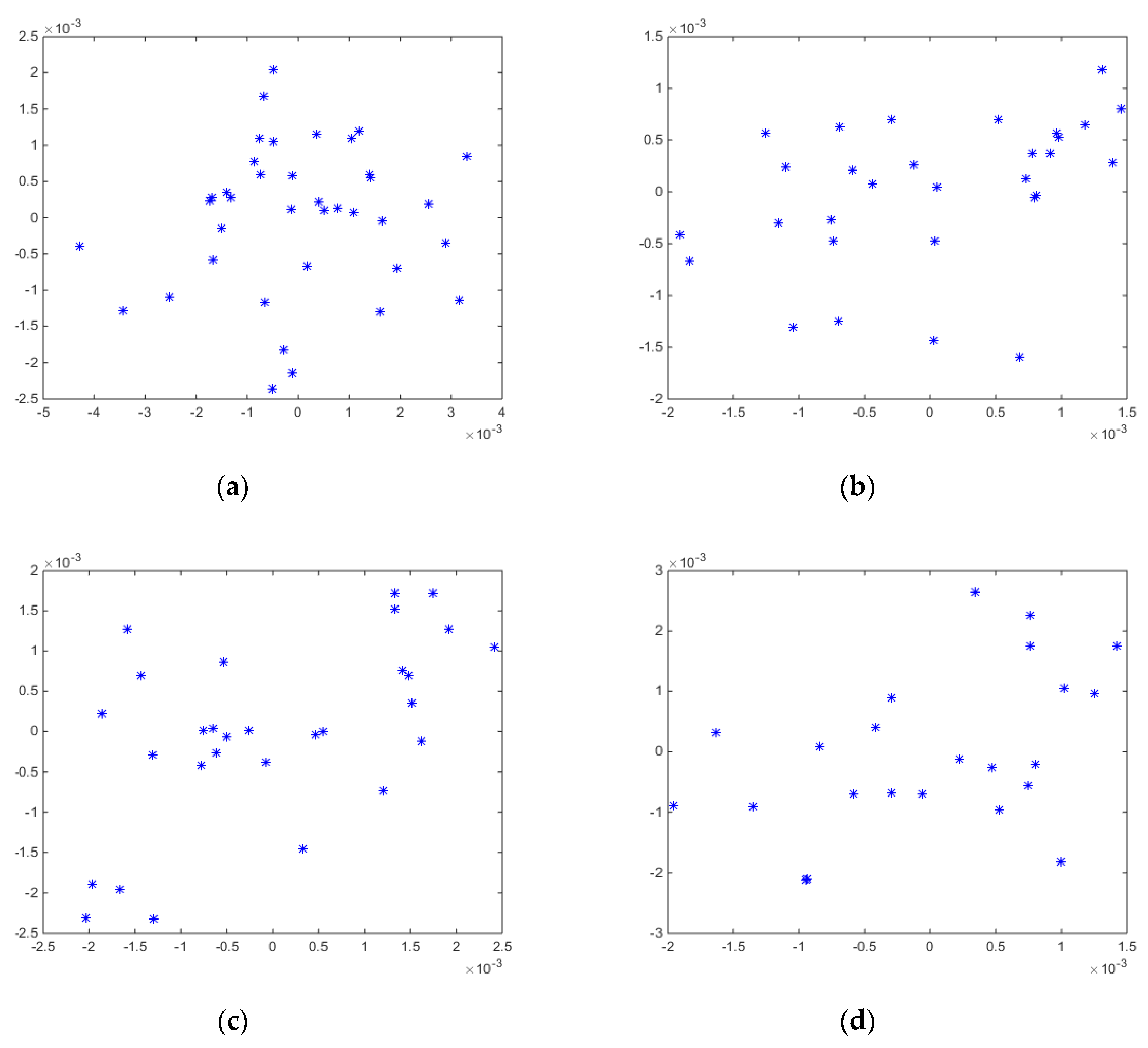
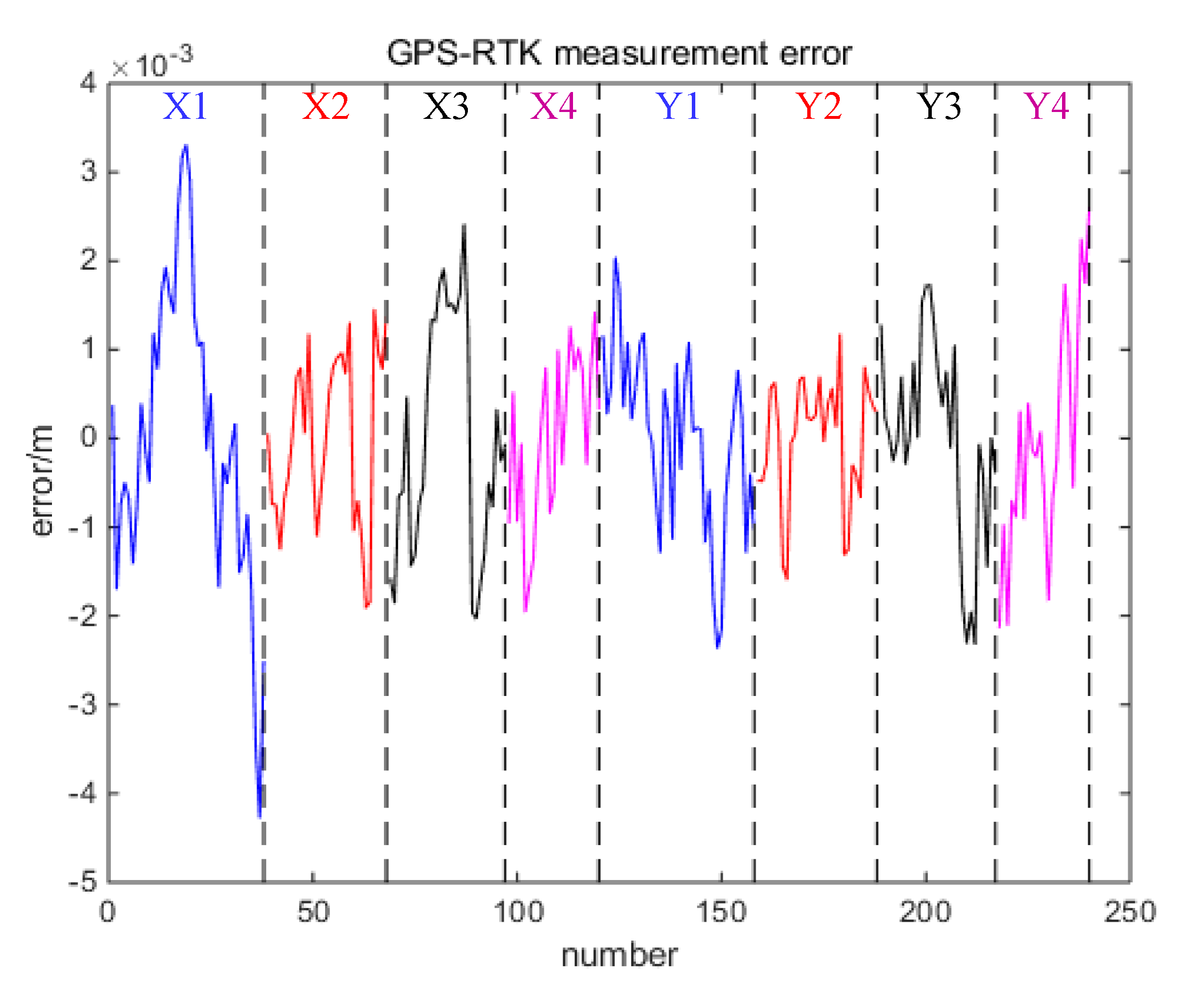
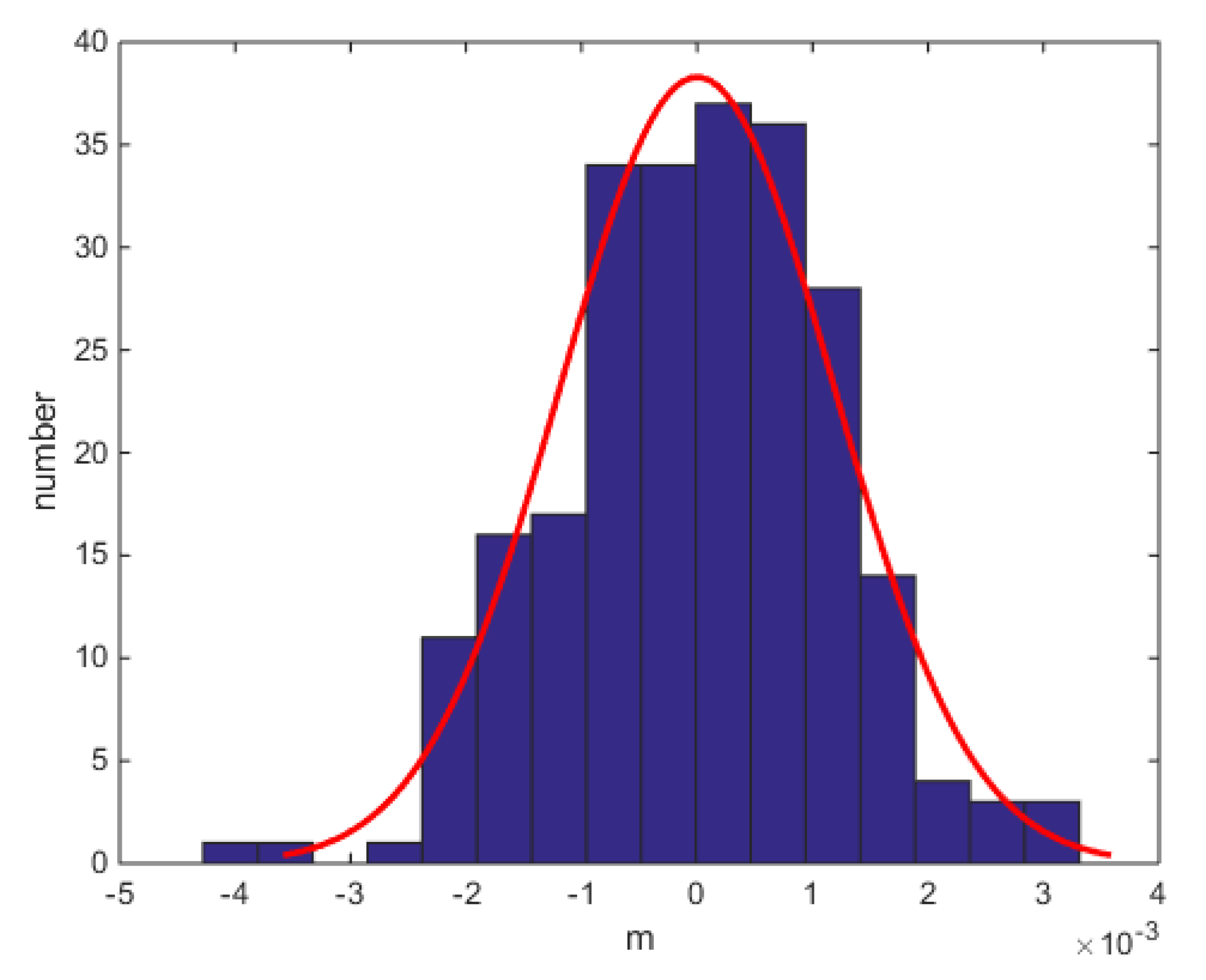
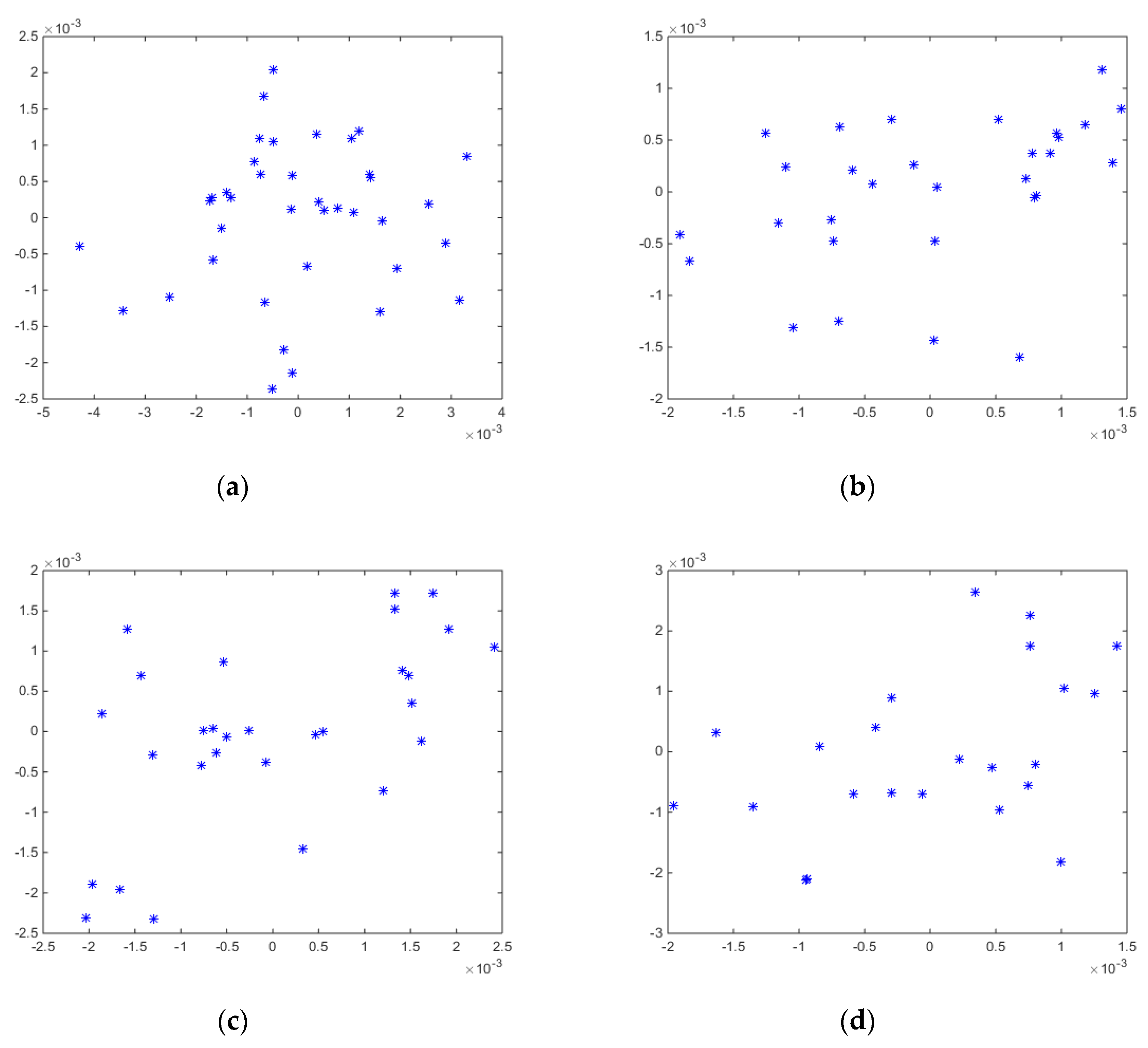
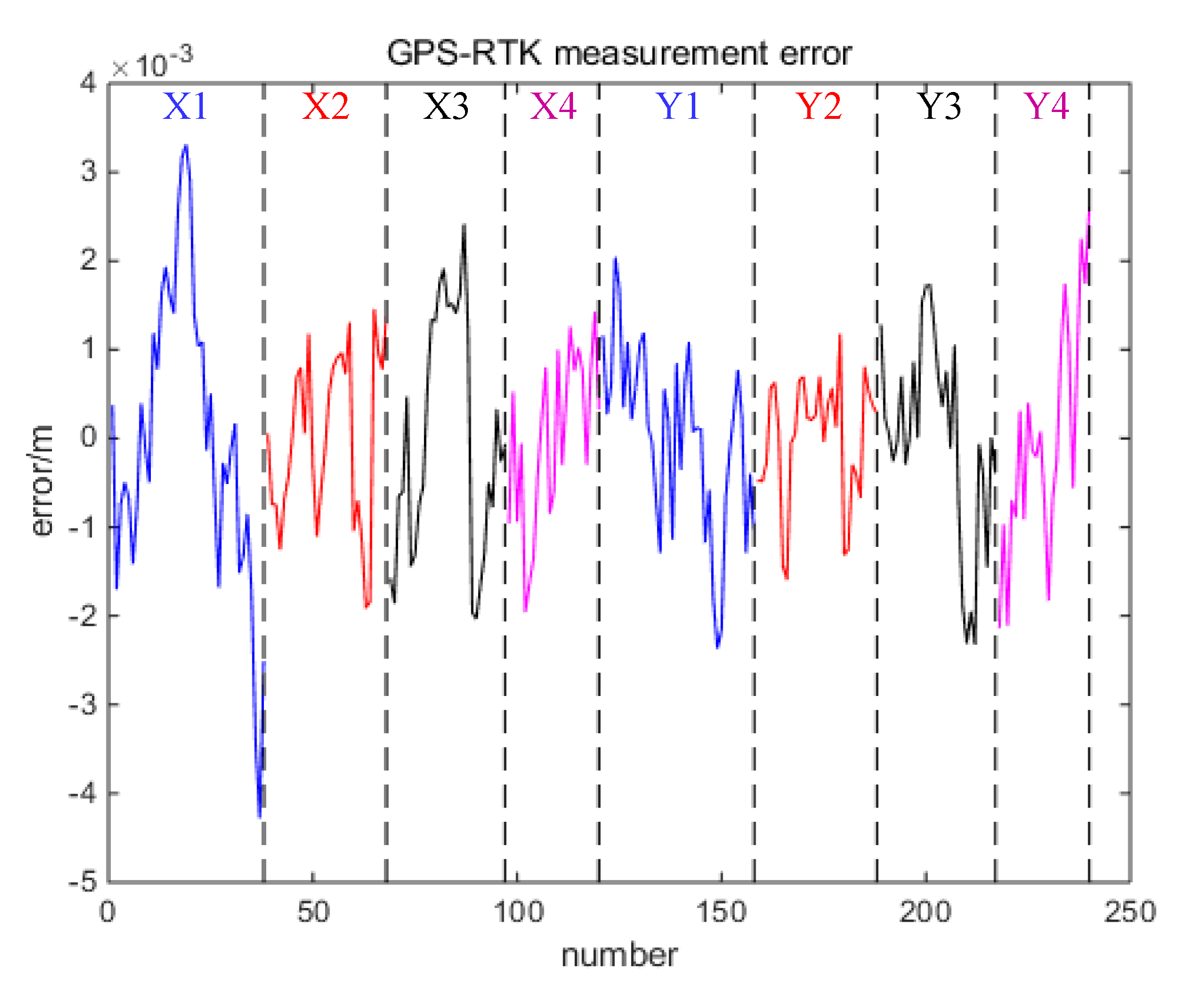
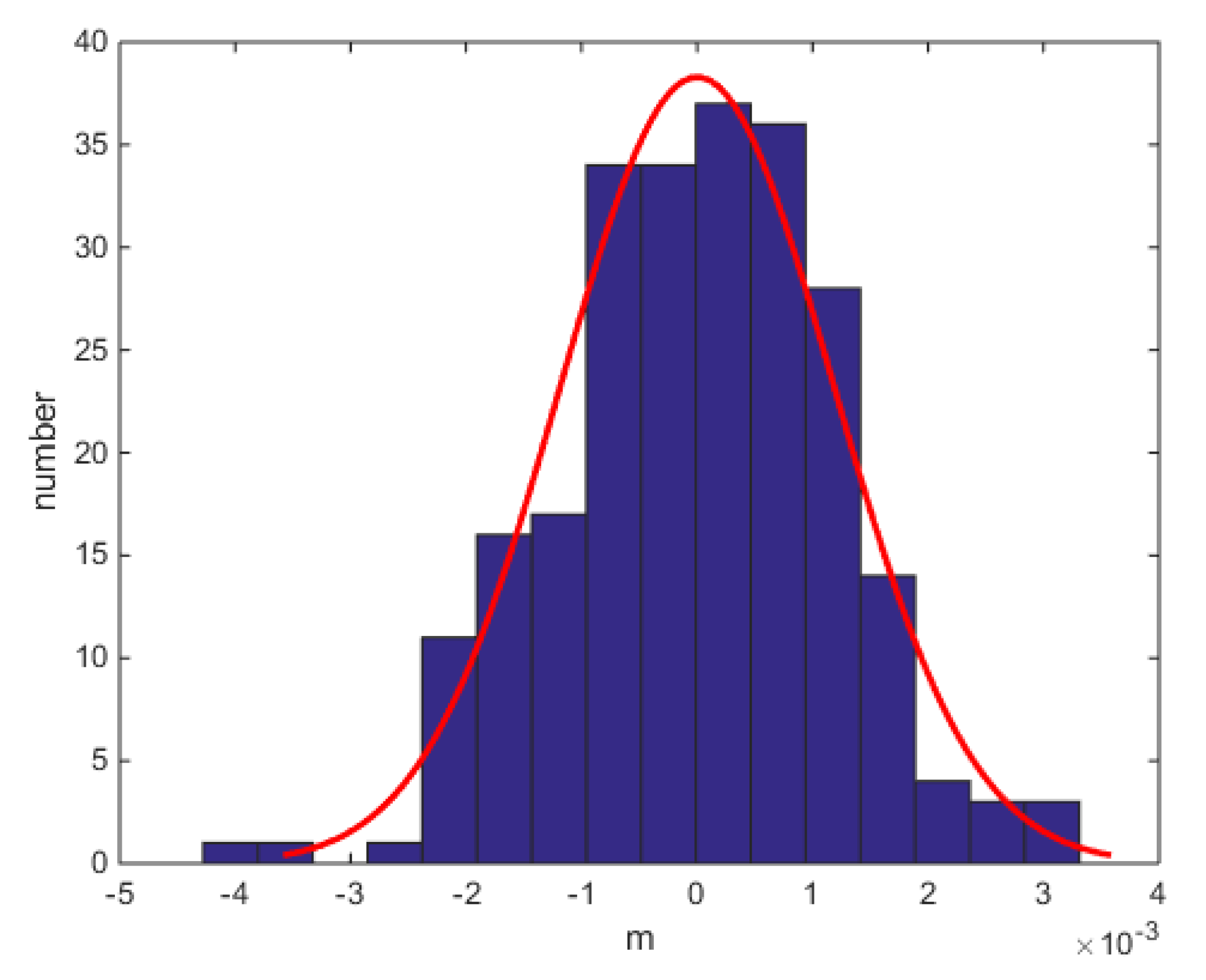
3.2.2. The GPS-RTK Measurement Error Distribution Model
3.3. Recognition of Pavement Construction Area Boundary
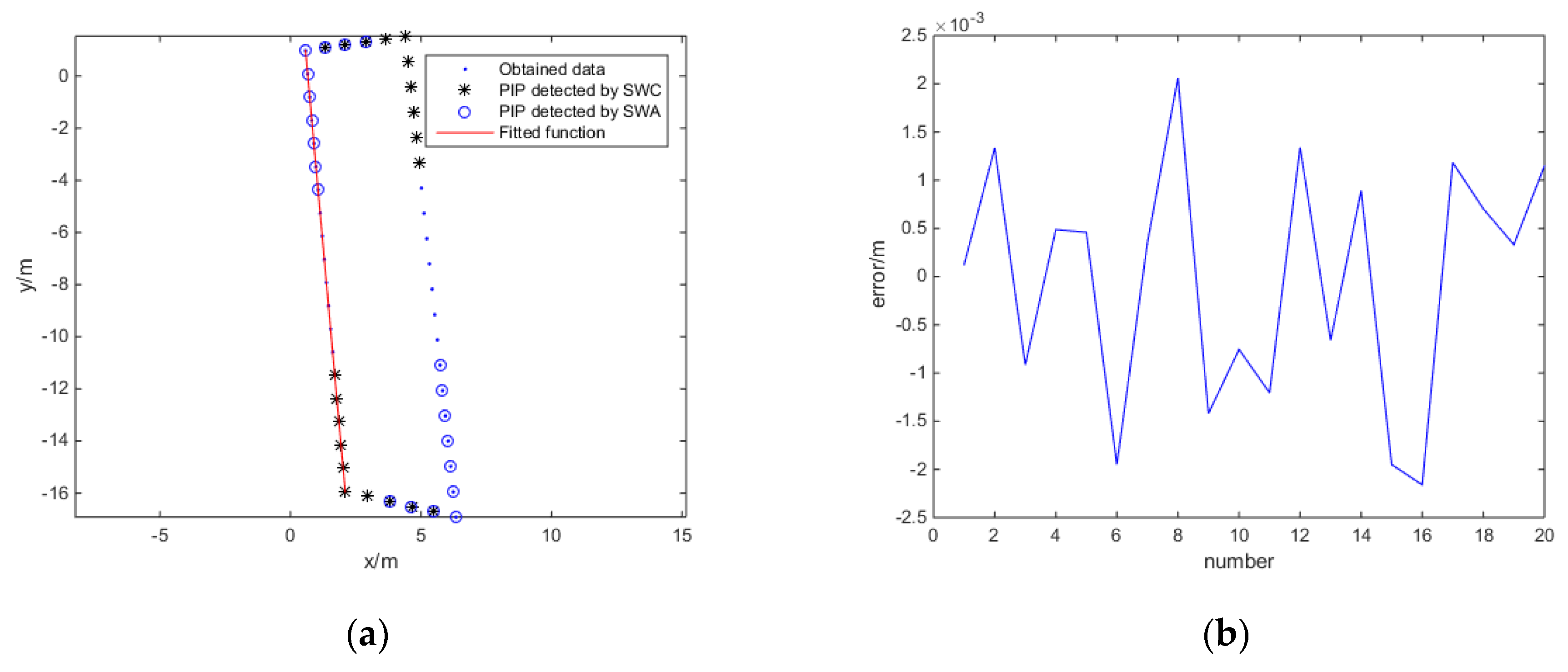
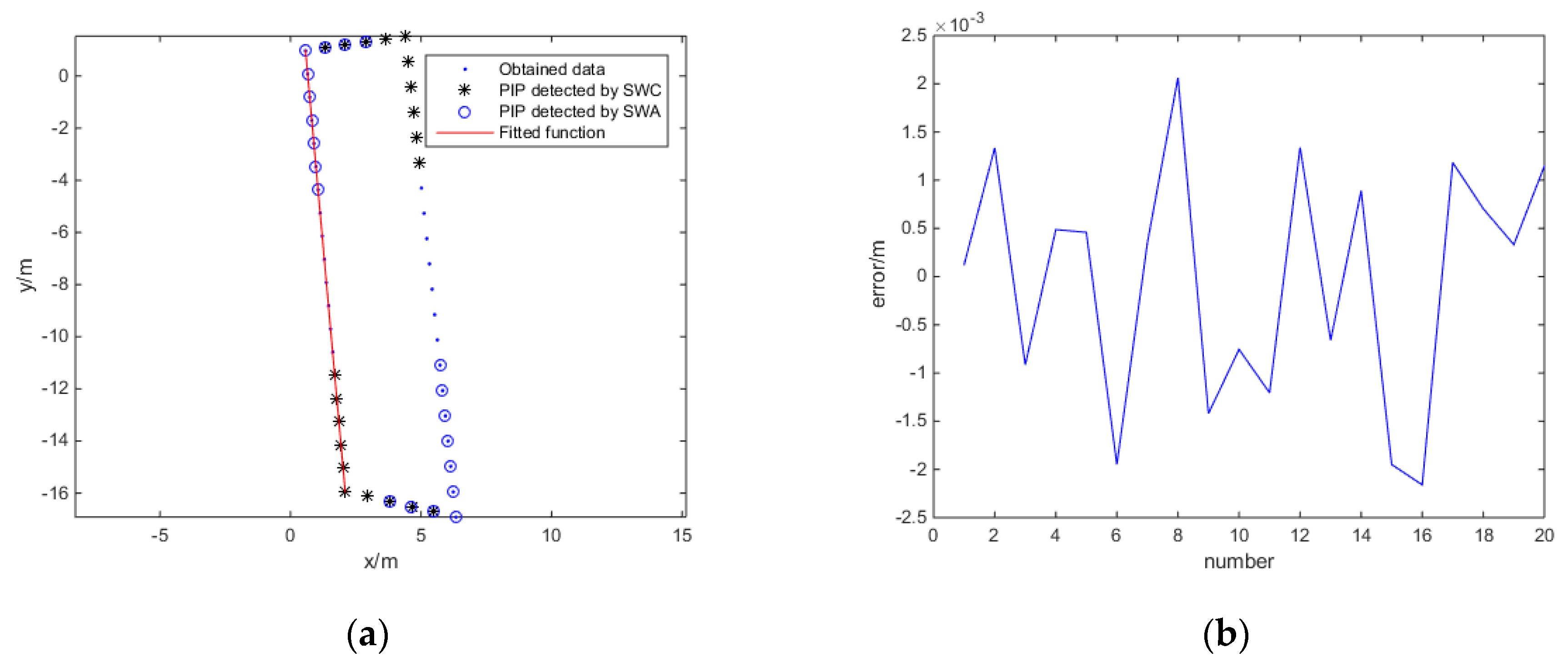
3.3.1. Recognition of Straight Polygon Pavement Construction Area Boundary
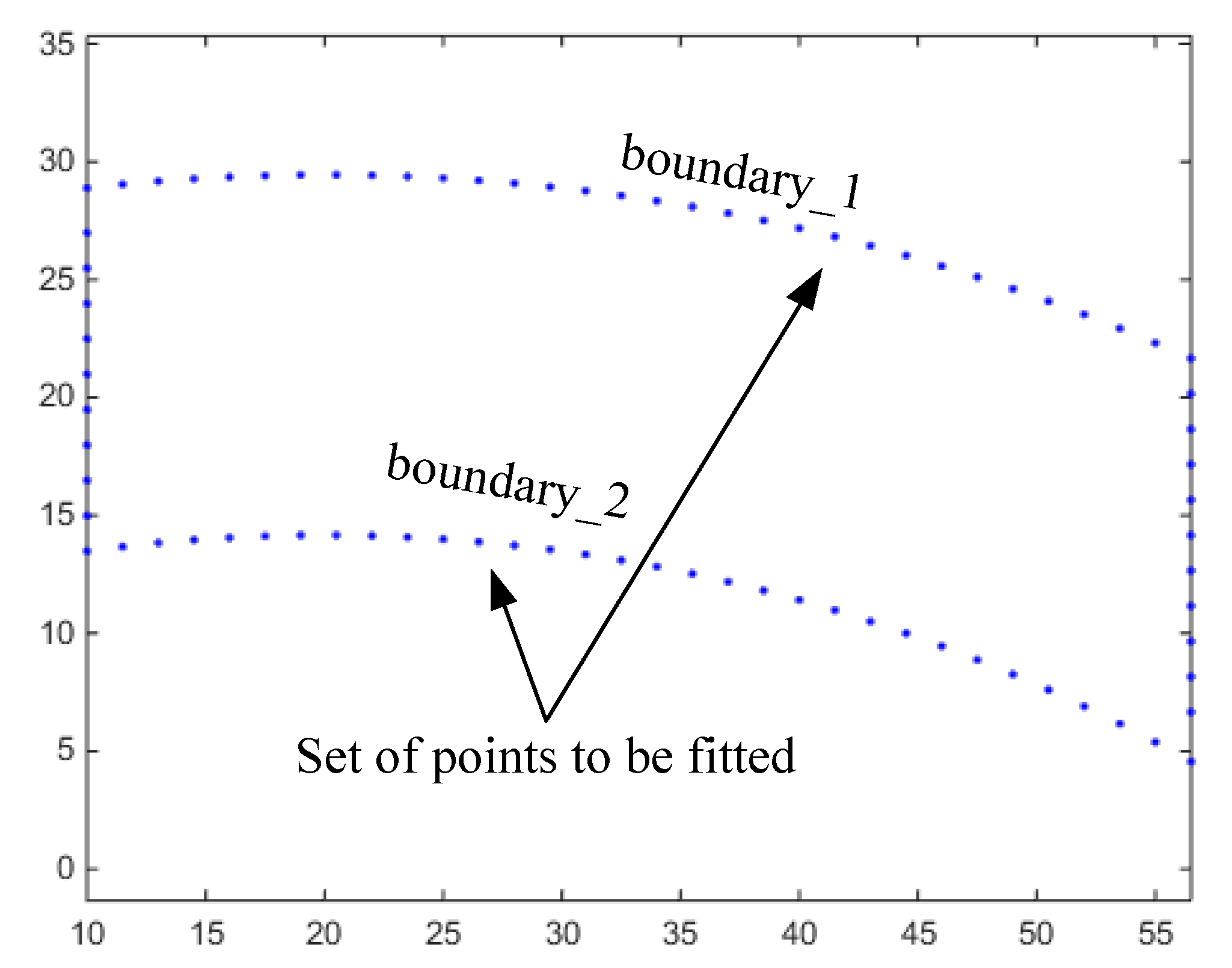
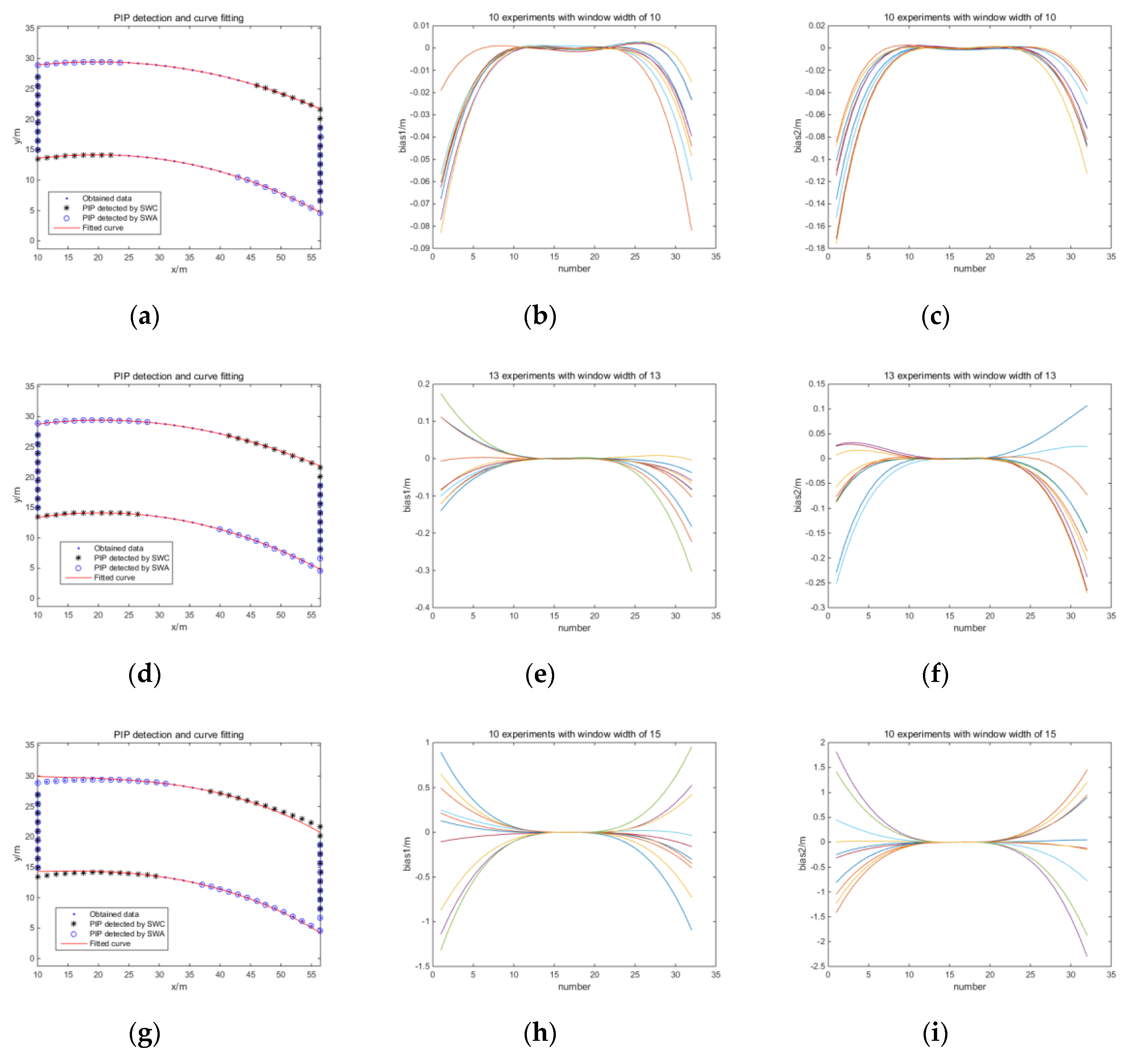
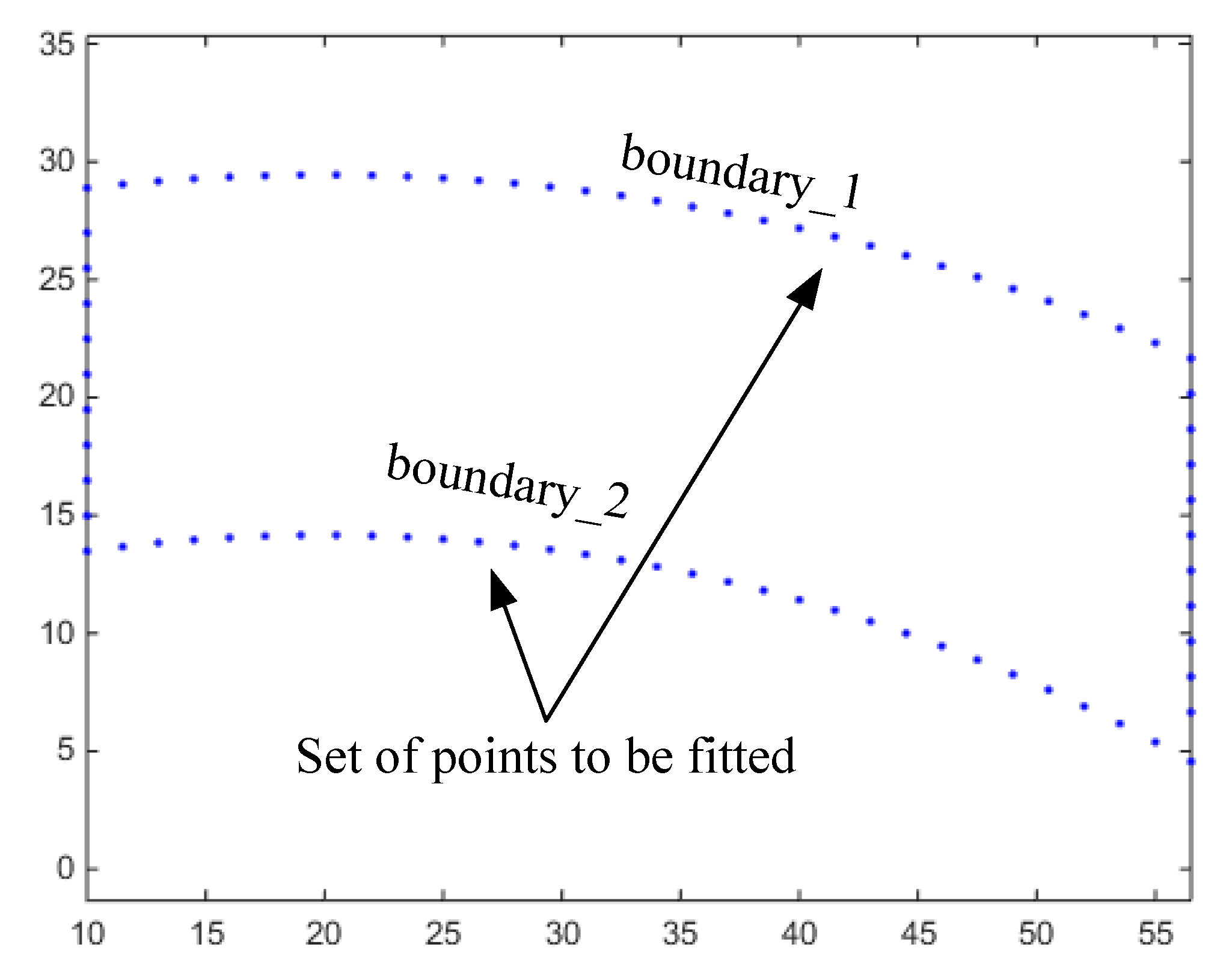
3.3.2. Recognition of Curved Polygon Pavement Construction Area Boundary
3.4. Discussion of Results
4. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Yang, B.; Xu, X.; Li, J.; Zhang, H. Landmark generation in visual place recognition using multi-scale sliding window for robotics. Appl. Sci. 2019, 9, 3146. [Google Scholar] [CrossRef] [Green Version]
- Zhang, Y.; Wang, H.; Zhou, H.; Deng, P. A mixture model for image boundary detection fusion. IEICE Trans. Inf. Syst. 2018, E101D, 1159–1166. [Google Scholar] [CrossRef] [Green Version]
- Kwak, K.; Huber, D.F.; Chae, J.; Kanade, T. Boundary detection based on supervised learning. In Proceedings of the 2010 IEEE International Conference on Robotics and Automation, Anchorage, AK, USA, 3–7 May 2010; pp. 3939–3945. [Google Scholar]
- Li, X.; Wang, D.; Ao, H.; Belaroussi, R.; Gruyer, D. Fast 3D semantic mapping in road scenes. Appl. Sci. 2019, 9, 631. [Google Scholar] [CrossRef] [Green Version]
- Zheng, J.; Yang, S.; Wang, X.; Xia, X.; Xiao, Y.; Li, T. A Decision Tree Based Road Recognition Approach Using Roadside Fixed 3D LiDAR Sensors. IEEE Access 2019, 7, 53878–53890. [Google Scholar] [CrossRef]
- Edelkamp, S.; Schrödl, S. Route planning and map inference with global positioning traces. In Computer Science in Perspective; (Lecture Notes in Computer Science); Springer: Berlin/Heidelberg, Germany, 2003; Volume 2598, pp. 128–151. [Google Scholar]
- Agamennoni, G.; Nieto, J.I.; Nebot, E.M. Robust inference of principal road paths for intelligent transportation systems. IEEE Trans. Intell. Transp. Syst. 2011, 12, 298–308. [Google Scholar] [CrossRef]
- Mobasheri, A.; Huang, H.; Degrossi, L.C.; Zipf, A. Enrichment of OpenStreetMap data completeness with sidewalk geometries using data mining techniques. Sensors. 2018, 18, 509. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Marteau, P.-F. Estimating Road Segments Using Kernelized Averaging of GPS Trajectories. Appl. Sci. 2019, 9, 2736. [Google Scholar] [CrossRef] [Green Version]
- Wang, J.; Rui, X.; Song, X.; Tan, X.; Wang, C.; Raghavan, V. A novel approach for generating routable road maps from vehicle GPS traces. Int. J. Geogr. Inf. Sci. 2015, 29, 69–91. [Google Scholar] [CrossRef]
- Li, Y.; Wang, X.; Liu, D. 3D autonomous navigation line extraction for field roads based on binocular vision. J. Sensors 2019, 12, 1–17. [Google Scholar] [CrossRef] [Green Version]
- Yang, J.; Mariescu-Istodor, R.; Fränti, P. Three Rapid methods for averaging GPS segments. Appl. Sci. 2019, 9, 4899. [Google Scholar] [CrossRef] [Green Version]
- Tang, L.; Ren, C.; Liu, Z.; Li, Q. A road map refinement method using delaunay triangulation for big trace data. ISPRS Int. J. Geo Inf. 2017, 6, 45. [Google Scholar] [CrossRef] [Green Version]
- Xie, X.; Wong, K.B.Y.; Aghajan, H.; Veelaert, P.; Philips, W. Inferring directed road networks from GPS traces by track alignment. ISPRS Int. J. Geo Inf. 2015, 4, 2446–2471. [Google Scholar] [CrossRef] [Green Version]
- Liu, T.; Wang, J.; Yu, H.; Cao, X.; Ge, Y. A new weighting approach with application to ionospheric delay constraint for GPS/GALILEO real-time precise point positioning. Appl. Sci. 2018, 8, 2537. [Google Scholar] [CrossRef] [Green Version]
- Tong, X.U.; Siwei, C.; Dong, W.; Ti, W.U.; Yang, X.U.; Weigong, Z. A Novel Path Planning Method for Articulated Road Roller Using Support Vector Machine and Longest Accessible Path with Course Correction. IEEE Access 2019, 7, 182784–182795. [Google Scholar] [CrossRef]


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Cov(X1,Y1) | X1 | Y1 | Cov(X2,Y2) | X2 | Y2 |
|---|---|---|---|---|---|
| X1 | 2.93 × 10−6 | 1.71 × 10−7 | X2 | 9.65 × 10−7 | 2.81 × 10−7 |
| Y1 | 1.71 × 10−7 | 1.04 × 10−6 | Y2 | 2.81 × 10−7 | 4.97 × 10−7 |
| Cov(X3,Y3) | X3 | Y3 | Cov(X4,Y4) | X4 | Y4 |
| X3 | 1.86 × 10−6 | 8.94 × 10−7 | X4 | 9.18 × 10−7 | 5.59 × 10−7 |
| Y3 | 8.94 × 10−7 | 1.30 × 10−6 | Y4 | 5.59 × 10−7 | 1.72 × 10−6 |
| Coordinate Parameter | Value Range/m | Coordinate Parameter | Value Range/m |
|---|---|---|---|
| X1 | (0.5717,0.5728) | Y1 | (0.9659,0.9666) |
| X2 | (2.0927,2.0934) | Y2 | (−15.9304,−15.9299) |
| X3 | (6.3364,6.3374) | Y3 | (−16.9209,−16.9201) |
| X4 | (4.4021,4.4029) | Y4 | (1.5304,1.5315) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Xu, T.; Chen, S.; Wang, D.; Zhang, W. Bidirectional Sliding Window for Boundary Recognition of Pavement Construction Area Using GPS-RTK. Appl. Sci. 2020, 10, 1277. https://doi.org/10.3390/app10041277
Xu T, Chen S, Wang D, Zhang W. Bidirectional Sliding Window for Boundary Recognition of Pavement Construction Area Using GPS-RTK. Applied Sciences. 2020; 10(4):1277. https://doi.org/10.3390/app10041277
Chicago/Turabian StyleXu, Tong, Siwei Chen, Dong Wang, and Weigong Zhang. 2020. "Bidirectional Sliding Window for Boundary Recognition of Pavement Construction Area Using GPS-RTK" Applied Sciences 10, no. 4: 1277. https://doi.org/10.3390/app10041277
APA StyleXu, T., Chen, S., Wang, D., & Zhang, W. (2020). Bidirectional Sliding Window for Boundary Recognition of Pavement Construction Area Using GPS-RTK. Applied Sciences, 10(4), 1277. https://doi.org/10.3390/app10041277